Автономное устройство для обработки поверхности - RU2593113C2
Код документа: RU2593113C2
Чертежи











Описание
Область техники, к которой относится изобретение
Данное изобретение относится к автономному устройству для обработки поверхности, такому как мобильный роботизированный пылесос, а также к приводной конструкции для такой машины.
Уровень техники
Мобильные роботы находят все более широкое распространение и применяются в таких разнообразных областях, как исследование космического пространства, стрижка газонов и чистка пола. В последнее десятилетие наблюдалось особенно быстрое развитие в области роботизированных устройств для чистки пола, в частности пылесосов, причем его главной целью является обеспечение навигации в доме пользователя автономно и беспрепятственно в процессе чистки пола. Данное изобретение будет описано в контексте роботизированного пылесоса, но оно также применимо в общем случае к любому типу мобильного роботизированного устройства, такого как роботизированные устройства для стрижки газонов.
Общим для всех мобильных роботов является потребность в системе привода. В контексте роботизированных устройств для чистки пола популярный способ заключается в обеспечении корпуса робота с колесами на каждой стороне, причем каждое колесо может приводиться в движение независимо. Следовательно, робот может перемещаться прямолинейно путем приведения обоих колес в движение в одинаковом направлении с одинаковой скоростью, или он может поворачиваться путем изменения относительного вращения колес. Приведение колес в движение в противоположном направлении друг относительно друга позволяет роботу вращаться на месте. Такая система обычно будет также включать в себя третье колесо, расположенное по направлению к задней части корпуса робота, которое действует в качестве холостого опорного ролика, пассивно катясь вдоль, в то же время обеспечивая опору для одной стороны корпуса. Значительное преимущество такой системы заключается в том, что она делает робота высокоманевренным и также предотвращает необходимость в дополнительном направляющем механизме. Примеры автономных роботизированных пылесосов, использующих такую приводную конструкцию, являются пылесосы Roomba™ фирмы "iRobot" и Trilobit™ фирмы "Electrolux".
Недостаток описанного выше мобильного робота с колесами заключается в его ограниченной способности к вскарабкиванию на предметы или даже на покрытия пола, такие как кабели или паласы.
Альтернативный способ заключается в оборудовании автономного устройства для чистки пола приводной конструкцией с гусеничной лентой, как описано в документе ЕP 1582132. Такая конструкция, как правило, улучшает захват благодаря большей контактной зоне, характерной для гусеничной ленты, и поэтому оно может лучше преодолевать препятствия, такие как ковры и кабели. Однако из-за увеличенной площади контакта приводная система робота более подвержена проскальзыванию, что является недостатком, поскольку это вводит неточности в навигационную систему робота.
Раскрытие изобретения
На фоне вышеуказанных обстоятельств, данное изобретение обеспечивает автономное устройство для чистки поверхности, содержащее шасси, имеющее приводную конструкцию и систему управления, связанную с приводной конструкцией, для того чтобы позволить управлять устройством на поверхности, подлежащей обработке, причем приводная конструкция содержит по меньшей мере один движущий блок, причем каждый движущий блок содержит зацепляющуюся с поверхностью гусеничную ленту, обмотанную вокруг ведущего шкива и ведомого шкива, причем ведущий шкив и ведомый шкив расположены таким образом, что часть ленты, находящаяся напротив пола и проходящая между ведущим и ведомым шкивами, образует наклонную поверхность для вскарабкивания вверх.
Если выразиться иным образом, данное изобретение заключается в приводной конструкции для мобильного робота, содержащей трансмиссионный блок для передачи приводного усилия от двигательного блока к приводному валу, проходящему от трансмиссионного блока вдоль оси приводного, вала, поворотный рычаг, присоединенный к трансмиссионному блоку, так чтобы он поворачивался под углом вокруг оси приводного вала, звездочку, присоединенную к приводному валу, и шкив, смонтированный на части поворотного рычага, удаленной от приводного вала, и способный вращаться вокруг оси, параллельной оси приводного вала, гусеничную ленту, обмотанную вокруг звездочки и шкива, причем звездочка и шкив расположены таким образом, что гусеничная лента образует наклонную поверхность для перемещения.
Эта наклонная поверхность для вскарабкивания, расположенная относительно соседней поверхности, подлежащей обработке, улучшает способность робота преодолевать неровности в поверхности, подлежащей обработке, а также перемещаться через поднятые препятствия, такие как, например, электрические кабели/складки или края ковровых покрытий. Кроме того, благодаря наличию части гусеничной ленты, расположенной впереди ведомого шкива, которая наклонена относительно горизонтали, поддерживается малая зона контакта, что обеспечивает преимущество маневрирования, поскольку она не страдает от той степени проскальзывания, которая наблюдалась бы, если бы значительная часть гусеничной ленты находилась в контакте с поверхностью пола. Это особенно справедливо на покрытых ковром поверхностях, где удлиненная зона контакта, характерная для известных конфигураций типа корпуса и гусеничной ленты, делает для робота затруднительным поворачиваться на месте. В отличие от этого, мобильный робот данного изобретения снабжен преимуществами вскарабкивания благодаря наличию наклонной поверхности для вскарабкивания, образуемой гусеничной лентой, и преимуществами маневренности в результате малой зоны контакта, таким же образом, как простое колесо.
Для приведения в движение движущего блока может быть предусмотрен двигатель, который в одном варианте осуществления данного изобретения приводит в движение ведущий шкив в ответ на команды от системы управления. Однако следует понимать, что ведомый шкив может также являться приводным шкивом.
Для простоты и снижения стоимости двигатель представляет собой электродвигатель, а более конкретно - бесщеточный электродвигатель постоянного тока. Возможны приводы с другими двигателями, такие как привод с гидравлическим двигателем, хотя при более высокой стоимости и большем весе.
Хотя ведущее колесо может приводиться в движение непосредственно двигателем, в примере варианта осуществления данного изобретения предусмотрен трансмиссионный блок для передачи движущего усилия от двигателя к ведущему шкиву. Это позволяет снижать скорость вращения двигателя с помощью редуктора, в то же время увеличивая крутящий момент и обеспечивая точность регулирования.
Трансмиссия также обеспечивает монтажную часть, с помощью которой движущий блок можно монтировать к шасси устройства, в то же время обеспечивая неподвижную точку, на которую соединительный элемент можно поворотным образом монтировать на одном конце и иметь второй конец, на котором монтируется ведомый шкив. Ведомый шкив может, следовательно, поворачиваться под углом вокруг приводной оси ведущего шкива.
При перемещении по шероховатым поверхностям, например, по ковру с толстым ворсом, требуется улучшенное зацепление с поверхностью. Таким образом, в варианте реализации приводной конструкции согласно данному изобретению обеспечено сдвигающее средство между корпусом трансмиссии и соединительным элементом, которое прижимает ведомое колесо к поверхности, подлежащей обработке. Таким образом, если шасси поднимается из-за контакта с препятствием или неровностью поверхности, ведомый шкив будет прижиматься для вхождения в контакт с поверхностью, тем самым поддерживая сильное зацепление.
Чтобы предотвратить столкновение предметов с гусеничными лентами, соединительный элемент может включать в себя защитный элемент, который по меньшей мере частично заполняет объем, ограниченный ведущим шкивом, ведомым шкивом и внутренними поверхностями гусеничной ленты. Это снижает вероятность того, что предметы, такие как осколок или камень, попадут в зазор между гусеничной лентой и шкивами, тем самым увеличивая надежность движущих блоков.
Еще одно улучшение тягового усилия обеспечено конструкцией ведомого шкива. Ведомый шкив может иметь ободовую часть рядом с гусеничной ленной и имеющую больший диаметр, чем поверхность ведомого шкива, зацепляющаяся с гусеничной лентой. Опционально ободовая часть может проходить к тому же самому радиальному положению, что и наружная поверхность гусеничной ленты и может быть снабжена гладким или зазубренным профилем. В этом варианте осуществления данного изобретения, поскольку ободовая часть проходит до радиуса, сравнимого в радиусом гусеничной ленты, в обстоятельствах, в которых робот перемещается по мягкой поверхности, такой как палас или ковер, гусеничная лента будет стремиться утопать в ворс ковра, в результате чего зазубренный край ободовой части будет стремиться зацепляться с ковром и обеспечивать роботу увеличенное сцепление с поверхностью. Однако на твердых поверхностях только гусеничная лента будет контактировать с поверхностью пола, что будет улучшать способность робота к маневрированию.
Хотя данное изобретение применяется к мобильным роботам и автономным устройствам для обработки пола, оно имеет специальное применение в роботизированных пылесосах, содержащих генератор воздушного потока для генерации потока воздуха между входным отверстием для грязного воздуха и выходным отверстием для чистого воздуха и отделительное устройство, расположенный в канале для воздушного потока между входным отверстием для грязного воздуха и выходным отверстием для чистого воздуха, с тем чтобы удалять грязь из воздушного потока.
Краткое описание чертежей
Для более легкого понимания данного изобретения ссылка будет сделана теперь, только с помощью примера, на прилагаемые чертежи.
На фиг. 1 дан вид в перспективе спереди мобильного робота, выполненного в соответствии с вариантом осуществления данного изобретения.
На фиг. 2 дан вид сзади мобильного робота, изображенного на фиг. 1.
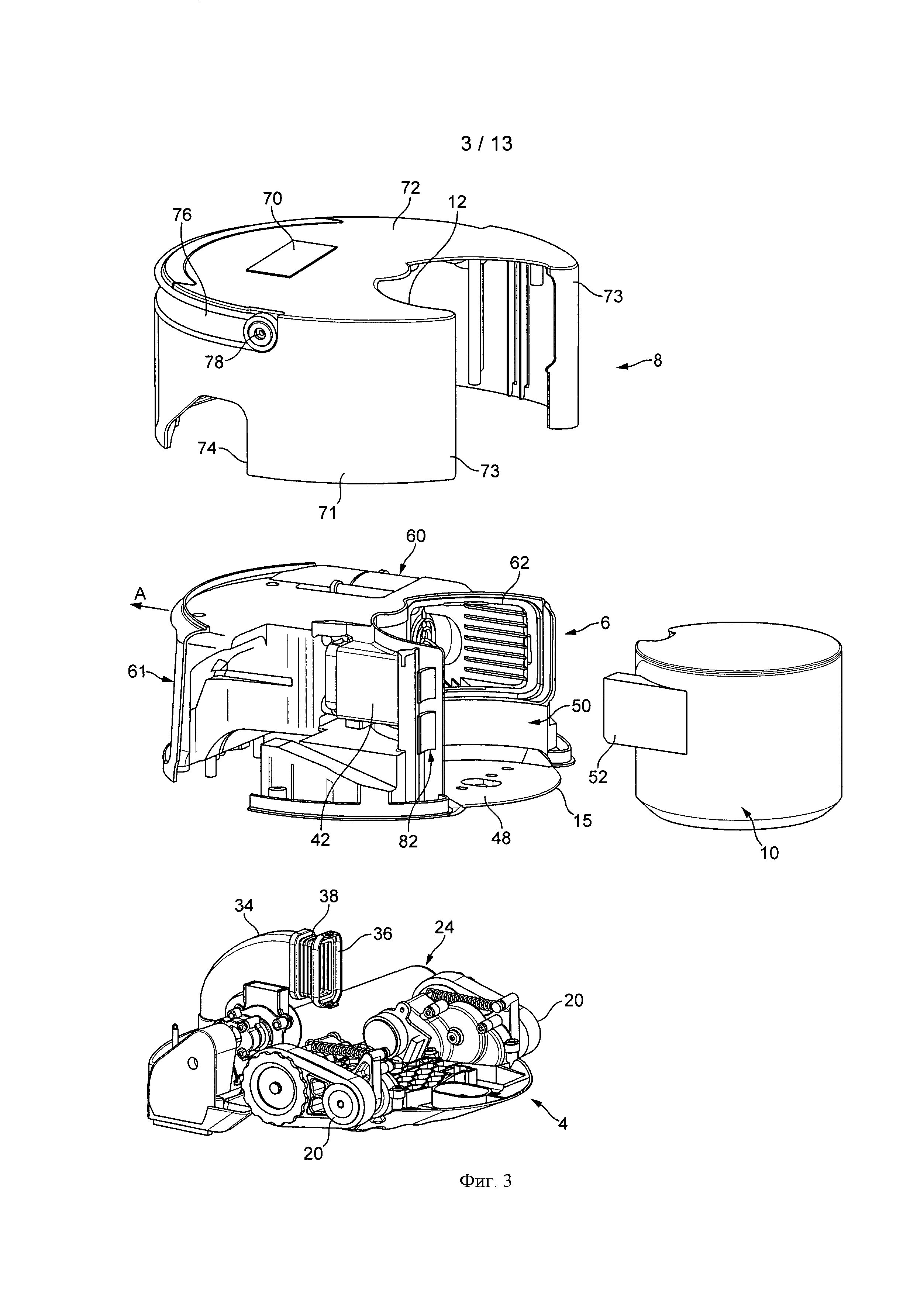
На фиг. 3 дан вид в перспективе в разобранном состоянии мобильного робота данного изобретения, показывающий его основные блоки.
На фиг. 4 дан вид в перспективе спереди шасси мобильного робота.
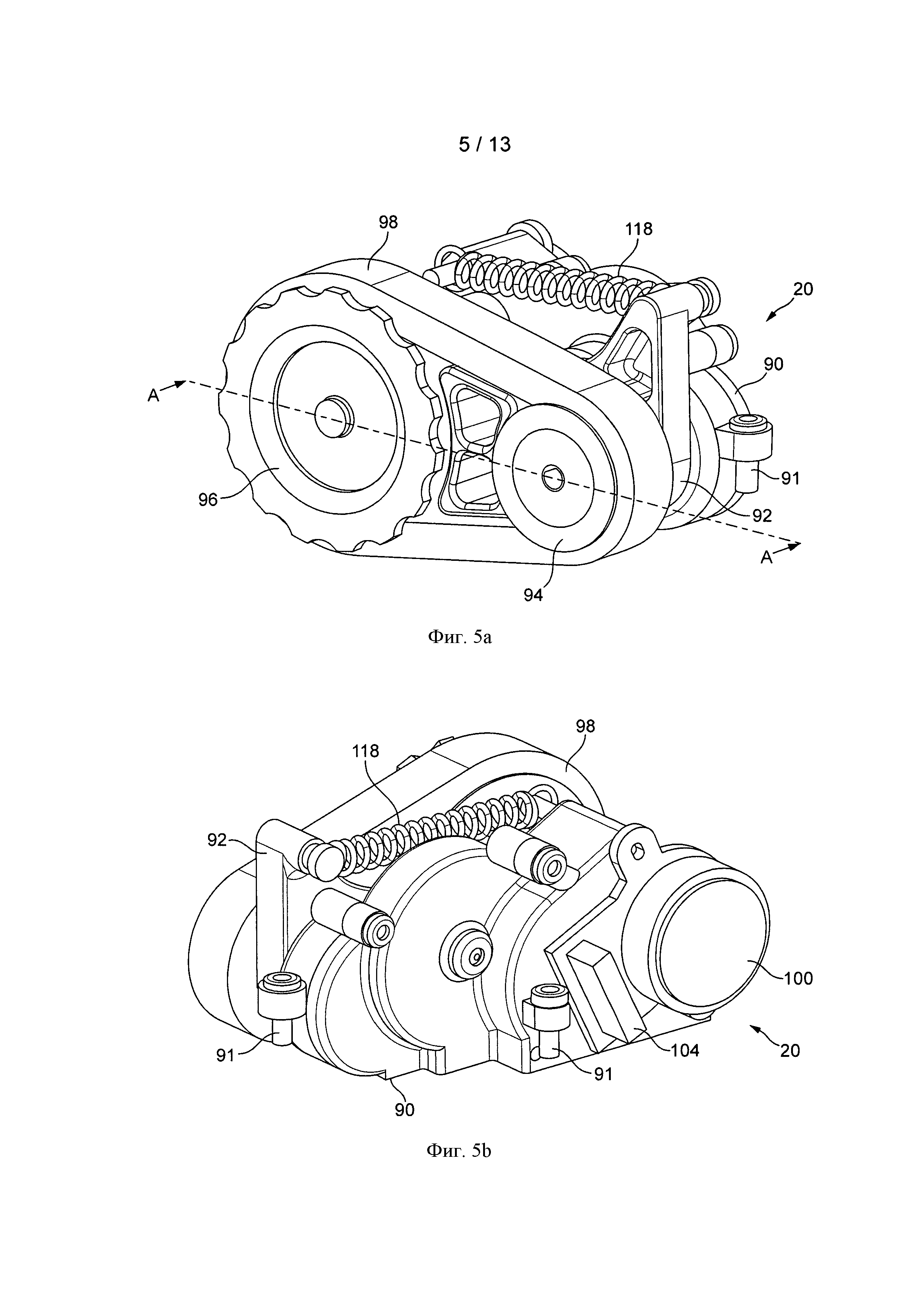
На фиг. 5а и 5b даны виды в перспективе с каждой боковой стороны движущего блока мобильного робота.
На фиг. 6 дан вид сбоку движущего блока, изображенного на фиг. 5а и 5b, и показана его ориентация относительно поверхности.
На фиг. 7 дан вид в разрезе движущего блока, изображенного на фиг. 6, выполненном вдоль линии А-А.
На фиг. 8 дан вид в перспективе в разобранном состоянии движущего блока, изображенного на фиг. 5а, 5b и 6.
На фиг. 9 дан вид сбоку движущего блока, изображенного на фиг. 6, но показанного в трех положениях поворотного рычага.
На фиг. 10 дан вид спереди шасси мобильного робота.
На фиг. 11 дан вид сзади шасси мобильного робота.
На фиг. 12 дан вид снизу основного корпуса мобильного робота. На фиг. 13а, 13b, 13с и 13d даны схематические виды робота в различных условиях столкновения с препятствием.
На фиг. 14 изображена блок-схема системы управления мобильного робота.
Осуществление изобретения
Со ссылкой на фиг. 1, 2, 3, 4 и 5, автономное устройство для обработки поверхности в виде роботизированного пылесоса 2 (называемого далее «роботом») содержит основной корпус, имеющий четыре главных блока: шасси (или опорную плиту) 4, корпус 6, который опирается на шасси 4, по существу круглую наружную крышку 8, которая может монтироваться на шасси 4 и обеспечивает роботу 2 по существу круглый профиль, и отделительное устройство 10, которое опирается на переднюю часть корпуса 6 и которое выступает через ответный по форме вырез 12 наружной крышки 8.
Для целей данного технического описания термины «передний» и «задний» в контексте робота будут использоваться в смысле его направлений перемещения вперед и назад во время работы, причем отделительное устройство 10 расположено спереди робота. Аналогично этому, термины «правый» и «левый» будут использоваться в отношении направления перемещения робота вперед. Как будет понятно из фиг. 1, основной корпус робота 2 имеет общую форму сравнительно короткого круглого цилиндра, в основном по причинам маневренности, и таким образом имеет ось «С» цилиндра, которая проходит по существу вертикально относительно поверхности, на которой перемещается робот. Соответственно, ось «С» цилиндра проходит по существу перпендикулярно к продольной оси «L», которая ориентирована в продольном направлении робота 2 и таким образом проходит через центр отделительного устройства 10. Диаметр основного корпуса предпочтительно составляет от 200 мм до 300 мм, а более предпочтительно от 220 мм до 250 мм. Наиболее предпочтительно основной корпус имеет диаметр 230 мм, который, как было обнаружено, является особенно эффективным компромиссом между маневренностью и эффективностью очистки.
Шасси 4 поддерживает несколько компонентов робота 2 и предпочтительно изготовлено из высокопрочного, отлитого под давлением пластикового материала, такого как АБС (сополимера акрилонитрила бутадиена и стирола), хотя он мог бы также быть изготовлен из подходящих металлов, таких как алюминий или сталь, или композиционных материалов, таких как композиционный материал из углеродного волокна. Как будет объяснено, главное назначение шасси 4 - служить в качестве платформы для привода и поддерживать очищающее устройство для чистки поверхности, по которой робот перемещается.
Со ссылкой на фиг. 3 и 4, передняя часть 14 шасси 4 является относительно плоской в форме лотка и образует изогнутый нос 15, который образует переднюю часть робота 2. Каждая боковая сторона передней части 14 шасси имеет углубление 16, 18, причем в эти углубления может устанавливаться соответствующий движущий блок 20. Отметим, что на фиг. 2 и 3 показано шасси 4 с прикрепленными к нему движущими блоками 20, а на фиг. 4 показано шасси 4 без прикрепленных к нему движущих блоков 20.
Два движущих блока 20 расположены на противоположных боковых сторонах шасси 4 и управляются независимо, чтобы позволить приводить робот в движение в направлениях вперед и назад, следовать изогнутой траектории влево или вправо или поворачиваться на месте в любом направлении, в зависимости от скорости и направления вращения движущих блоков 20. Такая конструкция иногда известна под названием дифференциального привода, и подробности движущих блоков 20 будут описаны более полно ниже в настоящем техническом описании.
Относительно узкая передняя часть 14 шасси 4 расширяется к задней части 22, которая включает в себя чистящую головку 24, имеющую по существу цилиндрическую форму и проходящую поперечно относительно его продольной оси «L» через по существу всю ширину шасси 4.
Со ссылкой также на фиг. 2, которая показывает нижнюю сторону робота 2, очищающая головка 24 образует прямоугольный всасывающий проем 26, который находится напротив опорной поверхности и в который засасывается грязь и мусор, когда робот 2 работает. Удлиненный щеточный стержень 28 содержится внутри чистящей головки 24 и приводится в движение электродвигателем 30 через редукторную конструкцию 32 из зубчатого колеса и ремня традиционным образом, хотя могут быть также предусмотрены другие конфигурации привода, такие как чисто зубчатая передача.
Нижняя сторона шасси 4 имеет удлиненную секцию 25 опорной плиты, проходящую вперед от всасывающего проема, образуя наклонный наконечник на ее переднем конце. Множество каналов 33 (только два из которых обозначены для краткости) на опорной плите обеспечивают проходы для грязного воздуха, засасываемого к всасывающему проему 26. Нижняя сторона шасси 4 также поддерживает множество (четыре в изображенном варианте осуществления данного изобретения) пассивных колес или роликов 31, которые обеспечивают дополнительные опорные точки для шасси 4, когда оно находится в покое на поверхности пола или перемещается по поверхности пола. Следует отметить, что ролики 31 поддерживают шасси таким образом, что его нижняя сторона находится в параллельной ориентации относительно поверхности пола. Кроме того, хотя колеса или ролики являются предпочтительными, они могли бы быть также выполнены в виде твердых опорных точек, таких как салазки или полозья.
В этом варианте осуществления данного изобретения чистящая головка 24 и шасси 4 представляют собой единую пластиковую отливку, таким образом, чистящая головка 24 выполнена неразъемной с шасси 4. Однако это не обязательно должно быть так, и эти два компонента могли бы быть отдельными, причем чистящая головка 24 соответствующим образом прикреплена к шасси 4, например, с помощью винтов или подходящего способа соединения, как было бы ясно специалисту в данной области техники.
Чистящая головка 24 имеет первую и вторую торцевые поверхности 27, 29, которые проходят к кромке шасси 4 и которые выровнены относительно крышки 8 робота. Если смотреть в горизонтальной плоскости или в плане, как показано на фиг. 2 и 3, можно видеть, что торцевые поверхности 27, 29 чистящей головки являются плоскими и проходят по касательной (обозначенной направлением «Т») к крышке 8 в диаметрально противоположных точках вдоль поперечной оси «X» робота 2. Преимущество этого заключается в том, что чистящая головка 24 способна перемещаться очень близко к стенам комнаты, когда робот перемещается в режиме «следования вдоль стены», и тем самым способен чистить до самой стены. Кроме того, поскольку торцевые поверхности 27, 29 чистящей головки 24 проходят по касательной к обеим боковым сторонам робота 2, он способен чистить до самой стены, независимо от того, находится ли стена справа или слева от робота 2. Следует отметить также, что преимущественная способность очистки до края увеличивается тем, что движущие блоки 20 расположены внутри крышки 8 и по существу на поперечной оси «X», что означает, что робот может маневрировать таким образом, что крышка и, следовательно, также торцевые поверхности 27, 29 чистящей головки 24 находятся почти в контакте со стеной во время операции следования вдоль стены.
Грязь, засасываемая во всасывающий проем 26 во время операции чистки, выходит из чистящей головки 24 через канал 34, который проходит вверх от чистящей головки 24 и изгибается к передней части шасси 4 вдоль дуги приблизительно 90° до тех пор, пока она не окажется напротив переднего направления робота. Канал 34 заканчивается в прямоугольной горловине 36, имеющей гибкую гофрированную конструкцию 36, выполненную такой формы, чтобы она входила в зацепление с ответным по форме каналом 42, предусмотренным на корпусе 6.
Канал 42 обеспечен на передней части 46 корпуса 6 и открыт в направленную вперед по существу полуцилиндрическую выемку 50, имеющую по существу круглую опорную площадку 48. Выемка 50 и площадка 48 обеспечивают установочную часть, в которую при использовании устанавливается отделительное устройство 10 и из которой его можно извлекать для целей опорожнения.
Следует отметить, что в этом варианте осуществления данного изобретения отделительное устройство 10 состоит из циклонного сепаратора, такого как описанный в документе WO 2008/009886, содержание которого включено в настоящий документ путем ссылки. Конструкция такого отделительного устройства хорошо известна и не будет описана более подробно здесь, за исключением того, что отделительное устройство может быть разъемным образом прикреплено к корпусу 6 с помощью подходящего механизма, такого как быстроразъемное крепежное средство, чтобы позволить опорожнять устройство 10, когда оно наполнится. Природа отделительного устройства 10 не является главной для данного изобретения, и циклонное отделительное устройство может вместо этого отделять грязь от воздушного потока другими средствами, которые известны в данной области техники, например, фильтрующей мембраной, пористым коробчатым фильтром или другим видом отделительного устройства. Для вариантов реализации устройства согласно данному изобретению, которые не являются пылесосами, корпус может вмещать в себя оборудование, которое соответствует задаче, выполняемой машиной. К примеру, для роботизированной полировочной машины основной корпус может вмещать бак для хранения жидкого воска.
Когда отделительное устройство 10 вставлено в установочную часть 50, входное отверстие 52 для грязного воздуха отделительного устройства 10 вставляется в канал 42, а другой конец канала 42 может присоединяться к горловине 36 канала 34 щеточного стержня, так что канал 42 передает грязный воздух от чистящей головки 24 к отделительному устройству 10. Гофрированный рукав 38 обеспечивает горловине 36 канала 34 степень упругости, так чтобы он мог сопрягаться герметично с входным отверстием 52 для грязного воздуха отделительного устройства 10, несмотря на некоторое угловое отклонение. Хотя канал 34 описан здесь как гофрированный рукав, канал 34 мог бы быть снабжен альтернативным упругим уплотнением, таким как гибкое резиновое манжетное уплотнение, для соединения с входным отверстием 52 для грязного воздуха.
Грязный воздух засасывается через отделительное устройство 10 с помощью генератора воздушного потока, который в этом варианте осуществления данного изобретения представляет собой электрически питаемый блок электродвигателя и вентилятора (не показан), который расположен в корпусе 60 для двигателя, расположенном на левой стороне корпуса 6. Корпус 60 для двигателя включает в себя наклонную входную горловину 62, которая открыта на имеющей цилиндрическую форму стенке установочной части 50, чтобы тем самым соответствовать цилиндрической кривизне отделительного устройства 10. Хотя это не видно на фиг. 4, отделительное устройство 10 включает в себя выходное отверстие для чистого воздуха, которое точно совпадает с входной горловиной 62, когда отделительное устройство 10 вставлено в установочную часть 50. При использовании засасывающий двигатель может регулироваться для создания низкого давления в зоне входной горловины 62 двигателя, тем самым засасывая грязный воздух вдоль прохода воздушного потока из засасывающего проема 26 чистящей головки 24, через канал 34 и канал 42 и через отделительное устройство 10 от входного отверстия 52 для грязного воздуха к выходному отверстию для чистого воздуха. Чистый воздух затем проходит через корпус 60 для двигателя и выбрасывается из задней стороны робота 2 через снабженное фильтром выходное отверстие 61 для чистого воздуха.
Крышка 8 показана отделенной от корпуса 6 на фиг. 3 и прикрепленной к нему на фиг. 1. Поскольку шасси 4 и корпус 6 поддерживают множество функциональных компонентов робота, крышка 8 обеспечивает наружную оболочку, которая служит в основном в качестве защитного кожуха и для поддержки пользовательского управляющего интерфейса 70.
Крышка 8 содержит по существу цилиндрическую боковую стенку 71 и плоскую верхнюю поверхность 72, которая обеспечивает по существу круглый профиль, соответствующий профилю в плане корпуса 6, за исключением частично кольцевого выреза 12, выполненного такой формы, чтобы она дополняла форму установочной части 50 и цилиндрического отделительного устройства 10. Кроме того, можно видеть, что плоская верхняя поверхность 72 крышки 8 расположена в одной плоскости с верхней поверхностью 10а отделительного устройства 10, которое, следовательно, располагается заподлицо с крышкой 8, когда она установлена на основном корпусе.
Как можно особенно ясно видеть на фиг. 1 и 3, частично круглый вырез 12 крышки 8 и полуцилиндрическое углубление 50 в корпусе 6 обеспечивают установочной части подковообразный отсек, образующий два выступающих носика или кронштейна 73, которые обрамляют каждую боковую сторону отделительного устройства 10 и оставляют между ними приблизительно от 5% до 40% и предпочтительно 20% устройства 10, выступающего из передней части установочной части 50. Следовательно, часть отделительного устройства 10 остается открытой, даже когда крышка 8 находится на месте на основном корпусе робота 2, что позволяет пользователю легко осуществлять доступ к отделительному устройству 10 для целей опорожнения.
Противоположные части боковой стенки 71 включают в себя дугообразное углубление 74 (только одно показано на фиг. 3), которое вставляется над соответствующим торцом 27, 29 чистящей головки 24, когда крышка 8 присоединена к корпусу 6. Как видно на фиг. 1, существует зазор между торцами чистящей головки 24 и соответствующими арками 74, чтобы позволить относительное перемещение между ними в случае столкновения с предметом.
На верхней кромке боковой стенки 71 крышка 8 включает в себя полукруглую рукоятку 76 для ношения, которая может поворачиваться вокруг двух диаметрально противоположных выступов 78 между первым утопленным положением, в котором рукоятка 76 входит в ответную по форме выемку 80 на верхней периферийной кромке крышки 8, и выдвинутым положением, в котором она выступает вверх (показанным штриховой линией на фиг. 1). В утопленном положении рукоятка сохраняет «чистый» круглый профиль крышки 8 и не создает препятствий использованию во время нормальной работы робота 2. Кроме того, в этом положении рукоятка служит для блокировки задней дверцы фильтра (не показана) робота в закрытом положении, которое предотвращает случайное извлечение дверцы фильтра, когда робот 2 работает.
При работе робот 2 способен перемещаться самостоятельно по окружающему его пространству автономно, получая питание от аккумуляторной батареи (не показана). Для достижения этого робот 2 имеет соответствующее средство управления, которое связано с аккумуляторной батареей, причем движущие блоки 20 и соответствующий сенсорный блок 82 содержат, например, инфракрасные и ультразвуковые передатчики и приемники на передних левой и правой сторонах корпуса 6. Сенсорный блок 82 обеспечивает средство управления информацией, указывающей на расстояние робота от различных особенностей (предметов) в окружающем пространстве и размер и форму особенностей. Дополнительно средство управления связано с двигателем засасывающего вентилятора и двигателем щеточного стержня, чтобы приводить в движение и управлять этими компонентами соответствующим образом. Средство управления, следовательно, может использоваться для управления движущими блоками 20, чтобы обеспечить навигацию робота 2 по комнате, которую необходимо очистить. Следует отметить, что конкретный способ управления и навигации роботизированного пылесоса не существенен для данного изобретения, и что несколько таких способов управления известны в данной области техники. К примеру, один конкретный способ управления описан более подробно в документе WO 00/38025, в навигационной системе которого используется аппарат обнаружения света. Это позволяет пылесосу определять его местонахождения в комнате путем обнаружения, когда уровни света, измеренные датчиком света, являются такими же или по существу такими же, что и уровни света, предварительно измеренные датчиком света.
После описания шасси 4, корпуса 6 и крышки 8 движущие блоки 20 будут теперь описаны более подробно со ссылкой на фиг. 5-9, на которых приведены различные виды в перспективе, в разрезе и в разобранном состоянии одного движущего блока 20 для ясности.
В обзоре движущий блок 20 содержит корпус 90 трансмиссии, соединительный элемент 92 или «поворотный рычаг», первый и второй ременные шкивы 94, 96 и гусеничную ленту или непрерывный ремень 98, который обмотан вокруг ременных шкивов 94, 96.
Корпус 90 трансмиссии вмещает систему зубчатой передачи, которая проходит между входным модулем 100 приводного двигателя, смонтированным на внутренней стороне одного конца корпуса 90 трансмиссии и выходным приводным валом 102, который выступает из приводной стороны корпуса 90 трансмиссии, к которому присоединен модуль 100 двигателя. Модуль 100 двигателя в этом варианте осуществления данного изобретения представляет собой бесщеточный электродвигатель постоянного тока, поскольку такой двигатель является надежным и эффективным, хотя это не исключает возможности использования других типов двигателей, например, коллекторных двигателей постоянного тока, шаговых электродвигателей или даже гидравлических приводов. Как упоминалось, модуль 100 двигателя связан со средством управления для приема сигналов мощности и управляющих сигналов и снабжен встроенным электрическим разъемом 104 для этой цели. Система зубчатой передачи в этом варианте осуществления данного изобретения представляет собой конструкцию зубчатых колес, которая понижает скорость модуля 100 двигателя, в то же время увеличивая имеющийся крутящий момент, поскольку такая система является надежной, компактной и имеет малый вес. Однако другие конструкции передач предусматриваются в контексте данного изобретения, такие как конструкция ременной или гидравлической трансмиссии.
Движущий блок 20, таким образом, объединяет функции привода, редукторной передачи и зацепления с полом в автономный и независимо приводимый в движение блок и легко присоединяется к шасси 4 с помощью множества крепежных элементов 91 (четыре крепежных элемента в этом варианте осуществления данного изобретения), например, винтов или болтов, которые ввинчиваются в соответствующие монтажные приливы 93, образованные вокруг углубления шасси 4.
Движущий блок 20 может присоединяться к шасси, так чтобы первый ременный шкив 94 находился в ведущем положении, когда робот 2 перемещается вперед. В этом варианте осуществления данного изобретения ведущий шкив 94 является приводным колесом и включает в себя центральное сквозное отверстие 104, которое может надеваться на приводной вал 102 с помощью прессовой посадки. Ведущий шкив 94 можно также называть звездочкой, поскольку он является приводным шкивом в паре шкивов. Чтобы улучшить передачу приводного усилия от приводного вала 102 к ведущему шкиву 94, центральное внутреннее отверстие 104 ременного шкива может иметь внутреннюю шпонку для сопряжения с соответствующей внешней шпонкой на приводном валу. Альтернативные способы крепления ременного шкива к валу также предусмотрены, такие как частично круглый зажим, прикрепленный к валу.
Поворотный рычаг 92 включает в себя ведущий конец, который прикрепляется к корпусу 90 трансмиссии между ним и ведущим шкивом 94 и смонтирован таким образом, чтобы он поворачивался вокруг приводного вала 102. Втулка 106, расположенная в монтажном отверстии 108 поворотного рычага 92, надевается на выступающую наружу центрирующую цапфу 110 корпуса 90 трансмиссии, через который проходит приводной вал 102. Втулка 106, таким образом, обеспечивает опорную поверхность в промежутке между направляющей цапфой 110 и поворотным рычагом 92, чтобы позволить поворотному рычагу 92 поворачиваться плавно и предотвратить перекос относительно корпуса 90 трансмиссии. Втулка 106 изготовлена предпочтительно из подходящего конструкционного пластика, такого как полиамид, который обеспечивает требуемую поверхность с низким трением и в то же время высокую прочность. Однако втулка 106 может также изготавливаться из металла, такого как алюминий, сталь или их сплавы, что также обеспечивало бы необходимые характеристики трения и прочности.
Как показано на видах в сборе, поворотный рычаг 92 смонтирован на направляющей цапфе 110, и ведущий шкив 94 прикрепляется к приводному валу 102 снаружи ведущего конца поворотного рычага 92. Поворотная цапфа 112 вставлена прессовой посадкой во внутреннее отверстие, расположенное на противоположном или «ведомом» конце поворотного рычага 92 и образует монтажный вал для заднего ременного шкива 96, или «ведомого шкива», вдоль оси вращения, параллельной оси приводного вала 102. Ведомый шкив 96 включает в себя центральное внутреннее отверстие 113, в которое вставляется прессовой посадкой подшипниковая втулка 114. Втулка 114 надета на поворотную цапфу 112 скользящей посадкой, так чтобы втулка и соответственно также ведомый шкив 96 могли вращаться относительно поворотного рычага 92. Пружинное разрезное кольцо 116 прикрепляет ведомый шкив к поворотной цапфе 112.
Бесконечный ремень или гусеничная лента 98 обеспечивает сопряжение между роботом 2 и поверхностью пола и в этом варианте осуществления данного изобретения представляет собой прочный прорезиненный материал, который обеспечивает роботу хорошее зацепление, когда робот перемещается по поверхности и переезжает через изменения в текстуре и контурах поверхности. Хотя это не показано на чертежах, ремень 98 может быть снабжен протекторным рисунком, чтобы увеличить силу сцепления с неровной поверхностью.
Аналогично этому, хотя это не показано на чертежах, внутренняя поверхность 98а ремня 98 зазубрена или снабжена зубцами, с тем чтобы она зацеплялась с ответной по форме зубчатой структурой 98а, обеспеченной на окружной поверхности ведущего шкива 94, что снижает вероятность проскальзывания ремня 98 на шкиве 94. В этом варианте осуществления данного изобретения ведомый шкив 96 не имеет ответной по форме зубчатой структуры, хотя это могло бы быть обеспечено, если желательно. Чтобы предотвратить соскальзывание ремня 96 с ведомого шкива 96, окружные буртики 96а, 96b предусмотрены на его внутреннем и наружном ободах. Что же касается ведущего шкива 94, окружной буртик 94b обеспечен только на его наружном ободе, поскольку ремень 98 не может соскальзывать с внутреннего обода из-за наличия соседней части поворотного рычага 92.
Как будет понятно, поворотный рычаг 98 фиксирует ведущий и ведомый шкивы 94, 96 на определенном расстоянии друг от друга и позволяет ведомому шкиву поворачиваться под углом относительно ведущего шкива 94. Максимальный и минимальный пределы углового перемещения поворотного рычага 92 определяются противоположными дугообразными верхним и нижним стопорными элементами 122а, 122b, которые выступают из приводной стороны корпуса 90 трансмиссии. Стержень или штифт 124, проходящий от внутренней стороны поворотного рычага 92, может входить в зацепление со стопорами 122а, 122b для ограничения перемещения поворотного рычага 92.
Движущий блок 20 также содержит средство смещения поворотного рычага в виде спиральной пружины 118, которая установлена в напряженном состоянии между монтажным кронштейном 126, проходящим вверх от ведущей части поворотного рычага 92, и штифтом 128, выступающим из ведомой части корпуса 90 трансмиссии. Пружина 118 действует для смещения ведомого шкива 96 в зацепление с поверхностью пола при использовании, и это улучшает сцепление, когда робот 2 перемещается по неровной поверхности, такой как ковер с толстым ворсом, или взбирается на препятствия, такие как электрические кабели. На фиг. 9 показаны три примера положений движущего блока 20 в диапазоне перемещения поворотного рычага 92.
В примере варианта осуществления данного изобретения, когда робот 2 находится на поверхности, поворотный рычаг 92 находится в его «минимальном положении перемещения», так что штифт 124 зацепляется с верхним стопором 122а, и пружина 118 действует в натяжении, с тем чтобы она толкала ведомое колесо 96 вниз чисто для улучшения сцепления с поверхностью пола. Однако следует понимать, что более сильная пружина 118 могла бы также использоваться, так чтобы робот был подвешен на движущих блоках, когда он установлен на поверхности.
На фиг. 6 показано относительное положение шкивов 94, 96 относительно поверхности F пола, когда робот 2 находится в неподвижном состоянии, при этом поворотный рычаг 92 расположен на его минимальном пределе перемещения, причем штифт 124 находится в зацеплении с верхним стопором 122а. В этом положении часть гусеничной ленты 98, обмотанная вокруг ведомого шкива 96, образует контактную зону 130 с поверхностью пола, тогда как часть гусеничной ленты 98, расположенная впереди от контактной зоны и проходящая к ведущему шкиву, наклонена относительно поверхности F пола из-за большего радиуса ведомого шкива 96 по сравнению с ведущим шкивом 94. Это обеспечивает движущему блоку 20 наклонную поверхность для взбирания, которая улучшает способность робота 2 вскарабкиваться на неровности в поверхности пола, а также переезжать через поднятые препятствия, такие как, например, электрические кабели/складки или края ковров. Следует отметить, что наклонная поверхность для вскарабкивания обеспечивается в частности, когда нижняя сторона шасси робота находится в ориентации, параллельной поверхности, по которой он перемещается, и поддерживается в этой ориентации множеством роликов 31.
Хотя в этом варианте осуществления данного изобретения наклонная поверхность гусеничной ленты является в основном результатом того, что ведомый шкив 96 имеет больший диаметр, чем ведущий шкив 94, следует понимать, что сравнимый результат мог бы быть получен, если бы шкивы имели одинаковый диаметр, но поворотный рычаг 92 имел бы такую конструкцию, чтобы он поворачивался на больший угол вниз, когда он находится в положении минимального перемещения. Кроме того, следует отметить, что хотя поворотный рычаг 92 обеспечивает ведомому шкиву 96 способность давить на поверхность пола, когда робот перемещается через неровности поверхности, наклонная поверхность гусеничной ленты могла бы быть также обеспечена с ведущим и ведомым шкивами 94, 96 в фиксированных положениях относительно шасси 4. Для обеспечения наклонной гусеничной ленты ведомый шкив мог бы иметь больший диаметр, чем ведущий шкив. Альтернативно или дополнительно центральная ось ведомого шкива могла бы располагаться в более низкой горизонтальной плоскости по сравнению с центром ведущего шкива.
Вдобавок к улучшению способности вскарабкивания наклонной гусеничной ленты 98 по сравнению с простым колесом, движущий блок 20 поддерживает малую контактную зону 130 благодаря его единственному ведомому шкиву 96, что обеспечивает преимущество маневренности, поскольку она не страдает от той степени проскальзывания, которая бы наблюдалась, если бы значительная часть гусеничной ленты 98 находилась в контакте с поверхностью пола.
Дополнительное улучшение сцепления обеспечивается наружным буртиком 96b ведомого шкива 96, который проходит радиально наружу дальше, чем буртик 96а на внутренней стороне шкива 96. Как ясно показано на фиг. 6, наружный буртик 96b проходит почти до того же радиуса, что и наружная поверхность гусеничной ленты 98, и его кромка снабжена оснащенной зубьями или зазубренной структурой. Преимущество этого заключается в том, что в обстоятельствах, в которых робот перемещается по мягкой поверхности, такой как палас или ковер, гусеничная лента 98 будет, как правило, проникать в ворс ковра, в результате чего зазубренная кромка наружного буртика 96b будет зацепляться с ковром и обеспечивать роботу увеличенное сцепление. Однако на твердых поверхностях только гусеничная лента 98 будет контактировать с поверхностью пола, что будет улучшать маневренность робота.
Еще одно преимущество заключается в том, что конструкция гусеничной ленты обеспечивает способность к вскарабкиванию намного большего одиночного колеса, но без большого размера, что позволяет щеточному стержню располагаться очень близко к поперечной оси робота, что является важным в обеспечении очистки на полную ширину. Как видно в этом варианте осуществления данного изобретения, ось вращения ведомого шкива 96 является по существу выровненной с поперечной осью робота, что улучшает маневренность. Чистящая головка способна располагаться очень близко к движущим блокам 20, и в этом варианте осуществления данного изобретения ось чистящей головки расположена приблизительно на расстоянии 48 мм от поперечной оси робота, хотя предусмотрено, что расстояние до 60 мм было бы приемлемым, чтобы минимизировать величину расстояния, на которое чистящая головка выступает из наружной поверхности основного корпуса.
В альтернативном варианте осуществления данного изобретения (не показан) глубина и толщина наружного буртика 96b увеличены, так что поверхность буртика 96b располагается бок о бок с наружной поверхностью гусеничной ленты 98, охватывающей ведомый шкив 96, в действительности обеспечивая поперечное продолжение поверхности гусеничной ленты 98. Это увеличивает площадь контактной зоны 130 также на твердых поверхностях, что может быть желательным в некоторых обстоятельствах. В этом варианте осуществления данного изобретения следует понимать, что способность к вскарабкиванию также сохраняется за счет наклонной поверхности гусеничной ленты без увеличения контактной зоны в продольном направлении гусеничной ленты 98.
Как объяснялось, движущие блоки 20 робота 2 обеспечивают улучшенную способность перемещения по паласам и коврам с высоким ворсом и также преодоления препятствий, таких как электрические кабели, лежащие на полу, и также небольшие порожки между поверхностями пола. Однако приводные блоки «гусеничного» типа могут быть подвержены попаданию мусора в зазор между шкивами и ремнем. Для защиты от этого поворотный рычаг 92 дополнительно включает в себя поднятую коробообразную часть 132, которая проходит наружу от поворотного рычага 92 в пространстве, ограниченном противоположными частями ведущего и ведомого шкивов 94, 96 и внутренней поверхностью гусеничной ленты 98. Боковые поверхности 132а, 132b, 132 с, 132d мусорозащитного блока 132 выполнены такой формы, чтобы они располагались вблизи соседних поверхностей шкивов 94, 96 и ленты 98, тогда как наружная поверхность 134 блока 132 заканчивается приблизительно на одной линии с наружными поверхностями шкивов 94, 96. Блок 132, таким образом, выполнен такой формы, чтобы он занимал по существу весь объем между шкивами 94, 96 и тем самым предотвращал засорение приводной конструкции мусором, таким как осколки или камни. Хотя блок 132 мог бы быть сплошным, в этом варианте осуществления данного изобретения блок 132 включает в себя проемы 136, которые уменьшают вес поворотного рычага 92 и также его стоимость. Хотя блок 132 предпочтительно является неразъемным с поворотным рычагом 92, он мог бы также являться отдельным компонентом, прикрепленным соответствующим образом к поворотному рычагу, например, с помощью зажимов, винтов или клея. Опционально блок может поддерживать пластинчатый элемент, выполненный в форме, подобной границе, образованной ремнем. Это дополнительно снизило бы вероятность попадания грязи в приводную конструкцию.
Обращаясь теперь к фиг. 10, 11 и 12, на них показано, каким образом корпус 6 крепится к шасси 4, чтобы обеспечить относительное скользящее перемещение между ними, и как это относительное перемещение используется роботом 2 для сбора информации о столкновениях с предметами на его пути.
Чтобы обеспечить возможность относительного скользящего перемещения между шасси 4 и корпусом 6, переднее и заднее зацепляющие средства соединяют шасси 4 и корпус 6 друг с другом таким образом, чтобы они не могли быть разделены в вертикальном направлении, т.е. в направлении, перпендикулярном к продольной оси L робота 2, но им позволяется скользить друг относительно друга на небольшую величину.
Обращаясь вначале к передним частям основного корпуса, как лучше всего показано на фиг. 11, переднее зацепляющее средство включает в себя центрально расположенный удлиненный проем 140 в виде прорези, выполненный в форме овала, беговой дорожки/стадиона или усеченного с двух сторон круга, который образован в передней части корпуса 6, конкретно в центральном положении в площадке 48. Скользящий поворотный элемент в виде стяжного штифта 142 вставляется через проем и включает в себя втулочную секцию 142а, которая проходит на небольшое расстояние под проемом 140 и верхним фланцем 142b.
Зацепляющее средство также включает в себя дополняющую по форме конструкцию на передней части шасси 4 в виде снабженной стенками выемки 144, которая также выполнена в форме беговой дорожки/стадиона для соответствия форме проема 140 в площадке 48. Корпус 6 может монтироваться на шасси 4 таким образом, чтобы проем 140 на площадке 48 корпуса 6 перехлестывал выемку 144 в шасси 4. Стяжной штифт 142 затем крепится к дну выемки 144 с помощью механического крепежного элемента, такого как винт; стяжной штифт 142 показан пунктирной линией в его положении в выемке 144 на фиг. 10. Корпус 6, следовательно, прикреплен к шасси 4 против вертикального разделения. Однако, поскольку стяжной штифт 142 прикреплен неподвижно к шасси 4 и в то же время удерживается с возможностью скольжения в проеме 140, корпус 6 может скользить относительно стяжного штифта 142 и может поворачиваться под углом вокруг него благодаря его округлой форме.
Передняя часть шасси 4 также включает в себя два канала 145, по одному, расположенному на каждой стороне выемки 144, которые служат в качестве опорной поверхности для соответствующих роликов 147, предусмотренных на нижней стороне корпуса 6, и более конкретно на площадке 48 с каждой стороны проема 140. Ролики 147 обеспечивают опору для корпуса 6 на шасси 4 и способствуют плавному скользящему перемещению между этими двумя частями, и они показаны штриховой линией на фиг. 10.
Заднее средство зацепления ограничивает перемещение задней части 150 корпуса 6 относительно шасси 4. Из сравнения между фиг. 11 и 12 можно видеть, что задняя часть 146 шасси 4 позади чистящей головки 24 включает в себя средство 148 обнаружения столкновения, которое также служит в качестве крепежного приспособления, с помощью которого задняя часть 150 корпуса присоединяется к шасси 4.
Каждая сторона средства обнаружения столкновения включает в себя средство поддержки корпуса; причем оба средства поддержки корпуса являются идентичными, и соответственно только одно будет описано подробно для краткости. Средство поддержки корпуса содержит втулочный трубчатый опорный элемент 152, который установлен в чашеобразном углублении 154, образованном шасси 154. В этом варианте осуществления данного изобретения чашеобразное углубление 154 обеспечено в съемной части шасси, выполненной в виде пластинчатого элемента 155, который прикреплен поперек задней части 146 шасси 4. Однако углубления 154 могли бы также являться неразъемной частью шасси 4.
Пружина 156 присоединена к шасси 154 на ее нижнем конце и проходит через втулочный элемент 152, причем конец пружины заканчивается проушиной 158. Втулка 152 и пружины 156 зацепляются с дополняющим их по форме гнездом 160 на нижней стороне корпуса 6, причем гнездо 160 включает в себя поднятую стенку 160а, с помощью которой верхний конец втулки 152 устанавливается на место, когда корпус 6 смонтирован на шасси 4. Когда они смонтированы таким образом, пружина 156 проходит в центральный проем 162 в гнездо 160, и проушина 158 прикрепляется к крепежному штифту внутри корпуса 6. Отметим, что крепежный штифт не показан на чертежах, но может представлять собой любой штифт или подходящее крепежное место, к которому может прикрепляться пружина.
Поскольку опорные втулочные элементы 152 подвижным образом смонтированы между шасси 4 и корпусом 6, втулочные элементы 152 могут наклоняться в любом направлении, что позволяет корпусу 152 «качаться» прямолинейно вдоль продольной оси «L» робота, но также задней части корпуса 6 поворачиваться под углом, поворачиваясь вокруг стяжного штифта 142 приблизительно на угол 10°, ограниченный задним зацепляющим средством, как будет теперь объяснено дополнительно. В этом варианте осуществления данного изобретения пружины 156 обеспечивают самоцентрирующее усилие опорным втулочным элементам 152, которое перемещает втулочные элементы 152 в вертикальное положение, причем это действие также обеспечивает также усилие возврата в исходное положение для системы обнаружения столкновений. В альтернативном варианте осуществления данного изобретения (не показанном) опорные втулочные элементы 152 могли бы быть сплошными, и усилие для «восстановления» исходного положения корпуса относительно шасси могли бы обеспечиваться альтернативным механизмом смещения.
Хотя втулочные элементы 152 позволяют корпусу 6 «ехать» на шасси 4 с определенной величиной поперечного перемещения, они не присоединяют прочно заднюю часть 150 корпуса 6 к шасси 4 против вертикального разделения. Для этой цели средство 148 обнаружения столкновений включает в себя первый и второй направляющие элементы в виде стоек или стержней 160, 162, предусмотренные на корпусе 6, которые зацепляются с соответствующими штифтами 164, 166, обеспеченными на шасси 4. Как можно видеть на фиг. 12, штифты 164, 166 проходят через соответствующие окна 168, 170, образованные в пластинчатом элементе 155, и удерживаются там соответствующей шайбой 172, 174. Чтобы смонтировать заднюю часть 150 корпуса 6 на заднюю часть 146 шасси 4, направляющие элементы 160, 162 плотно насаживают на штифты 164, 166 до тех пор, пока они не войдут в контакт с их соответствующими шайбами 172, 174. Перемещение задней части 150 корпуса 6, следовательно, ограничено, чтобы соответствовать форме окон 168, 170 таким образом, что окна служат в качестве направляющей дорожки. В этом варианте осуществления данного изобретения окна 168, 170 имеют по существу треугольную форму, и таким образом это позволит корпусу 6 скользить прямолинейно относительно стяжного штифта 142, но также поворачиваться под углом вокруг него в пределах границ перемещения, установленных окнами 168, 170. Однако следует отметить, что разрешенное перемещение корпуса 6 может быть изменено соответствующим изменением формы окон 168, 170.
Средство 148 обнаружения столкновения также включает в себя переключающее средство 189 для обнаружения перемещения корпуса 6 относительно шасси 4. Переключающее средство 180 включает в себя первый и второй миниатюрные выключатели 180а, 180b защелкивающего действия (также обычно известные под названием «микровыключатели»), предусмотренные на нижней стороне задней части 150 корпуса 6, которые, когда корпус 6 присоединен к шасси 4, располагаются на каждой стороне привода 182, предусмотренного в центральной части задней части 146 шасси 4. В этом варианте осуществления данного изобретения привод 182 имеет клинообразную форму, имеющую скошенные под углом ведущие кромки для активации выключателей 180а, 180b. Хотя это не показано на чертежах, выключатели 180а, 180b связаны со средствами управления робота. Расположение выключателей 180а, 180b относительно клинообразного привода 182 показано на фиг. 12; отметим, что выключатели 180а, 180b показаны пунктирными линиями. Как можно видеть, выключатели 180а, 180b расположены таким образом, что их активирующие рычаги 183 располагаются непосредственно рядом и с каждой стороны скошенных под углом передних кромок клинообразного привода 182.
Выключатели 180а, 180b активируются в обстоятельствах, при которых робот 2 сталкивается с препятствием, когда робот перемещается по комнате для выполнения задачи чистки. Такое средство обнаружения столкновения желательно для автономного пылесоса, поскольку системы измерения и маршрутизации таких роботов могут иметь сбои, и иногда препятствие не будет обнаружено вовремя. Другие роботизированные пылесосы работают на основании методики «случайных столкновений», в которой средство для обнаружения столкновения является необходимым. Следовательно, средство обнаружения столкновений необходимо для обнаружения столкновений, так чтобы робот мог предпринять действие, чтобы избежать столкновения. К примеру, средство управления может определять просто, следует ли реверсировать робот и затем возобновить перемещение вперед в другом направлении, или альтернативно прекратить перемещение вперед, повернуться на 90° или 180° и затем снова возобновить перемещение вперед.
Активация выключателей 180а, 180b теперь будет объяснена со ссылкой на фиг. 13а, 13b, 13с и 13d, на которых показано схематическое изображение шасси 4, корпуса 6 и средства обнаружения столкновений в различных ситуациях столкновений. На последующих чертежах части, общие с предыдущими чертежами, указаны одинаковыми условными обозначениями.
На фиг. 13а показаны относительные положения корпуса 6, шасси 4, стяжного штифта 142, проема 140 для поворота корпуса, выключателей 180а, 180b и клинообразного привода 182 в положении отсутствия столкновения. Как можно видеть, ни один из выключателей 180а, 180b не был активирован, как указано условным обозначением «X».
На фиг. 13b показан робот 2 в состоянии столкновения с препятствием в положении «невозможности движения вперед», как указано стрелкой С.Корпус 6 заставляют перемещаться назад прямолинейно, т.е. вдоль его продольной оси L и соответственно два выключателя 180а, 180b перемещаются назад относительно клинообразного привода 182, тем самым включая выключатели 180а, 180b по существу одновременно, что указано галочками.
Альтернативно, если робот 2 сталкивается с препятствием на его правой стороне, как указано стрелкой С на фиг. 13с, это заставляет корпус 6 поворачиваться вокруг стяжного штифта 142 влево, и в этих обстоятельствах выключатели 180а, 180b будут перемещаться влево относительно привода 182, в результате чего правый выключатель 180b активируется до активации левого выключателя 180а, как указано галочкой для выключателя 180b.
И наоборот, если робот 2 сталкивается с препятствием на его левой стороне, как указано стрелкой С на фиг. 13d, это заставляет корпус 6 поворачиваться направо, и в этом случае выключатели 180а, 180b будут перемещаться направо относительно привода 182, что следовательно включает левый выключатель 180а до включения правого выключателя 180b, как указано галочкой для выключателя 180а.
Хотя при столкновениях под острым углом, показанных на фиг. 13с и 13d, только один из выключателей 180а, 180b показан как активированный, следует понимать, что такое столкновение может также активировать другой из выключателей, хотя в более позднее время, чем первый активированный выключатель.
Поскольку робот 2 способен обнаруживать столкновения путем определения относительного линейного и углового перемещения между корпусом 6 и шасси 4, данное изобретение избегает необходимости установки защитного бампера на передней части робота, что является обычным для известных роботизированных пылесосов. Бамперы могут быть хрупкими и громоздкими, так что данное изобретение увеличивает прочность робота и также делает возможным уменьшение размеров и сложности.
Для полноты на фиг. 14 показано схематически средство управления робота и его связи с компонентами, описанными выше. Средство управления в виде контроллера 200 включает в себя соответствующую схему управления и процессорные функциональные блоки для обработки сигналов, принимаемые от его различных датчиков и для приведения в движение робота 2 соответствующим образом. Контроллер 200 связан с блоком 82 датчиков робота 2, с помощью которого робот собирает информацию о его ближайшем окружении, чтобы определять схему его окружения и планировать оптимальный маршрут для чистки. Модуль памяти 201 обеспечен для контроллера для выполнения его процессорных функций, и следует понимать, что модуль памяти 201 мог бы быть альтернативно встроен в контроллер 200 вместо того, чтобы являться отдельным компонентом, как показано здесь.
Контроллер 200 также имеет соответствующие вводы от пользовательского интерфейса 204, средства 206 обнаружения столкновений и соответствующего средства 208 измерения вращения, такого как вращающиеся цифровые датчики перемещений, предусмотренные на движущих блоках 20. Силовые и управляющие вводы обеспечены в движущие блоки 20 от контроллера 200 и также в засасывающий двигатель 210 и двигатель 212 щеточного стержня.
И наконец, силовой ввод обеспечен в контроллер 200 от аккумуляторной батареи 214, и предусмотрен зарядный интерфейс 216, с помощью которого контроллер 200 может осуществлять зарядку аккумуляторной батареи 214, когда напряжение питания батареи упадет ниже соответствующего порогового значения.
Многие разновидности возможны без отхода от новаторской концепции изобретения. К примеру, хотя движущие блоки 20 были описаны как имеющие бесконечный прорезиненный ремень или гусеничную ленту, данное изобретение могло бы быть также осуществлено с гусеничной лентой, которая содержит многочисленные отдельные гусеничные или протекторные секции, соединенные друг с другом для образования цепи.
В описанном выше варианте осуществления данного изобретения корпус 6 был описан как способный перемещаться прямолинейно, а также под углом относительно шасси. Однако следует понимать, что это сделано для того, чтобы столкновения можно было обнаруживать с широкого диапазона углов, и что данное изобретение заключается также в системе обнаружения столкновений, в которой корпус перемещается прямолинейно или под углом относительно шасси, вместо сочетания таких перемещений.
Средства датчиков были описаны как содержащие выключатели защелкивающегося действия, расположенные с каждой стороны клинообразного привода, и что такая конструкция удобно позволяет активировать выключатели, когда корпус перемещается прямолинейно (оба выключателя активируются одновременно) или под углом (один выключатель активируется перед другим). Однако специалист в данной области техники поймет, что возможны другие включающие механизмы, например, бесконтактные выключатели, такие как выключатели с оптическим управляющим сигналом или магнитный/основанный на эффекте Холла выключатель.
Реферат
Автономное устройство для обработки поверхности, содержащее шасси, имеющее приводную конструкцию и систему управления, связанную с приводной конструкцией для обеспечения управления устройством на поверхности, подлежащей обработке, причем приводная конструкция содержит по меньшей мере один движущий блок, причем каждый движущий блок содержит зацепляющуюся с поверхностью гусеничную ленту (98), обмотанную вокруг ведущего шкива (94) и ведомого шкива (96), причем ведущий шкив и ведомый шкив расположены таким образом, чтобы часть гусеничной ленты, расположенная напротив поверхности пола и проходящая между ведущим и ведомым шкивами, образовывала наклонную поверхность для вскарабкивания. 42 з.п. ф-лы, 14 ил.
Комментарии