Электрическое устройство для катания на роликах и электрическое балансирное средство передвижения - RU2703783C1
Код документа: RU2703783C1
Чертежи

















Описание
Приоритет данной заявки заявляется по заявке на патент Китая №201710626491.4, озаглавленной «УСТРОЙСТВО ДЛЯ КАТАНИЯ НА РОЛИКАХ» и поданной 27 июля 2017 года, и заявке на патент Китая №201710625533.2, озаглавленной «ЭЛЕКТРИЧЕСКОЕ БАЛАНСИРНОЕ СРЕДСТВО ПЕРЕДВИЖЕНИЯ» и поданной 27 июля 2017 года, полное содержание которых включено в данный документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Варианты выполнения данного изобретения относятся к области катания на роликах или приспособлениям для передвижения, в частности к устройству для катания на роликах и электрическому балансирному средству передвижения.
ПРЕДПОСЫЛКИ
Ножные опоры для катания на роликах, применяемые в качестве средства развлечения или средства передвижения, преимущественно включают скоростные опоры и управляемые опоры. Тем не менее, опоры для катания на роликах, относящиеся к указанным двум типам, имеют по существу одинаковую конструкцию, а именно опоры обоих типов содержат корпус, держатель колеса, установленный на подошве ножной опоры, и роликовые колеса. Различие между опорами данных двух типов заключается в том, что количество, размер и расположение роликовых колес отличается в зависимости от назначения. В процессе использования катание осуществляется под действием мускульной силы, прикладываемой пользователем, такой как сила, возникающая при нажатии на педали. Возможный недостаток заключается в том, что в периоды продолжительного использования человек может ощущать физическую усталость. Более того, во время катания на роликах пользователь должен оставаться на опорах и сохранять равновесие, что является довольно трудновыполнимым для обычного пользователя и в конечном итоге приводит к неприятным ощущениям при использовании опор для катания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Ввиду вышеизложенного, одна из технических задач, решаемых с помощью вариантов выполнения данного изобретения, заключается в создании устройства для катания на роликах и электрического балансирного средства передвижения, обеспечивающих устранение или уменьшение вышеуказанных технических недостатков известного уровня техники.
Варианты выполнения данного изобретения относятся к устройству для катания на роликах, содержащему: платформу для ног, один или более элементов, контактирующих с землей, первый датчик, один или более движущих элементов и первый контроллер. Платформа для ног связана с первым датчиком и указанными одним или более элементами, контактирующими с землей и связанными с движущим элементом, а первый контроллер связан с первым датчиком и движущим элементом. Платформа для ног может быть выполнена с возможностью стояния на ней на одной ноге и с возможностью наклона вперед или назад при стоянии на одной ноге. Указанные один или более элементов, контактирующих с землей, выполнены с возможностью работы вследствие активации движущего элемента. Первый датчик выполнен с возможностью считывания положения пользователя на платформе для ног. Указанные один или более движущих элементов выполнены с возможностью генерации выходного сигнала для управления работой элементов, контактирующих с землей, и поддержания всего устройства для катания на роликах в равновесии. Первый контроллер выполнен с возможностью управления генерацией указанного выходного сигнала на основании положения пользователя.
Варианты выполнения данного изобретения также относятся к электрическому балансирному средству передвижения, содержащему устройство для катания на роликах, выполненное согласно одному или более вариантам выполнения данного изобретения. При этом между двумя смежными устройствами для катания на роликах расположен соединитель, обеспечивающий сборку указанных двух устройств в единый элемент.
Как следует из вышеописанных технических решений, в вариантах выполнения данного изобретения платформа для ног связана с первым датчиком и элементами, контактирующими с землей и связанными с движущим элементом, а первый контроллер связан с первым датчиком и движущим элементом, причем платформа для ног может быть выполнена с возможностью стояния на ней на одной ноге и с возможностью наклона вперед или назад при стоянии на одной ноге, при этом элементы, контактирующие с землей, выполнены с возможностью работы вследствие активации движущего элемента, первый датчик выполнен с возможностью считывания положения пользователя на платформе для ног, движущий элемент выполнен с возможностью генерации выходного сигнала для управления работой элементов, контактирующих с землей, и поддержания всего устройства для катания на роликах в равновесии, а первый контроллер выполнен с возможностью управления генерацией указанного выходного сигнала на основании положения пользователя. Более того, с помощью электрического балансирного средства передвижения, образованного при помощи соединителя из по меньшей мере двух устройств для катания на роликах, данное изобретение обеспечивает исключение возникновения физической усталости в результате катания на роликах, осуществляемого под действием мускульной силы человека. Кроме того, от пользователя не требуется высоких профессиональных навыков, поскольку устройство может самостоятельно поддерживать равновесие в процессе катания, так что пользователь испытывает более комфортные ощущения. Другими словами, данное изобретение в целом обеспечивает устройство для катания на роликах и электрическое балансирное средство передвижения, обеспечивающие более комфортные ощущения при использовании.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более точной иллюстрации технических решений, используемых в вариантах выполнения данного изобретения или в уровне техники, ниже приведено краткое описание чертежей, используемых при описании вариантов выполнения или уровня техники. Очевидно, что нижеописанные чертежи представляют лишь некоторые варианты выполнения данного изобретения и что на основании этих чертежей специалистами могут быть выполнены другие чертежи.
Фиг. 1 изображает упрощенный схематический вид конструкции устройства для катания на роликах согласно первому варианту выполнения данного изобретения,
фиг. 2 изображает упрощенный схематический вид конструкции устройства для катания на роликах согласно второму варианту выполнения данного изобретения,
фиг. 3а и 3b изображают два упрощенных схематических вида конструкции устройства для катания на роликах согласно третьему варианту выполнения данного изобретения,
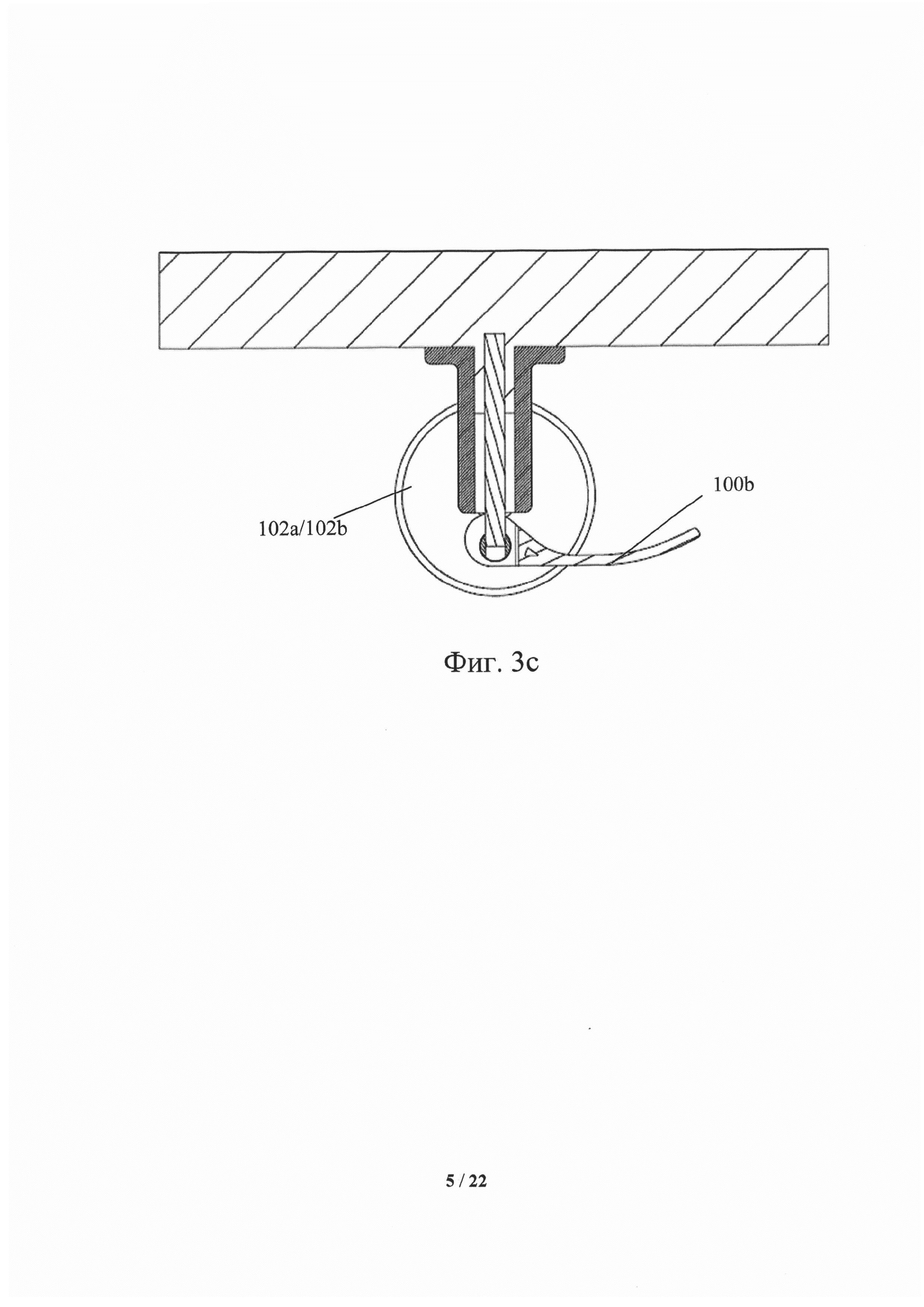
фиг. 3с изображает схематический вид альтернативного варианта фиксирующего основания, используемого в третьем варианте выполнения данного изобретения,
фиг. 4 изображает упрощенный схематический вид устройства для катания на роликах согласно четвертому варианту выполнения данного изобретения,
фиг. 5 изображает схематический вид устройства для катания на роликах согласно пятому варианту выполнения данного изобретения,
фиг. 6 изображает схематический вид устройства для катания на роликах согласно шестому варианту выполнения данного изобретения,
фиг. 7а и 7b изображают два схематических вида устройства для катания на роликах согласно седьмому варианту выполнения данного изобретения,
фиг. 8 изображает местный схематический вид устройства для катания на роликах согласно восьмому варианту выполнения данного изобретения,
фиг. 9 изображает схематический вид, иллюстрирующий принцип управления устройством для катания на роликах согласно девятому варианту выполнения данного изобретения,
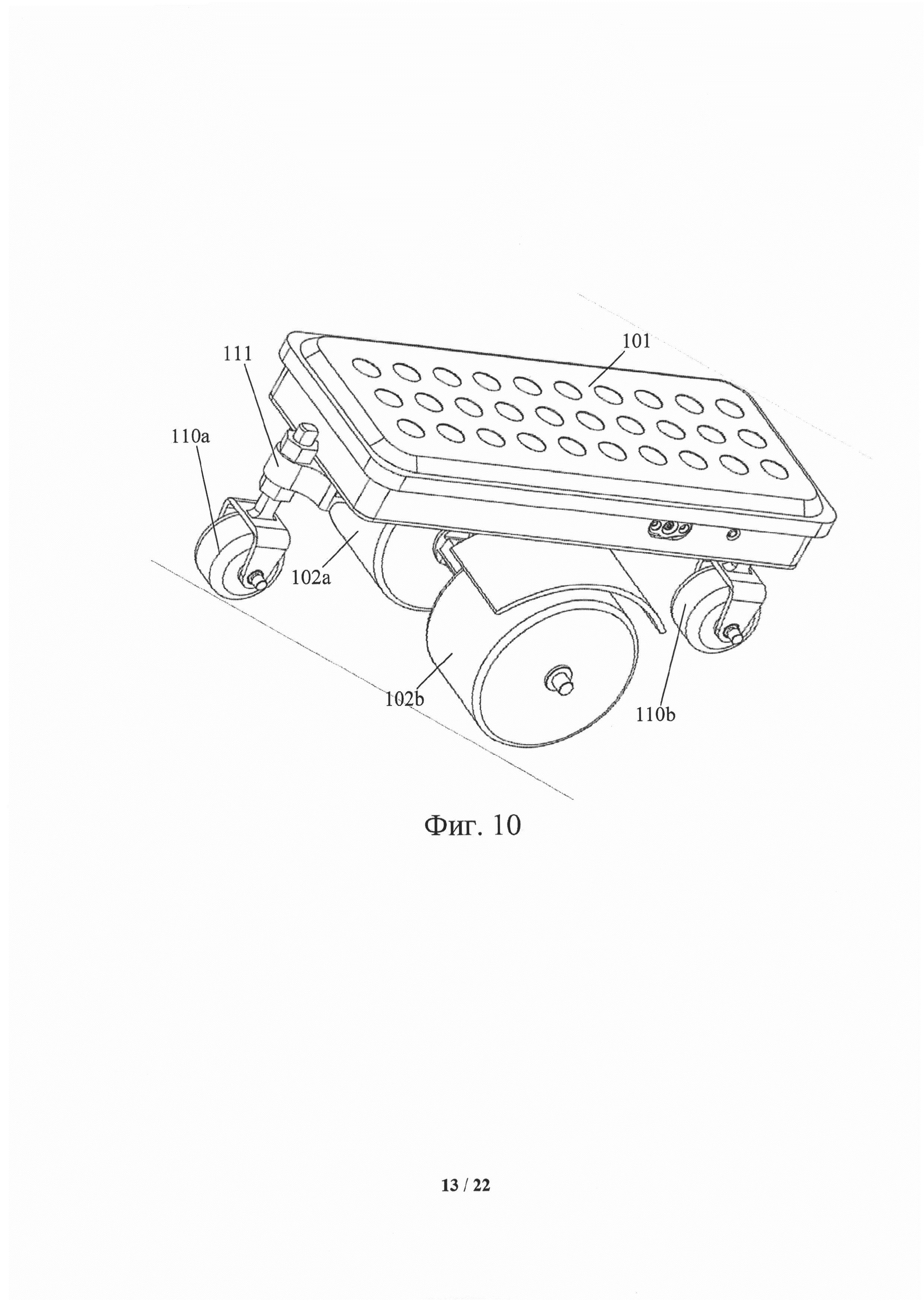
фиг. 10 изображает схему расположения вспомогательных элементов, контактирующих с землей, согласно десятому варианту выполнения данного изобретения,
фиг. 11 изображает блок-схему способа рулевого управления согласно одиннадцатому варианту выполнения данного изобретения,
фиг. 12-16 изображают схематические виды электрического балансирного средства передвижения согласно двенадцатому, тринадцатому, четырнадцатому, пятнадцатому и шестнадцатому вариантам выполнения данного изобретения,
фиг. 17 изображает схематический вид фрагментов обоих концов соединителя согласно семнадцатому варианту выполнения данного изобретения,
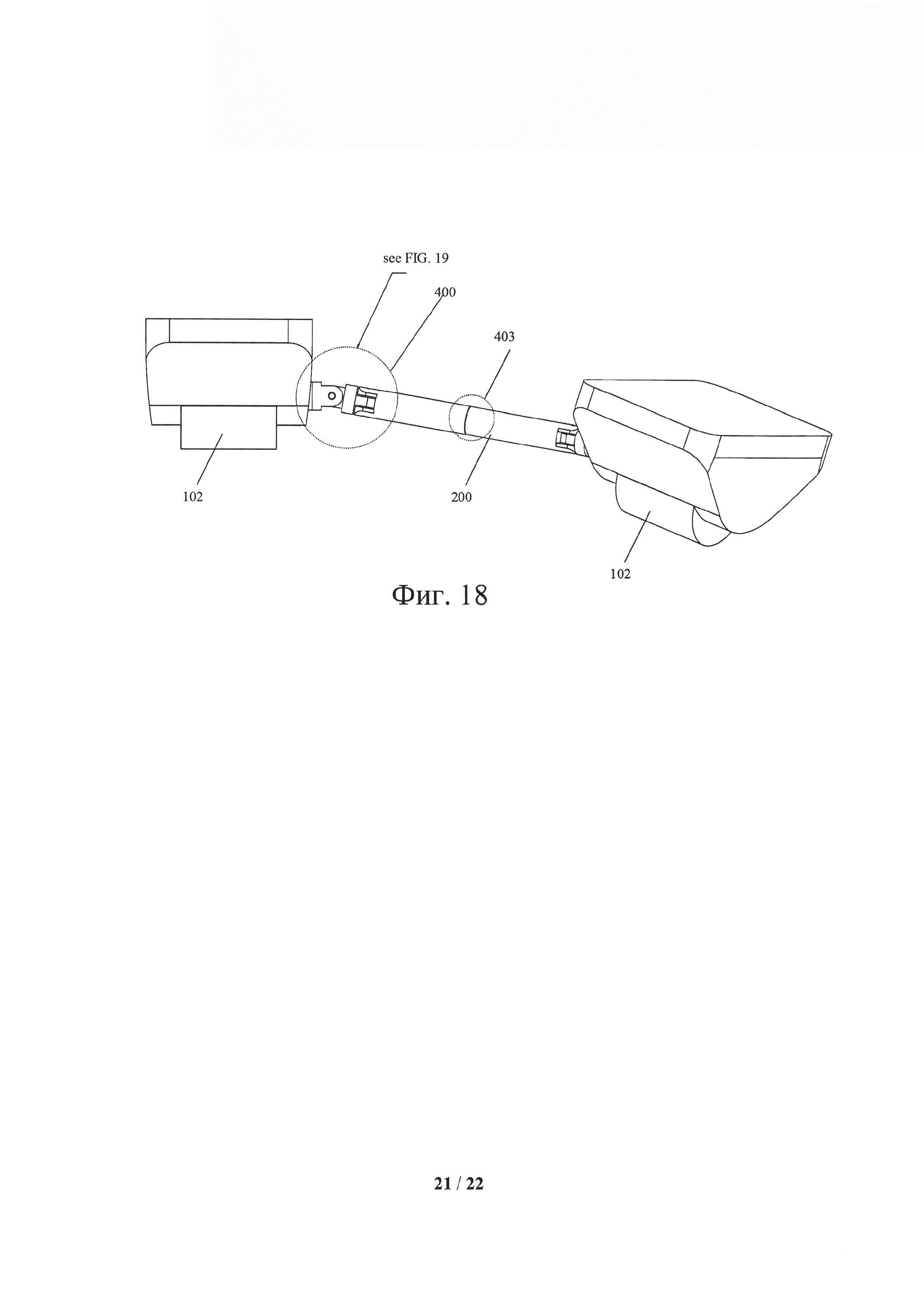
фиг. 18 изображает схематический вид электрического балансирного средства передвижения согласно восемнадцатому варианту выполнения данного изобретения,
фиг. 19 изображает схематический вид фрагментов обоих концов соединителя согласно девятнадцатому варианту выполнения данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Разумеется, с помощью одного из технических решений, используемых в вариантах выполнения данного изобретения, необязательно достигаются все вышеуказанные преимущества.
Для лучшего понимания специалистами технических решений, используемых в вариантах выполнения данного изобретения, ниже приведено точное и полное описание указанных решений в соответствии с чертежами, изображающими варианты выполнения данного изобретения. Очевидно, что описанные варианты выполнения представляют лишь часть вариантов выполнения данного изобретения, а не все варианты выполнения. При этом все другие варианты выполнения, созданные специалистами в данной области техники на основании вариантов выполнения данного изобретения, следует считать находящимися в рамках объема правовой охраны вариантов выполнения данного изобретения.
Ниже приведено более подробное описание вариантов выполнения данного изобретения в соответствии с изображающими их чертежами.
Согласно вышеописанным техническим решениям в вариантах выполнения данного изобретения платформа для ног связана с первым датчиком и одним или более элементами, контактирующими с землей и связанными с движущим элементом, причем с первым датчиком и движущим элементом связан первый контроллер, при этом платформа для ног может быть выполнена с возможностью стояния на ней на одной ноге и с возможностью наклона вперед или назад при стоянии на одной ноге, указанные один или более элементов, контактирующих с землей, выполнены с возможностью работы вследствие активации движущего элемента, первый датчик выполнен с возможностью считывания положения пользователя на платформе для ног, указанные один или более движущих элементов выполнены с возможностью генерации выходного сигнала для управления работой элементов, контактирующих с землей, и поддержания всего устройства для катания на роликах в равновесии, а первый контроллер выполнен с возможностью управления генерацией указанного выходного сигнала на основании положения пользователя. Более того, с помощью электрического балансирного средства передвижения, образованного из по меньшей мере двух устройств для катания на роликах при помощи соединителя, данное изобретение обеспечивает исключение возникновения физической усталости в результате катания на роликах, осуществляемого под действием мускульной силы человека. Кроме того, от пользователя не требуется высоких профессиональных навыков, поскольку устройство может самостоятельно поддерживать равновесие в процессе катания на роликах, так что пользователь испытывает более комфортные ощущения. Другими словами, данное изобретение в целом обеспечивает устройство для катания на роликах и электрическое балансирное средство передвижения, обеспечивающие более комфортные ощущения при использовании.
В нижеприведенных вариантах выполнения данного изобретения первый датчик выполнен, в частности, с возможностью считывания положения пользователя на платформе для ног и генерации измерительных данных о наклоне, а первый контроллер выполнен, в частности, с возможностью определения текущего угла наклона платформы для ног на основании указанных измерительных данных о наклоне. Первый контроллер обеспечивает управление выходным сигналом движущего элемента на основании ожидаемого угла наклона и текущего угла наклона платформы для ног, например на основании разности значений ожидаемого угла наклона и текущего угла наклона платформы.
Вышеописанное устройство для катания на роликах выполнено в виде специальных ножных опор для катания на роликах и описано ниже в качестве примера. При этом следует отметить, что устройство для катания на роликах может быть выполнено не только в виде ножных опор, но и в виде изделия, подходящего для катания на роликах при помощи рук, или в виде любого изделия, подходящего для катания на роликах людей с ограниченными возможностями.
Кроме того, в нижеприведенных вариантах выполнения примером типичных элементов, контактирующих с землей, являются колеса, при этом указанные элементы катятся вследствие активации движущего элемента. При регулировании рулевого управления скорости вращения колес регулируются для создания разности скоростей вращения, необходимой для регулирования рулевого управления.
Однако в других вариантах выполнения элементы, контактирующие с землей, не ограничены колесами и могут представлять собой любую другую конструкцию, подходящую для физического контакта с землей. В случае катания на коньках или лыжах элементы, контактирующие с землей, могут представлять собой конструкции, имеющие почти плоскую форму, при этом указанные элементы скользят вследствие активации движущего элемента. Кроме того, колеса не обязательно имеют круглую форму. Если колеса не являются круглыми, контактная поверхность может быть адаптивно изменена для достижения приемлемого физического контакта между указанной поверхностью и колесами.
Кроме того, в нижеприведенных вариантах выполнения первый датчик может представлять собой гироскоп, но без ограничения этим, при условии, что он способен считывать положение пользователя на платформе для ног и генерировать измерительные данные о наклоне. В нижеописанных вариантах выполнения первый датчик не показан.
Более того, в нижеприведенных вариантах выполнения движущий элемент может представлять собой двигатель, но без ограничения этим, при условии, что он способен приводить в действие элементы, контактирующие с землей, и может быть реализован в соответствии с конкретными вариантами применения. В случае, когда движущий элемент является двигателем, выходной сигнал указанного элемента представляет собой крутящий момент на его выходе.
ПЕРВЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ (один элемент, контактирующий с землей)
На фиг. 1 изображен упрощенный схематический вид конструкции устройства для катания на роликах согласно первому варианту выполнения данного изобретения. Как показано на фиг. 1, в случае, когда устройство для катания на роликах выполнено в виде ножных опор для катания на роликах, указанные опоры, в частности, содержат вышеописанную платформу 101 для ног, элементы 102, контактирующие с землей, двигатель (не показан на фиг. 1) и первый контроллер (не показан на фиг. 1). Платформа для ног обеспечивает возможность стояния пользователя на ней на одной ноге, а количество элементов 102, контактирующих с землей, равно одному, то есть при помощи указанной опоры пользователь контактирует с землей только в одной точке контакта. Соответственно, количество движущих элементов равно одному.
В частности, движущий элемент может быть непосредственно встроен в ступицу элемента 102 так, что конструкция опор для катания на роликах в целом является компактной.
Следует отметить, что движущий элемент может быть не встроен в ступицу элемента 102, а расположен, например, непосредственно под платформой 101 при помощи фиксирующего основания или других аналогичных конструкций.
ВТОРОЙ ВАРИАНТ ВЫПОЛНЕНИЯ (два элемента 102а и 102b, контактирующих с землей, отнесены друг от друга на небольшое расстояние)
На фиг. 2 изображен упрощенный схематический вид конструкции устройства для катания на роликах согласно второму варианту выполнения данного изобретения. Как показано на фиг. 2, данный вариант выполнения отличается от первого варианта выполнения количеством элементов, контактирующих с землей, то есть содержит два элемента 102а и 102b, контактирующих с землей. Между элементами 102а, 102b имеется небольшое поперечное расстояние для обеспечения возможности их расположения вблизи центра платформы 101 для ног, так что при помощи опоры для катания на роликах пользователь контактирует с землей в двух точках контакта, вследствие чего облегчается использование опор.
В данном варианте выполнения передаточный вал движущего элемента расположен поперечным образом, то есть перпендикулярно направлению движения опор для катания на роликах, при этом элементы 102а, 102b расположены соответственно на двух концах указанного вала. Движущий элемент встроен в ступицу элементов 102, контактирующих с землей, непосредственно соединен с элементом 102а через передаточный вал и связан с элементом 102b, не имеющим встроенного движущего элемента. Другими словами, во время движения опор для катания на роликах элемент 102а, снабженный движущим элементом, работает как ведущее колесо, а элемент 102b, не имеющий движущего элемента, работает как ведомое колесо, которое приводится во вращение с помощью ведущего колеса.
Следует отметить, что в других вариантах выполнения каждый из элементов 102а, 102b может быть выполнен с двигателем, так что работой каждого из указанных элементов можно управлять по отдельности.
ТРЕТИЙ ВАРИАНТ ВЫПОЛНЕНИЯ (два элемента 102а и 102b, контактирующие с землей, отнесены друг от друга на большое расстояние)
На фиг. 3а и 3b изображены два упрощенных схематических вида конструкции устройства для катания на роликах согласно третьему варианту выполнения данного изобретения. Как показано на фиг. 3а и 3b, различие между данным вариантом выполнения и предыдущим вариантом выполнения заключается в том, что элемент 102а расположен вблизи левого бокового края платформы 101, а элемент 102b расположен вблизи правого бокового края платформы 101, то есть между двумя точками контакта земли и указанных элементов имеется относительно большое поперечное расстояние, что дополнительно облегчает использование опор для катания на роликах.
Аналогично второму варианту выполнения, элементы 102а и 102b имеют общий двигатель и, в частности, передаточный вал движущего элемента расположен поперечным образом, то есть перпендикулярно направлению движения опор для катания на роликах, при этом элементы 102а, 102b расположены соответственно на двух концах указанного вала. Движущий элемент встроен в ступицу одного из элементов, контактирующих с землей, а именно элемента 102а, непосредственно соединен с элементом 102а через передаточный вал и связан с элементом 102b, не имеющим встроенного движущего элемента. Другими словами, во время движения опор для катания на роликах элемент 102а, снабженный движущим элементом, работает как ведущее колесо, а элемент 102b, не имеющий движущего элемента, работает как ведомое колесо, которое приводится во вращение с помощью ведущего колеса.
Как вариант, в другом варианте выполнения имеется два движущих элемента, то есть каждый элемент 102а, 102b, контактирующий с землей, снабжен одним движущим элементом, вследствие чего скорость вращения элементов 102а, 102b может регулироваться по отдельности. В процессе обычного движения элементы 102а, 102b имеют одинаковую скорость вращения.
В вышеописанных первом, втором и третьем вариантах выполнения осевой центр каждого элемента, контактирующего с землей, расположен под платформой 101 для ног, при этом каждый указанный элемент также полностью расположен под платформой 101.
Как показано на фиг. ЗЬ, устройство для катания на роликах дополнительно содержит фиксирующее основание 100а, с которым связаны элементы 102а, 102b, контактирующие с землей, и которое прикреплено к нижней поверхности платформы 101. В конкретном варианте применения элементы 102а, 102b могут быть выполнены за одно целое с основанием 100а, после чего основание 100а прикрепляют к нижней поверхности платформы 101. Основание 101а прикреплено к нижней поверхности платформы для ног в горизонтальном направлении.
В других вариантах выполнения фиксирующее основание может быть прикреплено к нижней поверхности платформы для ног в вертикальном направлении. Фиксирующее основание имеет отверстие, через которое проходит передаточный вал двигателя. К каждому концу передаточного вала присоединен элемент, контактирующий с землей, или набор таких элементов так, что указанные элементы полностью расположены под платформой для ног.
Следует отметить, что в других вариантах выполнения для присоединения элементов 102а, 102b к платформе 101 может использоваться любая другая подходящая конструкция. На фиг. 3с изображен схематический вид альтернативного варианта фиксирующего основания, используемого в третьем варианте выполнения данного изобретения. Как показано на фиг. 3с, элементы 102а, 102b связаны с нижней поверхностью платформы для ног при помощи быстроразъемной конструкции 100b.
ЧЕТВЕРТЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ (два элемента 102а и 102b, контактирующие с землей, отнесены друг от друга на большое расстояние)
В отличие от устройства для катания на роликах согласно третьему варианту выполнения, в данном варианте выполнения, когда указанное устройство содержит элементы 102а, 102b, контактирующие с землей, и между этими элементами имеется относительно большое поперечное расстояние, осевой центр каждого элемента 102а, 102b расположен под платформой 101, но часть указанных элементов выступает вверх за пределы платформы 101.
Как показано на фиг. 4, упрощенный схематический вид устройства для катания на роликах согласно четвертому варианту выполнения получен в результате опускания всей платформы 101 в устройстве согласно третьему варианту выполнения.
Как вариант, в другом варианте выполнения имеется два движущих элемента, то есть каждый элемент 102а, 102b, контактирующий с землей, снабжен одним движущим элементом, вследствие чего скорость вращения элементов 102а, 102b может регулироваться по отдельности. В процессе обычного движения элементы 102а, 102b имеют одинаковую скорость вращения.
На фиг. 5 изображен схематический вид устройства для катания на роликах согласно пятому варианту выполнения данного изобретения. Как показано на фиг. 5, устройство для катания на роликах, выполненное в виде ножных опор, содержит один элемент 102, контактирующий с землей. Данный элемент 102 расположен в центре платформы 101 для ног, и в его ступице расположен двигатель. Через ступицу проходит передаточный вал 103 двигателя, выполненный с первой несущей конструкцией 104, расположенной вблизи середины вала 103. Данная несущая конструкция связана с элементом 102 и приводит его во вращение.
Кроме того, как показано на фиг. 5, на каждом конце передаточного вала может быть выполнена вторая несущая конструкция 105, при этом несущие конструкции на обоих концах передаточного вала связаны с платформой 101 с обеспечением возможности размещения двигателя и передаточного вала под платформой 101 в виде единого целого.
На фиг. 6 изображен схематический вид устройства для катания на роликах согласно шестому варианту выполнения данного изобретения. Как показано на фиг. 6, устройство для катания на роликах, выполненное в виде ножных опор, содержит два элемента 102а и 102b, контактирующих с землей. Элемент 102а расположен вблизи левого бокового края платформы 101 для ног, а элемент 102b расположен вблизи правого бокового края платформы 101. Каждый элемент 102а, 102b снабжен одним двигателем. Расположение двигателя и передаточного вала может соответствовать варианту выполнения, изображенному на фиг. 5.
Отличие вариантов выполнения, изображенных на фиг. 5 и 6, от вариантов выполнения, изображенных на фиг. 1-4, заключается в том, что платформа 101 для ног не является прямоугольной, а имеет форму дуги окружности на обоих концах.
На фиг. 7а и 7b изображены два схематических вида устройства для катания на роликах согласно седьмому варианту выполнения данного изобретения. Как показано на фиг. 7а и 7b, по сравнению с вариантом выполнения, изображенным на фиг. 1, к устройству для катания на роликах добавлен крепежный узел. Крепежный узел выполнен на платформе для ног и предназначен для закрепления ступни или участка над ступней пользователя устройства. Опционально, крепежный узел может представлять собой конструкцию с липучкой или крепежной пряжкой, при этом ступня или участок над ступней пользователя устройства фиксируется с помощью указанной липучки или крепежной пряжки для предотвращения падения пользователя с ножных опор для катания на роликах. Под ступней понимается, например, подъем ноги, а под участком над ступней - лодыжка или голень.
Кроме того, устройство для катания на роликах согласно данному варианту выполнения также содержит щиток 109, предназначенный для контакта с пяткой одной ноги, стоящей на платформе 101, с обеспечением прочного закрепления ступни на платформе 101 во время катания. В частности, щиток может иметь дугообразную форму, так что он плотно обхватывает пятку и обеспечивает устойчивую опору.
В данном варианте выполнения стабилизация ступни пользователя обеспечивается сзади и спереди при помощи крепежного узла и щитка с обеспечением эффективного предотвращения вероятности падения пользователя с ножных опор и получения травмы в процессе катания на роликах.
Кроме того, в любом из вариантов выполнения данного изобретения устройство для катания на роликах опционально содержит отсек 106 для батареек, в котором расположен комплект 107 батареек. Комплект 107 батареек предназначен для электропитания движущего элемента и других конструкций или контуров, требующих электричества. В частности, платформа 101 для ног выполнена с пустой полостью, в которой находится отсек 106 для батареек.
На фиг. 8 изображен местный схематический вид устройства для катания на роликах согласно восьмому варианту выполнения данного изобретения. В данном варианте выполнения комплект 107 батареек расположен в задней части устройства для катания на роликах, выполненного в виде ножных опор. В частности, отсек для батареек выполнен, например, в пустой полости щитка 109, и в нем расположен комплект 107 батареек.
Следует отметить, что в другом варианте выполнения, в отличие от варианта, изображенного на фиг. 8, комплект 107 батареек переносится пользователем и соединен с электрическими контурами или элементами, такими как первый контроллер, двигатель и т.п., расположенными в ножных опорах, при помощи внешнего шнура питания.
На фиг. 9 изображен схематический вид, иллюстрирующий принцип управления устройством для катания на роликах согласно девятому варианту выполнения данного изобретения. Как показано на фиг. 9, при наклоне платформы 101 вперед или назад первый контроллер генерирует управляющий электрический сигнал для регулирования выходного крутящего момента движущего элемента на основании разности углов между ожидаемым углом θ* наклона и текущим углом θ наклона платформы для ног. В частности, управляющий электрический сигнал генерируется на основании текущей угловой скорости ω при наклоне и разности θerrorзначений между ожидаемым углом θ* наклона и текущим углом θ наклона платформы для обеспечения регулирования выходного крутящего момента движущего элемента. В данном варианте выполнения управляющий электрический сигнал представляет собой, например, напряжение возбуждения, а первый контроллер (также называемый контроллером равновесия) представляет собой, например, пропорционально-интегральный дифференциальный (ПИД) контроллер.
В частности, устройство для катания на роликах может дополнительно содержать второй контроллер (также называемый контроллером скорости). Второй контроллер выполнен с возможностью определения ожидаемого угла θ* наклона на основании текущей скорости V вращения и заданной максимальной скорости V* вращения движущего элемента. В данном варианте выполнения второй контроллер, например, также представляет собой ПИД контроллер.
Кроме того, второй контроллер выполнен с возможностью определения того, превышает ли текущая скорость V вращения движущего элемента заданную максимальную скорость V* вращения или нет. Если текущая скорость вращения движущего элемента превышает заданную максимальную скорость вращения, контроллер указывает, что устройство для катания на роликах вскоре перейдет в состояние превышения скорости, после чего выводится установленное, ненулевое значение ожидаемого угла θ* наклона и, таким образом, рассчитывается разность θerror углов на основании установленного, ненулевого значения ожидаемого угла наклона и текущего угла θ наклона, и на основании данной разности θerror первый контроллер генерирует управляющий электрический сигнал для регулирования выходного крутящего момента движущего элемента и, в конечном итоге, обеспечения наклона платформы для ног в направлении, противоположном направлению движения, в результате чего скорость движения устройства ограничивается с обеспечением предотвращения превышения порогового значения скорости движения. Если текущая скорость вращения движущего элемента не превышает заданную максимальную скорость вращения, то ожидаемый угол θ* наклона равен нулю, и рассчитывается разность θerrorуглов, на основании которой первый контроллер генерирует управляющий электрический сигнал для регулирования выходного крутящего момента движущего элемента и, в конечном итоге, обеспечения динамического поддержания платформы для ног в горизонтальном состоянии.
В частности, устройство для катания на роликах также может содержать второй датчик, выполненный с возможностью считывания текущей скорости вращения движущего элемента.
Кроме того, следует отметить, что в некоторых конкретных вариантах применения управляющий электрический сигнал может быть сгенерирован без учета текущей угловой скорости при наклоне.
Кроме того, следует отметить, что в некоторых конкретных вариантах применения ожидаемый угол наклона может быть определен без использования второго контроллера, но при повторном использовании первого контроллера. В частности, первый контроллер может быть выполнен с возможностью определения ожидаемого угла θ* наклона на основании текущей скорости V вращения и заданной максимальной скорости V* вращения движущего элемента, а также с возможностью генерации управляющего электрического сигнала для регулирования выходного крутящего момента движущего элемента на основании разности значений между ожидаемым углом θ* наклона и текущим углом θ наклона платформы для ног.
Кроме того, следует отметить, что выходной сигнал движущего элемента может иметь другой вид, а крутящий момент приведен в данном варианте выполнения исключительно в качестве примера, и разные движущие элементы могут иметь выходные сигналы разных типов.
В другом конкретном варианте применения в случае, когда предусмотрен второй контроллер, он также может использоваться повторно, как и первый контроллер. В частности, второй контроллер может быть выполнен с возможностью определения ожидаемого угла θ* наклона на основании текущей скорости V вращения и заданной максимальной скорости V* вращения движущего элемента, а также с возможностью генерации управляющего электрического сигнала для регулирования выходного крутящего момента движущего элемента на основании разности значений между ожидаемым углом θ* наклона и текущим углом θ наклона платформы для ног.
На фиг. 10 изображена схема расположения вспомогательных элементов, контактирующих с землей, согласно десятому варианту выполнения данного изобретения. Как показано на фиг. 10, по сравнению с вариантом выполнения, изображенным на фиг. 1, платформа 101 для ног выполнена с одним вспомогательным элементом 110а, контактирующим с землей, расположенным спереди для ограничения максимального угла наклона вперед, и одним вспомогательным элементом 110b, контактирующим с землей, расположенным сзади для ограничения максимального угла наклона назад.
В частности, в данном варианте выполнения под платформой 101 может быть расположен крепежный узел 111, на котором может быть закреплен вспомогательный элемент 110а или 110b.
Следует отметить, что вспомогательные элементы, контактирующие с землей, описанные со ссылкой на фиг. 10, могут быть включены в другие варианты выполнения устройства для катания на роликах, за исключением варианта выполнения, изображенного на фиг. 1.
Кроме того, количество вспомогательных элементов, контактирующих с землей, не ограничено данными вариантами выполнения. Например, в некоторых вариантах применения вспомогательный элемент, контактирующий с землей, выполнен только в передней или задней части платформы для ног. Более того, количество вспомогательных элементов, расположенных в передней или задней части, не ограничено данными вариантами выполнения, и возможно расположение нескольких таких элементов в виде набора.
В случае наличия вспомогательных элементов, контактирующих с землей, для удобства различия элементы, описанные в предыдущих вариантах выполнения, также называют основными элементами, контактирующими с землей, при этом их периметр качения больше, чем периметр качения вспомогательных элементов, контактирующих с землей. Следует отметить, что основные и вспомогательные элементы, контактирующие с землей, названы так лишь в качестве примера при условии, что к техническим эффектам, обеспечиваемым ими, относится создание точки контакта с поверхностью качения (например землей).
В одном варианте выполнения вспомогательный элемент, контактирующий с землей, расположен перед основными элементами, контактирующими с землей, для обеспечения контакта с землей при наклоне платформы для ног вперед с ограничением, таким образом, максимального угла наклона платформы вперед и регулированием тем самым выходного сигнала так, чтобы его значение не превышало первое заданное пороговое значение. Вспомогательный элемент, контактирующий с землей, полностью расположен под платформой для ног. В частности, на нижней поверхности платформы для ног выполнена передняя вильчатая конструкция, с помощью которой вспомогательный элемент размещен под указанной платформой.
В одном таком варианте выполнения вспомогательный элемент, контактирующий с землей, расположен сзади основных элементов, контактирующих с землей, для обеспечения контакта с землей при наклоне платформы для ног назад с ограничением, таким образом, максимального угла наклона платформы назад и регулирования тем самым выходного сигнала так, чтобы его значение не превышало второе заданное пороговое значение. Вспомогательный элемент, контактирующий с землей, полностью расположен под платформой для ног. В частности, на нижней поверхности платформы для ног выполнена задняя вильчатая конструкция, с помощью которой вспомогательный элемент размещен под указанной платформой.
Кроме того, следует отметить, что в дополнение к ограничению максимального угла наклона платформы для ног, вспомогательные элементы, контактирующие с землей, могут дополнительно способствовать качению.
Следует отметить, что в вышеописанных вариантах выполнения устройство для катания на роликах может работать в состоянии электрической активации с использованием двигателя или работать в состоянии активации мускульной силой пользователя.
Для обеспечения возможности рулевого управления выполнен датчик рулевого управления, предназначенный для считывания положения ступни пользователя на платформе для ног. При этом каждый из третьих контроллеров выполнен с возможностью регулирования выходного сигнала движущего элемента на основании положения ступни пользователя на платформе для ног в соответствии с третьим контроллером, так что между двумя элементами, контактирующими с землей и соответствующими третьему контроллеру, образуются разности скоростей (первая и вторая разности скоростей, описанные ниже), необходимые для рулевого управления одиночным устройством для катания на роликах, и между двумя устройствами для катания на роликах образуется разность скоростей (третья разность скоростей, описанная ниже), необходимая для рулевого управления двумя устройствами для катания на роликах, объединенными в одно целое.
В конкретном варианте применения датчики рулевого управления считывают положение ступни пользователя на платформе для ног, соответствующее указанному датчику, и генерируют первые измерительные данные рулевого управления и вторые измерительные данные рулевого управления. Третий контроллер выполнен с возможностью генерации первых или вторых измерительных данных рулевого управления в зависимости от положения ступни пользователя на соответствующей платформе для ног, считываемого каждым датчиком рулевого управления, генерации первой команды рулевого управления на основании указанных первых данных и генерации второй команды рулевого управления на основании указанных вторых данных, последующего управления работой элемента, контактирующего с землей и подчиняющегося первой команде рулевого управления, в соответствии с указанной первой командой и управления работой элемента, контактирующего с землей и подчиняющегося второй команде рулевого управления, в соответствии с указанной второй командой так, что между каждыми двумя основными элементами, контактирующими с землей, образуются первая и вторая разности скоростей для регулирования рулевого управления и между двумя устройствами для катания на роликах образуется третья разность скоростей для регулирования рулевого управления.
На фиг. 11 изображена блок-схема способа рулевого управления согласно одиннадцатому варианту выполнения данного изобретения. В иллюстративных целях в данном варианте выполнения каждое устройство для катания на роликах в качестве примера содержит два датчика давления и третий контроллер, выполненный с возможностью осуществления технического аналога прямого или опосредованного рулевого управления. В частности, два устройства для катания на роликах объединены друг с другом при помощи соединителя. Как показано на фиг. 11, способ рулевого управления включает следующие операции.
S1101: генерация первых измерительных данных о давлении и вторых измерительных данных о давлении на основании положений ступни пользователя на соответствующих педалях, считываемых каждым из двух датчиков давления.
В данном варианте выполнения положение ступни может представлять собой горизонтальный след, оставляемый пользователем на платформе для ног.
S1102: генерация первой команды рулевого управления на основании первых измерительных данных рулевого управления, а именно первых данных о давлении.
S1103: генерация второй команды рулевого управления на основании вторых измерительных данных рулевого управления, а именно вторых данных о давлении.
Как описано выше, благодаря тому, что каждое устройство для катания на роликах содержит два датчика давления, один датчик давления генерирует одни измерительные данные. Первая команда рулевого управления генерируется на основании первых измерительных данных рулевого управления (согласно разнице между двумя первыми измерительными данными рулевого управления), и, аналогичным образом, вторая команда рулевого управления генерируется на основании разницы между двумя вторыми измерительными данными рулевого управления.
S1104: управление работой двух соответствующих элементов, контактирующих с землей, на основании первой команды рулевого управления и управление работой двух соответствующих элементов, контактирующих с землей, на основании второй команды рулевого управления так, что между элементами в каждой паре образуется первая и вторая разности скоростей для регулирования рулевого управления, и между двумя устройствами для катания на роликах, объединенными в одно целое, образуется третья разность скоростей для регулирования рулевого управления.
Поскольку в данном изобретении каждое устройство для катания на роликах содержит по меньшей мере два колеса, в процессе руления необходимо обеспечить поворот каждого отдельного устройства и взаимный поворот двух устройств. Таким образом, между двумя колесами каждого устройства имеются разности скоростей вращения, то есть первая разность скоростей вращения и вторая разность скоростей вращения, и вследствие взаимного поворота двух устройств обеспечивается третья разность скоростей вращения между двумя устройствами для катания на роликах, объединенными в одно целое.
Например, в конкретном варианте реализации скорости колес увеличиваются слева направо при повороте влево и уменьшаются слева направо при повороте вправо, так что образуются вышеуказанные первая, вторая и третья разности скоростей вращения.
Принцип образования первой и второй разностей скоростей вращения в данном варианте выполнения аналогичен принципу образования разности скоростей вращения для регулирования рулевого управления в вышеописанном одиночном устройстве для катания на роликах.
Как вариант, в другом варианте выполнения каждое устройство для катания на роликах может содержать датчики рулевого управления других типов.
Как вариант, в еще одном варианте выполнения датчик рулевого управления может представлять собой рулевой вал, выполненный с возможностью считывания положения ступни пользователя на платформе для ног для генерации первого рулевого крутящего момента и/или второго рулевого крутящего момента. Соответственно, генерирование первой команды рулевого управления на основании первых измерительных данных включает генерирование указанной команды в соответствии с первым рулевым крутящим моментом и/или генерирование второй команды рулевого управления на основании вторых измерительных данных включает генерирование указанной команды в соответствии со вторым рулевым крутящим моментом. Вал рулевого управления проходит перпендикулярно направлению движения устройства для катания на роликах.
Как вариант, в еще одном варианте выполнения датчик рулевого управления может представлять собой гироскоп, выполненный с возможностью считывания положения ступни пользователя на платформе для ног для генерации первых измерительных данных об угловом перемещении и/или вторых измерительных данных об угловом перемещении. Соответственно, генерирование первой команды рулевого управления на основании первых данных включает генерирование указанной команды в соответствии с первыми данными об угловом перемещении и/или генерирование второй команды рулевого управления на основании вторых данных включает генерирование указанной команды в соответствии со вторыми данными об угловом перемещении.
Первая команда рулевого управления и/или вторая команда рулевого управления генерируются на основании положения горизонтального следа ноги пользователя на платформе для ног, считанного датчиком рулевого управления.
Как вариант, в другом варианте выполнения слева и справа на платформе для ног устройств для катания на роликах выполнены пружины, так что указанная платформа может наклоняться влево или вправо. Датчик рулевого управления представляет собой фотоэлектрический датчик, выполненный с возможностью считывания положения ступни пользователя на платформе для ног так, что в результате наклона платформы для ног влево или вправо могут быть сгенерированы первые и/или вторые фотоэлектрические измерительные данные. Соответственно, генерирование первой команды рулевого управления на основании первых измерительных данных рулевого управления включает генерирование указанной команды в соответствии с первыми фотоэлектрическими измерительными данными и/или генерирование второй команды рулевого управления на основании вторых измерительных данных рулевого управления включает генерирование указанной команды в соответствии со вторыми фотоэлектрическими измерительными данными.
В случае одиночного устройства для катания на роликах, содержащего два основных элемента, контактирующих с землей, принцип создания разности скоростей вращения двух основных элементов, контактирующих с землей, заключается в следующем. На основании положения ступни пользователя на платформе для ног, считываемого датчиком рулевого управления, генерируют измерительные данные рулевого управления, затем на основании указанных данных генерируют команды рулевого управления и управляют двумя элементами, контактирующими с землей, на основании команд рулевого управления так, что между указанными элементами образуется разность скоростей вращения для регулирования рулевого управления. Датчик рулевого управления может представлять собой вышеописанный фотоэлектрический датчик, вал рулевого управления и т.п.
Согласно вышеописанным вариантом выполнения на по меньшей мере одном устройстве для катания на роликах имеется датчик положения пользователя, выполненный с возможностью определения того, стоит ли пользователь на устройстве на одной ноге или нет. Если пользователь стоит на одной ноге, имеющиеся датчики рулевого управления считывают положение ступни пользователя на платформе для ног, соответствующей каждому такому датчику, в результате чего генерируются первые и/или вторые измерительные данные рулевого управления.
Следует отметить, что между вышеописанными двумя устройствами для катания на роликах возможен обмен данными, и если одно устройство генерирует первые измерительные данные рулевого управления, то запускается другое устройство с обеспечением генерации вторых измерительных данных рулевого управления. Таким образом, указанное запускаемое устройство для катания на роликах может быть выполнено без датчика рулевого управления.
В данном варианте выполнения первый контроллер может быть повторно использован в качестве третьего контроллера. Однако следует отметить, что в случае, когда третий контроллер отсутствует, наряду с повторным использованием первого контроллера в качестве третьего контроллера также возможно использование в качестве него второго контроллера. Или же, в случае наличия третьего контроллера, указанный контроллер может повторно использоваться в качестве вышеописанного первого или второго контроллера.
В частности, в вышеописанных вариантах выполнения двигатель может представлять собой двигатель, встроенный в колесо, при этом в других вариантах выполнения двигатель также может представлять собой высокооборотный двигатель. Кроме того, в вышеуказанных вариантах выполнения колеса могут быть выполнены с крышками.
Кроме того, в еще одном варианте выполнения в случае, когда каждое устройство для катания на роликах содержит датчик рулевого управления, а также содержит платформу для ног, третий контроллер и один основной элемент, контактирующий с землей, датчик рулевого управления выполнен с возможностью считывания положения ступни пользователя на платформе для ног, а каждый из третьих контроллеров выполнен с возможностью регулирования выходного сигнала соответствующего движущего элемента на основании положения ступни пользователя на платформе для ног, соответствующей каждому из третьих контроллеров, так, что между двумя устройствами для катания на роликах образуется разность скоростей для обеспечения рулевого управления указанными устройствами, объединенными в одно целое.
В частности, в одном варианте применения каждый датчик рулевого управления считывает положение ступни пользователя на платформе для ног, соответствующей каждому датчику рулевого управления, с обеспечением генерации первых измерительных данных рулевого управления или вторых измерительных данных рулевого управления. Каждый из третьих контроллеров выполнен с возможностью генерации первой команды рулевого управления на основании указанных первых данных или генерации второй команды рулевого управления на основании указанных вторых данных, а также с возможностью управления работой элемента, контактирующего с землей и соответствующего первой команде рулевого управления, или работой элемента, контактирующего с землей и соответствующего второй команде рулевого управления, так, что между двумя основными элементами, контактирующими с землей, образуется третья разность скоростей для регулирования рулевого управления.
В случае, когда каждое устройство для катания на роликах содержит только один основной элемент, контактирующий с землей, рулевое управление указанным устройством аналогично рулевому управлению устройством, содержащим два основных элемента, контактирующих с землей, то есть выходной крутящий момент двигателя каждого устройства регулируется по отдельности с обеспечением тем самым регулирования скоростей вращения двух основных элементов, контактирующих с землей, и образования, в конечном итоге, разности скоростей вращения для регулирования рулевого управления.
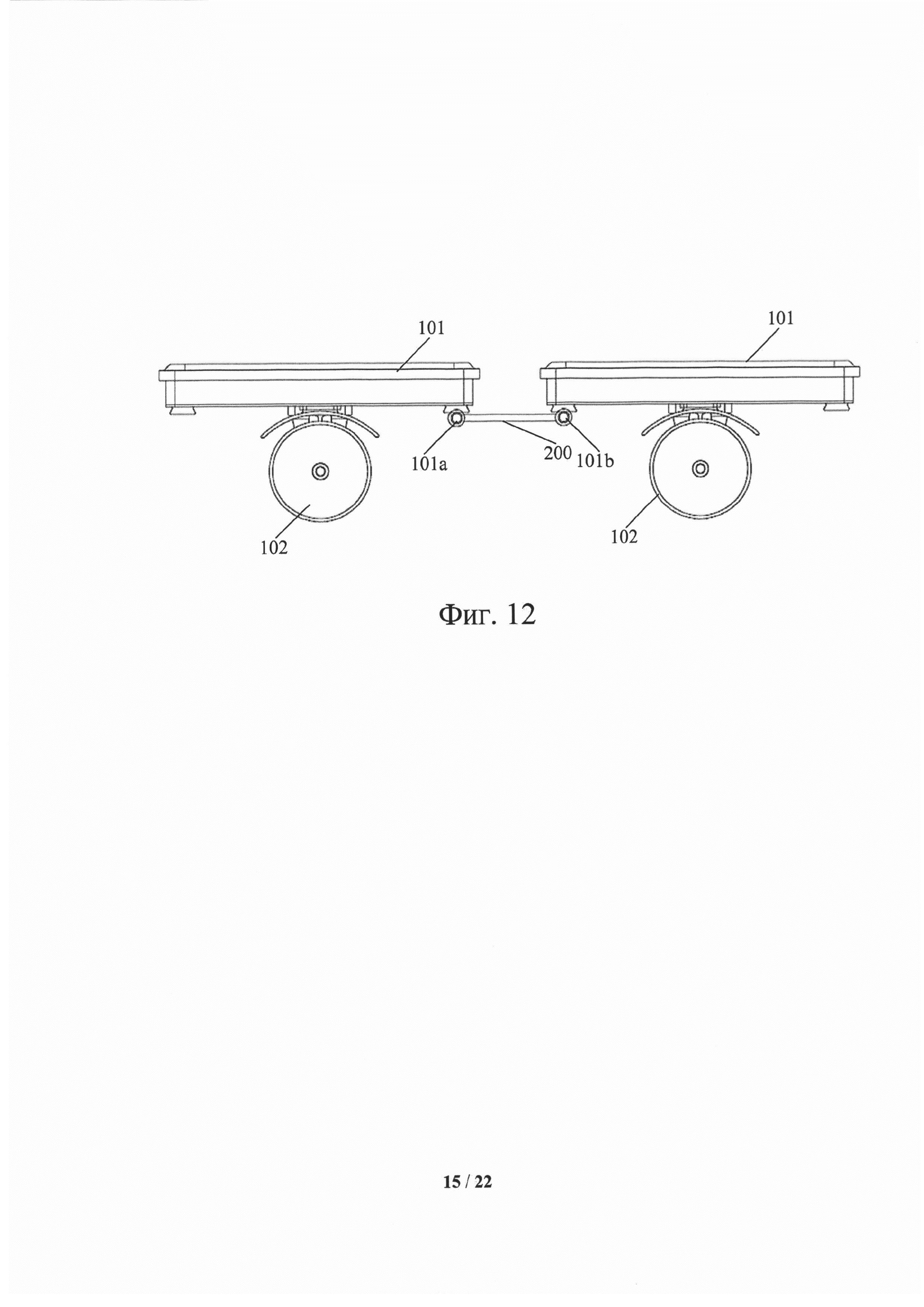
На фиг. 12 изображен схематический вид электрического балансирного средства передвижения согласно двенадцатому варианту выполнения данного изобретения. Как показано на фиг. 12, конструкция отдельного устройства для катания на роликах соответствует конструкции, изображенной на фиг. 1, при этом два устройства для катания на роликах собраны друг с другом в одно целое вдоль продольного направления торцом к торцу при помощи соединителя 200.
В частности, в данном варианте выполнения в задней части платформы 101 для ног одного из устройств для катания на роликах выполнен крепежный блок 101а, а в передней части платформы 101 для ног другого из указанных устройств выполнен крепежный блок 101b. Один конец соединителя 200 прикреплен к первому крепежному блоку 101а, а другой конец соединителя прикреплен ко второму крепежному блоку 101b.
На фиг. 13 изображен схематический вид электрического балансирного средства передвижения согласно тринадцатому варианту выполнения данного изобретения. Как показано на фиг. 13, один конец соединителя 200 закреплен на боковой стороне одного из двух устройств для катания на роликах, изображенных на фиг. 10, а другой конец соединителя закреплен на боковой стороне другого устройства, обращенной к боковой стороне первого устройства, с обеспечением сборки двух устройств друг с другом. В частности, соединитель выполнен с возможностью обеспечения сборки двух устройств для катания на роликах бок о бок друг с другом вдоль поперечного направления.
На фиг. 14 изображен схематический вид электрического балансирного средства передвижения согласно четырнадцатому варианту выполнения данного изобретения. Как показано на фиг. 14, один конец соединителя 200 закреплен на боковой стороне одного из двух устройств для катания на роликах, изображенных на фиг. 1, а другой конец соединителя закреплен на боковой стороне другого устройства, обращенной к боковой стороне первого устройства, с обеспечением сборки двух устройств друг с другом. В частности, соединитель выполнен с возможностью обеспечения сборки двух устройств для катания на роликах бок о бок друг с другом вдоль поперечного направления.
На фиг. 15 изображен схематический вид электрического балансирного средства передвижения согласно пятнадцатому варианту выполнения данного изобретения. Как показано на фиг. 15, по сравнению с фиг. 1, в данном варианте выполнения добавлены вспомогательные основные элементы 110а, 110b, контактирующие с землей, а крепежное основание 100, изображенное на фиг. 3b, изменено для обеспечения его расположения в вертикальном направлении и прикреплено к нижней поверхности платформы для ног. Крепежное основание имеет отверстие, через которое проходит передаточный вал двигателя. Один из основных элементов 102, контактирующих с землей, связан с одним концом передаточного вала, а другой основной элемент, контактирующий с землей, связан с другим концом передаточного вала так, что элементы 102 полностью расположены под платформой 102 для ног.
В вышеописанных вариантах выполнения один конец соединителя присоединен к передаточному валу одного из двух устройств для катания на роликах, а другой конец соединителя присоединен к передаточному валу другого устройства для катания на роликах.
Опционально, в вышеописанных вариантах выполнения длина соединителя может быть регулируемой для обеспечения регулирования расстояния между двумя смежными устройствами для катания на роликах.
Опционально, в вышеописанных вариантах выполнения посередине соединителя может быть выполнен поворотный механизм, так что часть, расположенная слева от поворотного механизма соединителя, и часть, расположенная справа от поворотного механизма соединителя, могут свободно поворачиваться независимо друг от друга под действием указанного механизма.
Кроме того, в случае, когда два устройства для катания на роликах собраны друг с другом при помощи соединителя, педали указанных двух устройств могут наклоняться вперед или назад независимым образом. При этом электрическое балансирное средство передвижения, образованное в результате сборки, может перемещаться вперед или назад как одно целое вследствие изменений в положении ступни пользователя.
Кроме того, вышеописанные первый контроллер, второй контроллер и третий контроллер могут быть выполнены на крепежном основании в соответствии с взаимным положением основных элементов, контактирующих с землей, и платформы для ног, которая выполнена с возможностью регулирования в горизонтальной плоскости.
Разумеется, в другом варианте выполнения, если горизонтальной регулировки взаимного положения основных элементов, контактирующих с землей, и платформы для ног не требуется, вышеописанные первый, второй и третий контроллеры могут быть выполнены в указанной платформе.
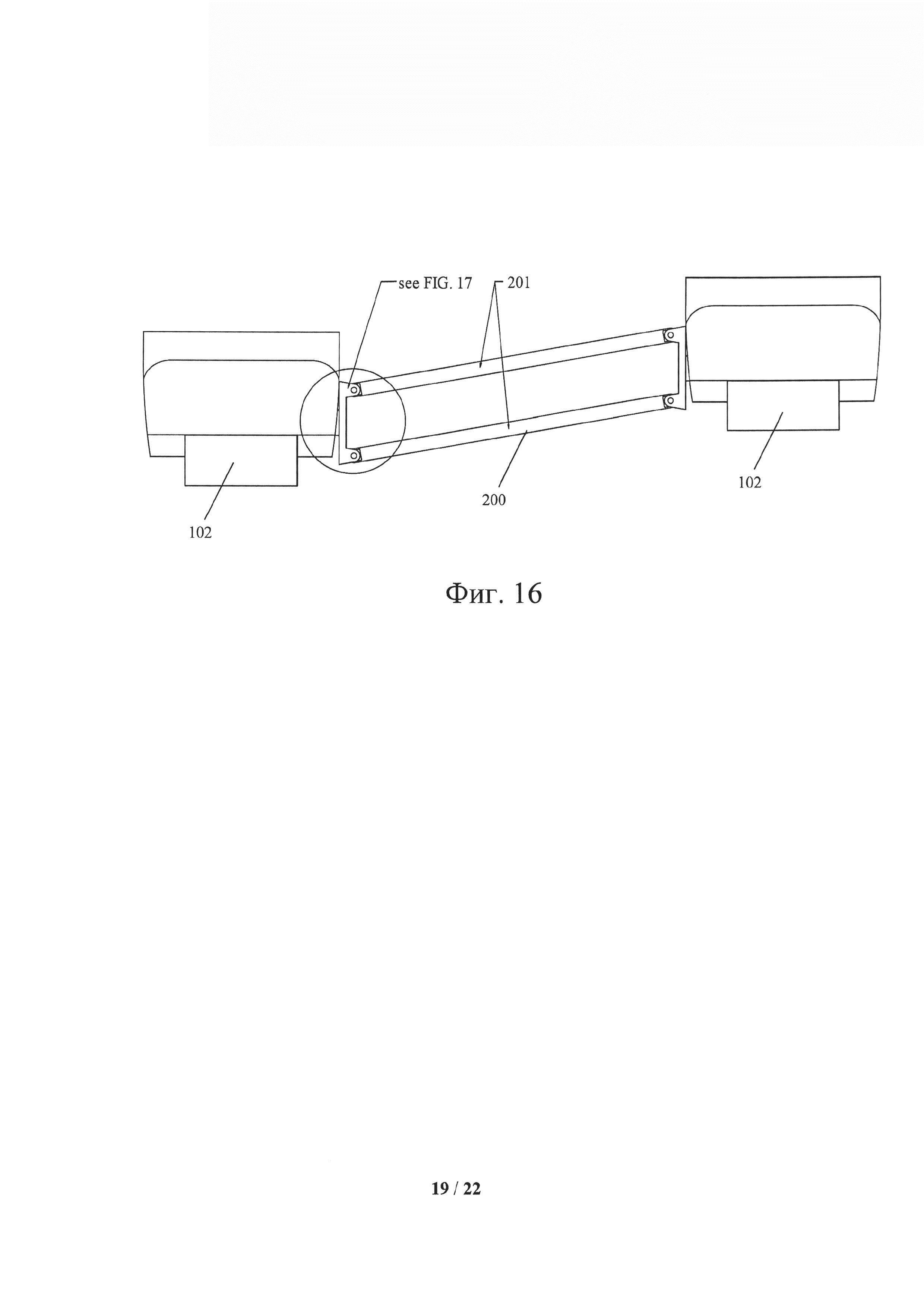
На фиг. 16 изображен схематический вид электрического балансирного средства передвижения согласно шестнадцатому варианту выполнения данного изобретения, а на фиг. 17 изображен схематический вид фрагментов обоих концов соединителя согласно семнадцатому варианту выполнения. Для ясности на фиг. 16 схематически показаны только элементы 102, контактирующие с землей, и соединитель 200. Как изображено на фиг. 16 и 17, соединитель дополнительно обеспечивает совместное действие двух устройств для катания на роликах в перпендикулярном направлении. В частности, в данном варианте выполнения на каждом конце соединителя выполнены крепежный держатель 301 и поворотный вал 302, при этом держатель 301 выполнен на соответствующем устройстве для катания на роликах, а поворотный вал 302 расположен на держателе 301. Один конец соединителя установлен вокруг одного поворотного вала 302, а другой конец соединителя установлен вокруг другого поворотного вала с обеспечением возможности совместного действия двух устройств для катания на роликах в перпендикулярном направлении.
В частности, в данном варианте выполнения соединитель 200 содержит две соединительные тяги 201, расположенные одна над другой параллельным образом. Каждая соединительная тяга 201 соответствует одному крепежному держателю и одному поворотному валу 302, вследствие чего может быть обеспечено совместное действие двух устройств для катания на роликах в перпендикулярном направлении. Например, в частности, при возникновении препятствия указанные два устройства могут совместно действовать в перпендикулярном направлении для обеспечения преодоления ими препятствия.
Хотя две соединительные тяги 201, изображенные на фиг. 16 и 17, расположены параллельно одна над другой, указанные две тяги могут быть расположены параллельно одна за другой.
Следует отметить, что вертикальное перемещение двух устройств для катания на роликах осуществляется путем взаимодействия крепежных держателей и поворотных валов, однако на основании данного изобретения специалистами также могут использоваться другие альтернативные решения, например подшипники.
На фиг. 18 изображен схематический вид электрического балансирного средства передвижения согласно восемнадцатому варианту выполнения данного изобретения, а на фиг. 19 изображен схематический вид фрагментов обоих концов соединителя согласно девятнадцатому варианту выполнения. Как и прежде, для ясности на фиг. 18 схематически показаны только элементы 102, контактирующие с землей, и соединитель 200. Как изображено на фиг. 18 и 19, каждый конец соединителя 200 выполнен с многонаправленным сочленением 400, при этом каждое сочленение 400 расположено на соответствующем устройстве для катания на роликах с обеспечением возможности совместного действия двух устройств в любом направлении.
Многонаправленное сочленение 400 содержит первое подвижное сочленение 401 и второе подвижное сочленение 402, при этом сочленения 401 и 402, расположенные на каждом конце соединителя, взаимодействуют друг с другом с обеспечением возможности совместного действия двух устройств для катания на роликах в любом направлении.
В частности, первое подвижное сочленение 401 содержит неподвижную вилку 411 и первую поворотную вилку 421, при этом неподвижная вилка 411 выполнена на соответствующем устройстве для катания на роликах, а первая поворотная вилка 421 установлена на неподвижной вилке 411 при помощи первого поворотного вала 431. Второе подвижное сочленение 402 содержит вторую поворотную вилку 422, которая соединена с первой поворотной вилкой 421 и установлена на конце соединителя 200 при помощи второго поворотного вала 432.
Следует отметить, что в данном варианте выполнения первая поворотная вилка 421 и вторая поворотная вилка 422 выполнены в виде одного элемента с образованием единой поворотной вилки. Разумеется, в других вариантах выполнения первая и вторая поворотные вилки могут быть выполнены отдельно друг от друга при условии реализации многонаправленного поворотного перемещения. Многонаправленное поворотное перемещение, например, также называют свободным поворотом на 360°.
Кроме того, посередине соединителя 200 выполнено третье подвижное сочленение 403 для обеспечения возможности совместного действия двух устройств для катания на роликах в любом направлении. Конструкция третьего сочленения 403 может быть аналогична конструкции первого или второго подвижного сочленения. В случае наличия многонаправленного сочленения третье сочленение 403 может способствовать совместному действию двух устройств для катания на роликах в любом направлении.
Тем не менее, следует отметить, что в других вариантах выполнения для обеспечения возможности совместного действия двух устройств для катания на роликах в любом направлении выполнено только третье подвижное сочленение 403.
Согласно вышеописанным вариантам выполнения балансирное средство передвижения также может содержать четыре устройства для катания на роликах, причем два устройства, расположенных одно за другим, соединены при помощи соединителя, и два устройства, расположенных бок о бок, соединены при помощи соединителя. В этом случае балансирное средство передвижения может быть приведено в действие двумя пользователями, находящимися один позади другого. В данном описании выражение «содержит» или «может содержать» означает наличие соответствующих функций, операций или элементов без ограничения при этом одной или более дополнительными функциями, операциями или элементами. В данном описании такие слова как «содержит» и/или «имеет» могут пониматься как указание на то, что существует несколько свойств, количеств, этапов, операций, компонентов, элементов и/или их комбинаций или имеется возможность их добавления.
В данном описании выражения «А или В», «по меньшей мере одно из А и/или В» или «одно или более из А и/или В» могут охватывать все возможные комбинации перечисленных элементов. Например, выражение «А или В», «по меньшей мере одно из А и В» или «по меньшей мере одно из А или В» может охватывать: (1) по меньшей мере одно А, (2) по меньшей мере одно В или (3) по меньшей мере одно А и по меньшей мере одно В.
Слова «первый» или «второй», применяемые в вариантах выполнения данного изобретения, могут обозначать различные элементы, но безотносительно к порядку и/или значимости, при этом указанные слова не накладывают ограничений на соответствующие элементы. Вышеуказанные слова используются исключительно для отличия одних элементов от других. Например, первое приспособление пользователя и второе приспособление пользователя означают разные приспособления пользователя, хотя и то, и другое является приспособлением пользователя. Например, первый элемент может быть назван вторым элементом и, аналогичным образом, второй элемент может быть назван первым элементом без отклонения от объема данного изобретения.
Если элемент (например первый элемент) назван «связываемым (функционально или с возможностью обмена данными)» с другим элементом (например вторым элементом), или «связанным (функционально или с возможностью обмена данными)» с другим элементом (например вторым элементом), или «соединенным (функционально или с возможностью обмена данными)» с другим элементом (например вторым элементом), это следует понимать как указание на то, что данный элемент присоединен непосредственно к указанному другому элементу или присоединен к нему опосредовано при помощи еще одного другого элемента (например, третьего элемента). В отличие от этого, следует понимать, что если элемент (например, первый элемент) назван «непосредственно соединенным» или «непосредственно связанным» с другим элементом (вторым элементом), то между данным элементом и другим элементом не установлен никакой элемент (например, третий элемент).
Выражения «предназначенный для», используемое в данном документе, могут быть заменены следующими выражениями: «подходящий для», «имеющий способность», «выполненный с возможностью», «сконфигурированный для», «выполненный для» или «способный». Слова «предназначенный для» не обязательно должны означать «специально спроектированный для» в случае аппаратных средств. Как вариант, в некоторых случаях выражение «оборудование, предназначенное для…» может указывать на то, что данное оборудование и другое оборудование или элементы в совокупности «выполнены с возможностью…». Например, фраза «процессор, подходящий для (или предназначенный для) выполнения А, В и С» может означать специализированный процессор (например встроенный процессор), который специально предназначен для выполнения соответствующих операций, или универсальный процессор (например центральный процессор или вспомогательный процессор) для выполнения соответствующих операций путем выполнения одной или более системных программ, хранящихся в памяти.
Вышеописанные варианты выполнения устройства являются исключительно иллюстративными, при этом модули, описанные как отдельные компоненты, могут быть разделены или не разделены физически, а компоненты, изображенные в виде модулей, могут представлять или не представлять собой физические модули, то есть могут быть расположены в одном положении или распределены по нескольким модулям сети, при этом часть модулей или все модули могут быть выбраны согласно реальному требованию по осуществлению задач, решаемых вариантами выполнения. Специалисты в данной области техники смогут понять и реализовать вышеописанное без выполнения какой-либо творческой работы.
Реферат
Варианты выполнения данного изобретения относятся к устройству для катания на роликах и к электрическому балансирному средству передвижения, содержащему платформу для ног, один или более элементов, контактирующих с землей, первый датчик, один или более движущих элементов и первый контроллер. Платформа для ног связана с первым датчиком и элементами, контактирующими с землей и связанными с движущим элементом, а первый контроллер связан с первым датчиком и движущим элементом. Платформа для ног выполнена с возможностью стояния на ней на одной ноге и с возможностью наклона вперед или назад при стоянии на одной ноге, указанные один или более элементов, контактирующих с землей, выполнены с возможностью работы вследствие активации движущего элемента, первый датчик выполнен с возможностью считывания положения пользователя на платформе для ног, указанные один или более движущих элементов выполнены с возможностью генерации выходного сигнала для управления работой элементов, контактирующих с землей, и поддержания всего устройства для катания на роликах в равновесии, а первый контроллер выполнен с возможностью управления генерацией указанного выходного сигнала на основании положения пользователя, вследствие чего обеспечиваются более комфортные ощущения при использовании электрического балансирного средства передвижения. 5 з.п. ф-лы, 22 ил.
Комментарии