Устройство для контроля процесса взбивания настольного миксера - RU2744185C2
Код документа: RU2744185C2
Чертежи




Описание
Область техники
Изобретение относится к настольным миксерам, более конкретно к настольному миксеру, обладающему способностью контролировать ход процесса.
Уровень техники
В настольном миксере используется снабженная приводом головка для приведения в движение традиционного или планетарного вспомогательного приспособления. Вспомогательное приспособление воздействует на пищевые продукты, содержащиеся в смесительной чаше, расположенной под головкой.
Недостатком известных настольных миксеров является то, что их работа требует непрерывного контроля состояния ингредиентов в чаше миксера, чтобы определить, когда процесс перемешивания требуется изменить и/или завершить.
Задача изобретения
Задача настоящего изобретения заключается в преодолении или по существу устранении вышеуказанного недостатка.
Сущность изобретения
В настоящем документе раскрыто обрабатывающее устройство для обработки субстанции, расположенной в контейнере, имеющем внутреннее пространство, при этом обрабатывающее устройство включает в себя:
устройство, вызывающее движение, располагаемое во внутреннем пространстве контейнера, так что относительное движение между контейнером и устройством приводит к обработке субстанции;
электрический двигатель, выполненный с возможностью функциональной связи с контейнером и устройством, чтобы вызывать упомянутое относительное движение;
датчик для создания сенсорного луча, направляемого во внутреннее пространство для образования отражения от субстанции во внутреннем пространстве и выработки сигнала, характеризующего отражение; а также
контроллер, функционально связанный с датчиком и двигателем для приема сигнала от датчика, с тем чтобы распознавать изменение сигнала, а значит, изменение состояния субстанции в чаше, и изменять работу двигателя, когда контроллер распознал заданное изменение сигнала.
Предпочтительно датчик представляет собой инфракрасный датчик, создающий сенсорный луч, при этом сенсорный луч является инфракрасным лучом.
Предпочтительно отражение обладает интенсивностью, при этом контроллер выполнен с возможностью изменения работы двигателя в зависимости от интенсивности отражения.
Предпочтительно контроллер выполнен с возможностью регистрации базового показания в отношении интенсивности отражения до управления обрабатывающим устройством, при этом датчик и контроллер также выполнены с возможностью определения скользящего среднего значения расстояния между датчиком и верхней поверхностью субстанции в контейнере, от которой луч отражается.
Предпочтительно контроллер выполнен с возможностью изменения работы двигателя в зависимости от расстояния между датчиком и верхней поверхностью.
Предпочтительно контейнер представляет собой чашу, при этом обрабатывающее устройство включает в себя корпус, содержащий двигатель и поддерживающий устройство так, что оно проходит вниз от корпуса во внутреннее пространство, при этом датчик направляет упомянутый луч вниз в сторону внутреннего пространства.
Предпочтительно датчик и контроллер выполнены с возможностью управления двигателем в зависимости от расстояния между датчиком и верхней поверхностью субстанции.
Предпочтительно зависимость включает в себя скользящее среднее значение упомянутого расстояния.
Предпочтительно обрабатывающее устройство представляет собой кухонный комбайн.
В настоящем описании дополнительно раскрыты вышеописанное обрабатывающее устройство и упомянутый контейнер в сочетании между собой.
Краткое описание чертежей
Чтобы изобретение можно было лучше понять, приводятся ссылки на следующие чертежи, где:
фиг. 1 – вид в разрезе миксера, имеющего инфракрасный датчик;
фиг. 2 – вид в разрезе миксера, имеющего инфракрасный датчик, когда миксер создает комок теста;
на фиг. 3 показано использование технологии для приготовления смеси масла и сахара;
фиг. 4 – блок-схема алгоритма, иллюстрирующая использование данных инфракрасного датчика в процессе перемешивания;
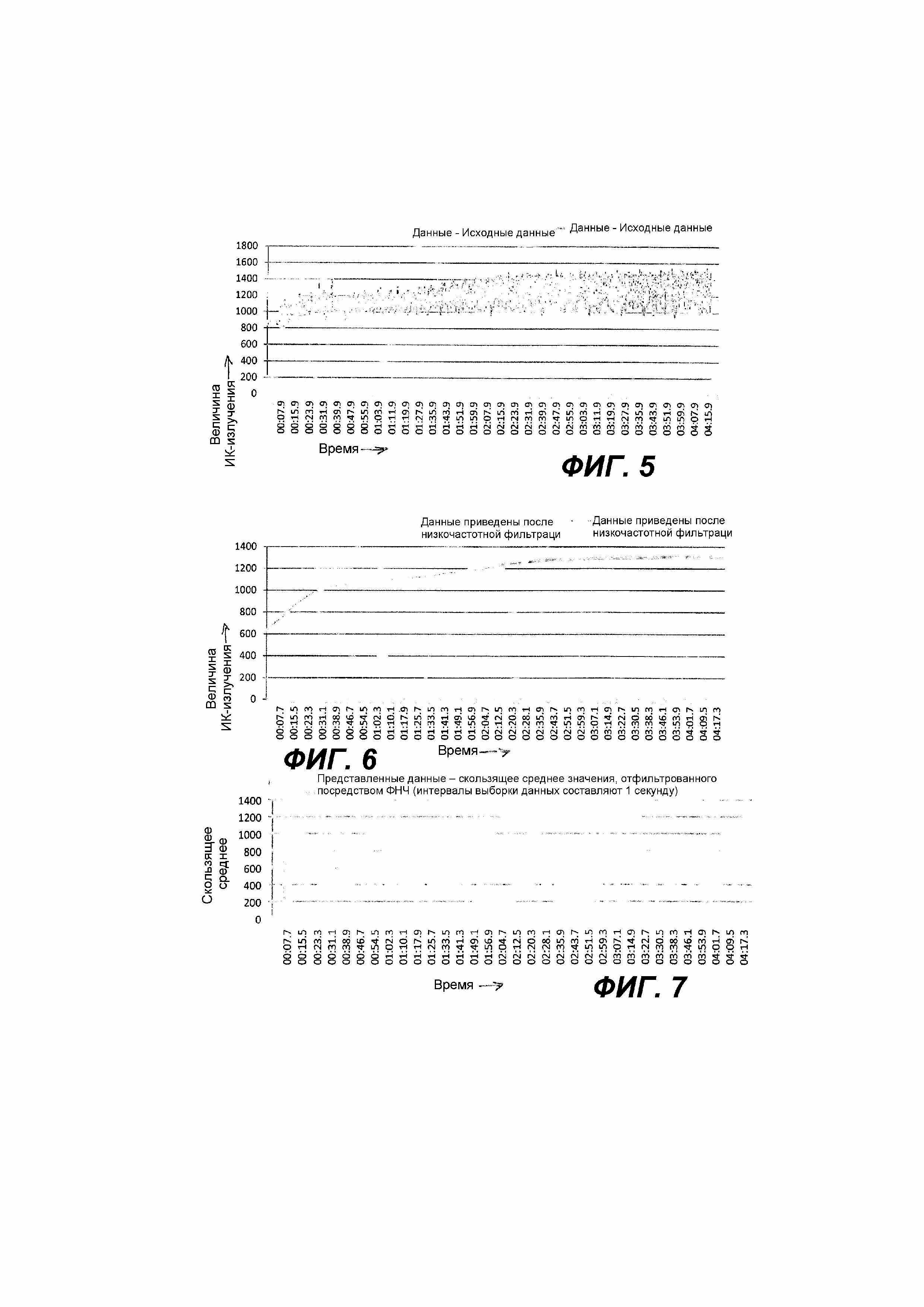
фиг. 5 – диаграмма, иллюстрирующая произвольные значения напряжения во времени, являющиеся выходными данными инфракрасного датчика, установленного на миксере;
на фиг. 6 показан результат низкочастотной фильтрации данных, изображенных на фиг. 5;
на фиг. 7 показан результат расчета и отображения скользящего среднего данных низкочастотной фильтрации, изображенных на фиг. 6.
Лучший вариант и другие варианты осуществления технологии
На фиг. 1 показан настольный или стационарный миксер 100. Миксер 100 имеет вращающуюся головку 101, в которой может располагаться электрический двигатель 102. Двигатель 102 приводит в движение одно или несколько вспомогательных приспособлений 103. Головка 101 может включать в себя традиционную или планетарную зубчатую передачу 104. В конечном счете, двигатель 102 приводит в движение вспомогательное приспособление 103 в смесительной чаше 105. Двигатель 102 располагается над чашей 105. Вспомогательное приспособление 103 представляет собой устройство, предназначенное для приведения в движение ингредиентов 106. Головка 101 является частью корпуса 120 миксера 100. Корпус 120 включает в себя основание 121, имеющее платформу 122, на которую опирается чаша 105. Головка 101 шарнирно соединена с основанием 121 для углового перемещения вокруг в целом горизонтальной оси, создаваемой шарниром 123. Вспомогательное приспособление 103 приводится в движение для совершения углового перемещения вокруг в целом вертикальной оси 124. Когда ингредиенты 106 в чаше 105 приводятся в движение вспомогательным приспособлением 103 (например, яичные белки), верхняя поверхность 107 смеси может быть неровной. Таким образом, получение полноценных результатов измерений объема в реальном масштабе времени в отношении содержимого чаши 105 в процессе работы миксера 100, осуществляемого даже визуально, представляется сложным. Практически любое выполняемое на основе преобразователей измерение объема ингредиентов 106 в чаше 105 также осложняется движением чаши 100 и вспомогательного приспособления 103 в чаше 105.
Взбивание яичных белков в пену должно продолжаться до достижения максимального стабильного объема. Дополнительное взбивание может привести к негативным результатам. Технология предполагает автоматическую остановку работы миксера 100 по взбиванию, после того как стабильный объем достигнут. В этой связи на нижней стороне головки 101 предусмотрен обращенный вниз инфракрасный датчик 109. Датчик 109 направляет луч датчика во внутреннее пространство 125 чаши 105. Датчик 109 испускает луч инфракрасного излучения во внутреннее пространство чаши 105 и обнаруживает отраженное инфракрасное излучение. Датчик 109 подает данные электрического сигнала на процессор 110 миксера пропорционально отраженному излучению. Процессор выполняет расчеты данных инфракрасного сигнала для вычисления величины, характеризующей изменение объема содержимого чаши 105 (ингредиентов 106).
Когда данное возрастающее изменение объема стабилизируется, процесс взбивания считается оконченным и двигатель 102 может быть выключен. Коротко говоря, миксер (100) определяет скользящее среднее значение вертикальной высоты верхней поверхности 107 ингредиентов 106, при этом процессор 110 останавливает процесс взбивания, когда скользящее среднее достигает постоянного значения, указывающего на успешное окончание процесса.
Инфракрасный датчик 109 измеряет интенсивность инфракрасного излучения, отраженного от содержимого чаши 105. Увеличение количества или интенсивности отраженного инфракрасного излучения используется для выведения заключения о расстоянии расположения верхней поверхности 107 содержимого чаши 105 от датчика 109.
Как показано на фиг. 2, датчик 109 аналогичным образом может использоваться для определения того момента, когда в смесительной чаше 105 сформировался комок 200 теста. Датчик 109 может снять базовые показания, определяемые верхней поверхностью 201 исходных ингредиентов 202 в чаше 105 перед началом вымешивания. Работа крюка 203 для замешивания теста приводит к смешиванию исходных ингредиентов 202 в комок. По мере образования комка он поднимается по длине крюка 203 для замешивания теста. Крюк 203 представляет собой устройство, вызывающее движение теста. Процессор 110 использует инфракрасный сигнал для определения скользящего среднего значения приблизительной высоты комка 200 теста. При достижении целевой высоты двигатель 102 может быть либо остановлен, либо продолжать работать в течение дополнительного заданного времени, определяемого пользователем или процессором 110.
На фиг. 3 показана чаша 105, в которой происходит процесс перемешивания. Даже если объем ингредиентов 300 не изменяется, инфракрасный датчик 109 позволяет получить информацию о процессе. Датчик 109 может распознавать изменение отражательной способности верхней поверхности 301. Изменение отражательной способности поверхности 301 может использоваться для заключения о степени перемешивания, которое может передаваться на процессор 110 и использоваться для изменения параметров работы миксера, в том числе скорости перемешивания или рабочего состояния (включен/выключен), исходя из степени перемешивания. Таким образом, могут контролироваться и регулироваться смеси масла и сахара. В смеси масла и сахара твердые частицы сахара растворяются в масляной смеси, что приводит к изменению ее отражательной способности.
На фиг. 4 показана блок-схема алгоритма, иллюстрирующая пример управления процессом вымешивания, составления смеси или взбивания (все вместе “перемешивания”). Следует понимать, что обработка сигнала происходит в процессоре (контроллере) 110 миксера или с помощью вспомогательного процессора и вспомогательной обработки, если это требуется. Первый этап заключается в размещении необработанных пищевых продуктов в чаше 105 миксера и инициации пользователем совместной операции 400 перемешивания и инфракрасного мониторинга. Далее датчик 109 принимает отраженное инфракрасное излучение, в соответствии с которым датчик 109 вырабатывает информационный сигнал, например изменяемое напряжение, характеризующий интенсивность отраженного инфракрасного излучения, этап 401. Поток данных о напряжении от датчика 109 в процессе перемешивания передается на процессор 110. Процессор 110 обрабатывает поток исходных данных, например, со скоростью 100 выборок данных в секунду. Исходные данные, полученные из выходного напряжения датчика 110, можно представить в виде линии, состоящей из групп точек данных в динамике по времени, например, как показано на фиг. 5. Как проиллюстрировано на Фигуре 5, полезные точки данных трудно выделить из шумов. На фиг. 5 показан типовой процесс сбора данных, выполняемый на содержимом чаши 105, в которой яичные белки взбиваются на отрезке времени, составляющем приблизительно 4 минуты 16 секунд.
На этапе 402 процессор 110 обрабатывает исходные данные с помощью программного обеспечения для фильтра низких частот. Этот этап обработки данных важен для отсеивания ненужных динамических данных, таких как сигналы, отраженные вспомогательным приспособлением или проволочным венчиком, ингредиентами, скопившимися на стенках чаши 105, и другими нерелевантными объектами. Цифровой фильтр низких частот получает текущее отфильтрованное значение путем вычитания последнего отфильтрованного значения из текущего значения исходных данных и умножения результата на константу, а затем прибавления последнего отфильтрованного значения. Константа зависит от переменных процесса, таких как скорость протекания заданного процесса, размера чаши 105 и т.д. Показано, что в случае взбивания яичных белков в традиционной чаше 105 полезно использовать константу, значение которой составляет 0,003. Предыдущее или последнее отфильтрованное значение сохраняется в памяти, так что его можно использовать в последующих вычислениях. Текущее отфильтрованное значение характеризует общее количество инфракрасного излучения, отраженного от содержимого чаши 105, а значит, характеризует переменные процесса, такие как степень перемешивания или вертикальная высота ингредиентов в чаше 105. Значение исходных данных получают путем оцифровки выходных аналоговых данных датчика 109. Те же исходные данные, которые изображены на фиг. 5, проиллюстрированы после низкочастотной фильтрации на диаграмме, представленной на фиг. 6.
На следующем этапе процесса, проиллюстрированного на фиг. 4, выполняется операция 403 кондиционирования сигнала для результатов, полученных с помощью низкочастотной фильтрации на этапе 402. На этом этапе производится выборка отфильтрованных данных на заданном временном интервале, например, составляющем 1 секунду в данном примере. На этом этапе осуществляется расчет скользящего среднего значения отфильтрованных данных, чтобы получить более гладкую линию тренда, которая позволит процессору 110 различать и идентифицировать изменения в процессе вымешивания, составления смеси или взбивания. Итоговое скользящее среднее на том же временном интервале, который изображен на фиг. 5 и 6, показано на фиг. 7. Фактическую информацию о процессе получают путем мониторинга изменений скользящего среднего на этапе 404. Процессор 110 получает информацию из скорости изменения скользящего среднего в динамике по времени. Если принять, что скользящее среднее в момент времени t1 составляет A1, а скользящее среднее в момент времени t2 составляет A2, причем t2>t1, скорость изменения во времени скользящего среднего, dD/dt, определяется соотношением (A2-A1)/(t2-t1).
Скорость изменения во времени скользящего среднего вычисляется процессором и сравнивается с искомым значением на этапе 405. Искомое значение может быть получено эмпирически для любого пригодного процесса и любых ингредиентов, находящихся в смесительной чаше 105 и обрабатываемых вспомогательным приспособлением 103. Если скорость изменения скользящего среднего равна или меньше искомого значения, процесс перемешивания может быть остановлен или соответствующим образом изменен. Если сравниваемое значение выше искомого значения, процесс продолжается и осуществляется дополнительный сбор данных 407.
Следует также понимать, что результаты этапа 405 сравнения могут также использоваться для оценки времени, оставшегося до завершения данного процесса, путем сравнения указанного значения с идеализированным значением, хранящимся в памяти процессора.
Следует понимать, что мгновенные или непрерывные данные, предоставляемые инфракрасным датчиком 109, могут использоваться для создания графического отображения процесса в динамике по времени или соответствующего графического оповещения на графическом интерфейсе 111, расположенном в наружной части устройства либо на сетевом устройстве. Эта информация может также непосредственно использоваться процессором для остановки двигателя 102, приостановки двигателя 102 или изменения числа оборотов двигателя.
Хотя изобретение было описано со ссылкой на конкретные примеры, специалисты в данной области техники поймут, что изобретение может быть реализовано во множестве других форм.
В контексте настоящего документа, если не оговорено иное, использование порядковых прилагательных "первый", "второй", "третий" и т.д. для описания общего объекта лишь обозначает ссылку на различные примеры схожих объектов и не подразумевает, что объекты, описанные подобным образом, должны располагаться в заданной последовательности, будь то временной, пространственной, в соответствии с их значимостью или какой-либо иной.
Ссылка в настоящем описании на “один вариант осуществления” или “вариант осуществления”, или “пример” означает, что конкретный признак, структура или характеристика, описанная в связи с вариантом осуществления, входит в состав по меньшей мере одного варианта осуществления настоящего изобретения. Таким образом, появления фраз “в одном варианте осуществления” или “в одном примере” в различных местах данного описания не обязательно относятся к одному и тому же варианту осуществления или примеру, но могут также относится к одному варианту осуществления или примеру. Кроме того, как станет очевидным среднему специалисту в данной области техники из данного раскрытия, конкретные признаки, структуры или характеристики могут объединяться любым подходящим образом в одном или более вариантах осуществления.
Точно так же следует понимать, что в вышеприведенном описании примеров осуществления изобретения различные признаки изобретения иногда сгруппированы вместе в одном варианте осуществления, на одной фигуре или в их описании с целью упрощения раскрытия и способствования пониманию одного или более объектов изобретения. Данный способ раскрытия, однако, не следует толковать как отражающий идею о том, что заявленное изобретение требует больше признаков, чем в явном виде перечислено в каждом пункте формулы изобретения. Скорее, как следует из нижеприведенной формулы изобретения, объекты изобретения заключаются менее чем в полном объеме признаков отдельного раскрытого выше варианта осуществления. Любые пункты формулы изобретения, следующее за Подробным описанием, таким образом, в явном виде включены в это Подробное описание, при этом каждый пункт формулы изобретения занимает самостоятельное положение в качестве отдельного варианта осуществления данного изобретения.
Если специально не оговорено иное, как очевидно из нижеизложенного рассмотрения, следует понимать, что в описании такие термины, как "обработка", "вычисление", "расчет", “определение” и т.п., относятся к действию и/или процессам, выполняемым микропроцессором, контроллером или вычислительной системой, либо аналогичным электронным вычислительным устройством или устройством обработки сигналов, обрабатывающим и/или преобразующим данные.
Кроме того, в то время как некоторые варианты осуществления, описанные в настоящем документе, содержат одни, но не другие признаки, включенные в другие варианты осуществления, предполагается, что комбинации признаков различных вариантов осуществления находятся в пределах объема изобретения и образуют различные варианты осуществления, как понятно специалистам в данной области техники. Например, в нижеследующей формуле изобретения любые из заявленных вариантов осуществления могут использоваться в любом сочетании.
Таким образом, в то время как описаны варианты осуществления изобретения, считающиеся предпочтительными, специалисты в данной области техники поймут, что в них могут быть внесены другие дополнительные изменения без отхода от объема изобретения, при этом подразумевается, что все такие изменения и модификации подпадают под объем изобретения.
В то время как настоящее изобретение раскрыто со ссылкой на конкретные детали конструкции, следует понимать, что они носят иллюстративный характер и не накладывают ограничений на объем изобретения.
Реферат
Изобретение относится к настольному миксеру, обладающему способностью контролировать ход процесса. Обрабатывающее устройство для обработки субстанции, расположенной в контейнере, имеющем внутреннее пространство, включает в себя: устройство, вызывающее движение, располагаемое во внутреннем пространстве контейнера, так что относительное движение между контейнером и устройством приводит к обработке субстанции, электрический двигатель, выполненный с возможностью функциональной связи с контейнером и устройством, чтобы вызывать упомянутое относительное движение, датчик для создания сенсорного луча, направляемого во внутреннее пространство для образования отражения от субстанции во внутреннем пространстве и выработки сигнала, характеризующего отражение, а также контроллер, функционально связанный с датчиком и двигателем для приема сигнала от датчика, с тем чтобы распознавать изменение сигнала, а значит, изменение состояния субстанции в чаше, и изменять работу двигателя, когда контроллер распознал заданное изменение сигнала. Технический результат – обеспечение непрерывного контроля состояния ингредиентов в чаше миксера. 9 з.п. ф-лы, 7 ил.
Комментарии