Автоматический очиститель - RU2557509C2
Код документа: RU2557509C2
Чертежи









Описание
УРОВЕНЬ ТЕХНИКИ
[0001] В общем, очистители представляют собой бытовые устройства, которые всасывают посторонние вещества с поверхности пола для удаления этих посторонних веществ с поверхности пола. В последние годы очистители для автоматической очистки среди других очистителей называются автоматическими очистителями. Такой автоматический очиститель может всасывать посторонние вещества с поверхности пола для удаления посторонних веществ, двигаясь под действием движущей силы электродвигателя, который работает от аккумуляторной батареи.
[0002] Движущее устройство установлено в кожухе, который определяет внешний вид всего автоматического очистителя. Кроме того, автоматические очистители всасывают посторонние вещества с поверхности пола, двигаясь в заданном направлении от движущего устройства. По этой причине всасывающее отверстие для всасывания посторонних веществ с поверхности пола сформировано на нижней поверхности кожуха. Кроме того, основная щетка, которая непосредственно входит в контакт с посторонними веществами для всасывания посторонних веществ всасывающим отверстием, может быть расположена на всасывающем отверстии.
[0003] Однако, автоматический очиститель может всасывать только посторонние вещества, присутствующие в области, которая соответствует нижней стороне кожуха, по существу, области, которая соответствует нижней стороне всасывающего отверстия. Таким образом, в случае области, соответствующей внешней стороне всасывающего отверстия, очистка не может быть полностью выполнена.
[0004] Для устранения этого явления, на нижней поверхности кожуха может быть установлена боковая щетка. По меньшей мере, один участок боковой щетки продолжается наружу от кожуха.
[0005] Кроме того, боковая щетка может вращаться относительно кожуха для сметания посторонних веществ в области, соответствующей внешней стороне кожуха, по существу, всасывающему отверстию в направлении всасывающего отверстия.
[0006] Однако, автоматический очиститель, в соответствии с предшествующим уровнем техники, может иметь следующие ограничения.
[0007] Как описано выше, боковая щетка может вращаться для всасывания посторонних веществ в области, соответствующей внешней стороне всасывающего отверстия, через всасывающее отверстие. Таким образом, при увеличении длины боковой щетки, область, очищаемая автоматическим очистителем, может быть существенно увеличена. Однако, если увеличить длину боковой щетки, боковая щетка может быть повреждена во время очистки или хранения боковой щетки. Кроме того, если увеличить длину боковой щетки, область, занимаемая автоматическим очистителем, будет большей. В результате, автоматический очиститель может стать неудобным при хранении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] В вариантах осуществления предусмотрен автоматический очиститель.
[0009] В одном варианте осуществления автоматический очиститель включает в себя: кожух, имеющий всасывающее отверстие; основную щетку, расположенную на стороне всасывающего отверстия внутри кожуха; первую часть привода, выполненную с возможностью вращения основной щетки; рабочий элемент, подвижно установленный на кожухе; вторую часть привода, выполненную с возможностью генерировать энергию для движения рабочего элемента; боковую щетку, установленную с возможностью вращения на рабочем элементе для приема энергии первой части привода; и часть управления, выполненную с возможностью управления первой и второй частями привода.
[0010] Часть управления поворачивает вторую часть привода после включения второй части привода.
[0011] Часть управления включает первую часть привода в нормальный режим и, при определении препятствия, часть управления дополнительно включает вторую часть привода.
[0012] Автоматический очиститель дополнительно содержит чувствительную часть, выполненную с возможностью определения движения рабочего элемента, в котором часть управления управляет второй частью привода таким образом, что рабочий элемент движется в одном направлении, когда определяется препятствие, и когда чувствительная часть определяет ненормальную работу рабочего элемента после включения второй части привода, часть управления управляет второй частью привода таким образом, что рабочий элемент движется в другом направлении.
[0013] Автоматический очиститель дополнительно содержит движущийся модуль, расположенный на кожухе, для движения кожуха; и чувствительную часть, выполненную с возможностью определения движения рабочего элемента, в котором часть управления управляет второй частью привода таким образом, что рабочий элемент движется в одном направлении, когда определяют препятствие, и когда ненормальная работа рабочего элемента определяется чувствительной частью после включения второй части привода, часть управления управляет движущим модулем таким образом, что автоматический очиститель обходит препятствие.
[0014] Автоматический очиститель дополнительно содержит первую часть передачи энергии, выполненную с возможностью передачи энергии первой части привода на основную щетку; вторую часть передачи энергии, выполненную с возможностью передачи энергии второй части привода к рабочему элементу; и третью часть передачи энергии, выполненную с возможностью передачи силы вращения основной щетки на боковую щетку.
[0015] Автоматический очиститель дополнительно содержит первую часть передачи энергии, выполненную с возможностью передачи энергии первой части привода к основной щетке; вторую часть передачи энергии, выполненную с возможностью передачи энергии второй части привода к рабочему элементу; и третью часть передачи энергии, выполненную с возможностью передачи энергии первой части привода к боковой щетке.
[0016] Автоматический очиститель дополнительно содержит дополнительную боковую щетку, установленную с возможностью вращения на кожухе; и четвертую часть передачи энергии, выполненную с возможностью передачи энергии первой части привода к дополнительной боковой щетке.
[0017] Автоматический очиститель дополнительно содержит дополнительную боковую щетку, установленную с возможностью вращения на кожухе; и четвертую часть передачи энергии, выполненную с возможностью передачи силы вращения основной щетки к дополнительной боковой щетке.
[0018] Автоматический очиститель дополнительно содержит часть ограничения диапазона вращения, выполненную с возможностью ограничения диапазона вращения рабочего элемента.
[0019] Часть ограничения диапазона вращения содержит участок компонентов второй части передачи энергии или чувствительную часть, выполненную с возможностью определения вращения рабочего элемента.
[0020] Рабочий элемент движется из первого положения во второе положение, и затем его останавливают посредством части ограничения диапазона вращения.
[0021] Рабочий элемент выполняет возвратно-поступательные движения между первым положением и вторым положением посредством части ограничения диапазона вращения.
[0022] Рабочий элемент движется в пределах диапазона от первого положения до второго положения и останавливается в заданном положении между первым и вторым положениями частью ограничения диапазона вращения.
[0023] Когда рабочий элемент движется, вал вращения боковой щетки движется в горизонтальном направлении.
[0024] В другом варианте осуществления автоматический очиститель включает в себя: кожух, имеющий всасывающее отверстие; движущий модуль, расположенный в кожухе, для движения кожуха; рабочий элемент, подвижно установленный на кожухе; боковую щетку, установленную с возможностью вращения на рабочем элементе; первую часть привода, выполненную с возможностью генерирования энергии для движения боковой щетки; вторую часть привода, выполненную с возможностью генерирования энергии для движения рабочего элемента; чувствительную часть, выполненную с возможностью определения движения рабочего элемента; и часть управления, выполненную с возможностью управления второй частью привода на основе информации, определенной чувствительной частью.
[0025] Часть управления может управлять второй частью привода таким образом, что рабочий элемент движется в одном направлении, когда определяется угол, и когда чувствительной частью определяется ненормальная работа рабочего элемент после включения второй части привода, часть управления может управлять второй частью привода таким образом, что рабочий элемент движется в другом направлении.
[0026] Часть управления может управлять второй частью привода таким образом, что рабочий элемент движется в одном направлении, когда определяется угол, и когда чувствительной частью определяется ненормальная работа рабочего элемента после включения второй части привода, часть управления может управлять движущим модулем таким образом, что автоматический очиститель обходит угол.
[0027] Детали одного или более вариантов осуществления показаны на приложенных чертежах и представлены в описании, следующем ниже. Другие свойства будут понятны из описания и чертежей и из формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0028] На фиг. 1 показана нижняя поверхность автоматического очистителя в соответствии с вариантом осуществления.
[0029] На фиг. 2 показан вид состояния, в котором крышка автоматического очистителя отделена, в соответствии с вариантом осуществления.
[0030] На фиг. 3 показана блок-схема автоматического очистителя в соответствии с вариантом осуществления.
[0031] На фиг. 4 показан вид первой части передачи энергии и четвертой части передачи энергии в соответствии с вариантом осуществления.
[0032] На фиг. 5 показан вид второй части передачи энергии и третьей части передачи энергии в соответствии с вариантом осуществления.
[0033] На фиг. 6 показан вид в перспективе с покомпонентным представлением деталей второй части передачи энергии и третьей части передачи энергии в соответствии с вариантом осуществления.
[0034] На фиг. 7 показан вид в перспективе состояния, в котором вторая часть передачи энергии соединена с рабочим элементом в соответствии с вариантом осуществления.
[0035] На фиг. 8 показана блок-схема последовательности операций, иллюстрирующая способ управления автоматическим очистителем в соответствии с вариантом осуществления.
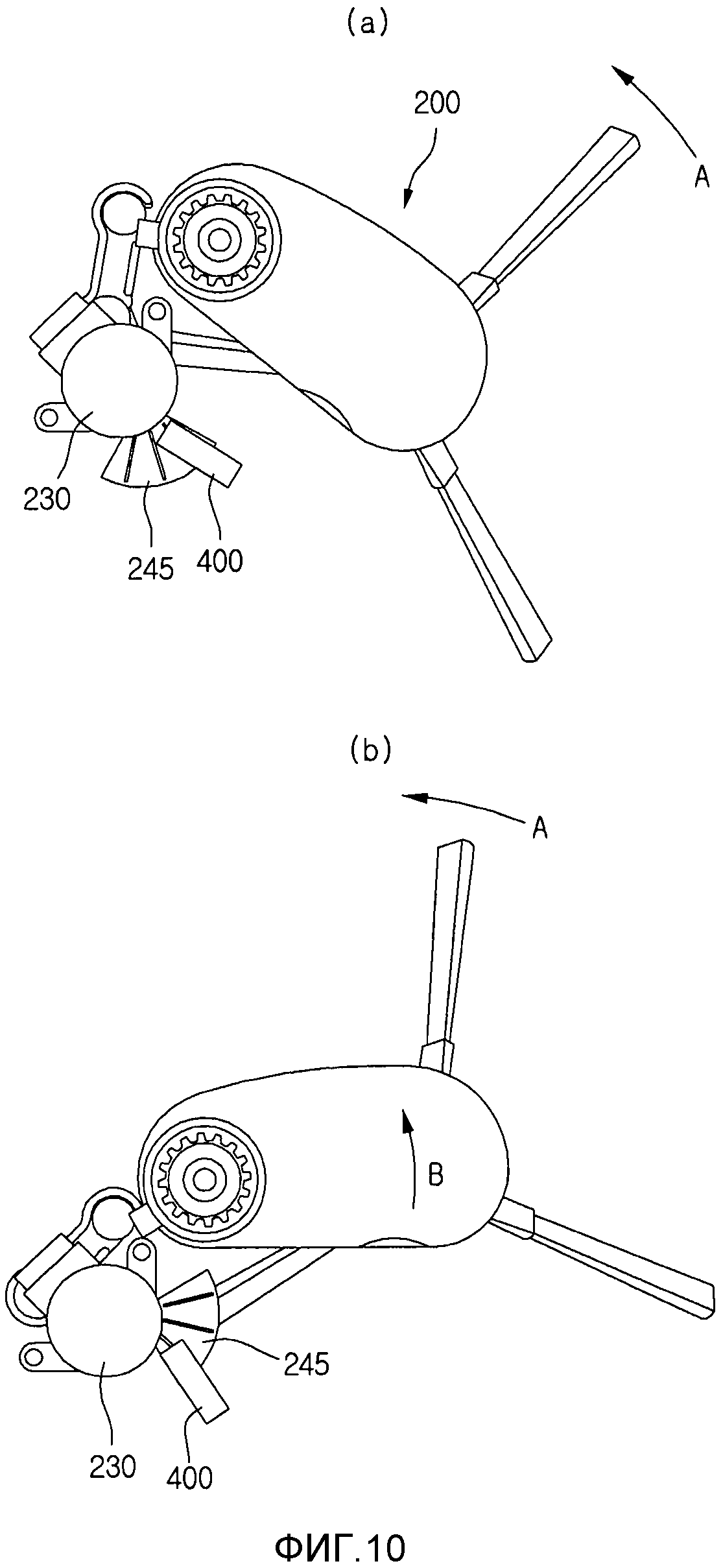
[0036] На фиг. 9 и 10 показаны виды, поясняющие рабочее состояние первого узла боковой щетки, на которых на фиг. 9A и 10A показаны виды, поясняющие состояние, в котором первый узел боковой щетки работает в нормальном режиме, и на фиг. 9B и 10B показаны виды, поясняющие состояние, в котором первый узел боковой щетки работает в режиме очистки угла.
[0037] На фиг. 11 показана блок-схема последовательности операций, иллюстрирующая способ управления автоматическим очистителем в соответствии с нормальным вращением первой боковой щетки в соответствии с вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0038] Ниже будут подробно описаны варианты осуществления настоящего раскрытия, примеры которого представлены на приложенных чертежах.
[0039] В следующем подробном описании изобретения предпочтительных вариантов осуществления будет сделана ссылка на приложенные чертежи, которые формируют его часть, и которые показаны для иллюстрации конкретных предпочтительных вариантов осуществления, в которых изобретение может быть выполнено на практике. Эти варианты осуществления описаны достаточно подробно для обеспечения для специалиста в данной области техники возможности выполнения на практике изобретения, и при этом следует понимать, что могут использоваться другие варианты осуществления, и что логические, структурные, механические, электрические и химические изменения могут быть выполнены без выхода за пределы сущности или объема изобретения. Для исключения деталей, которые не нужны для выполнения на практике изобретения специалистом в данной области техники, описание может исключать определенную информацию, известную специалисту в данной области техники. Следующее подробное описание изобретения, поэтому не следует воспринимать в ограничительном смысле.
[0040] На фиг. 1 показана нижняя поверхность автоматического очистителя в соответствии с вариантом осуществления, на фиг. 2 показан вид состояния, в котором крышка автоматического очистителя отделена, в соответствии с вариантом осуществления, и на фиг. 3 показана блок-схема автоматического очистителя в соответствии с вариантом осуществления.
[0041] На фиг. 1-3 автоматический очиститель 10, в соответствии с вариантом осуществления, включает в себя кожух 110, определяющий его внешний вид. Хотя кожух 110 имеет плоскую многогранную форму, настоящее раскрытие не ограничено формой кожуха 110.
[0042] Различные части, составляющие автоматический очиститель 10, могут быть установлены внутри кожуха 110. Например, всасывающий модуль 180, предназначенный для всасывания посторонних веществ, и модуль сбора пыли (не показан), предназначенный для сбора всасываемых посторонних веществ, могут быть расположены внутри кожуха 110. Кожух 110 может включать в себя основание 111 и крышку (не показана), соединенную с верхним участком основания 111.
[0043] Кроме того, всасывающее отверстие 112 сформировано на нижней поверхности кожуха 110. Такое всасывающее отверстие 112 может использоваться как входное отверстие для всасывания посторонних веществ в кожух 110, по существу, в модуль сбора пыли, используя всасывающий модуль 180. Всасывающее отверстие 112 может быть сформировано, например, путем выреза участка нижней поверхности кожуха 110.
[0044] Основная щетка 120 расположена в положении, соответствующем всасывающему отверстию 112, внутри кожуха 110. Основная щетка 120 может проходить через всасывающее отверстие 112 для контакта с посторонними веществами на поверхности пола, удаляя, таким образом, посторонние вещества. Основная щетка 120 установлена с возможностью вращения на кожухе 110.
[0045] Первая часть 150 привода, генерирующая силу привода для вращения основной щетки 120, расположена на кожухе 110. Энергия первой части 150 привода может быть передана на основную щетку 120 от первой части 160 передачи энергии.
[0046] Кроме того, движущий модуль, предназначенный для передвижения кожуха 110, может быть расположен на кожухе 110. Движущий модуль может включать в себя часть 142 привода колес, расположенную внутри кожуха 110, и множество колес, которые вращаются от части 142 привода колес. В текущем варианте осуществления часть 142 привода может включать в себя электродвигатель, обозначенный таким же номером ссылочной позиции, как и у колес 140.
[0047] Одна или больше сборок 200 и 300 боковых щеток могут быть расположены на нижнем участке кожуха 110. В текущем варианте осуществления структура, в которой множество узлов 200 и 300 боковых щетки расположены на кожухе 110, будет описана в качестве примера.
[0048] Сборки 200 и 300 боковых щеток могут включать в себя первую сборку 200 боковой щетки, расположенную на одной стороне переднего участка кожуха 110, и вторую сборку 300 боковой щетки, расположенную на другой стороны переднего участка кожуха 110. Однако, вторая сборка 300 боковой щетки может быть исключена в текущем варианте осуществления.
[0049] Первая сборка 200 боковой щетки может включать в себя первую боковую щетку 220, поворачивающуюся относительно первого вала 223 вращения. Первая боковая щетка 220 может быть установлена с возможностью вращения на рабочем элементе 210.
[0050] Вторая сборка 300 боковой щетки может включать в себя вторую боковую щетку 310, поворачивающуюся относительно второго вала 313 вращения.
[0051] Первая боковая щетка 220 может включать в себя первый держатель 221 щетки и множество щетинок 222 первой щетки, расположенных на держателе 221 первой щетки. Вторая боковая щетка 310 может включать в себя держатель 311 второй щетки и множество щетинок 312 второй щетки, расположенных на держателе 311 второй щетки.
[0052] Первый узел 200 боковой щетки может быть расположен на нижнем участке кожуха 110. В качестве альтернативы, по меньшей мере, один участок первого узла 200 боковой щетки может быть расположен внутри кожуха 110, и другой участок первого узла 200 боковой щетки может быть расположен за пределами кожуха 110. Например, первый узел 200 боковой щетки может работать с возможностью вращения.
[0053] Каждый из узлов 200 и 300 первой боковой щетки может всасывать посторонние вещества, присутствующие в области, соответствующей внешней части всасывающего отверстия 112, через всасывающее отверстие 112.
[0054] Кожух 110 может дополнительно включать в себя вторую часть 230 привода, генерирующую энергию для движения рабочего элемента 210, и вторую часть 240 передачи энергии для передачи энергии второй части 230 привода на рабочий элемент 210.
[0055] Кроме того, кожух 110 может дополнительно включать в себя третью часть 250 передачи энергии для передачи силы поворота основной щетки 120 к первой боковой щетке 220.
[0056] Таким образом, первая боковая щетка 220 принимает энергию, генерируемую в первой части 150 привода для вращения, и рабочий элемент 210 принимает энергию, генерируемую во второй части 230 привода, для вращения.
[0057] Кроме того, кожух 11 может дополнительно включать в себя четвертую часть 350 передачи энергии для передачи силы вращения основной щетки 120 на вторую боковую щетку 310. Однако, когда второй узел 300 боковой щетки исключен, четвертая часть 350 передачи энергии также может быть исключена.
[0058] Первая часть 160 передачи энергии и четвертая часть 350 передачи энергии могут быть соединены с валом 121 вращения основной щетки 120. Кроме того, третья часть 350 передачи энергии может быть соединена с валом 121 вращения основной щетки 120.
[0059] Таким образом, когда первую часть 150 привода включают, первая и вторая боковые щетки 220 и 310 вращаются вместе с основной щеткой 120. Кроме того, когда включают вторую часть 230 привода, рабочий элемент 210 может двигаться.
[0060] Хотя энергию первой части 150 привода передают к первой боковой щетке 220 от основной щетки 120 и от третьей части 250 передачи энергии на фиг. 2, настоящее раскрытие не ограничено этим. Например, энергия от первой части 150 привода может быть передана к первой боковой щетке 220 только через третью часть 250 передачи энергии.
[0061] Кроме того, хотя энергия первой части 150 привода передается ко второй боковой щетке 310 от основной щетки 120 и от четвертой части 350 передачи энергии на фиг. 2, настоящее раскрытие не ограничено этим. Например, энергия первой части 150 привода может быть передана ко второй боковой щетке 310 только через четвертую часть 350 передачи энергии.
[0062] Автоматический очиститель 10 может дополнительно включать в себя часть 170 управления, предназначенную для управления всей его работой, и датчик 190 препятствия, предназначенный для определения препятствия. Часть 170 управления может управлять частью 142 привода колеса и второй частью 230 привода на основе информации, определяемой датчиком 190 препятствия.
[0063] В частности, часть 170 управления может распознавать препятствие, например угол на основе информации, определяемой датчиком 190 препятствия. Когда часть 170 управления распознает препятствие, часть 170 управления может управлять работой второй части 230 привода.
[0064] Инфракрасный датчик, ультразвуковой датчик, оптический датчик и т.п. могут использоваться, как датчик 190 препятствия. Текущий вариант осуществления не ограничен видом или количеством датчиков препятствия. Кроме того, поскольку датчик препятствия может быть реализован с использованием известных технологий, подробное описание его будет исключено.
[0065] На фиг. 4 показан вид первой части передачи энергии и четвертой части передачи энергии, в соответствии с вариантом осуществления.
[0066] На фиг. 4 первая часть 160 передачи энергии может включать в себя множество зубчатых колес 161, 162, 163 и 164.
[0067] В данном описании зубчатое колесо, которое первоначально принимает энергию из множества зубчатых колес, может называться ведущим зубчатым колесом, по меньшей мере, одно зубчатое колесо, соединенное с ведущим зубчатым колесом, может называться промежуточным зубчатым колесом, и зубчатое колесо, которое в конечном итоге принимает энергию, среди множества зубчатых колес, может называться ведомым зубчатым колесом. Здесь, в данном описании, промежуточное зубчатое колесо может быть исключено. Кроме того, в данном описании зубчатые колеса, для передачи энергии, не ограничены их видом.
[0068] Ведомое зубчатое колесо 164 из множества зубчатых колес 161-164 может быть соединено с валом 121 вращения основной щетки 160. Таким образом, когда работает первая ведущая часть 150, энергия первой ведущей части 150 может быть передана на вал 121 вращения основной щетки 120 через множество зубчатых колес 161-164 для вращения основной щетки 120.
[0069] Четвертая часть 350 передачи энергии может включать в себя множество зубчатых колес 351, 352, 353 и 354. Ведомое зубчатое колесо 351 из множества зубчатых колес 351-354 может быть соединено с валом 121 основной щетки 120. В другом примере ведущее зубчатое колесо 351 может быть непосредственно соединено с валом вращения первой части 151 привода или может быть соединено с одним из множества зубчатых колес 161-164, составляющих первую часть 160 передачи энергии.
[0070] На фиг. 5 показан вид второй части передачи энергии и третьей части передачи энергии, в соответствии с вариантом осуществления, на фиг. 6 показан вид в перспективе с покомпонентным представлением деталей второй части передачи энергии и третьей части передачи энергии, в соответствии с вариантом осуществления, и на фиг. 7 показан вид в перспективе состояния, в котором вторая часть передачи энергии соединена с рабочим элементом, в соответствии с вариантом осуществления.
[0071] На фиг. 5-7 показана вторая часть 230 привода, которая может быть установлена на кожухе 110. Вторая часть 240 передачи энергии может включать в себя первый элемент 241 передачи, соединенный с валом 231 вращения второй части 230 привода, и второй элемент 248 передачи, соединенный с первым элементов 241 передачи и рабочим элементом 210. Второй элемент 248 передачи может быть непосредственно соединен с первым элементом 241 передачи или может быть опосредованно соединен с первым элементом 241 передачи через другой элемент передачи.
[0072] Часть 243 соединения вала, соединенная с валом 231 вращения второй части 230 привода, может быть расположена на первом элементе 241 передачи. Кроме того, первый соединительный шарнир 242 может быть расположен на первом элементе 241 передачи. Второй элемент 248 передачи может быть соединен с возможностью вращения с первым соединительным шарниром 242. В другом примере первый соединительный шарнир 242 может быть расположен на втором элементе 248 передачи, и первый элемент 241 передачи может быть соединен с возможностью вращения с первым соединительным шарниром 242.
[0073] Второй соединительный шарнир 211 может быть расположен снаружи от рабочего элемента 210. Кроме того, второй элемент 248 передачи может быть соединен с возможностью вращения со вторым соединительным шарниром 211. В качестве другого примера, второй соединительный шарнир 211 может быть расположен на втором элементе 248 передачи, и рабочий элемент 210 может быть соединен с возможностью вращения со вторым соединительным шарниром 211.
[0074] Выступ 245 может быть расположен на первом элементе 241 передачи. Множество прорезей 246A, 246B и 246C может быть сформировано на некотором расстоянии друг от друга в выступе 245. Когда включают вторую часть 230 привода, первый элемент 241 передачи может поворачиваться в одном направлении. По мере вращения первого элемента 241 передачи выступ 245 может также поворачиваться вместе с первым элементом 241 передачи. Поворот выступа 245 может определяться чувствительной частью 400. Например, датчик, такой как фотопрерыватель, может использоваться в качестве чувствительной части 400. Однако, текущий вариант осуществления не ограничен видом чувствительной части 400. Например, различные датчики, такие как микропереключатель и т.п., могут применяться в текущем варианте осуществления.
[0075] Часть 170 управления может управлять второй частью 230 привода на основе выходного сигнала чувствительной части 400 в соответствии с вращением выступа 245. По мере того, как часть 170 управления управляет второй частью 230 привода, может быть ограничен диапазон поворота рабочего элемента 210. Таким образом, в текущем варианте осуществления чувствительная часть 400 и выступ 245 могут называться частями ограничения диапазона поворота для ограничения диапазона поворота рабочего элемента 210. Здесь выступ 245 может быть расположен на рабочем элемент 210. В этом случае диапазон поворота рабочего элемента может быть ограничен на основе выходного сигнала чувствительной части 400, в соответствии с поворотом рабочего элемента 210.
[0076] Например, в текущем варианте осуществления, множество прорезей может включать в себя первую прорезь 246A, вторую прорезь 246B и, по меньшей мере, одну третью прорезь 46C между первой и второй прорезями 246A и 246B.
[0077] Таким образом, угол между первой и второй прорезями 246A и 246B может быть больше, чем угол между первой и третьей прорезями 246A и 246C.
[0078] Кроме того, когда чувствительная часть 400 определяет каждую из прорезей 246A, 246B и 246C, из нее выводится сигнал A. С другой стороны, когда чувствительная часть 400 определяет выступ 245, может быть выведен сигнал B, отличающийся от сигнала A.
[0079] Кроме того, когда включают вторую часть 230 привода, и затем чувствительная часть 400 определяет одну из прорезей 246A, 246B и 246C, второй модуль 230 привода может быть выключен.
[0080] Например, чувствительная часть 400 может находиться в состоянии определения первой прорези 246A перед включением второй части 230 привода. Когда включают вторую часть 230 привода, выступ 245 может вращаться вместе с первым элементом 241 передачи. Когда чувствительная часть 400 определяет вторую прорезь 246B после определения третьей прорези 246C во время поворота выступа 245, вторая часть 230 привода может быть выключена.
[0081] В другом примере, когда чувствительная часть 400 определяет третью прорезь 246c, вторая часть 230 привода может быть выключена, в соответствии с наличием или отсутствием препятствия на углу или в соответствии с формой угла.
[0082] Таким образом, угол поворота выступа 245 может изменяться в соответствии с количеством прорезей 246A - 246C. Таким образом, если участок рабочего элемента 210 находится в первом положении, когда чувствительная часть 400 определяет первую прорезь 246A, и положение рабочего элемента 210 находится во втором положении, когда чувствительная часть 400 определяет вторую прорезь 246B, рабочий элемент 210 может перемещаться между первым положением и вторым положением. В качестве альтернативы, рабочий элемент 210 может останавливаться в точке между первым и вторым положениями.
Таким образом, можно регулировать угол поворота рабочего элемента 210.
[0083] В другом примере прорези 246A - 246C могут не быть сформированы на выступе 245. В этом случае, когда чувствительная часть 400 не определяет выступ 245, может быть выведен сигнал A. Кроме того, когда чувствительная часть 400 определяет выступ 245, может быть выведен сигнал B. Например, состояние перед выполнением работы второй 230 частью привода, может представлять собой состояние, в котором чувствительная часть 400 не определяет выступ 245.
[0084] Кроме того, когда включена вторая часть 230 привода, выступ 245 может поворачиваться вместе с первым элементом 241 передачи. Кроме того, рабочий элемент 210 поворачивается в одном направлении (первом направлении, то есть, направлении, в котором рабочий элемент 210 отводят от кожуха) в результате вращения первого элемента 241 передачи. Когда выступ 245 поворачивается, чувствительная часть 400 определяет выступ 245. Кроме того, когда выступ 245 не определяется чувствительной частью 400, при определении чувствительной частью 400 выступа 245, вторая часть 230 привода может быть выключена.
[0085] Посредством выступа 245 и чувствительной части 400 может определяться, нормально ли вращается рабочий элемент. Это будет описано ниже со ссылкой на приложенные чертежи.
[0086] Третья часть 250 передачи энергии может включать в себя множество зубчатых колес 251, 252, 253, 254, 255, 260 и 261. Ведущее зубчатое колесо 251 из множества зубчатых колес 251-261 может быть соединено с валом 121 вращения основной щетки 120. В качестве другого примера, ведущее зубчатое колесо 251 может быть соединено с валом вращения первой части 150 привода.
[0087] В текущем варианте осуществления множество ремней 256 и 262 могут быть дополнительно предусмотрены для уменьшения количества зубчатых колес.
[0088] Более подробно, ведущее зубчатое колесо 251 может быть соединено с первым промежуточным зубчатым колесом 252, и первое промежуточное зубчатое колесо 252 может быть соединено со вторым промежуточным зубчатым колесом 253. Второе промежуточное зубчатое колесо 253 может быть соединено с третьим промежуточным зубчатым колесом 254. Первый ремень 256 может соединять третье промежуточное зубчатое колесо 254 с четвертым промежуточным зубчатым колесом 255. Кроме того, ведущее зубчатое колесо 251, первое - четвертое промежуточные зубчатые колеса 252-255 и первый ремень 256 могут быть расположены внутри кожухов 257 и 258 зубчатой передачи.
[0089] Четвертое промежуточное зубчатое колесо 255 может быть соединено коаксиально с пятым промежуточным зубчатым колесом 260. Кроме того, пятое промежуточное зубчатое колесо 260 и ведомое зубчатое колесо 261 могут быть соединены друг с другом вторым ремнем 262. Кроме того, ведомое зубчатое колесо 261 может быть соединено со второй боковой щеткой 220. Здесь вал зубчатого колеса ведомого зубчатого колеса 261 может использоваться, как вал вращения второй боковой щетки 220, или вал 223 вращения второй боковой щетки 220 может быть соединен с ведомым зубчатым колесом 261.
[0090] Пятое промежуточное зубчатое колесо 260, ведомое зубчатое колесо 261 и второй ремень 262 могут быть расположены внутри рабочего элемента 210. Кроме того, рабочий элемент 210 может дополнительно включать в себя крышку 212.
[0091] Отверстие, через которое проходит четвертое промежуточное зубчатое колесо 255, может быть сформировано в крышке 212. Кроме того, соединительная часть 213, соединенная с возможностью вращения с корпусами 257 и 258 зубчатой передачи, может быть расположена вокруг отверстия 214 в крышке 212. Таким образом, соединительная часть 213 может использоваться, как вал вращения рабочего элемента 210.
[0092] Текущий вариант осуществления не ограничен количеством и формой зубчатых колес, составляющих третью часть 250 передачи энергии. Кроме того, множество ремней 256 и 262 может быть исключено в третьей части 250 передачи энергии.
[0093] На фиг. 8 показана блок-схема последовательности операций, иллюстрирующая способ для управления автоматическим очистителем, в соответствии с вариантом осуществления, и на фиг. 9 показан вид, иллюстрирующий рабочее состояние узла первой боковой щетки. Здесь, на фиг. 9A и 10A, показаны виды, иллюстрирующие состояние, в котором первый узел боковой щетки работает в нормальном режиме, и на фиг. 9B и 10B показаны виды, иллюстрирующие состояние, в котором первый узел боковой щетки работает в режиме очистки угла.
[0094] На фиг. 8-10 автоматический очиститель включен для очистки поверхности, которая требует очистки (например, поверхности пола), используя автоматический очиститель (S1).
[0095] После включения автоматического очистителя, автоматический очиститель может автоматически работать в нормальном режиме или работать в нормальном режиме при поступлении команды запуска (S2).
[0096] В нормальном режиме автоматического очистителя автоматический очиститель выполняет очистку, двигаясь посредством движущего модуля.
[0097] В нормальном режиме первая часть 150 привода включена. Когда первая часть 150 привода включена, энергия от первой части 150 привода может быть передана на основную щетку 120 от первой части 160 передачи энергии. Таким образом, основная щетка 120 может вращаться.
[0098] Кроме того, энергия от первой части 150 привода может быть передана на первую боковую щетку 220 третьей частью 250 передачи энергии и может быть передана на вторую боковую щетку 310 четвертой частью 350 передачи энергии. Таким образом, первая и вторая боковые щетки 220 и 310 могут поворачиваться. Например, на фиг. 9A и 10B, первая боковая щетка 220 поворачивается в направлении A.
[0099] В то время как автоматический очиститель 10 работает в нормальном режиме, часть 170 управления определяет, распознан ли угол (S3 и S4). Более подробно, часть 170 управления определяет, выполняет ли автоматический очиститель 10 движение, следуя стенке (определяет стенку), или определяется боковое препятствие (S3). Движение следования стенке может представлять то, что автоматический очиститель движется вдоль стенки.
[00100] Выполняется ли движение вдоль стенки, или определено боковое препятствие, может быть определено на основе информации, определяемой датчиком 190 препятствия.
[00101] После определения, что автоматический очиститель 10 выполняет движение вдоль стенки, или определяется боковое препятствие (или боковая стенка), часть 170 управления может определять, определено ли препятствие спереди (передняя стенка) (S4). В общем, поскольку угол может соответствовать участку, на котором множество плоскостей (без ограничения ими), встречаются друг с другом, часть 150 управления определяет, что определен угол в случае, когда определяются стенка или боковая и передняя поверхности.
[00102] Когда определяют, что определяется угол при выполнении операций S3 и S4, часть 170 управления управляет автоматическим очистителем 10 таким образом, что автоматический очиститель 10 выполняет режим очистки угла (S5).
[00103] В режиме очистки угла часть 170 управления включает вторую часть 230 привода. Когда вторая часть 230 привода включена, рабочий элемент 210 может перемещаться из состояния (первого положения) на фиг. 9A в состояние (второго положения) на фиг. 9B (может поворачиваться). Когда рабочий элемент 210 поворачивается, вал 223 вращения первой боковой щетки 220 может двигаться в горизонтальном направлении. Кроме того, вторая часть 230 привода выключается в состоянии, когда рабочий элемент 210 поворачивается на заданный угол.
[00104] Если тип операции первого узла боковой щетки (или рабочего элемента) в нормальном режиме, в соответствии с текущим вариантом осуществления, называется первым типом, тип операции (включающий в себя положение и рабочую структуру) первого узла боковой щетки (или рабочего элемента) в режиме очистки угла может называться вторым типом. Кроме того, первый узел боковой щетки может изменяться с первого типа на второй тип в режиме очистки угла.
[00105] Более подробно, когда вторая часть 230 привода включена, первый элемент 241 передачи вращается. Когда первый элемент 241 передачи вращается, первый соединительный шарнир 242, расположенный на первом элементе 241 передачи, может двигаться. Когда первый соединительный шарнир 242 движется, второй элемент 248 передачи может двигаться, и, таким образом, второй соединительный шарнир 211 может двигаться в результате движения второго элемента 248 передачи. Поэтому, рабочий элемент 210 может поворачиваться вторым соединительным шарниром 211.
[00106] Как описано выше, первый тип первого узла боковой щетки может представлять собой состояние, в котором рабочий элемент 210 не выдвинут (то есть, рабочий элемент 210 расположен в первом положении), и второй тип первого узла боковой щетки может представлять собой состояние, в котором рабочий элемент 210 выдвинут и затем остановлен (то есть, рабочий элемент 210 расположен во втором положении).
[00107] Например, участок рабочего элемента 210 может быть расположен внутри кожуха 110, и затем рабочий элемент 210 может выступать наружу за пределы кожуха 110 в результате его поворота. Таким образом, рабочий элемент 210 может выступать наружу из кожуха 110 в результате его вращения из состояния, в котором рабочий элемент 210 перекрывается кожухом 110, как показано на фиг. 9A. Когда рабочий элемент 210 выдвигается наружу из кожуха 110 в результате его поворота, область наложения по вертикали между рабочим элементом 210 и кожухом 110 может быть уменьшена по сравнению с его состоянием перед тем, как рабочий элемент 210 выступил наружу из кожуха 110.
[00108] Когда рабочий элемент 210 поворачивается, выдвигаясь наружу из кожуха 110 в режиме очистки угла, поскольку первая боковая щетка 220, расположенная на рабочем элементе 210, располагается рядом с углом, может быть эффективно выполнена очистка угла.
[00109] В качестве другого примера, в режиме очистки угла, второй тип первого узла 200 боковой щетки может включать в себя процесс, в котором рабочий элемент 210 многократно изменяет свое положение из первого положения на второе положение и из второго положения в первое положение. Таким образом, рабочий элемент 210 может многократно перемещаться между первым положением и вторым положением. В этом случае, вторую часть 230 привода включают так, чтобы она работала в одном направлении, и затем выключают. Затем вторую часть привода 230 снова включают для работы в другом направлении, и затем ее выключают. Здесь описанные выше процессы могут выполняться многократно.
[00110] Процесс, в котором рабочий элемент 210 движется из первого положения во второе положение и затем останавливается или движется из второго положения в первое положение, может быть выполнен посредством описанной выше чувствительной части 400 и выступа 245.
[00111] Кроме того, движущий модуль может поддерживаться в остановленном состоянии в режиме очистки угла.
[00112] Затем часть 170 управления определяет, полностью ли очищен угол (S6). Например, определяется, что угол полностью очищен, когда время, в течение которого время операции первого узла боковой щетки 200 изменилось, превышает опорное время, количество оборотов первой боковой щетки (или второй части привода) превышает опорное количество после изменения типа операции первого узла 200 боковой щетки, время операции второй части привода превышает опорное время, или количество изменений типа операции превышает опорное количество.
[00113] В качестве альтернативы, определение, полностью ли очищен угол, может выполняться на основе датчика для определения состояния очистки. Например, полностью ли очищен угол, может определяться на основе изображений угла, снятых камерой, или определяться по количеству пыли, всосанной через всасывающее отверстие, используя датчик. Настоящее раскрытие не ограничено способами определения полноты очистки угла.
[00114] В соответствии с результатом, определенным в ходе операции S6, когда определяют, что угол полностью очищен, автоматический очиститель 10 снова работает в нормальном режиме. Таким образом, тип операции первого узла боковой щетки может изменяться со второго типа на первый тип.
[00115] В соответствии с вариантами осуществления, при изменении типа операции первого узла боковой щетки во время очистки угла, угол может быть эффективно очищен первым узлом боковой щетки. Кроме того, может быть предотвращено повреждение первой боковой щетки, и устраняется неудобство хранения первого узла боковой щетки.
[00116] На фиг. 11 показана блок-схема последовательности операций, иллюстрирующая способ управления автоматическим очистителем в соответствии с возможностью нормального вращения первой боковой щетки, в соответствии с вариантом осуществления.
[00117] Как показано на фиг. 11, автоматический очиститель включают для очистки поверхности, предназначенной для очистки (например, поверхности пола), используя автоматический очиститель (S11). После включения автоматического очистителя автоматический очиститель может автоматически работать в нормальном режиме или работать в нормальном режиме после ввода команды запуска (S12). В нормальном режиме автоматического очистителя автоматический очиститель выполняет очистку, двигаясь посредством движущего модуля.
[00118] Поскольку первая часть 150 привода включена в нормальном режиме, основная щетка 120 и первая, и вторая боковые щетки 220 и 310 вращаются.
[00119] В то время как автоматический очиститель 10 работает в нормальном режиме, часть 170 управления определяет, распознан ли угол (S13 и S14). Более подробно, часть 170 управления определяет, выполняет ли автоматический очиститель 10 движение, следуя стенке (определяет поверхность стенки), или определяется боковое препятствие (S13). Движение, следуя стенке, может представлять, что автоматический очиститель движется вдоль стенки.
[00120] Выполняется ли движение, следуя стенке, или определено боковое препятствие, может быть определено на основе информации, определяемой датчиком 190 препятствия.
[00121] После определения, что автоматический очиститель 10 выполняет движение, следуя стенке, или определено боковое препятствие (или боковая стенка), часть 170 управления может определять, определено ли переднее препятствие (или передняя стенка) (S14). В общем, поскольку угол может соответствовать участку, в котором множество плоскостей (без ограничения ими), встречаются друг с другом, часть 150 управления определяет, что был обнаружен угол в случае, когда были определены стенка или боковая и передняя поверхности.
[00122] Когда определяют, что был обнаружен угол в ходе операций S13 и S14, часть 170 управления включает вторую часть 230 привода (S15).
[00123] Когда вторая часть 230 привода включена, первый элемент передачи, соединенный со второй частью 230 привода, может вращаться. Когда первый элемент 241 передачи вращается, выступ 245 также может поворачиваться вместе с первым элементом 241 передачи. Таким образом, чувствительная часть 400 может определять вращение выступа 245. Когда выступ 245 вращается, рабочий элемент 210 также может поворачиваться.
[00124] Таким образом, часть 170 управления определяет, нормально ли работает рабочий элемент 210, на основе информации в отношении выступа 245, определяемой чувствительной частью 400 (S16).
[00125] Более подробно, чувствительная часть 400 может определять первую прорезь 246A выступа 245. Это выполняется, поскольку вторая часть 230 привода выключается в состоянии, когда определяется первая прорезь 246A выступа 245. Затем, когда вторая часть 230 привода включается при повороте выступа 245, чувствительная часть 400 может не определять первую прорезь 246A. Когда первая прорезь 246A постоянно определяется, или третья, или вторая прорезь 246C, или 246B не определяются, до тех пор, пока пройдет заданное время после включения второй части 230 привода, часть 170 управления может определять, что рабочий элемент 210 не работает нормально. С другой стороны, когда вторая часть 230 привода включена, и затем определяется третья или вторая прорезь 246C или 246C, до тех пор, пока не пройдет заданное время, часть 170 управления может определять, что рабочий элемент 210 работает нормально.
[00126] В текущем варианте осуществления случай, когда рабочий элемент 210 работает не нормально, может представлять собой случай, в котором энергия второй части 230 привода не передается плавно в рабочий элемент 210 через вторую часть 240 передачи энергии (внутренний фактор), или случай, когда рабочий элемент 210 не вращается из-за препятствия снаружи от автоматического очистителя 10 даже несмотря на то, что энергия второй части 230 привода плавно передается в рабочий элемент 210 через вторую часть 240 передачи энергии.
[00127] В качестве другого примера, когда прорезь не предусмотрена на выступе 245, состояние перед включением второй части 230 привода может представлять собой состояние, в котором чувствительная часть 40 не определяет выступ 245. Кроме того, когда вторая часть 230 привода включена, чувствительная часть 245 может поворачиваться и также определять выступ 245. Когда вторая часть 230 привода включена, и затем чувствительная часть 400 не определяет выступ 245, или выступ 245 постоянно определяется, пока не пройдет заданное время, часть 170 управления может определять, что рабочий элемент 210 работает ненормально.
[00128] По результату, определенному во время операции S16, когда рабочий элемент 210 нормально работает, автоматический очиститель 10 выполняет режим очистки угла (S17).
[00129] В режиме очистки угла автоматический очиститель 10 очищает угол в состоянии, в котором автоматический очиститель 10 остановлен.
[00130] Затем часть 170 управления определяет, полностью ли очищен угол (S18). Например, определяют, что угол полностью очищен, когда время, в течение которого время работы первого узла боковой щетки 200 изменилось, превышает опорное время, количество оборотов первой боковой щетки (или второй части привода) превышает опорное количество после изменения типа операции первого узла 200 боковой щетки, время операции второй части привода превышает опорное время, или количество изменений типа операций превышает опорное число.
[00131] В качестве альтернативы, был ли угол полностью очищен, может быть определено на основе датчика для определения состояния очистки. Например, может быть определено, полностью ли очищен угол, на основе изображений угла, снятых камерой, или это может быть определено по количеству пыли, всосанной через всасывающее отверстие, используя датчик. Настоящее раскрытие не ограничено способами определения, полностью ли очищен угол.
[00132] В соответствии с результатом, определенным во время операции S18, когда определяют, что угол полностью очищен, автоматический очиститель 10 снова работает в нормальном режиме. Таким образом, тип операции первого узла боковой щетки может быть изменен со второго типа на первый тип.
[00133] С другой стороны, в соответствии с результатом, определенным во время операции S16, когда рабочий элемент 210 работает ненормально, часть 170 управления выполняет управление обхода ограничения (S19). Таким образом, часть 170 управления, в основном, управляет второй частью 230 привода таким образом, что рабочий элемент 210 поворачивается в другом направлении (второе направление, в котором вставляют кожух). Например, когда рабочий элемент 210 не выдвинут в требуемое положение, рабочий элемент 210 вставлен. Затем часть 170 управления снова управляет второй частью 230 привода таким образом, что рабочий элемент 210 поворачивается в одном направлении (первом направлении).
[00134] Затем часть 170 управления снова определяет, нормально ли работает рабочий элемент (S20). Если рабочий элемент 210 работает нормально, процесс переходит к операции S17 для выполнения очистки угла.
[00135] С другой стороны, в результате, определенном при операции S20, когда рабочий элемент 210 работает ненормально, часть 170 управления управляет частью 142 привода колес (движущим модулем) таким образом, что автоматический очиститель 10 обходит угол (S21). Например, автоматический очиститель 10 может двигаться в обратном направлении из данного положения и затем может изменять направление движения в сторону от угла. Кроме того, часть 170 управления управляет второй частью 230 привода таким образом, что рабочий элемент 210 находится во вставленном состоянии. Здесь, в результате, определенном в ходе операции S20, когда рабочий элемент 210 работает ненормально, информация об ошибке может отображаться на модуле дисплея (не показан). Кроме того, информация в отношении положения (угла), в котором возникла ошибка, может быть сохранена в карте памяти (не показана).
[00136] Затем автоматический очиститель 10 снова выполняет работу в нормальном режиме. Автоматический очиститель 10 может двигаться в положении возникновения ошибки, сохраненном в карте, после выполнения очистки в нормальном режиме, для повторного выполнения режима очистки угла.
[00137] В текущем варианте осуществления, поскольку управление обходом ограничения выполняется, когда рабочий элемент 210 работает ненормально во время очистки угла, рабочие характеристики очистки угла могут быть улучшены. Кроме того, поскольку информация об ошибке отображается, когда не выполняется очистка угла, пользователь может подтвердить состояние автоматического очистителя или состояние угла.
[00138] Хотя варианты осуществления были описаны со ссылкой на множество иллюстративных вариантов его осуществления, следует понимать, что множество других модификаций и вариантов осуществления могут быть разработаны специалистом в данной области техники, которые попадают в пределы сущности и объема принципов настоящего раскрытия. Более конкретно, возможны различные вариации и модификации в составляющих частях и/или компоновок для компоновок и комбинаций субъектов в пределах объема раскрытия, чертежей и приложенной формулы изобретения. В дополнение к вариациям и модификациям в составляющих частях и/или компоновках, альтернативное варианты использования также будут понятны для специалиста в данной области техники.
Реферат
Предусмотрен автоматический очиститель. Автоматический очиститель включает в себя кожух, имеющий всасывающее отверстие, основную щетку, расположенную на стороне всасывающего отверстия внутри кожуха, первую часть привода, выполненную с возможностью вращения основной щетки, рабочий элемент, расположенный с возможностью движения на кожухе, вторую часть привода, выполненную с возможностью генерировать энергию для движения рабочего элемента, боковую щетку, выполненную с возможностью ее вращения на рабочем элементе для приема энергии из первой части привода, и часть управления, выполненную с возможностью управления первой и второй частями привода. 14 з.п. ф-лы, 11 ил.
Формула
кожух, имеющий всасывающее отверстие;
основную щетку, расположенную на стороне всасывающего отверстия внутри кожуха;
первую часть привода, выполненную с возможностью вращения основной щетки;
рабочий элемент, подвижно установленный на кожухе;
вторую часть привода, выполненную с возможностью генерировать энергию для движения рабочего элемента;
боковую щетку, установленную с возможностью вращения на рабочем элементе для приема энергии первой части привода; и
часть управления, выполненную с возможностью управления первой и второй частями привода.
в котором часть управления управляет второй частью привода таким образом, что рабочий элемент движется в одном направлении, когда определяется препятствие, и
когда чувствительная часть определяет ненормальную работу рабочего элемента после включения второй части привода, часть управления управляет второй частью привода таким образом, что рабочий элемент движется в другом направлении.
движущийся модуль, расположенный на кожухе, для движения кожуха; и
чувствительную часть, выполненную с возможностью определения движения рабочего элемента,
в котором часть управления управляет второй частью привода таким образом, что рабочий элемент движется в одном направлении, когда определяют препятствие, и
когда ненормальная работа рабочего элемента определяется чувствительной частью после включения второй части привода, часть управления управляет движущим модулем таким образом, что автоматический очиститель обходит препятствие.
первую часть передачи энергии, выполненную с возможностью передачи энергии первой части привода на основную щетку;
вторую часть передачи энергии, выполненную с возможностью передачи энергии второй части привода к рабочему элементу; и
третью часть передачи энергии, выполненную с возможностью передачи силы вращения основной щетки на боковую щетку.
первую часть передачи энергии, выполненную с возможностью передачи энергии первой части привода к основной щетке;
вторую часть передачи энергии, выполненную с возможностью передачи энергии второй части привода к рабочему элементу; и
третью часть передачи энергии, выполненную с возможностью передачи энергии первой части привода к боковой щетке.
дополнительную боковую щетку, установленную с возможностью вращения на кожухе; и
четвертую часть передачи энергии, выполненную с возможностью передачи энергии первой части привода к дополнительной боковой щетке.
дополнительную боковую щетку, установленную с возможностью вращения на кожухе; и
четвертую часть передачи энергии, выполненную с возможностью передачи силы вращения основной щетки к дополнительной боковой щетке.
Комментарии