Устройство для управления и регулировки рабочих цилиндров - RU2216652C2
Код документа: RU2216652C2
Чертежи



Описание
Область техники
Изобретение относится к устройству для управления и регулировки рабочих цилиндров переднего рабочего оборудования и узлов в рабочих машинах,
предпочтительно в самоходных уборочных машинах.
Уровень техники
Общеизвестным является применение в машинах и оборудовании гидравлических или пневматических рабочих цилиндров
для осуществления прямолинейного движения, причем с помощью этих исполнительных двигателей может достигаться очень высокая редукция скорости и большие усилия подъема или перемещения.
Так, например, из патентного документа ФРГ 3628477 С2 известна рабочая машина с регулируемым по высоте передним рабочим оборудованием, которое съемно присоединено к рабочей машине с использованием гидравлического рабочего цилиндра. Посредством гидравлического рабочего цилиндра вес переднего рабочего оборудования передается на рабочую машину и одновременно рабочее оборудование приводится в желаемое рабочее положение. Целью данного решения является снижение усилий подачи и опорных нагрузок от рабочего оборудования в зависимости от условий эксплуатации и предварительно заданных величин усилия на опоре и усилия разгрузки. В гидравлической системе рабочие цилиндры соединены с гидравлическим насосом через трехходовой двухпозиционный золотниковый клапан, причем в напорной линии между золотниковым клапаном и гидравлическим рабочим цилиндром имеется датчик давления, связанный управляющей линией с регулятором давления с задающим устройством. Другой линией управления регулятор давления связан с регулировочным клапаном, который расположен в байпасной линии, соединяющей напорную линию со сливной.
С помощью такой системы действительная величина давления в гидравлическом цилиндре может регулироваться при отклонениях от заданной величины, установленной в регулирующем устройстве, с целью снижения опорных нагрузок рабочего оборудования или давления разгрузки.
Предпочтительный вариант этой системы управления является предметом европейской заявки 0610900 А1. Для улучшения известного устройства разгрузки к напорной стороне гидравлического рабочего цилиндра подсоединен нагружаемый гидроаккумулятор с встроенным перед ним дополнительным переключающим клапаном, а между напорной и сливной линиями для рабочей среды предусмотрен дополнительный переключающий клапан.
За счет такой системы переключающих клапанов при достижении в напорной полости гидравлического рабочего цилиндра и в заряжаемом гидроаккумуляторе давления, необходимого для режима разгрузки, гидравлическая система базовой машины отсоединяется от гидравлической системы разгрузки, и при этом гидроаккумулятор остается связанным с напорной полостью рабочего цилиндра для поддерживания режима разгрузки.
При изменениях давления разгрузки, которые представляют недостижение или превышение установленной заданной величины, через систему переключающих клапанов автоматически устанавливается гидравлическое сообщение напорной полости гидравлического рабочего цилиндра и гидроаккумуляторов с напорной или сливной линией.
Гидравлическая система плавающей навески для сельскохозяйственного агрегата известна из патентного документа ФРГ 3337789 А1. В данном решении напорные полости гидравлических рабочих цилиндров соединены с гидравлическим насосом через золотниковый клапан, а в ответвлении от напорной линии между золотниковым клапаном и напорными полостями рабочих цилиндров встроен гидроаккумулятор с расположенным перед ним дополнительным цилиндром с плавающим поршнем.
Благодаря такой гидравлической системе плавающей навески уборочное или переднее рабочее оборудование самоходной машины поддерживается с предварительным усилием, которое устанавливается в зависимости от его массы, таким образом, что оно может скользить по поверхности земли и при наезде на препятствие поднимается благодаря действию имеющегося в гидроаккумуляторе давления.
В области транспортных средств известны решения для пружинной подвески осей транспортных средств с демпфированием колебаний. В некоторых из них несущие нагрузку оси транспортного средства смонтированы на поворотных треугольных балансирах, которые соединены непосредственно с рамой машины с возможностью качания, как, например, в патентных документах ФРГ 1480154, 2407970, 2811873. В других решениях несущие нагрузку оси смонтированы в поворотных рычагах, шарнирно укрепленных на продольных несущих элементах, которые шарнирно укреплены одним концом на раме транспортного средства, как в патентном документе ФРГ 1092778.
Непосредственно укрепленные на раме шасси треугольные балансиры или соединенные с рамой продольные несущие элементы связаны с гидравлическим или пневматическим рабочим цилиндром. За счет крепления треугольных балансиров и продольных несущих элементов с возможностью поворотного движения и благодаря их взаимодействию с пневматической пружиной или с пневмогидравлическим рабочим цилиндром в значительной мере компенсируются или демпфируются колебания и толчки, передаваемые от ходового механизма на всю машину при ее движении. Кроме того, при этом улучшается сцепление колес с основанием и достигается хорошее приспособление ходового механизма к дорожным условиям.
Применение или перенос на инженерном уровне указанных принципиальных решений на ходовые механизмы и/или рабочее оборудование передней навески в сельскохозяйственных уборочных машинах невозможны из-за требующихся для этого конструктивных пространств.
Самоходные сельскохозяйственные машины оснащаются различными видами уборочного оборудования в зависимости от убираемого материала. Эти виды оборудования неизбежно имеют большие различия по массе. Для подъема и опускания различных видов уборочного оборудования и для создания регулируемого, предварительного усилия в подъемных и исполнительных цилиндрах с целью поддерживания плавающей навески рабочего оборудования в процессе работы необходимо предусмотреть относительно мощную гидравлическую аппаратуру.
Различия по массе особенно велики в видах уборочного оборудования самоходных полевых измельчителей. Так, для оборудования с подборщиком для уборки трав требуется рабочее давление около 4 МПа, в то время как при уборке кукурузы передним навесным уборочным оборудованием необходима подача давления до 13 МПа. Для того чтобы удовлетворить эти резко различающиеся условия, на самоходных сельскохозяйственных машинах при установке переднего навесного уборочного оборудования относительно высокой массы в дополнение к уже имеющимся гидравлическим подъемным и исполнительным цилиндрам монтируют дополнительные цилиндры, которые демонтируют при работе с передним уборочным оборудованием относительно небольшой массы.
К различающимся условиям нагрузки в уборочной машине относится также степень загрузки, состояние поля и режим работы, требующие различной настройки уборочного оборудования передней навески и ходового механизма. Эта настройка должна производиться изменением рабочих давлений в гидравлических цилиндрах, которые резко отличаются друг от друга в широком диапазоне, с тем, чтобы обеспечивать надежную эксплуатацию машины с высокой производительностью, низкими потерями убираемого материала и комфортными условиями для обслуживающего персонала. Так, при порожнем ходе с навешенным передним уборочным оборудованием, при порожнем ходе при снятом переднем оборудовании и при движении с полным зерновым бункером оси ходового механизма воспринимают и передают на машину резко различающиеся между собой нагрузки.
При уборке полевых плодов на косогорах неизбежны изменения процесса движения по сравнению с уборкой на по существу ровных площадях, так как левый и правый ходовые механизмы машины имеют различную нагрузку.
В противоположность этому при работе с жестко закрепленным на уборочной машине оборудованием передней навески пружинное движение ходового механизма должно быть по возможности минимальным или полностью заблокировано.
Указанные проблемы в самоходных уборочных машинах с переменными условиями применения и эксплуатации не могут быть решены с помощью известных из уровня техники и упомянутых выше устройств.
Сущность изобретения
Соответственно, задачей, на решение которой направлено изобретение, является создание устройства,
которое при автоматическом изменении выбранных регулировок позволяет с помощью электронной системы управления машины производить управление и регулирование рабочих цилиндров различного рабочего
оборудования передней навески и конструктивных узлов машины в зависимости от постоянно меняющихся отличных друг от друга состояний нагрузки и эксплуатации.
В соответствии с изобретением решение поставленной задачи обеспечивается в устройстве для управления и регулировки гидравлических рабочих цилиндров переднего рабочего оборудования и узлов в рабочих машинах, предпочтительно в самоходных уборочных машинах, в котором поршневые напорные полости посредством золотниковых клапанов подсоединены к центральной гидравлической системе рабочего агрегата и посредством встроенного отключающего клапана подсоединены в параллельное подключение с заряжаемым гидроаккумулятором, причем золотниковые клапаны и отключающий клапан выполнены с возможностью управления от системы управления, связанной с задатчиком заданной величины, и предусмотрены средства, которые при изменениях давления, представляющих перегрузку или падение предварительно заданной величины рабочего давления, автоматически осуществляют гидравлическое сообщение с напорной или сливной линиями гидравлической системы. Согласно изобретению рабочие цилиндры выполнены в виде рабочих цилиндров двухстороннего действия с односторонним поршневым штоком, штоковые напорные полости которых посредством переключающих клапанов избирательно связаны с поршневыми напорными полостями, с гидроаккумуляторами или со сливной линией центральной гидравлической системы и через золотниковые клапаны соединены с центральной гидравлической системой, а один из рабочих цилиндров оснащен чувствительным элементом датчика хода, который соединен с электронной системой управления уборочной машины и предназначен для контроля и восприятия положения рабочего поршня.
Согласно первой особенности изобретения рабочие цилиндры выполнены в виде гидравлических рабочих цилиндров двухстороннего действия с односторонними поршневыми штоками, причем напорные полости цилиндров могут быть подсоединены различным образом посредством золотниковых клапанов и с помощью этих золотниковых клапанов подсоединяются к центральной гидравлической системе уборочной машины. Далее, гидравлические рабочие цилиндры непосредственно связаны в параллельное соединение с гидроаккумуляторами, перед которыми встроен отключающий клапан.
С помощью золотниковых клапанов гидравлические рабочие цилиндры двухстороннего действия переключаются таким образом, что поршневая напорная полость, которая рассчитана на режим восприятия и передачи максимальных усилий от массы, так что в данном случае поверхность поршня действует как рабочая поверхность, а штоковая полость со стороны штоковой поверхности поршня опорожняется в бак для рабочей жидкости, соединяется со штоковой полостью. Штоковая же поверхность поршня действует как рабочая поверхность только для восприятия и передачи относительно малых массовых усилий.
За счет такого выполнения при эксплуатации уборочной машины с относительно низкими нагрузками, например при порожнем движении со снятым оборудованием передней навески, работают штоковые поверхности поршней. При эксплуатации же с более высокими нагрузками, например в процессе уборки с навешенным передним уборочным оборудованием, для регулировки ходового механизма работают поршневые поверхности гидравлических рабочих цилиндров двухстороннего действия. В этом случае штоковые напорные полости подсоединяются к баку центральной гидравлической системы. При этом соотношение площадей поршневой поверхности и штоковой поверхности примерно соответствует нагрузке на ось при навешенном переднем уборочном оборудовании и без него. За счет переключения при более низких нагрузках на штоковую напорную полость и при более высоких нагрузках на поршневую напорную полость рабочее давление в обоих режимах эксплуатации выдерживается на примерно одинаковом уровне, что позволяет оптимизировать эксплуатационные характеристики гидроаккумуляторов и клапанов.
Согласно пункту 2 формулы изобретения штоковая напорная полость гидравлических цилиндров двухстороннего действия может быть непосредственно соединена с дополнительными гидроаккумуляторами. Посредством этих аккумуляторов, например, после того как произведена регулировка ходового механизма и штоковые напорные полости отсоединены от центральной гидравлической системы, выравниваются разности объемов, создающиеся при движениях поршней вследствие качаний и толчков, передаваемых от ходового механизма в процессе эксплуатации. При этом давление в гидроаккумуляторах моделирует искусственную нагрузку на ось.
Посредством предлагаемого решения может также осуществляться раздельное управление и регулирование гидравлических рабочих цилиндров, предусмотренных для ходового механизма в качестве установочных и демпфирующих цилиндров, с тем, чтобы компенсировать в уборочной машине нагрузки от наклонных положений. При этом снижается влияние наклонов уборочной машины.
Исполнительные элементы золотниковых, переключающих и отключающих клапанов могут быть соединены с электронной системой управления уборочной машины, причем ко входу системы управления подсоединен стратегический преселектор (устройство предварительного выбора) для выбора ожидаемого режима нагрузки и положения чувствительного элемента датчика рабочего хода. Чувствительные элементы датчиков рабочего хода связаны, например, с гидравлическими цилиндрами установки и демпфирования левого и правого ходовых механизмов и служат для контроля положения рабочих поршней. Посредством сравнения заданных и действительных величин в электронной системе управления машины сравнительно простым путем может осуществляться контроль и регулирование ходовых механизмов по введенным в стратегический преселектор заданным величинам.
В соответствии с предварительно заданными величинами через управляемые центральной системой управления машины золотниковые клапаны в рабочие цилиндры и гидроаккумуляторы подается рабочее давление до тех пор, пока воспринимаемая чувствительным элементом датчика действительная величина не достигнет предварительно заданной величины. Эта заданная величина находится примерно в середине рабочего хода рабочего поршня. После этого система управления переводит золотниковый клапан в закрытое положение и отсекает напорные полости гидравлических рабочих цилиндров и гидроаккумуляторы от центральной гидравлической системы уборочной машины, причем гидроаккумуляторы остаются связанными с напорными полостями рабочих цилиндров. Во время транспортного движения или процесса уборки поршни цилиндров могут упруго смещаться в сторону выдвижения и втягивания, и при этом возникающие разности объемов выравниваются гидроаккумуляторами. Рабочее давление в исполнительных и демпферных цилиндрах соответствует величине, которая является аналогом действующей нагрузки на оси.
В другом предпочтительном варианте выполнения исполнительные и демпферные цилиндры могут быть оснащены дополнительными гидроаккумуляторами, предварительно заряженными давлением разных величин. Указанным путем обеспечивается возможность решить проблему различия давлений, например, между порожним ходом со снятым уборочным оборудованием передней навески и работой с навешенным уборочным оборудованием передней навески и полным зерновым бункером.
Краткий перечень чертежей
Далее изобретение будет описано подробно на примере осуществления со ссылками на чертежи, на которых:
фиг. 1
изображает в схематичном виде переднюю часть зерноуборочного комбайна с регулируемым посредством рабочего цилиндра передним уборочным оборудованием и передним ходовым механизмом,
фиг. 2
изображает переднюю часть самоходного полевого измельчителя, оснащенного регулируемым подборщиком или передним оборудованием для уборки кукурузы,
фиг. 3 представляет первый пример выполнения
изобретения для регулировки и управления гидравлическим рабочим цилиндром в зависимости от режима нагрузки уборочного агрегата,
фиг. 4 представляет устройство по изобретению в соответствии с
фиг.3 при применении гидравлических рабочих цилиндров двухстороннего действия с односторонними поршневыми штоками,
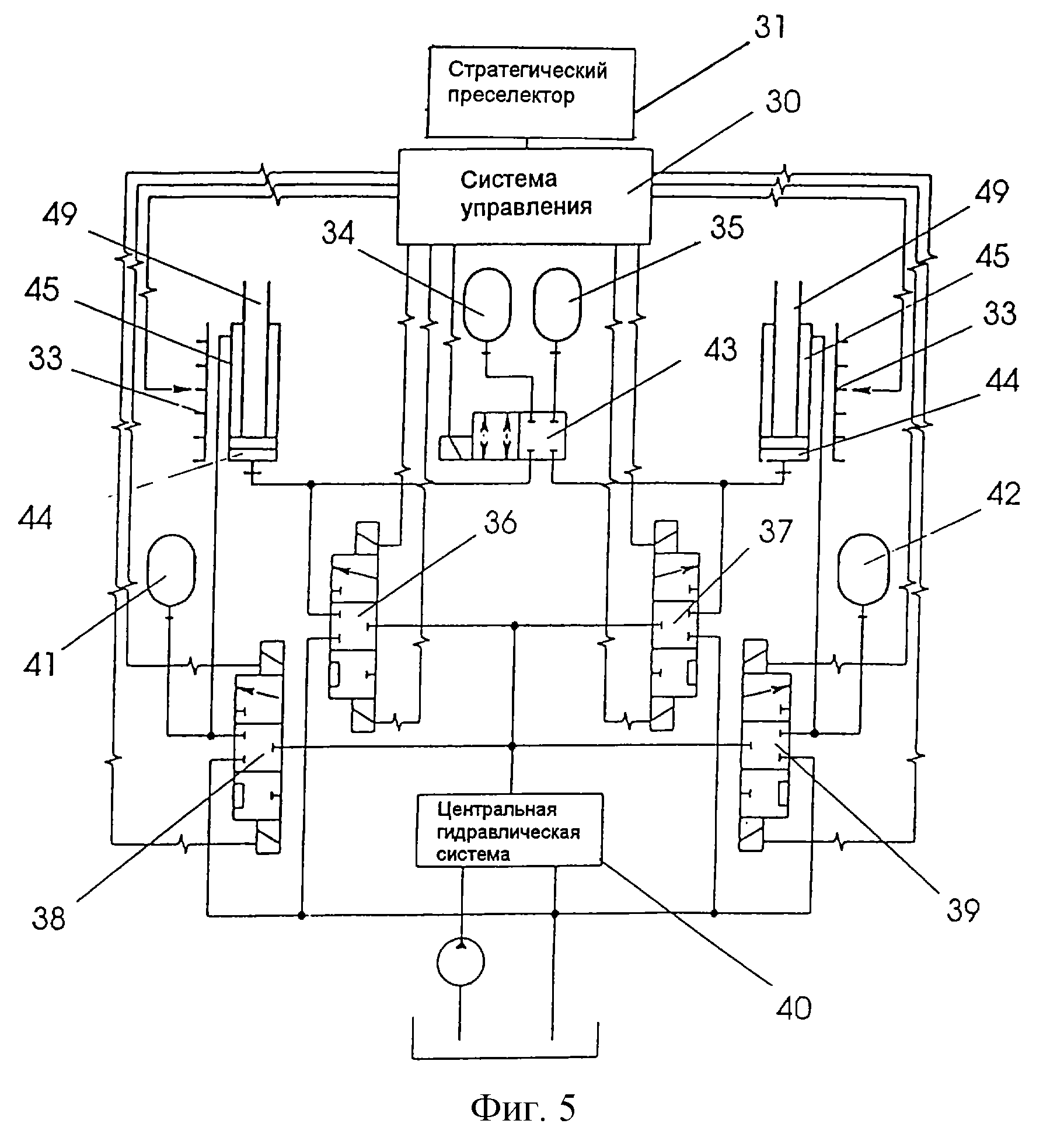
фиг. 5 представляет другой вариант выполнения по фиг.3 и 4, в котором к
штоковой полости гидравлического рабочего цилиндра подсоединен еще один гидроаккумулятор.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 схематично
показана передняя часть зерноуборочного комбайна 1 с зерновым бункером 12 и разгрузочным шнеком 13 зернового бункера. Комбайн имеет передний колесный ходовой механизм с подпружиненной демпферной
подвеской и переднее уборочное оборудование 2, в котором схематично представлены только режущий аппарат 3, питающий шнек 4 с подборщиком и наклонный конвейер 5 для подачи убираемого материала в
уборочную машину. Переднее уборочное оборудование 2 известным образом установлено на зерноуборочном комбайне 1 с помощью подъемных гидравлических цилиндров (не показаны) и соединено с ним с
возможностью пространственного перемещения относительно осей x, y и z. Для регулировки и поддержания рабочего положения, в котором режущий аппарат 3 в процессе работы скользит над поверхностью поля с
наименьшим возможным зазором и поднимается при наезде на препятствие, кроме подъемных гидравлических цилиндров присоединения уборочного оборудования 2 к комбайну 1 служит также гидравлический рабочий
цилиндр 6. Поршневой шток гидравлического рабочего цилиндра 6 присоединен к кронштейну 27 на переднем уборочном оборудовании 2 и с помощью монтажного элемента 7 жестко соединен с комбайном 1.
Колесная ось 9 переднего ходового колеса 26 ходового механизма установлена в поворотном рычаге 8, который соединен с рамой машины с возможностью поворота вокруг точки поворота 10. Сектор поворота поворотного рычага 8 ограничивается концевыми упорами, а в пределах этого сектора опорой для него служит гидравлический рабочий цилиндр 11, который выполняет функцию исполнительного и демпфирующего цилиндра и шарнирно соединен с поворотным рычагом 8 и комбайном. С помощью гидравлического рабочего цилиндра 11 ходовой механизм предварительно настраивается в зависимости от условий нагрузки и эксплуатации, а также демпфируются колебательные движения при работе и транспортном движении. Гидравлический рабочий цилиндр 11, как и рабочий цилиндр 6, включен в гидравлическую схему центральной гидравлической системы 40 комбайна 1, как будет описано далее со ссылками на фиг.3-5.
На фиг.2 схематично показана передняя часть самоходного полевого измельчителя 14 с передним уборочным оборудованием 15, которое состоит из мотовила 16, подающих валиков 17 и подпрессовывающих валиков 18. В зависимости от убираемого материала полевой измельчитель 14 может также оснащаться передним уборочным оборудованием 29 для уборки кукурузы. Собранный подборщиком материал направляется подающими валиками 17 и подпрессовывающими валиками 18 к ножевому барабану 19, который измельчает убираемый материал при взаимодействии с противорежущей пластиной 20. Измельченный материал далее перерабатывается дробильными валиками 21 и с помощью метателя 22 отводится через разгрузочное устройство 28.
Для установки и поддержания рабочих положений уборочного оборудования 9, 15 служит гидравлический рабочий цилиндр 23. Поршневой шток гидравлического рабочего цилиндра 23 присоединен к кронштейну 24 на переднем уборочном оборудовании 15, 29 и с помощью монтажного элемента 25 жестко соединен с рамой полевого измельчителя 14. Как будет описано далее со ссылками на фиг.4 и 5, гидравлический рабочий цилиндр включен в схему центральной гидравлической системы полевого измельчителя 14 и может управляться электронной системой управления машины.
Гидравлические рабочие цилиндры 11 левого и правого ходовых механизмов, посредством которых может осуществляться регулирование ходовых механизмов в соответствии со степенью нагрузки, приспособление ходовых механизмов к различным условиям эксплуатации, согласно предпочтительному варианту выполнения являются гидравлическими рабочими цилиндрами одностороннего действия, которые подсоединены к центральной гидравлической системе 40 уборочной машины посредством золотниковых клапанов 36, 37.
Параллельно рабочим цилиндрам 11 к системе подсоединены гидроаккумуляторы 34, 35 через отключающий клапан 43. Гидроаккумуляторы 34, 35 служат для выравнивания разности объемов, которые создаются вследствие движений рабочих поршней 49 при демпфировании толчков и качаний в процессе работы машины и ходовых механизмов. Эта функция выполняется гидроаккумуляторами после того, как ходовой механизм с помощью рабочего цилиндра 11 отрегулирован в соответствии с ожидаемыми нагрузками, а связь напорной поршневой полости 44 с центральной гидравлической системой 40 отсечена с помощью электронной системы 30 управления. Исполнительные элементы золотниковых клапанов 36, 37 и отключающего клапана 43 связаны с системой 30 управления уборочной машины, причем ко входу системы 30 управления подсоединен стратегический преселектор 31 для предварительной регулировки машинистом рабочего поршня 49 рабочего цилиндра 11 в зависимости от ожидаемого режима нагрузки и положения чувствительного элемента 33 датчика рабочего хода. Чувствительные элементы 33 датчиков рабочего хода связаны с рабочими цилиндрами 11 и воспринимают положение рабочих поршней 49. Сигнал об отклонениях от установленной заданной величины, которая соответствует примерно среднему положению рабочего поршня 49, поступает в электронную систему 30 управления и вызывает срабатывание элементов управления золотниковых клапанов 36, 37 таким образом, чтобы путем изменения рабочего давления в поршневых напорных полостях 44 обеспечить втягивание или выдвижение рабочих поршней 49. При этом рабочее давление соответствует величине, которая является аналогом нагрузки на оси.
При движении по откосам наклон машины может быть скорректирован в узких пределах посредством установки правого и левого ходовых механизмов на различной высоте с помощью рабочих цилиндров 11.
При задании режима "Подрессоривание и незагруженная машина" система 30 управления приводит в действие золотниковые клапаны 36, 37 и отключающий клапан 43 и соединяет поршневые напорные полости 44 рабочих цилиндров 11 и гидроаккумуляторы 34, 35 с центральной гидравлической системой 40 уборочной машины. Рабочие поршни 49 выдвигаются до тех пор, пока чувствительный элемент 33 датчика хода не подаст сигнал о положении поршня в соответствии с величиной, заданной стратегическим преселектором 31. Как уже упоминалось, это положение находится примерно на половине хода рабочего поршня 49. После этого система 30 управления отключает золотниковые клапаны 36, 37 и отключающий клапан 43 от центральной гидравлической системы 40. В процессе последующей работы уборочной машины рабочие поршни 49 рабочих цилиндров 11 могут втягиваться и выдвигаться по типу демпферов, причем создаваемые при этом разности объемов в напорных поршневых полостях 44 выравниваются гидроаккумуляторами 34, 35.
При навеске и подъеме переднего уборочного оборудования 2 увеличивается нагрузка на оси и давление в напорной поршневой полости 44. Рабочий поршень 49 вдвигается и вытесняет рабочую жидкость в гидроаккумуляторы 34, 35. Система 30 управления воспринимает от чувствительного элемента 33 датчика рабочего хода отклонения от заданной величины и переключает золотниковые клапаны 36, 37, вследствие чего напорные полости 44 подсоединяются к центральной гидравлической системе 40. В напорные полости 44 вновь подается рабочая жидкость под давлением и рабочие поршни 49 выдвигаются до тех пор, пока чувствительные элементы 33 датчиков хода не подадут сигнал о соответствии положения рабочих поршней 49 предварительно заданной величине. После этого золотниковые клапаны 36, 37 снова переключаются системой 30 управления и напорные полости 44 рабочих цилиндров 11 прямо соединяются с гидроаккумуляторами 34, 35, чтобы воспринимать и демпфировать раскачивания и толчки во время работы. Такая же последовательность действий осуществляется, когда в ходе рабочего процесса постепенно заполняется зерновой бункер 12 и нагрузка на ось постоянно возрастает.
При опорожнении зернового бункера 12 вес машины снижается, давление в напорных полостях 44 падает и рабочие поршни выдвигаются, причем недостающий объем рабочей жидкости пополняется гидроаккумуляторами 34, 35. Отклонение рабочих поршней от заданного положения вновь воспринимается чувствительными элементами 33 датчиков хода и передается в виде сигналов в систему 30 управления. Система управления переключает золотниковые клапаны 36, 37 таким образом, что давление рабочей жидкости в напорных полостях 44 рабочих цилиндров 11 уменьшается и рабочие поршни втягиваются до тех пор, пока чувствительные элементы 33 датчиков хода не подадут сигнал о достижении заданной величины.
Указанный процесс повторяется, например, при демонтаже переднего уборочного оборудования и снижении нагрузки на оси уборочной машины.
В соответствии с другим предпочтительным примером осуществления (фиг.4) рабочие цилиндры 6, 11 и 23 являются гидравлическими цилиндрами двухстороннего действия. Такое исполнение имеет то преимущество, что при низких весовых нагрузках можно осуществлять процесс через штоковые напорные полости 45, а при высоких весовых нагрузках, требующих более высокого рабочего давления, - через поршневые напорные полости 44 рабочих цилиндров двухстороннего действия. При этом соотношение площадей штоковой и поршневой поверхностей соответствует состоянию уборочной машины по режиму нагрузки, то есть в зависимости от того, работает она с передним уборочным оборудованием 2, 15, 29 или без него. При высоких нагрузках воздействие осуществляется на поршневые поверхности, а при эксплуатации машины без уборочного оборудования передней навески воздействуют на штоковые стороны поршней. Схема устройства представлена на фиг.4.
В соответствии с фиг.4 штоковые напорные полости 45 избирательно соединяются через управляемые переключающие клапаны 47, 48 с поршневыми напорными полостями 44, с гидроаккумуляторами 34 и 35 и/или со сливной линией центральной гидравлической системы 40, а через золотниковые клапаны 36, 37 - с центральной гидравлической системой 40.
Другой вариант схемы представлен на фиг.5. Как показано на фиг.5, дополнительные гидроаккумуляторы 41, 42 подсоединены непосредственно к штоковым напорным полостям 45 и связаны через управляемые золотниковые клапаны 38, 39 с центральной гидравлической системой 40, а через золотниковые клапаны 36, 37 - с поршневыми напорными полостями 44. При этом вначале предварительное давление в гидроаккумуляторах 41, 42 организуют исходя из повышения нагрузки, а затем давление в гидроаккумуляторах 41, 42 устанавливается в соответствии с фактически действующей нагрузкой.
Таким образом, гидроаккумуляторы могут приспосабливаться для различных состояний нагрузки, требующих различного давления в гидроаккумуляторах, а поршни 49 рабочих цилиндров 6, 11, 23 могут устанавливаться в нагруженное среднее положение и удерживаться в этом среднем положении.
При условиях эксплуатации, когда рабочие поршни 49 должны работать без демпфирования, например при работе с жестко закрепленным уборочным оборудованием передней навески, гидроаккумуляторы 34, 35 отключаются с помощью отключающего клапана 43. Установка ходового механизма и переднего уборочного оборудования 2, 15, 29 производится, как было описано, посредством изменения позиции рабочего поршня 49 рабочих цилиндров 6, 11 и 23 и его положение управляется электронной системой 30 управления в соответствии с заданной величиной, введенной в стратегический преселектор 31.
Автоматическое регулирование управления ходового механизма на основе нагрузки на ось и эксплуатационных условий может быть полностью отключено для осуществления ручного регулирования. Возможность такого регулирования имеет преимущество при работе на откосах, когда левый и правый ходовые механизмы должны быть отрегулированы особенным образом.
Реферат
Устройство предназначено для управления и регулировки рабочих цилиндров, например, самоходных уборочных машин. Устройство содержит поршневые напорные полости, которые посредством золотниковых клапанов подсоединены к центральной гидравлической системе рабочего агрегата и посредством встроенного отключающего клапана подсоединены в параллельное подключение с заряжаемым гидроаккумулятором, причем золотниковые клапаны и отключающий клапан выполнены с возможностью управления от системы управления, связанной с задатчиком заданной величины, и предусмотрены средства, которые при изменениях давления, представляющих перегрузку или падение предварительно заданной величины рабочего давления, автоматически осуществляют гидравлическое сообщение с напорной или сливной линиями гидравлической системы, при этом рабочие цилиндры выполнены в виде рабочих цилиндров двухстороннего действия с односторонним поршневым штоком, штоковые напорные полости которых посредством переключающих клапанов избирательно связаны с поршневыми напорными полостями, с гидроаккумуляторами или со сливной линией центральной гидравлической системы и через золотниковые клапаны соединены с центральной гидравлической системой, а рабочий цилиндр оснащен чувствительным элементом датчика хода, который соединен с электронной системой управления уборочной машины и предназначен для контроля и восприятия положения рабочего поршня. Технический результат - повышение надежности. 2 з.п.ф-лы, 5 ил.

Комментарии