Пылесос - RU2121288C1
Код документа: RU2121288C1
Чертежи
Описание
Настоящее изобретение относится к пылесосам и, в частности, к дистанционно управляемому, автоматически перемещающемуся пылесосу, содержащему корпус, который свободно перемещается вперед, назад, влево и вправо дистанционным управлением, для осуществления уборки помещения.
Обычно пылесос осуществляет уборку помещения с помощью двигателя, расположенного внутри его корпуса, который создает всасывающее усилие чтобы собрать "плавающие" инородные вещества, такие, как пыль, на полу помещения.
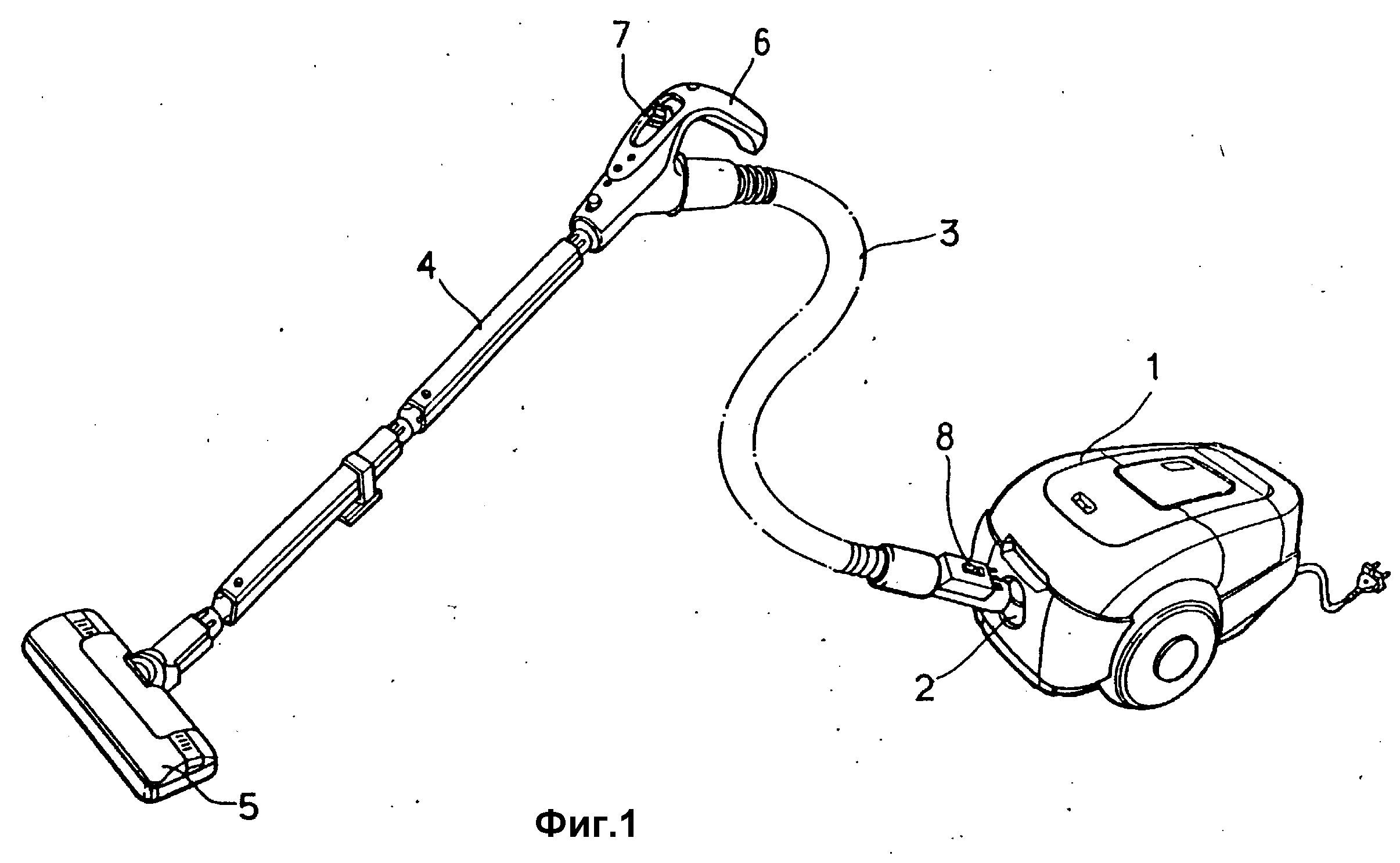
На фиг. 1 показан вид с изометрии обычного пылесоса. Пылесос содержит корпус 1, в котором расположен двигатель, соединительный шланг 3, соединительную трубку 4 и всасыватель 5. Корпус 1 имеет отверстие 2, выполненное в его передней поверхности, в которое вставляется конец соединительного шланга 3, и электрический соединитель 8. Между соединительным шлангом 3 и соединительной трубой 4 расположена ручка 6, имеющая в верхней части выключатель 7, переключаемый пользователем для управления приводом пылесоса. Ручка 6 выполнена полой для обеспечения прохождения через нее пыли. Соединительная труба 4, выполненная из упрочненных материалов, таких, как пластик и т.п., состоит из нескольких разделяющихся или складывающихся относительно друг друга частей, чтобы обеспечить хранение или перемещение пылесоса. Всасыватель 5 закрепляется на переднем конце соединительной трубы 4.
Пылесос работает следующим образом. Когда пользователь включает выключатель 7, приводится во вращение двигатель, чтобы создать всасывающее усилие, при этом всасыватель 5 плотно прижимают к полу помещения, чтобы обеспечить засасывание "плавающих" посторонних веществ, таких, как пыль, вместе с воздухом. Пыль и воздух, проходя через соединительную трубу 4 и соединительный шланг 3, поступает в корпус 1, в котором пыль улавливается собирающим фильтром (не показан), воздух выпускается наружу. Таким образом осуществляется уборка помещения (комнаты). При уборке пользователь перемещает всасыватель 5 вперед, назад, влево и вправо, чтобы очистить помещение в разных его местах, при этом одновременно перемещается и корпус 1.
Однако, при работе с таким пылесосом пользователь должен держать ручку 6, а также перемещать всасыватель 5 и подтягивать соединительный шланг 3, если это требуется. Это доставляет много неудобств для пользователя, поскольку во время уборки он использует обе руки. Пылесос не может свободно перемещать всасыватель 5, что приводит к снижению эффективности уборки. Если пользователем является женщина, ухаживающая за ребенком, старый человек или человек с физическими недостатками, то пользование таким пылесосом значительно ограничивается.
Таким пылесосом, например, является пылесос по Патенту США No. 4306329. Устройство содержит корпус с расположенным в нем двигателем, лопастным колесом и собирающим фильтром, колеса, установленные на корпусе с возможностью вращения и контактирующие с очищаемой поверхностью, всасыватель, размещенный с расположением его всасывающего отверстия на дне корпуса для всасывания пыли со стороны дна корпуса, ручку с участком переключателя для приведения в действие двигателя и создания всасывающей силы, средство перемещения корпуса вперед, назад и влево, вправо, включающее приводное движущее устройство содержащее двигатель для вращения колес с перемещением корпуса вперед и назад, и средство дистанционного управления средством перемещения корпуса. Данному устройству также свойственны вышеуказанные недостатки.
В основу изобретения положена задача создания пылесоса, который за счет особенностей расположения всасывателя и за счет наличия средства перемещения корпуса и его дистанционного управления позволял бы по существу полностью автоматизировать уборку помещения.
Данная задача решается посредством пылесоса, содержащего корпус с расположенным в нем двигателем, лопастным колесом и собирающим фильтром, колеса, установленные на корпусе с возможностью вращения и контактирующие с очищаемой поверхностью, всасыватель, размещенный с расположением его всасывающего отверстия на дне корпуса для всасывания пыли со стороны дна корпуса, ручку с участком переключателя для приведения в действие двигателя и создания всасывающей силы, средство перемещения корпуса вперед, назад и влево, вправо, включающее приводное движущее устройство, содержащее двигатель для вращения колес с перемещением корпуса вперед назад, и средство дистанционного управления средством перемещения корпуса, который, согласно изобретению, включает приводное устройство изменения направления движения с перемещением корпуса влево и вправо, содержащее двигатель, а средство дистанционного управления средством перемещения корпуса выполнено в виде дистанционного контроллера, включающего регулятор и размещенный на корпусе приемник.
Предпочтительно, чтобы корпус содержал по меньшей мере одну роликовую щетку, закрепленную на его дне с возможностью вращения, для улучшения эффекта очистки.
Целесообразно, чтобы приводное движущее устройство содержало по меньшей мере одну замедляющую зубчатую передачу для передачи замедленной вращающей силы двигателя на колеса.
Желательно, чтобы приводное устройство изменения направления движения содержало вращающийся элемент, выполненный с возможностью вращения влево и вправо в соответствии с вращением его двигателя вперед и в обратном направлении, по меньшей мере одну тягу и кронштейн, выполненные с возможностью возвратно-поступательного перемещения влево и вправо в соответствии с вращением вращающегося элемента и по меньшей мере один дополнительный кронштейн, закрепленный напротив первого кронштейна, для поддерживания приводного устройства изменения направления движения.
Возможно, чтобы дистанционный контроллер включал контроллер, использующий беспроводную связь, проводную связь или ультрафиолетовые лучи.
Ниже изобретение подробно описывается со ссылками на
прилагаемые чертежи, на которых:
на фиг. 1
показан вид в изометрии обычного пылесоса, выполненного с возможностью приспосабливания к изобретению;
на фиг. 2 - вид сбоку корпуса
дистанционно управляемого, автоматически перемещающегося
пылесоса согласно изобретению;
на фиг. 3 - вид корпуса в разрезе, сделанном рядом с его дном;
на фиг. 4 - роликовые щетки и
приводное устройство для изменения направления движения
корпуса согласно изобретению, вид снизу;
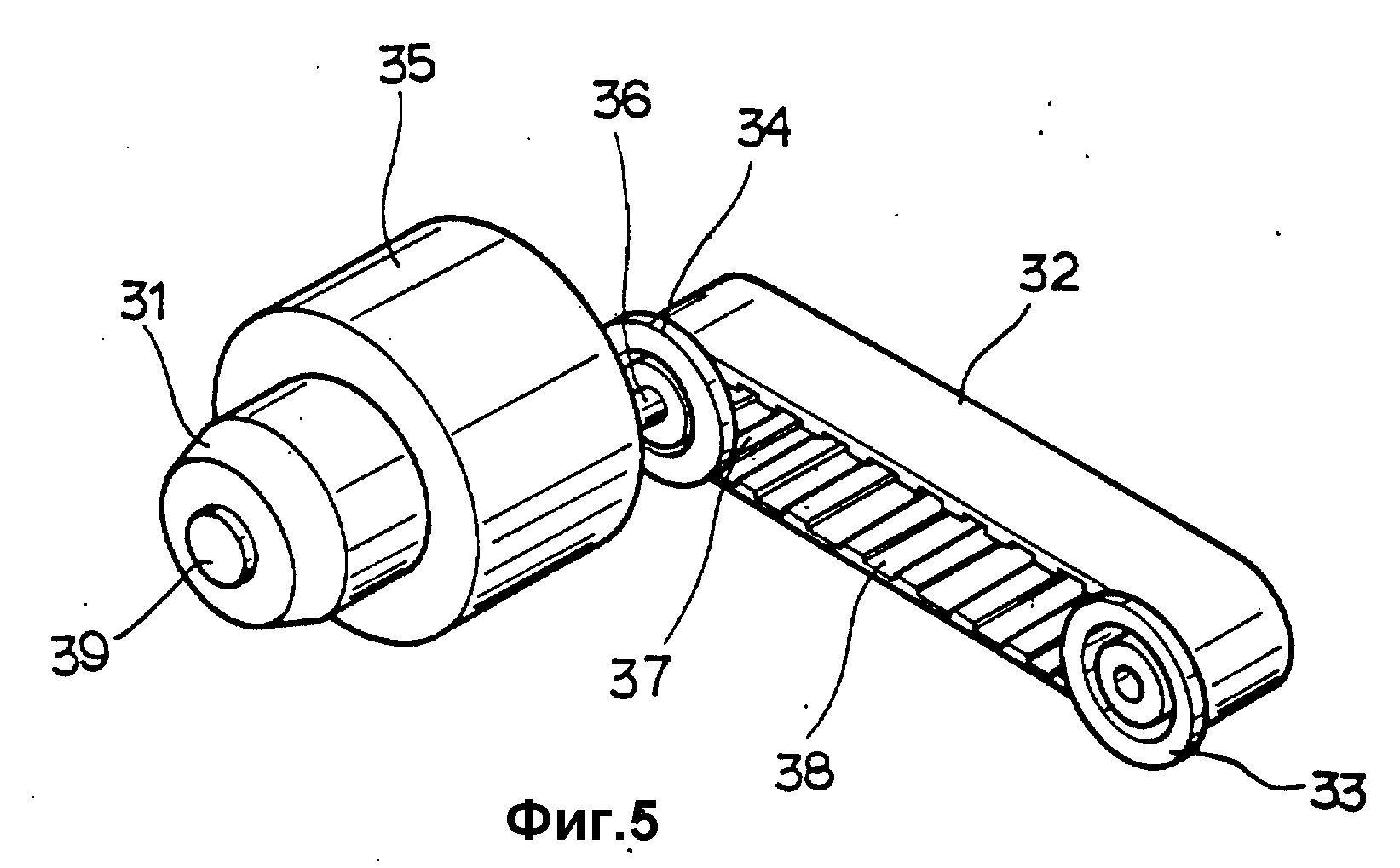
на фиг. 5 - вид в изометрии приводного движущего устройства согласно одному варианту
осуществления изобретения;
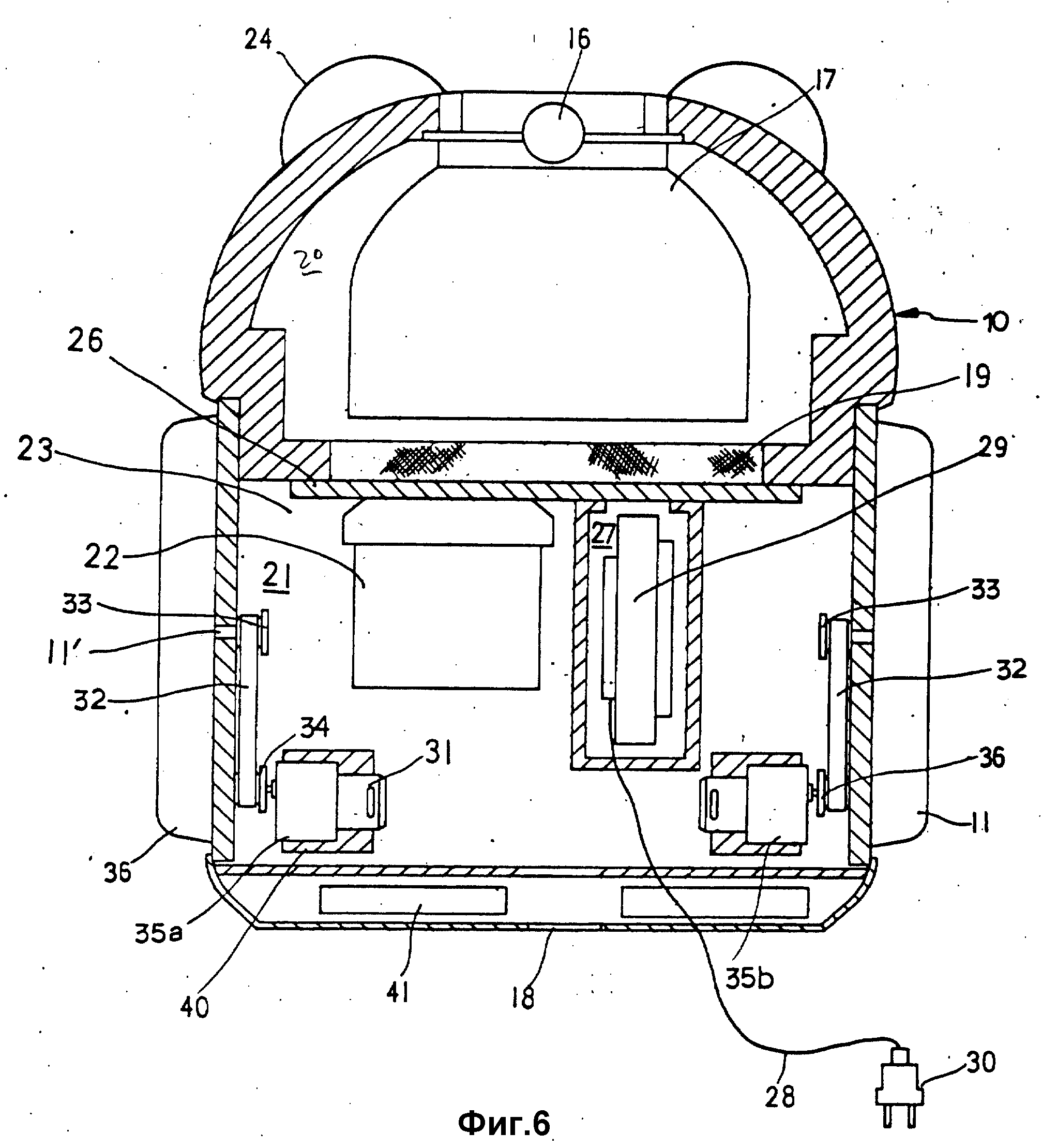
на фиг. 6 - поперечный разрез,
показывающий расположение приводного движущего устройства согласно другому варианту осуществления изобретения;
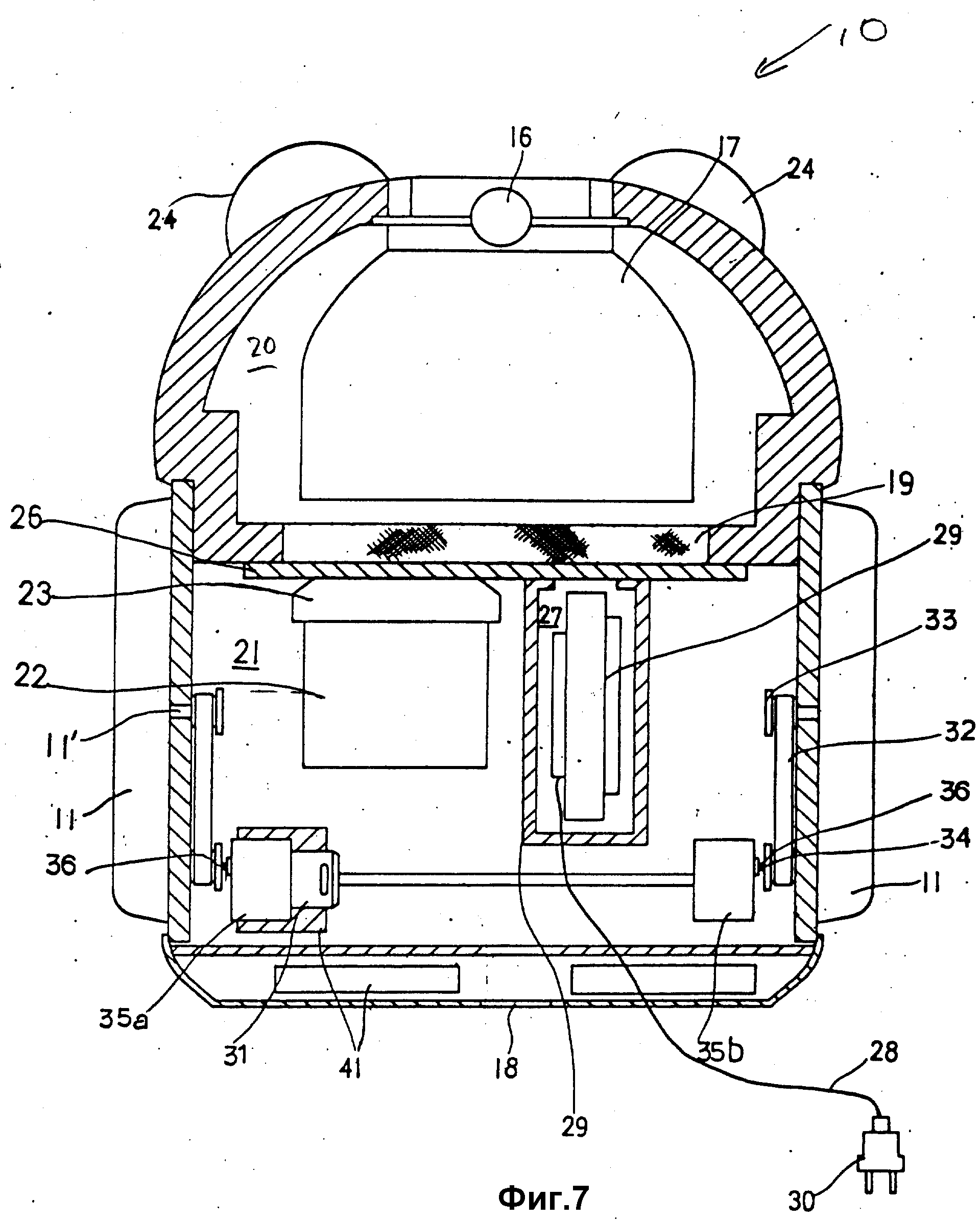
на фиг. 7
- вид в разрезе, показывающий расположение приводного движущего
устройства согласно еще одному варианту осуществления изобретения;
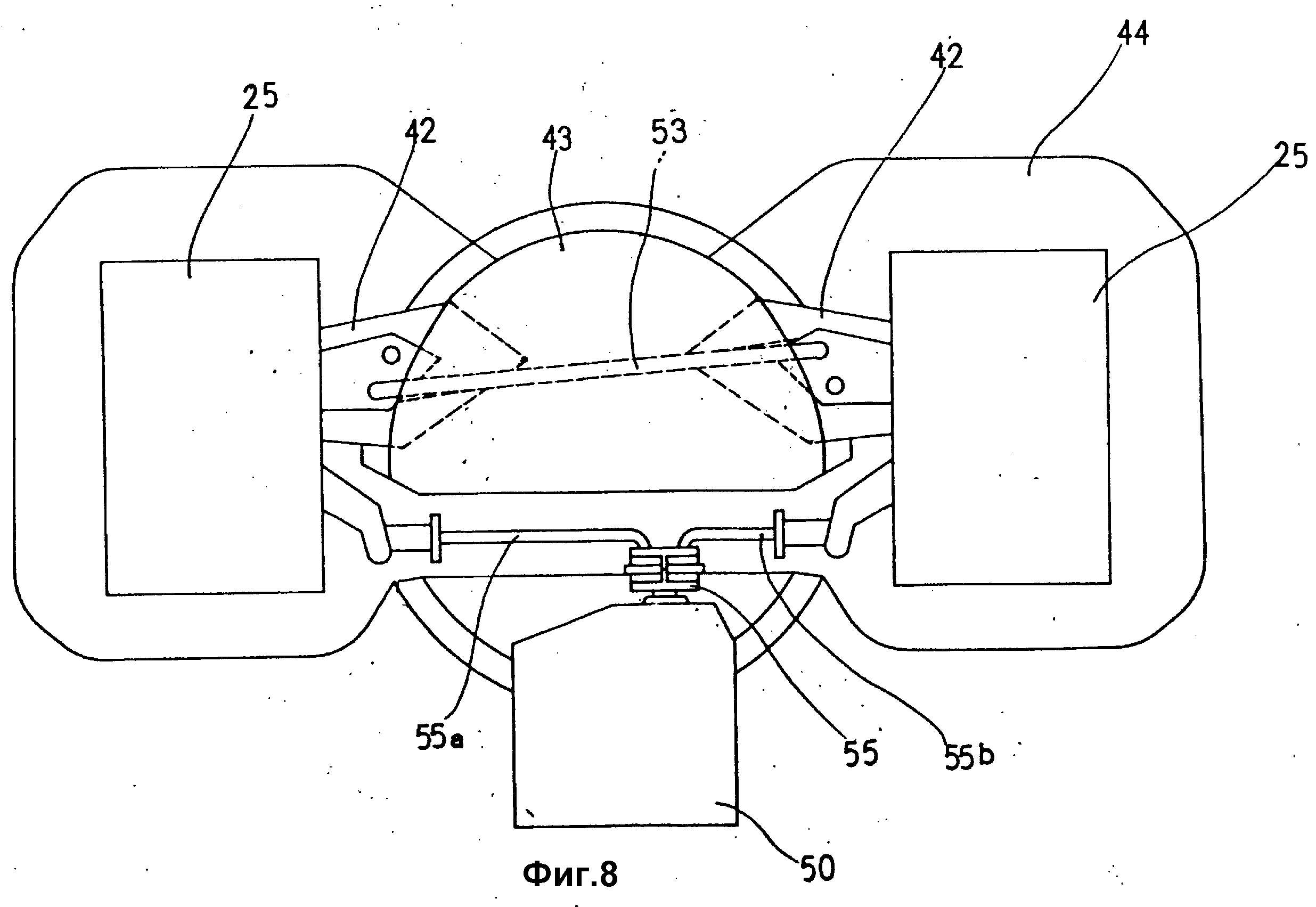
на фиг. 8 - вид в разрезе приводного устройства для
изменения направления движения корпуса согласно изобретению;
на
фиг. 9 - вид в изометрии приводного устройства для изменения направления движения корпуса согласно изобретению;
на
фиг. 10 - вид сверху беспроводного контроллера согласно одному варианту
осуществления изобретения.
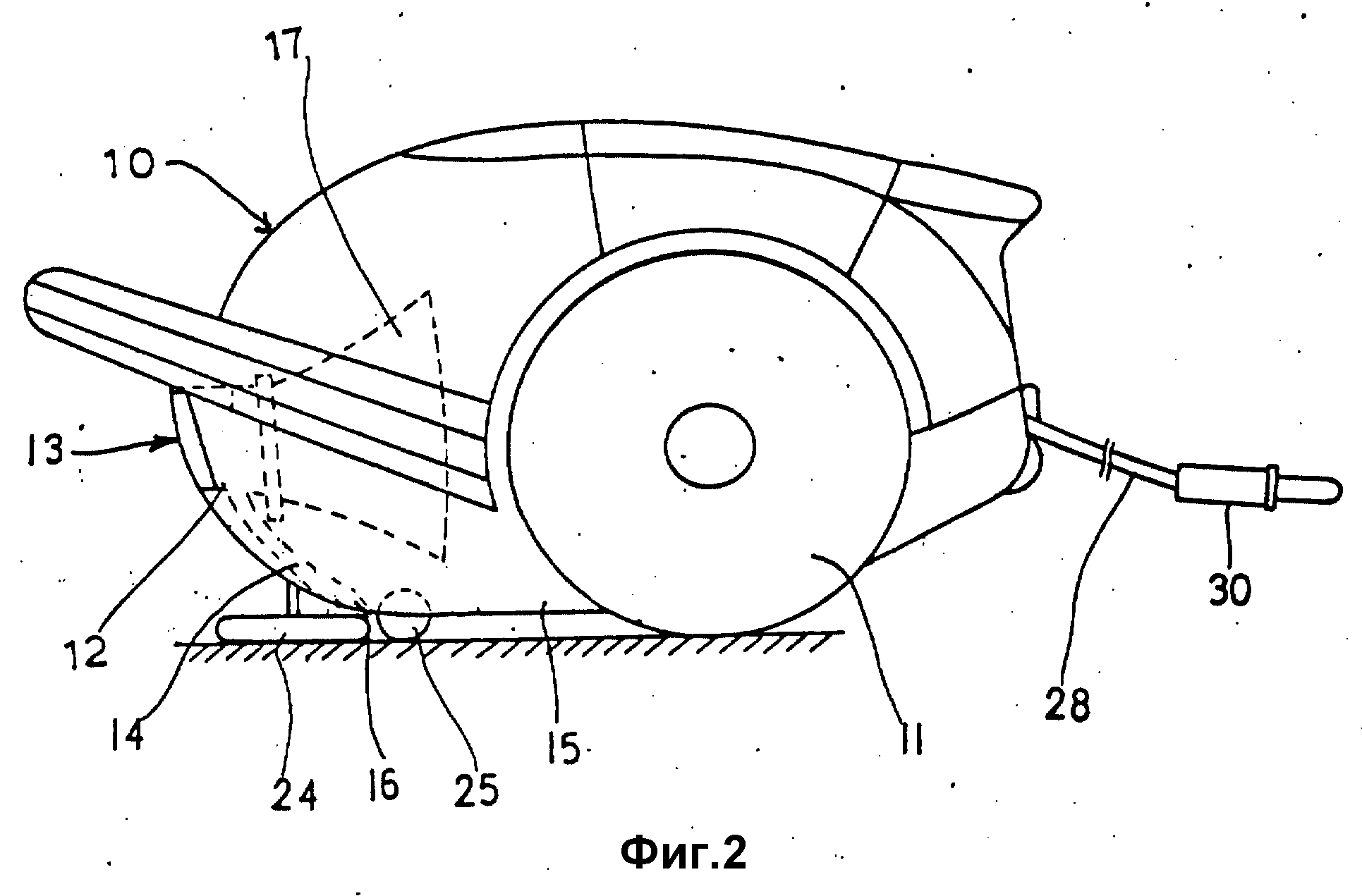
Как показано на фиг. 2 и 3, корпус 10 имеет колеса большего диаметра 11, закрепленные с двух его боковых сторон с возможностью поворота, входное отверстие 12, выполненное в его нижней части, в которое вставляется соединительный шланг (не показан), крышку 13, закрывающую входное отверстие 12, когда уборку помещения (комнаты) осуществляют с помощью корпуса 10, всасывающее отверстие 16, выполненное в его нижней поверхности (дне) и соединенное с криволинейным каналом 14, проходящим вниз вблизи отверстий 12, через который пыль поступает в корпус от всасывающего отверстия 16, и выпускное отверстие 18, выполненное в его задней поверхности, через которое воздух выпускается из корпуса наружу. Корпус имеет также два колеса меньшего диаметра 25, расположенные рядом с всасывающим отверстием 16, для изменения направления перемещения корпуса, как это подробно описывается ниже.
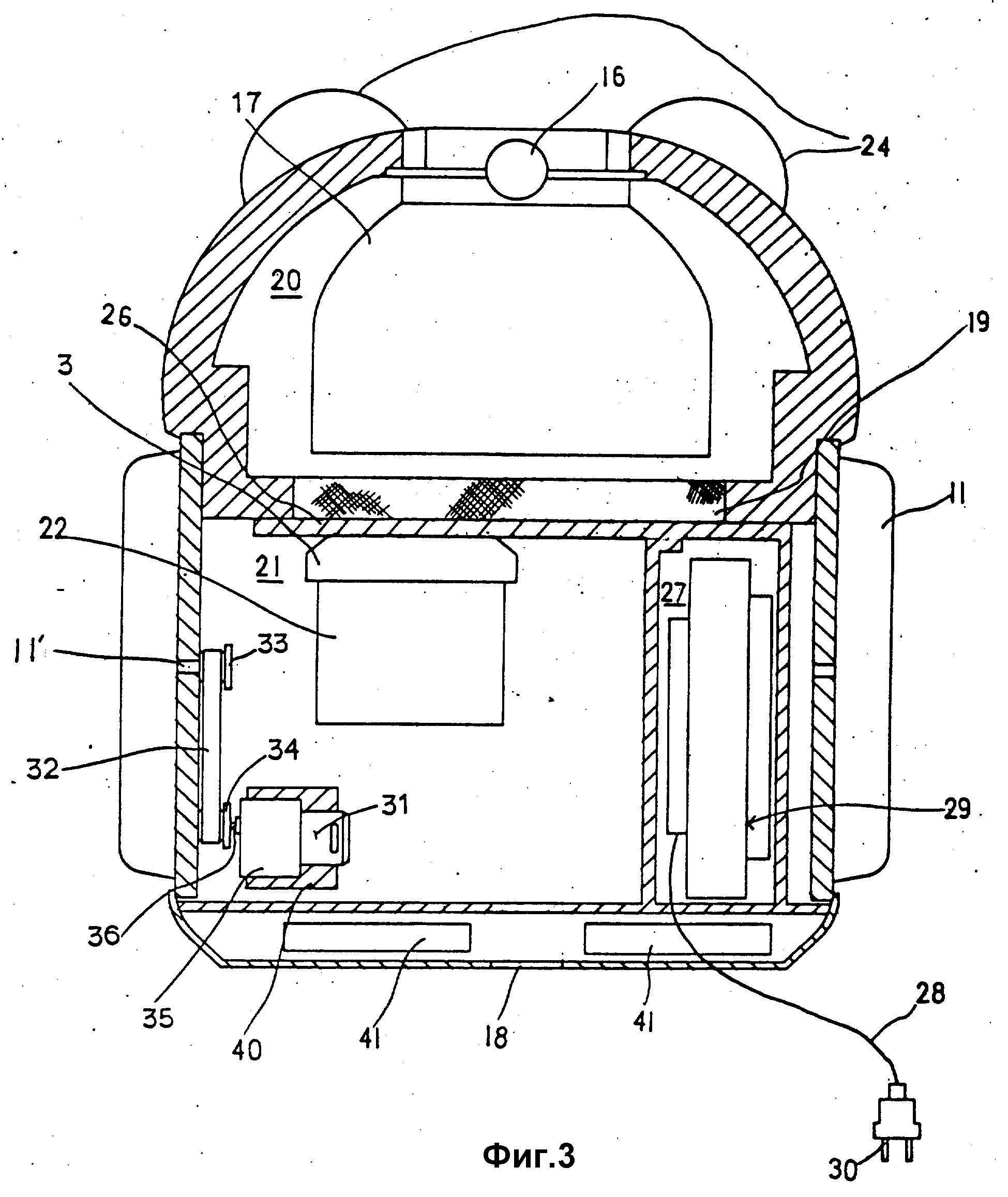
Внутри корпуса 10 установлены промежуточный фильтр 19 и нижняя перегородка 26, расположенная рядом с последним, которая разделяет корпус на накопительную камеру 20 для сбора пыли и механическую камеру 21, в которой расположены элементы, создающие всасывающую силу. В накопительной камере 20 рядом с всасывающим каналом 14 расположен собирающий фильтр 17 для улавливания пыли. В механической камере 21 расположены двигатель 22 и лопастное колесо 23, которые создают всасывающую силу. Иначе говоря, лопастное колесо 23 прикреплено к перегородке 26, а двигатель 22 - к нижней поверхности 15 и соединен с задней частью лопастного колеса 23. Двигатель 22 вращает лопастное колесо 23, чтобы создать давление в накопительной камере 20 и, таким образом, засосать пыль. Механическая камера 21 имеет отсек 27, в котором расположено намоточное устройство 29 для сматывания или наматывания сетевого шнура 28 с вилкой 30. На задней поверхности корпуса 10 установлен приемник 41, образующий часть дистанционного контроллера для управления свободным перемещением корпуса 10. С обеих сторон от всасывающего отверстия 16 расположены свободно вращающиеся роликовые щетки 24 для перемещения к всасывающему отверстию пыли, находящейся недалеко от этого отверстия или в месте, недоступном для него. Следует отметить, что роликовые щетки могут вращаться с помощью двигателя (не показан).
В соответствии с описываемым вариантом осуществления изобретения приводное движущее устройство вращает только одно колесо 11, однако, если колеса спаренные, то это устройство может вращать одновременно оба колеса 11 так же, как и в других вариантах осуществления изобретения, показанных на фиг. 6 и 7. В соответствии с описываемым вариантом осуществления изобретения в камере 21 имеется только одно приводное движущее устройство для вращения только одного колеса 11.
Как показано на фиг. 3 и 5, приводное движущее устройство содержит электродвигатель постоянного тока 31 для передачи вращающей силы на колесо 11. С валом 39 электродвигателя постоянного тока 31 соединена замедляющая зубчатая передача (редуктор) 35. На валу 36 замедляющей зубчатой передачи 35 и оси 111 колеса 11 закреплены соответственно блоки 34 и 33. На наружной периферии блоков 33 и 34 выполнены зубья 37, а на внутренней периферии ремня 32 канавки 38, в которые входят зубья 37, так что при вращении вала электродвигателя постоянного тока 31 вращающая сила передается на колесо 11. В этом примере электродвигатель постоянного тока 31 закреплен на нижней поверхности 15 с помощью зажимного приспособления 40.
В другом варианте осуществления изобретения, показанном на фиг. 6, пылесос имеет дополнительное приводное движущее устройство для вращения второго колеса 11 пары колес, показанной на фиг. 3. Дополнительное приводное движущее устройство в данном случае не описывается, поскольку оно аналогично приводному движущему устройству, описанному выше. В еще одном варианте осуществления изобретения, показанном на фиг. 7, приводное движущее устройство для одновременного вращения пары колес 11 содержит только один электродвигатель постоянного тока 31, вращающийся вал 39 которого выступает из обеих его боковых сторон. С концами этого вала соединены соответственно замедляющие зубчатые передачи 35a и 35b. Валы 36 замедляющих зубчатых передач 35a и 35b проходят к боковой поверхности корпуса 10. На концах валов 36 и оси 111 закреплены соответственно блоки 34 и 33 для вращательного взаимодействия с ними. На блоках 33 и 34 имеются ремни 32 для взаимодействия блоков друг с другом. Посредством этого при вращении вала электродвигателя постоянного тока 31 вращающая сила передается на колеса 11.
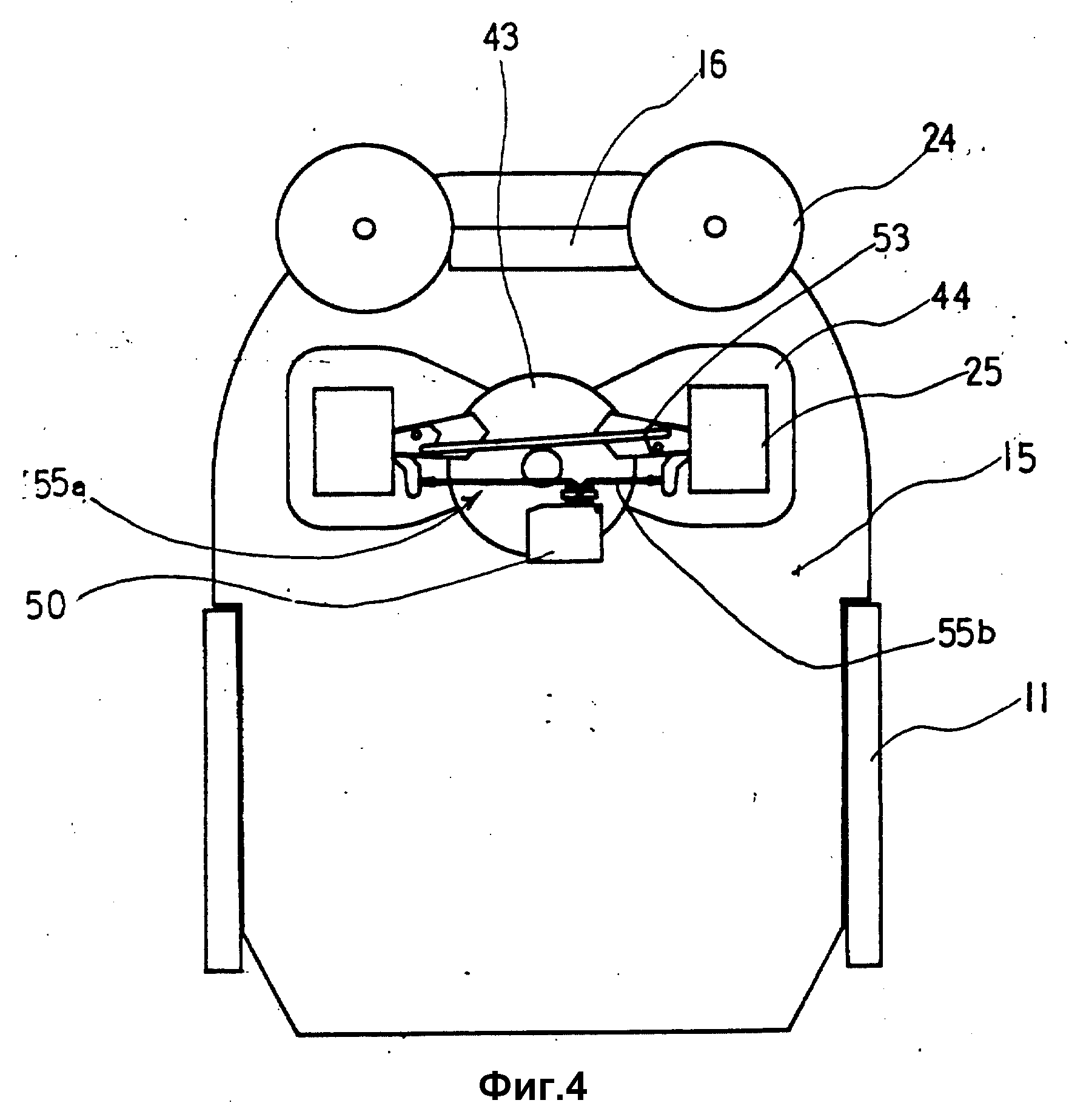
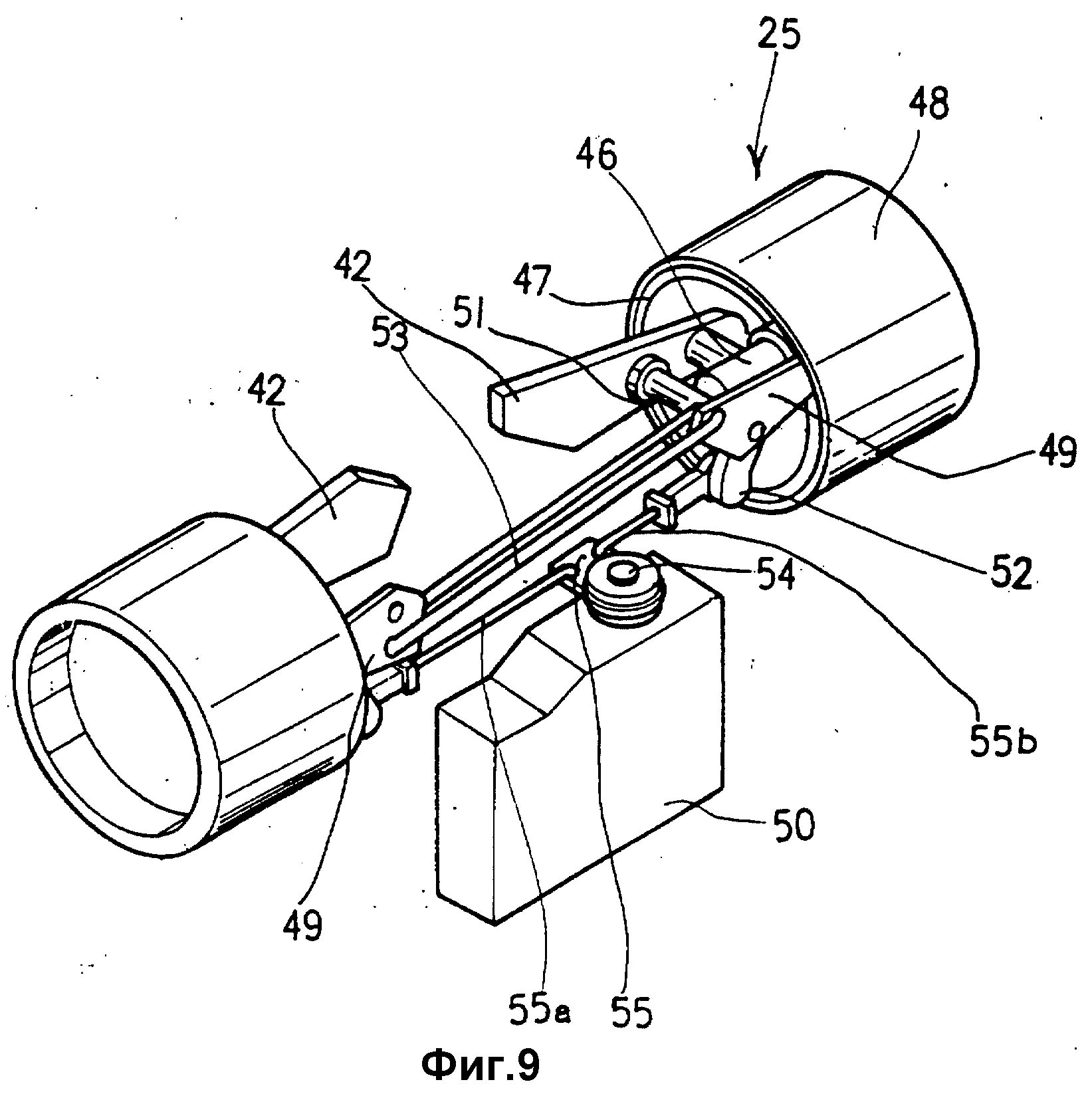
Как показано на фиг. 4, 8 и 9, на нижней поверхности 15 накопительной камеры 20 закреплено приводное устройство для изменения направления движения корпуса. Для этого в центре нижней поверхности 15 закреплен участок 44 фиксации колес 43 круглой формы, расположенный на небольшой высоте от этой поверхности. В участке 43 фиксации колес расположены одни концы несущих кронштейнов 42, которые поддерживают колеса 25 и приводное устройство для изменения направления движения корпуса 10. Нижняя поверхность 15 имеет установочный вырез 44 для размещения колес 25 и элементов для изменения направления колес 25, при этом последние проходят через вырез 44 и опираются на землю.
Приводное устройство для изменения направления движения корпуса содержит двигатель 50 для передачи вращающей силы на колеса 25. Каждое колесо 25 имеет внутреннюю и наружную периферийные части 47 и 48, из которых внутренняя периферийная часть 47 не вращается, а наружная периферийная часть 48 свободно вращается относительно нее. Внутренняя периферийная часть 47 имеет ось 46. Кронштейны 42 и 49 прикреплены друг к другу в эксцентричных точках колес 25 посредством оси 46 на периферийной части 47, причем другие концы кронштейнов поддерживаются по отношению друг к другу посредством опорного стержня 51. Кронштейн 49 имеет поддерживающий элемент 52 и поддерживающий элемент 53. Оба кронштейна 49 соединены между собой с помощью поддерживающего элемента 53 для поддержания постоянного расстояния между колесами 25 и обеспечения одновременного поворота колес 25. С поддерживающими элементами 52 соединены одни концы тяг 55a и 55b, другие концы которых прикреплены к элементу 55, который вращается с помощью вала 54 двигателя 50. Двигатель 50 установлен на участке 43 фиксации колес, к которому прикреплены колеса 25. Таким образом, посредством расположения кронштейном 42 в участке 43 фиксации колес и колес 25 в вырезе 44 приводное устройство для изменения направления движения закрепляется на нижней поверхности 15.
В соответствии с принципом изобретения приводное движущее устройство и приводное устройство для изменения направления движения обеспечивают перемещение корпуса вперед, назад, влево и вправо посредством управления вращением их двигателей. С этой целью, в соответствии с изобретением, может быть применен дистанционный контроллер, использующий источник ультрафиолетового излучения, беспроводной или проводной передатчик и приемник 41, известный в технике как устройство управления, для управления двигателями движущего устройства и устройства для изменения направления движения по отдельности или одновременно.
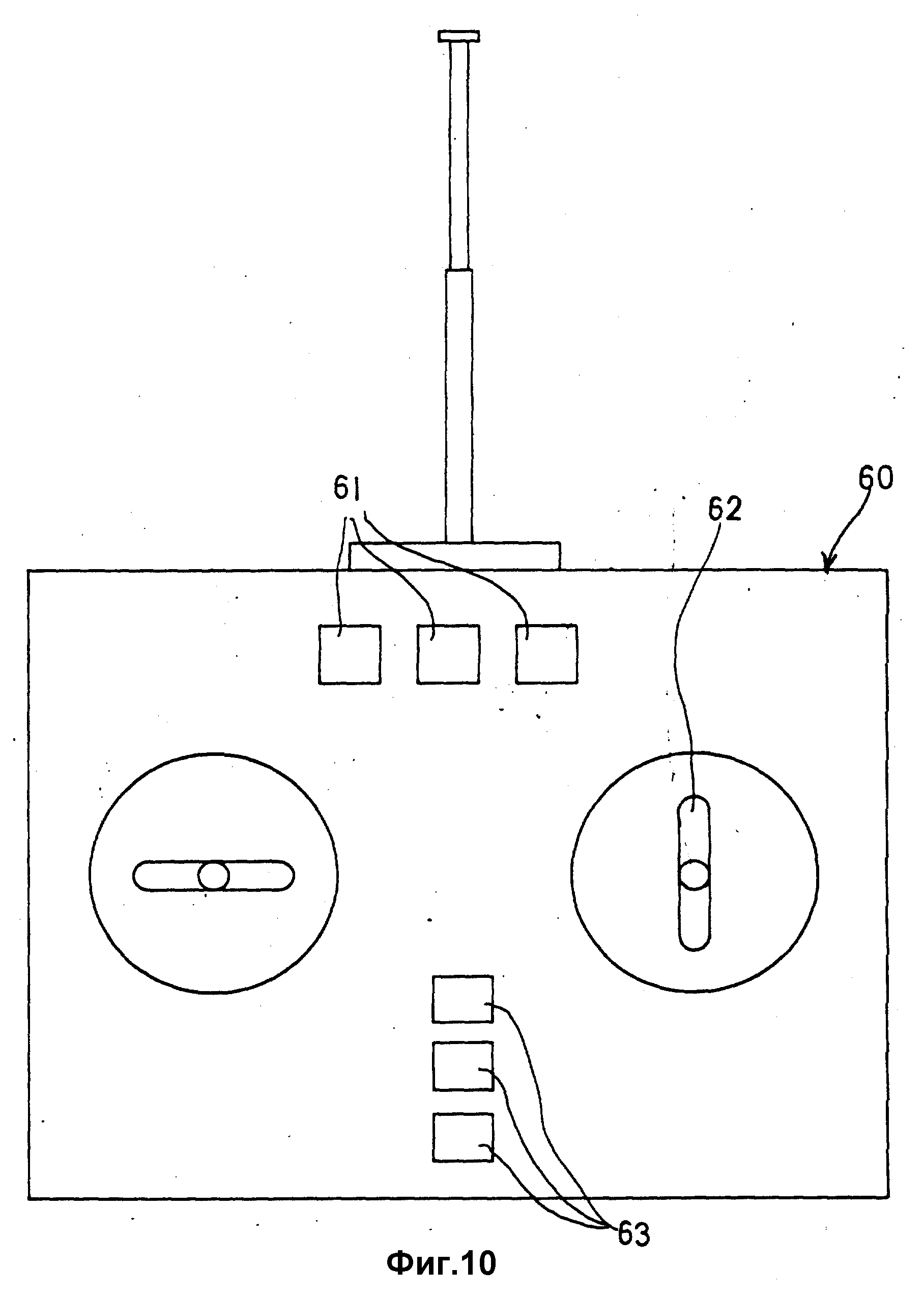
В данном случае для управления свободным перемещением корпуса используется беспроводной регулятор 60. Беспроводной регулятор 60 содержит элементы ввода, посредством которых пользователь подает команды на перемещение корпуса вперед, назад, влево и вправо. Например, он имеет несколько клавиш 61 для управления перемещением корпуса 10 вперед и назад за счет вращения вала электродвигателя постоянного тока 31 вперед и в обратном направлении, клавиши 62 для управления изменением направления движения корпуса 10 за счет вращения вала двигателя 50 вперед и в обратном направлении и клавиши 63 для переключения двигателя 22 на любой один из трех режимов работы для создания соответственно небольшой, средней и большой всасывающей силы при уборке помещения.
Беспроводной регулятор 60 передает сигналы управления, вырабатываемые при нажатии на выбранные клавиши, на приемник 41. Последний управляет упомянутыми двигателями, так что пылесос осуществляет уборку. Хотя устройства приемника 41 и беспроводного регулятора 60 содержатся в формуле изобретения, чтобы защитить права заявителя, и могут быть легко реализованы, но их описание опущено.
Как было описано выше, изобретение управляет работой двигателя 22, создающего всасывающую силу, двигателя 31 для перемещения корпуса вперед и назад и двигателя 50 для изменения направления движения корпуса, чтобы убрать повышение. Иначе говоря, двигатель 22 вращает лопастное колесо 23 в ответ на сигнал управления, чтобы создать всасывающую силу для засасывания пыли из всасывающего отверстия 16. Засасываемая пыль улавливается собирающим фильтром 17, расположенным в накопительной камере 20, а воздух выпускается из корпуса наружу. Двигатель 31 приводится во вращение в ответ на сигнал управления, так что он передает вращающую силу через блоки и ремни на колеса, чтобы переместить корпус вперед и назад. Двигатель 50 приводится во вращение вперед или в обратном направлении в ответ на сигнал управления, так что вращающийся элемент 55 перемещает тяги 55a и 55b в соответствующем направлении, чтобы изменить направление движения корпуса 10, влево или вправо.
Соответственно, изобретение управляет системой для улучшения удобства пользования пылесосом при уборке помещения с использованием всасывающей насадки или только корпуса. Изобретение позволяет управлять свободным перемещением корпуса на расстоянии, вследствие чего повышается эффективность уборки. Такой пылесос очень удобен при уборке комнаты.
Реферат
Дистанционно управляемый автоматически перемещающийся пылесос содержит корпус, имеющий отдельное всасывающее отверстие для засасывания пыли, приводное движущее устройство для перемещения корпуса вперед и назад, приводное устройство для изменения направления движения корпуса, так что он может перемещаться влево и вправо, и контроллер для управления этими устройствами, использующий ультрафиолетовые лучи или проводную и беспроводную связь для свободного перемещения корпуса. Изобретение позволяет управлять свободным перемещением корпуса пылесоса на расстоянии, вследствии чего повышается удобство и эффективность уборки комнаты. 4 з.п.ф-лы, 10 ил.
Комментарии