Устройство дистанционного управления пылесосом - RU2153836C1
Код документа: RU2153836C1
Чертежи
Описание
Настоящее изобретение относится к пылесосам и, более конкретно, к устройству дистанционного управления пылесосом для дистанционного радиоуправления операциями, выполняемыми основной частью пылесоса, при помощи кнопочного блока ввода, расположенного на ручке.
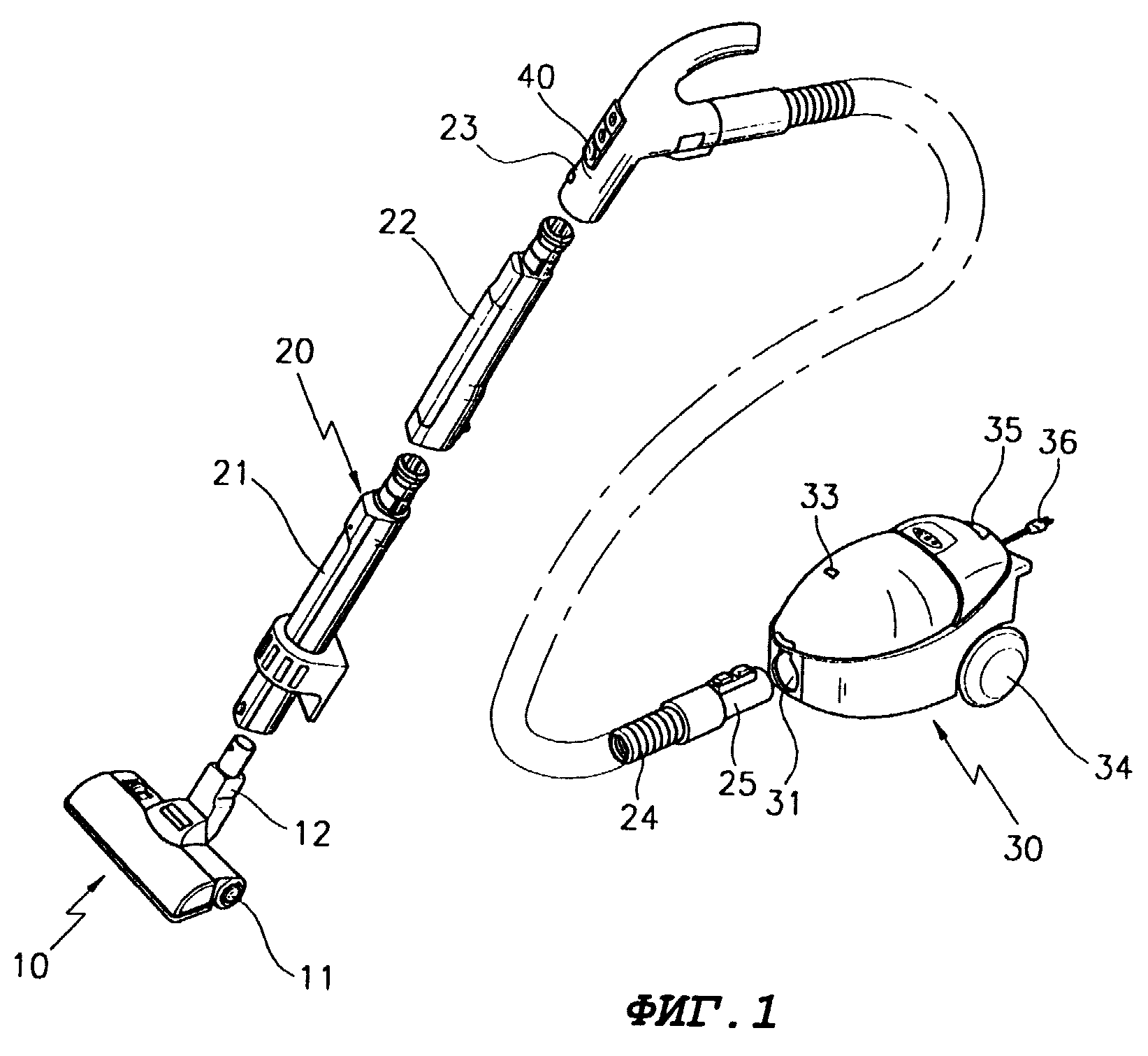
Как правило, пылесос снабжен, как представлено на фиг. 1, всасывающей входной частью 10 для всасывания пыли, других посторонних предметов и т.п., находящихся на поверхности пола, переходной частью 20 для беспрепятственного перемещения пыли, всосанной всасывающей входной частью 10 в пылеуловительную камеру, как правило, расположенную в основной части 30, и основной частью 30 для сбора пыли, перемещаемой по переходной части 20, и для создания всасывающей силы. Всасывающая входная часть 10 содержит два первых переходных элемента 11, расположенных на обоих ее концах, и соединительную трубку 12, выполненную как единое целое на верхнем заднем ее конце.
Кроме того, переходная часть 20 снабжена первой и второй удлинительными трубками 21 и 22, изготовленными из пластмассового материала и соединяемыми с полой частью соединительной трубки 12 ручкой 23, соединенной с первой и второй удлинительными трубками 21 и 22, и рукавом 24, имеющим обычную конфигурацию и соединенным с ручкой 23 для получения сообщения между ними.
Ручка 23 снабжена кнопкой для ступенчатого регулирования силы всасывания воздуха и для управления операций включения/выключения пылесоса, причем кнопочный блок 40 ввода расположен на ней для выработки сигнала кнопки в результате манипуляции кнопкой. Рукав 24 оснащен вмонтированным в него кабелем связи (не показан) для передачи выходного сигнала от кнопочного блока 40 ввода к основной части 30.
Основная часть 30 снаружи снабжена установочным соединительным отверстием 31, в которое вставляется конец рукава 24, дисплеем 33 количества пыли для отображения количества пыли, собранной в пылеуловительной камере (описана ниже), парой поддерживающих колес 34, установленных по обе ее стороны, ручкой 35 и вилкой 36 для подачи электроэнергии.
Кроме того, основная часть 30 снабжена расположенным внутри нее двигателем (не показан), крыльчаткой (не показана), соединенной с двигателем для создания силы всасывания, и пылеуловительной камерой (описана ниже) для сбора пыли, всасываемой крыльчаткой.
Однако с обычными пылесосами такой конструкции существует проблема, заключающаяся в трудности производства сложного рукава 24, поскольку в нем расположен кабель связи для передачи сигнала кнопки, и трудно пользоваться ручкой 23 вследствие неприемлемого веса рукава 24.
Наиболее близким к данному изобретению является устройство дистанционного управления пылесосом, имеющим всасывающую входную часть, переходную часть с ручкой и основную часть, в которой установлены двигатель и пылеуловительная камера, причем переходная часть соединяет всасывающую входную часть с основной частью и предназначена для перемещения собранных всасывающей входной частью посторонних предметов, таких как пыль, в пылеуловительную камеру путем всасывания в соответствии с силой всасывания, создаваемой приведением в действие двигателя, содержащее кнопочный блок ввода, снабженный множеством кнопок для управления операциями включения/выключения и скоростью вращения двигателя и для генерирования сигнала кнопки, соответствующего манипуляции кнопками, радиопередающее/радиоприемное средство для передачи или приема по радио сигнала кнопки, генерируемого кнопочным блоком ввода, и средство управления приведением в действие двигателя для управления операциями включения/выключения и скоростью вращения двигателя в соответствии с сигналом кнопки, полученным от радиопередающего/радиоприемного средства (см. патент США 4369543, кл. A 47 L 9/00, 1983).
Недостатком известного устройства является невысокая эффективность устройства дистанционного управления пылесосом.
Техническим результатом данного изобретения является обеспечение устройства дистанционного управления пылесосом, сконструированного и приспособленного для дистанционного управления работой двигателя.
Данный технический результат достигается за счет того, что в устройстве дистанционного управления пылесосом, имеющим всасывающую входную часть, переходную часть с ручкой и основную часть, в которой установлены двигатель и пылеуловительная камера, причем переходная часть соединяет всасывающую входную часть с основной частью и предназначена для перемещения собранных всасывающей входной частью посторонних предметов, таких как пыль, в пылеуловительную камеру путем всасывания в соответствии с силой всасывания, создаваемой приведением в действие двигателя, содержащем кнопочный блок ввода, снабженный множеством кнопок для управления операциями включения/выключения и скоростью вращения двигателя и для генерирования сигнала кнопки, соответствующего манипуляции кнопками, радиопередающее/радиоприемное средство для передачи или приема по радио сигнала кнопки, генерируемого кнопочным блоком ввода, и средство управления приведением в действие двигателя для управления операциями включения/выключения и скоростью вращения двигателя в соответствии с сигналом кнопки, полученным от радиопередающего/радиоприемного средства, согласно изобретению радиопередающее/радиоприемное средство содержит передатчик радиочастотного сигнала, предназначенный для модуляции сигнала кнопки, исходящего от кнопочного блока ввода, в соответствующий ему радиочастотный сигнал и для излучения этого радиочастотного сигнала, и приемник радиочастотного сигнала, предназначенный для приема и демодуляции радиочастотного сигнала, переданного от передатчика радиочастотного сигнала, и для преобразования радиочастотного сигнала в первичный сигнал кнопки, причем кнопочный блок ввода и передатчик радиочастотного сигнала расположены в ручке переходной части, а приемник радиочастотного сигнала и средство управления приведением в действие двигателя расположены в основной части пылесоса, а также за счет того, что передатчик радиочастотного сигнала является двухтональным многочастотным импульсным передатчиком и предназначен для преобразования сигнала кнопки, исходящего от кнопочного блока ввода, в соответствующие ему двухтональные многочастотные импульсы и передачи их наложенными на несущую волну, а приемник радиочастотного сигнала является двухтональным многочастотным импульсным приемником и предназначен для приема и демодуляции двухтональных многочастотных импульсов, переданных двухтональным многочастотным импульсным передатчиком на несущей волне, и преобразования их в первичный сигнал кнопки.
Настоящее изобретение предназначено для решения указанных выше проблем, и целью настоящего изобретения является обеспечение устройства дистанционного управления пылесосом, сконструированного и приспособленного для дистанционного управления работой двигателя, расположенного в основной части, при помощи кнопочного блока ввода, расположенного на ручке, на радиочастоте, таким образом устраняя необходимость применения в рукаве кабеля связи для упрощения производства рукава и уменьшения веса рукава для удобства его использования.
Согласно цели настоящего изобретения обеспечено устройство дистанционного управления пылесосом для сбора пыли в пылеуловительную камеру путем всасывания посторонних предметов, таких как пыль и т.д.,
силой всасывания, создаваемой работой двигателя, при этом устройство содержит:
кнопочный блок ввода, снабженный множеством кнопок для управления операциями включения/выключения и скоростью
вращения двигателя и для выработки сигнала кнопки, соответствующего манипулированию кнопками;
радиопередающее/радиоприемное средство для передачи или приема по радио сигнала кнопки,
создаваемого кнопочным блоком ввода сигнала;
средство управления работой двигателя для управления операциями включения/выключения и скоростью вращения двигателя в соответствии с сигналом
кнопки, принимаемым от радиопередающего/радиоприемного средства.
Сущность и цели настоящего изобретения очевидны из нижеследующего подробного его описания, приведенного со ссылками на
прилагаемые чертежи, на которых:
фиг. 1 - схематический внешний вид пылесоса, соответствующего известному уровню техники;
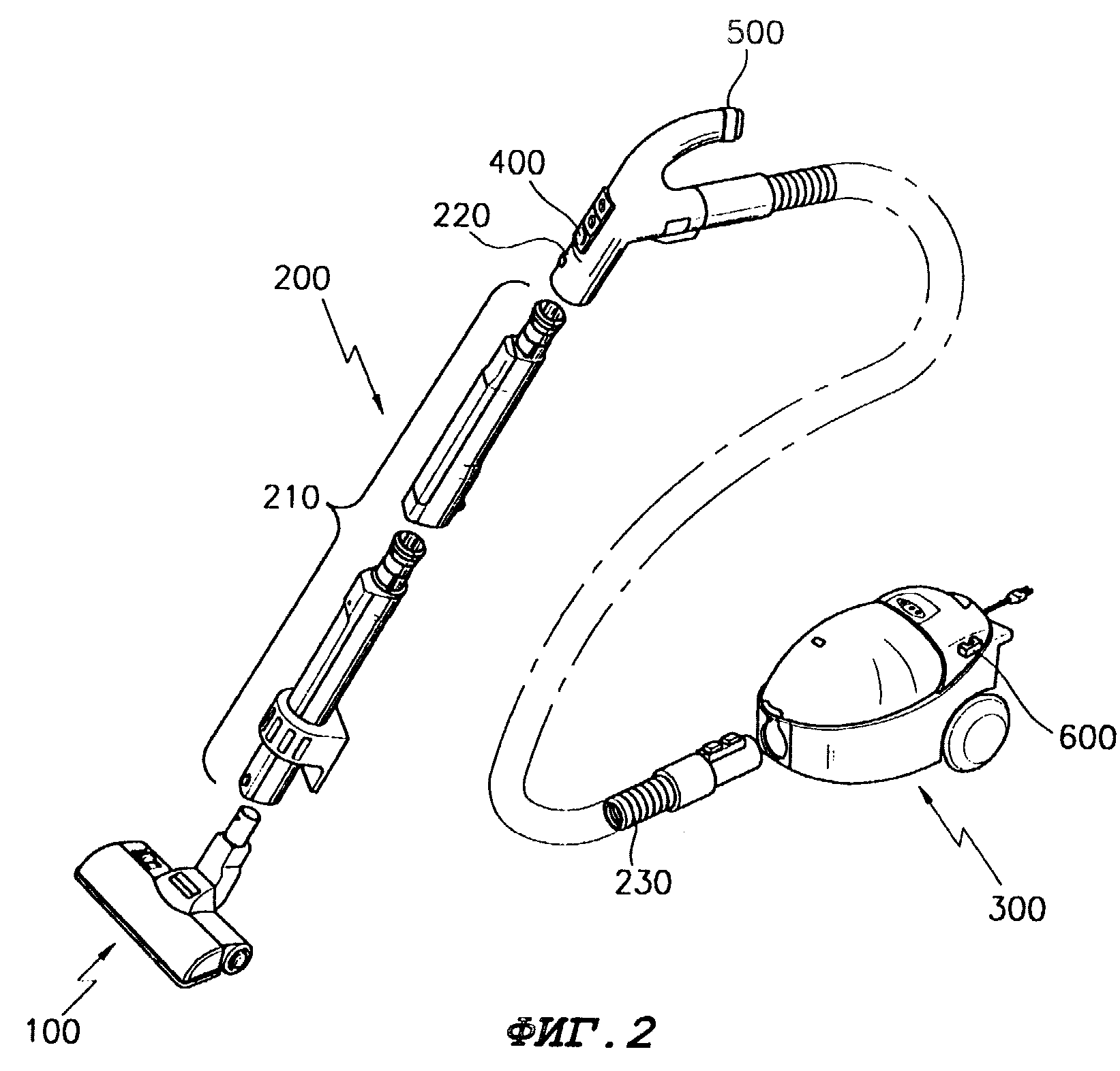
фиг. 2 - схематический внешний вид пылесоса,
соответствующего настоящему изобретению;
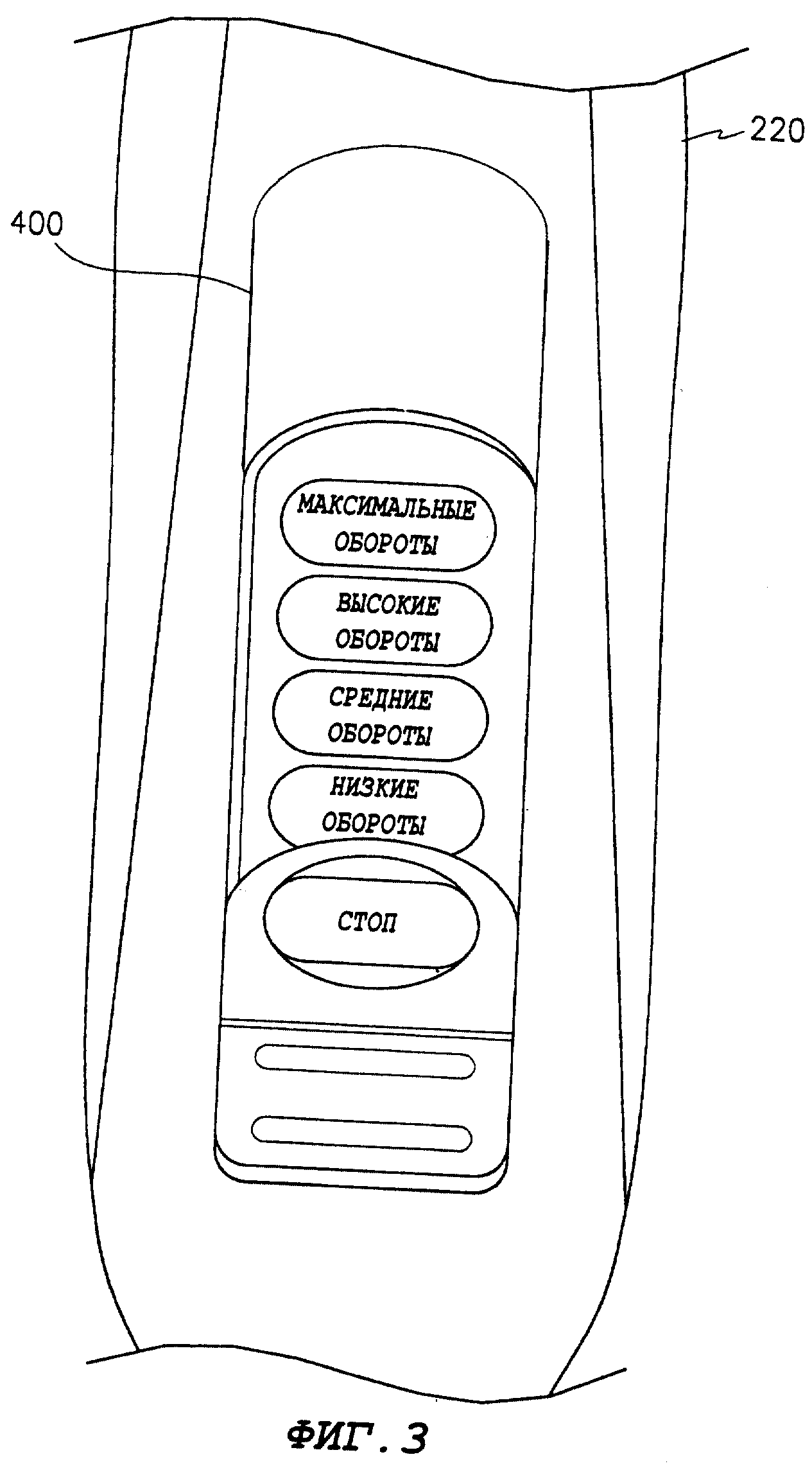
фиг. 3 - схематический частичный вид, представляющий кнопки на кнопочном блоке ввода сигнала, представленном на фиг. 2;
фиг. 4 - блок-схема
устройства дистанционного управления пылесоса в соответствии с первым вариантом осуществления настоящего изобретения;
фиг. 5 - блок-схема устройства дистанционного управления пылесоса в
соответствии со вторым вариантом осуществления настоящего изобретения.
Подробное описание изобретения.
Далее раскрыты предпочтительные варианты осуществления настоящего изобретения, приведенные со ссылками на прилагаемые чертежи.
На фиг. 2 представлен схематический внешний вид пылесоса, соответствующего настоящему изобретению, где пылесос содержит всасывающую входную часть 100 для всасывания посторонних предметов, таких как пыль и т.д., переходную часть 200 для беспрепятственного перемещения пыли, всасываемой всасывающей входной частью 100 в пылеуловительную камеру, как правило, расположенную в основной части 300, и основную часть 300 для сбора пыли, поступающей по переходной части 200.
Переходная часть 200 содержит удлинительную трубу 210, ручку 220, соединенную с удлинительной трубой 210, и рукав 230 обычной конфигурации, соединяемый с ручкой 220.
Ручка 220, как показано на фиг. 3, снабжена расположенными на ней кнопочным блоком 400 ввода, оснащенным множеством кнопок выбора режима для ввода служебной команды таким образом, что может осуществляться ступенчатое управление операциями включения/выключения и силой всасывания пылесоса, и может быть выработан сигнал кнопки, соответствующий манипуляции кнопкой, и блок 500 передачи радиочастотного сигнала (описан ниже).
Кроме того, основная часть 300 оснащена расположенным снаружи блоком 600 приема радиочастотного сигнала (описан ниже) и расположенным внутри нее двигателем 810 (описан ниже) и крыльчаткой (не показана) для создания силы всасывания при ее совместном вращении с двигателем 810, а также пылеуловительной камерой (не показана), где собирается всасываемая крыльчаткой пыль.
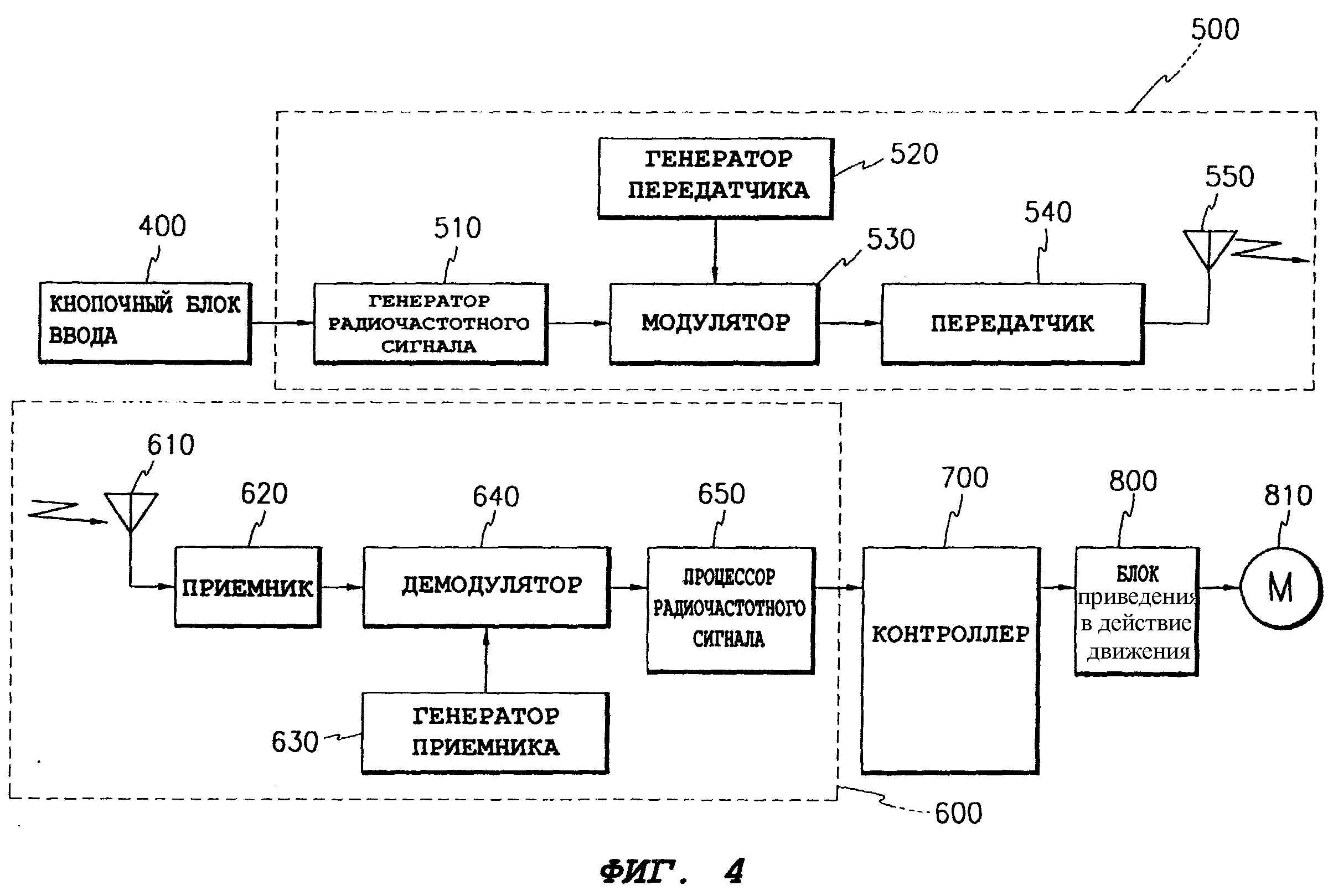
На фиг. 4 представлена блок-схема устройства дистанционного управления пылесосом, соответствующего первому варианту осуществления настоящего изобретения, где устройство дистанционного управления, соответствующее настоящему изобретению, состоит из кнопочного блока 400 ввода, блока 500 передачи радиочастотного сигнала и блока 600 приема радиочастотного сигнала, контроллера 700, блока 800 приведения в действие двигателя и двигателя 810.
Блок 500 передачи радиочастотного сигнала, показанный на фиг. 4, оснащен генератором 510 радиочастотного сигнала, генератором 520 передатчика, модулятором 530, передатчиком 540 и передающей антенной 550, где генератор 510 радиочастотного сигнала служит для выработки волны сигнала, соответствующей сигналу кнопки, когда сигнал поступает от кнопочного блока 400 ввода, генератор 520 передатчика предназначен для генерирования несущей волны с частотой, адекватной радиосвязи, модулятор 530 служит для наложения волны сигнала, поступающей от генератора 510 радиочастотного сигнала, на несущую волну, генерируемую генератором 520 передатчика, чтобы модулировать ее в радиочастотный сигнал, и передатчик 540 усиливает радиочастотный сигнал, модулированный модулятором 530, для его передачи через передающую антенну 550.
Кроме того, блок 600 приема радиочастотного сигнала оснащен приемной антенной 610, приемником 620, генератором 630 приемника, демодулятором 640 и процессором 650 радиочастотного сигнала, где приемник 620 усиливает радиочастотный сигнал, принятый приемной антенной 610, причем генератор 630 приемника выполнен для генерирования такой же частоты, которую имеет несущая волна генератора 520 передатчика, демодулятор 640 служит для выработки первичной волны сигнала из радиочастотного сигнала, усиленного приемником 620, согласно частоте, генерируемой генератором 630 приемника, а процессор 650 радиочастотного сигнала служит для обработки волны сигнала, исходящего из демодулятора 640, путем преобразования ее в первичный сигнал кнопки и подачи его в контроллер 700.
Контроллер 700 выдает сигнал управления для управления операциями включения/выключения и скоростью вращения двигателя 810 в соответствии с сигналом кнопки, выданным процессором 650 радиочастотного сигнала блока 600 приема радиочастотного сигнала. Блок приведения в действие двигателя управляет подводимой энергией в соответствии с сигналом управления, подаваемым контроллером 700, для управления, таким образом, операциями включения/выключения и скоростью вращения двигателя 810, и двигатель 810 приводится в действие энергией, подводимой от блока 800 приведения в действие двигателя, для вращения посредством этого крыльчатки.
Далее подробно и со ссылками на фиг. 2-4 будет раскрыт способ работы устройства, выполненного согласно настоящему изобретению.
Когда энергия подается от заранее определенного источника энергии (например, батареи) к передатчику 500 радиочастотного сигнала, расположенному в ручке 200, несущая волна с частотой, адекватной радиосвязи, генерируется генератором 520 передатчика 500 радиочастотного сигнала, и когда электрическую вилку (см. позицию 36 на фиг. 1) основной части 300 вставляют в розетку (не показана), энергия поступает в основную часть 300, и частота, идентичная частоте несущей волны от генератора 520 передатчика, генерируется генератором 630 приемника 600 радиочастотного сигнала.
В этот момент, кнопки (например, "максимальные обороты", "высокие обороты", "средние обороты", "низкие обороты", "стоп") на кнопочном блоке 400 ввода при манипуляции кнопками выдают сигнал кнопочного блока 400 ввода.
Выходной сигнал кнопочного блока 400 ввода преобразуется в соответствующую ему волну сигнала генератором 510 радиочастотного сигнала передатчика 500 радиочастотного сигнала, а выходная волна сигнала от генератора 510 радиочастотного сигнала в передатчике 500 радиочастотного сигнала накладывается модулятором 530 на несущую волну, генерируемую генератором 520 передатчика и преобразуется в радиочастотный сигнал для последующего вывода.
Выходной радиочастотный сигнал от генератора 520 передатчика усиливается передатчиком 540 с заранее определенным коэффициентом усиления, требуемым для обеспечения радиосвязи через передающую антенну 550. Выходной радиочастотный сигнал от передающей антенны 550 передатчика 500 радиочастотного сигнала принимается приемной антенной 610 блока 600 приема радиочастотного сигнала, и радиочастотный сигнал, принятый приемной антенной 610, усиливается с заранее определенным коэффициентом усиления приемником 620 для последующего вывода. Выходной радиочастотный сигнал от приемника 620 демодулируется демодулятором 640 в первичную волну сигнала, соответствующую частоте, генерируемой генератором 630 приемника, а демодулированная волна сигнала обрабатывается процессором 650 радиочастотного сигнала и преобразуется в первичный сигнал кнопки для последующей передачи в контроллер 700.
При этом контроллер 700 распознает команду пользователя, соответствующую сигналу кнопки и поступающую от процессора 650 радиочастотного сигнала блока 600 приемника радиочастотного сигнала, а именно распознает силу всасывания воздуха, выбранную пользователем, и выдает сигнал управления, соответствующий результату распознавания.
Другими словами, контроллер 700 выдает сигнал управления для приведения в действие двигателя 810 со скоростью, соответствующей силе всасывания, выбранной пользователем, в соответствии с командой пользователя, или выдает сигнал управления для прекращения приведения в действие двигателя 810.
Энергия на двигатель 810 подается или отключается от него блоком 800 приведения в действие двигателя в соответствии с сигналом управления, поступающим от контроллера 700, и когда энергия подается на двигатель 810 от блока 800 приведения в действие двигателя, двигатель 810 вращается подаваемой энергией.
Когда двигатель 810 приводится в действие, как описано выше, крыльчатка в основной части 300 вращается совместно с двигателем 810 для создания силы всасывания, соответствующей скорости вращения двигателя 810, таким образом, что посторонние предметы, такие как пыль и т.п., всасываются в пылеуловительную камеру в основной части 300 через всасывающую входную часть 100 и переходную часть 200.
Следовательно, когда кнопками на кнопочном блоке 400 ввода, находящимся в ручке 220, манипулируют для изменения силы всасывания воздуха или для остановки работы пылесоса, сигнал кнопки, поступающий от кнопочного блока 400 ввода, передается или принимается в виде радиочастотного сигнала, подаваемого в контроллер 700, и двигатель управляется при его работе сигналами управления, поступающими от контроллера 700.
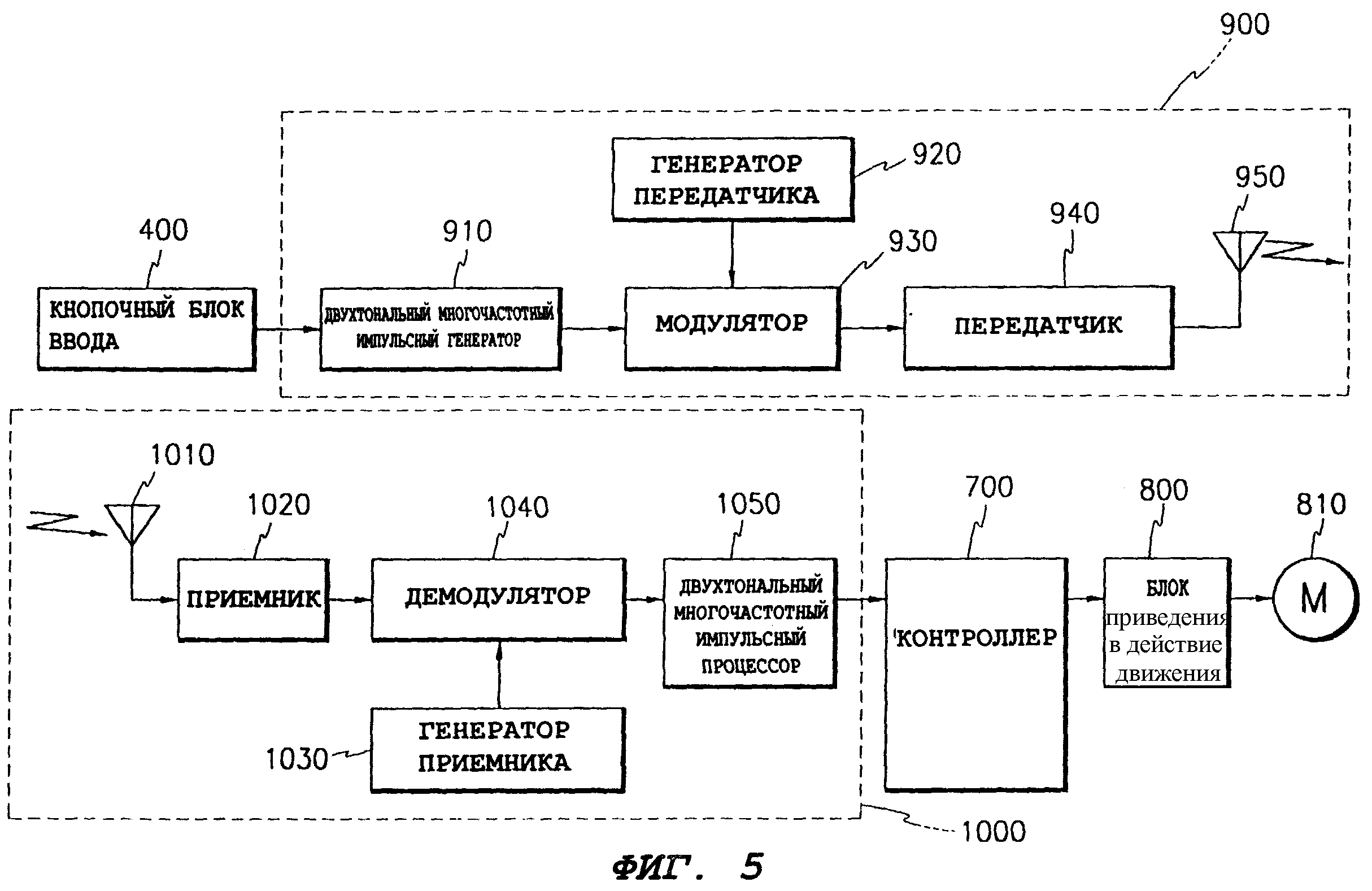
Tеперь подробно со ссылками на фиг. 5 будет описан второй вариант осуществления настоящего изобретения. На фиг. 5 представлена блок-схема устройства дистанционного управления пылесоса, соответствующего второму варианту осуществления настоящего изобретения, где устройство дистанционного управления содержит кнопочный блок 400 ввода, двухтональный многочастотный импульсный передатчик 900, контроллер 700, двухтональный многочастотный импульсный приемник 1000, блок 800 приведения в действие двигателя и двигатель 810.
Здесь базовая конструкция настоящего варианта осуществления изобретения подобна конструкции первого варианта осуществления изобретения, при этом для обозначения подобных или эквивалентных деталей или частей для упрощения представления и описания использованы такие же позиции и символы, что и на фиг. 2-4.
Hа фиг. 5 двухтональный многочастотный импульсный передатчик 900 содержит двухтональный многочастотный импульсный генератор 910, генератор 920 передатчика, модулятор 930, передатчик 940 и передающую антенну 950. Двухтональный многочастотный импульсный генератор 910 выдает двухтональные многочастотные импульсы, соответствующие сигналу кнопки, когда сигнал кнопки вводится от кнопочного блока 400 ввода, генератор 920 передатчика генерирует несущую волну с частотой, адекватной радиосвязи, модулятор 930 выдает несущую волну, генерированную генератором 920 передатчика, с наложенными двухтональными многочастотными импульсами, выдаваемыми двухтональным многочастотным импульсным генератором 910, и передатчик 940 служит для усиления двухтональных многочастотных импульсов, модулированных модулятором 930 для последующей их передачи через передающую антенну 950.
Кроме того, двухтональный многочастотный импульсный приемный блок 1000 оснащен приемной антенной 1010, приемником 1020, генератором 1030 приемника, демодулятором 1040 и двухтональным многочастотным импульсным процессором 1050, где приемник 1020 предназначен для усиления сигнала, исходящего от передатчика 900 и принятого приемной антенной 1010, а именно усиления двухтональных многочастотных импульсов, наложенных на несущую волну, а генератор 1030 приемника служит для генерирования частоты, идентичной частоте, выдаваемой генератором 920 передатчика.
Демодулятор 1040 выделяет первичные двухтональные многочастотные импульсы из сигнала, усиленного приемником 1020, в соответствии с частотой, генерированной генератором 1030 приемника, а двухтональный многочастотный импульсный процессор 1050 служит для обработки двухтональных многочастотных импульсов, выделенных демодулятором 1040, и преобразует их в сигнал, соответствующий сигналу кнопки, и выдает его в контроллер 700.
Далее способ работы устройства, выполненного в соответствии со вторым вариантом осуществления настоящего изобретения, раскрыт со ссылками на фиг. 5.
Когда энергия подается на двухтональный многочастотный импульсный передатчик 900 от заранее определенного источника энергии (например, батареи) в исходном положении, несущая волна, имеющая частоту, адекватную радиосвязи, генерируется генератором 920 передатчика двухтонального многочастотного импульсного передатчика 900, и когда электрическую вилку (см. позицию 36 на фиг. 1) основной части 300 вставляют в розетку (не показана), энергия поступает в основную часть 300, и частота, идентичная частоте, генерируемой генератором 920 передатчика, генерируется генератором 1030 приемника двухтонального многочастотного импульсного приемника 1000.
Далее, когда манипулируют кнопками (например, кнопками выбора режимов "максимальные обороты", "высокие обороты", "средние обороты", "низкие обороты" и "стоп") кнопочного блока 400 ввода на ручке 220, сигнал кнопки, соответствующий манипуляции кнопкой, выдается от кнопочного блока 400 ввода.
Сигнал кнопки, поступающей от кнопочного блока 400 ввода, преобразуется в соответствующие ему двухтональные многочастотные импульсы двухтональным многочастотным импульсным генератором 910 двухтонального многочастотного импульсного передатчика 900 для последующего вывода, и выходные двухтональные многочастотные импульсы от двухтонального многочастотного импульсного генератора 910 двухтонального многочастотного импульсного передатчика 900 накладываются модулятором 930 на несущую волну, генерируемую генератором 920 передатчика для последующего вывода. Выходные двухтональные многочастотные импульсы, наложенные на несущую волну генератором 920 передатчика, усиливаются генератором 940 с заранее определенным коэффициентом усиления, соответствующим радиосвязи, и передаются передающей антенной 950.
Сигнал, переданный передающей антенной 950 двухтонального многочастотного импульсного передатчика 900, принимается приемной антенной 1010 двухтонального многочастотного импульсного приемника 1000, и сигнал, принятый приемной антенной 1010, усиливается приемником 1020 с заранее определенным коэффициентом усиления для последующего вывода. Выходной сигнал от приемника 1020 демодулируется демодулятором 1040 до получения первичных двухтональных многочастотных импульсов, соответствующих частоте, генерируемой генератором 1030 приемника, и демодулированный сигнал обрабатывается двухтональным многочастотным импульсным процессором 1050 и преобразуется в первичный сигнал кнопки для последующей передачи в контроллер 700.
При этом контроллер 700 распознает команду пользователя, соответствующую сигналу кнопки, поступающую от двухтонального многочастотного импульсного процессора 1050 двухтонального многочастотного импульсного приемника 1000, а именно распознает силу всасывания воздуха, выбранную пользователем, и выдает сигнал управления, полученный в результате распознавания.
Другими словами, контроллер 700 выдает сигнал управления для приведения двигателя 810 в действие со скоростью, соответствующей силе всасывания, выбранной пользователем, в соответствии с командой пользователя, или выдает сигнал управления для прекращения приведения в действие двигателя 810.
Энергия, поступающая от блока 800 приведения в действие двигателя, подается к двигателю 810 или отключается в соответствии с сигналом управления, поступающим от контроллера 700, и когда энергия подается от блока 800 приведения в действие двигателя на двигатель 810, двигатель вращается подаваемой энергией.
Когда двигатель 810 приводится в действие, как описано выше, крыльчатка в основной части 300 вращается совместно с двигателем 810 для создания силы всасывания, соответствующей скорости вращения двигателя 810, таким образом, что посторонние предметы, такие как пыль и т.п., всасываются в пылеуловительную камеру в основной части 300 через всасывающую входную часть 100 и переходную часть 200.
Следовательно, когда кнопками на кнопочном блоке 400 ввода, находящeмся в ручке 220, манипулируют для изменения силы всасывания воздуха или для остановки работы пылесоса, сигнал кнопки, поступающий от кнопочного блока 400 ввода, передается или принимается в режиме двухтональных многочастотных импульсов, которые затем подаются в контроллер 700, и двигатель 810 управляется при его работе сигналом управления, поступающим от контроллера 700.
Как видно из предшествующего описания, преимущество устройства дистанционного управления пылесосом согласно настоящему изобретению заключается в том, что двигателем управляют при его работе дистанционно по радио при помощи кнопочного блока ввода, расположенного в ручке, таким образом исключая необходимость установки кабеля связи в рукаве, посредством чего упрощается производство рукава, уменьшается вес рукава и, следовательно, обеспечивается удобство использования.
Реферат
Изобретение относится к устройствам дистанционного управления пылесосом и может быть использовано в качестве бытовой техники. В данном устройстве выходной сигнал кнопки, исходящий из кнопочного блока ввода, расположенного в ручке, передается, будучи преобразованным в радиочастоту средством передачи радиосигнала, и радиосигнал преобразуется в первичный сигнал кнопки средством приема радиосигнала, расположенным на основной части пылесоса для последующего ввода в контроллер, который в свою очередь управляет работой двигателя в соответствии с сигналом кнопки таким образом, что нет необходимости в установке кабеля связи в рукаве, посредством чего упрощается производство рукава, уменьшается вес рукава и, следовательно, обеспечивается удобство использования. Изобретение позволяет создать устройство дистанционного управления пылесосом, сконструированного и приспособленного для дистанционного управления пылесосом, расположенного в основной части. 1 з.п. ф-лы, 5 ил.
Комментарии