Система с подвижным роботом и способ дистанционного управления таким роботом - RU2320020C1
Код документа: RU2320020C1
Чертежи








Описание
Перекрестная ссылка на связанные заявки
Заявляется приоритет согласно заявке №2005-79849, поданной 30 августа 2005 г. в Корейское бюро по защите интеллектуальной собственности; содержание этой заявки включено в настоящее описание путем ссылки.
Область техники
Настоящее изобретение относится к подвижному роботу, а в частности к системе с подвижным роботом и к способу дистанционного управления такой системой.
Уровень техники
В общем случае подвижный робот - это робот, который автономно перемещается для выполнения поставленной задачи. Примеры подвижных роботов включают робота-уборщика, робота-контролера или аналогичное устройство. В последнее время особенно популярными среди таких подвижных роботов стали роботы-уборщики.
Такой подвижный робот обычно способен автономно выполнять требуемую задачу, например очистку, контролирование или аналогичную операцию. Пользователь может управлять подвижным роботом с использованием панели управления, имеющейся на корпусе подвижного робота или пульта дистанционного управления. Однако управление таким подвижным роботом посредством панели управления или пульта дистанционного управления возможно только тогда, когда пользователь расположен около подвижного робота.
Поэтому необходимо иметь такую систему с подвижным роботом с дистанционным управлением, которая обеспечивает управление подвижными роботами даже тогда, когда пользователь не находится около робота.
Сущность изобретения
Соответственно настоящее изобретение призвано решить вышеуказанные задачи и целью настоящего изобретения является создание такой системы с подвижным роботом, в которой подвижным роботом можно управлять по существу из любого места, а также создание способа дистанционного управления таким роботом.
В связи с этим, первый аспект настоящего изобретения относится к созданию системы с подвижным роботом, которая включает: подвижного робота; парковочную станцию для обслуживания подвижного робота; блок соединения вызова, расположенный в парковочной станции и способный принимать телефонный вызов и блок преобразования сигнала вызова, способный преобразовывать вызов в управляющий сигнал и передавать управляющий сигнал подвижному роботу.
В своем втором аспекте настоящее изобретение относится к способу дистанционного управления подвижным роботом, включающим: передачу сигнала, соответствующего задаче; преобразование этого сигнала в управляющий сигнал; передачу управляющего сигнала подвижному роботу и обеспечение выполнения задачи подвижным роботом на основе управляющего сигнала.
Краткое описание чертежей
Вышеуказанные аспекты и особенности настоящего изобретения будут понятнее из последующего описания неограничивающих вариантов его выполнения со ссылками на сопровождающие чертежи, где:
На фиг.1 схематично показана система с подвижным роботом, которая связана с телефонной линией согласно одному из вариантов выполнения настоящего изобретения;
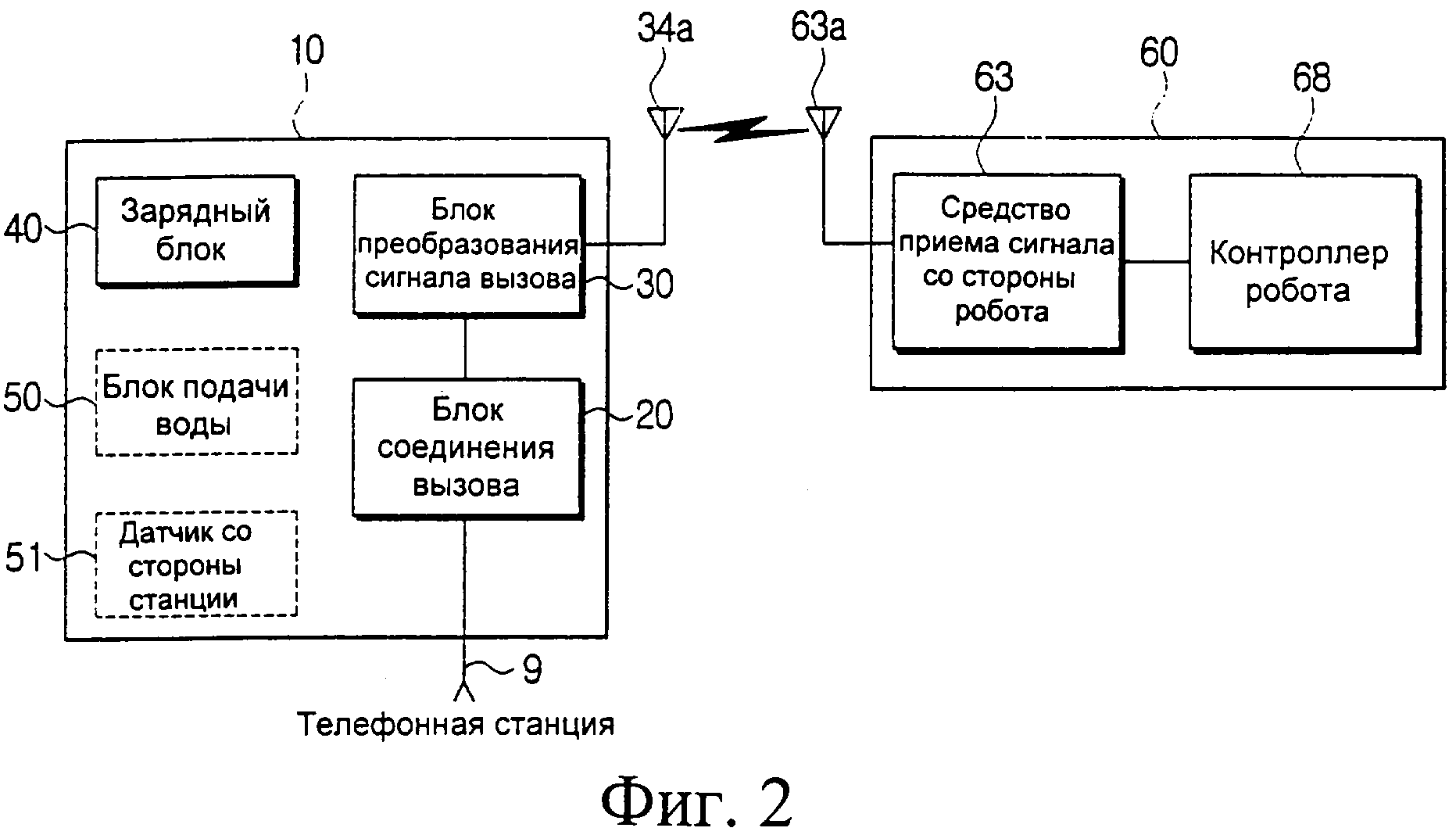
на фиг.2 показана блок-схема, иллюстрирующая пример конфигурации системы с подвижным роботом, изображенной на фиг.1;
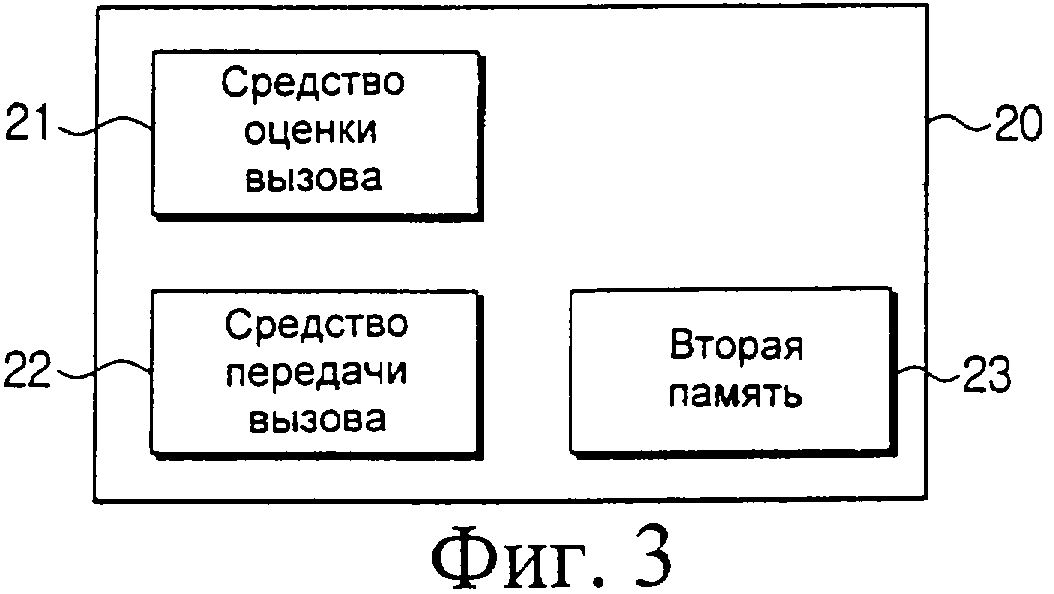
на фиг.3 показана блок-схема, иллюстрирующая пример блока соединения вызова в парковочной станции в системе с подвижным роботом согласно варианту выполнения настоящего изобретения, изображенному на фиг.2;
на фиг.4 показана блок-схема, иллюстрирующая типичный блок преобразования сигнала вызова в парковочной станции в системе с подвижным роботом согласно варианту выполнения настоящего изобретения, изображенному на фиг.2;
на фиг.5 показана блок-схема, иллюстрирующая типичный блок преобразования сигнала вызова в парковочной станции в системе с подвижным роботом согласно другому варианту выполнения настоящего изобретения, изображенному на фиг.2;
на фиг.6 показана блок-схема, иллюстрирующая подвижного робота системы с подвижным роботом согласно варианту выполнения настоящего изобретения, изображенному на фиг.2;
на фиг.7 показана блок-схема, иллюстрирующая подвижного робота системы с подвижным роботом согласно другому варианту выполнения настоящего изобретения, изображенному на фиг.2;
на фиг.8 показан вариант выполнения телефонной клавиатуры, изображенной на фиг.1;
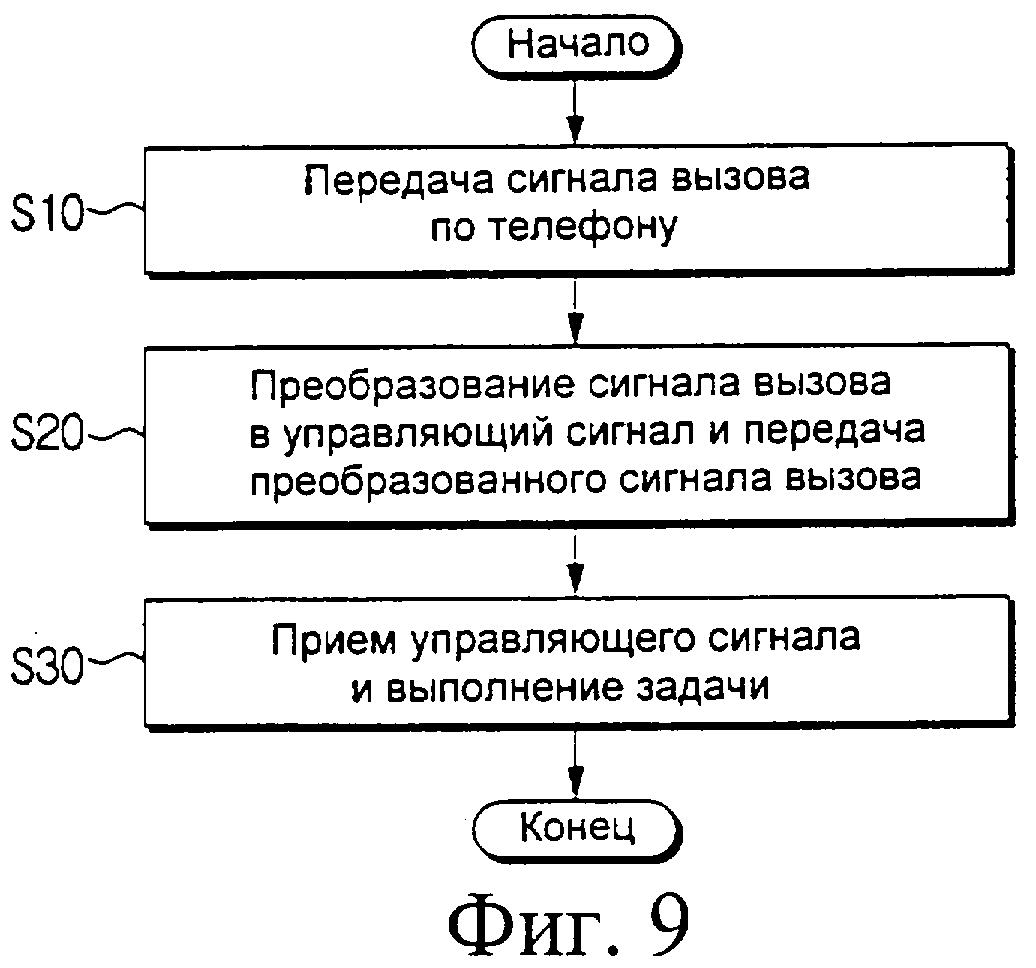
на фиг.9 показана последовательность операций, иллюстрирующая способ дистанционного управления подвижным роботом согласно варианту выполнения настоящего изобретения;
на фиг.10 показана последовательность операций, поясняющая типичные шаги, относящиеся к передаче управляющего сигнала в способе, иллюстрируемом на фиг.9;
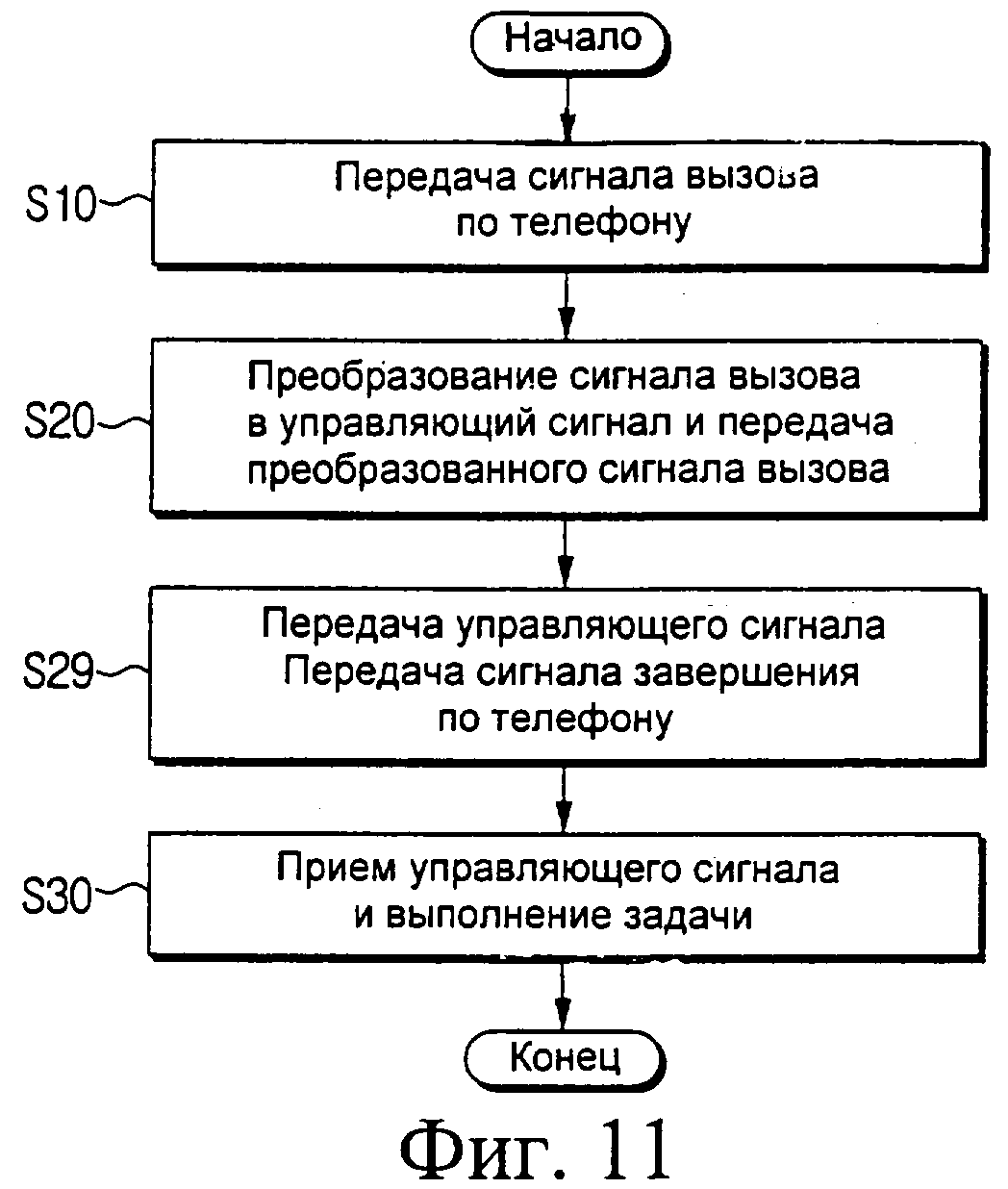
на фиг.11 показана последовательность операций, поясняющая способ дистанционного управления подвижным роботом согласно другому варианту выполнения настоящего изобретения;
на фиг.12 показана последовательность операций, поясняющая способ дистанционного управления подвижным роботом согласно еще одному варианту выполнения настоящего изобретения;
на фиг.13 показана последовательность операций, поясняющая типичные шаги, относящиеся к передаче сигнала завершения работы в способе, иллюстрируемом на фиг.12.
Подробное описание вариантов выполнения изобретения
Ниже со ссылками на сопровождающие чертежи описаны типичные варианты выполнения настоящего изобретения. В последующем описании в качестве неограничивающего изобретение примера описан робот-уборщик, включающий пылесос. Конечно, и другие роботы, известные специалистам в данной области техники, входят в объем настоящего изобретения.
Система 1 с подвижным роботом согласно первому варианту выполнения настоящего изобретения, изображенному на фиг.1 и 2, может включать парковочную станцию 10 и подвижный робот 60. Робот 60 может возвратиться к парковочной станции 10 и перейти в режим ожидания. Парковочная станция 10 может быть связана с телефонной линией 9 и может содержать блок 20 соединения вызова, блок 30 преобразования сигнала вызова и зарядный блок 40. Одним из признаков настоящего изобретения является дистанционное управление подвижным роботом 60 посредством телефонной линии 9. Телефонная линия 9 может быть связана с телефонами 3 и 3', например с проводным телефоном, портативным телефоном или сотовым телефоном, через поставщика 5 услуг связи. Если система дистанционного управления подвижным роботом 60 выполнена с использованием телефонной линии 9, то можно дистанционно управлять подвижным роботом 60 при относительно малых затратах, поскольку по существу все дома и офисы оборудованы такой телефонной линией 9.
Блок 20 соединения вызова может быть связан с телефонной линией 9, которая имеет телефонный номер и может направлять поступающий вызов в блок 30 преобразования сигнала вызова, если поступающий вызов является командой управления подвижным роботом 60 (этот вызов в дальнейшем именуется "вызовом управления роботом"). Поскольку имеющийся телефон 11 также может соединяться с телефонной линией 9, то поступающий вызов, содержащий голосовую информацию, и поступающий вызов для передачи сигнала вызова с целью управления подвижным роботом, - оба могут быть получены через телефонную линию 9. Во избежание ненужных вызовов по телефонной линии 9 может быть желательным определить, является ли поступающий вызов вызовом управления роботом с целью управления подвижным роботом 60.
Соответственно, в настоящем изобретении предусмотрена возможность определения типа поступающего вызова. На фиг.3 блок 20 соединения вызова содержит средство 21 оценки принятого вызова, средство 22 передачи вызова и вторую память 23.
Средство 21 оценки принятого вызова может быть сконфигурировано так, чтобы определять, является ли поступающий вызов, принятый через телефонную линию 9, вызовом управления роботом с использованием, например, заданного оценочного шаблона. Конечно настоящее изобретение охватывает и другие способы определения, известные специалистам в данной области техники.
Когда определено, что вызов является вызовом управления роботом, средство 21 оценки принятого вызова позволяет осуществить соединение вызова управления роботом, чтобы блок 30 преобразования сигнала вызова мог получить сигнал вызова. Кроме того, когда блок 30 преобразования сигнала вызова заканчивает прием сигнала вызова, средство 21 оценки принятого вызова может прервать вызов управления роботом.
При этом, если телефон прозвонил заранее заданное число раз или если после поступления входящего вызова истек заранее заданный отрезок времени, средство 21 оценки принятого вызова может сделать вывод, что входящий вызов - вызов управления роботом. Заранее заданный отрезок времени и желаемое количество звонков могут быть установлены произвольно. Например, можно установить желаемое количество звонков равным 10, а отрезок прошедшего времени равным 60 секундам. Средство 21 оценки принятого вызова может быть настроено на определение, является ли входящий вызов вызовом голосовой связи или вызовом управления роботом, с использованием шаблонов, отличающихся от используемых в вышеуказанных способах определения.
Может быть предпочтительно, чтобы средство 21 оценки принятого вызова дополнительно было способно определить, введен ли заранее заданный идентификационный номер после соединения вызова. Средство 21 оценки принятого вызова может также быть сконфигурировано с возможностью отключения любого вызова, который удовлетворяет вышеупомянутым критериям вызова управления роботом, но не является вызовом управления роботом. Может быть предпочтительно, чтобы такой идентификационный номер включал цифры, которые могут быть введены с использованием клавиатур телефона 3 или 3'.
Средство 22 передачи вызова может также быть сконфигурировано с возможностью позвонить по телефонной линии 9 на конкретный номер телефона, хранимый во второй памяти 23. Таким образом, после получения одного или большего величества сигналов вызова из блока 30 преобразования сигнала вызова средство 22 передачи вызова может сделать телефонный вызов по телефонному номеру, хранимому во второй памяти 23, и может передать сигнал вызова. После завершения передачи сигнала вызова средство 22 передачи вызова может прервать соединение. В результате пользователь может убедиться в передаче рабочей команды подвижному роботу 60.
Вторая память 23 может хранить телефонный номер, по которому может отправить вызов средство 22 передачи вызова. Как вариант, телефонный номер может храниться там, где удобно пользователю. Может быть предпочтительным, чтобы пользователь хранил телефонный номер во второй памяти 23, которая способна получить сообщение подтверждения из подвижного робота, если пользователь посылает рабочую команду подвижному роботу.
На фиг.4 блок 30 преобразования сигнала вызова может включать блок 31 ввода сигнала, средство 32 преобразования сигнала, средство 33 управления преобразованием, средство 34 передачи сигнала со стороны парковочной станции, средство 35 генерации сигнала и блок 36 вывода сигнала. Блок 31 ввода сигнала может быть связан со средством 21 оценки принятого вызова блока 20 соединения вызова. Если вызов соединен средством 21 оценки принятого вызова, блок 31 ввода сигнала может принять введенный сигнал вызова. Хотя могут иметься много типов сигналов, может оказаться предпочтительно использовать двухтональные многочастотные символы (DTMF). Символы DTMF позволяют посылать специфические сигналы (например, двенадцать сигналов) путем нажатия клавиш клавиатур 2 телефонов 3 или 3' (см. фиг.8). Если числовые клавиши (от 0 до 9) и клавиши * и # клавиатуры 2 телефона 3 или 3' запрограммированы на желаемые задачи, которые предстоит решить подвижному роботу 60 (то есть, задано взаимно-однозначное соответствие), то можно передать подвижному роботу 60 двенадцать типов задач с использованием телефона 3 или 3'. Например, можно назначить клавишу "1" команде для очистки всего здания, например дома, клавишу "2" - команде для очистки определенной комнаты, клавишу "3" - команде для остановки выполнения других задач, назначенных подвижному роботу 60, в процессе работы подвижного робота 60 по очистке.
Средство 32 преобразования сигналов способно преобразовывать сигнал, который может быть введен в блок 31 ввода сигнала, в управляющий сигнал, который может быть передан подвижному роботу 60 посредством средства 34 передачи сигнала со стороны парковочной станции. Например, если средство 34 передачи сигнала со стороны парковочной станции передает сигналы подвижному роботу 60 с использованием модуля инфракрасной (IR) связи, принятый сигнал вызова может быть преобразован в инфракрасный сигнал. В общем случае средство 32 преобразования сигнала преобразует полученный сигнал вызова в соответствующий сигнал в зависимости от типа полученного сигнала вызова.
Когда средство 32 преобразования сигнала завершает преобразование сигнала вызова, средство 33 управления преобразованием может передать сигнал в соответствующее средство 34 передачи сигнала со стороны парковочной станции, в результате чего средство 34 передачи сигнала может передать управляющий сигнал. Кроме того, если средство 34 передачи сигнала завершает передачу управляющего сигнала, средство 33 управления преобразованием может управлять средством 35 генерации сигнала, в результате чего средство 35 генерации сигнала может генерировать вызов, соответствующий сигналу завершения передачи.
Средство 35 генерации сигнала может генерировать сигнал вызова, который может быть передан через телефонную линию 9 по команде средства 33 управления преобразованием. Например, когда в качестве сигналов вызова используются символы DTMF, средство 35 генерации сигнала может генерировать символ DTMF. Сигнал вызова, генерируемый средством 35 генерации сигнала, может быть передан в средство 22 передачи вызова из блока 20 соединения вызова 20 через блок 36 вывода сигнала.
Средство 34 передачи сигнала со стороны парковочной станции может передать управляющий сигнал подвижному роботу 60 по команде средства 33 управления преобразованием. Для передачи управляющего сигнала средство 34 передачи сигнала со стороны парковочной станции может иметь антенну 34а со стороны парковочной станции. Средство 34 передачи сигнала со стороны парковочной станции может использовать модуль инфракрасной связи или модуль радиочастотной связи в зависимости от способа беспроводной связи между средством 34 передачи сигнала со стороны парковочной станции и подвижным роботом 60. В данном варианте выполнения настоящего изобретения может использоваться модуль инфракрасной связи. Поэтому средство 34 передачи сигнала со стороны парковочной станции может быть оборудовано модулем передачи инфракрасного сигнала, а средство 63 приема сигнала подвижного робота 60 может содержать модуль приема инфракрасного сигнала. Источник 37 питания может подавать питание в блок 30 преобразования сигнала вызова, включающий средство 33 управления преобразованием.
Другой вариант выполнения блока преобразования сигнала вызова согласно настоящему изобретению показан на фиг.5. Согласно данному варианту выполнения настоящего изобретения блок 30' преобразования сигнала вызова может дополнительно включать средство 38 приема сигнала со стороны парковочной станции вместо вышеупомянутого блока 30 преобразования сигнала вызова или в дополнение к нему. Средство 38 приема сигнала со стороны парковочной станции может принимать сигнал, переданный из подвижного робота 60' (см. фиг.7), который может иметь средство 69 передачи сигнала со стороны робота (см. фиг.7). В то же время, может быть предпочтительно, чтобы средство 38 приема сигнала со стороны парковочной станции использовало модуль связи, аналогичный средству 34 передачи сигнала со стороны парковочной станции. Например, когда в средстве 34 передачи сигнала со стороны парковочной станции используется модуль передачи инфракрасного сигнала, может быть предпочтительно, чтобы в средстве 38 приема сигнала со стороны парковочной станции также использовался модуль приема инфракрасного сигнала. Кроме того, средство 33' управления преобразованием может управлять средством 35 генерации сигнала так, чтобы сигнал вызова, соответствующий сигналу, полученному из средства 38 приема сигнала со стороны парковочной станции, можно было сгенерировать и передать в блок 20 соединения вызова.
Зарядный блок 40 может заряжать аккумулятор 66 (см. фиг.6), установленный в подвижном роботе 60, с использованием источника питания. С этой целью зарядный блок 40 может быть снабжен зарядным терминалом 41. Кроме того, если желательно, парковочная станция 10 может содержать датчик 51 со стороны парковочной станции и блок 50 подачи воды.
Датчик 51 со стороны парковочной станции может использовать датчик, соответствующий датчику 64 обнаружения парковочной станции (см. фиг.6), который может определять положение парковочной станции 10. Например, если средство передачи сигнала и средство приема сигнала, включающие ультразвуковой датчик, используются в качестве датчика 51 со стороны парковочной станции и датчика 64 обнаружения парковочной станции соответственно, то подвижный робот 60 может определять положение парковочной станции 10. Кроме того, если подвижный робот 60 может определять положение парковочной станции 10 с использованием камеры на приборах с зарядовой связью (ПЗС) (не показана), необходимости в датчике 51 со стороны парковочной станции может и не быть.
Блок 50 подачи воды может быть предназначен для подачи воды, которая может потребоваться, если подвижный блок 60' содержит увлажнитель 71 (см. фиг.7) или способен выполнять влажную уборку.
Кроме того, в парковочную станцию 10 может быть встроен телефон, соединенный с телефонной линией 9 (не показана). Телефонная линия 9 может быть проводной, беспроводной или сотовой, а также иметь другую конфигурацию, известную специалистам в данной области техники.
Как отмечено выше, подвижный робот 60 в данном примере выполнен с функциями уборки. Однако настоящее изобретение охватывает и других роботов, имеющих другие функции, включая многофункциональных роботов.
Пример подвижного робота 60 показан на фиг.6. Показанный на фиг.6 подвижный робот 60 может включать пылевсасывающее средство 61, приводное средство 62, средство 63 приема сигнала со стороны робота, средство 65 определения местоположения, датчик 64 обнаружения парковочной станции, контроллер 68 робота и перезаряжаемый аккумулятор 66.
Пылевсасывающее средство 61 производит уборку путем всасывания мусора с очищаемой поверхности, например с пола, по которому перемещается подвижный робот 60. Пылевсасывающее средство 61 может включать источник вакуума, создающий всасывающую силу, и элемент для сбора пыли, предназначенный для отделения и сбора всосанного мусора, например земли.
Приводное средство 62 обеспечивает подвижность подвижного робота 60 во всех направлениях и обычно включает несколько колес и несколько двигателей, приводящих эти колеса в движение.
Средство 63 приема сигнала со стороны робота может принимать управляющий сигнал, передаваемый из блока 30 преобразования сигнала вызова в парковочной станции 10, и содержит антенну 63а со стороны робота. Средство 63 приема сигнала со стороны робота может использовать модуль связи, соответствующий средству 34 передачи сигнала со стороны парковочной станции в блоке 30 преобразования сигнала вызова. Например, если в средстве 34 передачи сигнала со стороны парковочной станции в блоке 30 преобразования сигнала вызова используется модуль передачи инфракрасного сигнала, в средстве 63 приема сигнала со стороны робота может использоваться модуль приема инфракрасного сигнала. Средство 65 определения местоположения может обнаруживать текущее положение подвижного робота 60 с использованием ПЗС-камеры или аналогичного устройства. Датчик 64 обнаружения парковочной станции может обнаруживать положение парковочной станции 10 путем взаимодействия с датчиком 51 со стороны парковочной станции, имеющимся в парковочной станции 10.
Перезаряжаемый аккумулятор 66 снабжает энергией подвижного робота 60. Если перезаряжаемый аккумулятор 66 разряжается, зарядный блок 40 парковочной станции 10 может произвести зарядку перезаряжаемого аккумулятора 66.
Контроллер 68 робота способен определить содержание управляющего сигнала, полученного средством 63 приема сигнала со стороны робота, и способен обеспечить выполнение задачи, соответствующей полученному управляющему сигналу. В первой памяти 67 может храниться много программ, чтобы контроллер 68 робота мог выполнить специфическую задачу согласно полученному сигналу. Задачи, выполняемые подвижным роботом 60, могут быть по желанию записаны пользователем в первую память 67. При использовании символов DTMF можно разместить широкий спектр программ среди рабочих программ, записанных в первой памяти 67 подвижного робота 60.
На фиг.7 показан подвижный робот 60' согласно другому варианту выполнения настоящего изобретения. Подвижный робот 60' может быть идентичным или аналогичным вышеописанному подвижному роботу 60, за исключением того, что имеется средство 69 передачи сигнала со стороны робота и средство 71 увлажнения. После того как подвижный робот 60' выполнит поставленную задачу согласно управляющему сигналу, полученному средством 63 приема сигнала со стороны робота, средство 69 передачи сигнала со стороны робота способно передать сигнал завершения работы в средство 38 приема сигнала со стороны парковочной станции в парковочной станции 10. Поэтому средство 69 передачи сигнала со стороны робота может использовать модуль связи, соответствующий средству 38 приема сигнала со стороны парковочной станции. Средство 71 увлажнения способно производить увлажнение для повышения влажности в закрытом помещении, и при потреблении воды средство 71 увлажнения может снабжаться водой из блока 50 подачи воды в парковочной станции 10.
Ниже со ссылками на фиг.1-8 описана работа вышеописанной системы 1 с подвижным роботом. Когда пользователь удален от подвижного робота (например, пользователь не находится в комнате или в здании, где расположен подвижный робот 60), пользователь может позвонить в то место, где расположена система с подвижным роботом. При этом пользователь может сделать вызов с помощью портативного телефона 3' или проводного/беспроводного телефона 3 (или с использованием других телефонов, известных специалистам в данной области техники). Если вызов привел к соединению, пользователь вводит идентификационный номер, используя клавиатуру 2 в телефоне 3' или 3. Если ввод идентификационного номера завершен, пользователь может нажать клавишу 2а "*" или клавишу 2b "#" клавиатуры 2 для подтверждения ввода идентификационного номера. После этого пользователь может нажать цифровую клавишу, соответствующую задаче, которую пользователь намерен поставить перед подвижным роботом 60.
При вызове со стороны пользователя средство 21 оценки принятого вызова в блоке 20 соединения вызова, который может иметься в парковочной станции 10, определяет, является ли входящий вызов вызовом управления роботом. При этом, если за время, пока телефон прозвонил заданное количество раз, вызов распознан как вызов управления роботом, средство 21 оценки принятого вызова может осуществить соединение вызова. После этого средство 21 оценки принятого вызова может подтвердить ввод идентификационного номера. Если идентификационный номер не был введен, средство 21 оценки принятого вызова может прервать вызов. Если идентификационный номер был введен, средство 21 оценки принятого вызова может передать сигнал вызова в блок 30 преобразования сигнала вызова.
Сигнал вызова, переданный в блок 30 преобразования сигнала вызова, может быть передан в средство 32 преобразования сигнала через блок 31 ввода сигнала. Средство 32 преобразования сигнала может преобразовать сигнал вызова в управляющий сигнал, который может быть передан средством 34 передачи сигнала. Например, если средство 34 передачи сигнала использует модуль инфракрасной связи, средство 32 преобразования сигнала может преобразовать сигнал вызова в соответствующий инфракрасный сигнал.
Если средство 32 преобразования сигнала завершает преобразование сигнала вызова в соответствующий управляющий сигнал, средство 33 управления преобразованием может передать преобразованный управляющий сигнал подвижному роботу 60 с использованием средства 34 передачи сигнала со стороны парковочной станции. Если управляющий сигнал передан, средство 63 приема сигнала со стороны робота в подвижном роботе 60 может принять и передать управляющий сигнал в контроллер 68 робота. Контроллер 68 робота может получить доступ к специальной программе, которая может храниться в первой памяти 67, по сигналу, полученному из средства 63 приема сигнала со стороны робота, и обеспечивает выполнение требуемой задачи. Например, если управляющий сигнал, полученный средством 63 приема сигнала со стороны робота, представляет собой команду, соответствующую клавише "1" телефонной клавиатуры 2, контроллер 68 робота может получить доступ к программе, соответствующей клавише "1" и может обеспечить выполнение требуемой задачи.
Если средство 34 передачи сигнала со стороны парковочной станции заканчивает передачу управляющего сигнала, средство 33 управления преобразованием может управлять средством 35 генерации сигнала с целью генерации сигнала вызова для сигнала завершения передачи, который указывает, что управляющий сигнал был передан подвижному роботу 60. После этого сигнал вызова для сигнала завершения передачи может быть передан в средство 22 передачи вызова из блока 20 соединения вызова через блок 36 вывода сигнала.
Затем средство 22 передачи вызова блока 20 соединения вызова может сделать телефонный вызов по телефонному номеру, хранящемуся во второй памяти 23. Если вызов привел к соединению, средство 22 передачи вызова может передать сигнал вызова, полученный из блока 36 вывода сигнала, и разорвать соединение после его завершения.
Если подвижный робот 60' снабжен средством 69 передачи сигнала со стороны робота, как показано на фиг.7, можно уведомить пользователя о выполнении задачи. Таким образом, если выполнение задачи закончено, контроллер 68' робота может передать сигнал завершения работы в средство 38 приема сигнала со стороны парковочной станции в парковочной станции 10 через средство 69 передачи сигнала со стороны робота. Если средство 38 приема сигнала со стороны парковочной станции принимает сигнал завершения работы, средство 33' управления преобразованием может управлять средством 35 генерации сигнала с целью генерации сигнала вызова, соответствующего принятому сигналу завершения работы. Затем средство 33' управления преобразованием может передать сгенерированный сигнал вызова в средство 22 передачи вызова из блока 20 соединения вызова через блок 36 вывода сигнала. Затем средство 22 передачи вызова может сделать телефонный вызов по телефонному номеру, который хранится во второй памяти 23, и передать введенный сигнал вызова на этот телефонный номер. Пользователь может убедиться, что подвижный робот 60 закончил требуемую работу, путем телефонного вызова, выполненного средством 20 передачи вызова.
Ниже, со ссылками на фиг.1 и фиг.9-13, описан способ дистанционного управления подвижным роботом, который является вторым аспектом настоящего изобретения и может быть применен к вышеописанной системе 1 с подвижным роботом. Способ дистанционного управления подвижным роботом в целом подразделяется на три шага. На первом шаге (S10) пользователь делает телефонный вызов в парковочную станцию 10 с использованием телефона 3 или 3', передавая, таким образом, рабочую команду. Таким образом, первым шагом является шаг передачи сигнала вызова, на котором пользователь передает сигнал вызова, соответствующий рабочей команде, по телефону 3 или 3'. На втором шаге (S20) парковочная станция 10 принимает сигнал вызова по телефону и передает сигнал вызова подвижному роботу 60. Второй шаг может быть шагом передачи управляющего сигнала, на котором парковочная станция 10 принимает и преобразует сигнал вызова в управляющий сигнал и передает этот управляющий сигнал подвижному роботу 60. Третий шаг (S30) предназначен для выполнения задачи, и на этом шаге подвижный робот 60 принимает управляющий сигнал и выполняет задачу, соответствующую принятому управляющему сигналу.
На шаге (S10) передачи сигнала вызова пользователь делает телефонный звонок в парковочную станцию 10 и может ввести идентификационный номер и номер, соответствующий задаче, которая будет поставлена перед подвижным роботом, с использованием клавиатуры 2 телефона 3 или 3' (см. фиг.8) после установления соединения. Если номера введены, определенный сигнал вызова может быть передан в парковочную станцию 10 по телефонной линии 9. При этом, если используются символы DTMF, можно передать рабочую команду с использованием цифр и символов клавиатуры 2.
На шаге (S20) передачи управляющего сигнала парковочная станция 10 может сначала определить (S21), действительно ли поступающий вызов является вызовом управления роботом. Если он является вызовом управления роботом, парковочная станция 10 может осуществить (S22) соединение вызова и определить (S23), передан ли идентификационный номер. Если идентификационный номер имеется, парковочная станция 10 может принять (S24) сигнал вызова, обработать вызов и разорвать (S25) соединение. После этого парковочная станция 10 может преобразовать (S26) полученный сигнал вызова в управляющий сигнал и передать (S27) преобразованный управляющий сигнал подвижному роботу 60. На шаге (S30) выполнения работы подвижный робот 60 может принять управляющий сигнал и выполнить заданную задачу согласно принятому управляющему сигналу.
При этом, как показано на фиг.11, после того, как на втором шаге (S20) передача управляющего сигнала подвижному роботу 60 парковочной станцией 10 завершена, способ согласно изобретению может дополнительно включать шаг, на котором парковочная станция 10 уведомляет пользователя об этом состоянии по телефону, то есть шаг (S29) передачи по телефону сигнала, соответствующего завершению передачи управляющего сигнала.
Кроме того, если подвижный робот 60' способен передать сигнал завершения работы в парковочную станцию 10, то есть, если подвижный робот 60' оборудован средством 69 передачи сигнала со стороны робота, способ согласно изобретению может дополнительно включать шаг уведомления пользователя о завершении работы. То есть, как показано на фиг.12, предлагаемый способ может дополнительно включать шаг (S40), на котором подвижный робот 60' передает сигнал завершения работы в парковочную станцию 10 после того, как этот подвижный робот 60' закончил работу согласно принятой управляющей команде, и шаг (S50), на котором парковочная станция 10 делает телефонный вызов пользователю и передает сигнал вызова, соответствующий сигналу завершения работы.
Парковочная станция 10 принимает (S51) от подвижного робота 60' сигнал завершения работы. Поскольку этот сигнал завершения работы является сигналом, который может быть передан между подвижным роботом 60' и парковочной станцией 10 беспроводным способом, парковочная станция 10 может преобразовать (S52) сигнал завершения работы в сигнал вызова, который может быть передан по телефонной линии. После этого парковочная станция 10 может сделать (S53) телефонный вызов по некоторому номеру. Этот телефонный номер может быть записан в память заранее. Если вызов привел к соединению, парковочная станция 10 может передать (S54) по телефону преобразованный сигнал вызова, соответствующий сигналу завершения работы. Если передача сигнала вызова закончена, парковочная станция 10 может обработать завершение вызова и может разорвать (S55) соединение.
Как описано выше, поскольку в системе с подвижным роботом и в способе дистанционного управления этим роботом подвижным роботом можно управлять дистанционно с использованием телефонной линии, можно осуществить дистанционное управление подвижным роботом из любого места, откуда можно сделать телефонный вызов в парковочную станцию. Кроме того, поскольку предлагаемые система с подвижным роботом и способ дистанционного управления этим роботом могут использовать имеющийся телефон, можно осуществить дистанционное управление подвижным роботом с малыми затратами.
Хотя для иллюстрации принципов настоящего изобретения были представлены и описаны репрезентативные варианты выполнения настоящего изобретения, оно не ограничено этими специфическими вариантами его выполнения. Понятно, что специалисты в данной области техники могут сделать различные изменения и модификации без отхода от сути и объема настоящего изобретения, определяемого формулой изобретения. Поэтому следует считать, что такие изменения, модификации и эквиваленты находятся в объеме настоящего изобретения.
Реферат
Изобретение относится к системам управления подвижными роботами. Технический результат заключается в повышении эффективности управления роботом. Система содержит подвижный робот, станцию для парковки подвижного робота, блок соединения вызова, расположенный в указанной парковочной станции и способный принимать телефонный вызов, а также определять, является ли принятый вызов вызовом управления роботом, и блок преобразования сигнала вызова, способный преобразовывать телефонный вызов в управляющий сигнал и передавать управляющий сигнал подвижному роботу. 2 н. и 15 з.п. ф-лы, 13 ил.

Формула
Документы, цитированные в отчёте о поиске
Система с мобильным роботом, выполненная с использованием высокочастотного модуля
Комментарии