Физиотерапевтическая лестница и система наклона - RU2755582C1
Код документа: RU2755582C1
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройствам для физиотерапии и, в частности, оно касается физиотерапевтической системы, объединяющей ступеньки и наклонную плоскость, при этом проводимая в ней процедура предпочтительно отслеживается и документально регистрируется с помощью компьютерной системы, связанной с интегрированным набором датчиков.
Многие пациенты нуждаются в физиологической реабилитации по разным причинам. В их числе, например, жертвы дорожно-транспортных происшествий, пациенты, пострадавшие от сердечного приступа или перенесшие операцию на сердце, а также люди, испытавшие церебральный криз, перенесшие инвазивные медицинские процедуры или получившие увечье в результате насильственных действий, и т.п. Этим пациентам требуется проведение физиотерапевтических процедур в реабилитационных отделениях различных учреждений или с помощью профессиональных врачей-физиотерапевтов, чтобы постепенно вернуться к нормальной жизни.
Тренировка ходьбой, поднимаясь и спускаясь по ступенькам, является основой процесса реабилитации. Способность подниматься и спускаться по ступенькам - важнейший компонент при принятии решения медицинским персоналом о том, можно ли выписывать пациента из реабилитационного учреждения домой.
Пример пригодного устройства для тренировки подъема и спуска по ступенькам описан в патенте США №5,901,813, причем оно коммерчески доступно от компании DPE Medical Ltd. (Израиль) под названием «Динамический лестничный тренажер» (Dynamic Stair Trainer (DST)). Устройство состоит из множества ступенек, высота которых может одновременно изменяться в соответствии с возможностями пациента, проходящего тренировку.
Лестничные тренажеры, используемые в физиотерапии для подъема и спуска по ступенькам, предпочтительно являются статическими в процессе их применения и имеют одинаковый шаг, придавая внешний вид и создавая ощущение традиционных ступенек. Предпочтительно также, чтобы регулировка высоты происходила лишь путем вертикального перемещения без изменения глубины опорной поверхности каждой ступеньки и имелись закрытые подступеночные поверхности без перехлеста ступеней, чтобы минимизировать риск спотыкания.
Дальнейшие разработки компании DPE Medical Ltd. (Израиль) описаны в патенте США №9,381,397, включенном в настоящее описание путем ссылки в его полном объеме.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет собой физиотерапевтическую систему, объединяющую ступеньки и наклонную плоскость.
Согласно раскрытию варианта осуществления настоящего изобретения, предложена система для выполнения на нижележащей поверхности, при этом система содержит (а) набор из по меньшей мере трех горизонтальных опорных поверхностей, включающий в себя первую опорную поверхность и последнюю опорную поверхность; (b) приводную систему, механически связанную с набором опорных поверхностей и выполненную с возможностью вертикального перемещения по меньшей мере двух опорных поверхностей, так чтобы регулировать высоту подъема между смежными опорными поверхностями, таким образом, чтобы образовывать набор ступенек с одинаковым шагом для некоторого диапазона различных высот подъема; а также (с) пандус, имеющий первый конец, шарнирно соединенный с последней опорной поверхностью, так чтобы образовывать пешеходную поверхность от первого конца ко второму концу пандуса, причем пешеходная поверхность имеет переменный угол наклона, изменяющийся в зависимости от вертикального положения последней опорной поверхности, при этом приводная система выполнена с возможностью перемещения опорных поверхностей в полностью опущенное состояние, в котором опорные поверхности набора расположены бок о бок в виде непрерывной плоской поверхности, а также дополнительно содержащий опорную конструкцию, выполненную с возможностью поддержки второго конца пандуса в некотором диапазоне перемещений, так что в полностью опущенном состоянии второй конец пандуса поддерживается над нижележащей поверхностью, при этом пешеходная поверхность является горизонтальной, причем множество опорных поверхностей и пешеходная поверхность совместно образуют непрерывную горизонтальную пешеходную дорожку.
Согласно дополнительному варианту осуществления настоящего изобретения приводная система содержит линейный исполнительный механизм, выполненный с возможностью вертикального подъема последней опорной поверхности, при этом линейный исполнительный механизм выполнен за пределами области пешеходной дорожки.
Согласно дополнительному варианту осуществления настоящего изобретения непрерывная горизонтальная пешеходная дорожка расположена на первой высоте над нижележащей поверхностью, при этом система дополнительно содержит соединительный пандус, верхний край которого шарнирно соединен со вторым концом пандуса, при этом соединительный пандус заканчивается на нижнем крае, смежном с нижележащей поверхностью.
Согласно дополнительному варианту осуществления настоящего изобретения приводная система выполнена с возможностью перемещения опорных поверхностей, так чтобы образовывать набор ступенек с множеством высот подъема, по существу охватывающих большую часть диапазона от 0 см до 18 см.
Согласно дополнительному варианту осуществления настоящего изобретения приводная система выполнена с возможностью перемещения опорных поверхностей исключительно в вертикальном направлении, при этом каждая из множества опорных поверхностей имеет соответствующую вертикальную подступеночную поверхность.
Согласно дополнительному или альтернативному варианту осуществления настоящего изобретения также обеспечены: (а) набор датчиков, содержащий: (i) первый датчик, выполненный с возможностью обнаруживать присутствие пациента на первой опорной поверхности, (ii) второй датчик, выполненный с возможностью обнаруживать присутствие субъекта на последней опорной поверхности, и (iii) третий датчик, выполненный с возможностью обнаруживать присутствие субъекта на пандусе в области, смежной со вторым концом; а также (b) компьютерная система, содержащая по меньшей мере один процессор и энергонезависимый носитель информации, при этом компьютерная система имеет связь с набором датчиков, при этом компьютер выполнен с возможностью генерирования записи данных о физической активности пациента, при этом физическая активность пациента определяется по меньшей мере частично из последовательности выходных сигналов первого, второго и третьего датчиков.
Согласно дополнительному варианту осуществления настоящего изобретения набор датчиков также содержит датчик высоты подъема, выполненный с возможностью генерирования выходного сигнала, указывающего текущую высоту подъема набора ступенек и текущий наклон пандуса, при этом компьютер выполнен с возможностью осуществления по меньшей мере двух из следующих операций: (а) обнаружение пациента первым датчиком, а затем вторым датчиком на ненулевой высоте подъема, для определения времени от обнаружения первым датчиком до обнаружения вторым датчиком в качестве времени, затраченного на подъем по ступенькам при текущей обнаруженной высоте подъема; (b) обнаружение пациента третьим датчиком, а затем вторым датчиком на ненулевой высоте подъема, для определения времени от обнаружения третьим датчиком до обнаружения вторым датчиком в качестве времени, затраченного на подъем по склону при наклоне, соответствующем текущей обнаруженной высоте подъема; а также (с) обнаружение нулевой высоты подъема для определения времени от обнаружения пациента первым датчиком до обнаружения пациента третьим датчиком, или наоборот, в качестве времени, затраченного на прохождение заданного горизонтального расстояния.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение описано в настоящем документе лишь в качестве примера со ссылкой на сопроводительные чертежи, где:
ФИГ. 1 - изометрический вид терапевтической системы, построенной и работающей согласно одному из вариантов осуществления настоящего изобретения, в которой предусмотрены ступеньки переменной высоты и пандус, имеющий переменный угол наклона, причем система показана в полностью поднятом состоянии;
ФИГ. 2 - изометрический вид терапевтической системы по ФИГ. 1, причем система показана в полностью опущенном состоянии;
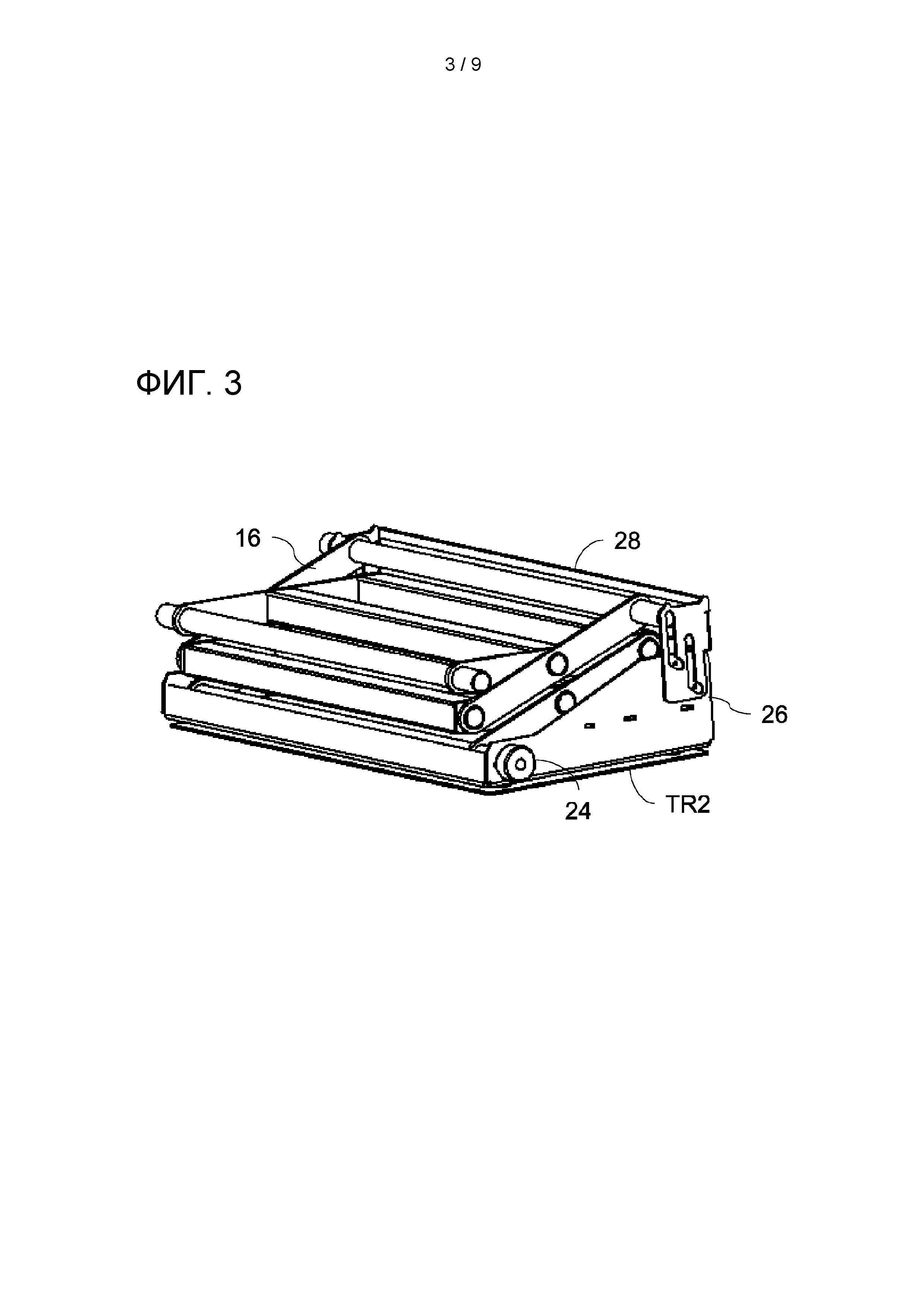
ФИГ. 3 - изометрический вид одной из ступенек системы по ФИГ. 1 в перевернутом виде, показывающий внутренний механизм;
ФИГ. 4 - вид, аналогичный виду по ФИГ. 1, но показанный со стороны пандуса системы;
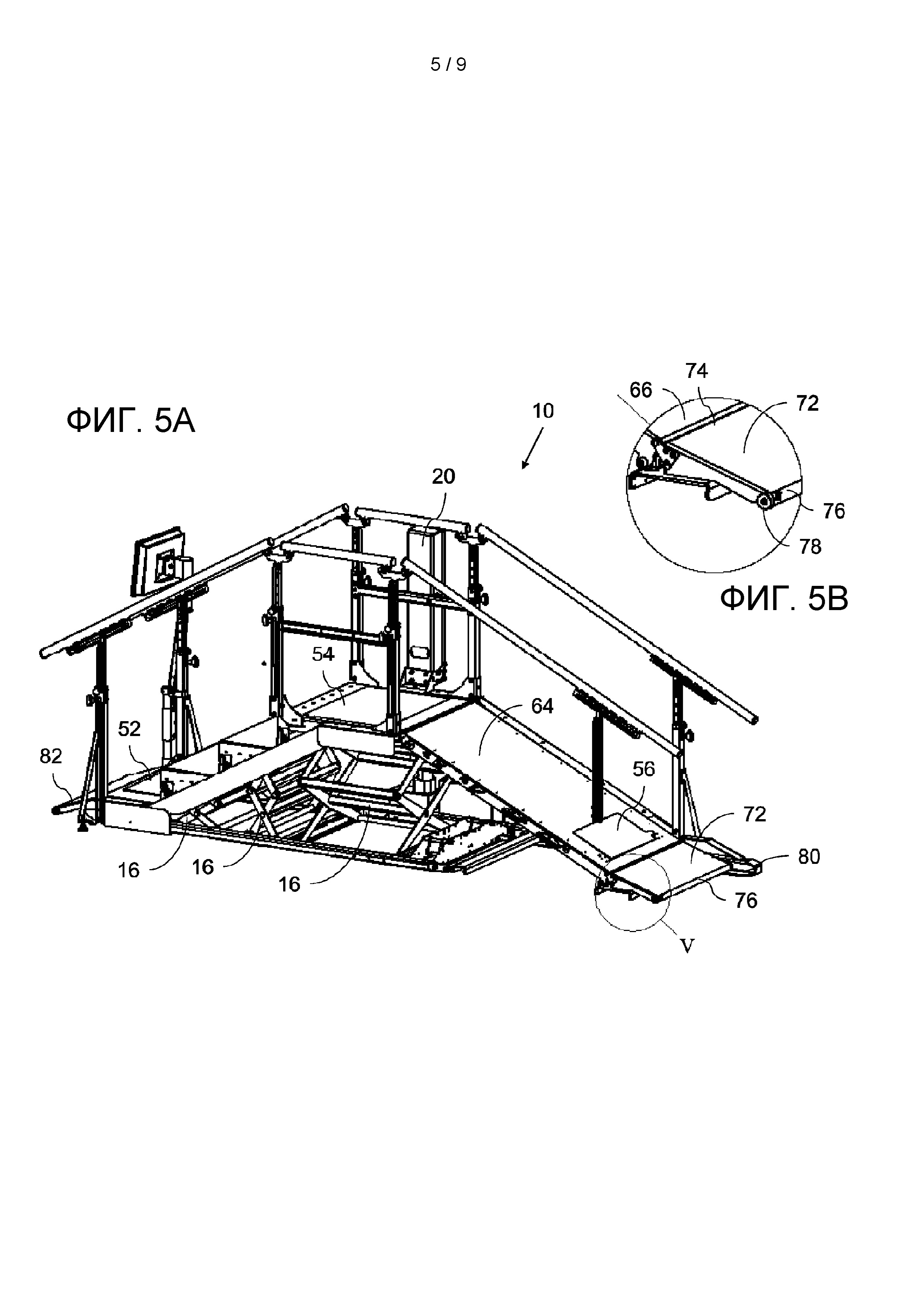
ФИГ. 5А и 6А - виды, аналогичные виду по ФИГ. 4, где некоторые элементы удалены, чтобы показать внутренние компоненты системы;
ФИГ. 5В и 6В - увеличенные виды областей на ФИГ. 5А и 6А, помеченных соответственно символами V и VI;
ФИГ. 7 - блок-схема системы по ФИГ. 1;
ФИГ. 8 - схематичное представление разных режимов использования системы по ФИГ. 1;
ФИГ. 9 - схематичное представление графического интерфейса пользователя, представляющего данные, зарегистрированные системой по ФИГ. 1 в ходе проведения процедуры для конкретного пациента.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет собой физиотерапевтическую систему, объединяющую ступеньки и наклонную плоскость, а также соответствующие способы отслеживания и/или документирования терапии, проводимой с помощью этого устройства.
Принципы создания и работы терапевтических систем согласно настоящему изобретению можно лучше понять, обратившись к чертежам и сопроводительному описанию.
На Фигурах 1-7 показаны различные полные или частичные виды физиотерапевтической лестничной тренажерной системы, обозначенной в целом позицией 10, которая построена и работает согласно особенно предпочтительному варианту осуществления настоящего изобретения.
В основе конструкции системы 10 согласно данному особенно предпочтительному примеру лежат лестничная конструкция и подъемный механизм, в общем, схожие с описанными в патенте США №9,381,397, принадлежащем компании DPE Medical Ltd. (Израиль). Таким образом, устройство имеет набор 12 из по меньшей мере трех, а в представленном примере из четырех горизонтальных опорных поверхностей, по отдельности именуемых TR0, TR1, TR2 и TR3. Приводная система 14 механически связана с набором 12 опорных поверхностей и выполнена с возможностью перемещения по меньшей мере двух опорных поверхностей TR1-TR3 вертикально, чтобы регулировать высоту подъема между смежными опорными поверхностями, так чтобы образовывать набор ступенек 12 с одинаковым шагом для некоторого диапазона различных высот подъема.
Предпочтительный, но неограничивающий вариант реализации приводной системы 14 наилучшим образом показан на ФИГ. 5А. Под каждой опорной поверхностью имеется механизм 16, работающий по типу ножниц, обеспечивающий возможность вертикального перемещения опорной поверхности, при этом обеспечивая ее параллельность полу. Линейный привод, показанный здесь в виде винтового исполнительного механизма 18, выполнен в стойке 20 возле верхней опорной поверхности TR3 и выполнен с возможностью вертикального перемещения опорной поверхности TR3. Другие типы исполнительных механизмов, такие как гидравлические или пневматические исполнительные механизмы, также могут применяться. Две боковые балки 22 шарнирно связаны с верхней опорной поверхностью TR3, так чтобы подниматься на одном конце, когда поднимается верхняя опорная поверхность. Все другие опорные поверхности имеют боковые выступы 24 (ФИГ. 3), которые входят в зацепление с балками 22 в виде направляющих, тем самым поднимая каждую опорную поверхность пропорционально подъему верхней поверхности и сохраняя одинаковый шаг набора ступенек 12. На ФИГ. 1 и 4 механизмы, работающие по типу ножниц, скрыты складным защитным кожухом 17 для предотвращения попадания в механизм предметов и людей, а на ФИГ. 5А и 6А защитный кожух снят, чтобы показать детали конструкции.
При проведении терапии с помощью лестницы важно, чтобы ступеньки представляли собой закрытые ступеньки, т.е. имели закрытые подступеночные поверхности, чтобы носки ног пациента не застревали под ступенькой. Для этого каждая опорная поверхность (кроме TR0), в общем, выполнена за одно целое с подступеночной поверхностью 26, чтобы образовать ступенчатую конструкцию. Приводная система 14 предпочтительно выполнена с возможностью перемещения опорных поверхностей исключительно в вертикальном направлении, например посредством вышеупомянутых механизмов 16, работающих по типу ножниц.
В особенно предпочтительном случае, проиллюстрированном на ФИГ. 3, каждая ступенька также включает в себя телескопически удлиненный участок 28, создающий продолжение подступеночной поверхности 26 в высоко поднятых положениях системы, например, как можно видеть на ФИГ. 1. Использование телескопически удлиненного участка позволяет системе принимать полностью опущенное состояние (ФИГ. 2), в котором расстояние от пола меньше максимальной высоты подъема набора ступенек 12 в полностью поднятом состоянии. Например, определенные особенно предпочтительные варианты реализации настоящего изобретения предусматривают регулируемый подъем ступенек на величину более 16 сантиметров, предпочтительно по меньшей мере до 18 сантиметров, в то время как опорные поверхности в полностью опущенном состоянии предпочтительно располагаются на высоте менее 15 сантиметров над нижележащей поверхностью, наиболее предпочтительно не более примерно 12 сантиметров над нижележащей поверхностью.
Система предпочтительно также включает в себя по меньшей мере одни поручни, продолжающиеся вдоль набора ступенек 12. В варианте реализации, проиллюстрированном в настоящем описании, поручни 30 созданы на каждой стороне набора ступенек 12 и дополнены участками 32 поручней, проходящими вдоль верхней опорной поверхности, которая в данном случае выполнена с возможностью образования верхней платформы, чтобы способствовать развороту между подъемом и спуском, когда это требуется. Поручни дополнительно или в качестве альтернативы могут регулироваться в горизонтальном положении, чтобы обеспечить возможность регулировки расстояния между правым и левым поручнями.
Приводная система 14 предпочтительно выполнена с возможностью перемещения опорных поверхностей, чтобы образовывать набор ступенек 12 с множеством высот подъема, по существу охватывающих большую часть диапазона от 0 см до 18 см. Словосочетание "по существу охватывающих" в данном случае относится к возможности регулировки, предусматривающей либо непрерывную регулировку, либо множество дискретных положений, разнесенных не более чем на 2 см, обычно с шагом 1 см или менее. В особенно предпочтительном варианте реализации система обеспечивает регулировку, чтобы по существу охватывать весь диапазон, составляющий по меньшей мере 0-18 см, тем самым способствуя проведению упражнений с использованием всех обычных размеров ступенек.
Система предпочтительно принимает полностью плоское состояние (нулевой ступеньки), как показано на ФИГ. 2. В этом положении множество опорных поверхностей располагаются бок о бок друг с другом, образуя непрерывную плоскую поверхность.
Настоящее изобретение делает доступной дополнительную форму физических упражнений с использованием регулируемого пандуса 60 (также именуемого в настоящем описании "склоном" или "наклонной плоскостью") для оценки и тренировки способности пациента подниматься и/или спускаться по склону. Пандус 60 имеет первый конец 62, шарнирно соединенный с последней опорной поверхностью TR3, чтобы образовать пешеходную поверхность 64 от первого конца 62 ко второму концу 66 пандуса. Пешеходная поверхность 64 имеет переменный угол наклона, изменяющийся в зависимости от вертикального положения последней опорной поверхности TR3.
Отличительной особенностью указанных предпочтительных вариантов осуществления настоящего изобретения заключается в том, что создана опорная конструкция, выполненная с возможностью поддержки второго конца 66 пандуса 60 в некотором диапазоне перемещений, так что в полностью опущенном состоянии, представленном на ФИГ. 2, второй конец 66 пандуса 60 поддерживается над нижележащей поверхностью, при этом его пешеходная поверхность 64 расположена горизонтально, так что множество опорных поверхностей TR0, TR1, TR2, TR3 и пешеходная поверхность 64 совместно образуют непрерывную горизонтальную пешеходную дорожку. Как описано выше, различные компоненты, такие как механизмы 16, работающие по типу ножниц, и подступеночные поверхности 26, определяют минимальную высоту над нижележащей поверхностью, на которой может быть обеспечена плоская поверхность с "нулевым" подъемом ступенек. Если бы второй конец 66 пандуса 60 продолжался до уровня пола, это привело бы к существованию небольшого остаточного наклона. Опорная конструкция по данному аспекту настоящего изобретения направлена на решение этой проблемы путем обеспечения того, что в состоянии нулевого подъема пешеходная поверхность 64 ориентирована параллельно нижележащей поверхности, тем самым способствуя удлинению горизонтальной пешеходной дорожки по длине устройства 10 предпочтительно по меньшей мере до 2,5 метров, обычно по меньшей мере до около 3 метров.
Опорная конструкция может принимать самые разные формы и может задавать различные геометрические места точек при перемещении второго конца 66 с изменением угла наклона пандуса. В особенно простом и эффективном варианте реализации, как лучше всего можно видеть на ФИГ. 6А и 6В, устройство 10 имеет пару направляющих 68, которые в случае, проиллюстрированном в настоящем описании, представляют собой элементы рамы устройства, продолжающиеся по всей длине устройства, вдоль которых второй конец 66 скользит, опираясь на подшипники 70 скольжения. Подшипники скольжения могут оказаться предпочтительнее подшипников качения благодаря относительно большой площади контакта, а значит и лучшему распределению нагрузки, хотя подшипники качения также могут использоваться.
Чтобы помочь пациентам зайти на пандус 60, соединительный пандус 72 предпочтительно снабжен верхним краем 74, шарнирно соединенным со вторым концом 66 пандуса 60, как лучше всего можно видеть на ФИГ. 5В. Соединительный пандус 72 заканчивается на нижнем крае 76, смежном с нижележащей поверхностью. Термин "смежный" в данном случае указывает, что нижний край 76 достаточно близок к нижележащей поверхности, чтобы ступня пациента не могла под ним застрять. Предпочтительно нижний край 76 также является достаточно тонким, чтобы не представлять собой значительной ступеньки для восхождения на передний край. Передний край, таким образом, предпочтительно имеет толщину не более примерно 3 сантиметров, более предпочтительно не более примерно 2 сантиметров. Чтобы свести к минимуму трение, когда нижний край совершает движение вдоль нижележащей поверхности в процессе вертикального перемещения первого конца 62 пандуса 60 и соответствующего горизонтального перемещения второго конца 66, нижний край 76 соединительного пандуса 72 предпочтительно также установлен на подшипники, показанные здесь в виде подшипников 78 качения, которые могут совершать качение непосредственно по нижележащей поверхности или, что более предпочтительно, по тонкой кромке 80, выступающей внутрь от направляющих 68.
Второй соединительный пандус 82 обычно предусмотрен на конце устройства противоположно соединительному пандусу 72, чтобы помочь пациентам взойти на первую ступеньку TR0. Ступенька TR0 и соединительный пандус 82 обычно являются жестко закрепленными неподвижными компонентами.
Чтобы минимизировать высоту устройства над нижележащей поверхностью в полностью опущенном состоянии, линейный исполнительный механизм 18, приспособленный для поднятия устройства вертикально, предпочтительно размещен за пределами области пешеходной дорожки, как показано на чертежах, причем, как правило, смежно со стороной верхней платформы, соответствующей TR3.
Датчик высотной отметки или "датчик высоты подъема" 50 (ФИГ. 7, обычно реализуемый в виде датчика линейных перемещений, непосредственно измеряющего высоту платформы, или датчика угловых и линейных перемещений, отслеживающего перемещение исполнительного механизма) указывает положение платформы, а значит и подъем ступенек, в любой момент времени.
В вышеописанной конструкции регулировка высоты центральной платформы приводит к одновременной регулировке единой высоты ступенек и угла наклона поверхности склона, делая доступным два отдельных режима терапевтических действий. Выходной сигнал датчика высотной отметки также указывает текущий угол наклона поверхности склона.
В дополнение к вышеупомянутым компонентам, как показано в неограничивающем примере, представленном на ФИГ. 7, в настоящем изобретении присутствует компьютерная система 34, содержащая по меньшей мере один процессор 36 и энергонезависимый носитель 38 информации обычно вместе с сетевыми компонентами 40 для соединения с проводной или беспроводной сетью. Компьютерная система 34 может представлять собой компьютер любого подходящего типа, в частности, компьютер общего назначения, осуществляющий прогон соответствующих программ под управлением соответствующей операционной системы, и специализированную компьютерную систему, имеющую соответствующее аппаратное обеспечение, программное обеспечение и/или аппаратно-программное обеспечение для выполнения различных требуемых функций. В некоторых вариантах осуществления компьютерная система 34 может быть реализована с помощью мобильного электронного устройства, такого как смартфон, использующего соответствующее программное обеспечение и осуществляющего беспроводной обмен информацией с различными другими компонентами системы.
Компьютерная система 34 предпочтительно связана и возможно интегрирована с одним или более устройствами 42 для ввода данных пользователем и дисплеем 44. В одном предпочтительном случае вся компьютерная система 34 интегрирована в "планшет", имеющий сенсорный экран, который служит одновременно устройством ввода данных и дисплеем, как схематично показано на ФИГ. 1.
Управление перемещением вверх/вниз, осуществляемым приводной системой 14, может достигаться путем нажатия непосредственно на кнопки «вверх/вниз» на контроллере 46, связанном с приводной системой 14. Дополнительно или в качестве альтернативы управление приводной системой 14 может осуществляться посредством пользовательского интерфейса компьютерной системы 34.
Компьютерная система 34 предпочтительно связана с набором 48 датчиков, содержащим по меньшей мере один датчик, приспособленный для измерения параметра, связанного с физиотерапией, проводимой с помощью устройство 10. Предпочтительные примеры датчиков и соответствующие режимы работы системы описаны ниже.
Согласно определенным особенно предпочтительным вариантам реализации настоящего изобретения устройство снабжено по меньшей мере тремя датчиками для обнаружения присутствия пациента в конкретных местах на устройстве. Эти датчики предпочтительно включают в себя первый датчик 52, приспособленный для обнаружения присутствия пациента на первой (самой нижней) ступеньке TR0; второй датчик 54, приспособленный для обнаружения присутствия пациента на центральной платформе TR3; и третий датчик 56, приспособленный для обнаружения присутствия пациента рядом с нижним концом пандуса 60. Датчики предпочтительно могут быть реализованы в виде датчиков давления, встроенных в поверхности, на которые наступает пользователь, хотя могут использоваться любые другие датчики подходящего типа, в частности оптические датчики, датчики близости, схемы распознавания на основе радиочастотной идентификации (RFID), а также детектирование на основе обработки изображений.
Размещение первого, второго и третьего датчиков 52, 54 и 56 согласно настоящему описанию обеспечивает выполнение важных функций, поскольку система может автоматически идентифицировать и регистрировать виды действий, выполняемых в ходе проведения процедуры. Это показано на ФИГ. 8. В частности, порядок, в котором датчики детектируют присутствие пациента, указывает, какая выполняется комбинация подъема или спуска по ступенькам или по склону, следующим образом:

В дополнение к идентификации вида выполняемых действий время от покидания одного датчика до достижения другого позволяет оценить время, затраченное в этом случае на выполнение идентифицированных действий. Данная информация предпочтительно хранится вместе с информацией о подъеме ступенек или градиенте/угле наклона в виде части персональных данных пациента в отношении проводимой процедуры и полученных результатов (с использованием хранения данных и извлечения информации, обеспечиваемых компьютерной системой 34 непосредственно и/или посредством удаленного запоминающего устройства, к которому имеется доступ через сетевые компоненты 40), а затем может использоваться для создания графического отображения и/или напечатанной таблицы либо диаграммы прогресса пациента по результатам курса проведения процедуры, тем самым способствуя отслеживанию прогресса при проведении процедуры. В качестве одного неограничивающего иллюстративного примера отображение на экране, демонстрирующее прогресс пациента, показано на ФИГ. 9.
Кроме того, стоит отметить, что на ФИГ. 9 количество зарегистрированных "подъемов" и количество зарегистрированных "спусков" в каждом курсе проведения процедур не обязательно равны друг другу. Это происходит в том случае, когда медицинский работник определяет, что пациент должен сосредоточиться на том или ином действии, и в этом случае высота устройства может быть снижена или сведена к нулю между подъемом и спуском, при этом второстепенные действия могут не регистрироваться. Кроме того, даже если имеются данные обо всех действиях по подъему/спуску по ступенькам/склону, может оказаться предпочтительным избирательно отображать только часть этих данных в графической форме в каждый конкретный момент времени, чтобы не загромождать дисплей. Наиболее предпочтительно, чтобы графический интерфейс пользователя позволял медицинскому работнику выбирать данные для отображения, например, отображая график прогресса для подъема по ступенькам и склону без отображения информации о спусках или отображая информацию только о подъемах и спусках по ступенькам. Любые другие комбинации также могут использоваться.
В аналитические данные также включена запись времени ходьбы по горизонтальной поверхности между датчиками 1 и 3 (в любом направлении), которая регистрирует время, затраченное пациентом на прохождение заданного расстояния по плоской поверхности, составляющего в данном случае около 3 метров. Способность ходить пешком - дополнительный важный индикатор готовности пациента вернуться к независимому функционированию за пределами лечебного учреждения, при этом многие учреждения, предназначенные для проведения терапевтических процедур, испытывают недостаток в устройствах для точного измерения и регистрации способности пациента ходить по горизонтальной поверхности. Комплексное устройство со ступеньками и наклонной плоскостью по настоящему изобретению, таким образом, вносит существенный вклад, создавая инструмент для дополнительного мониторинга и регистрации способности пациентов ходить по горизонтальной поверхности.
Устройство предпочтительно включает в себя поручни по обеим сторонам устройства, которые подразделяются на поручни 32 центральной платформы, поручни 30 для ступенек и поручни 84 для пандуса 60. Поручни предпочтительно также продолжаются до соединительных рамп 72 и 82 или за них. Поручни для ступенек и пандуса предпочтительно шарнирно соединены с опорами, предназначенными для поручней центральной платформы, и установлены посредством зацепления штыря с пазом или по какой-либо иной схеме линейной опоры на стойках вблизи концов устройства 10, чтобы обеспечить возможность изменения длины поручней между опорами при регулировке высоты подъема. Поручни предпочтительно поддерживаются регулируемыми опорами, чтобы предусмотреть возможность регулировки для пациентов разного роста, например, взрослых и детей. Может быть также предусмотрен механизм (не показан), чтобы позволить регулировать положение поручней по горизонтали и тем самым регулировать расстояние между поручнями.
Система предпочтительно включает в себя дополнительные компоненты или взаимодействует с дополнительными компонентами, в том числе, но не ограничиваясь перечисленным, компонентами системы управления, компонентами пользовательского интерфейса, сетевыми компонентами и удаленными компьютерными системами, и/или дополнительными датчиками, чтобы обеспечить выполнение дополнительных функций. В качестве неограничивающих примеров различные датчики для распознавания распределения веса, частоты сердечных сокращений и т.д., описанные в вышеупомянутом патенте США №9,381,397, могут быть все с успехом реализованы применительно к настоящему изобретению.
Следует отметить, что вышеприведенное описание служит лишь в качестве примера и что возможны многие другие варианты осуществления в объеме настоящего изобретения, определяемом прилагаемой формулой изобретения.
Реферат
Группа изобретений относится к медицинской технике, а именно к физиотерапевтической лестничной тренажерной системе для размещения на нижележащей поверхности. Физиотерапевтическая лестничная тренажерная система (10) содержит набор из трех горизонтальных опорных поверхностей, приводную систему, пандус, опорную конструкцию. Набор горизонтальных опорных поверхностей (12) включает в себя первую и последнюю опорную поверхность. Приводная система (14) механически связана с набором опорных поверхностей и выполнена с возможностью вертикального перемещения двух опорных поверхностей, так чтобы регулировать высоту подъема между смежными опорными поверхностями. При этом образуется набор ступенек с одинаковым шагом для диапазона высот подъема. Пандус (60) имеет первый и второй конец. Первый конец шарнирно соединен с последней опорной поверхностью. При этом образуется пешеходная поверхность от первого конца ко второму концу пандуса. Пешеходная поверхность имеет переменный угол наклона, изменяющийся в зависимости от вертикального положения последней опорной поверхности. Приводная система выполнена с возможностью перемещения опорных поверхностей в полностью опущенное состояние. В этом состоянии опорные поверхности расположены бок о бок в виде непрерывной плоской поверхности. Опорная конструкция выполнена с возможностью поддержки второго конца пандуса в диапазоне перемещения. В полностью опущенном состоянии второй конец пандуса поддерживается над нижележащей поверхностью с расположением пешеходной поверхности горизонтально. При этом набор опорных поверхностей и пешеходная поверхность совместно образуют непрерывную горизонтальную пешеходную дорожку. В другом варианте физиотерапевтическая лестничная тренажерная система содержит также набор датчиков, компьютерную систему. Набор датчиков содержит первый, второй и третий датчики. Первый датчик (52) выполнен с возможностью обнаруживать присутствие пациента на первой опорной поверхности (TR0). Второй датчик (54) выполнен с возможностью обнаруживать присутствие субъекта на последней опорной поверхности (TR3). Третий датчик выполнен с возможностью обнаруживать присутствие субъекта на пандусе в области, смежной с вторым концом. Компьютерная система (34) содержит процессор и энергонезависимый носитель информации. При этом компьютерная система имеет связь с набором датчиков. Компьютер выполнен с возможностью генерирования записи данных о физической активности пациента. Физическая активность пациента определяется из последовательности выходных сигналов первого, второго и третьего датчиков. Обеспечивается физиотерапевтическая система, объединяющая ступеньки и наклонную плоскость, с возможностью отслеживания и документирования терапии, проводимой с помощью устройства. 2 н. и 7 з.п. ф-лы, 9 ил., 1 табл.
Комментарии