Уборочный комбайн, содержащий систему управления соломотрясом - RU2603725C1
Код документа: RU2603725C1
Чертежи





Описание
Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к уборочному комбайну, содержащему соломотряс, который может работать с регулируемой частотой качания.
Уровень техники
Когда уборочный комбайн с соломотрясом, который работает с фиксированной частотой качания, движется в гору, вследствие этого, скорость перемещения сельскохозяйственной культуры на соломотрясе будет увеличиваться, приводя к риску повышенной потери зерна, так как сокращается время, в течение которого растительный материал обрабатывается с помощью соломотряса. Когда подобный уборочный комбайн движется под гору, скорость перемещения сельскохозяйственной культуры на соломотрясе будет снижаться, и будет происходить уменьшение пропускной способности, а также риска образования пробок, так как затрачивается больше времени на прохождение растительного материала по соломотрясу, потому что слой растительного материала на соломотрясе будет становиться слишком толстым, что также не оптимально для отделения зерна и может таким образом также приводить к увеличению потерь зерна.
M. Gubsch, «Der Einfluss der Langsneigung auf das Abscheidungs- und Forderverhalten des Strohschuttlers», Archiv der Landtechnik Band 8 (1969), часть 2/3, страницы 127-139, предлагает изменить частоту качания соломотряса в зависимости от продольного наклона уборочного комбайна для того, чтобы противодействовать результату продольного наклона. Однако не был предложен вариант осуществления системы привода подобного соломотряса и связанной с ней системы управления.
В EP1584225 предложены система привода соломотряса и связанная с ним система управления, которая предоставляла возможность регулирования частоты качания, а также шаг качания системы привода соломотряса. Однако подобный уборочный комбайн требует промежуточную раму, которая усложняет конструкцию системы привода соломотряса и делает почти невозможной модификацию существующего уборочного комбайна с помощью подобной системы. Кроме того, в системе управления используется корреляция между пропускной способностью растительного материала и оптимальной скоростью перемещения для данной конкретной пропускной способностью растительного материала. Для оценки пропускной способности растительного материала существуют необходимые датчики пропускной способности, которые оценивают количество растительного материала, которое обрабатывается уборочным комбайном в течение заданного временного периода. Было обнаружено, что подобная система управления не является оптимальной, так как у нее отсутствует необходимая точность, потому что сигнал, предоставляемый датчиками пропускной способности, имеет большие помехи. Кроме того, некоторые варианты осуществления данных датчиков требуют, чтобы датчики были расположены в непосредственной близости к потоку сельскохозяйственной культуры, который подвергает их воздействию неблагоприятных рабочих условий, включая продолжительный контакт с грязью, влажностью, пылью и т.д., еще больше снижая долгосрочную надежность измерений данных датчиков пропускной способности. Также было обнаружено, что чувствительность системы управления в некоторых обстоятельствах может быть слишком низкой, главным образом по причине инерции системы привода соломотряса и того факта, что датчики пропускной способности измеряют пропускную способность растительного материала, когда он уже обрабатывается уборочным комбайном. Таким образом, система управления соломотрясом может быть неспособна эффективно справляться с такими неожиданными изменениями пропускной способности, которые происходят, например, когда комбайн проходит мимо самой низкой точки долины, где его продольный наклон быстро изменяется с уклона вниз на уклон вверх. Датчики пропускной способности, расположенные в подающем механизме, даже не заметят подобное изменение, если комбайн сохраняет движение с той же самой скоростью, так как количество поступающего растительного материала в жатке и подающем механизме заметно не изменится. Однако данное изменение продольного наклона мгновенно увеличит скорость перемещения растительного материала на соломотрясе, что в конечном итоге может стать причиной повышенной потери зерна или пробки. Хотя данные изменения могут быть обнаружены с вариантами осуществления датчиков пропускной способности, которые измеряют толщину слоя растительного материала на соломотрясе, или датчиков потери зерна, расположенных в конце соломотряса, подобная оценка будет сделана, только когда результат четко доступен уже на уровне соломотряса и в случае датчика потери зерна в конце соломотряса. Поэтому дополнительно принимая в расчет задержку, вызванную инерцией качания соломотряса, подобная система управления не будет способна своевременно справляться с подобными неожиданными изменениями, а, кроме того, подобные задержки будут вызывать значительное отклонение системы управления от оптимального заданного режима и существенно выходить за его пределы в течение временного периода вслед за подобными изменениями.
В DE102005050751 показана дополнительная система привода соломотряса с регулируемой частотой качания. Данная система привода соломотряса не требует промежуточной рамы и задействует в системе привода соломотряса ременной вариатор, который значительно упрощает конструкцию. Однако она все-таки остается громоздкой для модернизированной установки подобной системы на существующий уборочный комбайн, так как это требует по меньшей мере замены шкива, который установлен на коленчатом валу системы привода соломотряса уборочного комбайна, ременным вариатором. Данная операция является сложной и требует громоздкой конструкции ременного вариатора. Дополнительно, система управления приводом соломотряса требует использования датчиков, которые оценивают скорость перемещения сельскохозяйственной культуры на соломотрясе в процессе работы. Подобных датчиков, как правило, нет в наличии на существующих уборочных комбайнах, и таким образом это приводит к большим модификациям системы управления уборочного комбайна для того, чтобы соединить с подобными датчиками. Кроме того, подобные датчики работают в крайне суровых условиях, которые влияют на их надежность и точность. Вдобавок ко всему, данные датчики, оценивающие скорость перемещения, расположены на высоте соломотряса, и в данном случае результат также будет обнаружен, только когда он уже явно виден на соломотрясе, что, принимая в расчет задержку, вызванную инерцией качания соломотряса, будет приводить к отклонению от оптимального заданного значения и перегрузке, особенно в случае неожиданного изменения продольного наклона комбайна, как объяснялось выше. Дополнительно, система управления направлена на достижение постоянной скорости перемещения для растительного материала на соломотрясе. Было обнаружено, что сохранение подобной постоянной скорости перемещения не способно гарантировать эффективную работу соломотряса, особенно если происходят изменения продольного наклона уборочного комбайна. Это обусловлено тем, что при различных продольных наклонах уборочного комбайна изменяется средний угол, под которым растительный материал возбуждается элементами соломотряса, и таким образом, когда временной период, в течение которого растительный материал обрабатывается с помощью соломотряса, сохраняется постоянным, эффект возбуждения элементами соломотряса будет различным при изменении продольного наклона уборочного комбайна, все также приводя дальше к отклонению оптимального заданного значения системы управления.
Таким образом, все еще сохраняется необходимость в приводе соломотряса и связанной с ней системы управления для уборочного комбайна, который преодолевает упомянутые выше недостатки, способен установить повышение долговременной эффективности работы соломотряса посредством системы управления с повышенной точностью и увеличенной чувствительностью, имеет простую конструкцию, может легко модернизировать существующие конструкции уборочных комбайнов и не требует использования датчиков пропускной способности или датчиков скорости перемещения на высоте соломотряса.
Раскрытие изобретения
Согласно первому аспекту изобретения предложен уборочный комбайн, содержащий:
соломотряс;
систему привода соломотряса, соединенную с соломотрясом и выполненную с возможностью приведения в действие соломотряса с колебательным движением с регулируемой частотой; и
систему управления соломотрясом, соединенную с системой привода соломотряса и выполненную с возможностью управления регулируемой частотой колебательного движения,
характеризующийся тем, что
уборочный комбайн дополнительно содержит модуль наклона, соединенный с системой управления соломотрясом, при этом модуль наклона выполнен с возможностью предоставления информации о наклоне уборочного комбайна; и тем, что
система управления соломотрясом дополнительно содержит модуль конфигурации, содержащий заданную корреляцию между регулируемой частотой колебательного движения и информацией о наклоне уборочного комбайна, при этом система управления соломотрясом, кроме того, выполнена с возможностью управления регулируемой частотой колебательного движения в зависимости от информации о наклоне уборочного комбайна посредством заданной корреляции.
Таким образом, уборочный комбайн снабжен системой управления соломотрясом, которая способна реагировать быстрее, с большей точностью и с меньшим риском перегрузки в случае неожиданных изменений, так как система не должна ждать до тех пор, пока не начинают происходить изменения скорости перемещения или пропускной способности растительного материала на высоте соломотряса, но может немедленно начинать регулирование работы системы привода соломотряса, даже перед тем, как в функционировании самого соломотряса заметны какие-либо изменения. Надежность дополнительно улучшается, так как наклон уборочного комбайна в общем может быть измерен с более высокой точностью и меньшими помехами, а датчики могут быть расположены в менее неблагоприятных рабочих окружающих условиях, чем датчики пропускной способности или скорости перемещения,
Согласно предпочтительному варианту осуществления заданная корреляция содержит:
первое значение информации о наклоне,
второе значение информации о наклоне, которое относится к наклону, который выше чем наклон, связанный с первым значением; и тем, что
скорость изменения регулируемых частот, коррелирующих с первым значением, ниже чем скорость изменения регулируемой частоты, коррелирующей со вторым значением.
Было обнаружено, что посредством подобной специфической корреляции система управления приводом соломотряса способна оптимально уменьшать перегрузку в случае значительных краткосрочных изменений продольного наклона комбайна, которые происходят, например, на дне долины, когда комбайн переключается с работы под гору на работу в гору за относительно короткий временной период. Подобная специфическая корреляция также способна учитывать результат изменения угла бросания растительного материала относительно элементов соломотряса при его переработке соломотрясом при различных продольных наклонах комбайна. Как объяснялось выше, когда систему управления задействуют на протяжение достижения постоянной скорости перемещения растительного материала на соломотрясе, данный эффект возбуждения элементами соломотряса отличается, когда не принимают в расчет изменения продольного наклона уборочного комбайна.
Согласно еще одному дополнительному варианту осуществления модуль конфигурации содержит модуль сохранения конфигурации, содержащий множество сохраненных заданных корреляций для соответствующего множества типов сельскохозяйственных культур и/или условий уборки, и заданная корреляция выбирается из множества сохраненных заданных корреляций.
Согласно еще одному дополнительному варианту осуществления уборочный комбайн содержит жатку с модулем идентификации, который соединен с модулем конфигурации, при этом
модуль конфигурации выполнен с возможностью автоматического выбора заданной корреляции в зависимости от типа сельскохозяйственной культуры, коррелирующего с типом жатки, который определяется модулем идентификации.
Это предусматривает удобный для пользователя выбор и полуавтоматический выбор наиболее уместной корреляции для системы управления приводом соломотряса.
Согласно дополнительному варианту осуществления система управления соломотрясом дополнительно содержит модуль калибровки, соединенный с модулем корреляции, и по меньшей мере один датчик оценки, выполненный с возможностью оценки рабочего параметра соломотряса, при этом модуль калибровки выполнен с возможностью модификации заданной корреляции в зависимости от измерений по меньшей мере одного датчика оценки.
Необязательно во время процесса калибровки, модуль калибровки выполнен с возможностью:
приложения по меньшей мере одной заданной модификации по меньшей мере к одной заданной корреляции;
модификации по меньшей мере одной заданной корреляции, если одна из заданных модификаций ведет к заданному изменению в измерениях по меньшей мере одного датчика оценки.
Датчиком оценки является, например, датчик потери зерна.
Данные варианты осуществления модуля конфигурации и калибровки предусматривают автоматическую оптимизацию и тонкую настройку корреляции в зависимости от конкретных условий уборки по мере их прохождения, например, перед или в ходе уборочных работ.
Согласно дополнительному варианту осуществления модуль наклона содержит датчик наклона, выполненный с возможностью определения наклона уборочного комбайна.
Это допускает простой вариант осуществления, обеспечивающий использование сенсорной технологии, которая в общем доступна на существующих уборочных комбайнах.
Согласно дополнительному варианту осуществления система управления соломотрясом дополнительно соединена с модулем позиционирования, связанным с модулем наклона и выполненным с возможностью предоставления информации о положении и ориентации уборочного комбайна, и тем, что
модуль наклона содержит модуль наклона поля, содержащий информацию о наклоне поля, коррелирующую с конкретными положениями на поле, при этом модуль наклона поля выполнен с возможностью расчета наклона уборочного комбайна из положения и ориентации уборочного комбайна и информации о наклоне поля.
Это допускает также простой вариант осуществления, обеспечивающий использование сенсорной технологии, такой как, например, технология gps, которая в общем доступна на существующих уборочных комбайнах или которые могут быть легко модернизированы с ее помощью.
Согласно предпочтительному варианту осуществления система управления соломотрясом дополнительно содержит модуль планирования, соединенный с модулем позиционирования и модулем наклона, при этом модуль планирования выполнен с возможностью предоставления информации о планируемых будущих положениях и планируемых будущих ориентациях уборочного комбайна, и тем, что
модуль наклона поля дополнительно выполнен с возможностью расчета планируемого будущего наклона уборочного комбайна из информации о планируемом будущем наклоне поля, связанной с планируемым, будущим положением и планируемой будущей ориентацией уборочного комбайна.
Это позволяет упреждающее регулирование системы привода соломотряса, вместо регулирования только как реакция, которое позволяет принимать в расчет эффекты инерции системы привода соломотряса. Подобный модуль планирования доступен в существующих конструкциях комбайнов, как технология планирования точного земледелия, с помощью которой также легко могут быть модернизированы существующие уборочные комбайны.
Согласно еще одному предпочтительному варианту осуществления система управления соломотрясом дополнительно соединена с модулем полевой регистрации, соединенным с модулем наклона поля, при этом модуль полевой регистрации выполнен с возможностью регистрации информации о наклоне поля в текущем положении уборочного комбайна, и отличается тем, что модуль наклона поля дополнительно выполнен с возможностью расчета планируемой будущей информации о наклоне поля из регистрируемой информации о наклоне поля. Таким образом, система управления не требует обширных и полных предшествующих знаний характеристик поля для того, чтобы обеспечить возможность упреждающего регулирования системы привода соломотряса.
Согласно дополнительному варианту осуществления информация о наклоне уборочного комбайна содержит информацию о продольном наклоне уборочного комбайна.
Это предусматривает простую и эффективную установку системы управления приводом соломотряса, так как продольный наклон уборочного комбайна имеет наибольшее влияние на скорость перемещения и угол бросания растительного материала на соломотрясе.
Согласно варианту осуществления уборочный комбайн дополнительно содержит главную систему привода, обеспечивающую непрерывное вращательное движение с заданной частотой, и
при этом система привода соломотряса соединена с главной системой привода и содержит:
- по меньшей мере одну ременную вариаторную систему, соединенную с главной системой привода, соединенной с системой управления соломотрясом и выполненной с возможностью регулирования системой управления соломотрясом для преобразования непрерывного вращательного движения с заданной частотой главной системы привода в непрерывное вращательное движение с регулируемой частотой,
по меньшей мере один коленчатый вал, соединенный с ременной вариаторной системой и соломотрясом для преобразования непрерывного вращательного движения с регулируемой частотой в колебательное движение с регулируемой частотой.
Предпочтительно ременная вариаторная система содержит:
вращающийся вал;
первый диск вариатора и второй диск вариатора, расположенные на фиксированном расстоянии относительно друг друга на обоих осевых концах вращающегося вала;
центральный диск вариатора, расположенный между первым диском вариатора и вторым диском вариатора, при этом центральный диск вариатора или первый и второй диски вариатора являются подвижными вдоль осевого направления вращающегося вала для изменения первого и второго поперечных расстояний между центральным диском вариатора и первым и вторым дисками вариатора соответственно;
первый ремень вариатора, соединенный на одном конце с первым шкивом главной системы привода и расположенный на другом своем конце между первым диском вариатора и центральным диском вариатора;
второй ремень вариатора, на одном конце расположенный между вторым диском вариатора и центральным диском вариатора, а на другом своем конце соединенный со вторым шкивом коленчатого вала;
система позиционирования вариатора, соединенная с вращающимся валом и содержащая исполнительный механизм, выполненный с возможностью регулирования положения вращающегося вала относительно первого шкива и второго шкива, вызывая изменение первого и второго межцентровых расстояний между вращающимся валом и соответственно первым и вторым шкивами для того, чтобы преобразовывать непрерывное вращательное движение с заданной частотой в непрерывное вращательное движение с регулируемой частотой.
Данный вариант осуществления и расположение ременного вариатора обеспечивает простую и надежную конструкцию и обеспечивает легкую модернизацию существующей конструкции комбайна, так как она не требует какой-либо модификации шкивов коленчатого вала и главного привода. Дополнительно, данный вариант осуществления ременного вариатора позволяет использование единственного натяжного устройства 216 ремня для обеспечения достаточного натяжения обоих ремней вариатора. Предпочтительно, когда, например, при модифицировании существующей конструкции комбайна, правильное натяжение может обеспечиваться натяжным устройством 216 ремня, не требуя модификации существующей конструкции натяжного устройства ремня.
Согласно второму аспекту изобретения предложен способ работы уборочного комбайна согласно первому аспекту изобретения, отличающийся тем, что способ включает этапы:
получения системой управления соломотрясом входного сигнала, указывающего информацию о наклоне уборочного комбайна, предоставляемую модулем наклона;
расчет системой управления соломотрясом выходного сигнала посредством обработки входного сигнала посредством заданной корреляции между регулируемой частотой колебательного движения и информацией о наклоне уборочного комбайна; и
выдачи системой управления соломотрясом выходного сигнала для управления регулируемой частотой колебательного движения.
Согласно варианту осуществления данного способа входной сигнал является одним или более из следующего:
производной положения по высоте уборочного комбайна относительно времени или продольного положения уборочного комбайна;
соотношения разниц двух положений по высоте уборочного комбайна относительно соответствующих двух точек во времени или продольных положений уборочного комбайна; и
выходной сигнал является одним или более из следующего:
абсолютного значения для регулируемой частоты колебательного движения;
относительного значения относительно контрольного значения для регулируемой частоты колебательного движения.
Краткое описание чертежей
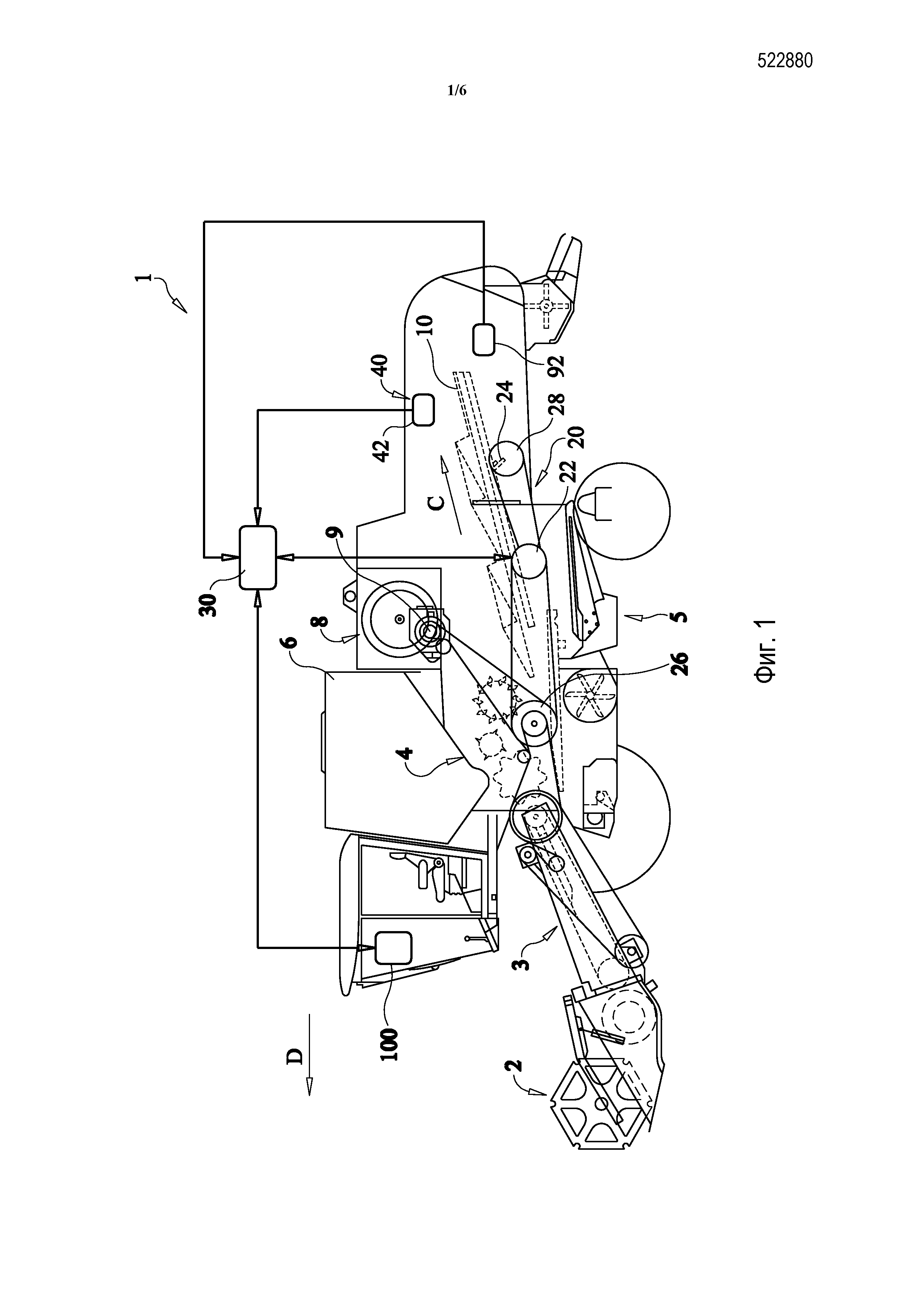
Фиг. 1 схематично иллюстрирует вариант осуществления уборочного комбайна согласно изобретению;
Фиг. 2 схематично иллюстрирует более подробно вариант осуществления системы привода соломотряса уборочного комбайна согласно изобретению;
Фиг. 3 схематично иллюстрирует предпочтительную корреляцию между регулируемой частотой и наклоном уборочного комбайна;
Фиг. 4 и 5 схематично показывают вариант осуществления системы привода соломотряса Фиг. 2 в различных рабочих режимах;
Фиг. 6 показывает ременной вариатор привода соломотряса фиг. 4 и 5 более подробно;
Фиг. 7 показывает разрез ременного вариатора Фиг. 6.
Подробное описание варианта осуществления (вариантов осуществления) изобретения
Фиг. 1 показывает вариант осуществления уборочного комбайна 1 согласно изобретению. Он относится к самоходному уборочному комбайну 1, который движется, в общем, вдоль продольного направления D движения в процессе уборочной работы, в которой сельскохозяйственную культуру убирают с поля посредством жатки 2, которая подает сельскохозяйственную культуру посредством подающего механизма 3 в блок 4 обмолота и разделения. Как показано на Фиг. 1, блок 4 обмолота и разделения содержит множество боковых молотильных и разделяющих барабанов, которые взаимодействуют с соответствующими подбарабаньями для высвобождения и отделения зерна от соломы сельскохозяйственной культуры. Сельскохозяйственная культура может включать, например, пшеницу, кукурузу, рис, сою, рис, злаковые травы, ячмень, овес и тому подобное. Зерно, которое было отделено от соломы, падает на механизм 5 очистки зерна, который содержит вентилятор и совершающие возвратно-поступательные движения сита для отделения от зерна мякины и других включений и необязательно собирает необмолоченный или частично обмолоченный материал, в общем называемый отходы на протяжение дополнительной обработки. Затем очищенное зерно поднимают в резервуар 6 для зерна, а отходы подают либо в отдельный второй молотильный аппарат, либо назад в блок 4 обмолота и разделения сельскохозяйственной культуры для нового процесса обмолота. Блок 4 обмолота и разделения подает оставшийся растительный материал, большей частью в виде соломы, в ряд соединенных соломотрясов 10, которые приводятся в действие с колебательным движением и транспортируют оставшийся растительный материал в общем вдоль направления C транспортировки сельскохозяйственной культуры в задний конец уборочного комбайна 1 для укладки на поле. Верхняя поверхность данных соломотрясов 10, как правило, перфорирована, чтобы обеспечить прохождение остаточных зерен на дно соломотряса, что направляет данные зерна вперед и вниз в механизм 5 очистки.
Обычно все основные агрегаты уборочного комбайна приводят в действие за счет энергии, получаемой из системы 8 главного привода, большей частью в виде двигателя внутреннего сгорания. Система 8 главного привода часто работает, по существу, с постоянной скоростью и изменяет свой выходной крутящий момент для удовлетворения требования множества ременных и/или цепных приводов, приводимых в действие от непосредственно приводимого в движение выходного шкива 9 двигателя, обеспечивая их таким образом непрерывным вращательным движением с заданной частотой. Как будет объяснено более подробно ниже, одним из агрегатов, приводимых таким образом в действие, является соломотряс 10. Соломотряс 10 соединен с системой 8 главного привода посредством системы 20 привода соломотряса. Система 20 привода соломотряса преобразует непрерывное вращательное движение с заданной частотой системы 8 главного привода в колебательное движение с регулируемой частотой для приведения в действие соломотряса 10. Для того, чтобы управлять данной регулируемой частотой колебательного движения системы 20 привода соломотряса, уборочный комбайн 1 содержит систему 30 управления соломотрясом. За счет увеличения данной регулируемой частоты, скорость перемещения сельскохозяйственной культуры на соломотрясе 10 может увеличиваться. За счет уменьшения данной регулируемой частоты, скорость перемещения сельскохозяйственной культуры на соломотрясе 10 может уменьшаться. Когда уборочный комбайн 1 движется вдоль своего направление движения D и испытывает положительный продольный наклон, вдоль данного направления движения D, что в общем означает, что он движется в гору, вследствие этого, скорость перемещения сельскохозяйственной культуры на соломотрясе будет увеличиваться, приводя к риску повышенной потери зерна, так как сокращается время, в течение которого растительный материал обрабатывается с помощью соломотряса 10. Когда уборочный комбайн 1 испытывает отрицательный продольный наклон, что в общем означает, что он движется под гору, скорость перемещения сельскохозяйственной культуры на соломотрясе будет понижаться, и будет повышенный риск уменьшения пропускной способности, а также риск образования пробок, так как затрачивается больше времени на прохождение растительного материала по соломотрясу 10. Также в данном случае существует риск повышенной потери зерна, так как слой растительного материала на соломотрясе будет становиться слишком толстым для оптимального отделения зерна.
Для того чтобы автоматически противодействовать колебаниям скорости перемещения на соломотрясе 10, вызванным колебаниями продольного наклона уборочного комбайна 1, он содержит модуль 40 наклона, который предоставляет системе 30 управления соломотрясом информацию о наклоне уборочного комбайна 1. Ясно, что в общем информация о наклоне уборочного комбайна 1, из которой может быть выведен продольный наклон уборочного комбайна 1, должна предоставляться модулем 40 наклона. Таким образом, отсутствует необходимость в том, чтобы модуль 40 наклона сам по себе предоставлял информацию о продольном наклоне уборочного комбайна 1. Таким образом, система 30 управления соломотрясом будет иметь возможность автоматического управления регулируемой частотой колебательного движения соломотряса 10 в зависимости от данной информации о продольном наклоне уборочного комбайна 1. Согласно наиболее простому варианту осуществления, который показан на Фиг. 1, модуль 40 наклона содержит датчик 42 наклона, который способен выявлять продольный наклон уборочного комбайна 1, это означает наклон в общем вдоль направления движения D. Данным датчиком 42 наклона может быть известный датчик, который подает сигнал в зависимости от продольного наклона уборочного комбайна 1. Согласно альтернативному варианту осуществления модуль наклона также может содержать модуль 44 наклона поля, который способен получать сигнал продольного наклона от модуля 50 позиционирования, такого как, например, модуль gps, который предоставляет последовательные измерения информации о местоположении уборочного комбайна 1. Из данных последовательных измерений информации о местоположении уборочного комбайна 1, может быть определено положение и ориентация уборочного комбайна во всех трех измерениях и равным образом любые изменения для них. В связи с этим, модуль 44 наклона поля также может определять продольный наклон из измерений модуля 50 позиционирования.
Согласно еще одному дополнительному варианту осуществления модуль 44 наклона поля содержит информацию о наклоне поля, коррелирующую с конкретными положениями на поле. Тогда модулю 44 наклона поля нужно только получать от модуля 50 позиционирования положение и ориентацию уборочного комбайна 1. На основании данной информации модуль 44 наклона поля может затем рассчитать продольный наклон уборочного комбайна 1, что означает объединение положения и ориентации уборочного комбайна 1, которые предоставляются модулем 50 позиционирования, и информации о наклоне поля, которая предоставляются модулем 44 наклона поля. Данная конфигурация предоставляет возможность использования информации о наклоне поля для будущих положений и будущих ориентаций уборочного комбайна 1 и/или использования систем географической информации, которые способны предоставлять информацию о наклоне поля с повышенной точностью, чем например доступна от модуля 50 позиционирования. Модуль 44 наклона поля может, например, содержать цифровые карты местности высокой точности для поля, на котором работает уборочный комбайн 1, или карты местности, созданные во время предыдущего прохода сельскохозяйственного транспортного средства с системой gps высокой точности.
Для того чтобы получить полное преимущество информации о наклоне поля, которая предоставляется модулем 44 наклона поля, уборочный комбайн согласно альтернативному варианту осуществления, показанному на Фиг. 2, дополнительно содержит модуль 60 планирования. Подобный модуль 60 планирования может, например, быть частью навигационного блока системы точного земледелия, который обеспечивает наведение или автоматически управляет уборочным комбайном 1 вдоль заданного пути по полю в процессе работы. За счет этого подобный модуль 60 планирования таким образом может предоставлять информацию о планируемых будущих положениях и планируемых будущих ориентациях уборочного комбайна 1 модулю 40 наклона. На основании данной информации модуль 44 наклона поля тогда будет способен рассчитать планируемую будущую информацию о наклоне поля, относящуюся к планируемым будущим продольным наклонам уборочного комбайна 1, позволяя системе 30 управления соломотрясом предвидеть любые планируемые изменения вместо просто реакции на данные изменения, когда они происходят. Это также позволяет системе 30 управления соломотрясом дополнительно компенсировать инерцию системы 20 привода соломотряса. Это особенно полезно при пересечении нижней части долины, верхней части холма или во время поворотов на незапаханных концах поля, во время которых могут происходить резкие изменения продольного наклона уборочного комбайна 1. Когда, например, уборочный комбайн 1 обрабатывает направленный в гору проход поля при приближении к незапаханному концу поля, он будет часто выполнять разворот на 180 градусов, а впоследствии будет следовать назад под гору, обрабатывая соседний проход. Подобное краткосрочное переключение с работы в гору на работу под гору требует от системы 30 управления соломотрясом соответствующего краткосрочного изменения. Модуль 60 планирования обеспечивает информирование системы 30 управления соломотрясом о подобном планируемом будущем краткосрочном изменении перед тем, как оно фактически происходит, так что она может своевременно выполнять необходимые изменения в работе системы 20 привода соломотряса.
Согласно отдельному варианту осуществления, показанному на Фиг. 2, система 30 управления соломотрясом также содержит модуль 70 полевой регистрации. Модуль 70 регистрации регистрирует текущее положение уборочного комбайна 1 по мере того, как он проходит по полю и подает данную информацию в модуль 44 наклона поля. Таким образом, модуль 44 наклона поля способен накапливать информацию о наклоне поля, которая будет, например, предоставлять возможность использования данной информации во время будущих работ на поле. Дополнительно, зарегистрированная информация о наклоне будет позволять модулю 44 наклона поля рассчитывать информацию о наклоне поля, коррелирующую с планируемыми будущими положениями и планируемыми будущими ориентациями уборочного комбайна 1. Это может быть осуществлено, например, с использованием такого способа, который описан, например, в WO2012/007549 для получения предполагаемой полевой характеристики для конкретного местоположения в поле на основании известных полевых характеристик из соседних местоположений и допущений о варьировании данных полевых характеристик. Например, будет допущено, что будущий проход поля будет иметь приблизительно такой же уклон, как соседний предшествующий проход поля. Таким образом, даже без наличия доступной информации о наклоне поля для всего поля, подлежащего обработке уборочным комбайном, модуль 44 наклона поля будет все-таки способен рассчитывать планируемую,будущую информацию о наклоне поля, коррелирующую с планируемыми будущими положениями и планируемыми будущими ориентациями уборочного комбайна из зарегистрированной информации о наклоне поля, предоставляемой модулем 70 полевой регистрации.
В варианте осуществления по Фиг. 2, система 30 управления соломотрясом также содержит модуль 80 конфигурации. Подобный модуль 80 конфигурации содержит заданную корреляцию между регулируемой частотой колебательного движения соломотряса 10 и информацией о продольном наклоне уборочного комбайна 1. Две подобные корреляции схематично показаны на Фиг. 3. Она показывает корреляцию между продольным наклоном, который отложен в масштабе на горизонтальной оси в градусах относительно горизонтального положения уборочного комбайна 1 и регулируемой частотой соломотряса 10, которая отложена в масштабе на вертикальной оси в оборотах в минуту (об/мин). Одна из данных корреляций показана непрерывной линией. Она показывает, что при положительном продольном наклоне, составляющем 10°, или приблизительно 20% в гору, регулируемая частота составляет приблизительно 170 об/мин; при продольном наклоне, составляющем 0°, или на уровне земли, регулируемая частота составляет приблизительно 210 об/мин; при отрицательном продольном наклоне, составляющем -10°, или приблизительно 20% под гору, регулируемая частота составляет приблизительно 240 об/мин. Еще одна подобная корреляция показана пунктирными линиями, которая показывает меньшее колебание регулируемой частоты для такого же диапазона колебаний продольного наклона. Модуль 80 конфигурации согласно варианту осуществления дополнительно содержит модуль 82 сохранения конфигурации, содержащий множество сохраненных заданных корреляций. Тогда модуль 80 конфигурации, например, способен выбрать одну их данных сохраненных корреляций на основании типа сельскохозяйственной культуры или условий уборки. Непрерывной линией может быть, например, сохраненная корреляция для уборки пшеницы в то время, как пунктирной линией может быть, например, сохраненная корреляция для уборки кукурузы. Согласно альтернативному варианту осуществления непрерывной линией может быть, например, сохраненная корреляция для уборки сельскохозяйственной культуры с высоким содержанием влаги, в то время, как пунктирной линией является сохраненная корреляция для уборки такой же сельскохозяйственной культуры, но с низким содержанием влаги. Ясно, что множество других сохраненных корреляций могут быть получены из модуля 82 сохранения конфигурации в модуль 80 конфигурации для конкретных типов сельскохозяйственных культур и/или условий уборки. Тип сельскохозяйственной культуры и/или условия уборки могут, например, вводиться оператором на подходящем операторском интерфейсе 100, который обеспечивает взаимодействие оператора уборочного комбайна 1 с системой 30 управления соломотрясом. Однако тип сельскохозяйственной культуры также может определяться автоматически, когда уборочный комбайн 1 содержит жатку 2 с модулем идентификации. Подобный модуль идентификации предоставляет информацию о типе жатки, которая соединена с уборочным комбайном 1 и таким образом позволяет установить, подходит ли жатка для уборки, например, пшеницы или кукурузы. Когда данная информация предоставляется в модуль 80 конфигурации, она будет позволять ему автоматически выбирать наиболее подходящую сохраненную функцию корреляции. В качестве альтернативы, условия уборки, такие как, например, содержание влаги растительного материала или температура, равным образом могут определяться автоматически посредством подходящих датчиков.
Из варианта осуществления, показанного на Фиг. 3, также понятно, что скорость изменения регулируемых частот, коррелирующих с первым диапазоном R1 отрицательных продольных наклонов, ниже чем скорость изменения регулируемой частоты, коррелирующей со вторым диапазоном R2 положительного продольного наклона. Это предпочтительно потому, что при движении в гору может быть обеспечена возможность более быстрого падения регулируемой частоты для предотвращения увеличения потери зерна за счет сохранения скорости перемещения растительного материала на соломотрясе 10 достаточно низкой. Небольшое превышение оптимальной скорости перемещения на нижнем конце учитывает изменение угла бросания элементами соломотряса, а также является безопасным, так как это не будет оказывать немедленный отрицательный эффект на потерю зерна. Однако, это также справедливо во время работы под гору и для того, чтобы принимать в расчет изменение угла бросания элементами соломотряса и оставаться в безопасной зоне в отношении потери зерна, целесообразно задействовать регулируемую частоту с более низкой скоростью изменения, чем регулируемую частоту для работы в гору. Таким образом скорость перемещения будет достаточно высокой, чтобы избежать блокировок или других негативных эффектов для рабочей эффективности уборочного комбайна, избегая в то же время также всяких возможных отрицательных эффектов относительно потери зерна. Ясно, что могут быть определены другие подходящие диапазоны R1 и R2, чем те, что показаны на Фиг. 3, при условии, что второй диапазон R2 относится к продольным наклонам, более высоким, чем продольные наклоны первого диапазона R1. Кроме того, ясно, что согласно альтернативным вариантам осуществления, использование диапазонов для информации о наклоне уборочного комбайна 1 не требуется при условии, что для одного или более низких значений информации о наклоне существует коррелирующая более низкая скорость изменения регулируемой частоты по сравнению с одним или более высокими значениями информации о наклоне.
Система 30 управления соломотрясом варианта осуществления Фиг. 2 также содержит модуль 90 калибровки, соединенный с модулем 80 корреляции. Данный модуль 90 калибровки предусматривает дополнительную оптимизацию корреляции модуля 80 конфигурации. Для того, чтобы обеспечить это, модуль 90 калибровки соединен по меньшей мере с одним датчиком 92 оценки, таким как, например, датчики потери зерна, расположенные на конце на выходе соломотряса 10. Вместо необходимости введения оператором, например, условий уборки, таких как, например содержание влаги сельскохозяйственной культуры, модуль 90 калибровки может автоматически пробовать множество изменений заданной корреляции, проверяя в то же время результат по измерениям датчика 92 оценки и впоследствии модифицируя заданную корреляцию с помощью одного из применяемых изменений, которые приводят к желательному изменению измерений датчика 92 оценки. Согласно особому эффективному способу работы, модуль 90 калибровки может задействовать уборочный комбайн 1 во время процесса калибровки, который продолжается три прохода поля с тремя различными корреляциями, которые связаны с тремя различными уровнями влажности, по одной для каждого прохода поля. На основании результатов датчика 92 потери зерна во время каждого из данных проходов затем могла бы быть выбрана конкретная корреляция, которая приводила бы к наиболее оптимальной ситуации в отношении потери зерна. Ясно, что могут быть выбраны другие датчики 92 оценки, которые отслеживают подходящий параметр или комбинацию параметров, которые связаны с желательной работой уборочного комбайна 1, таких как, например, пропускная способность растительного материала, расход топлива и т.д.
Как показано на Фиг. 1 и 2, уборочный комбайн 1 содержит систему 8 главного привода, обеспечивающую непрерывное вращательное движение с заданной частотой. Данное вращательное движение передается посредством ремня от шкива 9 главного привода на первый шкив 26 и впоследствии в систему 20 привода соломотряса. Данная система 20 привода соломотряса соединена с системой 8 главного привода и содержит по меньшей мере одну ременную вариаторную систему 22 для преобразования непрерывного вращательного движения с заданной частотой в непрерывное вращательное движение с регулируемой частотой, как будет объяснено более подробно ниже. Впоследствии ременная вариаторная система 22 соединяется с коленчатым валом 24 для преобразования непрерывного вращательного движения с данной регулируемой частотой в колебательное движение с данной регулируемой частотой для соломотряса 10. Подобный ременной вариатор может быть подходящим вариантом осуществления ременного вариатора, известного специалистам в данной области техники, например, такого, как схематично показан на Фиг. 1. В большинстве подобных систем исполнительный механизм смещает диск вариатора с наклонной контактной поверхностью для ремня для того, чтобы изменить расстояние между осью вращения ременного вариатора и ремнем в процессе работы и в связи с этим изменить регулируемую частоту. Как показано на Фиг. 1 и 2, система 30 управления соломотрясом управляет регулируемой частотой за счет измерения скорости вращения коленчатого вала 24 посредством подходящего датчика 32, такого как, например, кодировщик вращательного движения и регулирования исполнительного механизма ременного вариатора 22, чтобы установить его таким образом, чтобы достигалась желательная скорость вращения коленчатого вала.
Хотя известно несколько возможных конструкций для ременной вариаторной системы 22, вариант осуществления, показанный на Фиг. 2 и более подробно на Фиг. 4-7, является особенно предпочтительным, так как он позволяет модифицировать существующий уборочный комбайн до уборочного комбайна согласно изобретению, не требуя обширной модификации. Как схематично показано на Фиг. 2, альтернативный вариант осуществления ременной вариаторной системы 22, показанной более подробно на Фиг. 7, содержит вращающийся вал 202, на котором первый диск 204 вариатора и второй диск 206 вариатора расположены на фиксированном расстоянии относительно друг друга на обоих осевых концах вращающегося вала 202. Между этими первым диском 204 вариатора и вторым диском 206 вариатора расположен центральный диск 208 вариатора. Согласно варианту осуществления данные первый и второй диски 204, 206 вариатора могут двигаться вместе вдоль осевого направления вращающегося вала 202. Подобное осевое движение узла, содержащего первый и второй диски вариатора, вызывает изменение первого и второго поперечных расстояний T1, T2 между центральным диском 208 вариатора и соответственно первым и вторым дисками 204, 206 вариатора. Система 210 позиционирования вариатора содержит исполнительный механизм 212, который управляет положением данного вращающегося вала 202 относительно первого шкива 26, который приводится в действие от системы 8 главного привода, которое показано в виде межцентрового расстояния D1 на Фиг. 2. Система 210 позиционирования вариатора соответственно также управляет положением относительно второго шкива 28, который соединен с коленчатым валом 24, которое показано в виде межцентрового расстояния D2 на Фиг. 2. Когда исполнительный механизм 212 изменяет данные расстояния D1 и D2, положение вдоль осевого направления вращающегося вала 202 узла, содержащего первый и второй диски 204, 206 вариатора, изменится относительно центрального диска 208 вариатора, как диктуется длиной первого ремня 214 вариатора и второго ремня 218 вариатора. Это означает, что поперечные расстояния T1 и T2 изменятся в то время, как сумма T1 и T2 останется постоянной. Так как, например D1, увеличивается посредством исполнительного механизма 212 и вследствие того, что первый ремень 214 вариатора имеет постоянную длину, первый ремень 214 вариатора будет передвигаться ближе к вращающемуся валу 202, что, в свою очередь, вызовет передвижение первого диска 204 вариатора от центрального диска 208 вариатора вдоль осевого направления вращающегося вала 202, увеличивая таким образом первое поперечное расстояние T1. Увеличение поперечного расстояния T1 вызовет соответствующее уменьшение поперечного расстояния T2, что необходимо для дополнительного передвижения второго ремня вариатора от вращающегося вала 202, что уравновешивает уменьшение межцентрового расстояния D2 в комбинации с постоянной длиной второго ремня 218 вариатора. Ясно, что для функционирования ременного вариатора таким образом, как в общем известно специалистам в данной области техники и ясно показано на Фиг. 7, контактная поверхность ремня вариатора и соответствующая контактная поверхность дисков вариатора соответствующим образом наклонены относительно направления, перпендикулярного осевому направлению вращающегося вала 202. Первый ремень 214 вариатора соединен на одном конце со шкивом 26 системы 8 главного привода, а на другом своем конце расположен между первым диском 204 вариатора и центральным диском 208 вариатора. Второй ремень 218 вариатора соединен на одном конце со шкивом 28 коленчатого вала 24, а на другом своем конце расположен между вторым диском 206 вариатора и центральным диском 208 вариатора. Таким образом, система 210 позиционирования вариатора способна трансформировать непрерывное вращательное движение с заданной частотой в непрерывное вращательное движение с регулируемой частотой посредством изменения положения вращающегося вала 202 ременной вариаторной системы 22. Кроме того, данная форма ременной вариаторной системы 22 может быть помещена в существующий уборочный комбайн 1, не требуя какой-либо модификации шкивов главной системы привода, а также шкивов системы привода соломотряса. Согласно альтернативному варианту осуществления ременного вариатора 22, центральный диск 208 вариатора выполнен с возможностью перемещения вдоль осевого направления центрального вала относительно первого и второго дисков 204, 206 вариатора, которые затем располагаются в фиксированном осевом положении. Как можно видеть на Фиг. 4 и 5, ясно, что данный вариант осуществления ременного вариатора 22 допускает использование единственного натяжного устройства 216 ремня для обеспечения достаточного натяжения обоих ремней 214, 218 вариатора. Это позволяет модифицировать существующую систему привода соломотряса без подобного ременного вариатора, не требуя каких-либо дополнительных изменений кроме добавления ременного вариатора и обоих ремней вариатора.
Вариант осуществления ременной вариаторной системы 22, в которой система 210 позиционирования дополнительно содержит поворотный рычаг 220, который поворачивается вокруг оси 222 поворота для соединения вращающегося вала 202 с исполнительным механизмом 212, показан на Фиг. 4-7. Фиг. 4 показывает ситуацию, в которой D1 является минимальным, потому что исполнительный механизм 212, которым является, например, гидравлический или электрический исполнительный механизм, находится в своем наиболее втянутом состоянии. Фиг. 5 показывает ситуацию, в которой D1 является максимальным, потому что исполнительный механизм 212 находится в своем наиболее выдвинутом состоянии. Как дополнительно более подробно показано на Фиг. 6, могут быть предусмотрены подходящие стопоры 226 для ограничения диапазона движения системы 210 позиционирования вариатора. В данном варианте осуществления стопоры 226 выполнены в виде скобы, ограничивающей диапазон движения поворотного рычага 220. В итоге Фиг. 7 обеспечивает еще одно дополнительное подробное изображение системы 22 вариатора за счет предоставления его изображения в разрезе в положении, соответствующем положению Фиг. 5, в котором D2 является минимальным, что означает, что второй ремень 218 вариатора будет двигаться наружу, а первый ремень 214 вариатора будет двигаться внутрь относительно вращающегося вала 202, заставляя подвижный центральный диск 208 вариатора двигаться вправо, как видно на Фиг. 7.
Как ясно из описания вариантов осуществления выше, способ работы подобного уборочного комбайна 1 обычно запускается при получении системой 30 управления соломотрясом входного сигнала, указывающего информацию о наклоне уборочного комбайна 1. Данный входной сигнал предоставляется модулем 40 наклона на основании, например, измерений датчиком 42 наклона или модулем 50 позиционирования. Впоследствии, система 30 управления соломотрясом рассчитывает выходной сигнал посредством обработки входного сигнала посредством заданной корреляции между регулируемой частотой колебательного движения и информацией о наклоне уборочного комбайна, такой как, например, показано на Фиг. 3. Затем система 30 управления соломотрясом предоставляет данный выходной сигнал для управления регулируемой частотой колебательного движения, например, в систему 210 позиционирования вариатора.
Согласно наиболее простому варианту осуществления, где например модуль 50 позиционирования предоставляет положение по высоте комбайна, входной сигнал может отражать производное положения по высоте уборочного комбайна 1 относительно времени. Данное изменение положения по высоте в зависимости от времени является характерным для уклона вдоль направления движения уборочного комбайна. В качестве альтернативы вместо производного относительно времени может быть взято производное относительно продольного положения уборочного комбайна 1. Также в данном случае изменение положения по высоте комбайна в зависимости от смещения уборочного комбайна вдоль его направления движения пропорционально его продольному наклону. Согласно еще одной дополнительной альтернативе, вместо расчета производного также может использоваться соотношение различий двух положений по высоте уборочного комбайна 1 относительно соответствующих двух точек во времени или продольных положений уборочного комбайна 1. Выходной сигнал может быть отражением абсолютного значения для регулируемой частоты колебательного движения, однако возможны подходящие альтернативы, такие как, например, относительное значение относительно контрольного значения для регулируемой частоты колебательного движения.
Хотя представленное изобретение было проиллюстрировано посредством ссылки на конкретные варианты осуществления, специалистам в данной области техники следует понимать, что изобретение не ограничено деталями вышеизложенных иллюстративных вариантов осуществления и что представленное изобретение может быть реализовано с различными изменениями и модификациями, не выходя за рамки его объема. Вследствие этого, представленные варианты осуществления во всех отношениях следует рассматривать как иллюстративные, а не ограничительные, при этом объем изобретения отражается приложенной формулой изобретения, а не вышеизложенным описанием, и вследствие этого предполагается, что формула изобретения охватывает все изменения, которые попадают в пределы значения и диапазона ее эквивалентности. Другими словами, предусматривается охват любых и всех модификаций, вариантов или эквивалентов, которые попадают в рамки объема базовых основополагающих принципов и существенные признаки которых изложены здесь. Кроме того, следует понимать, что слова «содержащий» или «содержат» не исключают другие элементы или этапы, единственное число не исключает множественное число, и что единственный элемент, такой как компьютерная система, процессор или другой интегрированный блок может выполнять функции нескольких средств, перечисленных в формуле изобретения. Любые ссылочные позиции в формуле изобретения не должны трактоваться как ограничение соответствующего пункта формулы изобретения. Термины «первый», «второй», «третий», «a», «b», «c» и тому подобное при использовании в описании или в формуле изобретения вводятся для проведения различия между аналогичными элементами или этапами и не обязательно описывают последовательный или хронологический порядок. Аналогичным образом, термины «верх», «низ», «над», «под» и тому подобное введены для описательных целей и не обязательно для обозначения относительных положений. Следует понимать, что термины, используемые таким образом, являются взаимозаменяемыми в подходящих обстоятельствах и варианты осуществления изобретения способны работать согласно представленному изобретению в других последовательностях или в ориентациях, отличающихся от последовательности (последовательностей), описанной(ых) или проиллюстрированной(ых) выше.
Реферат
Группа изобретений относится к сельскохозяйственному машиностроению. Зерноуборочный комбайн содержит соломотряс с системой его привода, систему управления соломотрясом и модуль наклона. Система привода соломотряса выполнена с возможностью приведения в действие соломотряса с колебательным движением с регулируемой частотой. Модуль наклона соединен с системой управления соломотрясом и выполнен с возможностью предоставления информации о наклоне комбайна. Система управления соломотрясом соединена с системой его привода и выполнена с возможностью управления регулируемой частотой колебательного движения в зависимости от информации о наклоне зерноуборочного комбайна. Использование группы изобретений повышает эффективность работы соломотряса. 2 н. и 12 з.п. ф-лы, 7 ил.
Формула
соломотряс (10);
систему (20) привода соломотряса, соединенную с соломотрясом (10) и выполненную с возможностью приведения в действие соломотряса (10) с колебательным движением с регулируемой частотой, и
систему (30) управления соломотрясом, соединенную с системой (20) привода соломотряса и выполненную с возможностью управления регулируемой частотой колебательного движения,
модуль (40) наклона, соединенный с системой (30) управления соломотрясом и выполненный с возможностью предоставления информации о наклоне уборочного комбайна (1),
при этом система (30) управления соломотрясом дополнительно содержит модуль (80) конфигурации, содержащий заданную корреляцию между регулируемой частотой колебательного движения и информацией о наклоне уборочного комбайна (1), причем система (30) управления соломотрясом дополнительно выполнена с возможностью управления регулируемой частотой колебательного движения в зависимости от информации о наклоне уборочного комбайна (1) посредством заданной корреляции, при этом
заданная корреляция содержит:
первое значение информации о наклоне и
второе значение информации о наклоне, которое относится к наклону, более высокому, чем наклон, связанный с первым значением,
при этом скорость изменения регулируемых частот, коррелирующих с первым значением, ниже, чем скорость изменения регулируемой частоты, коррелирующей со вторым значением.
тем, что модуль (80) конфигурации выполнен с возможностью автоматического выбора заданной корреляции из множества сохраненных заданных корреляций в зависимости от типа сельскохозяйственной культуры, коррелирующего с типом жатки, который определяется модулем идентификации.
применения по меньшей мере одной заданной модификации к заданной корреляции;
модификации заданной корреляции, если одна из заданных модификаций ведет к заданному изменению в измерениях по меньшей мере одного датчика (92) оценки.
модуль (40) наклона содержит модуль (44) наклона поля, содержащий информацию о наклоне поля, коррелирующую с конкретными положениями на поле, при этом модуль (44) наклона поля выполнен с возможностью расчета наклона уборочного комбайна (1) из положения и ориентации уборочного комбайна (1), и информации о наклоне поля.
тем, что модуль (44) наклона поля дополнительно выполнен с возможностью расчета планируемого будущего наклона уборочного комбайна (1) из информации о планируемом будущем наклоне поля, связанной с планируемым, будущим положением и планируемой будущей ориентацией уборочного комбайна (1).
тем, что модуль (44) наклона поля дополнительно выполнен с возможностью расчета информации о планируемом будущем наклоне поля из зарегистрированной информации о наклоне поля.
по меньшей мере одну ременную вариаторную систему (22), соединенную с системой (8) главного привода, соединенную с системой (30) управления соломотрясом, и выполненную с возможностью регулирования системой (30) управления соломотрясом для преобразования непрерывного вращательного движения с заданной частотой системы (8) главного привода в непрерывное вращательное движение с регулируемой частотой,
по меньшей мере один коленчатый вал (24), соединенный с ременной вариаторной системой (22) и соломотрясом (10) для преобразования непрерывного вращательного движения с регулируемой частотой в колебательное движение с регулируемой частотой.
вращающийся вал (202);
первый диск (204) вариатора и второй диск (206) вариатора, расположенные на фиксированном расстоянии относительно друг друга на обоих осевых концах вращающегося вала (202);
центральный диск (208) вариатора, расположенный между первым диском (204) вариатора и вторым диском (206) вариатора, при этом центральный диск (208) вариатора или первый и второй диски (204, 206) вариатора выполнены с возможностью перемещения вдоль осевого направления вращающегося вала (202) с изменением первого и второго поперечных расстояний между центральным диском (208) вариатора и первым и вторым дисками (204, 206) вариатора соответственно;
первый ремень (214) вариатора, соединенный на одном конце с первым шкивом (26) системы (8) главного привода и расположенный на другом своем конце между первым диском (204) вариатора и центральным диском (208) вариатора;
второй ремень (218) вариатора, расположенный на одном конце между вторым диском (206) вариатора и центральным диском (208) вариатора, а на другом своем конце соединенный со вторым шкивом (28) коленчатого вала (24);
систему (210) позиционирования вариатора, соединенную с вращающимся валом (202) и содержащую исполнительный механизм (212), выполненный с возможностью регулирования положения вращающегося вала (202) относительно первого шкива (26) и второго шкива (28), вызывая изменение первого и второго межцентровых расстояний между вращающимся валом (202) и соответственно первым и вторым шкивами (26, 28) для того, чтобы преобразовывать непрерывное вращательное движение с заданной частотой в непрерывное вращательное движение с регулируемой частотой.
получения системой (30) управления соломотрясом входного сигнала, указывающего информацию о наклоне уборочного комбайна (1), предоставляемую модулем (40) наклона;
расчета системой (30) управления соломотрясом выходного сигнала посредством обработки входного сигнала посредством заданной корреляции между регулируемой частотой колебательного движения и информацией о наклоне уборочного комбайна; при этом заданная корреляция содержит первое значение информации о наклоне и второе значение информации о наклоне, которое относится к наклону, более высокому, чем наклон, связанный с первым значением, причем скорость изменения регулируемых частот, коррелирующая с первым значением, ниже, чем скорость изменения регулируемой частоты, коррелирующей со вторым значением; и
выдачи системой (30) управления соломотрясом выходного сигнала для управления регулируемой частотой колебательного движения.
производной положения по высоте уборочного комбайна (1) относительно времени или продольного положения уборочного комбайна (1);
соотношения различий двух положений по высоте уборочного комбайна (1) относительно соответствующих двух точек во времени или продольных положений уборочного комбайна (1), и
тем, что выходной сигнал является одним или более из следующего:
абсолютного значения для регулируемой частоты колебательного движения;
относительного значения относительно контрольного значения для регулируемой частоты колебательного движения.
Документы, цитированные в отчёте о поиске
Способ и конструкция привода устройства транспортирования убранной массы
Комментарии