Робот-пылесос - RU2719222C1
Код документа: RU2719222C1
Чертежи





Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к роботу-пылесосу.
Предпосылки создания изобретения
В общем, робот-пылесос представляет собой устройство, которое автоматически выполняет очистку посредством всасывания посторонних веществ, таких как пыль, с пола при одновременном автономном перемещении в очищаемой зоне без управления пользователем.
Робот-пылесос определяет расстояние до препятствий, таких как мебель, офисное оборудование, стены и тому подобное, которые установлены в очищаемой зоне, и, на основании определения, робот-пылесос составляет карту очищаемой зоны или обходит препятствия посредством управления приводом левого и правого колес, предусмотренных в роботе-пылесосе. В существующем уровне техники, расстояние перемещения робота-пылесоса может быть измерено посредством датчика, который обращен к потолку или полу, и на основании измерения вычисляется расстояние до препятствия. Тем не менее, это измерение расстояния до препятствия является косвенной оценкой, основанной на расстоянии перемещения робота-пылесоса, и неточности измерения расстояния перемещения робота-пылесоса приводят к ошибкам определения положения препятствий. Ошибки определения расстояния перемещения также могут возникать, например, в результате наличия зазубрин на полу. В другом примере, робот-пылесос может выполнять измерения расстояния посредством испускания инфракрасного света или ультразвуковых волн и измерения отражений от препятствий, и эти типы технологий измерения могут включать в себя значительную ошибку по причине большого количества света или звука, который рассеивается такими препятствиями.
В последнее время разработана технология управления перемещением робота-пылесоса посредством испускания света согласно конкретной конфигурации спереди робота-пылесоса, захватывания изображения испущенного света, извлечения конфигурации из захваченного изображения, и распознавания препятствий в очищаемой зоне. Например, в Выложенной Публикации Патента Кореи №10-2013-0141979 (далее в этом документе называемой ʺописанием '979ʺ) описан робот-пылесос, который включает в себя модуль источника света, выполненный с возможностью испускания света согласно крестообразной конфигурации, и модуль камеры, выполненный с возможностью захватывания изображения спереди пылесоса. Робот-пылесос извлекает конфигурацию из изображения, полученного посредством модуля камеры, и распознает препятствия в очищаемой зоне на основании извлеченной конфигурации. Тем не менее, этот робот-пылесос имеет один модуль источника света, выполненный с возможностью испускания света под однородным углом, в результате чего диапазон, в котором могут быть обнаружены препятствия, ограничен, и робот-пылесос испытывает трудности при распознавании стереоскопической формы препятствия, которое проходит в вертикальном направлении выше некоторой высоты. В частности, робот-пылесос в описании '979 может не чувствовать препятствие, которое расположено выше, чем модуль источника света, или препятствие, которое по отношению к полу выше, чем модуль источника света, по причине наличия некоторых признаков робота-пылесоса, в котором свет испускается согласно крестообразной конфигурации к полу в очищаемой зоне.
В описании '979, высота препятствия может быть в некоторой степени измерена посредством излучения вертикальной линейной конфигурации света, испускаемого из модуля камеры к препятствию. Тем не менее, полученная таким образом информация о препятствии относится только к части препятствия, которая облучена вертикальной линейной конфигурацией света.
Когда препятствие представляет собой, например, кровать, имеющую матрас, расположенный на ножках кровати, с заданным пространством, образованным под матрасом, блок управления робота-пылесоса может не распознать матрас, поскольку крестообразная конфигурация света, испускаемая из модуля источника света, излучается на пол в пространстве в зависимости от положения робота-пылесоса относительно кровати. Таким образом, блок управления управляет роботом-пылесосом для продолжения перемещения к кровати. В зависимости от высоты пространства, робот-пылесос может не войти в пространство и может столкнуться с конструкцией, такой как рама, которая поддерживает матрас, или может застрять между полом и рамой.
Краткое изложение сущности изобретения
Техническая Проблема
Следовательно, настоящее изобретение разработано в виду изложенных выше проблем, и целью настоящего изобретения является разработка робота-пылесоса, который может получать более конкретную информацию в отношении препятствия с использованием конфигураций света, испускаемых из двух блоков испускания конфигурации, которые расположены в верхнем и нижнем положениях.
Другой целью настоящего изобретения является разработка робота-пылесоса, обладающего возможностью предотвращения его застревания в пространстве, имеющем заданную высоту, которое образовано между препятствием, таким как кровать, и полом в очищаемой зоне, во время перемещения.
Еще одной целью настоящего изобретения является разработка робота-пылесоса, который может легче выполнять процесс калибровки блока испускания согласно первой конфигурации и блока испускания согласно второй конфигурации.
Техническое Решение
Робот-пылесос согласно настоящему изобретению включает в себя основной корпус, выполненный с возможностью перемещения в очищаемой зоне и всасывания посторонних веществ с пола в очищаемой зоне, блок получения изображения, предусмотренный на основном корпусе и выполненный с возможностью захватывания изображения заданной области спереди от основного корпуса, блок испускания согласно первой конфигурации, предусмотренный на основном корпусе и выполненный с возможностью испускания согласно первой конфигурации света вниз к заданной области, и блок испускания согласно второй конфигурации, предусмотренный на основном корпусе в положении под блоком испускания согласно первой конфигурации и выполненный с возможностью испускания согласно второй конфигурации света вверх к заданной области.
Путь, по которому испускается первая конфигурация света, и путь, по которому испускается вторая конфигурация света, могут пересекаться друг с другом при виде со стороны основного корпуса.
Пересечение (d1) пути, по которому испускается первая конфигурация света, и пути, по которому испускается вторая конфигурация света, может быть расположено ближе к основному корпусу, чем точка (d2) на полу, в которой блок получения изображения начинает захватывать изображение.
Блок получения изображения может содержать линзу, имеющую оптическую ось, которая ориентирована в горизонтальном направлении, и может иметь угол зрения, лежащий в диапазоне 100-110°.
Блок получения изображения может захватывать изображение части пола, которая расположена на расстоянии 110-120 мм или более от основного корпуса.
Как первая конфигурация, так и вторая конфигурация могут содержать горизонтальную линию.
Первая конфигурация света и вторая конфигурация света могут отличаться друг от друга.
Блок получения изображения, блок испускания согласно первой конфигурации и блок испускания согласно второй конфигурации могут быть расположены на одной прямой относительно друг друга на передней поверхности основного корпуса в вертикальном направлении.
Блок получения изображения может находиться под блоком испускания согласно первой конфигурации и блоком испускания согласно второй конфигурации.
Блок испускания согласно первой конфигурации может испускать первую конфигурацию света под первым вертикальным углом испускания, и блок испускания согласно второй конфигурации может испускать вторую конфигурацию света под вторым вертикальным углом испускания.
Блок получения изображения может находиться между блоком испускания согласно первой конфигурации и блоком испускания согласно второй конфигурации.
Блок испускания согласно первой конфигурации и блок испускания согласно второй конфигурации могут испускать свет под одинаковым вертикальным углом испускания. Вертикальный угол испускания может лежать в диапазоне 20-30°.
Согласно другому аспекту настоящего изобретения, робот-пылесос включает в себя кожух, образующий внешний вид, левое колесо и правое колесо, предусмотренные с возможностью вращения на кожухе, всасывающий модуль, предусмотренный в кожухе и выполненный с возможностью всасывания посторонних веществ с пола в очищаемой зоне, и датчик препятствия, предусмотренный на передней поверхности кожуха, причем датчик препятствия включает в себя раму модуля, соединенную с передней поверхностью кожуха, блок получения изображения, предусмотренный на раме модуля и выполненный с возможностью захватывания изображения заданной области спереди от кожуха, блок испускания согласно первой конфигурации, предусмотренный на раме модуля и выполненный с возможностью испускания согласно первой конфигурации света вниз к заданной области, и блок испускания согласно второй конфигурации, предусмотренный на раме модуля в положении под блоком испускания согласно первой конфигурации и выполненный с возможностью испускания согласно второй конфигурации света вверх к заданной области.
Путь, по которому испускается первая конфигурация света, и путь, по которому испускается вторая конфигурация света, могут пересекаться друг с другом при виде со стороны кожуха. Пересечение пути, по которому испускается первая конфигурация света, и пути, по которому испускается вторая конфигурация света, может находиться ближе к кожуху, чем точка на полу, в которой блок получения изображения начинает захватывать изображение. Как первая конфигурация, так и вторая конфигурация могут содержать горизонтальную линию.
Блок получения изображения, блок испускания согласно первой конфигурации и блок испускания согласно второй конфигурации могут быть расположены на одной прямой относительно друг друга в вертикальном направлении.
Блок получения изображения может находиться под блоком испускания согласно первой конфигурации и блоком испускания согласно второй конфигурации.
Блок получения изображения может находиться между блоком испускания согласно первой конфигурации и блоком испускания согласно второй конфигурации. Блок испускания согласно первой конфигурации и блок испускания согласно второй конфигурации могут быть расположены симметрично по отношению к блоку получения изображения.
Краткое описание чертежей
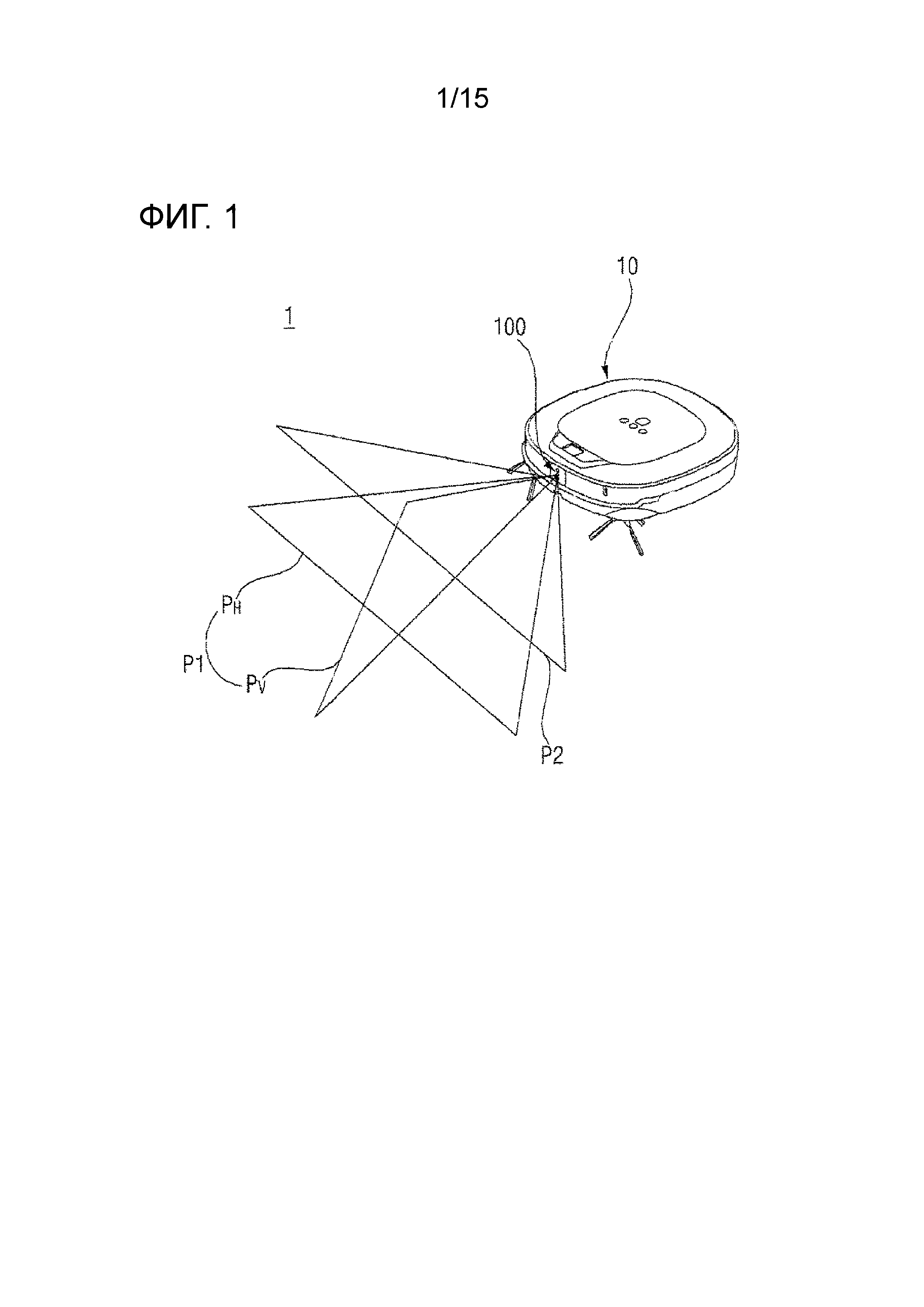
Фиг. 1 представляет собой вид в перспективе робота-пылесоса согласно варианту осуществления настоящего изобретения.
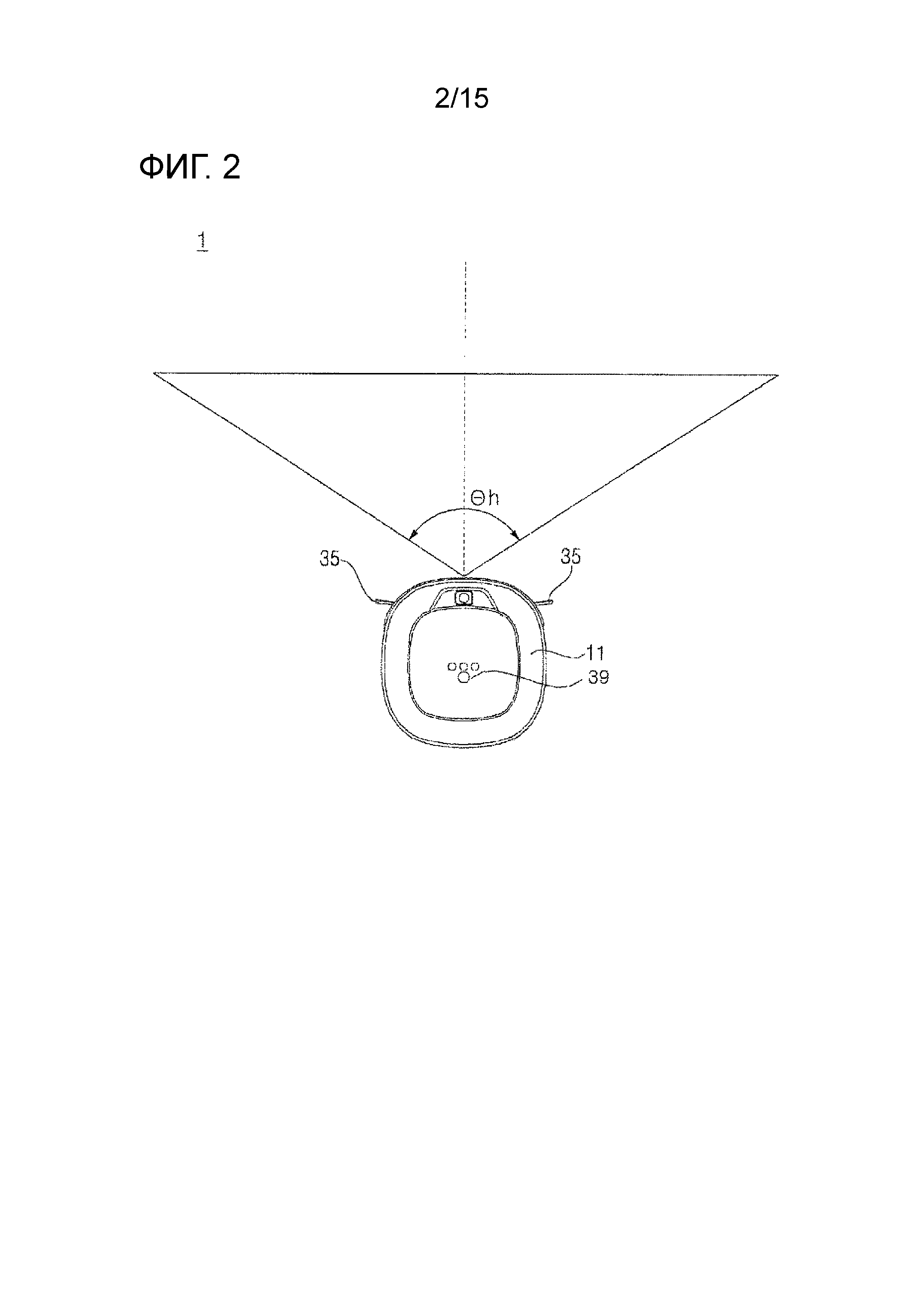
Фиг. 2 представляет собой вид, на котором показан угол горизонтального обзора робота-пылесоса с Фиг. 1.
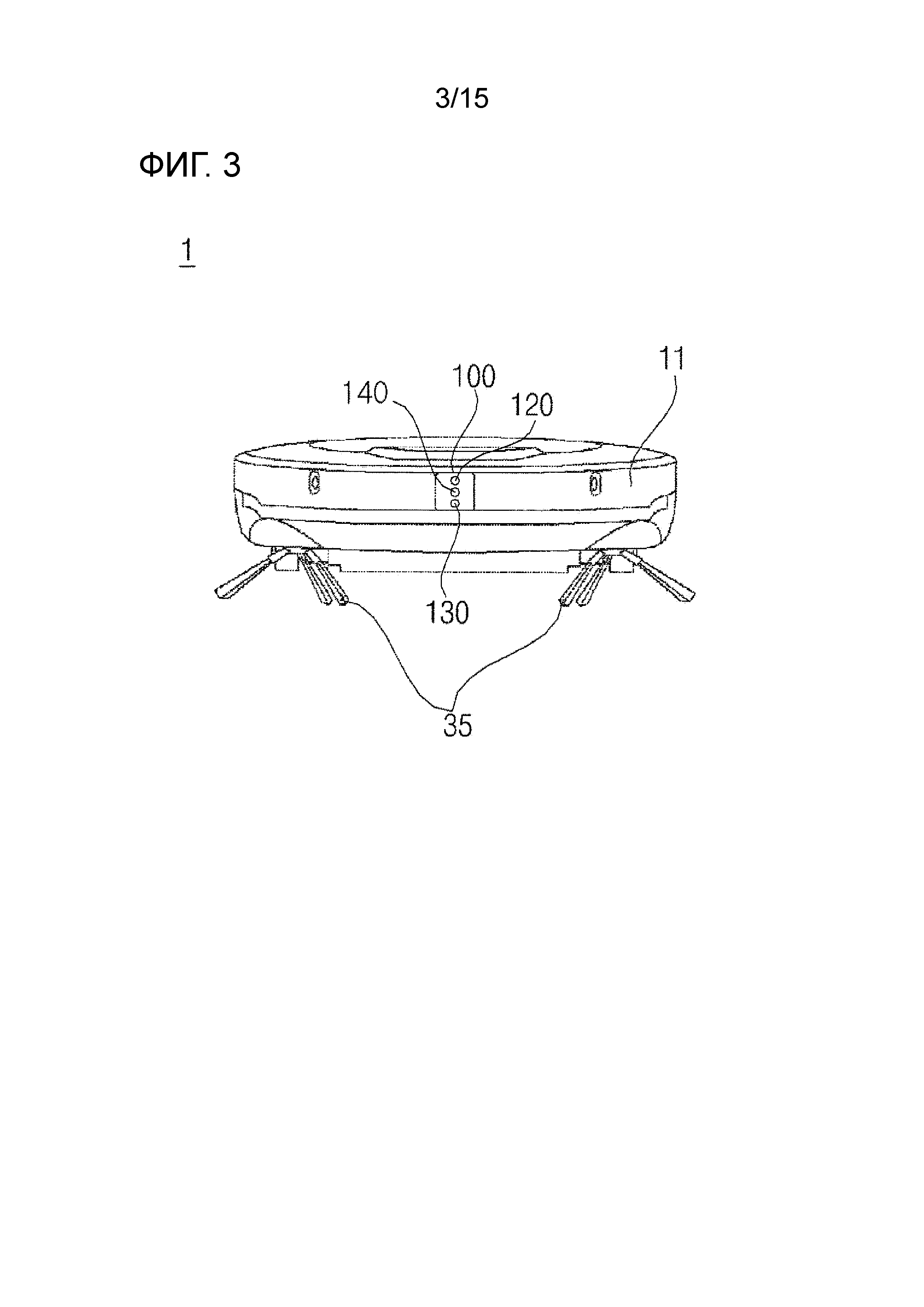
Фиг. 3 представляет собой вид спереди робота-пылесоса с Фиг. 1.
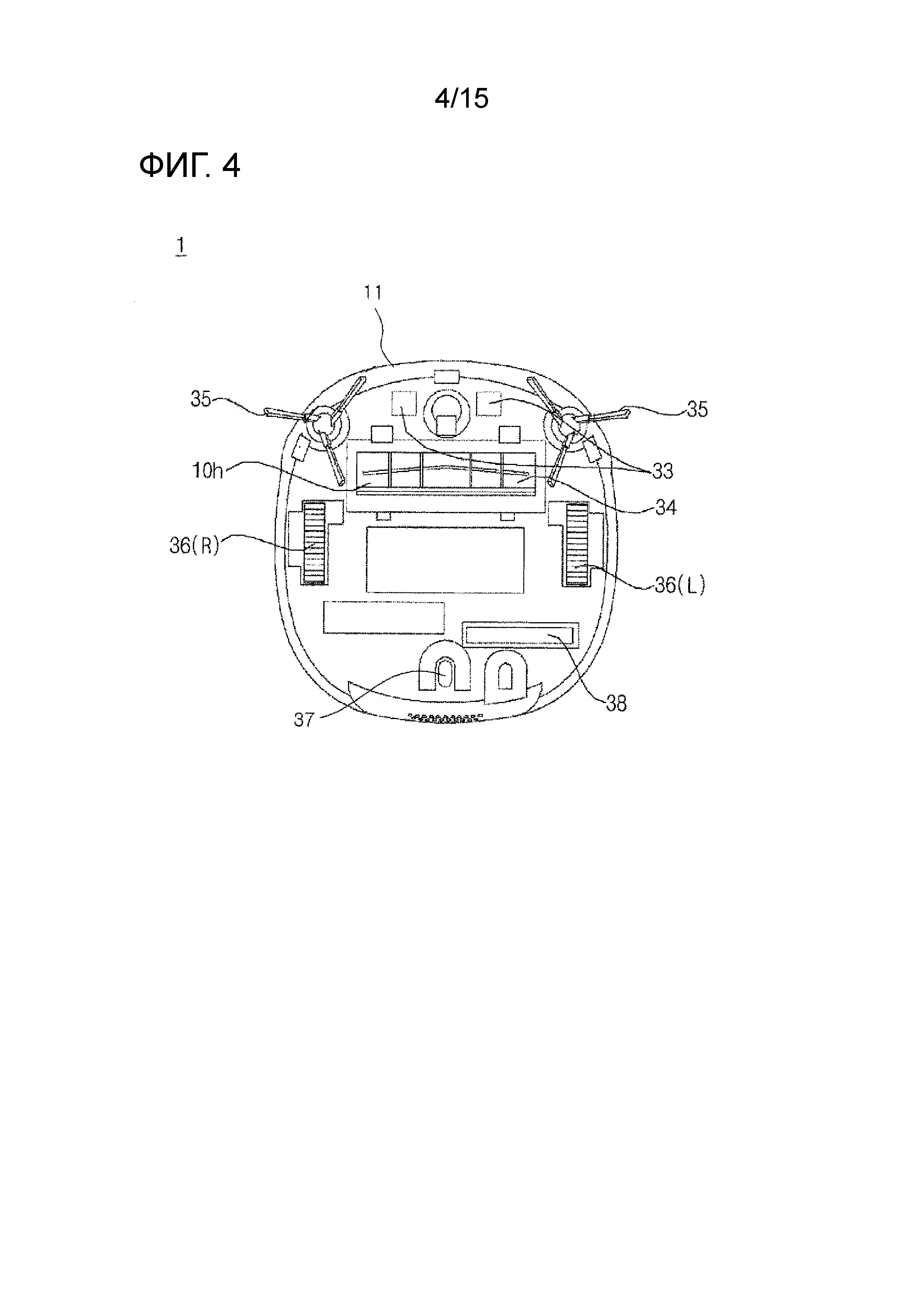
Фиг. 4 представляет собой вид снизу робота-пылесоса с Фиг. 1.
Фиг. 5 представляет собой блок-конфигурацию, на которой показаны основные элементы робота-пылесоса с Фиг. 1.
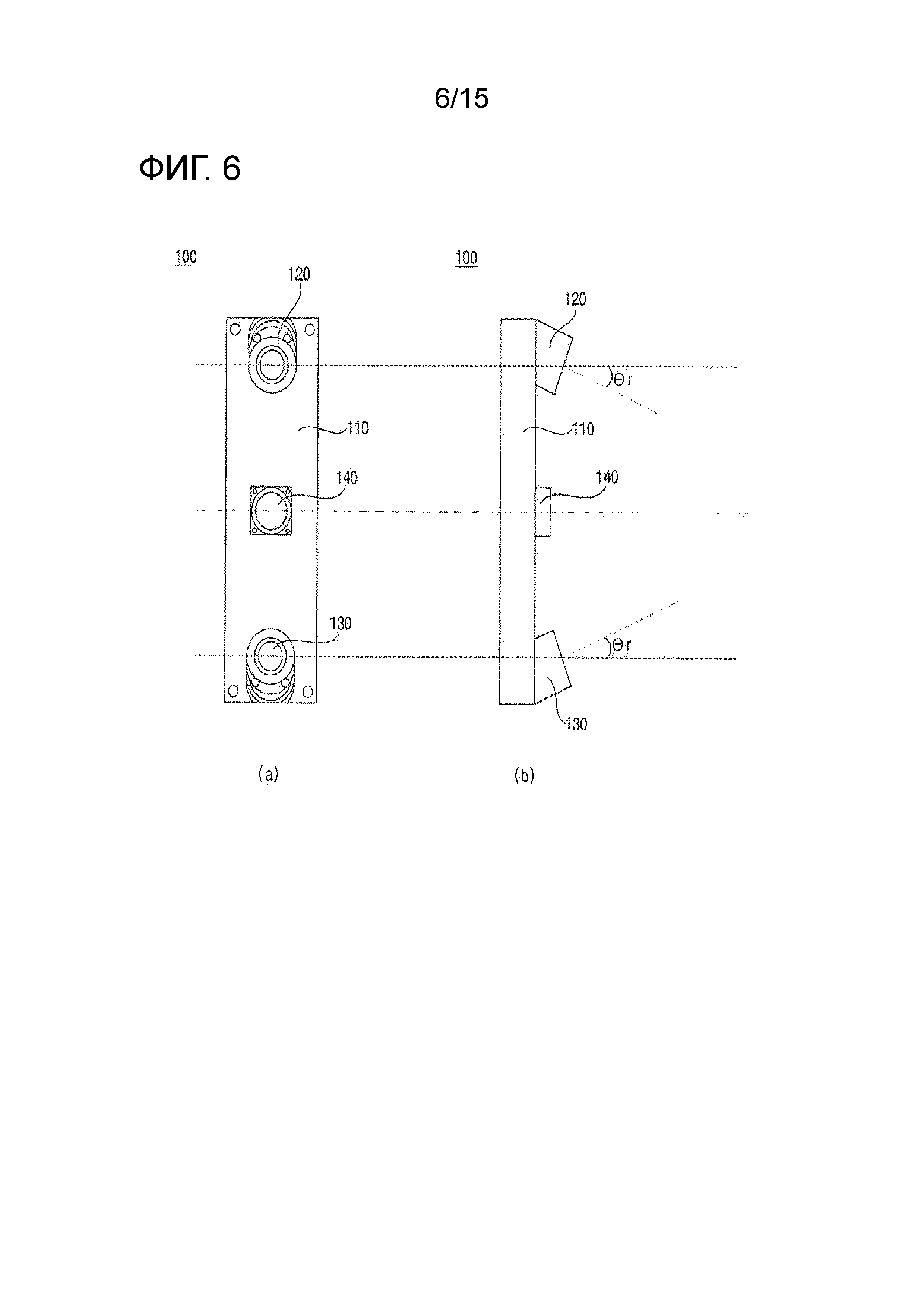
На Фиг. 6 показаны вид (a) спереди и вид (b) сбоку датчика препятствия.
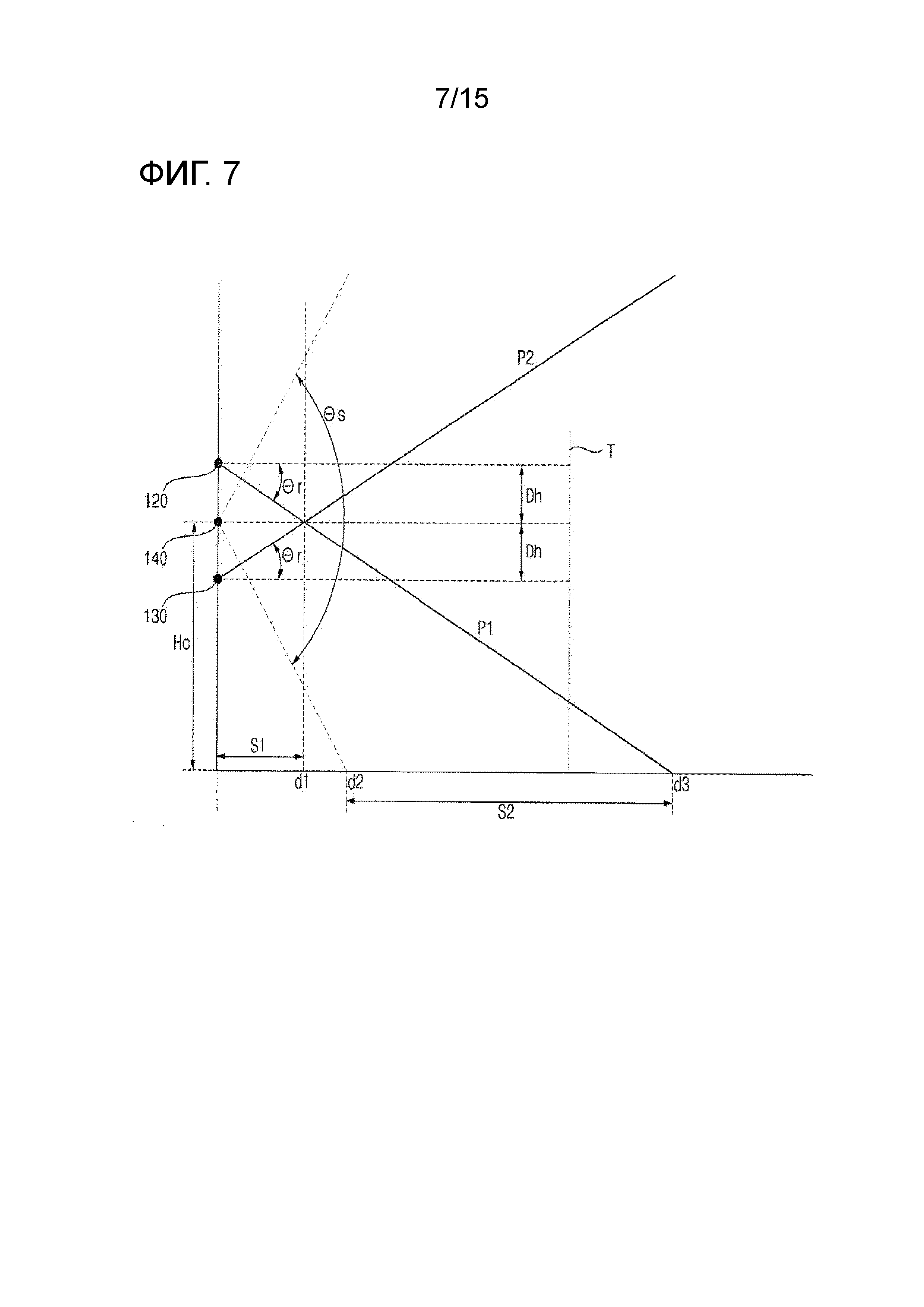
Фиг. 7 представляет собой вид, на котором показаны диапазон излучения и диапазон определения препятствия датчика препятствия.
На Фиг. 8 показаны вид (a), иллюстрирующий свет согласно первой конфигурации, отображаемый на полученном изображении в процессе калибровки блока испускания согласно первой конфигурации, и вид (b), иллюстрирующий свет согласно второй конфигурации, отображаемый на полученном изображении в процессе калибровки блока испускания согласно второй конфигурации.
На Фиг. 9 показаны вид (a), иллюстрирующий изображение, полученное, когда робот-пылесос находится в первом положении и препятствие находится спереди от робота-пылесоса, и вид (b), иллюстрирующий изображение, полученное, когда положение робота-пылесоса изменяется на второе положение.
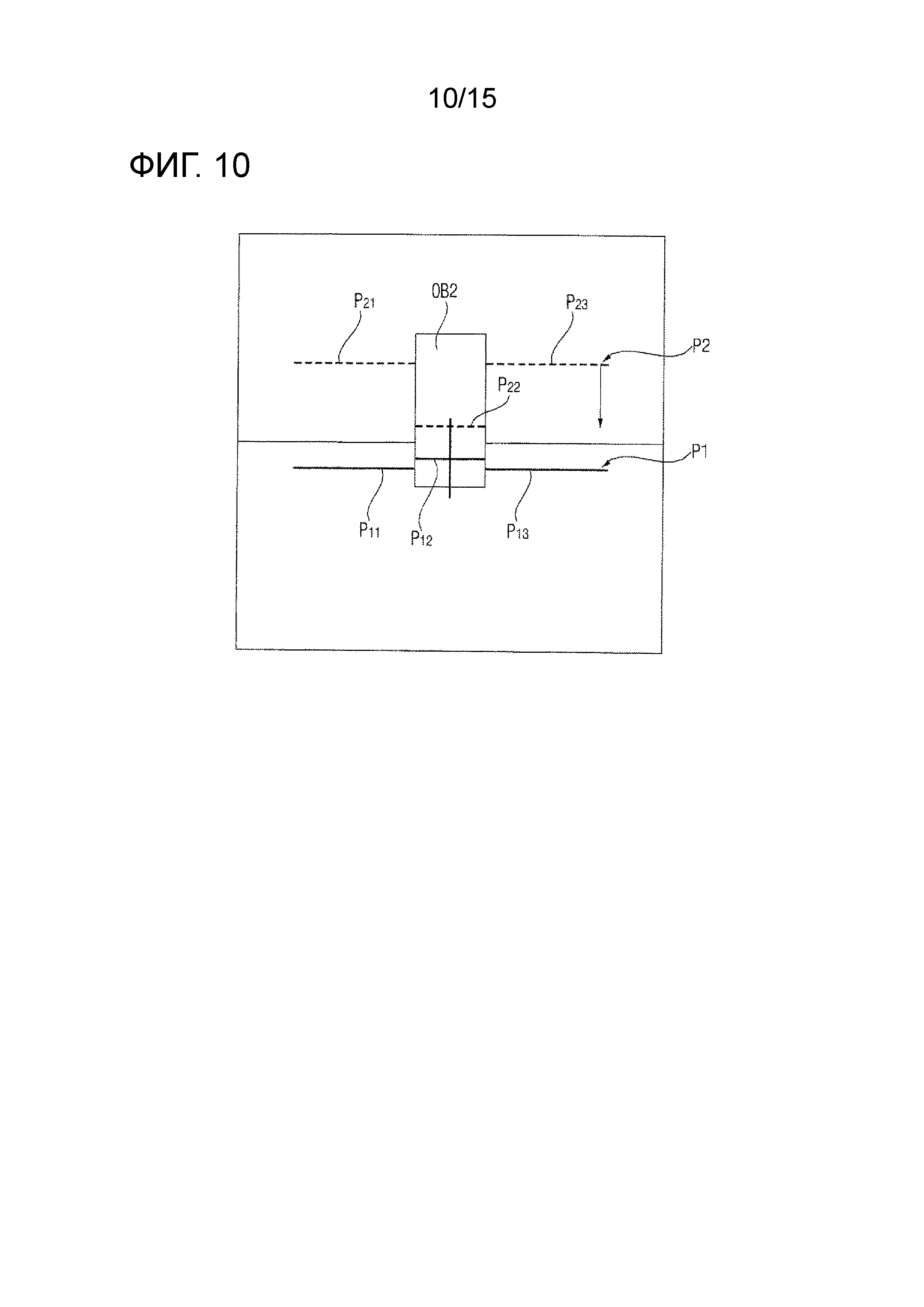
Фиг. 10 представляет собой вид, иллюстрирующий изображение, полученное, когда свет согласно первой конфигурации и свет согласно второй конфигурации падают на препятствие.
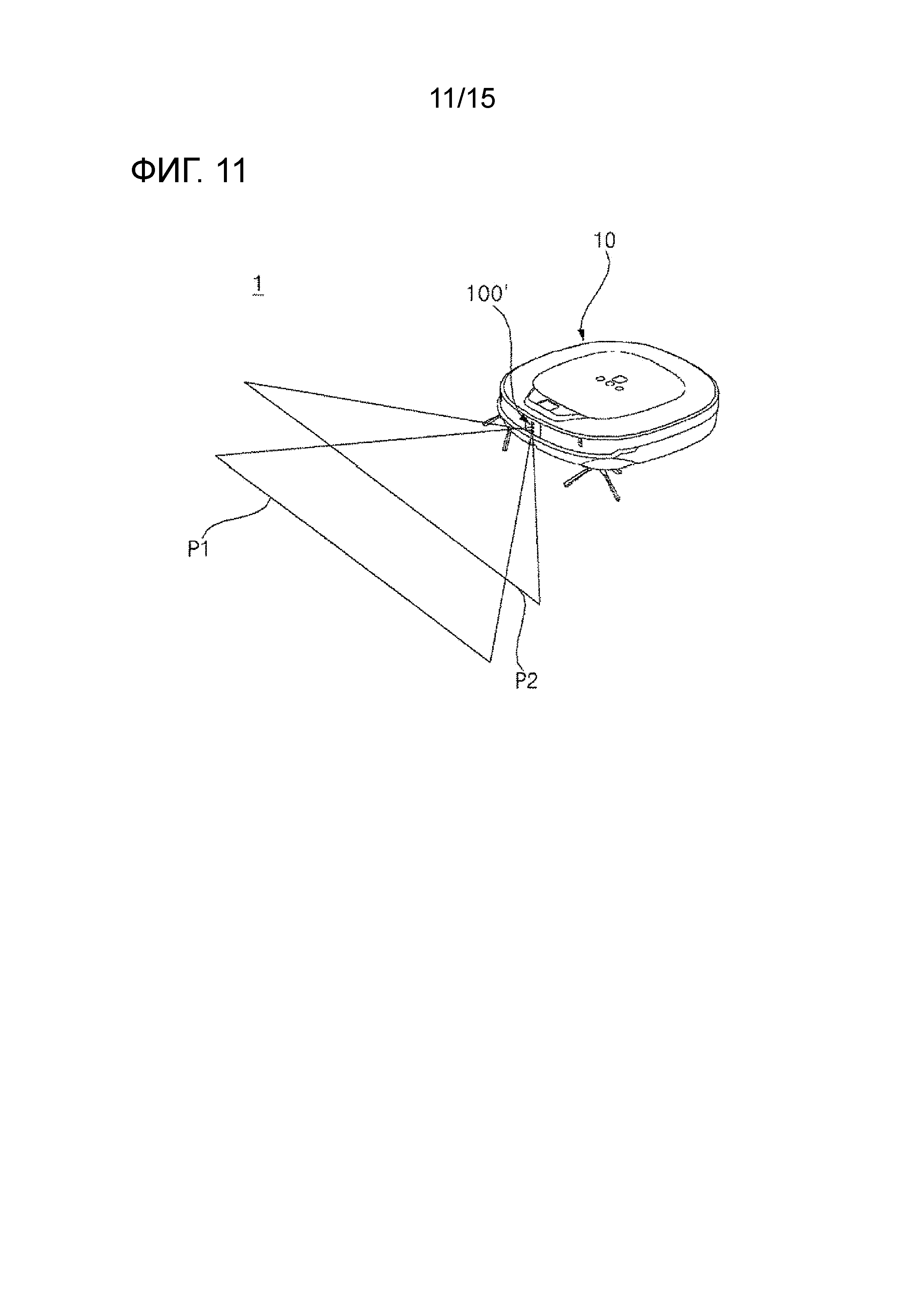
Фиг. 11 представляет собой вид в перспективе робота-пылесоса согласно другому варианту осуществления настоящего изобретения.
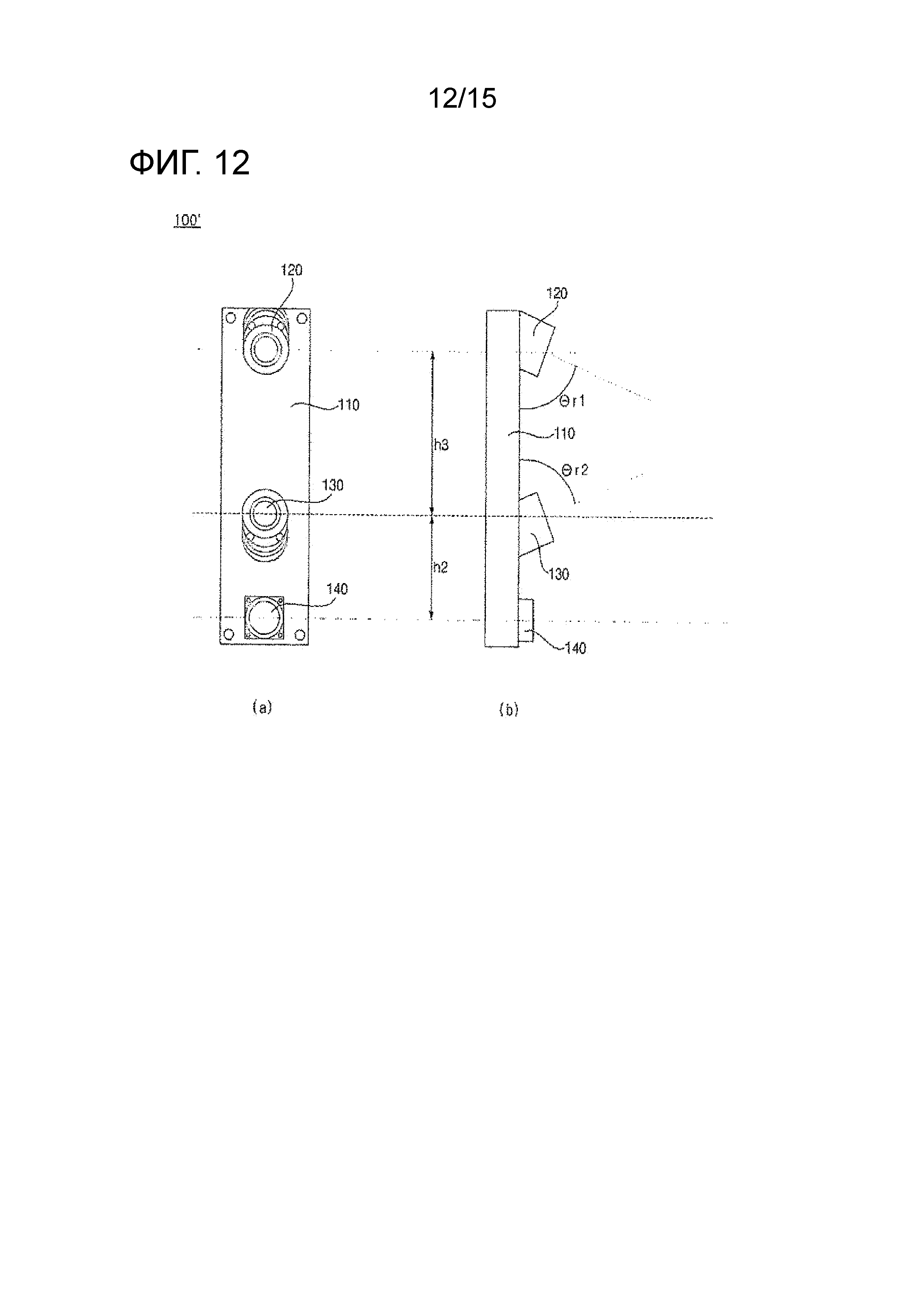
На Фиг. 12 показаны вид (a) спереди и вид (b) сбоку датчика препятствия, показанного на Фиг. 11.
Фиг. 13 представляет собой вид, иллюстрирующий диапазон излучения и диапазон определения препятствия датчика препятствия с Фиг. 12.
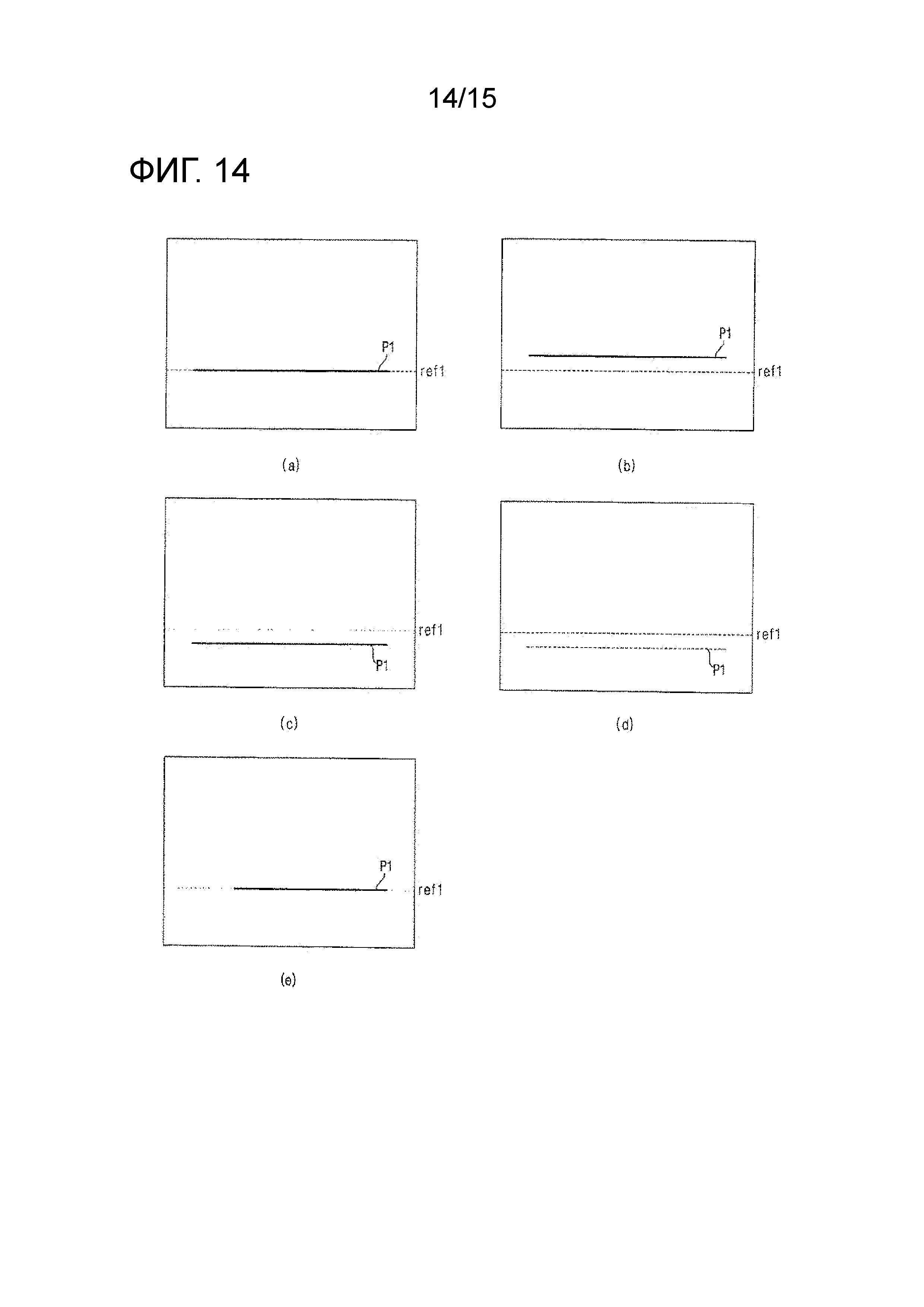
На Фиг. 14 показаны виды, иллюстрирующие конфигурации света, испускаемого блоком испускания согласно первой конфигурации датчика препятствия с Фиг. 12.
На Фиг. 15 показаны виды, иллюстрирующие конфигурации света, испускаемого к препятствию в роботах-пылесосах согласно вариантам осуществления настоящего изобретения.
Подробное описание вариантов осуществления настоящего изобретения
Преимущества и признаки настоящего изобретения и способы их достижения будут понятны из приведенного далее подробного описания вариантов осуществления со ссылкой на прилагаемые чертежи. Тем не менее, настоящее изобретение может быть осуществлено во множестве различных форм и не должно быть понято как ограниченное вариантами осуществления, изложенными в этом документе. Наоборот, эти варианты осуществления даны для полного и подробного понимания настоящего изобретения и полностью передают объем изобретения специалистам в данной области техники. Настоящее изобретение определено только объемом прилагаемой формулы изобретения. В описании одинаковые составляющие элементы обозначены одинаковыми ссылочными позициями.
Фиг. 1 представляет собой вид в перспективе робота-пылесоса согласно варианту осуществления настоящего изобретения. Фиг. 2 представляет собой вид, на котором показан угол горизонтального обзора робота-пылесоса с Фиг. 1. Фиг. 3 представляет собой вид спереди робота-пылесоса с Фиг. 1. Фиг. 4 представляет собой вид снизу робота-пылесоса с Фиг. 1. Фиг. 5 представляет собой блок-конфигурацию, на которой показаны основные элементы робота-пылесоса с Фиг. 1. На Фиг. 6 показаны вид (a) спереди и вид (b) сбоку датчика препятствия. Фиг. 7 представляет собой вид, на котором показаны диапазон излучения и диапазон определения препятствия датчика препятствия.
Как видно на Фиг. 1-7, робот-пылесос 1 согласно варианту осуществления настоящего изобретения может включать в себя основной корпус 10, который перемещается по полу в очищаемой зоне и всасывает с пола посторонние вещества, такие как пыль, и датчик 100 препятствия, предусмотренный на передней поверхности основного корпуса 10.
Основной корпус 10 может включать в себя кожух 11, который образует внешний вид основного корпуса 10 и образует внутри себя пространство, в котором расположены составляющие элементы основного корпуса 10, всасывающий узел 34, который предусмотрен в кожухе 11 для всасывания посторонних веществ, таких как пыль или мусор, и левое колесо 36L и правое колесо 36R, которые предусмотрены с возможностью вращения на кожухе 11. Основной корпус 10 перемещается по полу в очищаемой зоне посредством вращения левого колеса 36L и правого колеса 36R, и в этом процессе, посторонние вещества всасываются в основной корпус 10 через всасывающий узел 34.
Всасывающий узел 34 может включать в себя всасывающий вентилятор (не показан), который образует всасывающую силу, и всасывающее окно 10h, через которое всасывается поток воздуха, образованный посредством вращения всасывающего вентилятора. Всасывающий узел 34 может дополнительно включать в себя a фильтр (не показан), который собирает посторонние вещества из потока воздуха, всасываемого через всасывающее окно 10h, и контейнер для сбора посторонних веществ (не показан), в котором скапливаются посторонние вещества, собранные посредством фильтра.
К тому же, основной корпус 10 может включать в себя узел 300 привода перемещения, который приводит левое колесо 36L и правое колесо 36R. Узел 300 привода перемещения может включать в себя по меньшей мере один приводной двигатель. По меньшей мере один приводной двигатель может включать в себя двигатель привода левого колеса, выполненный с возможностью вращения левого колеса 36L, и двигатель привода правого колеса, выполненный с возможностью вращения правого колеса 36R.
Контроллер 200 может включать в себя контроллер 230 перемещения, который управляет узлом 300 привода перемещения. Контроллер 230 перемещения может вызывать перемещение основного корпуса 10 вперед или назад или его вращение посредством отдельного управления работой двигателя привода левого колеса и двигателя привода правого колеса. Например, двигатель привода левого колеса и двигатель привода правого колеса вращаются в одинаковом направлении для приведения основного корпуса 10 в перемещение вперед, и направление перемещения основного корпуса 10 может быть изменено, когда двигатель привода левого колеса и двигатель привода правого колеса вращаются с разными скоростями или в противоположных направлениях. На основном корпусе 10 может быть дополнительно предусмотрено по меньшей мере одно вспомогательное колесо 37 для устойчивого поддерживания основного корпуса 10.
Блок 240 обработки информации хранит введенное полученное изображение от датчика 100 препятствия, опорную информацию, используемую получателем 220 информации о препятствии для определения препятствия, и информацию о препятствии, относящуюся к воспринимаемому препятствию. К тому же, блок 240 обработки информации может хранить управляющую информацию, используемую для управления работой робота-пылесоса 1, информацию, относящуюся к режимам очистки робота-пылесоса 1, и карту, которая образуется в роботе-пылесосе 1 или принимается от внешнего источника.
Чистящий блок 310 управляет щетками для легкого всасывания пыли или посторонних веществ вокруг робота-пылесоса 1, и управляет всасывающим узлом для всасывания пыли или посторонних веществ. Чистящий блок 310 управляет работой всасывающего вентилятора, предусмотренного во всасывающем узле 34, который всасывает посторонние вещества, такие как пыль или мусор, посредством этого приводя к подаче пыли в контейнер для сбора посторонних веществ через всасывающее окно.
К тому же, блок 240 обработки информации может хранить информацию, читаемую микропроцессором, и может включать в себя жесткий диск (Hard Disk Drive (HDD)), твердотельный диск (Solid State Disk (SSD)), интегральный диск (Silicon Disk Drive (SDD)), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), компакт-диск постоянной памяти (CD-ROM), магнитную ленту, гибкий магнитный диск и устройство оптического хранения информации.
На передней стороне нижней поверхности кожуха 11 могут быть предусмотрены щетки 35. Каждая из щеток 35 может включать в себя множество лопастей или щетин, которые проходят в радиальном направлении. Пыль удаляется с пола в очищаемой зоне посредством вращения щеток 35, и, в свою очередь, пыль, удаленная с пола, всасывается через всасывающее окно 10h для собирания в собирающем контейнере.
На верхней поверхности кожуха 11 может быть предусмотрена панель 39 управления для принятия от пользователя различных команд для управления роботом-пылесосом 1.
В основном корпусе 10 предусмотрена перезаряжаемая батарея 38. Заряжание батареи 38 может быть выполнено, когда зарядный вывод 33 батареи 38 соединен с электросетью общего пользования (например, с разъемом электропитания в доме), или когда основной корпус 10 состыкован с отдельной зарядной станцией (не показана), которая соединена с электросетью общего пользования, в результате чего зарядный вывод 33 находится в электрическом соединении с электросетью общего пользования. Потребляющие электричество элементы робота-пылесоса 1 могут принимать энергию от батареи 38, и, таким образом, робот-пылесос 1 может выполнять автономное перемещение, когда батарея 38 заряжена, даже если робот-пылесос 1 не находится в электрическом соединении с электросетью общего пользования.
На передней поверхности основного корпуса 10 может быть предусмотрен датчик 100 препятствия. Датчик 100 препятствия включает в себя блок 120 испускания согласно первой конфигурации, блок 130 испускания согласно второй конфигурации, и блок 140 получения изображения. Блок 140 получения изображения захватывает изображение заданной области спереди от основного корпуса 10. Блок 120 испускания согласно первой конфигурации испускает первую конфигурацию света вниз к области. Блок 130 испускания согласно второй конфигурации предусмотрен под блоком 120 испускания согласно первой конфигурации и испускает вторую конфигурацию света вверх к области.
Говоря подробнее, как видно на Фиг. 6, датчик 100 препятствия может дополнительно включать в себя раму 110 модуля, которая прикреплена к передней поверхности кожуха 11 и является продолговатой в вертикальном направлении. Блок 120 испускания согласно первой конфигурации, блок 130 испускания согласно второй конфигурации и блок 140 получения изображения могут быть прикреплены к раме 110 модуля. В некоторых вариантах осуществления, блок 120 испускания согласно первой конфигурации, блок 130 испускания согласно второй конфигурации и/или блок 140 получения изображения могут быть прикреплены непосредственно к кожуху 11 без рамы 110 модуля.
Каждый из блоков 120 и 130 испускания конфигурации может включать в себя источник света и элемент проецирования оптической конфигурации (optical pattern projection element (OPPE)), который образует заданную конфигурацию при прохождении через него света, испущенного источником света. Источник света может представлять собой лазерный диод (laser diode (LD)), светоизлучающий диод (light-emitting diode (LED)), и тому подобное. Лазерный свет имеет прекрасные свойства монохроматичности, прямолинейности и когерентности по сравнению с другими источниками света, посредством этого обеспечивая точное измерение расстояния. В частности, поскольку инфракрасный свет или видимый свет имеет высокое отклонение точности при измерении расстояния в зависимости от таких факторов как цвет и материал целевого объекта, в качестве источника света может быть использован лазерный диод. OPPE может включать в себя линзу и дифракционный оптический элемент (diffractive optical element (DOE)). В зависимости от конфигурации OPPE, содержащегося в каждом из блоков 120 и 130 испускания конфигурации, свет может быть испущен в различных конфигурациях.
Блок 120 испускания согласно первой конфигурации может испускать первую конфигурацию света P1 (далее называемого светом согласно первой конфигурации) вперед и вниз от основного корпуса 10. Таким образом, свет P1 согласно первой конфигурации может падать на пол в очищаемой зоне. Свет P1 согласно первой конфигурации может иметь крестообразную конфигурацию, которая включает в себя горизонтальную линию Ph и вертикальную линию Pv, которые пересекаются.
Блок 120 испускания согласно первой конфигурации, блок 140 получения изображения и блок 130 испускания согласно второй конфигурации могут быть расположены на одной прямой относительно друг друга. Блок 140 получения изображения может быть расположен между блоком 120 испускания согласно первой конфигурации и блоком 130 испускания согласно второй конфигурации, но это не является ограничением.
В варианте осуществления, блок 120 испускания согласно первой конфигурации может быть расположен над блоком 140 получения изображения и может испускать свет P1 согласно первой конфигурации вперед и вниз от основного корпуса 10 с обеспечением восприятия препятствия, которое расположено ниже, чем блок 120 испускания согласно первой конфигурации. Блок 130 испускания согласно второй конфигурации может быть расположен под блоком 140 получения изображения и может испускать вторую конфигурацию света P2 (далее в этом документе называемого светом согласно второй конфигурации) вперед и вверх от основного корпуса 10. Таким образом, свет P2 согласно второй конфигурации может падать на стену или по меньшей мере на часть препятствия, которое расположено в положении выше, чем по меньшей мере блок 130 испускания согласно второй конфигурации, от пола в очищаемой зоне.
Свет P2 согласно второй конфигурации может иметь конфигурацию, отличающуюся от конфигурации света P1 согласно первой конфигурации, и может включать в себя, например, горизонтальную линию. Горизонтальная линия не обязательно может быть непрерывной линией, и может быть пунктирной линией, как показано на чертежах.
На Фиг. 2, ʺθhʺ обозначает горизонтальный угол испускания света P1 согласно первой конфигурации, испускаемого из блока 120 испускания согласно первой конфигурации. Горизонтальный угол испускания представляет угол, образованный между обоими концами горизонтальной линии Ph и блоком 120 испускания согласно первой конфигурации. Горизонтальный угол испускания может быть задан в диапазоне 130-140°, но это не является ограничением. Пунктирная линия на Фиг. 2 представляет направление вперед от робота-пылесоса 1, и свет P1 согласно первой конфигурации может быть образован симметричным по отношению к пунктирной линии.
Подобно блоку 120 испускания согласно первой конфигурации, горизонтальный угол испускания блока 130 испускания согласно второй конфигурации может быть задан в диапазоне 130-140°, и в некоторых вариантах осуществления свет P2 согласно второй конфигурации может быть испущен под таким же горизонтальным углом испускания, что и у блока 120 испускания согласно первой конфигурации. В этом случае, свет P2 согласно второй конфигурации также может быть образован симметричным относительно пунктирной линии на Фиг. 2.
Блок 140 получения изображения может получать изображение спереди от основного корпуса 10. В частности, свет по конфигурациям P1 и P2 показывается в изображении (далее называемом полученным изображением), получаемом посредством блока 140 получения изображения. Далее в этом документе, изображения света по конфигурациям P1 и P2, показываемые в полученном изображении, называются оптическими конфигурациями. Поскольку оптические конфигурации представляют собой изображения, проецируемые на датчик изображения, конфигурации света P1 и P2, падающего на фактическое пространство, оптические конфигурации обозначены такими же ссылочными позициями, что и конфигурации света P1 и P2. Изображение, соответствующее свету P1 согласно первой конфигурации, и изображение, соответствующее свету P2 согласно второй конфигурации, соответственно обозначены как первая оптическая конфигурация P1 и вторая оптическая конфигурация P2.
Блок 140 получения изображения может включать в себя цифровую камеру, которая преобразует изображение предмета в электрический сигнал, преобразует электрический сигнал в цифровой сигнал и затем хранит цифровой сигнал в запоминающем устройстве. Цифровая камера может включать в себя датчик изображения (не показан) и модуль обработки изображения (не показан).
Датчик изображения представляет собой устройство, которое преобразует оптическое изображение в электрический сигнал и выполнено как микросхема, имеющая множество встроенных в нее фотодиодов. Например, фотодиоды могут представлять собой элементы изображения. Когда свет, прошедший через линзу, образует изображение на микросхеме, в соответствующих элементах изображения накапливаются заряды, и заряды, накопленные в элементах изображения, преобразуются в электрический сигнал (например, напряжение). Как хорошо известно, в качестве датчика изображения может быть использован прибор с зарядной связью (charge coupled device (CCD)), комплементарный металлооксидный полупроводник (complementary metal oxide semiconductor (CMOS)), и тому подобное.
Модуль обработки изображения образует цифровое изображение на основе выходного аналогового сигнала от датчика изображения. Модуль обработки изображения может включать в себя аналого-цифровой преобразователь, выполненный с возможностью преобразования аналогового сигнала в цифровой сигнал, буферное запоминающее устройство, выполненное с возможностью временной записи цифровой информации согласно выходному цифровому сигналу от аналого-цифрового преобразователя, и процессор цифровой обработки сигналов (digital signal processor (DSP)), выполненный с возможностью образования цифрового изображения посредством обработки информации, записанной в буферном запоминающем устройстве.
К тому же, робот-пылесос 1 может включать в себя блок хранения информации (не показан), который хранит информацию, читаемую микропроцессором и выполнен как жесткий диск (Hard Disk Drive (HDD)), твердотельный диск (Solid State Disk (SSD)), интегральный диск (Silicon Disk Drive (SDD)), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), компакт-диск постоянной памяти (CD-ROM), магнитная лента, гибкий магнитный диск и устройство оптического хранения информации.
Контроллер 200 может включать в себя устройство 210 извлечения конфигурации, которое определяет оптические конфигурации P1 и P2 из изображения (полученного изображения), полученного посредством блока 140 получения изображения. Устройство 210 извлечения конфигурации может определять признаки, такие как точки, линии и плоскости, по отношению к заданным элементам изображения, которые составляют полученное изображение, и может определять оптические конфигурации P1 и P2 или точки, линии и плоскости, составляющие оптические конфигурации P1 и P2, на основании определенных признаков.
Например, устройство 210 извлечения конфигурации может извлекать сегменты линии, образованные последовательными элементами изображения, которые ярче, чем окружающая среда, посредством этого извлекая горизонтальную линию Ph и вертикальную линию Pv, которые образуют первую оптическую конфигурацию P1, и горизонтальную линию P2, которая образует вторую оптическую конфигурацию P2.
Тем не менее, настоящее изобретение не ограничено этим, и в настоящее время известны различные способы извлечения требуемой конфигурации из цифрового изображения. Таким образом, устройство 210 извлечения конфигурации может извлекать первую оптическую конфигурацию P1 и вторую оптическую конфигурацию P2 с использованием одной из этих известных технологий.
Далее в этом документе, угол, образованный между направлением, в котором блок 120 испускания согласно первой конфигурации или блок 130 испускания согласно второй конфигурации испускает свет, и горизонтальной линией, называется вертикальным углом испускания. В частности, вертикальный угол испускания может быть образован как угол между направлением, в котором ориентирована оптическая ось линзы, содержащейся в каждом из блоков 120 и 130 испускания конфигурации, и горизонтальной линией.
Блок 120 испускания согласно первой конфигурации и блок 130 испускания согласно второй конфигурации могут быть расположены симметрично в вертикальном направлении. В частности, блок 120 испускания согласно первой конфигурации и блок 130 испускания согласно второй конфигурации могут быть расположены вдоль заданной вертикальной линии, блок 120 испускания согласно первой конфигурации может испускать свет P1 согласно первой конфигурации вниз под первым вертикальным углом испускания, и блок 130 испускания согласно второй конфигурации может испускать свет P2 согласно второй конфигурации вверх под вторым вертикальным углом испускания. По меньшей мере один из первого вертикального угла испускания и второго вертикального угла испускания может быть задан в диапазоне 20-30°, но это не является ограничением.
Первый вертикальный угол испускания и второй вертикальный угол испускания могут иметь одинаковую величину θr. Тем не менее, настоящее изобретение этим не ограничено. В некоторых вариантах осуществления, первый вертикальный угол испускания и второй вертикальный угол испускания могут иметь величины, отличающиеся друг от друга. В частности, θr может быть задан в диапазоне 20-30°, но это не является ограничением.
Блок 120 испускания согласно первой конфигурации и блок 130 испускания согласно второй конфигурации могут быть расположены симметрично по отношению к блоку 140 получения изображения. Как видно на Фиг. 7, блок 120 испускания согласно первой конфигурации может находиться на расстоянии Dh в направлении вверх от блока 140 получения изображения, и блок 130 испускания согласно второй конфигурации может находиться на таком же расстоянии Dh в направлении вниз от блока 140 получения изображения. Далее в этом документе, угол, образованный между направлением, в котором блок 120 испускания согласно первой конфигурации или блок 130 испускания согласно второй конфигурации испускает свет, и горизонтальной линией называется вертикальным углом испускания. В частности, вертикальный угол испускания может быть определен как угол, образованный между направлением, в котором ориентирована оптическая ось линзы, содержащейся в каждом из блоков 120 и 130 испускания конфигурации, и горизонтальной линией.
В этой схеме, согласно которой блок 120 испускания согласно первой конфигурации и блок 130 испускания согласно второй конфигурации расположены симметрично по отношению к блоку 140 получения изображения и испускают свет под одинаковым вертикальным углом θr испускания в противоположных направлениях, может быть легко выполнена калибровка или приведение продукта в исходное состояние.
Когда свет, испускаемый из блока 120 испускания согласно первой конфигурации и/или блока 130 испускания согласно второй конфигурации, падает на препятствие, положения оптических конфигураций P1 и P2 в полученном изображении изменяются в зависимости от расстояния от блока 120 испускания согласно первой конфигурации до препятствия. Например, когда свет P1 согласно первой конфигурации и свет P2 согласно второй конфигурации падают на конкретное препятствие, если препятствие расположено ближе к роботу-пылесосу 1, первая оптическая конфигурация P1, в частности, горизонтальная конфигурация Ph, отображается в более высоком положении в полученном изображении, тогда как вторая оптическая конфигурация P2 отображается в более низком положении в полученном изображении. То есть, информация о расстояниях до препятствий, которая соответствует рядам (линиям, выполненным как элементы изображения, расположенные в поперечном направлении), составляющим изображение, образованное посредством блока 140 получения изображения, хранится заранее. Когда оптические конфигурации P1 и P2, определенные в изображении, полученном посредством блока 140 получения изображения, определяются в конкретном ряде, положение препятствия может быть оценено на основании информации о расстоянии до препятствия, которая соответствует ряду.
Предварительным условием для аккуратного выполнения описанного выше процесса является расположение блока 120 испускания согласно первой конфигурации и блока 130 испускания согласно второй конфигурации, обеспечивающее точное испускание света под заданным вертикальным углом θr испускания. Обеспечение этого предварительного условия может быть проверено в процессе калибровки. Процесс калибровки может быть выполнен следующим образом.
Датчик 100 препятствия неподвижно закреплен, и вертикальная пластина T для падения (смотри Фиг. 7), имеющая плоскость, которая обращена к датчику 100 препятствия, расположена на заданном расстоянии спереди от датчика 100 препятствия. Пластина T для падения может быть расположена в положении, в котором падает свет P1 согласно первой конфигурации.
В этом состоянии, блок 120 испускания согласно первой конфигурации испускает свет, и блок 140 получения изображения получает изображение. Первая оптическая конфигурация P1, падающая на пластину T для падения, отображается в полученном изображении. Здесь, поскольку расстояние от датчика 100 препятствия до пластины T для падения уже известно, горизонтальная линия Ph первой оптической конфигурации P1 отображается в заданном положении ref1 (далее в этом документе называемом опорным положением) на полученном изображении, если датчик 100 препятствия изготовлен нормально, без дефектов.
Как видно на Фиг. 7, опорное положение ref1 представляет собой ориентир для определения нормального состояния, то есть, состояния, в котором перед роботом-пылесосом отсутствует препятствие и в котором пол, на котором находится робот-пылесос, является плоским. Опорное положение ref1 представляет собой положение, в котором отображается первая оптическая конфигурация P1, когда основной корпус 10 находится на плоском полу. Когда первая оптическая конфигурация P1 испускается к d3, блок 140 получения изображения находится в положении, в котором захватывается изображение первой оптической конфигурации P1.
На Фиг. 8(a) показана первая оптическая конфигурация P1, отображаемая в полученном изображении в описанном выше процессе, и показан случай, в котором в опорном положении ref1 определена горизонтальная линия Ph.
После этого обследуется направление, в котором блок 130 испускания согласно второй конфигурации испускает свет. Этот процесс может быть выполнен посредством повторения описанного выше процесса калибровки после переворачивания датчика 100 препятствия вниз головой. То есть, после переворачивания датчика 100 препятствия вниз головой, в результате чего блок 130 испускания согласно второй конфигурации расположен над блоком 140 получения изображения и испускает свет, блок 140 получения изображения получает изображение, на котором отображается вторая оптическая конфигурация P2, сфокусированная на пластине T для падения. В этом случае, когда блок 130 испускания согласно второй конфигурации находится в нормальном состоянии, вторая оптическая конфигурация P2 определяется в опорном положении ref1. Тем не менее, когда блок 130 испускания согласно второй конфигурации не находится в нормальном состоянии, например, когда в полученном изображении вторая оптическая конфигурация P2 отображается в положении выше, чем опорное положение ref1, на расстояние Δg, как видно на Фиг. 8(b), вертикальный угол испускания блока 130 испускания согласно второй конфигурации меньше, чем заданная величина θr. В этом случае, вертикальный угол испускания блока 130 испускания согласно второй конфигурации может быть отрегулирован.
Тем не менее, когда Δg находится в заданном поле допуска, Δg может храниться в блоке хранения информации и может быть использована для компенсации положения второй оптической конфигурации P2, когда вычисляется расстояние до препятствия от положения, в котором на полученном изображении отображается вторая оптическая конфигурация P2. Следовательно, расстояние до препятствия может быть вычислено более точно.
Блок 140 получения изображения выровнен так, что оптическая ось линзы ориентирована в горизонтальном направлении, и ʺθrʺ, показанная на Фиг. 7, обозначает угол зрения блока 140 получения изображения и имеет заданную величину 100° или более, в частности, лежит в диапазоне 100-110°, но не ограничена этим.
Расстояние от пола в очищаемой зоне до блока 140 получения изображения может лежать в диапазоне приблизительно от 145 мм приблизительно до 155 мм. В этом случае, в изображении, полученном посредством блока 140 получения изображения, пол в очищаемой зоне может появляться после положения, обозначенного d2, и ʺS2ʺ обозначает область пола, появляющуюся на полученном изображении, от положения d2 до положения d3, которое представляет собой центр первой оптической конфигурации P1 (пересечение горизонтальной линии Ph и вертикальной линии Pv). В частности, когда препятствие расположено в области S2, блок 140 получения изображения может получать изображение препятствия, на которое падает свет P1 согласно первой конфигурации. Здесь, расстояние от основного корпуса 10 до d2 может быть задано в диапазоне 100-120 мм, и d3 может быть расположено на расстоянии приблизительно 400 мм от робота-пылесоса 1, но это не является ограничением.
К тому же, на Фиг. 7, ʺS1ʺ обозначает область, в которой положения первой оптической конфигурации P1 и второй оптической конфигурации P2 обращены (область от робота-пылесоса 1 до положения d1). Когда препятствие расположено в области S1, на полученном изображении свет P1 согласно первой конфигурации расположен над светом P2 согласно второй конфигурации. Здесь, d1 может представлять собой положение, которое находится от робота-пылесоса 1 на расстоянии, лежащем в диапазоне 70-80 мм, но это не является ограничением.
На Фиг. 9 показан вид (a), иллюстрирующий изображение, полученное, когда робот-пылесос расположен в первом положении и первое препятствие находится спереди от робота-пылесоса, и вид (b), иллюстрирующий изображение, полученное, когда положение робота-пылесоса изменяется на второе положение.
Когда в очищаемой зоне присутствует препятствие OB1, такое как кровать, с пространством A, образованным между препятствием OB1 и полом, пространство A может быть распознано, и, в частности, может быть определена высота пространства A, посредством чего может быть принято решение о прохождении через препятствие OB1 или обхождении его.
Например, как видно на Фиг. 9(a), когда свет P1 согласно первой конфигурации падает на пол в пространстве A и свет P2 согласно второй конфигурации падает на конструкцию (например, раму, поддерживающую матрас кровати), находящуюся в пространстве A, получатель 220 информации о препятствии, содержащийся в контроллере 200, может распознать присутствие препятствия над частью, в которой падает свет P1 согласно первой конфигурации, и, в частности, может определить расстояние от робота-пылесоса 1 до препятствия OB1 на основе положения второй оптической конфигурации P2, отображаемой на полученном изображении. К тому же, поскольку вертикальный угол испускания блока 130 испускания согласно второй конфигурации является постоянным, получатель 220 информации о препятствии может определять высоту от пола в очищаемой зоне до части, в которой падает свет P2 согласно второй конфигурации, на основе расстояния до препятствия OB1. Соответственно, на основе этих типов информации, получатель 220 информации о препятствии может определять высоту пространства A. В частности, когда определено, что высота пространства A меньше, чем высота основного корпуса 10, контроллер 230 перемещения может управлять узлом 300 привода перемещения с обеспечением обхождения основным телом 10 препятствия OB1. С другой стороны, когда определено, что высота пространства A больше, чем высота основного корпуса 10, контроллер 230 перемещения может управлять узлом 300 привода перемещения с обеспечением вхождения основного корпуса 10 в пространство A или прохождения через него.
Как видно на Фиг. 9(b), когда вертикальная линия Pv света P1 согласно первой конфигурации проходит к стене, когда его горизонтальная линия Pv падает на пол, и когда свет P2 согласно второй конфигурации частично падает на препятствие OB1, в результате чего часть света P2 согласно второй конфигурации падает на препятствие OB1, а его другая часть падает на стену, информация о препятствии получается только на основе первой оптической конфигурации P1, отображаемой на полученном изображении, если блок 130 испускания согласно второй конфигурации не предусмотрен. В этом случае, может быть определен только факт того, что спереди от робота-пылесоса присутствует стена. Тем не менее, в иллюстративном варианте осуществления, предусмотрен блок 130 испускания согласно второй конфигурации, дополнительно определяющий, что между роботом-пылесосом 1 и стеной присутствует препятствие OB1. В частности, с использованием света P2 согласно второй конфигурации, включающего в себя горизонтальную линию Ph, препятствие OB1 может быть определено в более широкой области в горизонтальном направлении, таким образом, обеспечивая определение препятствия OB1, находящегося в области, которая не может быть достигнута вертикальной линией Pv света P1 согласно первой конфигурации.
Фиг. 10 представляет собой вид, на котором проиллюстрировано изображение, полученное, когда свет согласно первой конфигурации и свет согласно второй конфигурации падают на препятствие. Как видно на Фиг. 10, робот-пылесос 1 согласно варианту осуществления настоящего изобретения может точно определять стереоскопическую форму препятствия на основе света P2 согласно второй конфигурации, в дополнение к информации о препятствии, определяемой на основе света P1 согласно первой конфигурации. Например, фактическая высота препятствия OB2 является слишком большой для того, чтобы робот-пылесос 1 проходил над ним во время перемещения, но в конкретном положении робота-пылесоса 1 первая оптическая конфигурация P1 падает на нижнюю часть препятствия. В этом случае, если блок 130 испускания согласно второй конфигурации не предусмотрен, контроллер 230 перемещения определяет, что основной корпус 10 может пройти над препятствием OB2, и управляет основным телом 10 для перемещения к препятствию OB2. По мере того как основной корпус 10 перемещается ближе к препятствию OB2, положение второй оптической конфигурации P2 на полученном изображении постепенно увеличивается. При определении того, что высота препятствия OB2 превышает высоту, над которой может пройти основной корпус 10, контроллер 230 перемещения управляет узлом 300 привода перемещения с обеспечением обхождения основным телом 10 препятствия OB2.
Наоборот, в иллюстративном варианте осуществления, блок 130 испускания согласно второй конфигурации предусмотрен, и в текущем положении робота-пылесоса 1 свет P2 согласно второй конфигурации падает на препятствие OB2. Таким образом, высота препятствия OB2 может быть определена заранее, и путь перемещения также может быть дополнительно улучшен.
Получатель 220 информации о препятствии может распознавать обрыв, который расположен спереди от робота-пылесоса 1, на основе длины вертикальной линии Pv, отображаемой на полученном изображении. Когда спереди от робота-пылесоса 1 присутствует обрыв (например, лестница), передний конец вертикальной линии Pv может проходить к части под обрывом. Часть вертикальной линии Pv, которая испускается к части под обрывом, не отображается на полученном изображении, и, таким образом, длина вертикальной линии Pv, показанной на полученном изображении, уменьшается. Соответственно, когда длина вертикальной линии Pv уменьшается, получатель 220 информации о препятствии может определить, что спереди от робота-пылесоса 1 присутствует обрыв, и на основе распознанной таким образом информации об обрыве контроллер 230 перемещения может управлять узлом 300 привода перемещения с обеспечением перемещения робота-пылесоса 1 вдоль пути, который не ведет к обрыву.
Фиг. 11 представляет собой вид в перспективе робота-пылесоса согласно другому варианту осуществления настоящего изобретения. На Фиг. 12 показан вид спереди (a) и вид сбоку (b) датчика препятствия, показанного на Фиг. 11. Фиг. 13 представляет собой вид, на котором показан диапазон излучения и диапазон определения препятствия датчика препятствия с Фиг. 12. На Фиг. 14 показаны виды, иллюстрирующие конфигурации света, испускаемого блоком испускания согласно первой конфигурации датчика препятствия с Фиг. 12. На Фиг. 15 показаны виды, иллюстрирующие конфигурации света, испущенного к препятствию, в роботах-пылесосах согласно вариантам осуществления настоящего изобретения.
Как видно на Фиг. 11 и 12, датчик 100' препятствия включает в себя блок 120 испускания согласно первой конфигурации, блок 130 испускания согласно второй конфигурации и блок 140 получения изображения. Блок 140 получения изображения захватывает изображение заданной области спереди от основного корпуса 10. Блок 120 испускания согласно первой конфигурации испускает первую конфигурацию света вниз к области. Блок 130 испускания согласно второй конфигурации предусмотрен под блоком 120 испускания согласно первой конфигурации и испускает вторую конфигурацию света вверх к области.
Блок 120 испускания согласно первой конфигурации может испускать первую конфигурацию света P1 (далее в этом документе называемую светом согласно первой конфигурации) вперед и вниз от основного корпуса 10. Таким образом, свет P1 согласно первой конфигурации может падать на пол в очищаемой зоне. Свет P1 согласно первой конфигурации может иметь конфигурацию в форме горизонтальной линии. В качестве альтернативы, свет P1 согласно первой конфигурации может иметь крестообразную конфигурацию, которая включает в себя горизонтальную линию и вертикальную линию, которые пересекаются (смотри Фиг. 1).
Блок 120 испускания согласно первой конфигурации, блок 130 испускания согласно второй конфигурации и блок 140 получения изображения могут быть расположены на одной прямой относительно друг друга в вертикальном направлении. Блок 140 получения изображения расположен под блоком 120 испускания согласно первой конфигурации и блоком 130 испускания согласно второй конфигурации, но это не является ограничением. Блок 140 получения изображения может быть расположен над блоком испускания согласно первой конфигурации и блоком испускания согласно второй конфигурации.
В варианте осуществления, блок 120 испускания согласно первой конфигурации может быть расположен над блоком 130 испускания согласно второй конфигурации и может испускать свет P1 согласно первой конфигурации вперед и вниз от основного корпуса 10 с обеспечением восприятия препятствия, которое расположено ниже, чем блок 120 испускания согласно первой конфигурации. Блок 130 испускания согласно второй конфигурации может быть расположен под блоком 120 испускания согласно первой конфигурации и может испускать вторую конфигурацию света P2 (далее в этом документе называемую светом согласно второй конфигурации) вперед и вверх от основного корпуса 10. Таким образом, свет P2 согласно второй конфигурации может падать на стену или по меньшей мере на часть препятствия, которое расположено в более высоком положении, чем по меньшей мере блок 130 испускания согласно второй конфигурации, от пола в очищаемой зоне.
Свет P2 согласно второй конфигурации может иметь конфигурацию, отличающуюся от конфигурации света P1 согласно первой конфигурации, и может включать в себя, например, горизонтальную линию. Горизонтальная линия может не быть обязательно непрерывной линией и может быть пунктирной линией.
Подобно описанному выше варианту осуществления, горизонтальный угол θh испускания (смотри Фиг. 2) блока 120 испускания согласно первой конфигурации может быть задан в диапазоне 130-140°, но это не является ограничением. Подобно блоку 120 испускания согласно первой конфигурации, горизонтальный угол испускания блока 130 испускания согласно второй конфигурации может быть задан в диапазоне 130-140°. В некоторых вариантах осуществления, блок 130 испускания согласно второй конфигурации может испускать свет P2 по конфигурации под таким же горизонтальным углом испускания, что и блок 120 испускания согласно первой конфигурации.
Блок 140 получения изображения может получать изображение спереди от основного корпуса 10.
Как видно на Фиг. 13, блок 120 испускания согласно первой конфигурации и блок 130 испускания согласно второй конфигурации могут быть расположены симметрично. Блок 120 испускания согласно первой конфигурации и блок 130 испускания согласно второй конфигурации могут быть расположены в верхнем и нижнем положениях, при этом находясь друг от друга на расстоянии h3. Блок испускания согласно первой конфигурации испускает свет согласно первой конфигурации вниз, и блок испускания согласно второй конфигурации испускает свет согласно второй конфигурации вверх, в результате чего свет согласно первой конфигурации и свет согласно второй конфигурации пересекаются друг с другом.
Блок 140 получения изображения может находиться в направлении вниз на расстоянии h2 от блока испускания согласно второй конфигурации, и может захватывать изображение спереди от основного корпуса 10 под углом θs зрения относительно вертикального направления. Блок 140 получения изображения установлен на расстоянии h1 от пола. Блок 140 получения изображения может быть установлен в положении, в котором для захватывания изображения спереди от робота-пылесоса 1 отсутствуют препятствия, учитывая бампер (не показан), который образует нижний конец передней поверхности основного корпуса 10, или форму перемещающей или чистящей конструкции робота-пылесоса 1.
Блок 120 испускания согласно первой конфигурации или блок 130 испускания согласно второй конфигурации установлен так, что направление, в котором ориентирована оптическая ось линзы, содержащейся в каждом из блоков 120 и 130 испускания конфигурации, образует заданный угол испускания.
Блок 120 испускания испускает свет P1 согласно первой конфигурации вниз под первым вертикальным углом θr1 испускания, и блок 130 испускания испускает свет P2 согласно второй конфигурации вверх под вторым вертикальным углом θr2 испускания. Первый вертикальный угол испускания и второй вертикальный угол испускания отличаются друг от друга. Тем не менее, в некоторых вариантах осуществления, первый вертикальный угол испускания и второй вертикальный угол испускания могут быть заданы одинаковыми. В частности, первый вертикальный угол испускания и второй вертикальный угол испускания могут быть заданы в диапазоне 50-75°, но это не является ограничением. Например, первый вертикальный угол испускания может быть задан в диапазоне 60-70°, и второй вертикальный угол испускания может быть задан в диапазоне 50-55°. Эти углы могут быть изменены в зависимости от конструкции нижнего бампера робота-пылесоса 1, воспринимаемого расстояния до объекта под роботом-пылесосом 1 или воспринимаемой высоты.
Когда свет, испускаемый из блока 120 испускания согласно первой конфигурации и/или блока 130 испускания согласно второй конфигурации, падает на препятствие, положения оптических конфигураций P1 и P2 на полученном изображении могут меняться в зависимости от расстояния до препятствия от блока 120 испускания согласно первой конфигурации. Например, когда свет P1 согласно первой конфигурации и свет P2 согласно второй конфигурации падают на конкретное препятствие, поскольку препятствие расположено ближе к роботу-пылесосу 1, первая оптическая конфигурация P1 отображается в более высоком положении на полученном изображении, тогда как вторая оптическая конфигурация P2 отображается в более низком положении. То есть, информация о расстояниях до препятствий, которые соответствуют рядам (линиям, выполненным как элементы изображения, расположенные в поперечном направлении), составляющим изображение, образуемое блоком 140 получения изображения, хранится заранее. Когда в конкретном ряде определяются оптические конфигурации P1 и P2, определенные в изображении, получаемом блоком 140 получения изображения, положение препятствия может быть оценено на основе информации о расстоянии до препятствия, которая соответствует ряду.
Блок 140 получения изображения выровнен так, что оптическая ось линзы ориентирована в горизонтальном направление, и ʺθsʺ, показанный на Фиг. 13, обозначает угол зрения блока 140 получения изображения и задан равным 100° или более, в частности, в диапазоне 100-110°, но это не является ограничением.
К тому же, расстояние от пола в очищаемой зоне до блока 140 получения изображения может быть задано в диапазоне приблизительно 60-70 мм. На изображении, получаемом блоком 140 получения изображения, пол в очищаемой зоне может быть отображен после расстояния D1 от блока получения изображения. ʺD2ʺ обозначает расстояние до положения, в котором первая оптическая конфигурация P1 отображается на полу, появляющемся на полученном изображении. Когда на расстоянии D2 находится препятствие, блок 140 получения изображения может получать изображение препятствия, на которое падает свет P1 согласно первой конфигурации. Когда препятствие приближается к роботу-пылесосу 1 в пределах расстояния D2, первая оптическая конфигурация отображается над опорным положением ref1 в ответ на падение света P1 согласно первой конфигурации на препятствие.
Как видно на Фиг. 7, опорное положение ref1 представляет собой ориентир для определения нормального состояния, то есть, состояния, в котором перед роботом-пылесосом отсутствует препятствие и в котором пол, на котором находится робот-пылесос, является плоским. Опорное положение ref1 представляет собой положение, в котором отображается первая оптическая конфигурация P1, когда основной корпус 10 находится на плоском полу. Когда первая оптическая конфигурация P1 испускается к D2, блок 140 получения изображения находится в положении, в котором захватывается изображение первой оптической конфигурации P1.
Расстояние D1 от основного корпуса 10 может лежать в диапазоне 100-150 мм, и расстояние D2 от основного корпуса 10 может лежать в диапазоне 180-280 мм, но это не является ограничением. ʺD3ʺ обозначает расстояние от наиболее выступающей части передней поверхности основного корпуса до положения, в котором падает свет согласно второй конфигурации. Поскольку основной корпус воспринимает препятствия во время перемещения, расстояние D3 является минимальным расстоянием, в пределах которого основной корпус может воспринимать препятствие, находящееся спереди (выше) от основного корпуса, без столкновения с препятствием. D3 может быть задано в диапазоне приблизительно 23-30 мм.
С другой стороны, в то время как основной корпус 10 перемещается, получатель 220 информации о препятствии определяет присутствие обрыва рядом с роботом-пылесосом 1, когда первая оптическая конфигурация P1 пропадает с полученного изображения или когда на полученном изображении отображается только часть первой оптической конфигурации.
Когда первая оптическая конфигурация не отображается на полученном изображении, получатель 220 информации о препятствии может распознавать обрыв, который расположен спереди от робота-пылесоса 1. Когда спереди от робота-пылесоса 1 присутствует обрыв (например, лестница), свет P1 согласно первой конфигурации на падает на пол и, таким образом, пропадает с полученного изображения.
Получатель 220 информации о препятствии может определять, на основе расстояния D2, наличие обрыва на расстоянии D2 спереди от основного корпуса 10. Когда свет P1 согласно первой конфигурации имеет крестообразную конфигурацию, горизонтальная линия пропадает и отображается только вертикальная линия, посредством чего получатель 220 информации о препятствии может определять присутствие обрыва.
К тому же, когда положение первой оптической конфигурации не отображается, получатель 220 информации о препятствии может определять присутствие обрыва с левой стороны или с правой стороны от робота-пылесоса 1. Когда не отображается правая часть первой оптической конфигурации, получатель 220 информации о препятствии может определять присутствие обрыва с правой стороны.
Следовательно, на основе информации об обрыве, распознанной получателем 220 информации о препятствии, контроллер 230 перемещения может управлять узлом 300 привода перемещения с обеспечением перемещения робота-пылесоса 1 по пути, который не ведет к обрыву.
К тому же, когда спереди от робота-пылесоса 1 присутствует обрыв, контроллер 230 перемещения может управлять роботом-пылесосом с обеспечением перемещения вперед на заданное расстояние, например, на расстояние D2 или расстояние, меньшее, чем расстояние D2, для повторного определения присутствия обрыва с использованием датчика обрыва, установленного на нижней части основного корпуса. Робот-пылесос 1 может первично определять обрыв на основе полученного изображения и может вторично определять обрыв с использованием датчика обрыва после перемещения на заданное расстояние.
Устройство 210 извлечения конфигурации извлекает первую оптическую конфигурацию или вторую оптическую конфигурацию из полученного изображения, вводимого из блока 140 получения изображения, и передает извлеченную первую оптическую конфигурацию или вторую оптическую конфигурацию к получателю 220 информации о препятствии.
Получатель 220 информации о препятствии анализирует первую оптическую конфигурацию или вторую оптическую конфигурацию, извлеченную из полученного изображения, и сравнивает положение первой оптической конфигурации с заданным опорным положением ref1, посредством этого определяя наличие препятствия.
Как видно на Фиг. 14(a), когда горизонтальная линия первой оптической конфигурации P1 расположена у опорного положения ref1, определяется нахождение робота-пылесоса в нормальном состоянии. Здесь, нормальное состояние представляет собой состояние, в котором пол является ровным или плоским, и в котором робот-пылесос может продолжать перемещение, поскольку спереди от робота пылесоса отсутствует препятствие.
Когда препятствие присутствует на некоторой высоте спереди от робота-пылесоса, вторая оптическая конфигурация P2 падает на препятствие и отображается на полученном изображении. Таким образом, в нормальном состоянии, вторая оптическая конфигурация P2 как правило не отображена.
Как видно на Фиг. 14(b), когда горизонтальная линия первой оптической конфигурации P1 находится над опорным положением ref1, получатель 220 информации о препятствии определяет присутствие препятствия спереди от робота-пылесоса.
Когда получатель 220 информации о препятствии определяет препятствие, как видно на чертежах, контроллер 230 перемещения управляет узлом 300 привода перемещения с обеспечением обхождения основным телом препятствия. Получатель 220 информации о препятствии может определять положение и размер определенного препятствия на основе положений первой оптической конфигурации P1 и второй оптической конфигурации и на основе наличия отображения второй оптической конфигурации. К тому же, получатель 220 информации о препятствии может определять положение и размер препятствия на основе изменения в первой оптической конфигурации и второй оптической конфигурации, отображающихся на полученном изображении во время перемещения.
Контроллер 230 перемещения определяет, на основе информации о препятствии, введенной от получателя 220 информации о препятствии, продолжать ли перемещение или обойти препятствие, и управляет узлом 300 привода перемещения на основе определения. Например, когда высота препятствия ниже, чем заданная высота, или когда основной корпус может входить в пространство между препятствием и полом, контроллер 230 перемещения определяет, что основной корпус может продолжать перемещение.
Как видно на Фиг. 14(c), первая оптическая конфигурация P1 может быть отображена в более низком положении, чем опорное положение ref1. Когда первая оптическая конфигурация P1 отображается в более низком положении, чем опорное положение, получатель 220 информации о препятствии определяет наличие уклона вниз. Когда присутствует обрыв, первая оптическая конфигурация P1 пропадает, и, таким образом, уклон вниз может быть отличен от обрыва.
Как видно на Фиг. 14(d), когда первая оптическая конфигурация не отображена, получатель 220 информации о препятствии определяет, что в направлении перемещения присутствует обрыв.
К тому же, как видно на Фиг. 14(e), когда часть первой оптической конфигурации не отображена, получатель 220 информации о препятствии может определить, что обрыв присутствует с левой стороны или с правой стороны. В показанном примере, получатель 220 информации о препятствии определяет, что обрыв присутствует с левой стороны от основного корпуса 10.
Когда первая оптическая конфигурация P1 имеет крестообразную конфигурацию, наличие препятствия может быть определено на основе как положения горизонтальной линии, так и длины вертикальной линии.
Как видно на Фиг. 15, когда свет по конфигурации, испускаемый от датчика 100' препятствия, падает на препятствие, и, таким образом, на полученном изображении отображается соответствующая оптическая конфигурация, получатель 220 информации о препятствии может определять положение, размер и форму препятствия.
Как видно на Фиг. 15(a), когда стена присутствует спереди от основного корпуса, которое перемещается, свет согласно первой конфигурации падает на пол, и свет согласно второй конфигурации падает на стену. Таким образом, первая оптическая конфигурация P1 и вторая оптическая конфигурация P2 отображаются на полученном изображении как две горизонтальные линии. В это время, когда расстояние до стены больше, чем D2, первая оптическая конфигурация P1 отображается у опорного положения ref1, и вторая оптическая конфигурация отображается, посредством чего получатель 220 информации о препятствии может определять присутствие препятствия.
С другой стороны, когда расстояние от основного корпуса 10 до стены меньше, чем расстояние D2, свет согласно первой конфигурации падает на стену, а не на пол. Следовательно, на полученном изображении, первая оптическая конфигурация отображается над опорным положением ref1, и вторая оптическая конфигурация отображается над первой оптической конфигурацией. По мере того, как основной корпус приближается к препятствию, вторая оптическая конфигурация отображается в более низком положении. Таким образом, вторая оптическая конфигурация отображается в более низком положении, чем в ситуации, в которой расстояние между стеной и основным телом 10 больше, чем D2. В любой из этих ситуаций свет согласно второй конфигурации отображается над опорным положением и первой оптической конфигурацией.
В результате этого, получатель 220 информации о препятствии может вычислять расстояние до препятствия, то есть, стены, через первую оптическую конфигурацию и вторую оптическую конфигурацию.
Как видно на Фиг. 15(b), когда спереди от основного корпуса присутствует препятствие, такое как кровать или шкаф, свет P1 согласно первой конфигурации и свет P2 согласно второй конфигурации соответственно падают, как две горизонтальные линии, на пол и на препятствие.
Получатель 220 информации о препятствии определяет препятствие на основе первой оптической конфигурации и второй оптической конфигурации. Получатель 220 информации о препятствии может определять высоту препятствия на основе положения второй оптической конфигурации и изменения второй оптической конфигурации, которое происходит, когда основной корпус приближается к препятствию. Таким образом, контроллер 230 перемещения определяет возможность вхождения основного корпуса в пространство под препятствием, и управляет узлом 300 привода перемещения на основе определения.
Например, когда в очищаемой зоне присутствует препятствие, такое как кровать, с пространством, образованным между препятствием и полом, пространство может быть распознано, и, в частности, может быть определена высота пространства, посредством чего может быть определен выбор между прохождением через препятствие или обхождения его. Когда определено, что высота пространства меньше, чем высота основного корпуса 10, контроллер 230 перемещения может управлять узлом 300 привода перемещения с обеспечением обхождения основным телом 10 препятствия. Наоборот, когда определено, что высота пространства больше, чем высота основного корпуса 10, контроллер 230 перемещения может управлять узлом 300 привода перемещения с обеспечением вхождения основного корпуса 10 в пространство или прохождения через него.
В это время, несмотря на то, что на описанной выше Фиг. 15(a) первая оптическая конфигурация и вторая оптическая конфигурация отображаются как две горизонтальные линии, получатель 220 информации о препятствии может отличать друг от друга состояние на Фиг. 15(a) и состояние на Фиг. 15(b), поскольку расстояния между первой оптической конфигурацией и второй оптической конфигурацией являются разными. К тому же, на Фиг. 15(a), первая оптическая конфигурация отображается в более высоком положении, чем опорное положение, по мере того как расстояние до препятствия постепенно уменьшается. Тем не менее, как видно на Фиг. 15(b), когда препятствие находится выше, чем робот-пылесос, даже если робот-пылесос приближается к препятствию в пределах заданного расстояния, первая оптическая конфигурация P1 отображается в опорном положении ref1, и положение второй оптической конфигурации P2 изменяется. Следовательно, получатель 220 информации о препятствии может различать тип препятствия.
Как видно на Фиг. 15(c), когда робот-пылесос находится рядом с углом препятствия, такого как кровать или шкаф, свет P1 согласно первой конфигурации излучается как горизонтальная линия на полу, и свет P2 согласно второй конфигурации излучается на угол препятствия. Таким образом, часть света согласно второй конфигурации отображается как горизонтальная линия, и его остальная часть отображается как диагональная линия. Поскольку вторая оптическая конфигурация расположена в более высоком положении, по мере удаления препятствия от основного корпуса 10, часть второй оптической конфигурации отображается как изогнутая вверх диагональная линия при излучении на боковую поверхность препятствия, и остальная ее часть отображается как горизонтальная линия при излучении на переднюю поверхность препятствия.
Как видно на Фиг. 15(d), когда основной корпус 10 приближается к углу стены в пределах заданного расстояния, часть света P1 согласно первой конфигурации отображается как горизонтальная линия в более высоком положении, чем опорное положение, другая его часть, которая излучается на боковую поверхность угла, отображается как изогнутая вниз диагональная линия, остальная его часть, которая излучается на пол, отображается как горизонтальная линия в опорном положении.
Подобно ситуации, показанной на Фиг. 15(c), часть света согласно второй конфигурации отображается как горизонтальная линия, и остальная его часть, которая излучается на боковую поверхность угла, отображается как изогнутая вверх диагональная линия.
К тому же, как видно на Фиг. 15(e), в случае наличия препятствия, которое выступает из стены, первая оптическая конфигурация отображается как горизонтальная линия в опорном положении ref1. Часть второй оптической конфигурации P2, которая излучается на выступающую поверхность, отображается как горизонтальная линия, другая ее часть, которая излучается на боковую поверхность выступающей поверхности, отображается как изогнутая вверх диагональная линия, и остальная ее часть, которая излучается на стену, отображается как горизонтальная линия.
Соответственно, получатель 220 информации препятствии определяет положение, форму и размер (высоту) препятствия на основе положений и форм света согласно первой конфигурации и света согласно второй конфигурации.
Реферат
Изобретение относится роботу-пылесосу. Робот-пылесос содержит основной корпус, блок получения изображения, выполненный с возможностью захватывания изображения заданной области спереди от основного корпуса; блок испускания света согласно первой конфигурации, выполненный с возможностью испускания света вниз к заданной области; и блок испускания света согласно второй конфигурации, предусмотренный в положении под блоком испускания согласно первой конфигурации, выполненный с возможностью испускания света вверх к заданной области; левое и правое колеса; узел привода перемещения для приведения в движение колес; и всасывающий модуль. При этом путь, по которому испускается свет согласно первой конфигурации, и путь, по которому испускается свет согласно второй конфигурации, пересекаются друг с другом при виде со стороны основного корпуса. Пересечение (d1) пути, по которому испускается свет согласно первой конфигурации, и пути, по которому испускается свет согласно второй конфигурации, расположено ближе к основному корпусу, чем точка (d2) на полу, в которой блок получения изображения начинает захватывать изображение, а расстояние между точкой (d2) и точкой (d3), образованной светом первой конфигурации на горизонтальном полу, больше, чем расстояние между пересечением (d1) и точкой (d2). 2 н. и 14 з.п. ф-лы, 15 ил.
Формула
Документы, цитированные в отчёте о поиске
Робот-пылесос, система уборки помещения роботом и способ управления роботом
Комментарии