Приводное устройство для робота-пылесоса - RU2267977C1
Код документа: RU2267977C1
Чертежи

Описание
Настоящее изобретение относится к приводному устройству для робототехнического чистящего устройства (робота-пылесоса), а более точно к приводному устройству для робототехнического чистящего устройства, имеющему амортизирующее устройство, которое позволяет робототехническому чистящему устройству плавно перемещаться через препятствие, такое как ковер или дверной порог, во время чистки.
Несмотря на частые случаи использования пылесоса при выполнении работ по дому, чистка с помощью пылесоса остается изнурительной домашней работой, поскольку пользователю приходится непосредственно манипулировать пылесосом для выполнения множества различных операций чистки. Для решения этой проблемы было разработано робототехническое чистящее устройство, при этом указанное робототехническое чистящее устройство было способно перемещаться и автоматически выполнять чистку без манипулирования им с помощью внешнего устройства. В последнее время в дополнение к этой функции было разработано робототехническое чистящее устройство, позволяющее выполнять функции обеззараживания помещения от бактерий и очистки воздуха в доме.
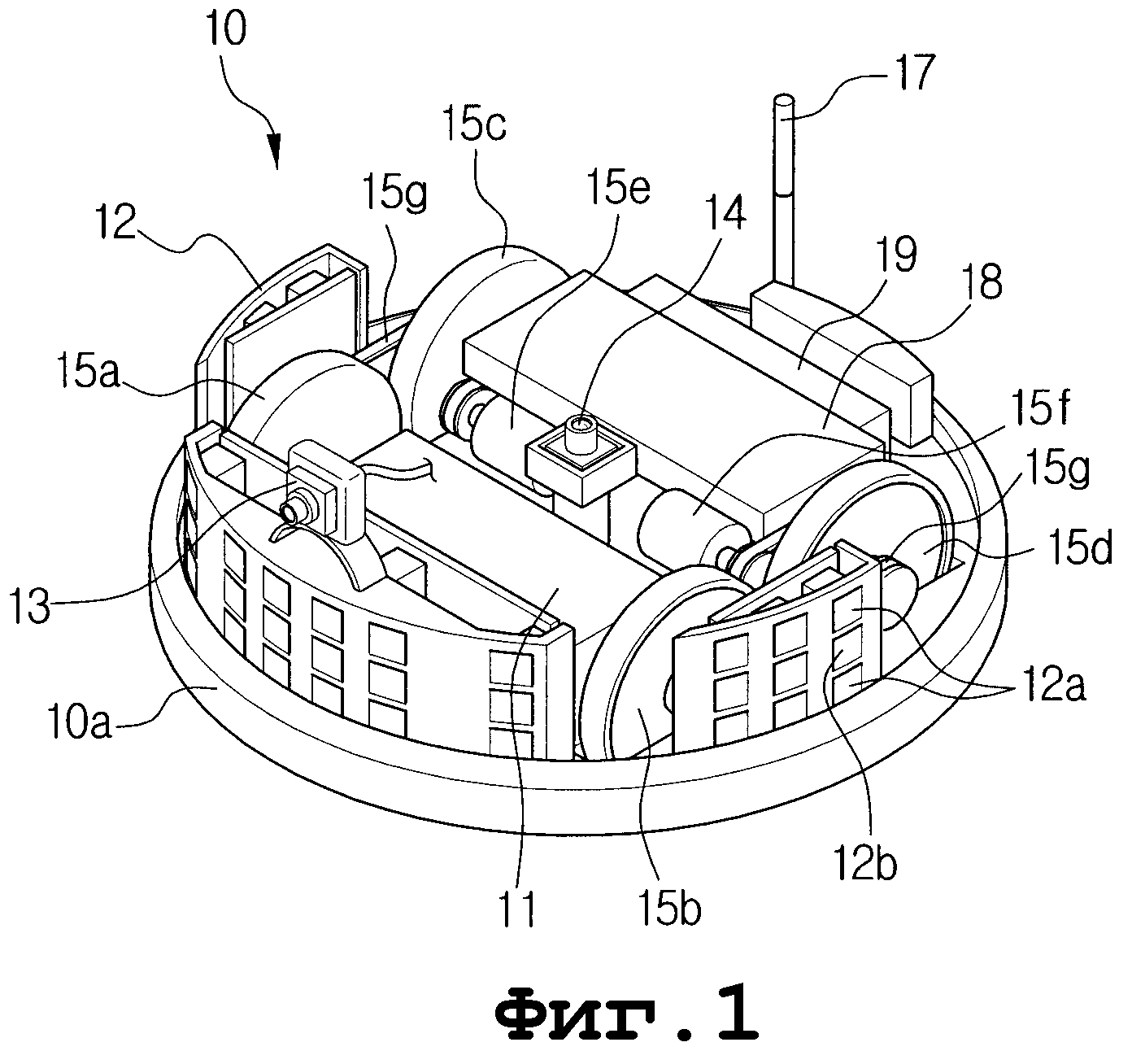
Фиг.1 представляет собой вид в перспективе, показывающий обычное робототехническое чистящее устройство со снятой крышкой.
Как показано на фиг.1, робот-пылесос 10 включает часть 11 для всасывания, расположенную на корпусе 10а, сенсорную часть 12, переднюю камеру 13, верхнюю камеру 14, приводное устройство 15, приемопередающее устройство 17, управляющее устройство 18 и аккумуляторную батарею 19. Часть 11 для всасывания расположена на корпусе 10а и обеспечивает всасывание насыщенного пылью воздуха с поверхности, подвергаемой чистке и противолежащей по отношению к нему. Часть 11 для всасывания имеет хорошо известную конструкцию, например часть 11 для всасывания включает в себя электродвигатель для создания всасывающей силы (непоказанный) и пылесборник для сбора пыли, которая всасывается внутрь через всасывающее отверстие или всасывающую трубу, расположенную напротив поверхности, подвергаемой чистке, под действием электродвигателя для создания всасывающей силы. Сенсорная часть 12 включает в себя датчик 12а для обнаружения препятствия, расположенный вдоль окружной периферии корпуса сенсорной части 12 на заданном расстоянии и предназначенный для передачи сигналов наружу и приема отраженного сигнала, и датчик 12b для определения длины перемещения, предназначенный для измерения длины перемещения робота-пылесоса 10. Передняя камера 13 расположена на корпусе 10а и предназначена для фотографирования передних изображений и передачи сфотографированных изображений управляющему устройству 18. Верхняя камера 14 расположена на корпусе 10а и предназначена для фотографирования верхних изображений и передачи сфотографированных изображений управляющему устройству 18. Передняя и верхняя камеры 13, 14 представляют собой возможные, но необязательные устройства. Приводное устройство 15 включает два ведомых колеса 15а и 15b, расположенных у обеих передних сторон, два ведущих колеса 15с и 15d, расположенных у обеих задних сторон, электродвигатели 15е и 15f, соответственно приводящие во вращение два задних ведущих колеса 15с и 15d, и синхронный ремень 15g, предназначенный для передачи движущей силы от двух задних ведущих колес 15 с и 15d двум передним ведомым колесам 15а и 15b. Приводное устройство 15 обеспечивает приведение во вращение соответствующих электродвигателей 15е и 15f независимо друг от друга в направлениях по часовой стрелке /против часовой стрелки в соответствии с управляющим сигналом от управляющего устройства 18. Изменение направления движения робототехнического чистящего устройства осуществляется путем приведения электродвигателей 15е и 15f во вращение с различным количеством оборотов в минуту.
Управляющее устройство 18 обрабатывает сигналы, которые получены посредством приемопередающего устройства 17 и управляет соответствующими компонентами соответствующим образом. Робот-пылесос 10 может дополнительно содержать клавишное устройство ввода (непоказанное). В этом случае клавишное устройство ввода (непоказанное) может быть выполнено в корпусе 10а и имеет множество клавиш для управления настройкой функций робота-пылесоса 10, и управляющее устройство 18 обрабатывает сигнал от клавиши, введенный посредством клавишного устройства ввода (непоказанного).
Аккумуляторная батарея 19 расположена на корпусе 10а, и перезарядка ее осуществляется через вывод (непоказанный) аккумуляторной батареи, предназначенный для перезарядки и расположенный снаружи корпуса 10а, и аккумуляторную батарею подсоединяют к внешнему зарядному устройству (непоказанному) и отсоединяют от внешнего зарядного устройства.
Робот-пылесос 10 передает изображения, сфотографированные передней и верхней камерами 13 и 14, наружу посредством беспроводной передачи. Робот-пылесос 10 работает в соответствии с управляющим сигналом, полученным извне.
Когда приводное устройство 15 приводит во вращение соответствующие электродвигатели 15а и 15f в одном и том же направлении, два ведущих колеса 15с и 15d и два ведомых колеса 15а и 15b приводятся во вращение в одном и том же направлении, тем самым обеспечивая перемещение корпуса 10а пылесоса в линейном направлении.
Когда электродвигатели 15е и 15f приводятся во вращение в разных направлениях, два ведущих колеса 15 с и 15d и два ведомых колеса 15а и 15b вращаются в противоположных направлениях, что также обеспечивает перемещение корпуса 10а в направлении, соответствующем направлению вращения. Когда препятствие, такое как дверной порог или ковер, находится перед роботом-пылесосом 10, приводное устройство 15 обычного робота-пылесоса 10 приводит во вращение два ведущих колеса 15с и 15d и два ведомых колеса 15а и 15b в разных направлениях, чтобы избежать препятствия. Тем не менее иногда пользователь хочет, чтобы робот-пылесос 10 переместился через препятствие и выполнил чистку места над препятствием, но обычный робот-пылесос не обладал способностью сделать это, поскольку обычно он изменяет направление своего движения при распознавании препятствия, находящегося впереди него. Если пользователь потянет робот-пылесос 10 через препятствие, возникает шум и часто происходят удары, что вызывает снижение долговечности робота-пылесоса.
Таким образом, технической задачей настоящего изобретения явилось создание робота-пылесоса, устраняющего вышеуказанные недостатки и несоответствия.
Настоящее изобретение позволяет решить вышеуказанную техническую задачу. В соответствии с одним аспектом настоящего изобретения разработан робот-пылесос с приводным устройством, которое позволяет роботу-пылесосу плавно перемещаться через препятствие, такое как ковер или дверной порог. В соответствии с другим аспектом изобретения разработан робот-пылесос, плавно перемещающийся через зону, подвергаемую очистке, не создавая шума, за счет амортизации ударов, имеющих место, когда робот-пылесос перемещается через препятствие.
Вышеуказанные особенности достигаются за счет создания приводного устройства робота-пылесоса, содержащего корпус робота-пылесоса, два электродвигателя, расположенных в корпусе робота-пылесоса, которые приводятся в действие с помощью соответствующих источников питания, два ведущих колеса, приводимых во вращение с помощью двух электродвигателей, и два ведомых колеса, следующих за двумя ведущими колесами. Приводное устройство дополнительно включает в себя средство для передачи движущей силы, которое заставляет ведущие колеса и ведомые колеса двигаться совместно друг с другом, сборный корпусной элемент, расположенный в корпусе робота-пылесоса и предназначенный для обеспечения опоры для двух ведущих колес и двух ведомых колес, и амортизирующее устройство, расположенное в сборном корпусном элементе и предназначенное для амортизации удара, возникающего из-за воздействия со стороны поверхности, подвергаемой чистке. В одном варианте осуществления средство для передачи движущей силы представляет собой синхронный ремень, а сборный корпусной элемент выполнен с кожухами электродвигателей, при этом каждый кожух электродвигателя проходит от сборного корпусного элемента в осевом направлении электродвигателя.
Амортизирующее устройство включает верхний опорный элемент, нижний опорный элемент, соответствующий верхнему опорному элементу, упругий элемент, расположенный между верхним опорным элементом и нижним опорным элементом, и цельную ось, проходящую через верхний опорный элемент, упругий элемент и нижний опорный элемент.
В другом варианте осуществления упругий элемент представляет собой цилиндрическую винтовую пружину, а сборный корпусной элемент включает верхний закрывающий элемент, первый нижний закрывающий элемент, расположенный у верхнего закрывающего элемента, и второй нижний закрывающий элемент, присоединенный к первому нижнему закрывающему элементу и расположенный у верхнего закрывающего элемента. Верхний закрывающий элемент может дополнительно содержать опорный элемент, предназначенный для обеспечения опоры для амортизирующего устройства, и иметь отверстие, образованное в опорном элементе. Кроме того, первый нижний закрывающий элемент имеет выступ, образованный на его боковой стороне, а верхний закрывающий элемент имеет выемку, выполненную в нем для обеспечения возможности поворота выступа в ней вокруг оси ведущих колес. Выемка может иметь дугообразную форму.
В еще одном варианте осуществления верхний закрывающий элемент прочно закреплен на корпусе робота-пылесоса, а амортизирующее устройство расположено между верхним закрывающим элементом и первым и вторым нижними закрывающими элементами. Амортизирующее устройство поворачивается вокруг оси ведущих колес вместе с ведомыми колесами в соответствии с состоянием поверхности, подвергаемой чистке.
В еще одном варианте осуществления электродвигатели непосредственно соединены с ведущими колесами, которые обеспечивают перемещение корпуса робота-пылесоса, и ведущие колеса и ведомые колеса имеют пилообразные зубья на наружных перифериях.
Другие системы, способы, признаки и преимущества настоящего изобретения будут или станут понятны для специалиста в данной области техники при изучении нижеприведенных чертежей и подробного описания. Предполагается, что все подобные системы, способы, признаки и преимущества включены в данное описание, находятся в объеме настоящего изобретения и защищены прилагаемой формулой изобретения.
Вышеуказанные особенности и другие признаки настоящего изобретения будут описаны более подробно со ссылкой на прилагаемые чертежи. Детали и элементы на чертежах необязательно представлены в масштабе, вместо этого упор сделан на четкое иллюстрирование принципов настоящего изобретения. Кроме того, на чертежах аналогичные ссылочные позиции обозначают аналогичные элементы на всех видах.
Фиг.1 - вид в перспективе обычного робота-пылесоса со снятой крышкой;
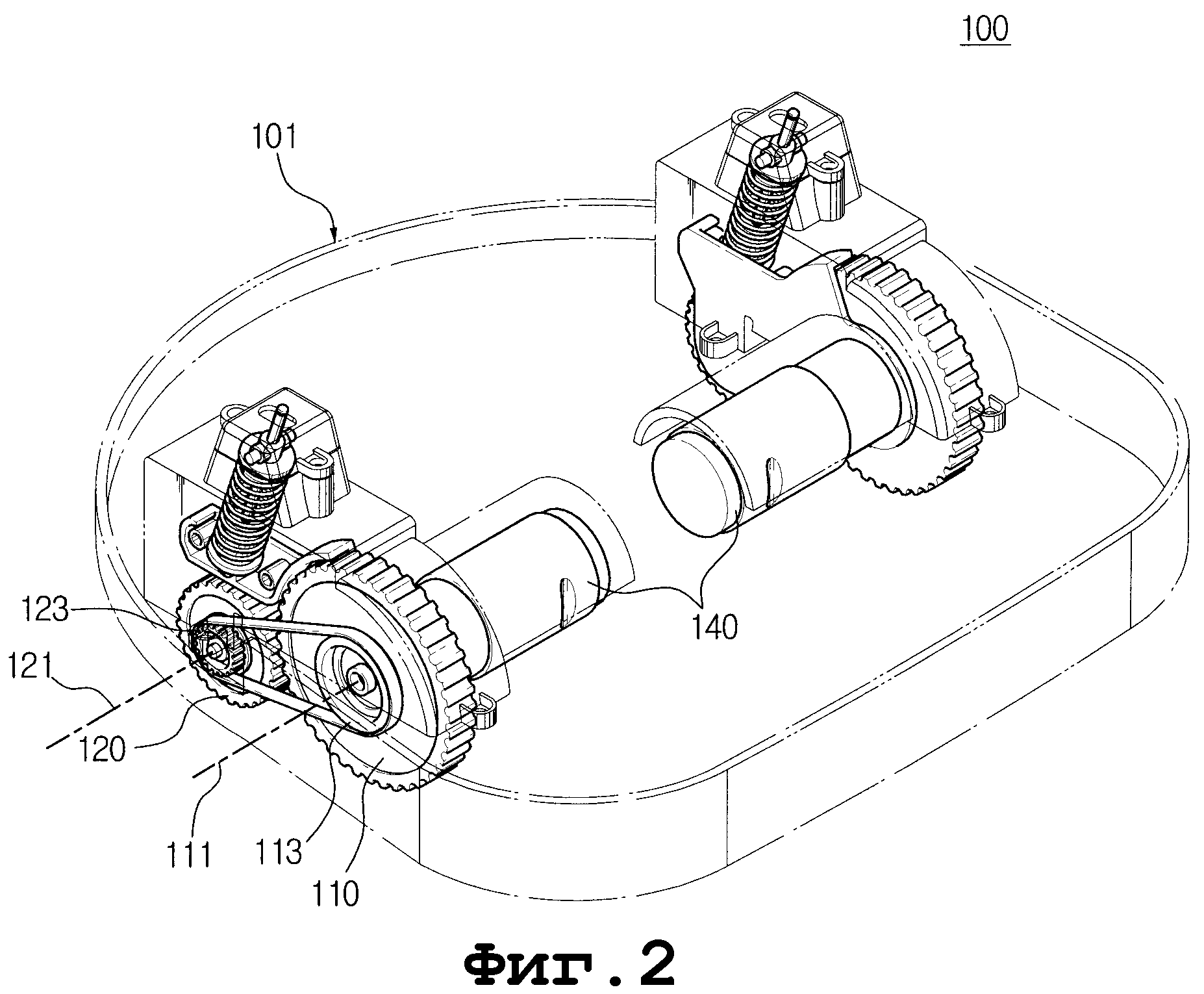
фиг.2 - вид в перспективе приводного устройства робототехнического чистящего устройства в соответствии с вариантом осуществления настоящего изобретения;
фиг.3 - выполненное с пространственным разделением элементов, перспективное изображение приводного устройства робота-пылесоса в соответствии с вариантом осуществления настоящего изобретения; и
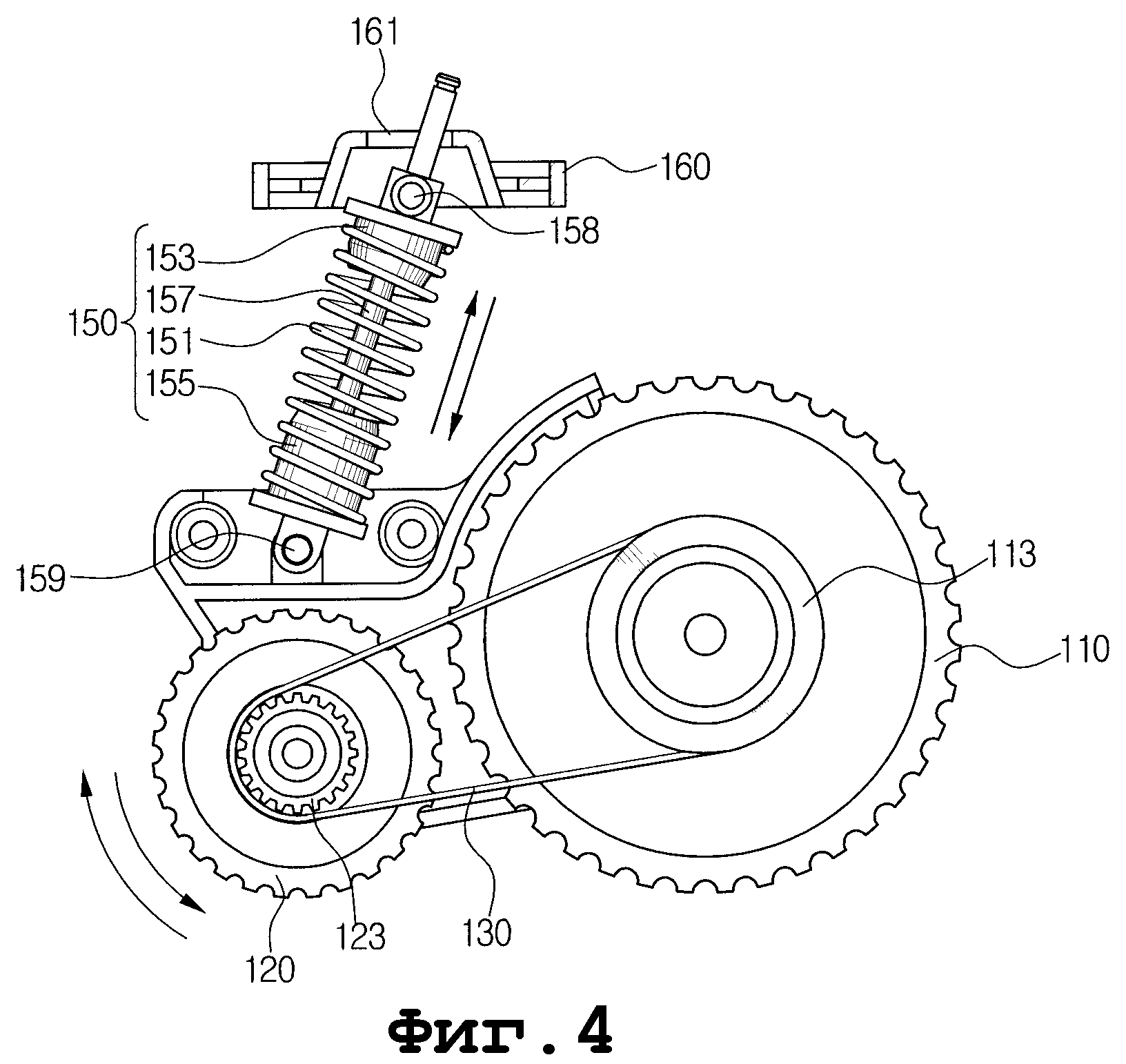
фиг.4 - вертикальный вид сбоку приводного устройства робота-пылесоса в соответствии с настоящим изобретением.
Далее настоящее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи.
Робот-пылесос 100 с приводным устройством согласно настоящему изобретению имеет такую же конструкцию, как и общеизвестный робот-пылесос 10, показанный на фиг.1. Робот-пылесос 10 включает часть 11 для всасывания, расположенную на корпусе 10а, сенсорную часть 12, переднюю камеру 13, верхнюю камеру 14, приводное устройство 15, приемопередающее устройство 17, управляющее устройство 18 и аккумуляторную батарею 19. Поскольку конструкция и функционирование робота-пылесоса 100 аналогичны конструкции и функционированию робота-пылесоса 10 по фиг.1, их описания опущены.
Как показано на фиг.2 и 3, приводное устройство робота-пылесоса 100 включает корпус 101 робота-пылесоса, два электродвигателя 140, два ведущих колеса 110, два ведомых колеса 120, средство 130 для передачи движущей силы, сборный корпусной элемент 170 и амортизирующее устройство 150. Два ведущих колеса 110 служат опорой корпусу 101 робота-пылесоса относительно поверхности, подвергаемой чистке, и два электродвигателя 140 прикреплены к корпусу 101 робота-пылесоса и приводятся во вращение в направлении по часовой стрелке или в направлении против часовой стрелки независимо друг от друга с помощью источника питания. Кроме того, ведущие оси 111 присоединены к двум электродвигателям 140 с обеспечением соосности и приводятся во вращение в направлении по часовой стрелке или в направлении против часовой стрелки за счет вращения двух электродвигателей 140. Ведущие оси 111 проходят от ведущих колес 110, и соответствующие концы ведущих осей 111 присоединены к ведущим шкивам 113.
Два ведомых колеса 120 присоединены к корпусу 101 робота-пылесоса посредством ведомых осей 121. Каждое ведомое колесо 120 приводится во вращение совместно с ведущим колесом 110, и оба ведомых колеса 120 расположены с одной и той же стороны по отношению к ведущим колесам 110. Ведомые оси 121 также проходят от ведомых колес 120 наружу и присоединены к ведомым шкивам 123.
Средство 130 для передачи движущей силы обеспечивает передачу движущей силы, которая передается от двух электродвигателей 140 двум ведущим колесам 110, ведомым колесам 120. Средство 130 для передачи движущей силы включает синхронный ремень, расположенный на ведущих колесах 110 и ведомых колесах 120. Синхронный ремень соединяет ведущие колеса 110 и ведомые колеса 120 посредством шкивов 113 и 123, при этом оси 111 и 121 не выступают из ведущих колес 110 и ведомых колес 120 наружу и присоединены к шкивам 113 и 123. Кроме того, синхронный ремень может быть непосредственно расположен на открытых для воздействия частях осей 111 и 121 без использования шкивов 113 и 123, и в таком случае будет дополнительно предусмотрено средство для предотвращения отделения (непоказанное), предназначенное для предотвращения отделения синхронного ремня от осей 111 и 121.
Сборный корпусной элемент 170 включает верхний закрывающий элемент 171, первый нижний закрывающий элемент 175, расположенный у верхнего закрывающего элемента 171, и второй нижний закрывающий элемент 173, присоединенный к первому нижнему закрывающему элементу 175 и расположенный у верхнего закрывающего элемента 171. Сборный корпусной элемент 170 служит опорой ведущим колесам 110 и ведомым колесам 120 и расположен в корпусе 101 робота-пылесоса. Верхний закрывающий элемент 171 выполнен с кожухом 177 электродвигателя, проходящим от верхнего закрывающего элемента 171 вдоль осевого направления электродвигателя 140 и закрывающим сверху наружную окружную периферию электродвигателя 140. Сборный корпусной элемент 170 может быть изготовлен из легкого материала, такого как пластик. Верхний закрывающий элемент 171 также выполнен с опорным элементом 160, предназначенным для обеспечения опоры для амортизирующего устройства 150. Опорный элемент 160 имеет выполненное в нем отверстие 161. Амортизирующее устройство 150 прикреплено к верхнему закрывающему элементу 171 сборного корпусного элемента 170 и обеспечивает амортизацию удара. Первый нижний закрывающий элемент 175 имеет выступ 133, образованный на одной его боковой поверхности. Верхний закрывающий элемент 171 имеет выемку 135, предназначенную для обеспечения возможности поворота выступа 133 в ней вокруг оси ведущих колес 110. Выемка 135 соответствует выступу 133 и выполнена с дугообразной формой.
Соответственно в том случае, когда препятствие находится перед роботом-пылесосом 100, первый нижний закрывающий элемент 175 и второй нижний закрывающий элемент 173 поворачиваются вокруг оси 111 ведущего колеса 110 вместе с ведомыми колесами 120. Поворот ведомого колеса 120 ограничен глубиной выемки 135 верхнего закрывающего элемента 171. Верхний закрывающий элемент 171 надежно прикреплен к корпусу 101 робота-пылесоса. Амортизирующее устройство 150 расположено между верхним закрывающим элементом 171 и первым и вторым нижними закрывающими элементами 175 и 173.
Когда препятствие находится перед роботом-пылесосом 100, ведомые колеса 120 поворачиваются вверх вокруг оси 111 ведущих колес 110, и благодаря перемещению ведомых колес 120 вверх амортизирующее устройство 150 выполняет функцию амортизации ударов. По мере того, как робот-пылесос 100 перемещается через препятствие, ведомые колеса 120 перемещаются вниз к поверхности, подвергаемой чистке и противолежащей им. Соответственно амортизирующее устройство 150 поглощает шум и амортизирует удар, который имеет место, когда робот-пылесос 100 опускается на поверхность, подвергаемую чистке.
Электродвигатели 140 присоединены непосредственно к ведущим колесам 110 для обеспечения перемещения корпуса 101 робота-пылесоса. Вместо приводных электродвигателей 140, примененных здесь, могут быть использованы электродвигатели, имеющие шкивы для передачи вращения.
Ведущие колеса 110 и ведомые колеса 120 имеют наружные окружные периферии с пилообразными зубьями, так что, когда робот-пылесос 100 наталкивается на препятствие или когда робот-пылесос 100 входит в контакт с поверхностью, подвергаемой чистке, контактное усилие увеличивается, и робот-пылесос 100 перемещается через препятствие или перемещается по поверхности, подвергаемой чистке, стабильно без проскальзывания.
Фиг.4 представляет собой вид сбоку, показывающий основные части приводного устройства робота-пылесоса 100 согласно предпочтительному варианту осуществления настоящего изобретения. Ниже амортизирующее устройство 150 описано со ссылкой на фиг.4. Амортизирующее устройство 150 расположено в сборном корпусном элементе 170 и предназначено для амортизации удара, имеющего место, когда робот-пылесос 100 сталкивается с поверхностью, подвергаемой чистке. Амортизирующее устройство 150 включает верхний опорный элемент 153, нижний опорный элемент 155, соответствующий верхнему опорному элементу 153, упругий элемент 151, расположенный между верхним опорным элементом 153 и нижним опорным элементом 155. Цельная ось 157 проходит через упругий элемент 151, верхний опорный элемент 153 и нижний опорный элемент 155. В другом варианте осуществления упругий элемент 151 представляет собой цилиндрическую винтовую пружину.
Далее приводится описание работы приводного устройства 200 робота-пылесоса 100, выполненного с амортизирующим устройством 150, имеющим описанную выше конструкцию. Как показано на фиг.2-4, когда приводное устройство 200 приводит в действие два электродвигателя 140 в одном и том же направлении, ведущие колеса 120 вращаются в одном и том же направлении, и соответственно ведомые колеса 110 воспринимают движущую силу, передаваемую посредством синхронных ремней 130. В результате корпус 101 робота-пылесоса перемещается в заданные места за счет перемещения вперед или назад.
Когда два электродвигателя 140 приводятся в действие в разных направлениях, ведущие колеса приводятся во вращение в разных направлениях. Аналогично тому, как описано выше, ведомые колеса 120, воспринимающие движущую силу, передаваемую посредством синхронных ремней 130, следуют за ведущими колесами 110 для поворота корпуса 101 робота-пылесоса. Если препятствие, такое как дверной порог или ковер, находится перед роботом-пылесосом 100, ведомые колеса 120 поворачиваются вверх вокруг ведущей оси 111 ведущих колес 110, и амортизирующее устройство 150 выполняет функцию амортизации удара. По мере того, как робот-пылесос 100 перемещается через препятствие, ведомые колеса 120 поворачиваются вниз к противолежащей поверхности, подвергаемой чистке, так что амортизирующее устройство 150 поглощает шум и амортизирует удар, который имеет место, когда робот-пылесос 100 опускается на поверхность, подвергаемую чистке.
Первый нижний закрывающий элемент 175 и второй нижний закрывающий элемент 173 служат опорой при перемещениях ведомых колес 120 и амортизирующего устройства 150, расположенного в сборном корпусном элементе 170.
Ведомые колеса 120 перемещаются вверх или вниз вместе с первым нижним закрывающим элементом 175 и вторым нижним закрывающим элементом 173, в результате чего обеспечивается возможность плавного перемещения робота-пылесоса 100 через препятствие. Кроме того, поскольку удар амортизируется, робот-пылесос 100 "переезжает" через препятствие плавно, что обеспечивает уменьшение шума и удара.
Как описано выше, когда препятствие, такое как ковер или дверной порог, находится перед роботом-пылесосом 100, у пользователя возникает меньше неудобств, поскольку приводное устройство 200 позволяет роботу-пылесосу 100 плавно перемещаться через препятствие, и поскольку шум поглощается, и удар амортизируется.
Вышеприведенный вариант осуществления и преимущества представлены просто в качестве примера, и их не следует рассматривать как ограничивающие настоящее изобретение. Предусмотрено, что описание настоящего изобретения имеет иллюстративный характер и не предназначено для ограничения объема притязаний формулы изобретения. Для специалистов в данной области техники очевидны многие альтернативы, модификации и варианты. В формуле изобретения части формулы изобретения "средство плюс функция" предназначены для того, чтобы защищать конструкции, описанные здесь как выполняющие указанную функцию, и не только структурные эквиваленты, но также и эквивалентные конструкции.
Реферат
Изобретение относится к области робототехнической техники, в частности чистящего устройства (робота-пылесоса). Приводное устройство включает корпус робота-пылесоса и два электродвигателя, расположенных в корпусе робота-пылесоса, которые приводятся в действие с помощью соответствующих источников питания. Приводное устройство также включает два ведущих колеса, приводимых во вращение с помощью двух электродвигателей, два ведомых колеса, следующих за двумя ведущими колесами, и средство для передачи движущей силы, которое заставляет ведущие колеса и ведомые колеса двигаться совместно друг с другом. Устройство содержит сборный корпусной элемент, расположенный в корпусе робота-пылесоса и предназначенный для опоры двух ведущих колес и двух ведомых колес, и амортизирующее устройство, расположенное в сборном корпусном элементе и предназначенное для амортизации удара, который имеет место из-за воздействия со стороны поверхности, подвергаемой чистке. Технический результат - плавное перемещение через препятствие, такое как ковер или дверной порог и зону, подвергаемую очистке, не создавая шума, а также предотвращение ударов при перемещении через препятствие. 11 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Автоматический пылесос с двумя жидкостными фильтрами, используемый для сухой и влажной уборки помещения - пылесос "бакри"
Комментарии