Тканеформирующий механизм ткацкого станка с волнообразно подвижным зевом - SU739144A1
Код документа: SU739144A1
Чертежи
Описание
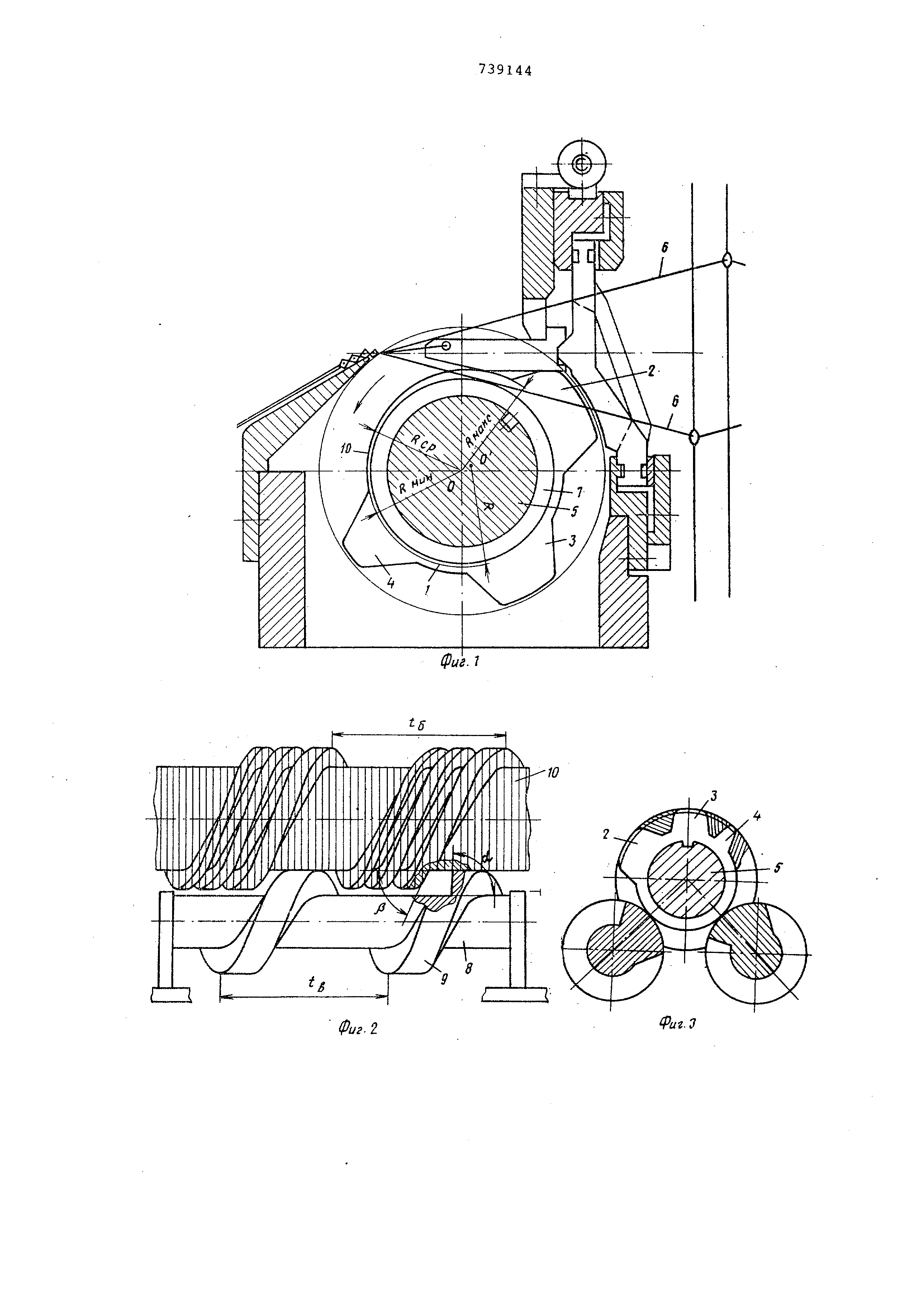
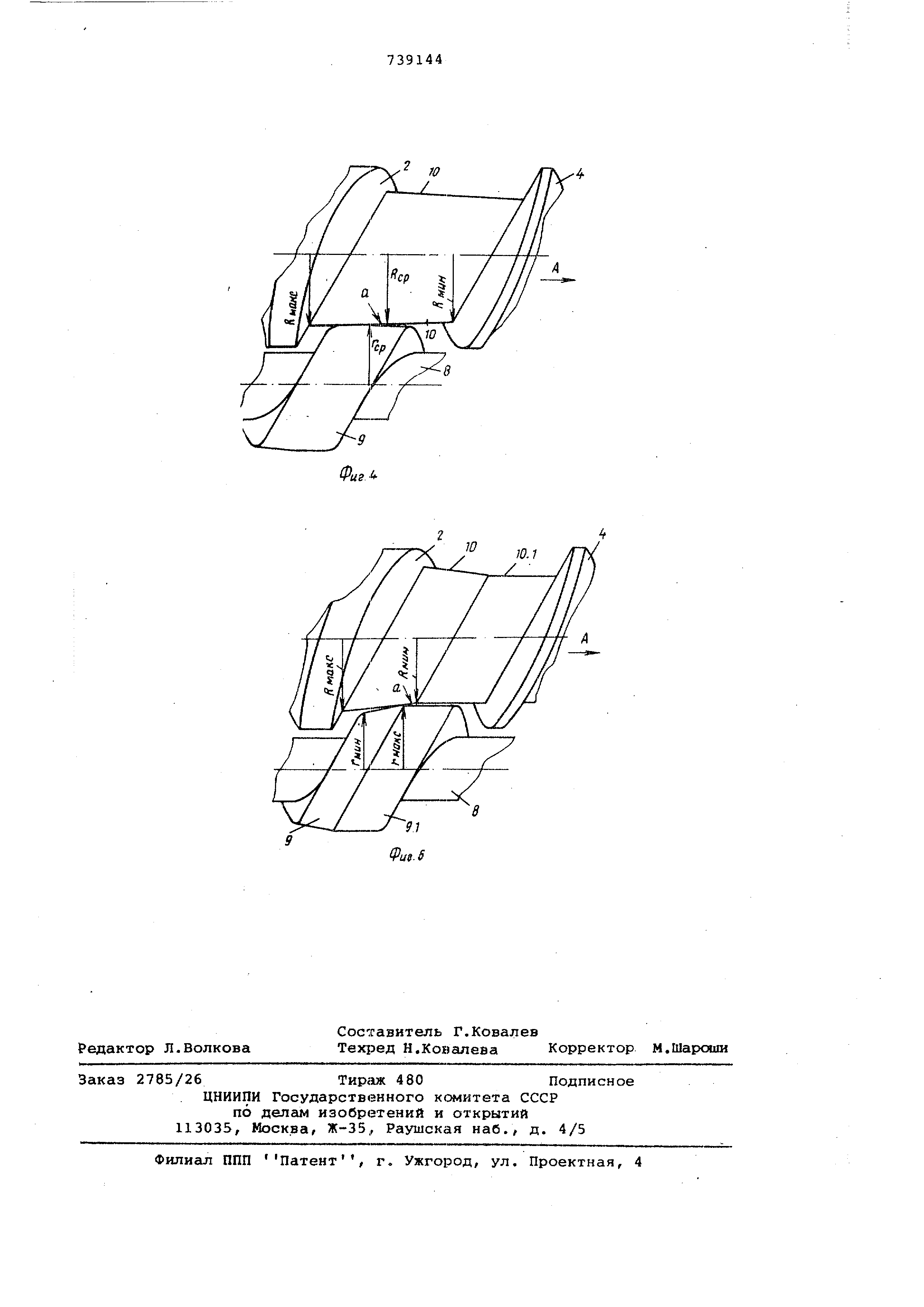
Изобретение относится к текстильному машиностроению. Известен тканеформирующий механиз ткацкого станка с волнообразно подви ным зевом, содержащий бердо, образованное рядом соосно установленных дисков с зубьями,расположенных по ви товой линии, и опорные валики 1. Опорные валики контактируют с вершинами зубьев дисков и приводятся во вращение от этих дисков. Недостаток этого механизма состои в том, что опорные валики деформируют зубья дисков берда. Известен также тканеформирующий механизм ткацкого станка с волнообразно подвижным зевом, содержащий бердо,образованное рядом соосно установленных дисков с зубьями, положенными по винтовой линии, и опорные ваипики. На поверхности каждого опорного валика-имеется винтов выступ с шагом винта, равным шагу винтовой линии берда. Причем винтов выступ опорного валика контактирует с поверхностью впадин дисков берда Однако в этом механизме валики опорных элементов приводятся во вращение синхронно с бердом специальным приводом. Целью изобретения является упрощение конструкции механизма. Для достижения этой цели в тканеформирующем механизме ткацкового станка с волнообразно подвижным зевом, одна из контактирующих поверхностей дисков берда и опорных валиков имеет по меньшей мере одинучасток с переменным радиусом сечения вдоль оси, уменьшающимся в направлении перемещения точек контакта винтовых поверзеностей . Контактирующие участки с переменным радиусом сечения имеют коническую форму. Величины средних радиусов контактирующих поверхностей впадин дисков берда и опорных валиков равны. Такое выполнение контактирующих поверхностей приводит к фрикционной самоустановке в процессе вращения ведомых опорных валиков отросительно берда и позволяет обойтись без дополнительного привода опорных валиков. На фиг..1 изображен Ь канефогя ирующий механизмj 1вид сбоку; на фиг.2 - участок берда с опорнь1м валиком, вид спереди; на фиг.З бердо с опорными валиками вид сбоку; на фиг „4 участок контактирукяцих повб:рхностей, вид спереди; на фиг, 5 то же, вариант выполнения. Тканеформирующий механизм содержи бердо, образованное рядом дисков .1 с зубьями 2-4, смонтированных на ;ьэ.лу 5 так, ITO их зубья располагаются по Еинтовой линии (фиг„1). Для образования проме.жутков для HiiTafi основы 6 между соседними дисссами I усгансвлены дистанционные котмьца 7„ Снизу берда для предотвращения прогиба и вибраци установ/ ены опорные валики 8 с винтовыми выступаЛШ 9, имеющими шаг винта tg ,рг1Вный шагу винтовой линии берда t „ Винтовые выступы 9 заходят во впсццины 10 дисков берда, расположенные; между 3y6bHNtti 2 и 4 диска 1 (фиг„1) ,)для предотвращения износа поверхности зубьев 2-4 дисков 1 высота выступа 9 опорных валиков выбирается болъ 1яе глубины впадины 10 берда (фиг„2} Угол d профиля выступа .опорного валика выполняется больше угла f профиля зубьез 2 и 4 (фиг,2), тем самым становится невозможны1«1 контакт вершин зубьев 2, 4с поверхностью выступа 9 опорного валика 8, которы мог бы привести к аварии. Коническая форма контактной поверхности берда обеспечивается выполнением впадины 10 диска 1 радиусом К из центра О ,- смещенного в сторону зуб 2 относительно оси вращеиия О вала При этом впа/дина 10 имеет минимальную зысот - - К(4,,,,дн и максимальную высоту К,. HHiviH находится сред няя высота - RCO Выст-уп опорного валика имеет коническую форлгу с радиусом сечения, уменьшалощимся в направлении абсолютного перемещения Точек контакта винтовых поверхносте ( направление показано стрелкой А), при этом средний ргщиус выступа равен P-tp, впадины 10 берда (фиг„4) „ Выступ опорного валика и впадина бе да могут иметь по два участка При этом участки 9 и 10 конической а участки 9,-1 и 10.1 - цилиндрической формы„ Возможно в качестве контактирующей поверхности опорного Всшика использовать сферическую или цилиндрическую поверхность При работе бердо тканеформирутоще го механизма совер аает вращательное движениеJ контактируя впадиной 10 с БыступсЦ ш 9 опорных валиков 8, щоиводя последние во вращение, Если валики вращаются без скольжения (со скоростью берда) j, то радиус х выст па 9 контактирует с R ср зпадяны 10 берда. Так как контактна пара бердо-валики работает со скЭль жениеМр то в начальный момент скорость враш.ения валиков меньше скорости врагцения берда, ТсО, валики отстают и их выступы смещаются в сторону, противоположную направлению стрелки Л (фиг,4, 5) на величину а. Такое переме иение происходит о тех пор, пока скорость вращения валика 8 не будет равна скорости вращения берда, при этом высота точки KotJTaKTa выступа валика будет меньше высоты точки контакта . впадины бердао Такая самоустановка опорных валиков при ско.:ь кении обеспечивает надежный их привод от берда, при этом, чем больше скольжение, тем больше и величина смещения а. Практически нормальный привод опорных валиков обеспечивается при разнос порядка 0,2ти мелоду 0,3 мм Использование описываемого механизма позволяет избавиться от специального привода опорных валиков путем придания специальной фор;- ш контактирующим поверхностям берда и валиков, обеспечивающей вращение последних и самоустановку их выступов во впадине берда Формула изобретения 1 о Тканеформирующий механизм ткацкого станка с волнообразно подвижны зевом , содержащий бердо, образованное рядом соосно установленных дисков с зубьями, расположенными по винтовой линии, и опорные валики, на поверхности кшкдого из КОТОШ1Х имеется винтовой выступ с шагом винта, равным шагу винтовой линии берда, и контактирующий с поверхностью впгшин дисков берда, отличающийся тем, что, с целью упрощения конструкции механизма одна из контактирующих поверхностей дисков берда и опорных }заликов имеет по меньшей мере один участок с переменным радиусом сечения вдоль оси, уменьшаюиимся з направлении перемещения точек контакта винтовых поверхностей о 2.Механизм по п„1, о т л и ч а ю щ и и с я тем, что контактирующие участки с переменным радиусом сечения имеют коническую форму. 3.Механизм по п.1, о,т л и чаю j« и и с я тем, что величины средних радиусов KOI-Sтактирующих поверхностей впадин дисков берда и опорных валиков равны„ Источники информации, принятые во вниман5 е при экспертизе 1.Заявка ФРГ 2328210,кл .86 С 17, 1972. 2.Патент США №3895654.клЛ 39-12, 1974 (прототип
Реферат
Формула
Комментарии