Электрический пылесос - RU2562043C2
Код документа: RU2562043C2
Чертежи









Описание
Область техники
Настоящее изобретение относится к электрическому пылесосу, который очищает поверхность, подлежащую очистке, автономно перемещаясь по очищаемой поверхности.
Предпосылки к созданию изобретения
Существует обычный электрический пылесос, который очищает поверхность пола в качестве поверхности, подлежащей очистке, обнаруживая препятствия и другие, посредством использования, например, датчиков, и другие, и автономно перемещаясь по поверхности пола. Такой электрический пылесос содержит всасывающий канал, образованный в нижней части основного корпуса, который вмещает электрический вентилятор и включает в себя пылеуловительное устройство, и приводные колеса, прикрепленные к сторонам, и другие, всасывающего канала. Таким образом, всасывающие каналы не могут быть предусмотрены с обеих сторон, соответствующих приводным колесам, и всасывание пыли, которая расположена на поверхности пола сбоку основного корпуса, затруднено. Поэтому известно устройство, включающее в себя боковые щетки в качестве поворотных очищающих устройств, предусмотренных на обеих сторонах нижней части основного корпуса, для сметания пыли к всасывающему каналу посредством вращения на поверхности пола.
Однако боковые щетки выступают вниз относительно основного корпуса и могут задерживаться вследствие разности уровней, образуемой половиком, таким как ковер, лежащим на поверхности пола, такой как покрытие пола, и электрический пылесос может становиться не способным перемещаться (застревать).
Перечень используемых документов
Патентные документы
[PTL 1] Публикация № 2006-106816 выложенного патента Японии
[PTL 2] Публикация № 6-125861 выложенного патента Японии
[PTL 3] Публикация № 7-322977 выложенного патента Японии
Краткая сущность изобретения
Техническая проблема
Задачей настоящего изобретения является создание электрического пылесоса, выполненного с возможностью предохранения от неспособности перемещаться вследствие застревания поворотного очищающего устройства под препятствием на очищаемой поверхности.
Решение проблемы
Электрический пылесос в соответствии с одним вариантом осуществления представляет собой электрический пылесос, который очищает поверхность, подлежащую очистке, автономно перемещаясь по очищаемой поверхности. Данный электрический пылесос содержит основной корпус. Кроме того, данный электрический пылесос содержит пылеуловительный канал, предусмотренный в нижней части упомянутого основного корпуса. Кроме того, данный электрический пылесос содержит приводное устройство автономного перемещения, предусмотренное в нижней части упомянутого основного корпуса. Кроме того, данный электрический пылесос содержит очищающий элемент, который входит в контакт с очищаемой поверхностью, и поворотное очищающее устройство, предусмотренное впереди упомянутого пылеуловительного канала в нижней части основного корпуса с возможностью поворота на очищающей поверхности. Кроме того, данный электрический пылесос содержит блок обнаружения препятствия, который определяет, имеется ли на очищаемой поверхности препятствие, которое мешает автономному перемещению. Данный электрический пылесос содержит блок управления, который управляет упомянутым приводным устройством, для того чтобы обойти препятствие, посредством изменения режима автономного перемещения, когда упомянутый блок обнаружения препятствия обнаруживает препятствие, которое мешает автономному перемещению по очищаемой поверхности.
Краткое описание чертежей
Фиг.1 представляет собой пояснительный вид сбоку, показывающий участок перемещений для обхода препятствия нижней части основного корпуса электрического пылесоса в соответствии с первым вариантом осуществления в порядке от (а) до (с).
Фиг.2 представляет собой пояснительный вид сверху, показывающий перемещения для обхода препятствия нижней части основного корпуса вышеупомянутого электрического пылесоса в порядке от (а) до (с).
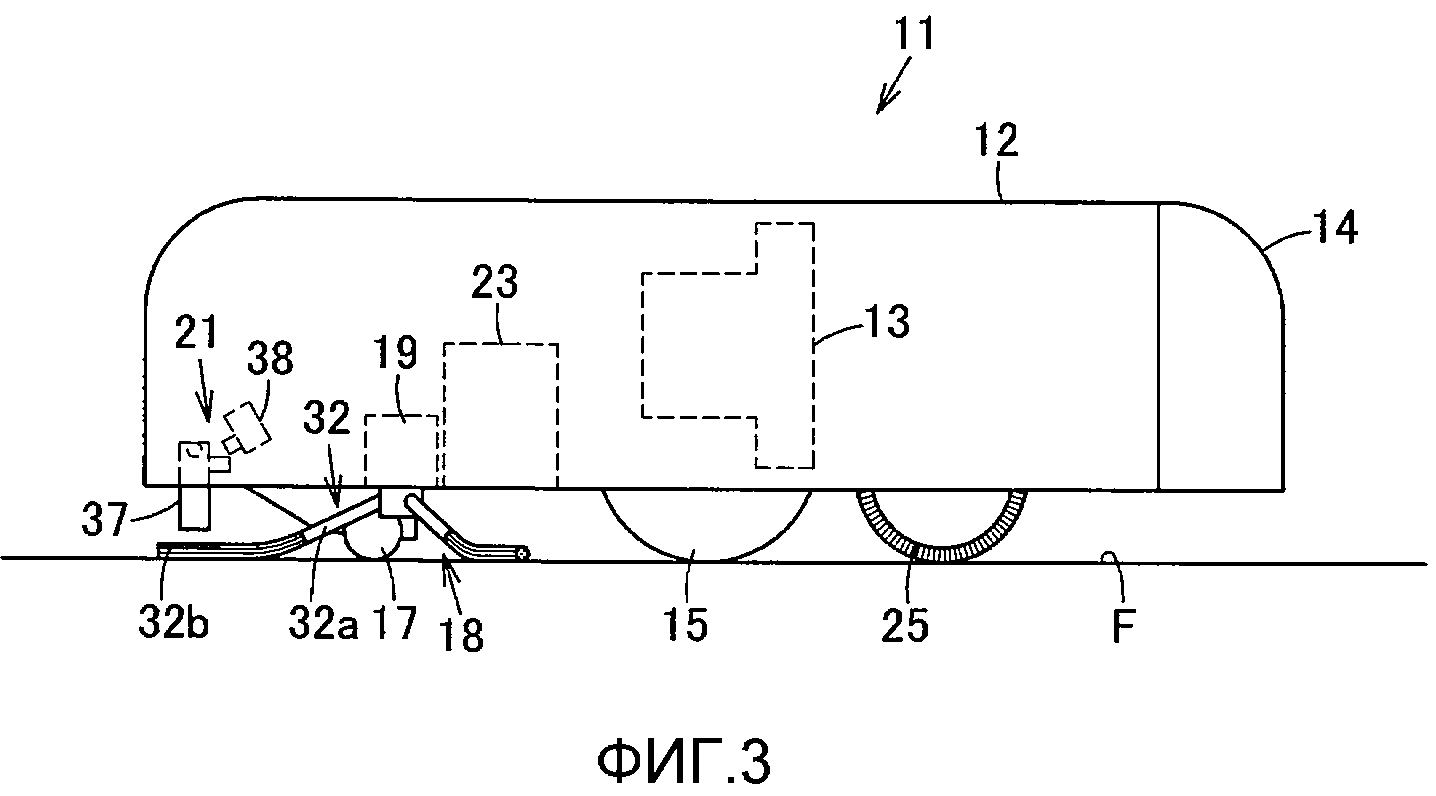
Фиг.3 представляет собой вид сбоку, показывающий вышеупомянутый электрический пылесос.
Фиг.4 представляет собой вид снизу, показывающий вышеупомянутый электрический пылесос.
Фиг.5 представляет собой блок-схему, показывающую вышеупомянутый электрический пылесос.
Фиг.6 представляет собой пояснительный вид сверху, показывающий перемещения для обхода препятствия нижней части основного корпуса электрического пылесоса в соответствии со вторым вариантом осуществления в порядке от (а) до (b).
Фиг.7 представляет собой пояснительный вид сверху, показывающий перемещения для обхода препятствия нижней части основного корпуса электрического пылесоса в соответствии с третьим вариантом осуществления.
Фиг.8 представляет собой пояснительный вид сверху, показывающий перемещения для обхода препятствия нижней части основного корпуса электрического пылесоса в соответствии с четвертым вариантом осуществления.
Фиг.9 представляет собой блок-схему, показывающую электрический пылесос в соответствии с пятым вариантом осуществления.
Фиг.10 представляет собой блок-схему, показывающую электрический пылесос в соответствии с шестым вариантом осуществления.
Фиг.11 представляет собой вид снизу, показывающий вышеупомянутый электрический пылесос.
Описание вариантов осуществления
Ниже описан первый вариант осуществления со ссылкой на фиг.1-5.
На фиг.1-5 ссылочная позиция 11 обозначает электрический пылесос, причем в данном варианте осуществления в качестве электрического пылесоса 11 для примера описан так называемый автоматический передвижной робот-уборщик, который очищает поверхность F пола в качестве поверхности, подлежащей очистке, автономно (автоматически) перемещаясь по поверхности F пола.
Данный электрический пылесос 11 содержит полый основной корпус 12, электрический вентилятор 13, размещенный в данном основном корпусе 12, пылеуловительное устройство 14, предусмотренное в основном корпусе 12 так, чтобы сообщаться со стороной всасывания электрического вентилятора 13, приводные колеса 15, которые заставляют электрический пылесос автономно перемещаться, то есть, например, множество приводных устройств автономного перемещения, электродвигатель 16 в качестве приводного устройства, которое приводит в движение данные приводные колеса 15, поворотное колесо 17, прикрепленное с возможностью поворота к нижней части основного корпуса 12, боковые щетки 18, например, пару поворотных очищающих устройств, прикрепленных к нижней части основного корпуса 12 с возможностью поворота на поверхности F пола, поворотные электродвигатели 19 в качестве поворотных приводных устройств, которые приводят в движение боковые щетки 18, соответственно, датчик 20 в качестве множества устройств обнаружения, прикрепленных к основному корпусу 12, блок 21 обнаружения препятствия, расположенный в нижней части основного корпуса 12, блок 22 управления, включающий в себя печатную плату и другие, и аккумуляторную батарею 23 в качестве батареи, образующей устройство электропитания.
Ниже приведено описание, в котором направление вдоль направления перемещения электрического пылесоса 11 (основного корпуса 12) установлено как продольное направление (направления стрелок А и В на фиг.4), а боковое направление (направление в обе стороны), перекрестно пересекающееся (перпендикулярное) с продольным направлением, установлено как поперечное направление.
Основной корпус 12 сформован из, например, синтетической смолы в плоской столбчатой (дискообразной) форме, и другие, и в центральном участке в поперечном направлении рядом с задней частью круглой нижней поверхности 12а образован всасывающий канал 24 в виде пылеуловительного канала, продольного в поперечном направлении, то есть удлиненного в горизонтальном направлении. На верхней части основного корпуса 12 размещаются различные оперативные панели и устройства индикации, и другие, хотя данные элементы не показаны.
Всасывающий канал 24 сообщается с пылеуловительным устройством 14. Кроме того, в данном всасывающем канале 24 аксиально расположена с возможностью вращения стержнеобразная вращающаяся щетка 25 в качестве вращающегося очищающего элемента, и данная вращающаяся щетка 25 приводится во вращение посредством роторного электродвигателя 26 в качестве приводного устройства очищающего элемента, прикрепленного к внутренней поверхности основного корпуса 12.
Например, вращающаяся щетка 25 образована посредством спирального прикрепления множества очищающих элементов к внешней периферийной поверхности длинной стержнеобразной детали в радиальных направлениях так, чтобы выступать наподобие стенок. Нижняя сторона данной вращающейся щетки 25 выступает вниз от нижней поверхности 12а основного корпуса 12, и концевые части очищающих элементов, размещенных в нижней стороне, расположены так, что если электрический пылесос 11 находится на поверхности F пола, то они входят в контакт с поверхностью F пола.
Пылеуловительное устройство 14 улавливает пыль, всасываемую из всасывающего канала 24 посредством приведения в действие электрического вентилятора 13, и в качестве пылеуловительного устройства может быть использовано любое устройство, такое как устройство, которое отфильтровывает и улавливает пыль посредством пылеуловительного мешка в виде бумажного пакета или фильтра, или устройство, которое отделяет и улавливает пыль посредством инерционного разделения, например центробежного разделения (циклонного разделения) или линейного разделения. Данное пылеуловительное устройство 14 расположено в задней части основного корпуса 12 на верхней стороне всасывающего канала 24 и прикреплено с возможностью удаления к основному корпусу 12.
Приводные колеса 15, по меньшей мере в своих нижних сторонах, выступают вниз от нижней поверхности 12а основного корпуса 12 и выполнены с возможностью вращения при контакте с поверхностью F пола, когда электрический пылесос 11 находится на поверхности F пола. Данные приводные колеса 15 расположены, например, на обеих сторонах приблизительно центрального участка в продольном направлении основного корпус 12 впереди всасывающего канала 24, и вращаются в продольном направлении.
Электродвигатели 16 расположены, например, в соответствии с приводными колесами 15, соответственно, и выполнены с возможностью приведения в действие независимо друг от друга. Данные электродвигатели 16 могут быть соединены с приводными колесами 15 напрямую или через непоказанное передающее устройство, такое как зубчатое зацепление или приводные ремни.
Поворотное колесо 17 расположено приблизительно в центральном участке в поперечном направлении в передней части основного корпуса 12 и представляет собой ведомое колесо, выполненное с возможностью поворота вдоль поверхности F пола.
Каждая боковая щетка 18 включает в себя дискообразное основание 31 щетки, то есть поворотную центральную часть в виде основания поворотного очищающего устройства, и, например, три очищающих элемента 32, выступающих радиально из основания 31 щетки и расположенных под углом относительно поверхности F пола. Боковые щетки 18 и 18 прикреплены к нижней поверхности 12а основного корпуса 12 так, что основания 31 и 31 щеток, каждое из которых является центром вращения, расположены на обеих сторонах впереди всасывающего канала 24 и приводных колес 15 и 15 позади поворотного колеса 17.
Может быть предусмотрено, например, три очищающих элемента 32, и очищающие элементы расположены с приблизительно одинаковыми интервалами в окружных направлениях оснований 31 и 31 щеток. Может быть предусмотрено, например, четыре или более очищающих элементов 32.
Каждый очищающий элемент 32 содержит стержень 32а, выступающий в радиальном направлении из основания 31 щетки, и множество щетинок 32b щетки в виде очищающих элементов, насаженных на концевую часть стержня 32а. Данные щетинки 32b щеток выполнены из синтетической смолы и другие, в линейном расположении более тонкие по сравнению с осью 32а. Каждый очищающий элемент 32 образован таким образом, что по меньшей мере боковые поверхности концевых частей, приблизительно все в данном варианте осуществления щетинок 32b щетки, входят в упругий контакт с поверхностью F пола, когда электрический пылесос 11 находится на поверхности F пола.
Поворотные электродвигатели 19 содержат вращающиеся валы, выступающие вниз и соединенные с основаниями 31 щеток, и способны вращать боковые щетки 18 к центральной части в поперечном направлении основного корпуса 12, другими словами, правую щетку 18 вращать против часовой стрелки, а левую щетку 18 - по часовой стрелке, то есть боковые щетки 18 сметают пыль в сторону всасывающего канала 24.
Датчик 20, например, представляет собой датчик дальности, такой как ультразвуковой датчик или инфракрасный датчик, или контактный датчик, который выполняет функцию амортизатора при непосредственном контакте с препятствием, и расположен в передней, боковой или нижней части основного корпуса 12, и способен обнаруживать наличие препятствия (стены) перед основным корпусом 12, препятствия (стены) сбоку основного корпуса или препятствия (разности уровней) под основным корпусом, и определять расстояния между данными препятствиями и основным корпусом 12.
Блок 21 обнаружения препятствия обнаруживает, находятся ли щетинки 32b щеток каждой боковой щетки 18 под половиком R, таким как ковер или соломенная циновка, который является препятствием (если половик R приподнят от поверхности F пола), и может быть выполнен по-разному, но в данном варианте осуществления, который показан на фиг.1-3, блок обнаружения препятствия включает в себя рычажный поворотный элемент 37, размещенный на нижней поверхности 12а основного корпуса 12, и микровыключатель 38, который представляет собой выключатель, размещенный в основном корпусе 12 позади поворотного элемента 37 и впереди поворотного колеса 17 в центральном положении в поперечном направлении основного корпуса 12.
Поворотный элемент 37 представляет собой элемент, воспринимающий препятствие (элемент, воспринимающий половик), и выполнен с возможностью поворота в продольном направлении относительно основного корпуса 12, и в его задней части, то есть на стороне микровыключателя 38, предусмотрена выступающая часть 37а. Данный поворотный элемент 37 расположен впереди относительно оснований 31 боковых щеток 18 позади относительно упомянутых концевых частей (щетинок 32b щеток) очищающих элементов 32, расположенных на переднем крае, и в нормальном (ненагруженном) состоянии, нижняя концевая сторона, которая является стороной концевых частей, выступает вниз от нижней поверхности 12а основного корпуса 12. Величина выступа нижней концевой части, которая является концевой частью поворотного элемента 37, от нижней поверхности 12а основного корпуса 12 установлена больше, чем величина выступа оснований 31 боковых щеток 18 от нижней поверхности 12а основного корпуса 12, и в соответствии с величиной выступа нижней концевой части поворотного элемента 37 от нижней поверхности 12а основного корпуса 12, устанавливают чувствительность блока 21 обнаружения препятствия. То есть с увеличением величины выступа нижней концевой части поворотного элемента 37 от нижней поверхности 12а основного корпуса 12 появляется возможность обнаружения более тонкого половика R, поэтому данная величина выступа установлена надлежащим образом в соответствии с толщиной половика R, который должен быть обнаружен.
Микровыключатель 38 представляет собой, например, постоянно разомкнутый или постоянно замкнутый выключатель, выполненный, например, таким образом, что кнопочная переключающая деталь 38а выступает в нижнюю переднюю сторону, то есть в сторону поворотного элемента 37, и получает возможность включать/выключать (размыкать/замыкать) только тогда, когда переключающая деталь 38а прижимается выступающей частью 37а поворотного элемента 37, продвинутой соответственно назад и повернутой в результате, например, контакта с половиком R.
В соответствии с включением/выключением микровыключателя 38 посредством поворота назад поворотного элемента 37 в результате контакта с половиком R, выступающим между нижней поверхностью 12а основного корпуса 12 и поверхностью F пола, блок 21 обнаружения препятствия определяет, находятся ли щетинки 32b каждой боковой щетки 18 под половиком R (приподнят ли половик R от поверхности F пола).
Блок 22 управления включает в себя устройство хранения информации, такое как запоминающее устройство, и устройство управления, такое как микрокомпьютер, и, как показано на фиг.5, электрически соединен с электрическим вентилятором 13, роторным электродвигателем 26, электродвигателями 16, поворотными электродвигателями 19, датчиком 20 и блоком 21 обнаружения препятствия (микровыключателем 38), и другие, и способен управлять приведением в действие электрического вентилятора 13, роторного электродвигателя 26, электродвигателей 16 и поворотных электродвигателей 19 и другие, на основе результатов обнаружений датчика 20 и блока 21 обнаружения препятствия (микровыключателя 38).
Аккумуляторная батарея 23, показанная на фиг.3 и фиг.4, подает электроэнергию в каждое устройство, показанное на фиг.5, то есть блок 22 управления, электрический вентилятор 13, роторный электродвигатель 26, электродвигатели 16, поворотные электродвигатели 19 и датчик 20, и др. Данная аккумуляторная батарея 23 расположена, например, позади поворотного колеса 17. Данная аккумуляторная батарея 23 электрически соединена с клеммами 45 и 45 подзаряда, расположенными на нижней поверхности 12а основного корпуса 12 с обеих сторон поворотного колеса 17, и выполнена с возможностью подзаряда посредством подсоединения клемм 45 и 45 подзаряда, например, к заданному непоказанному зарядному настольному устройству, установленному в заданном положении в комнате.
Ниже описаны операции в соответствии с вышеописанным первым вариантом осуществления.
Электрический пылесос 11 приводит в действие электрический вентилятор 13 и начинает очистку, например, с зарядного стола, при, например, заранее заданной установке времени в блоке 22 управления. Исходное положение для очистки может быть установлено в соответствии с любым положением, таким как исходное положение перемещения электрического пылесоса 11 или входная дверь комнаты, и др.
Электрический пылесос 11 автономно перемещается по поверхности F пола посредством приводных колес 15 и 15 в результате приведения в действие электродвигателей 16 и 16 посредством блока 22 управления. При этом блок 22 управления контролирует положение и режим перемещения электрического пылесоса 11 посредством определения расстояний до окружающих препятствий, и другие, посредством датчика 20, и в соответствии с таким определением посредством датчика 20, перемещается по поверхности F пола, обходя препятствия. Данный электрический пылесос 11 засасывает пыль на поверхности F пола с воздухом из всасывающего канала 24, к которому прикладывается отрицательное давление, через пылеуловительное устройство 14 посредством приведения в действие электрического вентилятора 13.
Одновременно, посредством надлежащего приведения в действие роторного электродвигателя 26 и поворотных электродвигателей 19 и 19, блок 22 управления вращает вращающуюся щетку 25 вдоль поверхности F пола и поворачивает боковые щетки 18 и 18 на поверхности F пола так, чтобы соскребать пыль, проходящую на поверхность F пола через очищающие элементы вращающейся щетки 25 и щетинки 32b боковых щеток 18 и собирать пыль в центральной части в поперечном направлении основного корпуса 12, то есть на стороне всасывающего канала 24, и высасывать пыль из всасывающего канала 24.
Пыль, засасываемая вместе с воздухом из всасывающего канала 24, отделяется и улавливается посредством пылеуловительного устройства 14, а воздух, из которого отделена пыль, засасывается в электрический вентилятор 13 и охлаждает электрический вентилятор 13, а затем превращается в отработанный воздух и выпускается из основного корпуса 12 наружу.
Кроме того, во время автономного перемещения электрического пылесоса 11, например, как показано на фиг.1(а), когда щетинки 32b по меньшей мере одной из боковых щеток 18 оказываются под половиком R и половик R приподнимается (отгибается), данный приподнятый половик R входит в контакт с передней частью поворотного элемента 37 блока 21 обнаружения препятствия, и когда электрический пылесос 11 продвигается дальше, как показано на фиг.1(b), поворотный элемент 37 поворачивается назад и выступающая часть 37а поворотного элемента 37 нажимает на переключающую деталь 38а микровыключателя 38, приводя микровыключатель 38 в положение включено/выключено. Другими словами, блок 21 обнаружения препятствия обнаруживает половик R, который является препятствием под основным корпусом 12. В соответствии с приведением микровыключателя 38 в положение включено/выключено, блок 22 управления определяет, что половик R находится под передней частью основного корпуса 12 (электрического пылесоса 11) и приводит в движение приводные колеса 15 посредством электродвигателей 16, чтобы изменить направление автономного перемещения электрического пылесоса 11. Подробно, блок 22 управления изменяет полярности питания энергией электродвигателей 16 и реверсирует электродвигатели 16, чтобы вращать в обратном направлении приводные колеса 15 и отвести назад электрический пылесос 11 (фиг.1(с) и фиг.2(а)). Затем, вследствие данного обратного перемещения, щетинки 32b боковой щетки 18 выходят из участка под половиком R и отделяются от половика R, и поднятие половика R устраняется, при этом поворотный элемент 37, повернутый назад половиком R, снова поворачивается вперед, и соответственно выступающая часть 37а поворотного элемента 37 отделяется от переключающей детали 37а микровыключателя 38 так, что микровыключатель 38 возвращается в положение включено/выключено. Таким образом, половик R под основным корпусом 12 уже не обнаруживается блоком 21 обнаружения препятствия, так что блок 22 управления возобновляет управление автономным перемещением электрического пылесоса 11. То есть электрический пылесос 11 обходит половик R.
Одновременно блок 22 управления изменяет направление перемещения электрического пылесоса 11, поворачивая электрический пылесос 11, например, на 90° в сторону, как показано на фиг.2(b), заставляя приводные колеса 15 (электродвигатели 16) вращаться в противоположных направлениях, и заставляет электрический пылесос 11 перемещаться в измененном направлении перемещения, как показано на фиг.2(с). Конкретно, блок 22 управления управляет приводными колесами 15 (электродвигателями 16) так, что электрический пылесос 11 изменяет свой режим автономного перемещения и обходит данное препятствие.
Когда блок 22 управления определяет, что очистка всей поверхности F пола, подлежащей очистке, закончена, блок 22 управления заставляет электрический пылесос 11 автономно перемещаться к местоположению зарядного стола, выключает электрический вентилятор 13 и электродвигатели 19 и 26, и другие, (физически и электрически) подсоединяет клеммы 45 и 45 подзарядки к зарядному столу и выключает электродвигатели 16 и 16 и прекращает движение и заряжает аккумуляторную батарею 23.
Таким образом, в соответствии с вышеописанным первым вариантом осуществления, когда блок 21 обнаружения препятствия обнаруживает, что половик R на поверхности F пола приподнят, блок 22 управления временно отводит назад электрический пылесос 11 и затем изменяет направление перемещения, чтобы обойти половик R, и таким образом можно надежно предотвратить ситуацию, когда электрический пылесос 11 становится не способным перемещаться, поскольку попадает в положение, в котором электрический пылесос приподнимает вверх половик R.
Ниже описан второй вариант осуществления со ссылкой на фиг.6. Одинаковые элементы и операции, такие же как в вышеописанном первом варианте осуществления, обозначены одинаковыми ссылочными позициями, и их описание не повторяется.
В соответствии с вторым вариантом осуществления, в вышеописанном первом варианте осуществления, когда блок 21 обнаружения препятствия обнаруживает, что половик R на поверхности F пола приподнят, блок 22 управления управляет приводными колесами 15 (электродвигателями 16) так, что электрический пылесос 11 изменяет свой режим автономного перемещения и обходит данное препятствие, то есть электрический пылесос 11 временно перемещается обратно и затем снова перемещается вперед в том же направлении.
Подробно, когда блок 21 обнаружения препятствия обнаруживает, что половик R на поверхности F пола приподнят, как показано на фиг.6(а), блок 22 управления отводит назад электрический пылесос 11 на заданное расстояние, например, в положение, при котором щетинки 32b боковой щетки 18 выходят из участка под половиком R, и снова перемещает электрический пылесос 11 вперед, как показано на фиг.6(b). Одновременно, например, когда щетинки 32b боковой щетки 18 снова находятся под половиком R, управление, показанное на фиг.6(а) и фиг.6(b), осуществляется повторно. Конкретно, повторно осуществляется перемещение назад и перемещение вперед до тех пор, пока боковая щетка 18 не оказывается над половиком R. В результате, можно более надежно предотвратить ситуацию, когда электрический пылесос 11 становится не способным перемещаться, поскольку оказывается в положении, в котором электрический пылесос приподнимает вверх половик R.
Ниже описан третий вариант осуществления со ссылкой на фиг.7. Одинаковые элементы и операции, такие же как в вышеописанном первом варианте осуществления, обозначены одинаковыми ссылочными позициями, и их описание не повторяется.
В соответствии с данным третьим вариантом осуществления, в вышеописанном первом варианте осуществления, когда блок 21 обнаружения препятствия обнаруживает, что половик R на поверхности F пола приподнят, блок 22 управления управляет приводными колесами 15 (электродвигателями 16) так, что электрический пылесос 11 изменяет свой режим автономного перемещения и обходит препятствие, то есть электрический пылесос 11 поворачивается в такое положение, чтобы обойти половик R.
Подробно, когда блок 21 обнаружения препятствия обнаруживает, что половик R на поверхности F пола приподнят, посредством вращения приводных колес 15 (электродвигателей 16) в противоположных направлениях, блок 22 управления поворачивает электрический пылесос 11, например, на 90° или больше в такое положение, чтобы щетинки 32b боковой щетки 18 вышли из участка под половиком R, как показано на фиг.7. Во время данного поворота боковые щетки 18 (поворотные электродвигатели 19) могут прекращать вращаться. После этого электрический пылесос 11 принудительно перемещается вперед в направлении, до которого электрический пылесос был повернут. В результате, можно более надежно предотвратить ситуацию, когда электрический пылесос 11 становится не способным перемещаться, поскольку оказывается в положении, в котором электрический пылесос приподнимает вверх половик R.
Ниже описан четвертый вариант осуществления со ссылкой на фиг.8. Одинаковые элементы и операции, такие же как в вышеописанном первом варианте осуществления, обозначены одинаковыми ссылочными позициями, и их описание не повторяется.
В соответствии с данным четвертым вариантом осуществления, в вышеописанном третьем варианте осуществления, когда блок 21 обнаружения препятствия обнаруживает, что половик R на поверхности F пола приподнят, блок 22 управления управляет приводными колесами 15 (электродвигателями 16) так, что электрический пылесос 11 изменяет свой режим автономного перемещения и обходит препятствие, то есть электрический пылесос 11 поворачивается в такое положение, чтобы обойти половик R, и управляет поворотными электродвигателями 19 так, чтобы вращать боковые щетки 18 в направлении, обратном (противоположном) упомянутому направлению вращения.
Подробно, во время нормального автономного перемещения, блок 22 управления поворачивает боковые щетки 18 (поворотные электродвигатели 19) к центральной части в поперечном направлении основного корпуса 12, другими словами, поворачивает правую боковую щетку 18 против часовой стрелки, а левую боковую щетку 18 по часовой стрелке так, что боковые щетки 18 собирают пыль в сторону всасывающего канала 24. Конкретно, во время нормального автономного перемещения, боковые щетки 18 вращаются в противоположных направлениях. С другой стороны, когда боковая щетка 18 попадает под половик R, блок 22 управления управляет приводными колесами 15 (электродвигателями 16) так, чтобы повернуть электрический пылесос 11, например, на 90° или больше в такое положение, чтобы обойти половик R, и управляет поворотными электродвигателями 19 так, чтобы вращать боковые щетки 18 в направлении, противоположном упомянутому направлению вращения. На фиг.8 правая боковая щетка 18 вращается в направлении, противоположном направлению поворота электрического пылесоса 11, то есть в том же направлении, что и направление вращения левой боковой щетки 18. В результате, при повороте электрического пылесоса 11 для обхода половика R, может быть уменьшена нагрузка на поворотные электродвигатели 19, которые приводят в движение боковые щетки 18, и поворот может быть облегчен.
Таким образом, в соответствии с вышеописанным четвертым вариантом осуществления, можно более надежно предотвратить ситуацию, когда щетинки 32b боковых щеток 18 застревают под половиком R и мешают повороту электрического пылесоса 11, так что электрический пылесос 11 может быть легко и надежно повернут, чтобы обойти половик R.
Таким образом, в соответствии с по меньшей мере одним из вышеописанных вариантов осуществления, при образовании поворотного элемента 37 блока 21 обнаружения препятствия, который выступает вниз относительно нижней поверхности 12а основного корпуса 12, можно более надежно обнаружить посредством блока 21 обнаружения препятствия, что щетинки 32b каждой боковой щетки 18 находятся под половиком R.
Кроме того, при образовании блока 21 обнаружения препятствия рядом с поворотным элементом 37, который выступает в нижней части основного корпуса 12 на стороне впереди всасывающего канала 24 и выполнен с возможностью поворота в продольном направлении, и микровыключателя 38, который расположен позади поворотного элемента 37 и переключается в положение включено/выключено в положении, если поворотный элемент 37 поворачивается назад, блок 21 обнаружения препятствия, который способен обнаруживать половик R и поднятие половика R посредством определения, находится ли половик R под основным корпусом 12, посредством блока 22 управления в соответствии с приведением микровыключателя 38 в положение включено/выключено, может быть выполнен механически просто. Таким образом, нет необходимости использовать дорогостоящие датчики и другие, отдельно, и можно уменьшить стоимость изготовления.
Ниже описан пятый вариант осуществления со ссылкой на фиг.9. Одинаковые элементы и операции, такие же как в вышеописанном первом варианте осуществления, обозначены одинаковыми ссылочными позициями, и их описание не повторяется.
В соответствии с пятым вариантом осуществления, вместо блока 21 обнаружения препятствия в каждом вышеописанном варианте осуществления, предусмотрен датчик 51 тока в качестве блока обнаружения препятствия, который обнаруживает, что щетинки 32b каждой боковой щетки 18 находятся под половиком R, посредством определения тока, протекающего в каждом поворотном электродвигателе 19.
Конкретно, когда щетинки 32b каждой боковой щетки 18 находятся под половиком R, вследствие фрикционного сопротивления между щетинками 32b щеток и половиком R, вращение каждой боковой щетки 18 прекращается или каждая боковая щетка 18 становится трудно вращаемой, и поэтому нагрузка (ток) поворотного электродвигателя 19, который вращает каждую боковую щетку 18, становится относительно высокой. Таким образом, посредством определения тока, протекающего в каждом поворотном электродвигателе 19 посредством датчика 51 тока, можно надежно обнаружить, что щетинки 32b каждой боковой щетки 18 находятся под половиком R.
К тому же датчик 51 тока может быть установлен внутри основного корпуса 12, не выступая наружу, так что датчик тока не задерживается различными препятствиями, и другие, и не мешает автономному перемещению электрического пылесоса 11.
Ниже описан шестой вариант осуществления со ссылкой на фиг.10 и фиг.11. Одинаковые элементы и операции, такие же как в вышеописанном первом варианте осуществления, обозначены одинаковыми ссылочными позициями, и их описание не повторяется.
В соответствии с данным шестым вариантом осуществления, вместо блока 21 обнаружения препятствия в вышеописанных первом-четвертом вариантах осуществления, предусмотрен датчик 55 дальности в качестве блока обнаружения препятствия, который обнаруживает, что щетинки 32b каждой боковой щетки 18 находятся под половиком R, посредством измерения расстояния между нижней поверхностью 12а основного корпуса 12 и поверхностью F пола, причем упомянутый датчик 55 дальности расположен за пределами радиусов С вращения боковых щеток 18.
Конкретно, датчик 55 дальности расположен, например, в центральной части в поперечном направлении на нижней поверхности 12а основного корпуса 12 и впереди оснований 31 боковых щеток 18 и направлен вниз, и расположен за пределами радиусов С вращения, центрированных в основаниях 31 щеток и проходящих через концевые части щетинок 32b щеток.
Если щетинки 32b каждой боковой щетки 18 расположены под половиком R, половик приподнимается, и, следовательно, при размещении датчика 55 дальности, расстояние между нижней поверхностью 12а основного корпуса 12 и стороной поверхности F пола (верхней поверхностью половика R) становится относительно малым. Таким образом, посредством определения расстояния между нижней поверхностью 12а основного корпуса 12 и стороной поверхности F пола посредством датчика 55 дальности, можно надежно обнаружить, что щетинки 32b каждой боковой щетки 18 находятся под половиком R.
К тому же датчик 55 дальности может быть установлен внутри основного корпуса 12, не выступая наружу, так что датчик тока не задерживается различными препятствиями, и другие, и не мешает автономному перемещению электрического пылесоса 11.
В вышеописанных вариантах осуществления, препятствие, которое должно быть обнаружено блоком 21 обнаружения препятствия, не ограничивается половиком R.
Блок 21 обнаружения препятствия может быть размещен, например, впереди каждой боковой щетки 18 и необязательно в нижней части основного корпуса 12, он может быть размещен, например, на боковой поверхности, и другие, основного корпуса 12.
Кроме того, в блоке 22 управления, помимо функции управления вращением приводных колес 15 и 15 посредством электродвигателей 16 и 16, предусмотрены функция управления вращениями боковых щеток 18 и 18 посредством поворотных электродвигателей 19 и 19, функция управления движением электрического вентилятора 13 и функция управления вращением вращающейся щетки 25 посредством роторного электродвигателя 26, однако данные функции могут быть предусмотрены отдельно.
В качестве устройства каждой боковой щетки 18, может быть использовано не только устройство с использованием щетинок 32b щетки в качестве очищающего элемента, но также и устройство с использованием любого очищающего элемента, например, лопаточного элемента, выполненного в форме узкой пластины, или может быть также использовано сочетание таких щетинок щетки и лопаточного элемента.
При условии, что по меньшей мере одна боковая щетка 18 предусмотрена на по меньшей мере одной стороне впереди всасывающего канала 24 основного корпуса 12, могут быть получены такие же операции и эффекты, как в вышеописанных вариантах осуществления.
Кроме того, может быть использовано устройство, которое не содержит электрический вентилятор 13 и сметает пыль на поверхности F пола посредством вращающейся щетки 25 и собирает ее в пылеуловительном устройстве 14.
В соответствии с по меньшей мере одним из вышеописанных вариантов осуществления, когда блок 21 обнаружения препятствия, расположенный впереди всасывающего отверстия 24, обнаруживает, что щетинки 32b каждой боковой щетки 18 находятся под половиком R, блок 22 управления управляет приводными колесами 15 (электродвигателями 16), для того чтобы изменить режим автономного перемещения электрического пылесоса 11 так, чтобы электрический пылесос обошел половик R, и таким образом может быть предотвращено попадание электрического пылесоса 11 в ситуацию, когда боковая щетка 18 (щетинки 32b щетки) на нижней части оказываются зажатыми под половиком R, и электрический пылесос 11 становится не способным перемещаться, то есть застревает, и поэтому электрический пылесос способен продолжать чистку при автономном перемещении.
Хотя описаны некоторые варианты осуществления, данные варианты осуществления представлены только в качестве примера и не должны ограничивать объем изобретения. В действительности новые варианты осуществления, описанные в данном документе, могут быть осуществлены во множестве других видов; кроме того, различные исключения, замены и изменения в вариантах осуществления, описанных в данном документе, могут быть выполнены без отхода от сущности настоящего изобретения. Прилагаемые пункты формулы изобретения и их эквиваленты должны охватывать такие разновидности или модификации, которые находятся в пределах объема и сущности настоящего изобретения.
Реферат
Электрический пылесос (11) включает в себя приводные колеса (15) для автономного перемещения на нижней части основного корпуса (12). Электрический пылесос (11) содержит боковые щетки (18), каждая из которых включает в себя щетинки (32b) щетки, которые входят в контакт с поверхностью (F) пола так, что боковые щетки способны вращаться сбоку впереди всасывающего канала на нижней части основного корпуса (12). Электрический пылесос (11) включает в себя блок (21) обнаружения препятствия, который обнаруживает, что щетинки (32b) боковой щетки (18) находятся под половиком (R). Электрический пылесос (11) содержит блок управления, который управляет приводными колесами (15) для изменения режима автономного перемещения и обхода половика (R), когда блок (21) обнаружения препятствия обнаруживает, что щетинки (32b) боковой щетки (18) находятся под половиком (R). 9 з.п. ф-лы, 11 ил.
Формула
поворотное очищающее устройство в направлении, противоположном направлению вращения.
Комментарии