Биокинетический эллипсоид ахметова для разработки и укрепления позвоночного столба и всей опорно-двигательной системы в комплексе и его варианты - RU2706598C1
Код документа: RU2706598C1
Чертежи




Описание
Заявляемый биокинетический эллипсоид Ахметова для разработки и укрепления позвоночного столба и всей опорно-двигательной системы в комплексе относится к области средств обще-физической тренировки.
Наиболее близким к заявляемому изобретению является, принятый за прототип тренажер с движущимися по эллипсу ножными и вращающимися по кругу ручными опорами, патент на изобретение US 7874960 В2, содержащий:
- несущую платформу
- эллипсоид, состоящий из маховика установленного в задней части несущей платформы, двух шатунов присоедененных одним концом к маховику, второй конец установлен с возможностью горизонтального перемещения, на шатунах закреплены ножные опоры,
- изменяемую по длине телескопическую несущую конструкцию установленную на оси вращения маховика с возможностью изменения угла наклона и фиксации под необходимым углом к несущей платформе,
- вращающееся устройство с опорами для рук, установленое на свободном конце несущей конструкции.
На известном тренажере тренирующийся выполняет движения ногами по эллипсоидной траектории и движения руками по траектории круга.
Однако, при нормальной хотьбе ноги описывают траекторию близкую к эллипсоидной, а руки выполняют естественные для человека качающие, но не вращающие движения.
Задачей заявляемого изобретения является создание биокинетического тренажера для комплексной тренировки опорно-двигательной системы при горизонтальном положении позвоночника на котором ноги тренирующегося двигаются по эллиптической траектории, а руки выполняют качающиеся движения.
Технический результат в заявляемом изобретении, охарактеризованном в П1 формулы, содержащем:
- несущую конструкцию,
- эллипсоидный механизм
- платформы для ног,
- опоры для рук,
достигается за счет того, что:
- на несущей конструкции смонтирован эллипсоидный механизм,
- платформы для ног закреплены на основных шатунах эллипсоидного механизма обеспечивающего движение платформ для ног по эллиптической траектории,
эллипсоидный механизм включает в себя два маховика, оси вращения маховиков расположены на одной линии, маховики установлены с возможностью изменения и закрепления взаимного положения с разницей в 180 градусов,
- опоры для рук установлены на изменяемых по длине качающихся устройствах для рук смонтированных на передних несущих стойках и обеспечивающих качающиеся движения рук, опоры для рук свисают ниже оси качания, опоры для рук разнесениы от платформ для ног по горизонтали и находятся выше платформ для ног,
- передние несущие стойки установлены на несущей конструкции с возможностью отклонения вперед-назад и фиксации в нужном положении,
- эллипсоидный механизм и качающиеся устройства для рук соеденены кинематической трансмиссией обеспечивающей движение ножных платформ и опор для рук в противоположных направлениях,
кинематическая трансмиссия состоит из зубчатой передачи выполненной из двух шестеренок и качающегося рычага кинематической трансмиссии, верхняя шестерня зубчатой передачи закреплена на оси качания качающиегося устройства для рук, на оси нижней шестерни закреплен качающийся рычаг кинематической трансмиссии,
качающийся рычаг кинематической трансмиссии соединен с основным шатуном эллипсоидного механизма.
Во втором варианте компановки биокинетического эллипсоида
- изменяемые по длине качающиеся устройства для рук закреплены на несущей конструкции на одной передней несущей стойке.
В третьем варианте компановки биокинетического эллипсоида основные шатуны эллипсоидного механизма смонтированы с внутренних сторон маховиков. В четвертом варианте компановки биокинетического эллипсоида
- основные шатуны эллипсоидного механизма присоединены к маховикам посредством вспомогательных шатунов, которые одним концом закреплены к маховику, вторым концом шатуны опираются на установленные на несущей конструкции направляющие элементы и имеют возможность перемещения по направляющим элементам.
В пятом варианте компановки биокинетического эллипсоида
- вспомогательные шатуны, посредством которых основные шатуны эллипсоидного механизма присоединены к маховику, одним концом закреплены к маховику, другим концом закреплены к нижним концам задних качающихся рычагов установленных на несущей конструкции посредством задней несущей стойки.
В шестом варианте эллипсоидный механизм оснащен одним маховиком, на фигурах не показан.
Возможность изменения длины качающихся устройств для рук позволяет настроить качающие устройства для рук в соответствии с длиной рук тренирующегося.
Возможность изменения и закрепления взаимного положения маховиков вокруг оси вращения с разницей в 180 градусов, позволяет настраивать биокинетический эллипсоид на режим упражнений «шаги» или на режим упражнений «скачки».
Возможность отклонения передних несущих стоек, установленых на несущей конструкции, вперед-назад и фиксации в нужном положении позволяет настроить биокинетический эллипсоид под рост тренирующегося.
Зубчатая передача выполненная из двух шестеренок обеспечивает возможность движения ножных платформ и ручных качающихся устройств в противоположных направлениях что обеспечивает, в свою очередь, естественную координацию движений конечностей и всей опорно-двигательной системы.
Сущность изобретения кратко поясняется чертежами, на которых изображены:
На Фиг. 1 - общая схема биокинетического эллипсоида Ахметова в трех ракурсах, первый вариант компановки, вид сверху, вид сбоку, вид сзади,
где качающиеся устройства для рук (4) с опорами для рук (5) закреплены на несущей конструкции (1) на двух несущих стойках (3).
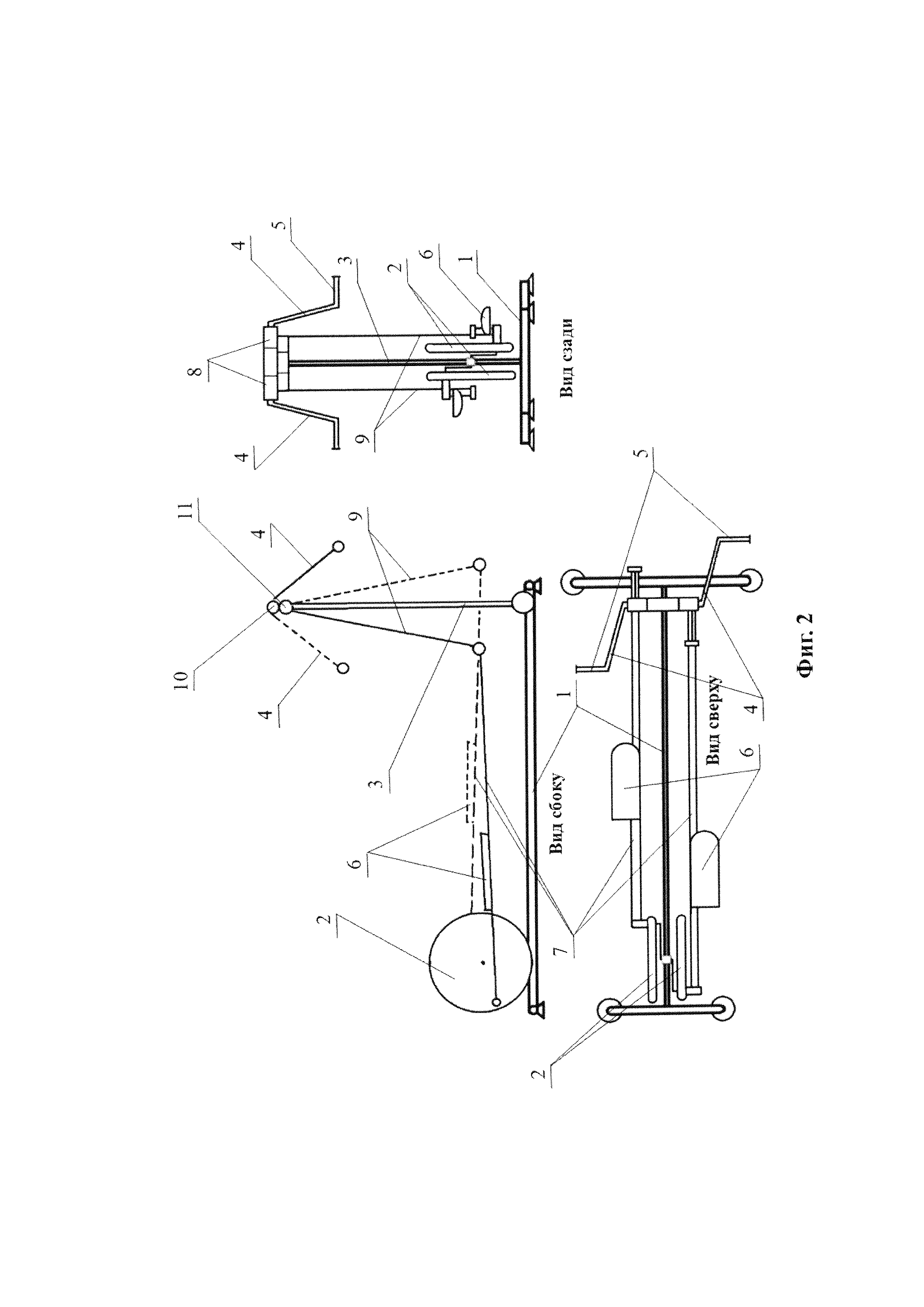
На Фиг. 2 общая схема биокинетического эллипсоида Ахметова в трех ракурсах, второй вариант компановки, где качающиеся устройства для рук (4), закреплены на несущей конструкции (1) на одной несущей стойке (3).
На Фиг. 3 - общая схема биокинетического эллипсоида Ахметова в двух ракурсах, второй вариант компановки, где схематично показан выделенный окружностями узел зубчатой передачи (8).
На Фиг. 4 - общая схема биокинетического эллипсоида Ахметова в трех ракурсах, третий вариант компановки, где основные шатуны эллипсоидного механизма (7) с платформами для ног (6) смонтированы с внутренних сторон маховиков.
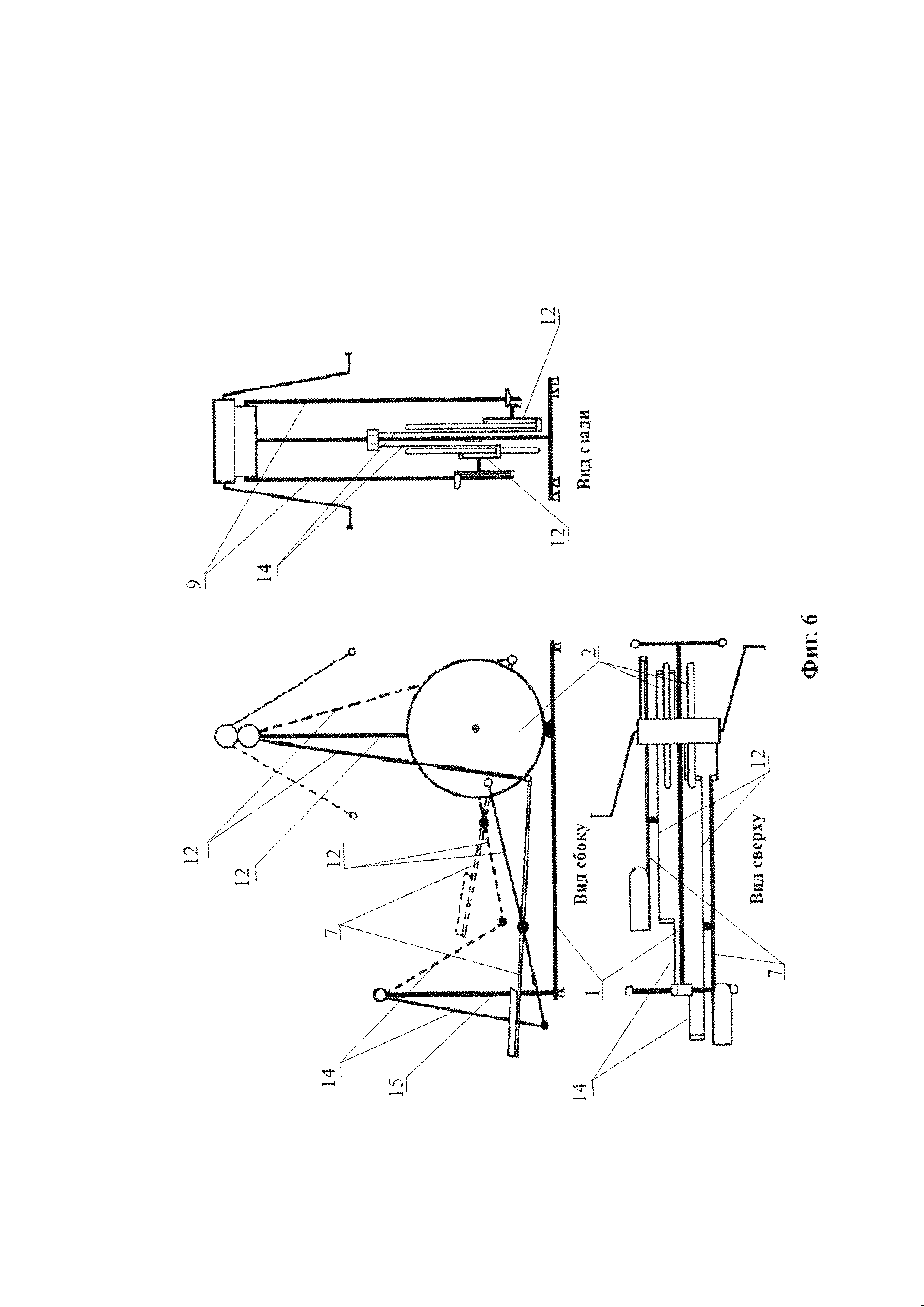
На Фиг. 5-6 общие схемы биокинетического эллипсоида Ахметова, где основные шатуны эллипсоидного механизма (7) присоединены к маховикам посредством вспомогательных шатунов (12).
Сущность изобретения подробнее на чертежах:
На Фиг. 1-3 Заявляемый биокинетический эллипсоид Ахметова для разработки и укрепления позвоночного столба и всей опорно-двигательной системы в комплексе состоит из:
- несущей конструкции (1),
- двух маховиков (2), установленных на несущей конструкции (1),
- двух несущих стоек (3)
- двух изменяемых по длине качающихся устройств для рук (4), установленных на несущих стойках (3), каждое качающееся устройство для рук (4) в нижней своей части имеет опору для рук (5),
- двух платформ для ног (6) закрепленных на основных шатунах эллипсоидного механизма (7),
- двух кинематических трансмиссий (смотрите дополнительно Фиг. 3), состоящих из зубчатой передачи (8) выполненной из двух шестеренок и качающегося рычага кинематической трансмиссии (9), верхняя шестерня зубчатой передачи (10) закреплена на оси качания качающиегося устройства для рук (4), на оси нижней шестерни (11) закреплен качающийся рычаг кинематической трансмиссии (9), который нижним концом присоеденен к основному шатуну эллипсоидного механизма (7).
На видах сбоку пунктиром обозначены находящиеся на тренажере слева: качающееся устройство для рук (4), качающийся рычаг кинематической трансмиссии (9), основной шатун эллипсоидного механизма (7) и платформа для ног (6).
На Фиг. 5 - основные шатуны эллипсоидного механизма (7) присоединены к маховикам посредством вспомогательных шатунов (12), которые одним концом закреплены к маховику, вторым концом шатуны опираются на установленные на несущей конструкции направляющие элементы (13).
На Фиг. 6 - вспомогательные шатуны (12), одним концом закреплены к маховику, другим концом к нижним концам задних качающихся рычагов (14) установленных на несущей конструкции посредством задней несущей стойки (15).
Заявляемый биокинетический эллипсоид Ахметова для разработки и укрепления позвоночного столба и всей опорно-двигательной системы в комплексе применяется следующим образом:
Передние несущие стойки, на которых закреплены качающиеся устройства для рук, устанавливаются в соответствии с ростом тренирующегося.
Изменяемые по длине качающиеся устройства для рук настраиваются в соответствии с длиной рук тренирующегося.
Тренирующийся, взявшись за ручные опоры, встает на ножные платформы, при этом позвоночник принимает свободное положение, близкое к горизонтальному. В таком положении позвоночника межпозвонковые диски освобождены от нагрузки весом тренирующегося.
При установке качающихся устройств для рук на двух передних несущих стойках тренирующийся занимает позицию между несущих стоек.
При установке качающихся устройств для рук на одной несущей стойке несущая стойка с опорами для рук в процессе тренировки находится между рук тренирующегося.
В процессе тренировки, выполняя движения ногами по эллиптической траектории и качающиеся движения руками, тренирующийся, удерживая равновесие на ручных и ножных опорах, динамично и эффективно разрабатывает все мышцы и суставы позвоночного столба и всей опорно-двигательной системы в комплексе,
при этом:
- автоматически равномерно распределяемая нагрузк на мышцы позвоночного столба выравнивает мышечный баланс и укрепляет мышечный корсет позвоночника и всю опорно-двигательную систему,
- кинематическая трансмиссия обеспечивающая движение ножных платформ и опор для рук в противоположных направлениях, способствует восстановлению естественной координации движений конечностей и всей опорно-двигательной системы.
Описанные выше варианты исполнения биокинетического эллипсоида Ахметова для разработки и укрепления позвоночного столба и всей опорно-двигательной системы в комплексе, показанные на Фиг. 1-6, следует рассматривать во всех аспектах только как иллюстративные, но не ограничивающие. Совершенно ясно, что другие варианты исполнения могут быть осуществлены без отступления от сущности и объема настоящего изобретения.
Реферат
Биокинетический эллипсоид Ахметова сочетает в себе динамические свойства и преимущества биокинетического тренажера для спины с качающимися опорами для конечностей со свойствами известных эллиптических тренажеров. Имеет в своей конструкции два кинематически связанных механизма: механизм, обеспечивающий движение платформ для ног по эллиптической траектории, и механизм, обеспечивающий качающиеся движения опор для рук. Кинематическая связь обеспечивает движение ножных опор и опор для рук в противоположных направлениях, что обеспечивает для тренирующегося сочетание двух видов движений конечностями - круговые движения для ног и качающиеся движения для рук и принудительную координацию движений конечностей и всей опорно-двигательной системы. 6 ил.
Комментарии