Устройство крепления с двойным управлением - RU2394621C2
Код документа: RU2394621C2
Чертежи
Описание
УСТРОЙСТВО КРЕПЛЕНИЯ С ДВОЙНЫМ УПРАВЛЕНИЕМ
Настоящее изобретение относится к области устройств крепления обуви на спортивном инвентаре для скольжения.
Более конкретно изобретение относится к устройству крепления ботинка на спортивном инвентаре (лыжи, сноуборд, снегоступ, ледовые коньки или роликовые коньки и т.д.) и, в частности, к устройству крепления лыжного ботинка на соответствующей лыже.
Во всех случаях такое крепление содержит запорный механизм, предназначенный для взаимодействия с соединительным узлом ботинка, и систему расцепления, приводимую в действие пользователем для расцепления механизма.
Запорный механизм может быть механизмом самых разных типов так же, как и соответствующий соединительный узел ботинка.
Во многих устройствах крепления, в частности, для беговых лыж, прогулочных лыж или горных лыж соединительный узел ботинка выполнен в виде соединительного штыря, заходящего в щечку. Такая система описана, например, в патентах FR-2638974, FR-2645764, FR-2834473, FR-2742060, FR-2856312, FR-2738158, EP-551899, EP-904139.
В других устройствах соединительный узел выполняют из двух частей: либо из двух параллельных соединительных штырей (EP-679415, FR-2853253, FR-2843310, WO-01/93963), либо из переднего упора и заднего захватного выступа (FR-2776200, FR-2733159, EP-1100601, DE-10.2004.018296).
Другие устройства описаны, например, в патенте EP-1492598.
Все вышеперечисленные устройства содержат запорный механизм, содержащий, по меньшей мере, одну подвижную деталь, предназначенную для взаимодействия с соединительным узлом ботинка. Эта подвижная деталь выполнена с возможностью перемещения между активным положением, в котором она обеспечивает сцепление между соединительным узлом и устройством крепления, и положением расцепления, в котором она позволяет соединительному узлу и, следовательно, ботинку, отсоединиться от устройства крепления.
Некоторые из этих устройств являются креплениями типа «степ-ин» (называемые также полуавтоматическими устройствами или устройствами автоматического сцепления), поскольку в них сцепление соединительного узла с устройством крепления происходит только за счет того, что пользователь подводит соединительный узел к устройству крепления и производит определенное усилие для осуществления сцепления. В большинстве случаев автоматическое сцепление происходит в результате взаимодействия соединительного узла (или другой части ботинка) с соответствующим элементом устройства крепления. В некоторых устройствах требуется перевести крепление в расцепленное положение (при помощи отдельной операции, чаще всего вручную), поскольку взаимодействие обеспечивает только сцепление запорного устройства (см., например, ЕР-1100601). В других устройствах запорный механизм находится в положении сцепления, и взаимодействие обеспечивает расцепление механизма, который затем запирается автоматически, как правило, под действием упругого элемента (см., например, FR-2645764).
В других устройствах пользователь должен осуществлять специальную операцию расцепления и сцепления как для надевания, так и для и снятия лыжи.
Тем не менее во всех случаях запорные механизмы содержат систему расцепления, позволяющую пользователю перевести запорный механизм в открытое положение (или расцепленное) и, без какого-либо особого усилия, в любой момент отсоединить ботинок от устройства крепления. Для осуществления расцепления система расцепления (как правило, рычаг, тяга или кнопка) должна быть переведена из первого положения во второе положение. Пользователь управляет этой системой либо при помощи руки, либо при помощи приспособления, например, лыжной палки. В случае необходимости, это управление можно осуществлять в два этапа: предварительный этап расцепления (во время которого, например, захватный элемент приподнимают) и собственно расцепление (путем воздействия на приподнятый перед этим захватный элемент). В известных системах расцепления положение расцепления всегда остается одним и тем же, и направление действия на систему расцепления для открытия запорного механизма всегда остается одним и тем же.
В силу различных причин, в частности, из соображений уменьшения габаритов, веса, повышения надежности и предупреждения случайного расцепления устройства крепления, системы расцепления не всегда являются в достаточной степени эргономичными. С другой стороны, они обладают относительной эргономичностью во многих ситуациях, но теряют ее в некоторых других ситуациях, в которых оказывается пользователь.
Так, в случае крепления, предназначенного для детских лыж, возникают ситуации, когда система легко используется ребенком, но не может легко управляться другим лицом со стороны, например, взрослым, который хочет помочь ребенку снять систему крепления. В других случаях система крепления оказывается чрезвычайно сложной для управления пользователем, когда он совершает падение и хочет освободиться от лыж, хотя в нормальной ситуации система является вполне удовлетворительной.
Задачей настоящего изобретения является создание новой конструкции устройства крепления, управление которым не представляло бы трудностей во всех возникающих ситуациях.
Для решения поставленной задачи предлагается устройство крепления ботинка на спортивном инвентаре, содержащее запорный механизм, предназначенный для взаимодействия с соединительным узлом ботинка, и систему расцепления, приводимую в действие пользователем для расцепления механизма, отличающееся тем, что систему расцепления выполняют с возможностью ее приведения в действие как непосредственно, так и опосредованно по выбору, по меньшей мере, в двум разных направлениях управления для обеспечения расцепления механизма. Благодаря этому пользователь или любое другое помогающее ему лицо может выбрать любой, наиболее подходящий для него способ управления.
Согласно другому отличительному признаку настоящего изобретения система расцепления содержит, по меньшей мере, два разных узла управления, каждым из которых можно манипулировать в одном из, по меньшей мере, двух направлений управления, получая, таким образом, возможность наилучшим образом использовать геометрию узла управления для каждого из двух способов управления. В этом случае можно предусмотреть, чтобы система расцепления содержала первый узел управления, который, при воздействии на него в первом направлении, управляет непосредственно расцеплением запорного механизма, и второй узел управления, который, при воздействии на него во втором направлении, управляет расцеплением запорного механизма через первый узел управления.
В качестве варианта, система расцепления может содержать единый узел управления, приводимый в действие, по меньшей мере, по двум разным направлениям управления, за счет чего достигается простота, низкая себестоимость устройства и повышается надежность его работы.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, в числе которых:
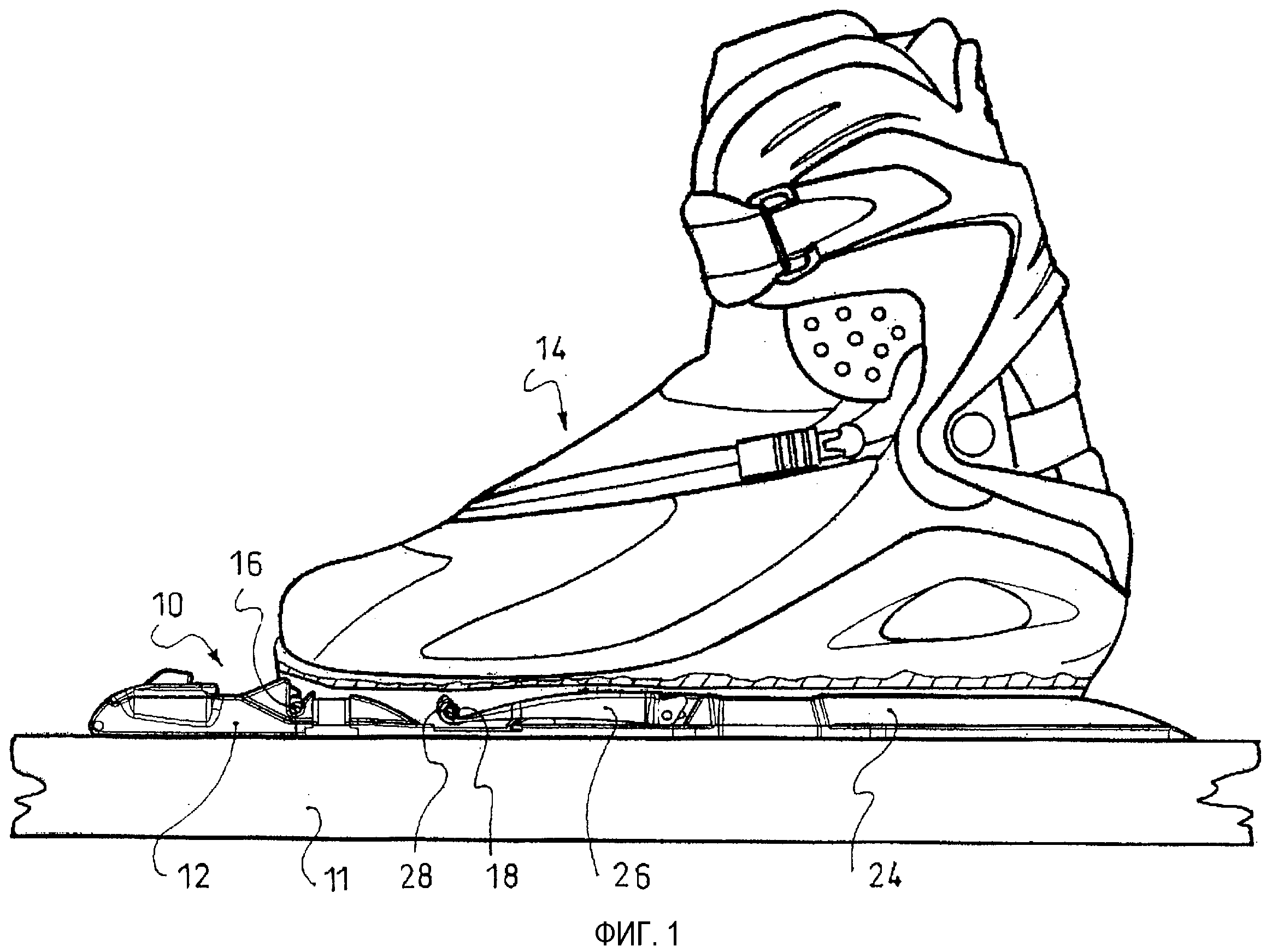
Фиг.1 представляет собой общий схематичный вид лыжного ботинка, установленного на лыже при помощи устройства крепления в соответствии с настоящим изобретением.
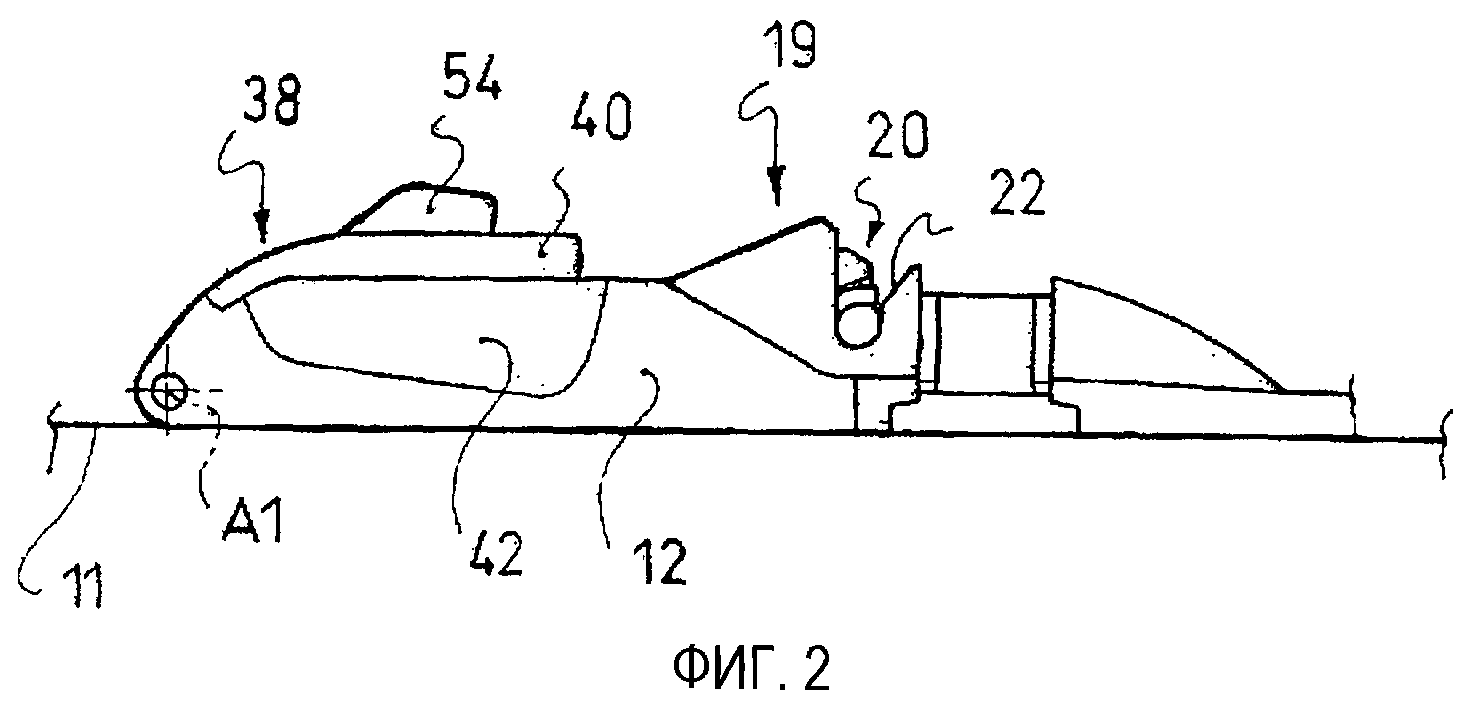
Фиг.2 - вид сбоку передней части устройства крепления, показанного на фиг.1.
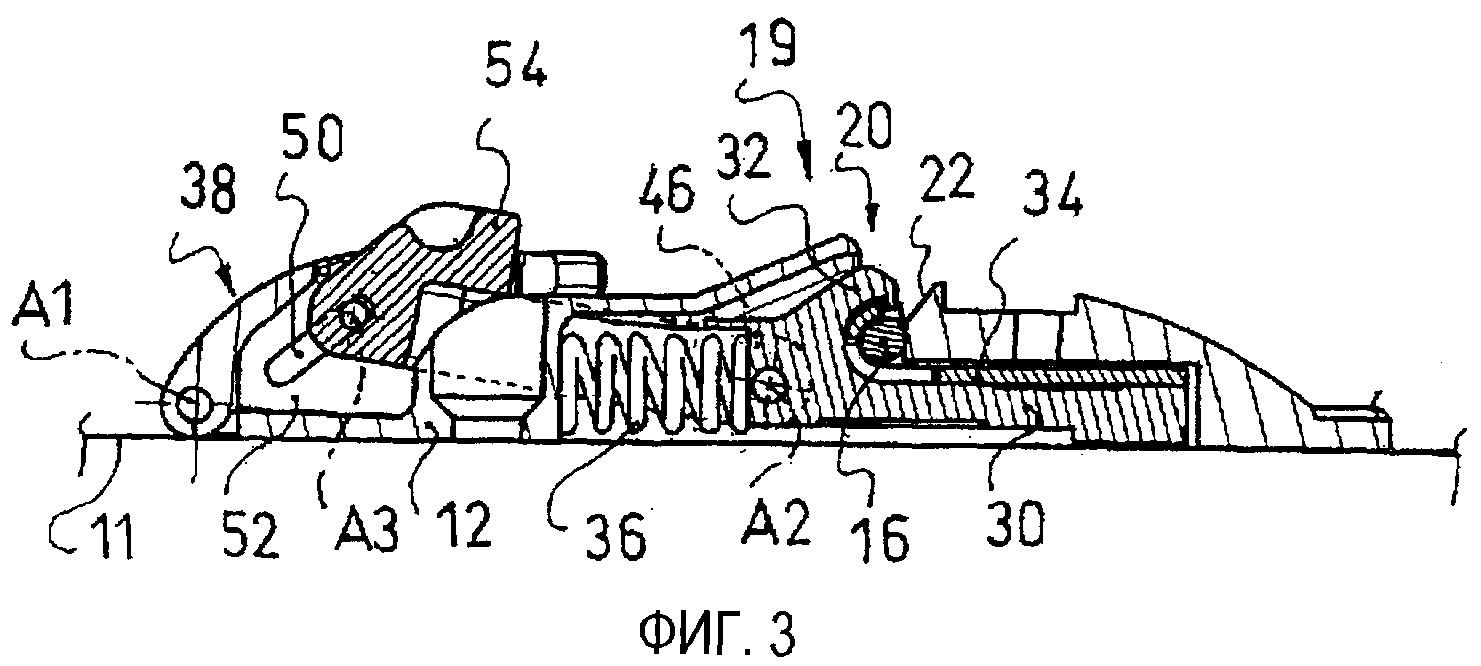
Фиг.3 - вид в продольном разрезе этой передней части.
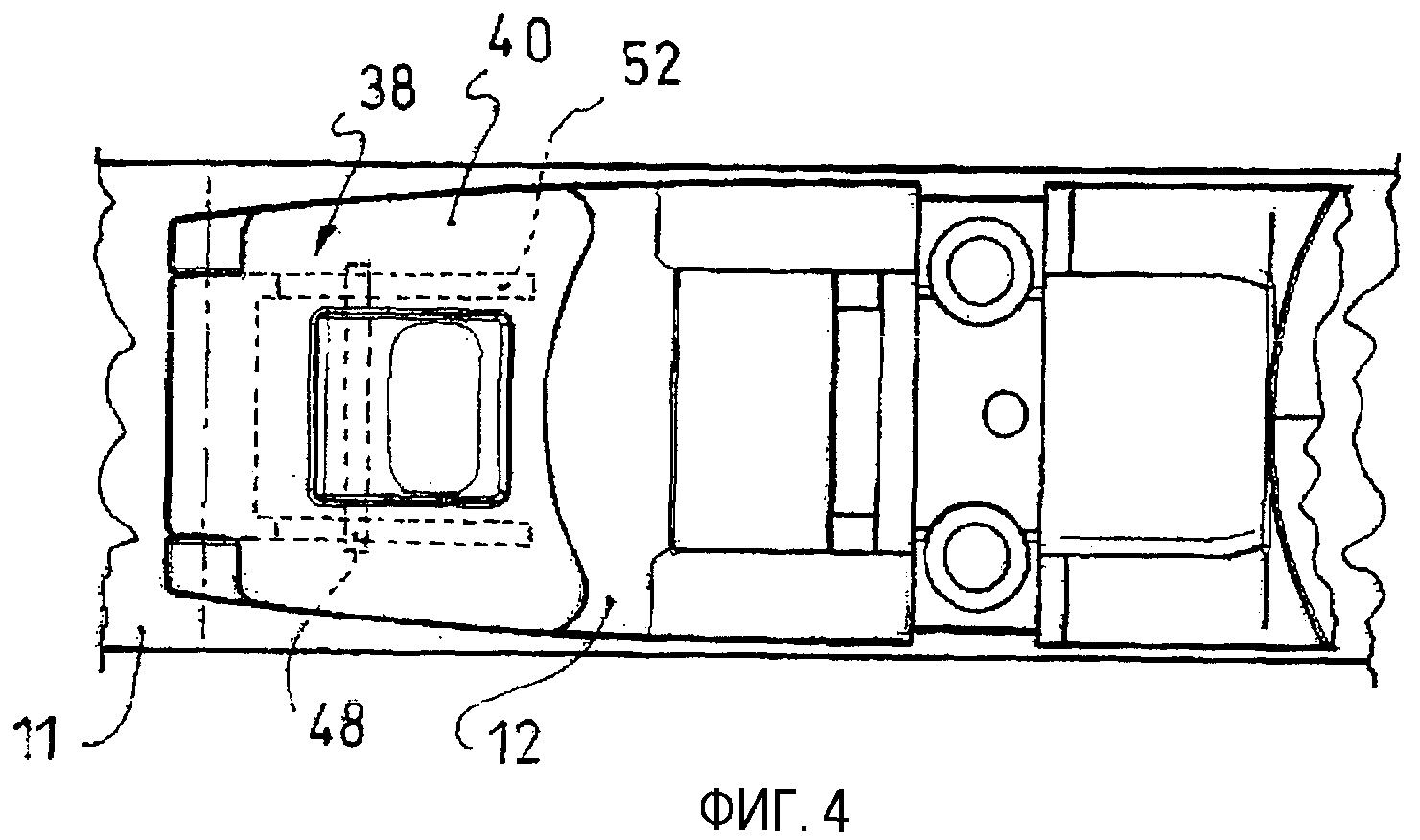
Фиг.4 - вид сверху этой передней части.
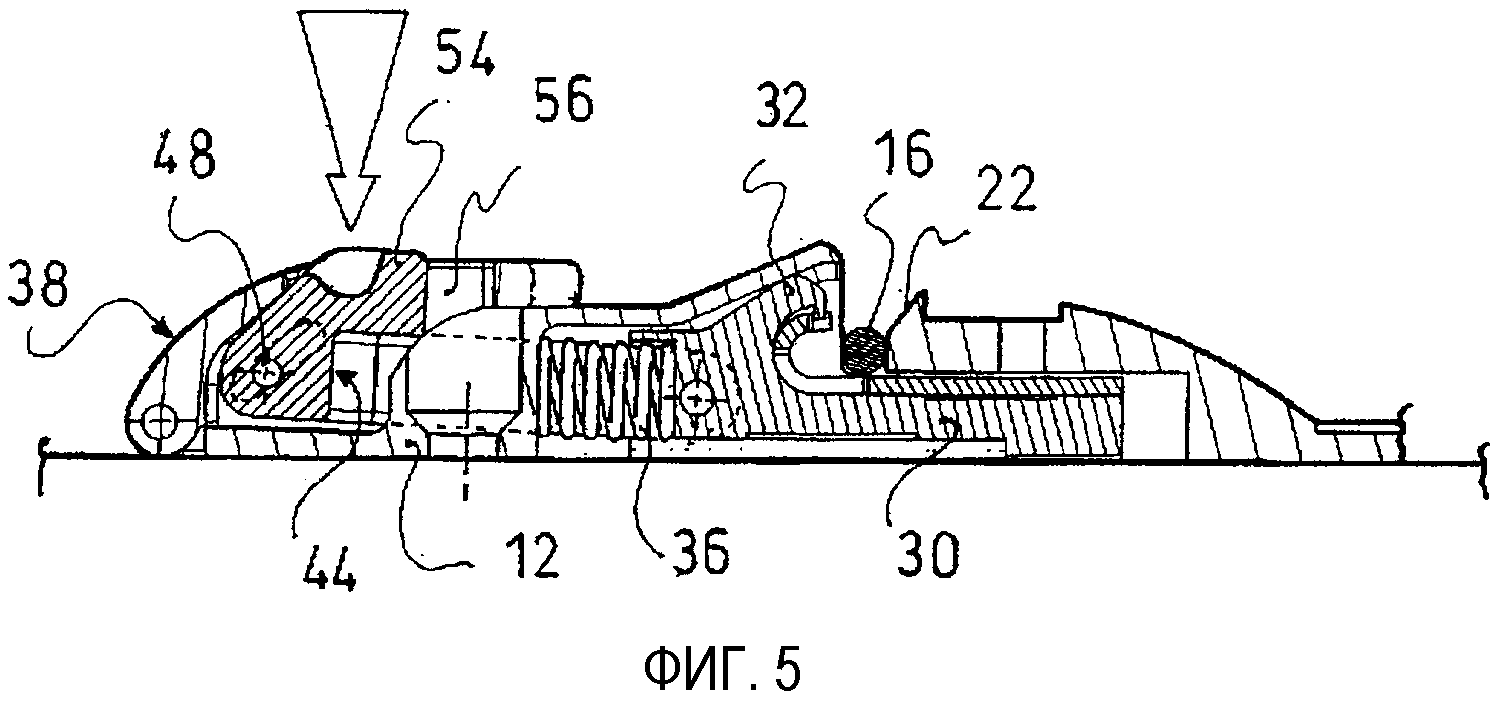
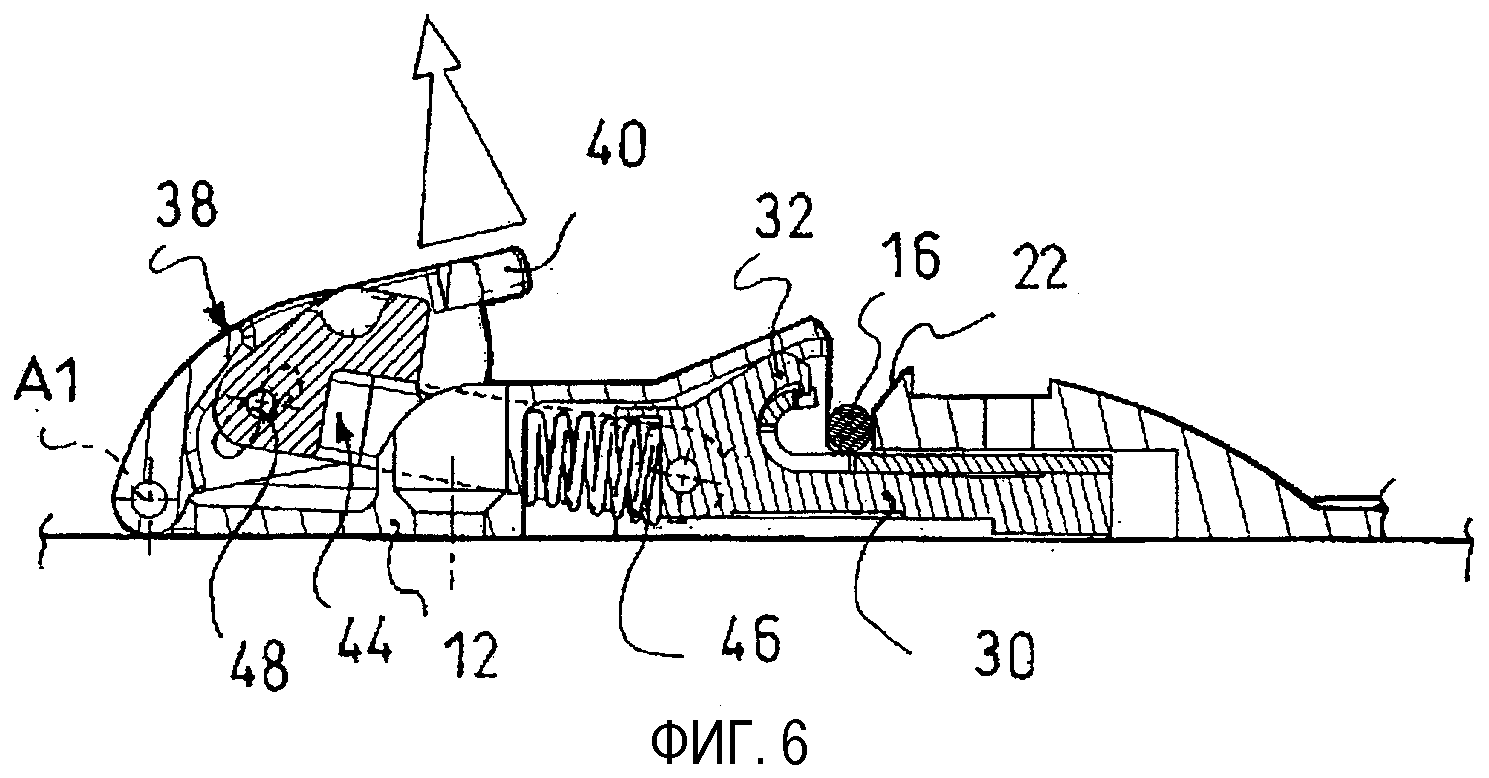
Фиг.5 и 6 - вид, аналогичный фиг.3, иллюстрирующий два направления управления устройством расцепления.
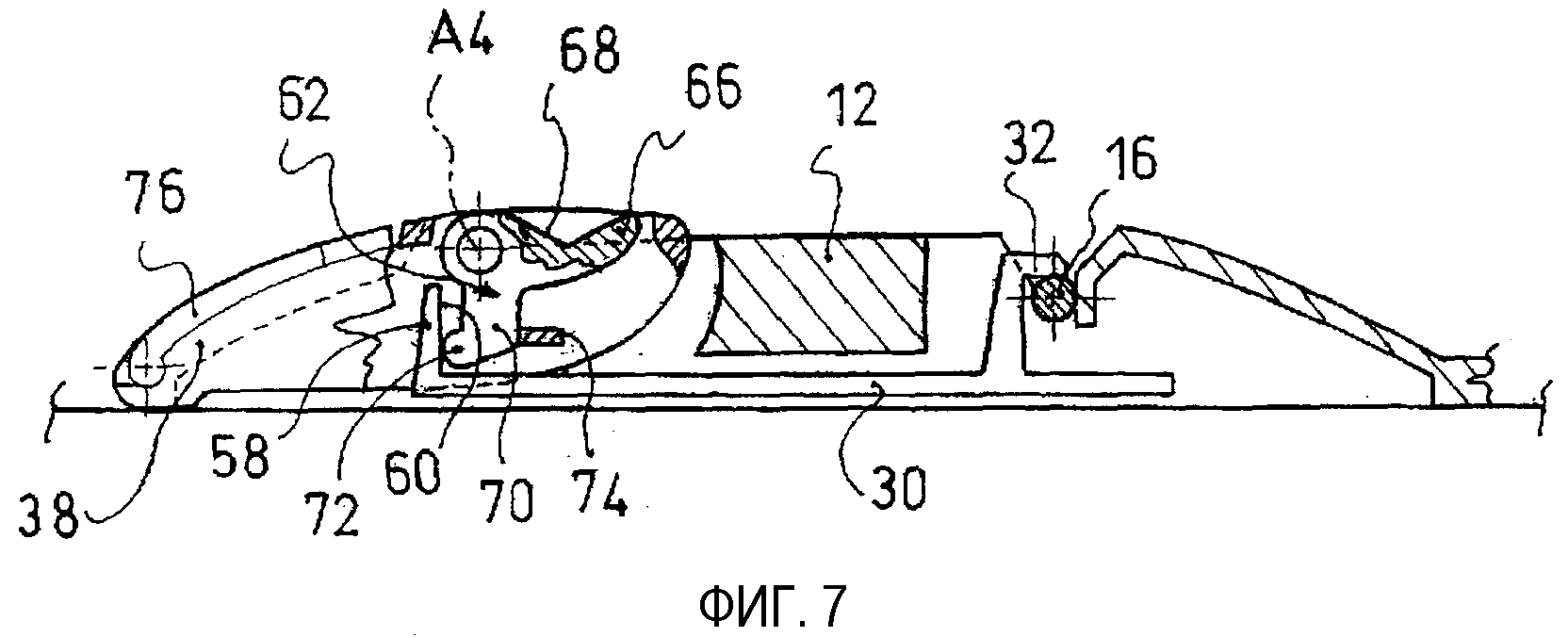
Фиг.7 - частичный схематичный вид в продольном разрезе второго варианта выполнения устройства крепления в соответствии с настоящим изобретением.
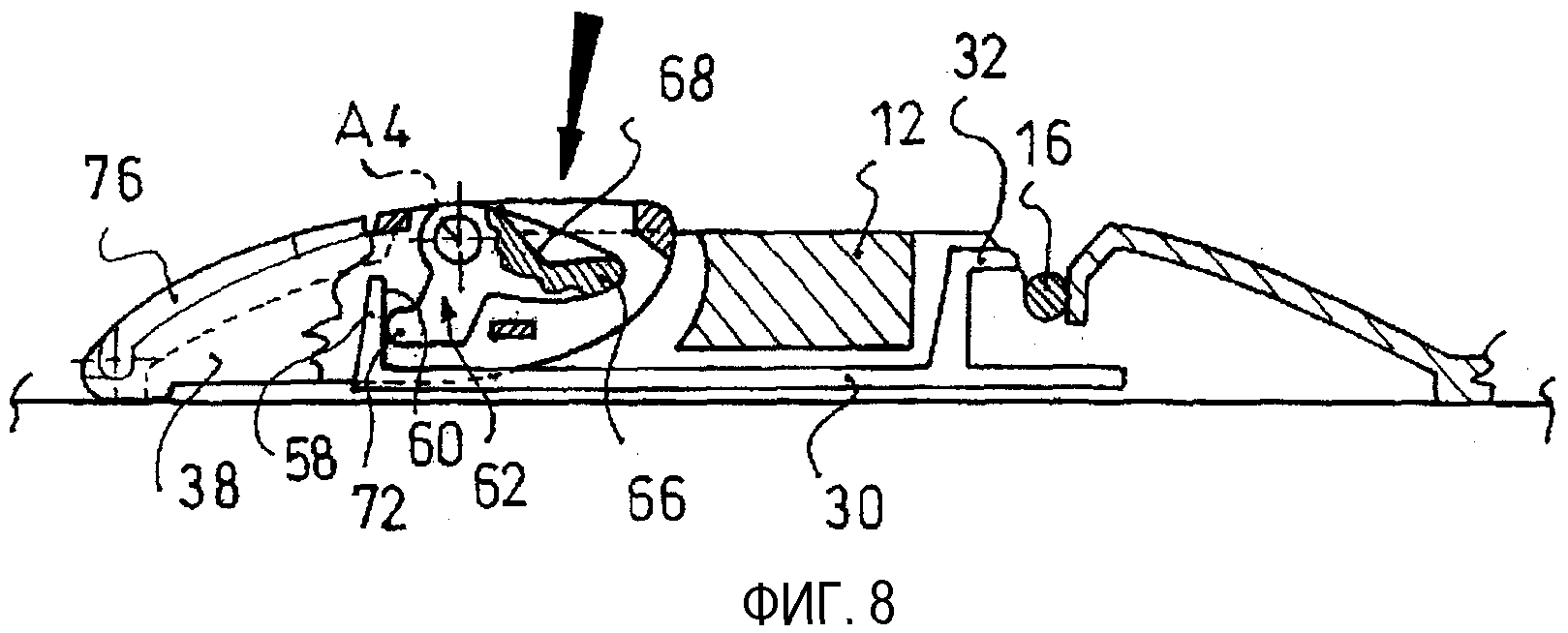
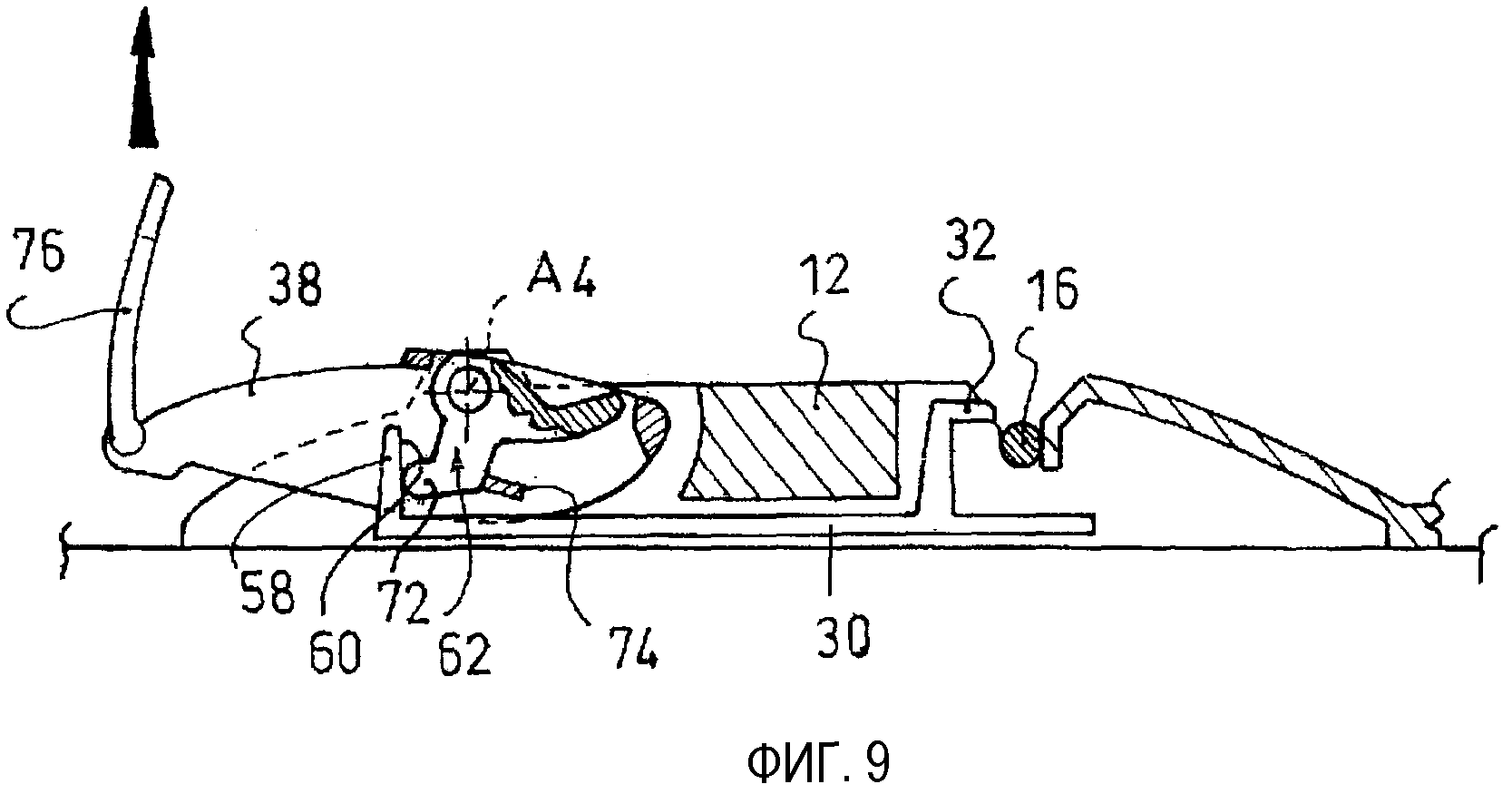
Фиг.8 и 9 - вид, аналогичный фиг.7, иллюстрирующий два направления управления устройством расцепления.
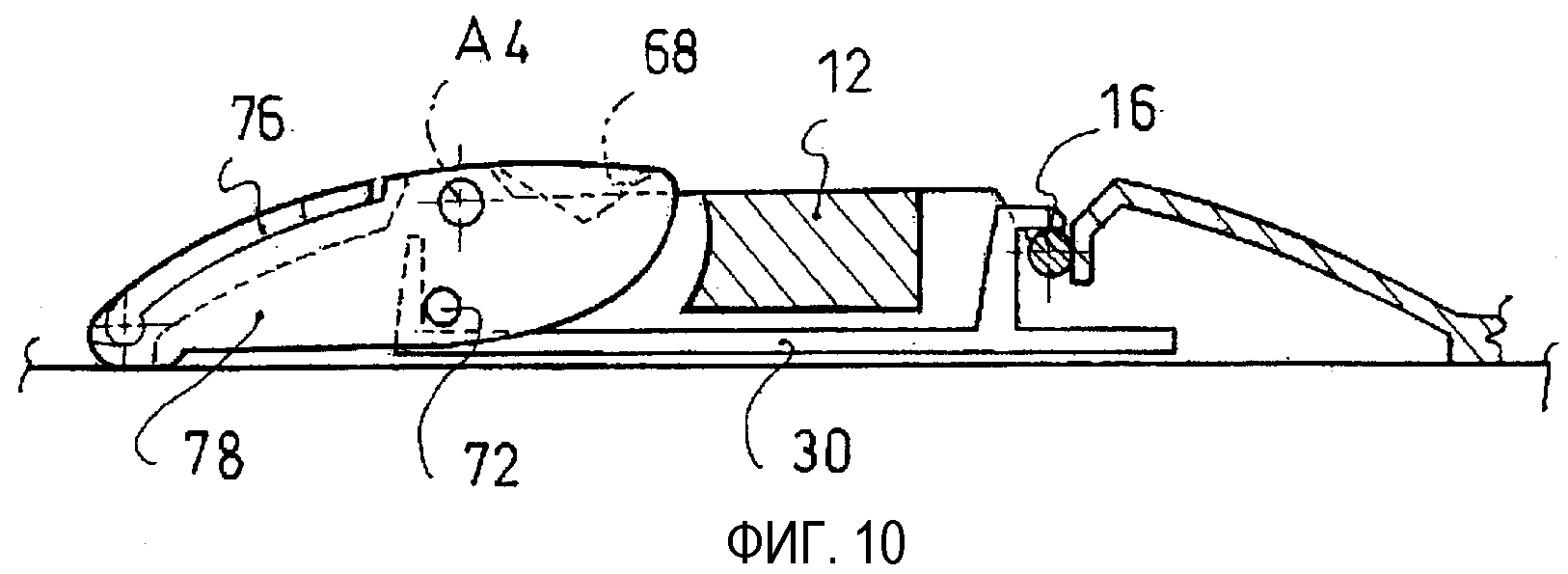
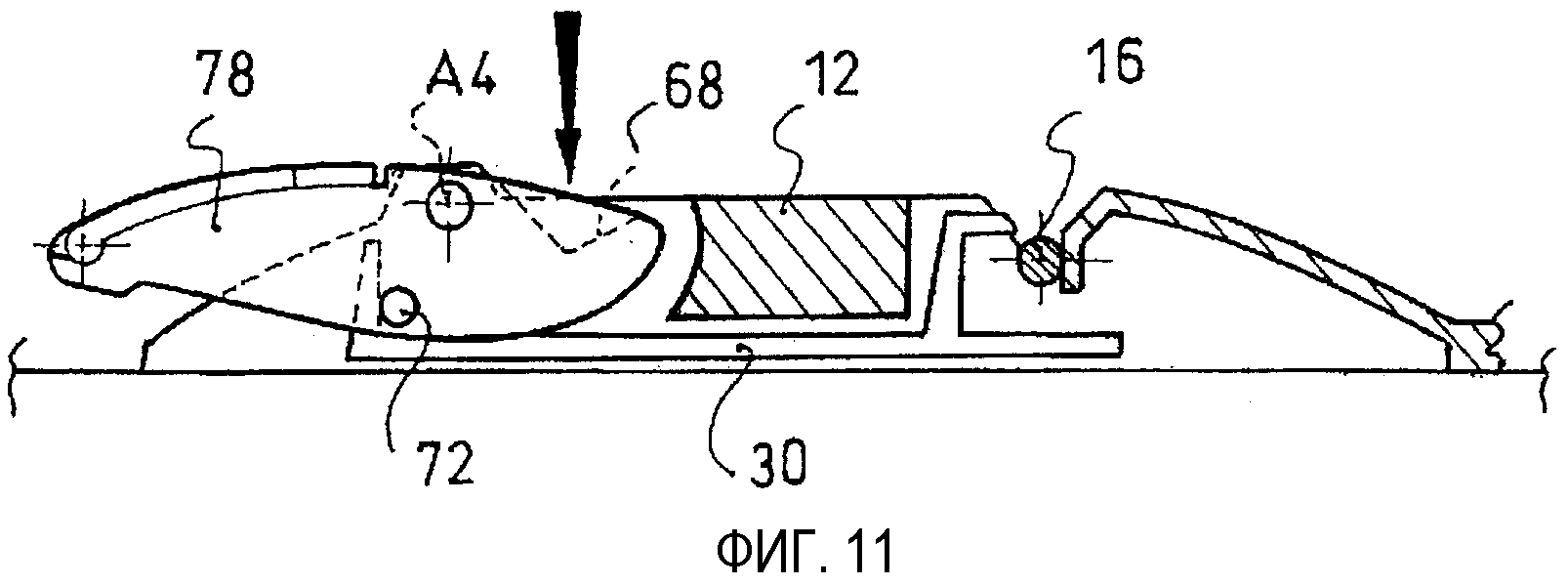
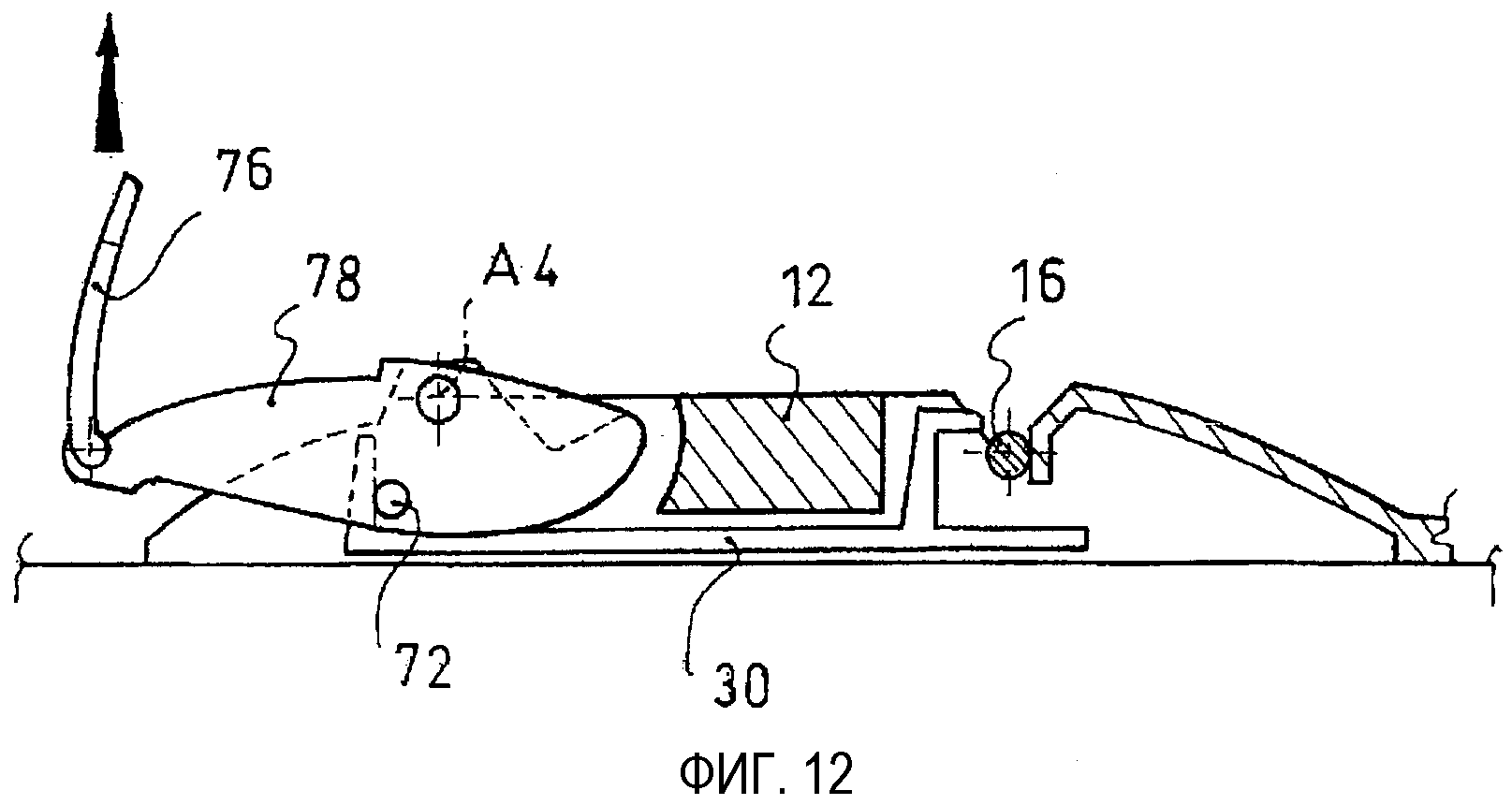
Фиг.10, 11 и 12 - вид, аналогичный фиг.7, 8 и 9, третьего варианта выполнения устройства в соответствии с настоящим изобретением.
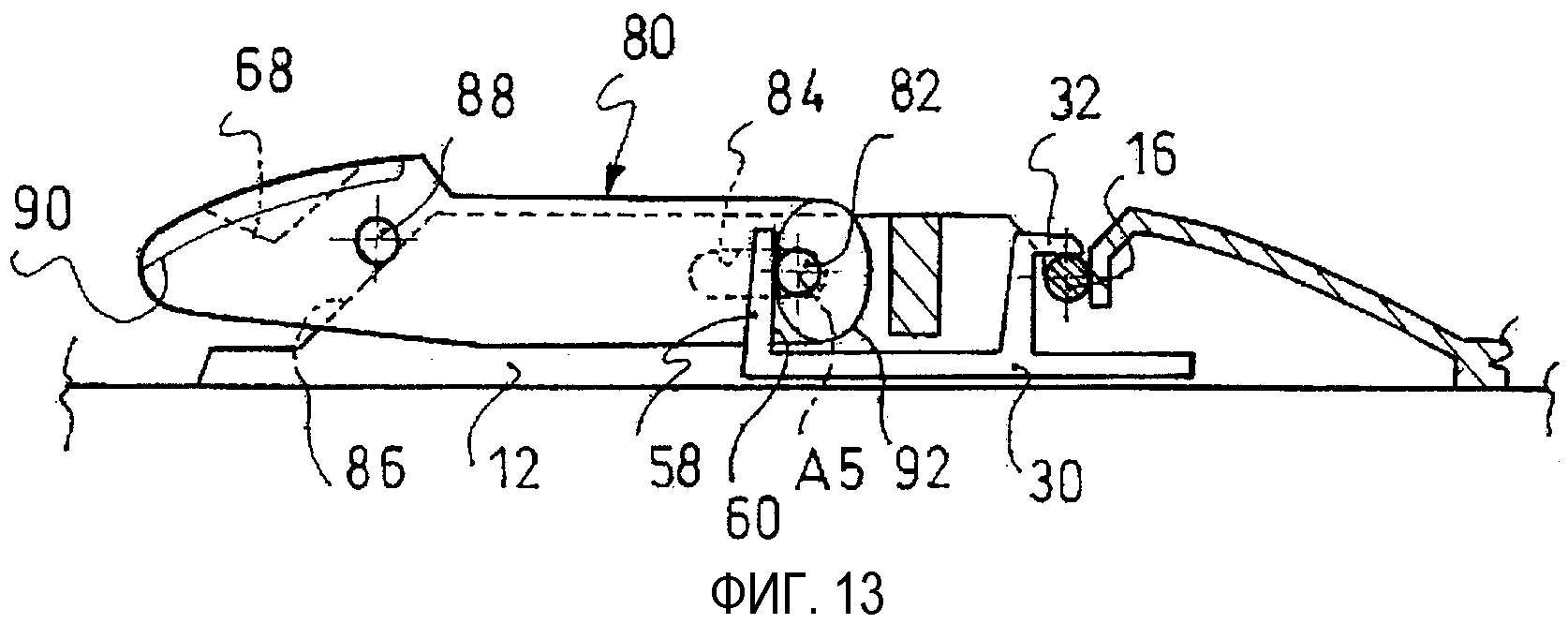
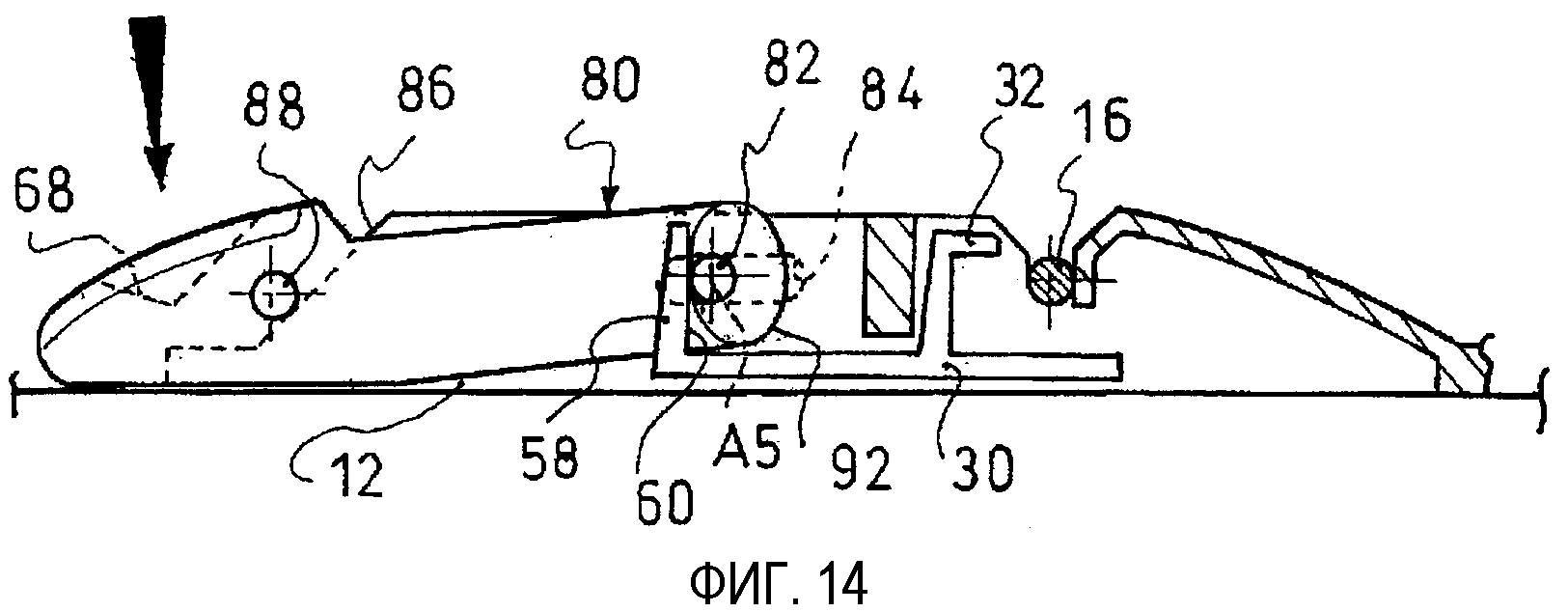
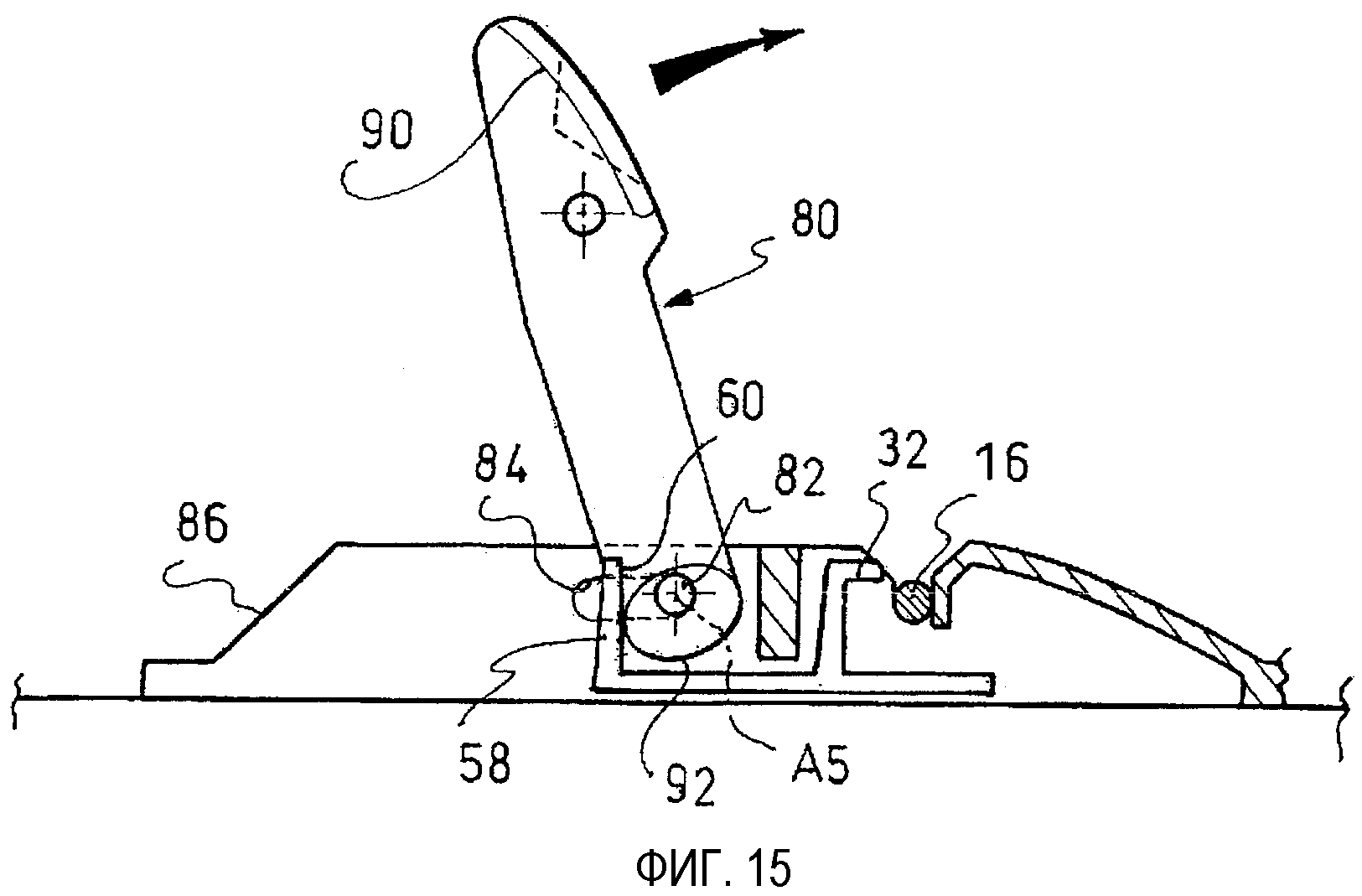
Фиг.13, 14 и 15 - вид, аналогичный фиг.7, 8 и 9, четвертого варианта выполнения устройства в соответствии с настоящим изобретением.
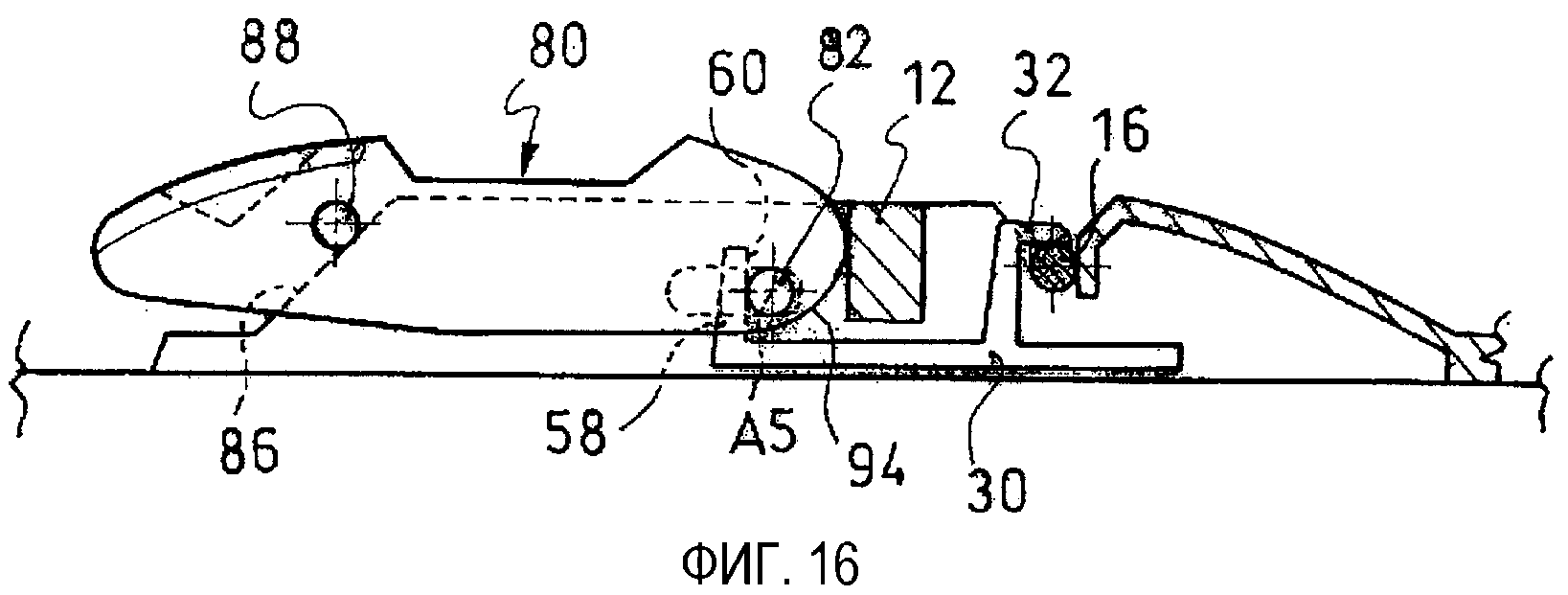
Фиг.16, 17 и 18 - вид, аналогичный фиг.7, 8 и 9, пятого варианта выполнения устройства в соответствии с настоящим изобретением.
Фиг.19, 20 и 21 - вид, аналогичный фиг.7, 8 и 9, шестого варианта выполнения устройства в соответствии с настоящим изобретением.
Далее следует описание настоящего изобретения в варианте его применения на беговых лыжах.
В первом варианте выполнения, показанном на фиг.1-6, устройство 10 крепления содержит платформу 12, предназначенную для закрепления на спортивном инвентаре 11, в данном случае на лыже, но которое может быть также непосредственно интегрировано в эту лыжу. Платформа 12 может быть также выполнена из нескольких частей, при этом некоторые из этих частей могут быть, в случае необходимости, также интегрированы в лыжу 11.
В показанном примере устройство предназначено для обеспечения крепления ботинка 14, содержащего соединительные средства из двух частей. Ботинок содержит два соединительных штыря 16, 18, установленных в подошве ботинка и находящихся на одном уровне с ее нижней поверхностью. Соединительные штыри такого типа описаны в патентах ЕР-A-913102 и ЕР-А-913103. Так, в данном случае речь идет о двух круглых цилиндрических штырях, установленных поперек продольной канавки, выполненной в нижней стороне подошвы. Передний штырь 16, например, находится рядом с передним концом подошвы, а задний штырь 18 смещен назад на определенное расстояние и находится на уровне зоны или перед зоной ботинка, соответствующей зоне плюсно-фалангового сгибания ступни пользователя. Такое расположение наиболее предпочтительно для беговых лыж, так как при использовании мягких ботинок оно обеспечивает сгибание ботинка вместе со сгибанием ступни. Вместе с тем, настоящее изобретение может применяться с другими соединительными узлами, имеющими другую геометрическую форму или конфигурацию, например, выполненными в виде штырей не круглого сечения, крюков, выступов или захватных пазов, выполненных непосредственно в материале подошвы, и т.д.
Как известно, передний штырь 16 предназначен для взаимодействия с запорным механизмом 19, содержащим подвижную щечку 20, выполненную в виде крюка, и поперечный борт 22 платформы, выполненный в виде неподвижной щечки, для поворотного крепления ботинка на лыже. После стопорения в запорной системе передний соединительный штырь 16 может свободно поворачиваться внутри щечки, обеспечивая, таким образом, шарнирное крепление переднего конца ботинка.
Задний штырь 18 предназначен для сцепления с упругой возвратной системой, встроенной в направляющую кромку 24 устройства. Такая упругая возвратная система описана, например, в патенте ЕР-768103, зарегистрированном на имя заявителя. Она содержит тягу 26, содержащую передний конец в виде крюка 28 (предназначенного для зацепления с задним штырем 18) и задний конец, соединенный с платформой 12 с возможностью скольжения в продольном направлении и с возможностью поворота вокруг поперечной оси. Упругие возвратные средства (не показаны) стремятся вернуть тягу 26 в положение покоя, показанное на фиг.1. Таким образом, когда пятка ботинка приподнимается при повороте ботинка вокруг его переднего штыря 16, тяга 26, шарнирно соединенная с задним штырем 18, может перемещаться вверх и вперед вместе с задним штырем 18, действуя при этом на последний возвратным усилием, стремящимся прижать подошву ботинка к верхней стороне лыжи.
Настоящее изобретение может также применяться для устройств, содержащих другие упругие возвратные средства, например, содержащие спереди устройства крепления упругий буфер, в который упирается передний конец ботинка, когда его пятка приподнимается. В этом случае ботинок может содержать только один соединительный стержень.
На фиг.2-6 показано запорное устройство 19 для зацепления с передним штырем 16 ботинка. Для большей ясности на фиг.3, 5 и 6 показан только штырь 16 ботинка. Принцип работы запорного механизма хорошо известен из предшествующего уровня техники (например, в системах, выпускаемых заявителем под названием «SNS Profil Auto») и описан в настоящей заявке только в качестве информации, при этом следует иметь в виду, что изобретение может применяться и с другими типами запорных механизмов.
Как было указано выше, запорный механизм 19 в основном содержит каретку 30, выполненную с возможностью перемещения в продольном направлении между задним положением сцепления (показанным на фиг.3) и передним положением расцепления (фиг.5 и 6). Каретка, выполненная, например, путем формования из пластического материала, содержит верхний крюк 32, загнутый вверх и назад. Каретка может также содержать металлическое усиление 34, защищающее внутреннюю сторону крюка 32, образующую гнездо для переднего штыря ботинка. Действительно, когда каретка 30 находится в заднем положении, крюк 32 находится напротив поперечного борта 22 платформы 12, ограничивая вместе с ним гнездо, открытое в поперечном направлении с двух концов для захождения в него штыря 16. Когда штырь 16 заходит в гнездо и каретка находится в заднем положении, штырь запирается в гнезде и может лишь поворачиваться вокруг своей оси. Когда же каретка 30 переходит в свое переднее положение, гнездо открывается сверху, позволяя штырю выйти из гнезда или зайти в него.
Варианты выполнения устройств 10 крепления, описание которых следует ниже, содержат запорные механизмы автоматического сцепления. Действительно, можно отметить, что запорный механизм содержит пружину 36 сжатия, опирающуюся, с одной стороны, на платформу 12 и, с другой стороны, на каретку 30, толкая последнюю в заднее положение сцепления. Кроме того, необходимо отметить, что крюк 32 каретки и поперечный борт 22 платформы содержат участки в виде наклонных площадок, образующих V-образный профиль. Таким образом, пользователь может установить передний штырь 16 ботинка в положение упора в наклонные площадки крюка и поперечного борта платформы и простым вертикальным нажатием на площадки передвинуть крюк вперед, преодолевая усилие пружины 36. Как только каретка 30 продвинется вперед на достаточное расстояние, стержень 16 может зайти в гнездо, и пружина 36 может вернуть каретку 30 в положение сцепления, в котором крюк 32 не дает штырю выйти из гнезда. Такой запорный механизм автоматического сцепления является более предпочтительным, так как он обеспечивает сцепление ботинка с устройством крепления без специального вмешательства пользователя в отличие от других запорных механизмов, в которых сцепление ботинка требует одной или нескольких ручных операций управления со стороны пользователя.
Как известно, устройство крепления содержит систему расцепления, приводимую в действие пользователем для обеспечения расцепления запорного механизма. Однако, согласно отличительному признаку настоящего изобретения, система расцепления, описанная ниже, выполнена с возможностью приведения в действие как непосредственно, так и опосредованно, по меньшей мере, в двух разных направлениях для обеспечения расцепления механизма.
В описанных примерах расцепление запорного механизма требует перемещения каретки 30 в продольном направлении вперед из ее заднего положения сцепления в переднее положение расцепления. Разумеется, что с другими запорными механизмами управление расцепления может потребовать обеспечивать другие перемещения подвижной детали (поступательное движение, поворотное движение или их комбинация) и/или такого же типа перемещения, но в другом направлении.
В первом примере осуществления настоящего изобретения механизм расцепления выполнен на переднем конце устройства крепления и содержит два отдельных узла управления, каждый из которых приводится в действие в одном из по меньшей мере двух направлений управления.
Первым узлом управления является рычаг 38, шарнирно соединенный своим передним шарнирным концом с платформой 12 вокруг поперечной оси А1. Рычаг продолжен захватной планкой 40, которая в положении покоя, показанном на фиг.2-4, расположена по существу горизонтально в направлении задней части над платформой 12. На боковых сторонах платформа содержит углубления 42, обеспечивающие руке пользователя легкий доступ к боковым краям захватной планки 40 рычага 38.
Второй узел управления выполнен в виде колодки 44, задний конец которой соединен с кареткой 30 при помощи шарнирного стержня 46 с поперечной осью А2. Шарнирный стержень 46 жестко соединяет колодку 44 с кареткой 30 с возможностью их поступательного движения. Передний конец колодки 44 соединен с рычагом 38 при помощи соединительного стержня 48 с поперечной осью А3. Стержень 48 насквозь проходит через передний конец колодки 44 в поперечном направлении и содержит два поперечных концевых участка, заходящих в пазы 50, выполненные в параллельных плечах 52 рычага 38, которые расположены вертикально и в продольном направлении под захватной планкой 40. Следует отметить, что передняя часть колодки 44 в поперечном направлении обрамлена двумя плечами 52, и что два паза 50 наклонены вперед и вниз под углом примерно 45 градусов. Таким образом, соединительный стержень 48 соединяет колодку 44 и рычаг 38 и способствует относительному перемещению этих двух элементов поступательным движением и поворотным движением.
Кроме того, колодка 44 в своей передней части содержит головку 54, направленную вверх и выступающую наружу через отверстие 56, выполненное в центре захватной планки 40 рычага 38.
В состоянии покоя, показанном на фиг.2-6, рычаг 38 опирается в нижнем положении на платформу, тогда как колодка 44 под действием пружины 36 и каретки 30 находится в заднем верхнем положении, в котором соединительный стержень 48, соединенный с колодкой 44, по существу заходит в задний верхний конец наклонных пазов 50 рычага 38.
Согласно изобретению пользователь может осуществить расцепление запорного механизма при помощи двух разных действий.
Во-первых, как показано, в частности, на фиг.5, пользователь может воздействовать на головку 54 колодки 44 по существу вертикальным нажатием сверху вниз, например, рукой или концом лыжной палки (использование лыжной палки позволяет ему открыть устройство, не наклоняясь). Под действием этого нажатия соединительный стержень 48, соединенный с колодкой 44, перемещается со скольжением в пазах 50 рычага 38. Действительно, последний остается в этом случае неподвижным, так как он упирается в платформу 12. Перемещаясь со скольжением в наклонных пазах 50, соединительный стержень 48 трансформирует вертикальное усилие, производимое пользователем, в комбинированное движение колодки 44 (наподобие кулачковой системы), при этом указанное движение является сочетанием продольного поступательного движения вперед и поворотного движения вокруг оси А2 (против часовой стрелки на чертежах). Поскольку колодка 44 и каретка 30 соединены поворотной связью, составляющая продольного поступательного движения колодки 44 непосредственно передается на каретку 30, которая, таким образом, перемещается в свое переднее положение расцепления. Разумеется, что, как только пользователь прекращает прикладывать усилие к головке 54 колодки 44, пружина 36 возвращает колодку 44 в ее положение покоя и одновременно каретку 30 в ее заднее положение сцепления.
Во-вторых, как показано на фиг.6, пользователь может взяться рукой за захватную планку 40 рычага 38 и поднять ее вверх, осуществляя, таким образом, поворот рычага вокруг оси А1 (против часовой стрелки на чертежах). При таком поворотном движении пазы 52 плеч 54 рычага 38 увлекают за собой соединительный стержень 48, жестко соединенный с колодкой 44. Таким образом, колодка 44 принудительно перемещается вперед, увлекая за собой каретку 30 и перемещая ее в переднее положение расцепления. Как и в первом случае расцепления, как только пользователь отпускает рычаг 38, пружина 36 возвращает каретку 30 и колодку 44 в положение покоя, при этом последняя, действуя через соединительный стержень 48, возвращает рычаг 38 в его исходное положение.
Таким образом, в соответствии с настоящим изобретением управление системой расцепления может быть осуществлено двумя способами. При первом способе используют нажатие, по существу направленное вниз. Второй способ состоит в применении тягового усилия, по существу направленного вверх. Пользователь может в любой момент выбрать способ управления расцеплением механизма, который он считает для себя наиболее практичным.
В первом примере выполнения, когда колодку 44 перемещают вниз, она непосредственно управляет расцеплением запорного механизма, а когда рычаг 38 перемещают вверх, он управляет расцеплением механизма через колодку 44, то есть опосредованно. Кроме того, необходимо отметить, что оба узла управления перемещаются разными движениями. Необходимо также отметить, что запорный механизм и его система расцепления используют общий упругий возвратный элемент, в данном случае пружину 36.
Далее следует краткое описание других вариантов выполнения настоящего изобретения со ссылками на чертежи, иллюстрирующие различные возможные системы управления расцеплением. Эти примеры выполнения описаны в рамках устройств крепления, запорный механизм которых выполнен в виде скользящей каретки, которая была описана более подробно выше. Несмотря на то что могут быть предусмотрены и другие механизмы, заявитель ограничился кратким и схематичным описанием, при этом идентичные или аналогичные элементы, описанные выше, могут быть обозначены теми же цифровыми позициями. В частности, для облегчения изложения на этих принципиальных схемах не показаны системы упругого возврата запорного механизма и/или узлов управления его расцеплением. Специалист без труда сможет адаптировать известные возвратные системы, например, аналогичные описанной выше системе с пружиной 36.
Второй вариант осуществления настоящего изобретения, показанный на фиг.7-9, тоже содержит два отдельных узла управления расцеплением, но, в отличие от первого варианта выполнения, эти два узла приводятся в действие пользователем при помощи одного и того же движения, в данном случае при помощи поворотного движения.
Так, каретка 30 запорного механизма содержит продолжение в переднем направлении, заканчивающееся приподнятым носиком 58, содержащим по существу вертикальную и направленную назад опорную поверхность 60.
Система расцепления содержит рычаг 38, шарнирно установленный на платформе 12 вокруг поперечной оси А4. На рычаге и/или платформе вокруг этой же оси шарнирно установлено коромысло 62. В случае необходимости, оно может быть шарнирно установлено на оси, смещенной по отношению к оси А4.
Коромысло 62 содержит два по существу перпендикулярных плеча, выполненных по существу радиально, начиная от оси А4.
Верхнее плечо 66 расположено по существу горизонтально в заднем направлении и содержит верхнюю сторону 68, на которую пользователь может действовать вертикальным нажатием сверху вниз, например, при помощи лыжной палки. Нижнее плечо 70 по существу направлено вниз и содержит приводной выступ 72, опирающийся в переднем направлении в опорную поверхность 60 приподнятого носика 58 каретки 30. Когда пользователь нажимает на верхнее плечо 66, 68 сверху вниз (см. фиг.8), это приводит к повороту коромысла 62 вокруг его оси А4 (по часовой стрелке на чертежах), при этом выступ 72 коромысла 62 толкает приподнятый носик 58 каретки вперед до переднего положения расцепления.
Кроме того, необходимо отметить, что для ограничения поворота коромысла 62 в одном из двух направлений выполняют упор 74.
Когда пользователь берется за передний конец рычага 38 и поднимает его вверх (см. фиг.9), это приводит к повороту рычага 38 вокруг оси А4, а также к повороту, через упор 74, коромысла 62, которое, как было показано выше, перемещает вперед каретку 30. В показанном примере рычаг 38 содержит откидную тягу 76, облегчающую захват и управление рычагом. Вместе с тем, данная тяга 76 является вариантом выполнения и может быть заменена шнурком или рычагом особой геометрической формой, либо вовсе исключена, так как она не является отдельным узлом управления рычага.
В этом варианте выполнения, показанном на фиг.7-9, система расцепления содержит два узла управления: коромысло 62, непосредственно управляющее расцеплением запорного механизма, независимо от любого перемещения второго узла управления, и рычаг 38, управляющий механизмом опосредованно через коромысло 62.
Третий вариант осуществления настоящего изобретения показан на фиг.10-12, и в нем система расцепления запорного механизма содержит только один узел управления. Как показано на чертежах, система аналогична предыдущей, единственное ее отличие состоит в том, что рычаг и коромысло выполнены в виде единой детали, а именно в виде коромысла 78, шарнирно установленного на платформе 12 вокруг оси А4 и содержащего, с одной стороны, верхнюю опорную поверхность 68, находящуюся сзади оси А4, и, с другой стороны, передние захватные средства (в данном случае тягу 76), находящиеся спереди оси А4, при этом для осуществления поворотного движения коромысла 78 пользователь может по своему усмотрению либо нажать сверху вниз на заднюю поверхность 68, либо потянуть вверх за передние захватные средства 76. В обоих случаях коромысло поворачивается вокруг оси А4 и через приводной выступ 72 заставляет каретку 30 перемещаться поступательно вперед.
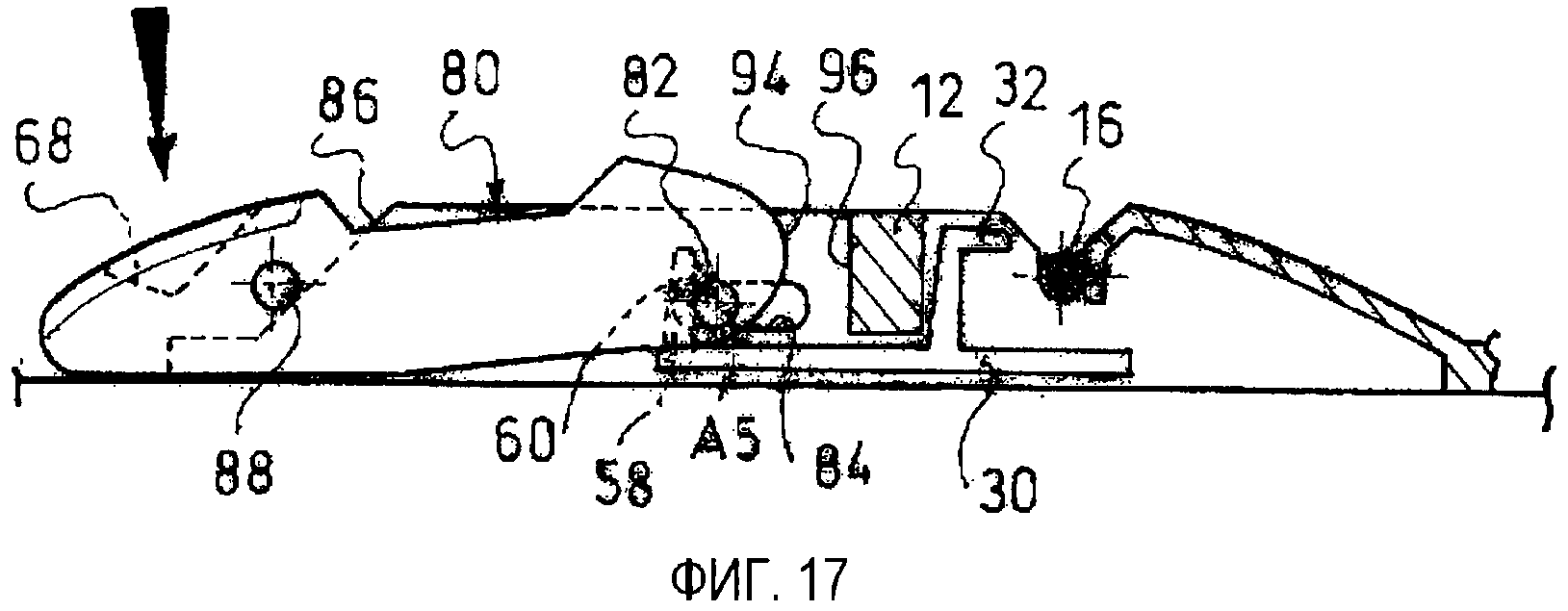
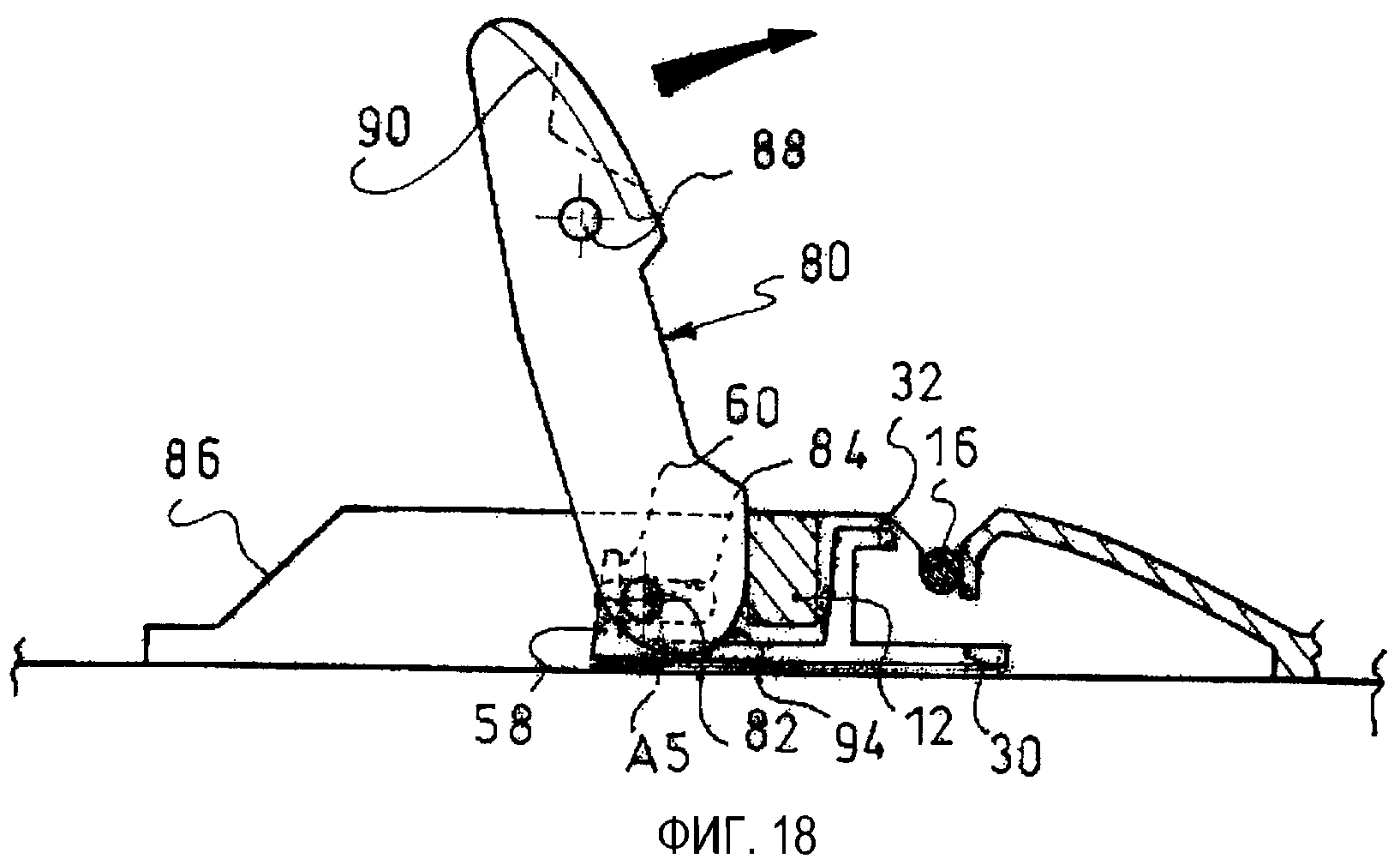
Четвертый и пятый варианты осуществления настоящего изобретения, описанные со ссылками соответственно на фиг.13-15 и 16-18, также содержат единый узел управления расцеплением запорного механизма, который согласно изобретению выполнен с возможностью приведения в действие по двум разным независимым направлениям управления для расцепления механизма. Однако, в отличие от предыдущего варианта, оба направления управления соответствуют движениям запорного узла, имеющим разный характер.
Так, в обоих случаях узлом управления является рычаг 80, соединенный с платформой 12 при помощи соединительного стержня 82. Этот соединительный стержень 82 с поперечной осью А5 жестко соединен с задним концом рычага 80 и заходит в паз 84 платформы 12 (или в несколько параллельных пазов). Паз 84 выполнен по существу прямолинейным и вытянутым в продольном направлении таким образом, чтобы соединение между рычагом 80 и платформой 12 позволяло рычагу поворачиваться вокруг оси А5 и перемещаться поступательно в продольном направлении. Кроме того, рычаг 80 опирается своим передним концом на наклонную грань 86 платформы. Наклонная грань 86 является поверхностью, обращенной вверх и вперед, и следовательно, ее профиль наклонен вниз и вперед. Рычаг содержит, например, штифт или ролик 88, входящий в контакт с наклонной гранью 86. Кроме того, на своем переднем конце рычаг 80 содержит верхнюю опорную поверхность 68, на которую пользователь может нажимать по существу в вертикальном направлении вниз, при этом боковые края 90 образуют захватные средства, при помощи которых пользователь может взяться за передний конец рычага, чтобы поднять его вверх. Таким образом, можно отметить, что рычаг 80 соединен с платформой при помощи соединения, имеющего, по меньшей мере, две степени свободы.
В четвертом варианте выполнения, показанном на фиг.13-15, на своем заднем конце рычаг содержит эксцентриковый кулачок 92, установленный вокруг оси А5 и приходящий в положение упора в заднюю опорную поверхность 60 приподнятого носика 58, находящегося спереди каретки 30. Эксцентриситет этого кулачка 92 рассчитан таким образом, что, когда пользователь поднимает рычаг 80 вверх за его конец, рычаг 80 поворачивается вокруг оси А5 соединительного стержня 82, и поверхность кулачка 92 толкает каретку 30 вперед (см. фиг.15). Следует отметить, что рычаг 80 в этом случае не может поступательно перемещаться назад относительно платформы 12, так как соединительный стержень 82 блокируется в заднем направлении задним концом паза 84. В этом случае движение рычага является только поворотным.
Когда пользователь нажимает вниз на опорную поверхность 68 рычага, штифт 88 стремится к перемещению скольжением по наклонной грани 86, заставляя рычаг 80 перемещаться поступательно вперед (за счет кулачкового эффекта). Это поступательное движение обеспечивается за счет того, что соединительный стержень 82 может поступательно перемещаться вперед в пазу 84. Поступательное перемещение рычага 80 сопровождается легким поворотом рычага вокруг оси А5, но именно общее поступательное движение рычага 80 в основном заставляет, через поверхность кулачка 92, каретку 30 перемещаться вместе с ним.
Пятый вариант выполнения, показанный на фиг.16-18, отличается от предыдущего только тем, что стержень 82 находится в контакте с задней поверхностью приподнятого носика 58 каретки 30, и тем, что рычаг содержит заднюю поверхность, образующую кулачок 94, приходящий в положение упора в соответствующую контактную поверхность 96 платформы 12.
Когда пользователь нажимает на верхнюю опорную поверхность 68 рычага (см. фиг.17), рычаг 80 поступательно перемещается вперед, как и в предыдущем варианте выполнения, и увлекает за собой каретку 30, на этот раз через соединительный стержень 82.
Когда пользователь поднимает передний конец рычага 80 (см. фиг.18), кулачок 94, в зависимости от угла подъема, заставляет задний конец рычага поступательно перемещаться в горизонтальном направлении вперед. Это поступательное движение непосредственно передается на каретку 30 через соединительный стержень 82. В этом случае перемещение рычага является комбинированным поворотно-поступательным движением.
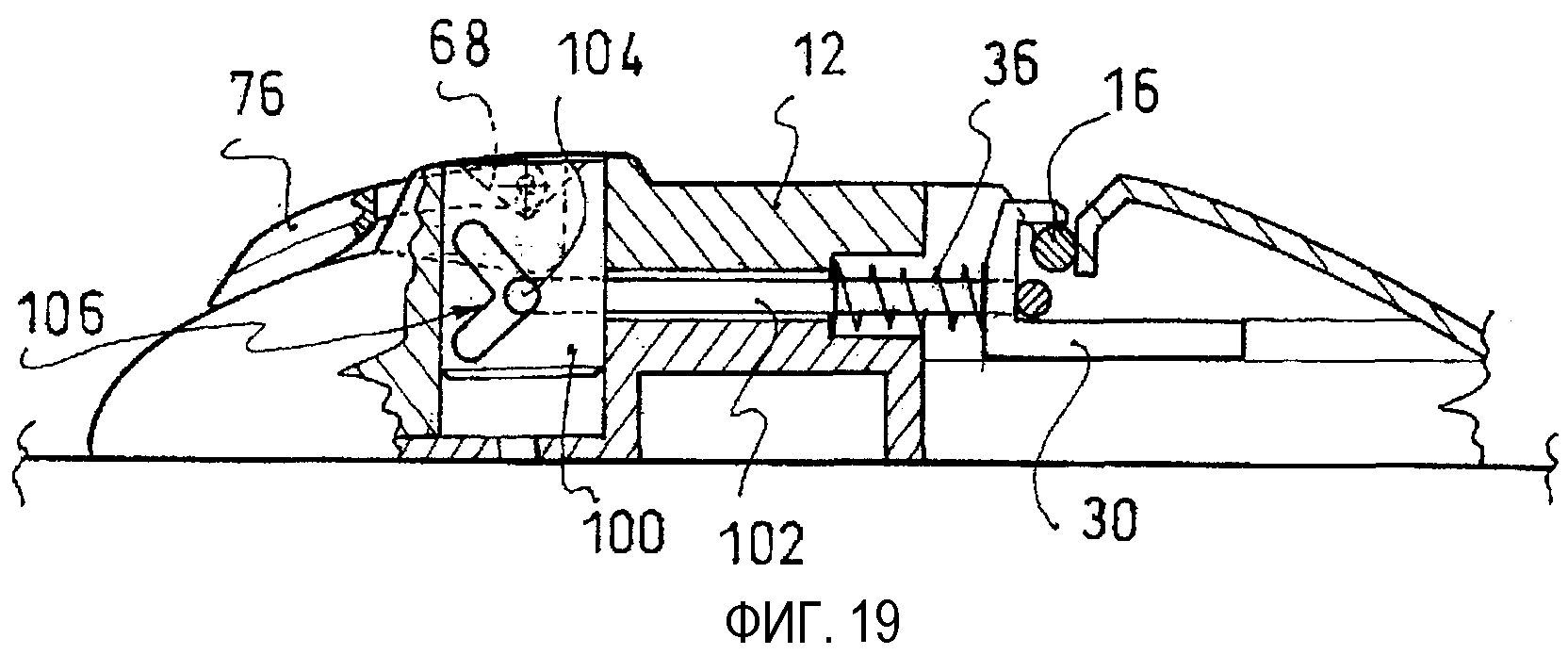
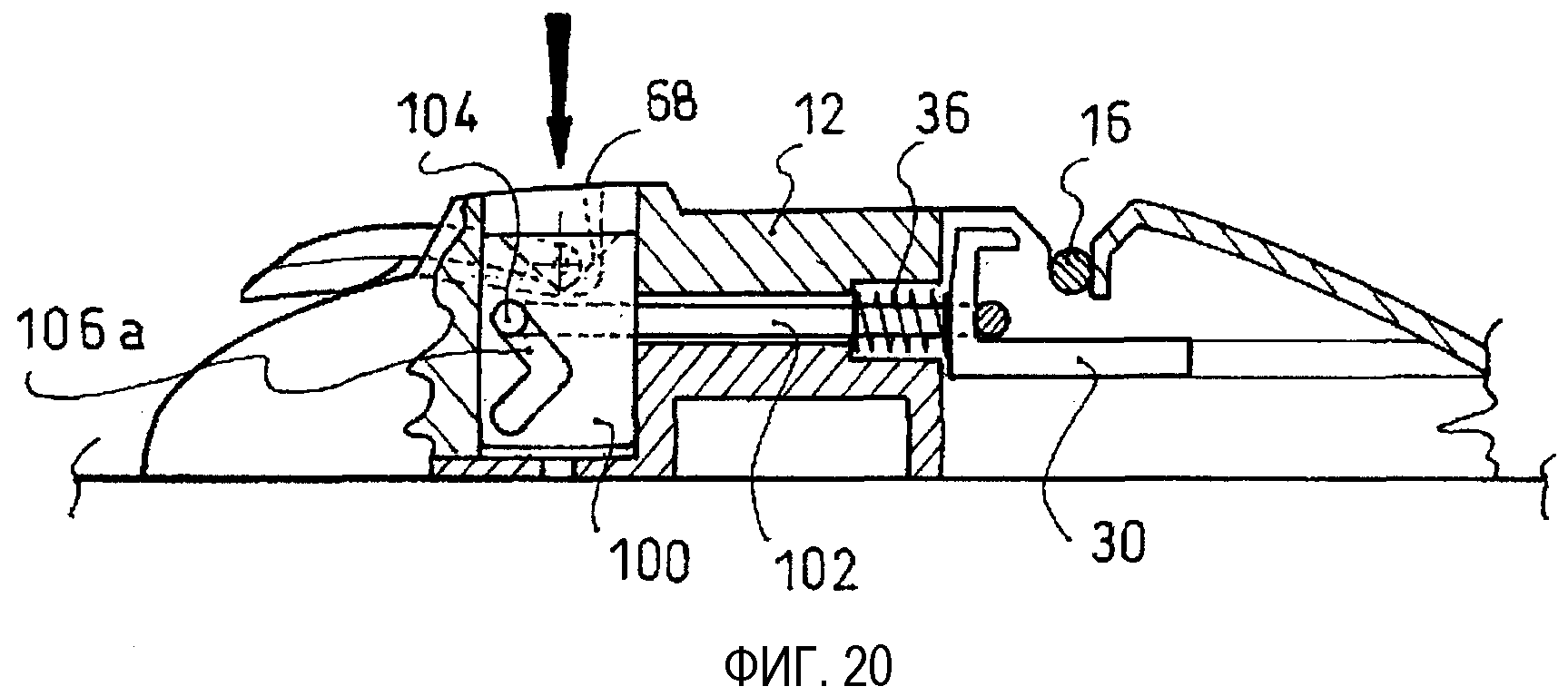
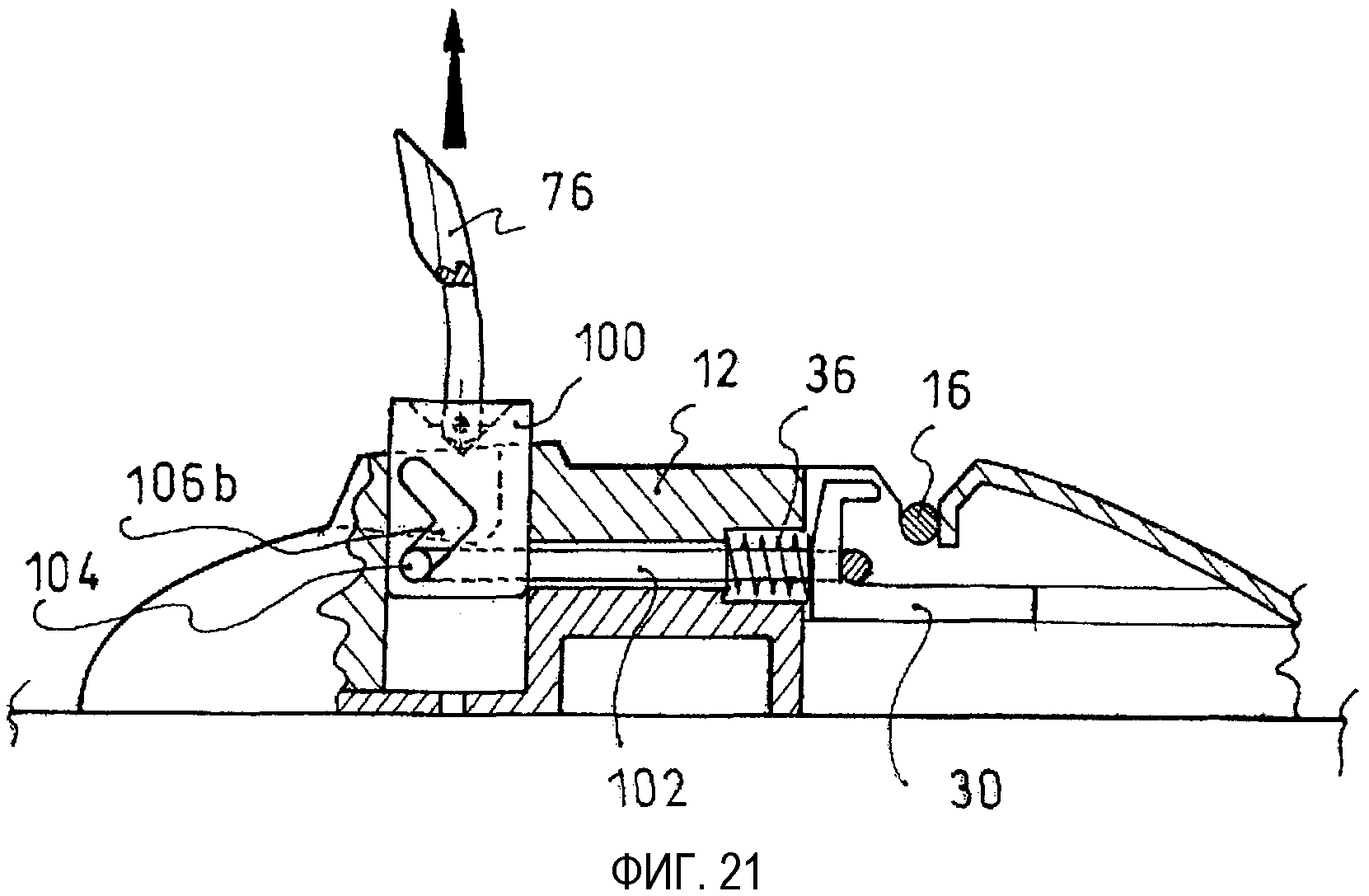
В шестом варианте выполнения настоящего изобретения, показанном на фиг.19-21, система расцепления содержит единый узел управления в виде ползунка 100, выполненного с возможностью поступательного движения в вертикальном направлении в платформе 12. Ползунок 100 занимает центральное положение сцепления (фиг.19) и два положения расцепления - нижнее и верхнее (фиг.20 и 21). Ползунок 100 соединен с кареткой 30 при помощи соединительного элемента 102, установленного в платформе 12 с возможностью перемещения только в продольном направлении. Передний конец соединительного элемента 102 содержит поперечный штифт 104, заходящий в паз 106, выполненный в ползунке 100. Паз 106 содержит две ветви: верхнюю ветвь 106а, направленную вверх и вперед, и нижнюю ветвь 106b, направленную вниз и вперед. Если смотреть сбоку, как показано на фигурах, паз 106 имеет V-образный профиль, вершина которого направлена в продольном направлении назад. Когда ползунок 100 находится в центральном положении, штифт 104 соединительного элемента находится в пазу 106 в пересечении двух ветвей, то есть в вершине V-образного профиля.
Когда пользователь нажимает сверху вниз на ползунок 100, штифт 104, который не может перемещаться вертикально, принудительно движется вперед по верхней ветви 106а паза (фиг.20), увлекая за собой вперед соединительный элемент 102 и каретку 30.
Когда пользователь поднимает ползунок 100 вверх, штифт 104 принудительно движется вперед по нижней ветви 106b паза (фиг.21), увлекая за собой соединительный элемент 102 и каретку 30.
Для управления ползунком 100 в нем предусмотрены, например, верхняя опорная поверхность 68 и откидная тяга 76.
Каждый из вариантов выполнения настоящего изобретения позволяет получить устройство крепления, управление которым остается эргономичным при любых обстоятельствах. В вариантах выполнения с двумя независимыми узлами управления достигают удобства в использовании и получают возможность наилучшей адаптации геометрической формы узла управления к каждому из двух способов управления. Так, в зависимости от того, предполагается ли действовать на узел управления нажатием или тяговым усилием, можно оптимально определить поверхности управления, например, для облегчения ручного захвата или нажатия при помощи приспособления. Можно также легко выполнять узлы управления, использующие рычажный эффект, адаптируя их к усилию, которое может приложить пользователь в зависимости от соответствующего направления управления с целью обеспечения легкости управления запорным механизмом по обоим направлениям управления. В вариантах выполнения с единым узлом управления добиваются простоты, низкой себестоимости и надежности работы. В зависимости от типа применения устройства крепления или от индивидуального пользователя можно выбирать тот или иной вариант выполнения, и даже варианты выполнения, производные от описанных и показанных на чертежах.
Реферат
В устройстве крепления обуви на спортивном инвентаре содержится запорный механизм, предназначенный для взаимодействия с соединительным узлом обуви, и система расцепления, приводимая в действие пользователем для расцепления механизма. Система расцепления выполнена с возможностью как непосредственного, так и опосредованного приведения в действие, по меньшей мере, в двух разных направлениях управления для осуществления расцепления механизма. Система расцепления содержит по меньшей мере два отдельных узла управления, каждый из которых выполнен с возможностью приведения в действие в одном из по меньшей мере двух направлений управления. Система расцепления содержит первый узел управления, выполненный с возможностью приведения в действие в первом направлении управления, при котором он непосредственно управляет расцеплением запорного механизма, и второй узел управления, выполненный с возможностью перемещения в первом направлении управления, при котором он управляет расцеплением механизма через первый узел управления. Технический результат, который достигается при использовании узла крепления с двойным управлением, заключается в надежном управлении устройством крепления и не представляющем трудностей в любой возникающей ситуации. 17 з.п. ф-лы, 21 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для соединения спортивного ботинка с устройством для скольжения
Комментарии