Робот-пылесос и система робота-пылесоса - RU2262878C2
Код документа: RU2262878C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к роботу-пылесосу, системе робота-пылесоса и способу его управления и, более конкретно, к роботу-пылесосу и системе робота-пылесоса, способным идентифицировать текущее положение робота-пылесоса путем использования изображения, сфотографированного в то время, когда чистящее устройство перемещается, и способу идентификации положения.
Предпосылки создания изобретения
Типовой робот-пылесос определяет зону, подлежащую чистке, путем использования ультразвукового датчика, расположенного в его корпусе, во время перемещения вдоль контура зоны, подлежащей чистке, которая огорожена стеной или ограничена препятствием, и планирует траекторию движения при чистке для чистки зоны, подлежащей чистке. После этого робот-пылесос рассчитывает длину своего перемещения и определяет текущее положение на основе сигнала, распознаваемого датчиком, который определяет количество оборотов в минуту и угол поворота колеса робота-пылесоса. Робот-пылесос обеспечивает приведение колеса в движение для перемещения вдоль запланированной траектории перемещения при чистке. Однако при таком способе идентификации положения могут возникать расхождения между вычисленной длиной перемещения и текущим положением, полученным на основе сигнала, распознанного датчиком, и фактической длиной перемещения и положением. Расхождение обусловлено проскальзыванием колеса на неровной поверхности зоны, подлежащей чистке. По мере перемещения робота-пылесоса ошибка идентификации положения накапливается. Следовательно, робот-пылесос может отклониться от запланированной траектории перемещения при чистке вследствие накопленной ошибки идентификации положения. В результате существует возможность того, что некоторая часть зоны, подлежащей чистке, останется неочищенной или одна и та же зона будет подвергнута неоднократной чистке. Соответственно эффективность работы робота-пылесоса снижается.
Краткое изложение сущности изобретения
Настоящее изобретение было создано с решением вышеуказанных проблем, выявленных для устройств по известному уровню техники. Соответственно в основу настоящего изобретения положена задача разработать робот-пылесос и систему робота-пылесоса, которые способны эффективно выполнять заданный объем работы путем более точной идентификации текущего положения робота-пылесоса и путем использования способа идентификации положения.
Вышеуказанная задача решается путем разработки робота-пылесоса, который выполняет чистку при беспроводной связи с внешним устройством и который содержит привод, предназначенный для приведения в движение множества колес; камеру, расположенную в корпусе и предназначенную для фотографирования верхнего изображения, простирающегося перпендикулярно направлению движения робота-пылесоса; управляющее устройство, предназначенное для идентификации положения робота-пылесоса путем использования верхней камеры для фотографирования информации о положении, представляющей собой идентификационную метку, образованную на потолке рабочей зоны, и для управления приводом путем использования информации об идентифицированном положении так, чтобы обеспечить соответствие заданной операции чистки.
По меньшей мере, две идентификационные метки образованы на некотором расстоянии друг от друга, и управляющее устройство идентифицирует текущее положение путем сравнения информации о координатах идентификационной метки, появляющейся в текущем изображении, сфотографированном верхней камерой, с информацией о координатах, ранее переданной в память верхней камерой.
Предпочтительно идентификационные метки соответственно имеют различные формы, которые можно отличить друг от друга, и выполнены черным цветом.
В соответствии с другим аспектом настоящего изобретения идентификационная метка имеет множество частей, указывающих направление, которые образованы за одно целое с ней, при этом части, указывающие направление, образованы в азимутальном направлении от заранее заданной центральной точки и имеют разную длину.
Кроме того, вышеуказанная задача решается путем разработки системы робота-пылесоса, включающей в себя робот-пылесос, содержащий привод, предназначенный для приведения в движение множества колес, и верхнюю камеру, расположенную в корпусе и предназначенную для фотографирования верхнего изображения, простирающегося перпендикулярно направлению движения робота-пылесоса; и устройство дистанционного управления, имеющее беспроводную связь с роботом пылесосом, при этом устройство дистанционного управления идентифицирует текущее положение робота-пылесоса путем использования верхней камеры для фотографирования данных изображения, представляющих собой идентификационную метку, образованную на потолке рабочей зоны, и управляет направлением рабочего перемещения робота-пылесоса для выполнения заданной операции чистки на основе идентифицированного текущего положения.
Кроме того, вышеуказанная задача решается путем разработки способа управления роботом-пылесосом, имеющим верхнюю камеру, включающего в себя следующие операции: запоминание параметра исходного положения идентификационной метки, появляющейся в верхнем изображении, сфотографированном верхней камерой, при вводе рабочей команды; расчет траектории движения до заданного рабочего положения; перемещение робота-пылесоса в соответствии с рассчитанной траекторией движения; и корректировку траектории движения путем сравнения параметра исходного положения идентификационной метки с параметром положения идентификационной метки, появляющейся в верхнем изображении, фотографируемом в данный момент верхней камерой.
Краткое описание чертежей
Настоящее изобретение будет описано подробно со ссылкой на нижеуказанные чертежи, в которых:
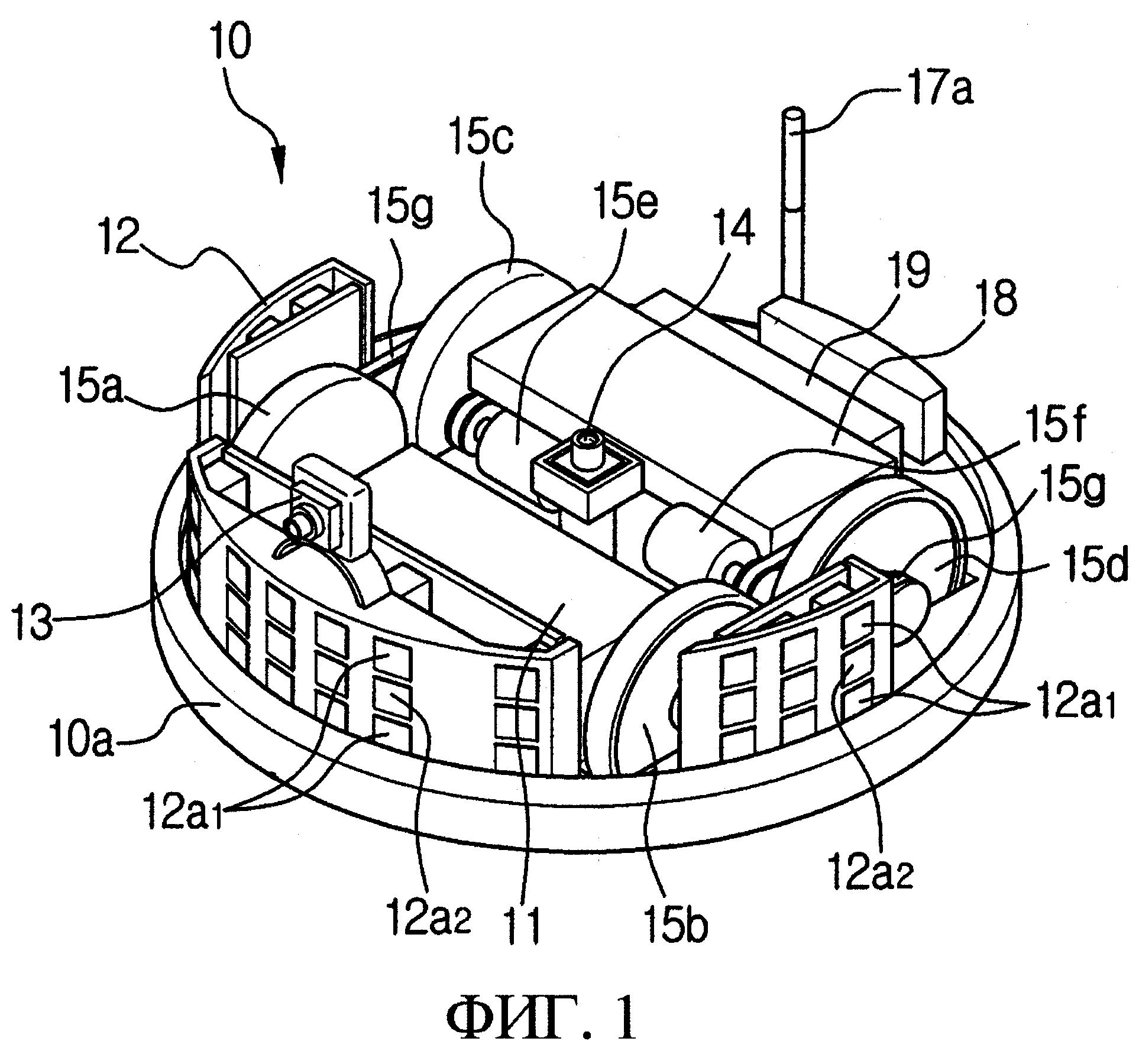
фиг.1 представляет собой перспективное изображение, показывающее робот-пылесос в соответствии с настоящим изобретением, от которого отделена крышка;
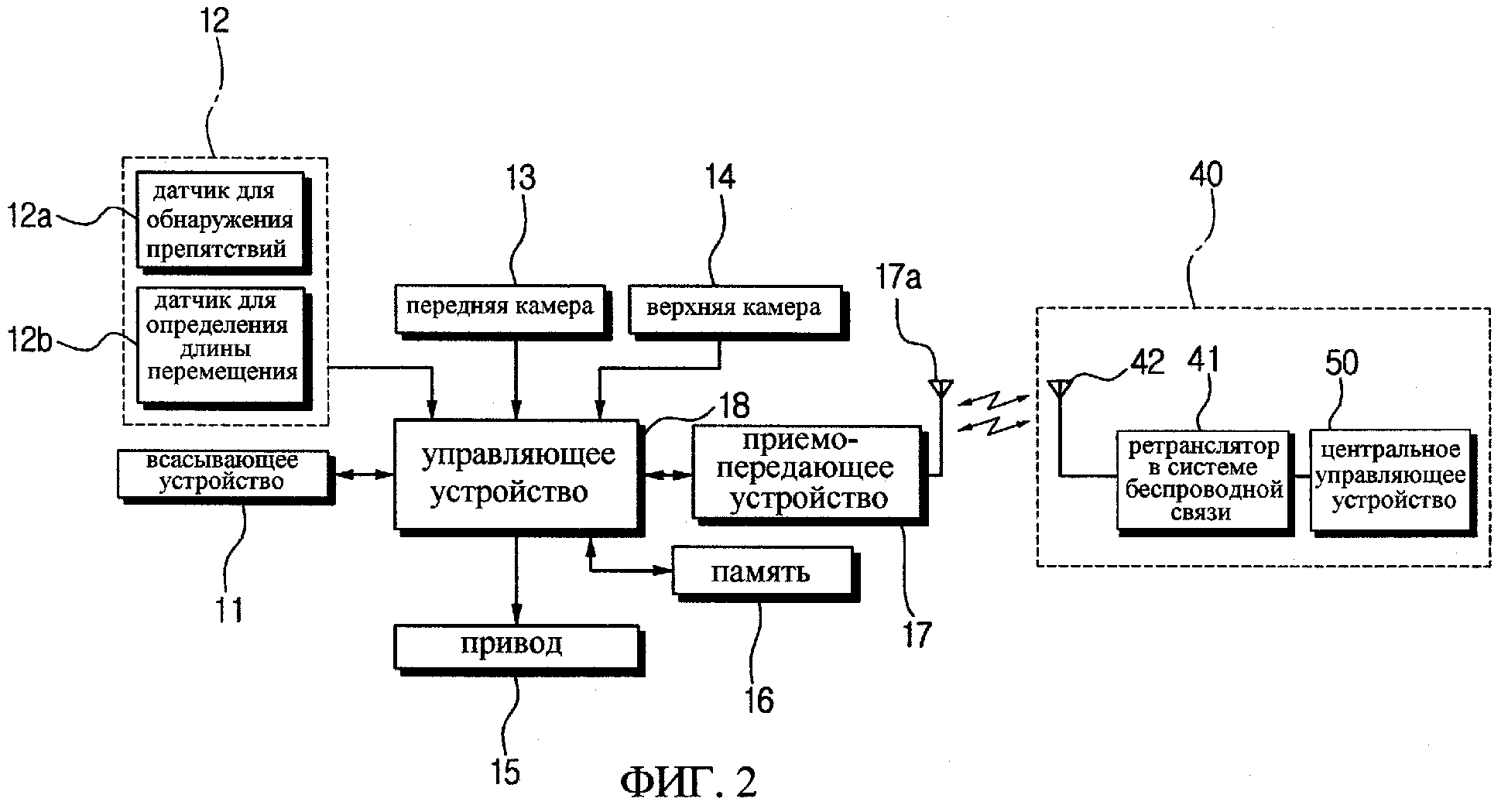
фиг.2 представляет собой блок-схему, иллюстрирующую систему робота-пылесоса согласно настоящему изобретению;
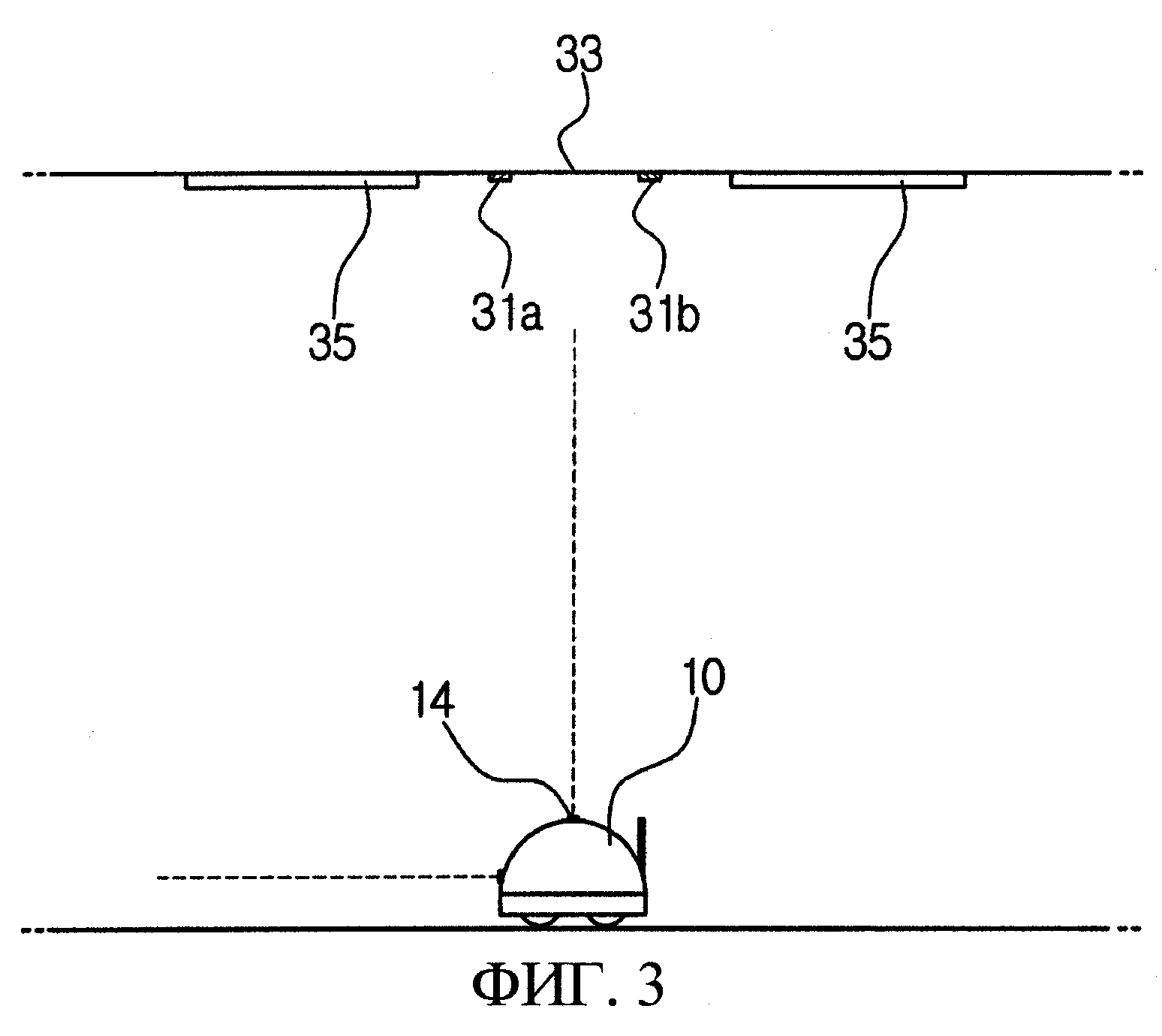
фиг.3 представляет собой изображение, показывающее робот-пылесос по фиг.1, установленный в помещении;
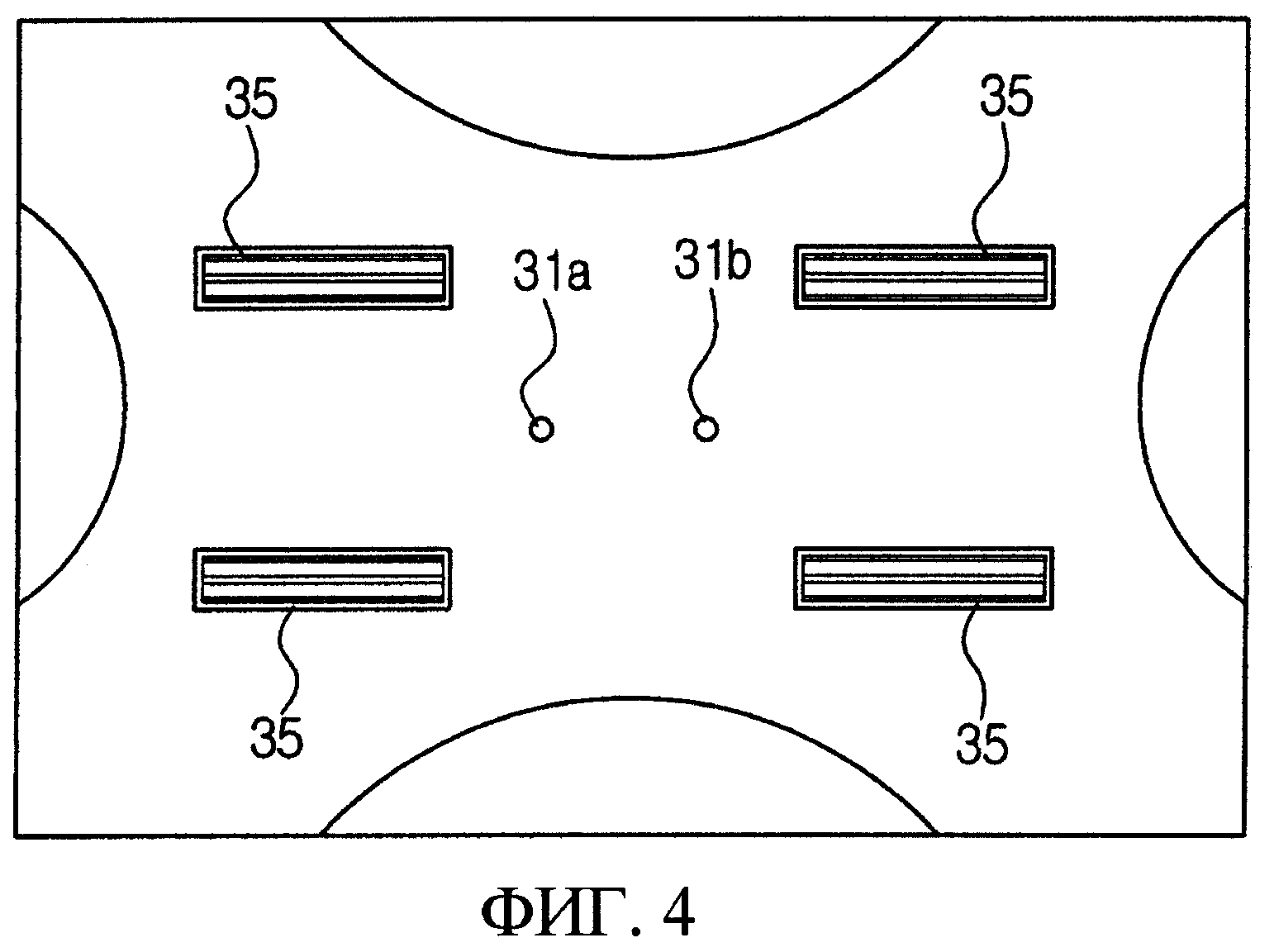
фиг.4 представляет собой вид, показывающий изображение потолка, сфотографированного верхней камерой;
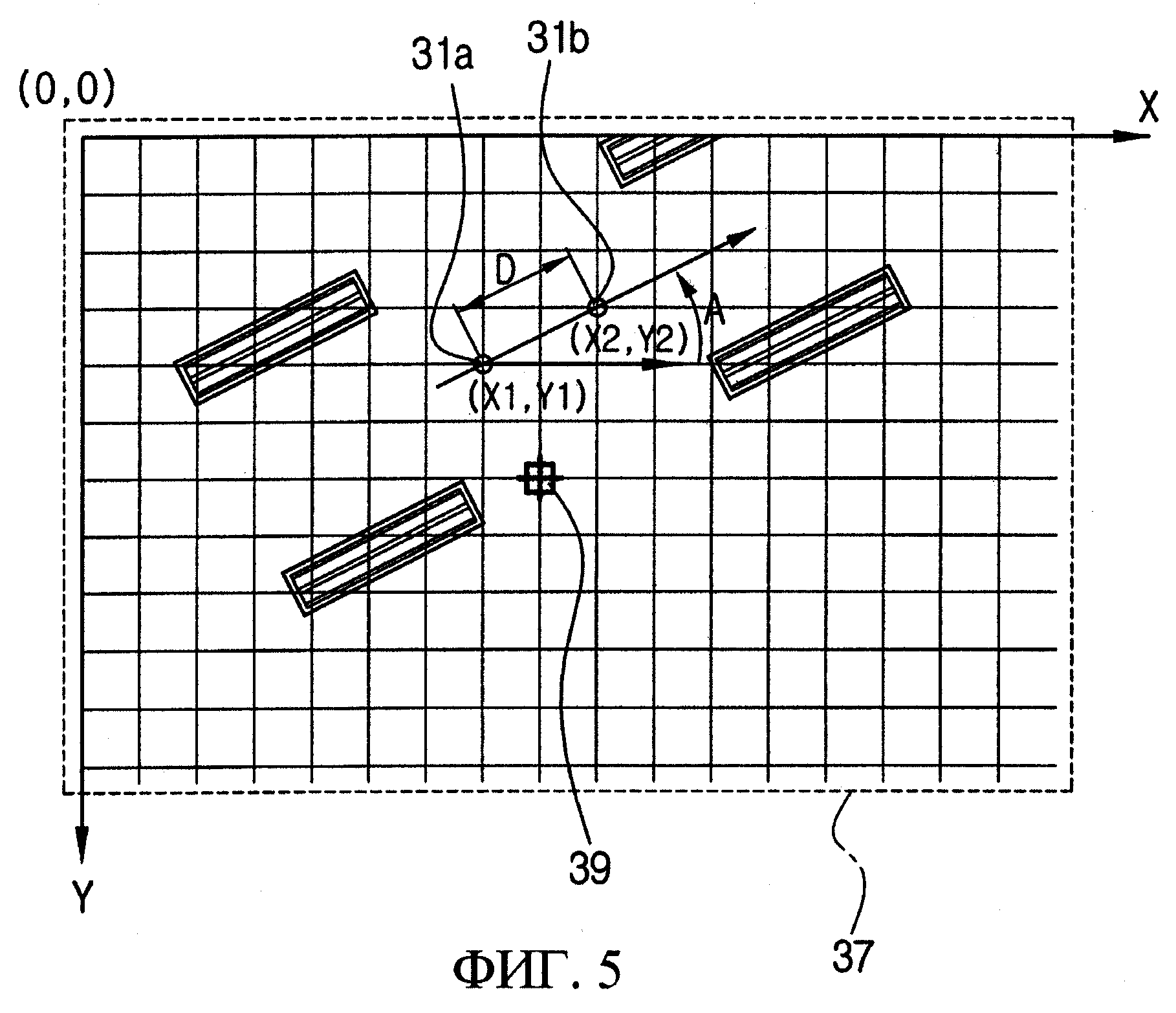
фиг.5 представляет собой изображение, иллюстрирующее процесс вычисления положения робота-пылесоса путем использования информации о положении изображения идентификационной метки по фиг.3;
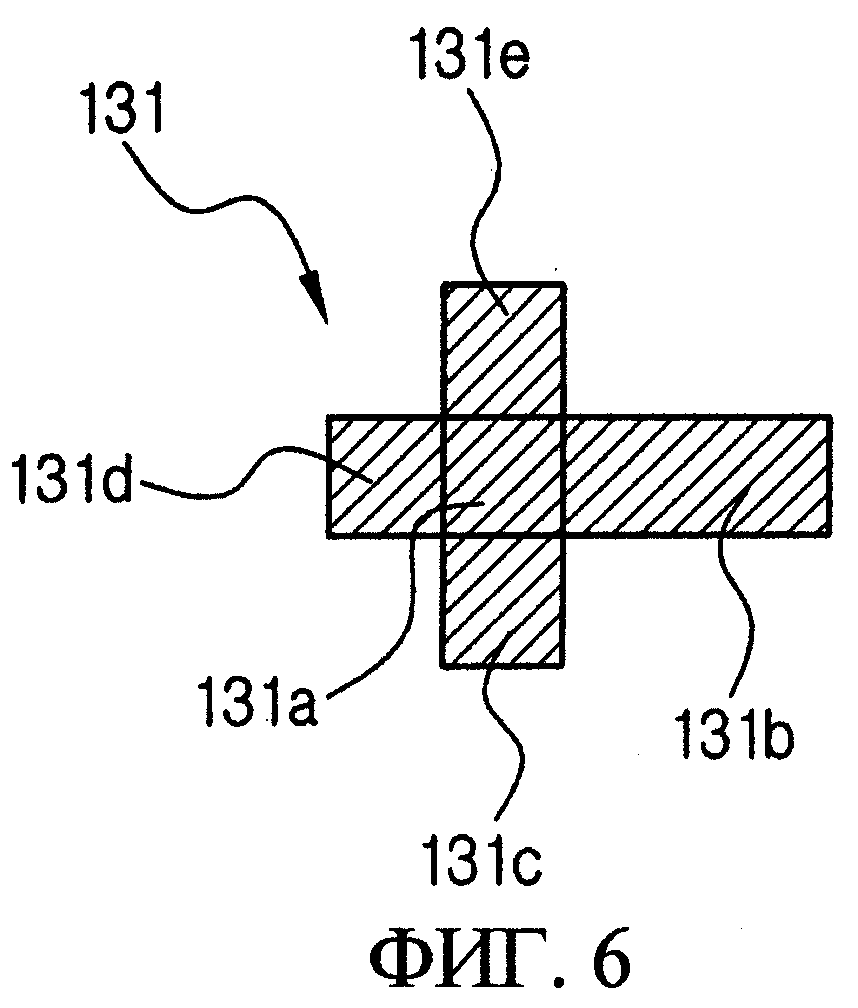
фиг.6 представляет собой вид снизу, показывающий идентификационную метку в соответствии с другим вариантом осуществления настоящего изобретения;
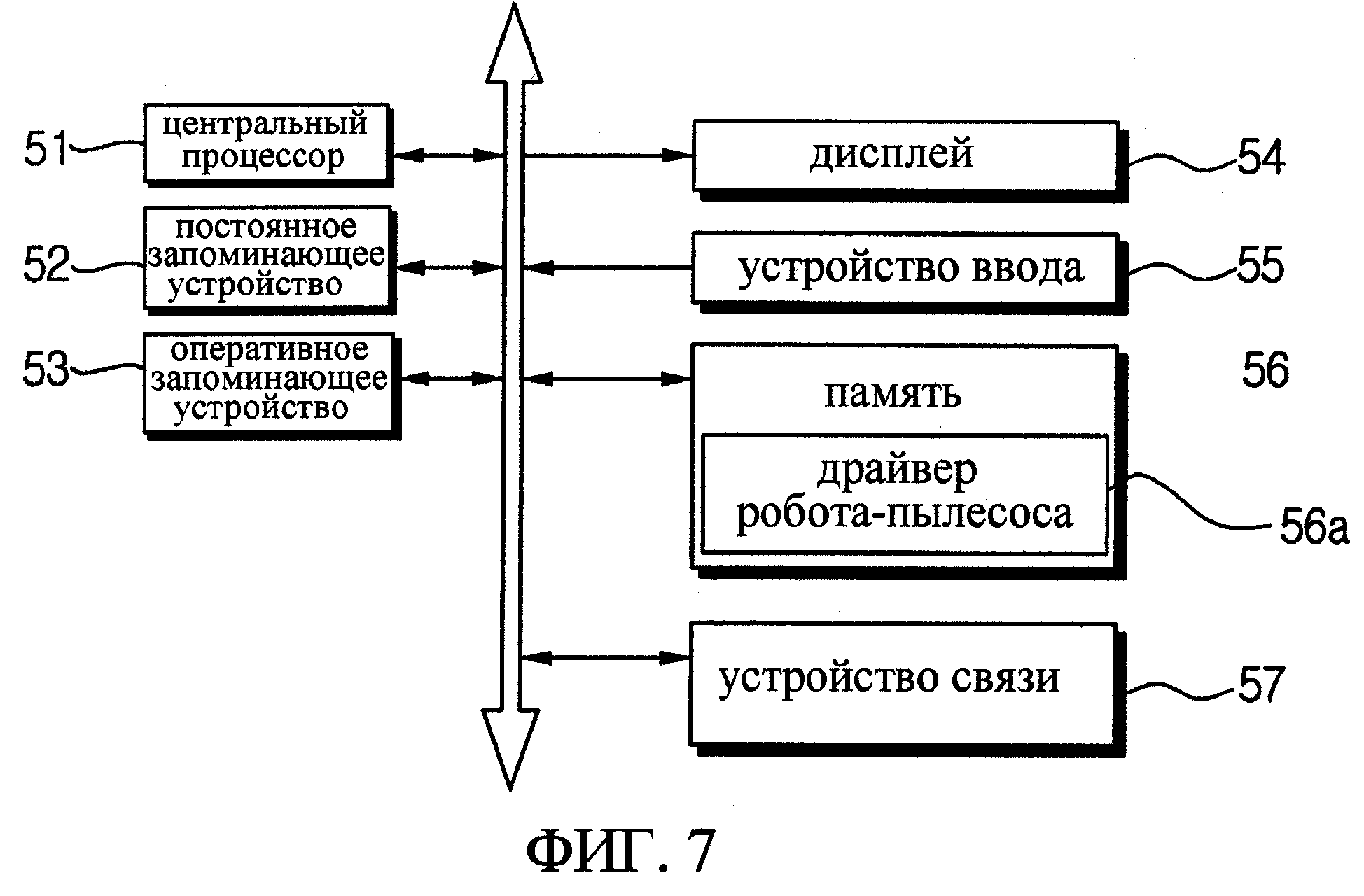
фиг.7 представляет собой блок-схему, иллюстрирующую центральное управляющее устройство по фиг.2; и
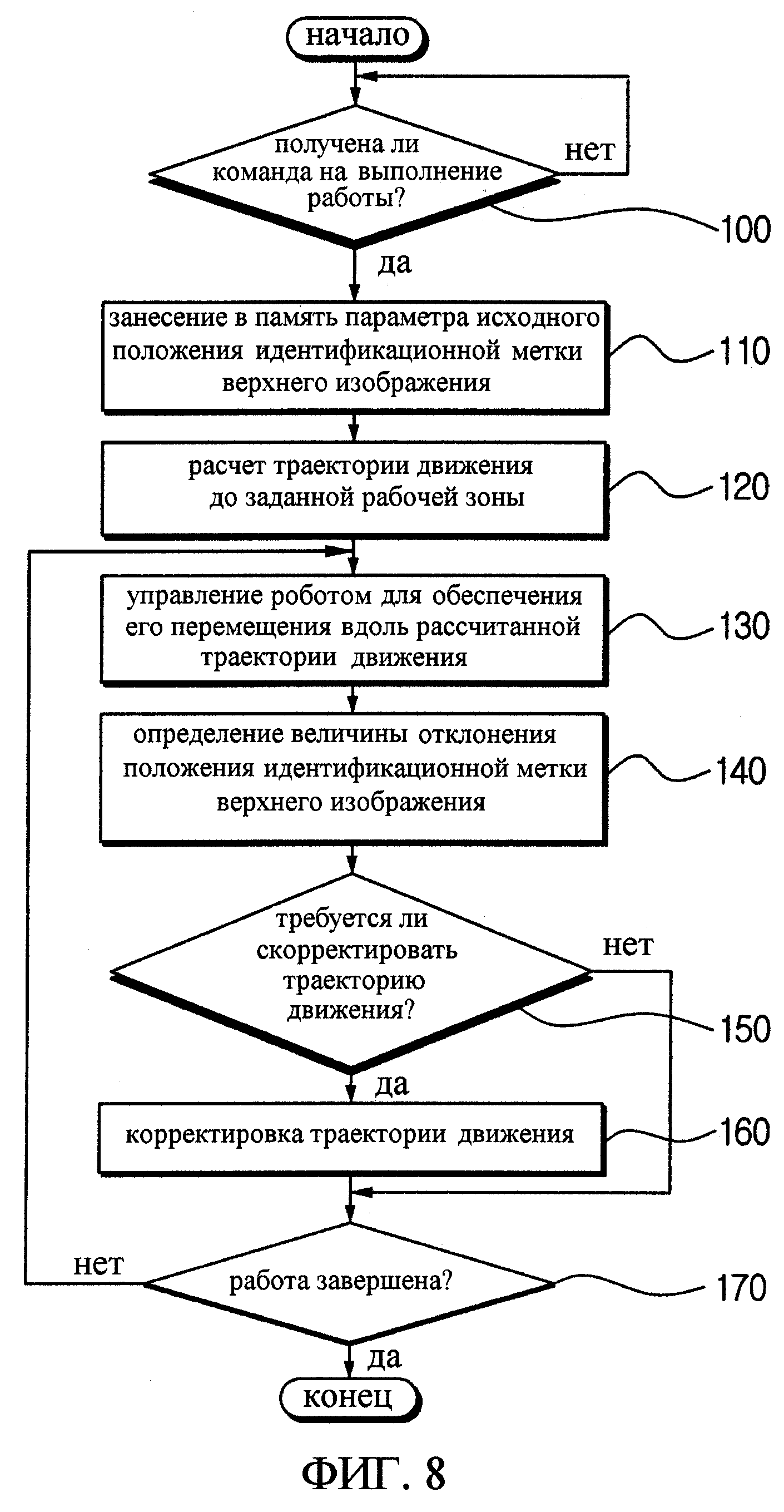
фиг.8 представляет собой блок-схему, иллюстрирующую операции чистки роботом-пылесосом согласно настоящему изобретению.
Описание предпочтительного варианта осуществления
Фиг.1 представляет собой перспективное изображение, показывающее робот-пылесос в соответствии с настоящим изобретением, от которого отделена крышка. Фиг.2 представляет собой блок-схему, иллюстрирующую систему робота-пылесоса согласно настоящему изобретению.
Как показано на фиг.1 и 2, робот-пылесос 10 содержит всасывающее устройство 11, датчик 12, переднюю камеру 13, верхнюю камеру 14, привод 15, память 16, приемопередающее устройство 17 и управляющее устройство 18. Ссылочный номер 19 обозначает аккумуляторную батарею.
Всасывающее устройство 11 расположено в корпусе 10а и обеспечивает всасывание воздуха для сбора пыли с противолежащей поверхности, подвергаемой чистке. Всасывающее устройство 11 выполняют различными способами, которые стали известными. Например, всасывающее устройство 11 содержит электродвигатель для создания всасывающей силы (непоказанный) и пылесборник для сбора пыли, которая всасывается внутрь через всасывающее отверстие или всасывающую трубу, расположенную напротив поверхности, подвергаемой чистке, за счет приведения в действие электродвигателя.
Датчик 12 включает в себя датчик 12а для обнаружения препятствия, расположенный вдоль окружной периферии корпуса 10а и предназначенный для передачи сигнала наружу и приема отраженного сигнала, и датчик 12b для определения длины перемещения, предназначенный для измерения длины перемещения робота-пылесоса 10.
Датчик 12а для обнаружения препятствий имеет элемент 12а1, предназначенный для излучения инфракрасных лучей, и светопринимающий элемент 12а2, предназначенный для приема отраженного света. Множество элементов 12а1 для излучения инфракрасных лучей и светопринимающих элементов 12а2 расположены в виде параллельных вертикальных рядов вдоль наружной окружной периферии корпуса 10а. В альтернативном варианте в датчике 12а для обнаружения препятствий может быть использован ультразвуковой датчик, предназначенный для излучения ультразвуковых волн и приема отраженных ультразвуковых волн. Датчик 12а для обнаружения препятствий обеспечивает определение расстояния до препятствия или стены.
Датчик 12b для определения длины перемещения может представлять собой датчик для обнаружения вращения, предназначенный для определения частоты вращения колес 15а-15d, выраженной в оборотах в минуту. Например, в датчике для определения частоты вращения используется кодовый датчик для определения частоты вращения электродвигателей 15е и 15f, выраженной в оборотах в минуту.
Передняя камера 13 расположена в корпусе 10а и предназначена для фотографирования объектов, находящихся впереди, и передачи сфотографированного переднего изображения управляющему устройству 18.
Верхняя камера 14 расположена в корпусе 10а и предназначена для фотографирования объектов, находящихся сверху, и передачи сфотографированного верхнего изображения управляющему устройству 18. Предпочтительно в верхней камере 14 используется сверхширокоугольный объектив типа "рыбий глаз" (непоказанный).
Сверхширокоугольный объектив типа "рыбий глаз" содержит, по меньшей мере, одну линзу, которая предназначена для получения поля зрения при фотографировании, столь же широкого, как у рыбьего глаза, например, до 180°. Сверхширокоугольный объектив типа "рыбий глаз" предназначен для того, чтобы соответствовать заданной величине угла поля зрения или допустимой величине искажения. Поскольку сверхширокоугольный объектив типа "рыбий глаз", подобный указанному выше, раскрыт в патентах Кореи №№1996-7005245, 1997-48669 и 1994-22112 и поставляется на рынок несколькими производителями объективов, дополнительное подробное описание не приводится.
Привод 15 содержит два передних колеса 15а и 15b, расположенных у обеих передних сторон корпуса 10а, два задних колеса 15с и 15d, расположенных у обеих задних сторон корпуса 10а, электродвигатели 15е и 15f, соответственно приводящие во вращение два задних колеса 15с и 15d, и синхронный ремень 15g, предназначенный для передачи движущей силы от задних колес 15с и 15d передним колесам 15а и 15b. Привод 15 обеспечивает приведение во вращение соответствующих электродвигателей 15е и 15f независимо друг от друга в направлениях по часовой стрелке/против часовой стрелки в соответствии с управляющим сигналом от управляющего устройства 18. Изменение направления движения робота-пылесоса 10 осуществляется путем приведения электродвигателей 15е и 15f во вращение с различным количеством оборотов в минуту.
Приемопередающее устройство 17 передает и принимает сигнал с помощью антенны 17а и выдает полученный сигнал управляющему устройству 18.
Управляющее устройство 18 обрабатывает сигнал, который получен посредством приемопередающего устройства 17 и управляет соответствующими компонентами робота-пылесоса 10. Робот-пылесос 10 может дополнительно содержать клавишное устройство ввода (непоказанное), расположенное в корпусе 10а и имеющее множество клавиш для управления функционированием робота-пылесоса, и в этом случае управляющее устройство 18 обрабатывает сигнал от клавиши, введенный посредством клавишного устройства ввода (непоказанного).
Управляющее устройство 18 идентифицирует текущее положение робота-пылесоса путем использования информации о положении в виде идентификационной метки 31 (см. фиг.3), появляющейся в верхнем изображении, сфотографированном верхней камерой 14. Идентификационная метка 31 образована на потолке зоны, подлежащей чистке, и предназначена для использования в способе идентификации положения. Управляющее устройство 18 управляет соответствующими компонентами робота-пылесоса 10 путем использования информации об идентифицированном положении для выполнения заданных операций.
Эталонные данные об изображении хранятся в памяти 17 для сравнения с идентификационной меткой 31 сфотографированного верхнего изображения, так что управляющее устройство 18 ищет идентификационную метку 31 на изображении, сфотографированном верхней камерой 14.
Существуют различные способы обработки изображений для распознавания идентификационной метки 31 на сфотографированном изображении. В одном примере сфотографированное изображение преобразуют в серую шкалу (шкалу яркости) и сравнивают с зоной, соединяющей точки элементов изображения, имеющих параметр, аналогичный параметру идентификационной метки. В другом примере сначала заносят в память распределение данных изображения вокруг идентификационной метки, и любая зона изображения, имеющая распределение, аналогичное занесенным в память данным, будет определена как идентификационная метка. Идентификационная метка 31 может быть выполнена с различными формами, которые облегчают определение направления движения и измерение длины перемещения робота-пылесоса 10.
На фиг.3 показано рабочее пространство, в котором образован пример идентификационной метки.
На фиг.3 показаны две идентификационные метки 31а и 31b, образованные на потолке 33 рабочего пространства. Ссылочный номер 35 обозначает люминесцентные потолочные светильники.
На фиг.4 показан пример скорректированного изображения верхней зоны, в которой образована идентификационная метка 31, на основе исходного изображения, сфотографированного верхней камерой 14, в которой использован сверхширокоугольный объектив типа "рыбий глаз". Исходное изображение, сфотографированное с помощью сверхширокоугольного объектива типа "рыбий глаз", искажено и выглядит подобно картографическому изображению на полусфере, и требуется корректировка для получения линейной формы, которая соответствовала бы реальному пространству.
Соответственно, предпочтительно, чтобы в управляющем устройстве 18 или в памяти 17 был предусмотрен процессор для корректировки изображений (непоказанный), который бы приводился в действие управляющим устройством 18.
Процессор для корректировки изображений выполняет корректировку искаженного изображения с преобразованием его из полусферической формы в линейную форму различными способами, которые стали известными. Например, в патенте Кореи №163915 раскрыт способ коррекции степени искажения путем применения противовеса, соответствующего степени искажения, вызываемого сверхширокоугольным объективом типа "рыбий глаз", для полученного изображения. Также могут быть использованы другие известные способы коррекции степени искажения.
Между тем для идентификации текущего положения робота-пылесоса 10 управляющее устройство 18 рассчитывает величину отклонения параметра положения путем сравнения текущей информации, полученной с помощью верхней камеры 14, то есть данных о координатах, относящихся к идентификационным меткам 31, наклона линии, соединяющей идентификационные метки 31, и информации, относящейся к расстоянию между идентификационными метками 31, с ранее занесенной в память информацией, полученной с помощью верхней камеры 14.
Далее приводится более подробное описание со ссылкой на фиг.5.
На фиг.5 показана полная растровая сетка 37 скорректированного изображения на основе исходного изображения, сфотографированного верхней камерой 14. Как показано, взаимно перпендикулярные оси (Х, Y) координат с началом (0,0) отсчета использованы для полной растровой сетки 37, чтобы разъяснить процесс получения значений координат и остальных параметров определенного изображения на полной растровой сетке 37. Метка, обозначенная ссылочным номером 39 на фиг.5, обозначает центральное положение верхней камеры 14 и соответствует текущему положению робота-пылесоса 10.
Как можно понять с помощью чертежей, управляющее устройство 18 рассчитывает величину отклонения параметра положения и определяет текущее положение путем сравнения координат (X1, Y1) и (X2, Y2) идентификационных меток 31а и 31b, появляющихся на изображении, сфотографированном верхней камерой 14, расстояния D между данными координатами и угла (А), который соответствует наклону линии, соединяющей идентификационные метки 31а и 31b, с ранее занесенными в память данными.
Предпочтительно идентификационные метки 31 имеют разные формы, которые можно отличить друг от друга.
Кроме того, принимая во внимание свет, исходящий от ламп, и, как правило, светлые внутренние стороны пространства, подлежащего чистке, идентификационные метки 31 выполняют черными, чтобы их можно было легко различить.
Кроме того, вместо использования двух идентификационных меток 31а, 31b может быть использована выполненная за одно целое идентификационная метка 131, которая показана на фиг.6. Выполненная за одно целое идентификационная метка 131 имеет четыре части 131b, 131с, 131d и 131е, которые указывают направления и проходят от центральной части 131а в четырех основных направлениях. Части 131b и 131d, указывающие направления, соответственно проходят от центральной части 131а в противоположных горизонтальных направлениях и имеют разную длину. Выполненная за одно целое идентификационная метка 131 позволяет управляющему устройству 18 легко получить информацию о направлении поворота и длине перемещения робота-пылесоса 10 путем сравнения фотографируемого в данный момент изображения с ранее сфотографированным изображением. Можно исключить одну из четырех частей 131b, 131с, 131d и 131е, указывающих направления.
Когда команду на выполнение работы вводят посредством беспроводной связи с помощью клавишного устройства ввода извне, управляющее устройство 18 идентифицирует текущее положение робота-пылесоса 10 путем сравнения информации о положении идентификационной метки 31, появляющейся на изображении, фотографируемом в данный момент верхней камерой 14, с ранее занесенными в память данными о положении идентификационной метки. Затем управляющее устройство 18 приводит в действие привод 15 так, чтобы обеспечить соответствие заданной траектории движения, начиная от идентифицированного текущего положения. В этот момент рабочая команда включает в себя команду на выполнение операции чистки или операции автоматического слежения посредством камеры. При перемещении вдоль заданной траектории движения управляющее устройство 18 рассчитывает ошибку перемещения путем использования длины перемещения, измеренной с помощью кодового датчика положения, и текущего положения робота-пылесоса, идентифицированного путем сравнения информации о положении идентификационной метки 31, появляющейся на изображении, фотографируемом в данный момент, с информацией о положении, ранее занесенной в память идентификационной метки. После этого управляющее устройство 18 выполняет компенсацию ошибки перемещения и управляет приводом 15 таким образом, чтобы обеспечить перемещение точно по заданной траектории движения. Кроме того, если идентификационная метка 31 не будет зафиксирована в тот момент, когда чистящее устройство обходит препятствие, управляющее устройство 18 будет временно управлять перемещением робота-пылесоса путем использования информации о длине перемещения и направлении перемещения, определенных путем вычислений на основе данных, полученных от кодового датчика.
Вышеприведенное описание относится к случаю, когда управляющее устройство 18 непосредственно выполняет операцию идентификации положения путем использования информации об изображении идентификационной метки 31, сфотографированной верхней камерой 14.
В соответствии с другим вариантом осуществления настоящего изобретения система робота-пылесоса выполняет операцию идентификации положения для робота-пылесоса с помощью внешнего устройство, так что вычислительная нагрузка, связанная с вычислениями, необходимыми для идентификации положения, снижается.
Для этого робот-пылесос 10 осуществляет беспроводную передачу информации о сфотографированном изображении внешнему устройству и работает в соответствии с управляющими сигналами, полученными от внешнего устройства. Как видно на фиг.2, устройство 40 дистанционного управления управляет работой робота-пылесоса 10 путем управления приводом робота-пылесоса посредством беспроводной связи. Устройство 40 дистанционного управления содержит ретранслятор 41 в системе беспроводной связи и центральное управляющее устройство 50.
Ретранслятор 41 в системе беспроводной связи обрабатывает сигнал, полученный с помощью беспроводной связи от робота-пылесоса 10 через посредство антенны 42, и передает этот сигнал центральному управляющему устройству 50 по проводу. Ретранслятор 41 в системе беспроводной связи передает сигнал, полученный от центрального управляющего устройства 50, роботу-пылесосу 10 с помощью беспроводной связи через посредство антенны 42.
Центральное управляющее устройство 50 выполнено с универсальной вычислительной машиной, пример которой показан на фиг.7. Как показано на фиг.7, центральное управляющее устройство 50 содержит центральный процессор (ЦП) 51, постоянное запоминающее устройство (ПЗУ) 52, оперативное запоминающее устройство (ОЗУ) 53, дисплей 54, устройство 55 ввода, запоминающее устройство 56 и устройство 57 связи.
Запоминающее устройство 56 предусмотрено с драйвером 56а робота-пылесоса, предназначенным для управления роботом-пылесосом 10 и обработки сигнала, полученного от робота-пылесоса 10. Если драйвер 56а робота-пылесоса задействован, на дисплее 54 отображается меню для настройки управления роботом-пылесосом. Драйвер 56а робота-пылесоса обрабатывает данные, выбранные в меню пользователем, и управляет роботом-пылесосом 10 в соответствии с выбором, сделанным пользователем. Меню включает в себя основное меню, обеспечивающее возможность выбора операции чистки и операции автоматического слежения, и субменю, включающее в себя список выбора заданных зон и рабочий режим.
Драйвер 56а робота-пылесоса идентифицирует текущее положение робота-пылесоса 10 таким же способом, какой описан выше, то есть путем использования верхнего изображения идентификационной метки, полученного от робота-пылесоса 10, и занесенного в память изображения идентификационной метки.
Управляющее устройство 18 робота-пылесоса 10 управляет приводом 15 в соответствии с управляющей информацией, полученной от драйвера 56а робота-пылесоса посредством ретранслятора 41 в системе беспроводной связи, и обеспечивает снижение вычислительной нагрузки, связанной с вычислениями, необходимыми для идентификации положения робота-пылесоса 10. Кроме того, во время перемещения робота-пылесоса 10 управляющее устройство 18 периодически передает сфотографированное верхнее изображение центральному управляющему устройству 50 посредством ретранслятора 41 в системе беспроводной связи.
Далее со ссылкой на фиг.8 более подробно будет описан способ управления роботом-пылесосом. Вначале определяют, получена ли команда на выполнение работы (шаг 100). Если команда на выполнение работы получена, в память заносят исходный параметр положения идентификационной метки, появляющейся в верхнем изображении, сфотографированном верхней камерой 14 (шаг 110). После этого рассчитывают параметры заданной рабочей зоны, соответствующей полученной команде на выполнение работы, или траекторию движения, вдоль которой робот-пылесос 10 будет перемещаться до заданной рабочей зоны (шаг 120). Затем осуществляют управление роботом-пылесосом 10 с обеспечением его перемещения вдоль рассчитанной траектории движения (шаг 130).
Во время перемещения робота-пылесоса 10 величину отклонения положения робота-пылесоса 10 вычисляют путем сравнения информации о положении идентификационной метки, появляющейся на верхнем изображении, полученном от верхней камеры 14, с занесенным в память параметром исходного положения (шаг 140). После этого определяют, требует ли траектория движения робота-пылесоса 10 корректировки путем анализа рассчитанной величины отклонения положения (шаг 150). Если требуется корректировка траектории движения, траекторию движения корректируют путем использования информации об идентифицированном текущем положении (шаг 160). После этого определяют, завершена ли работа (шаг 170). "Работа" означает операцию чистки, которая выполняется роботом-пылесосом при перемещении до заданной зоны и движении по определенной траектории движения. Если будет определено, что работа не завершена, то шаги 130-170 повторяют до тех пор, пока работа не будет завершена.
Как описано выше, поскольку при использовании робота-пылесоса и системы робота-пылесоса и способа управления роботом-пылесосом согласно настоящему изобретению идентификационная метка для идентификации текущего положения робота-пылесоса образована на потолке, который имеет мало изменений, идентификация положения выполняется с большей точностью, и перемещение робота-пылесоса 10 до заданной рабочей зоны и операция чистки выполняются эффективным образом.
Несмотря на то, что был описан предпочтительный вариант осуществления настоящего изобретения, специалистам в данной области техники должно быть понятно, что настоящее изобретение не следует ограничивать описанным предпочтительным вариантом осуществления, но различные изменения и модификации могут быть выполнены в рамках идеи и объема настоящего изобретения, определяемых приложенной формулой изобретения.
Реферат
Робот-пылесос и система робота-пылесоса могут быть использованы для очистки различных поверхностей и способны эффективно выполнять заданный объем работы путем более точной идентификации текущего положения робота-пылесоса. Робот-пылесос содержит привод, предназначенный для приведения в движение множества колес, камеру, расположенную в корпусе, и управляющее устройство для идентификации положения привода путем использования информации о положении, полученной из идентификационной метки на потолке рабочей зоны, которая сфотографирована камерой, и для управления приводом путем использования информации об идентифицированном положении с возможностью обеспечения соответствия заданной операции чистки. Идентификационная метка имеет множество частей, указывающих направление, которые образованы за одно целое с ней. Части, указывающие направление, образованы в азимутальном направлении от заранее заданной центральной точки идентификационной метки и имеют разную длину. В варианте выполнения робот-пылесос содержит корпус, всасывающее устройство, множество колес, привод, соединенный с колесами, датчик для обнаружения препятствий, расположенный на корпусе, датчик для определения длины перемещения, расположенный на корпусе, камеру, выполненную с возможностью фотографирования идентификационной метки, образованной на потолке зоны, подлежащей чистке, управляющее устройство, сконфигурированное с возможностью выдачи сигнала приводу и идентификации положения робота-пылесоса на основе сравнения текущей фотографии идентификационной метки и хранящейся в памяти фотографии идентификационной метки. Система робота-пылесоса включает в себя робот-пылесос, содержащий привод для приведения в движение множества колес и верхнюю камеру, расположенную в корпусе для фотографирования верхнего изображения, простирающегося перпендикулярно направлению движения робота-пылесоса, и устройство дистанционного управления, имеющее беспроводную связь с роботом-пылесосом для идентификации текущего положения робота-пылесоса путем использования изображения идентификационной метки, образованной на потолке рабочей зоны, которая сфотографирована верхней камерой. Идентификационная метка имеет множество частей, указывающих направление, которые образованы за одно целое с ней. Части, указывающие направление, образованы в азимутальном направлении от заранее заданной центральной точки идентификационной метки и имеют различные длины. Устройство дистанционного управления выполнено с возможностью управления направлением рабочего перемещения робота-пылесоса и выполнения заданной операции чистки на основе идентифицированного текущего положения робота-пылесоса. 3 н. и 13 з.п.ф-лы, 8 ил.
Комментарии