о
Изобретение относится к трикотажной и текстильной промышленности,
Цель изобретения - стабилизация подачи нити при прерывистом ее пот- с реблении.
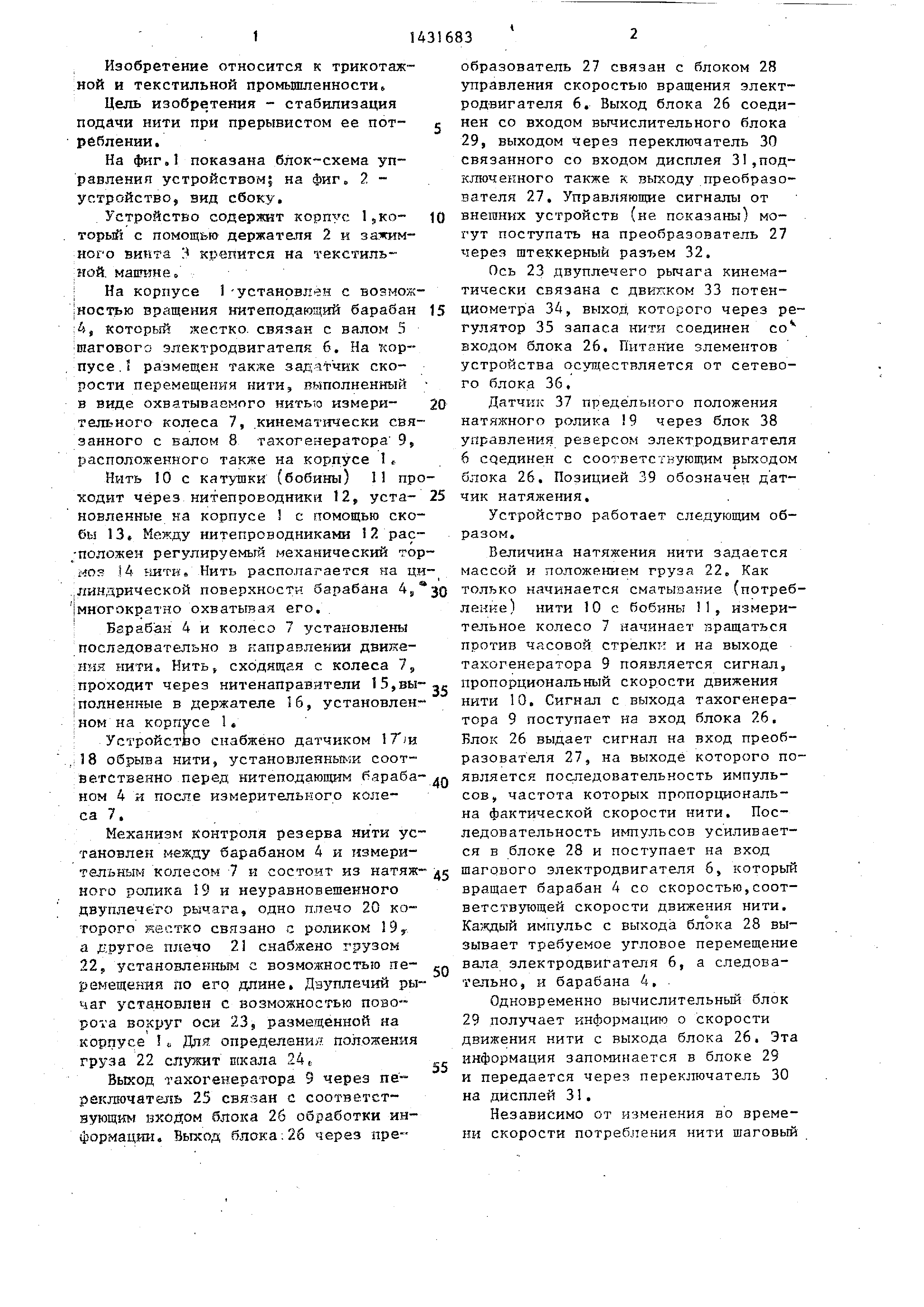
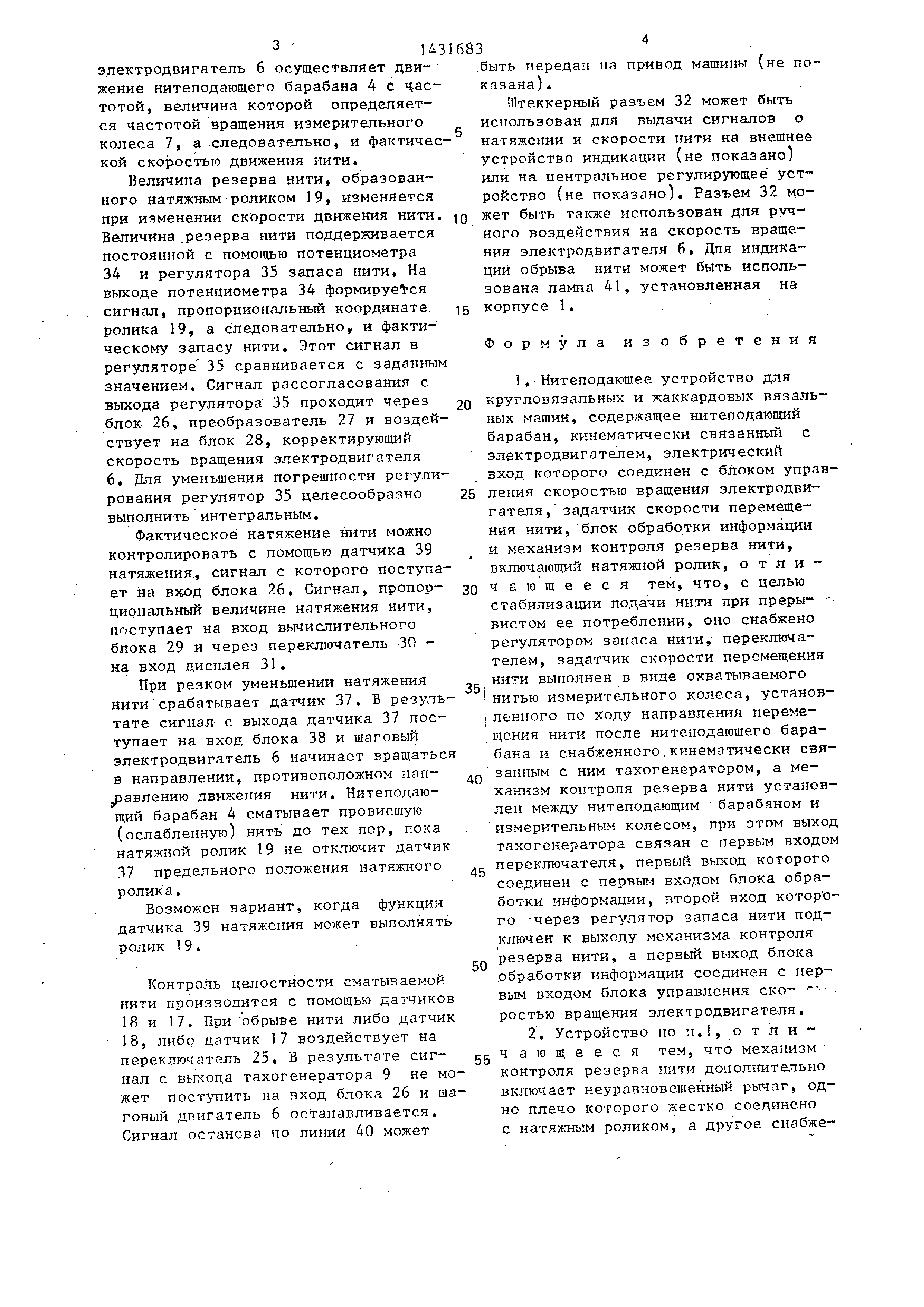
На фиг.1 показана блок-схема управления устройством; на фиг 2 - устройство, вид сбоку.
Устройство содержит корпус 1,ко- Ю торый с помощью держателя 2 и зажимного винта 3 крепится на текстиль- ;ной. машине.
: На корпусе 1-установлен с возмож- jHocibre вращения нитеподающий барабан 15 :4, который жестко, связан с валом 5 шагового электродвигатепя 6. На тсор- пусе. размещен также задатчик скорости перемещения нити, выполненный ; в виде охватываемого нитью измери- 20 тельного колеса 7, .кинематически связанного с валом 8 тахогенератора 9, расположенного также на корпусе 1 ,.
Нить 10 с катушки (бобины) 11 проходит через нитепроводники 12, уста- 25 новленные на корпусе с помощью скобы 13, Между нитепроводниками 12 рас- положен регулируемый механический тормоз 1Д шти. Нить располагается на ди- линдрической поверхности барабана |многократно охватывая его, : Барабан 4 и колесо 7 установлены посладовательно в направлении двика- иня нити. Нить, сходящая с колеса 7, проходит через нитенаправители 15, :полненные в держателе 16, установлен- ;ном на корпусе 1,
; Устройство снабжено датчиком 1 Т т :18 обрыва нити, установленньши соответственно перед нитеподающим бараба- Q ном 4 и после измерителы-юго колеса 7,
Механизм контроля резерва нити установлен между барабаном 4 и нзмери- тельнъп-i колесом 7 и состоит из натяж- g него ролика 19 и неуравновешенного двуплечего рычага, одно плечо 20 которого кестко связано с роликом 19 у а другое плечо 21 снабжено грузом 22f установленным с возможностьго пе- Q ремещення по его длине. Двуплечий рычаг установлен с возможностью пово- pova вокруг оси 23, размещенной на корпусе 11 Для: определения положения груза 22 служит пжала
Выход тахогенератора 9 через пе- реключатегш 25 связан с соответствующим входом блока 26 обработки информации . Выход блока;26 через преобразователь 27 связан с блоком 28 управления скоростью вращения электродвигателя 6. Выход блока 26 соединен со входом вычислительного блока 29, выходом через переключатель 30 связанного со входом дисплея 31,подключенного также к вьпсоду преобразователя 27. Управляющие сигналы от внешних устройств (не показаны) могут поступать на преобразователь 27 через щтеккерный раз7,ем 32.
Ось 23 двуплечего рычага кинематически связана с движком 33 потенциометра 34, выход которого через регулятор 35 запаса нити соединен со входом блока 26, Питание элементов устройства осуществляется от сетевого блока 36,
Датчик 37 предельного положения натяжного ролика 9 через блок 38 управления реверсом электродвигателя 6 соединен с соответствующим выходом блока 26, Позицией 39 обозначен датчик натяжения.
Устройство работает следующим образом .
Величина натяжения нити задается массой и положением груза 22. Как только начинается сматывание (потребление ) нити 10 с бобины П, измерительное колесо 7 начинает вращаться против часовой стрелки и на выходе тахогенератора 9 появляется сигнал, пропорциональный скорости движения нити 10. Сигнал с выхода тахогенератора 9 поступает на вход блока 26, Влок 26 выдает сигнал на вход преобразователя 27, на выходе которого появляется последовательность импульсов , частота которых пропорциональна фактической скорости нити. Последовательность импупъсов усиливается в блоке 28 и поступает на вход шагового электродвигателя 6, который вращает барабан 4 со скоростью,соответствующей скорости движения нити. импульс с выхода блока 28 вызывает требуемое угловое перемещение вала электродвигателя 6, а следовательно , и барабана 4, .
Одновременно вычислительный блок 29 получает информацию о скорости движения нити с выхода блока 26. Эта информация запоминается в блоке 29 и передается через переключатель 30 на дисплей 31.
Независимо от изменения во времени скорости потребления нити шаговый
лектродвигатель 6 осуществляет двиение нитеподагащего барабана А с часотой , величина которой определяетя частотой вращения измерительного олеса 7, а следовательно, и фактической скоростью движения нити.
Величина резерва нити, образованного натяжным роликом 19, изменяется при изменении скорости движения нити. Величина .резерва нити поддерживается постоянной с помощью потенциометра 34 и регулятора 35 запаса нити. На выходе потенциометра 34 формируе ся сигнал, пропорциональный координате ролика 19, а с ледовательно, и фактическому запасу нити. Этот сигнал в регуляторе 35 сравнивается с заданным значением. Сигнал рассогласования с выхода регулятора 35 проходит через блок 26, преобразователь 27 и воздействует на блок 28, корректирующий скорость вращения з-лектродвигателя 6, Для уменьшения погрешности регулирования регулятор 35 целесообразно выполнить интегральным.
Фактическое натяжение нити можно контролировать с помощью датчика 39 натяжения., сигнал с которого поступает на вход блока 26. Сигнал, пропорциональный величине натяжения нити, поступает на вход вычислительного блока 29 и через переключатель 30 - на вход дисплея 31.
При резком уменьшении натяжения нити срабатывает датчик 37. В результате сигнал с выхода датчика 37 поступает на вход блока 38 и шаговый электродвигатель 6 начинает вращаться в направлении, противоположном напавлению движения нити. Нитеподаю- щий барабан 4 сматывает провисшую (ослабленную) нить до тех пор, пока натяжной ролик 19 не отключит датчик 37 предельного положения натяжного ролика.
Возможен вариант, когда функции датчика 39 натяжения может выполнять ролик 19.
Контроль целостности сматываемой нити производится с помощью датчиков 18 и 17, При обрыве нити либо датчик 18, либо датчик 17 воздействует на переключатель 25. В результате сигнал с выхода тахогенератора 9 не может поступить на вход блока 26 и шаговый двигатель 6 останавливается. Сигнал останова по линии 40 может
5
0
5
0
5
0
5
0
55
.быть передан на привод машины (не показана ).
Штеккерный разъем 32 может быть использован для вьщачи сигналов о натяжении и скорости нити на внешнее устройство индикации (не показано) или на центральное регулирующее устройство (не показано). Разъем 32 может быть также использован для ручного воздействия на скорость вращения электродвигателя б. Для индикации обрыва нити может быть использована лампа 41, установленная на корпусе 1.
Формула изобретения
1. Нитеподающее устройство для кругловязальных и жаккардовых вязальных машин, содержащее нитеподающий барабан, кинематически связанный с электродвигателем, электрический
вход которого соединен с блоком управления скоростью вращения электродвигателя , задатчик скорости перемещения нити, блок обработки информации и механизм контроля резерва нити, включаюшлй натяжной ролик, отличающееся тем, что, с целью стабилизации подачи нити при преры- : вистом ее потреблении, оно снабжено регулятором запаса нити, переключателем , задатчик скорости перемещения нити выполнен в виде охватываемого нигью измерительного колеса, установ- ленного по ходу направления перемещения нити после нитеподающего бара- бана .и снабженного.кинематически связанным с ним тахогенератором, а механизм контроля резерва нити установлен между нитеподающим барабаном и измерительным колесом, при этом выход тахогенератора связан с первым входом переключателя, первьпЧ выход которого соединен с первым входом блока обработки информации, второй вход котор о- го -через регулятор запаса нити подключен к выходу механизма контроля резерва нити, а первый выход блока .обработки информации соединен с первым входом блока управления ско- - ростью вращения электродвигателя.
2.Устройство по U., отличающееся тем, что механизм контроля резерва нити дополнительно включает неуравновешенньш рычаг, одно плечо которого жестко соединено
с натяжным роликом, а другое снабже5
Но грузом, установленным с возможностью перемешивания по его длине, 3, Устройство по п.1, отличающееся тем, что оно снаб- жено датчиком .предельного положения нятяжиого ролика и блоком управления реверсом электродвигателя, при этом выход датчика предельного положения натяжного ролика через блок управле ния реверсом связан с первым выходом блока обработки информации.
4.Устройство по п.1, о т л и - чающееся тем, что электродви- гатель выполнен шаговым.
5.Устройство по п.1, отличающееся тем, что, с целью
П
цовьпиения информативности, оно снабжено -вычислительным блоком и дисплеем , при этом второй выход блока обработки информации связан с входом вычислительного блока, выходом соединенного с входом дисплея.
6. Устройство по П.1, отличающееся тем, что оно снабжено датчиками обрыва .нити, установленными соответственно перед нитеподаю- щим барабаном и после измерительного колеса, при этом выходы датчиков обрыва нити объединены и связаны с вторым входом переключателя, второй вы- ход которого соединен с вторым входом блока управления скоростью вращения электродвигателя.
Фиг.1
rf
15



Комментарии