Обнаружение инструмента для кухонных приборов - RU2689044C2
Код документа: RU2689044C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к кухонным приборам и в частности к кухонным приборам со сменными инструментами.
Уровень техники
Кухонные приборы с электроприводом становятся все более популярными во всем мире. Такие кухонные приборы включают в себя ручные блендеры, блендеры, кухонные комбайны, хлебопечки и миксеры, обычно включающие в себя одно или несколько дополнительных приспособлений, приводимых в движение электродвигателем. Для удовлетворения различных потребностей создаются электробытовые приборы с увеличивающимся количеством применений и функций.
В некоторых кухонных приборах, упомянутое множество функций может быть заключено в одном комплексном устройстве. В таких приборах легко управлять различными функциями и регулировать мощность и скорость двигателя для каждой функции, поскольку пользователь регулирует средство управления так, чтобы выбирать требуемую функцию, и данное средство управления способно не только выбирать требуемую функцию, но и выбирать соответствующие параметры электропривода, такие как скорость электродвигателя, которая в свою очередь влияет на крутящий момент электродвигателя.
При этом многие кухонные приборы включают в себя силовой блок и множество дополнительных приспособлений. Упомянутые дополнительные приспособления могут быть приспособлены к локальным рынкам и кулинарным стилям во всем мире. В таком случае труднее обеспечивать надлежащие параметры электропривода, учитывая большое количество возможных дополнительных приспособлений и функций.
US2013/192477 описывает базовое устройство с электроприводом, которое может быть подсоединено к головной части блендера. Упомянутая головная часть блендера включает в себя магнит, который обнаруживается датчиком на эффекте Холла на упомянутом базовом устройстве с электроприводом, чтобы позволять объединенному блоку выполнять функцию блендера, когда упомянутое базовое устройство с электроприводом обнаруживает головную часть блендера.
Однако данное решение только выбирает между двумя разными рабочими режимами и все-таки требует соответствующей работы пользователя.
Сущность изобретения
Изобретение определяется формулой изобретения.
В соответствии с примерами согласно одному аспекту изобретения, описан силовой блок кухонного прибора, содержащий:
механический интерфейс для подсоединения инструмента;
электродвигатель для вращения механического интерфейса для приведения в движение инструмента;
контроллер для управления упомянутым электродвигателем; и
вибрационный датчик, выполненный с возможностью измерения вибраций инструмента, соединенного с механическим интерфейсом, причем упомянутый вибрационный датчик соединен с контроллером для передачи в контроллер информации, характеризующей измеряемую вибрацию;
причем упомянутый контроллер выполнен с возможностью определения того, какой из множества категорий инструмента подсоединен к силовому блоку, на основании информации о измеряемой вибрации.
Посредством использования вибрационного датчика в силовом блоке можно получать информацию обратной связи о работе инструмента во время использования, не требуя, чтобы инструмент содержал какие-либо электрические соединения, датчики или электронное оборудование, такое как метки радиочастотной идентификации. Подходы, использующие такие метки, механическое прямое соединение или электрическое прямое соединение, являются в частности чувствительными к грязи, остаткам пищи или чистящим средствам. Кроме того, уплотнение таких подходов увеличивает сложность и стоимость потенциального решения. Следовательно, объединение таких соединений, датчиков или оборудования в инструменте обычно нежелательно и может приводить к увеличенной стоимости инструмента, в частности когда инструменты требуют промывания и в частности должны быть пригодными для мытья в посудомоечной машине.
Таким образом, решение с использованием вибрационного датчика устраняет необходимость в каких-либо пользовательских средствах управления, таких как ручки, кнопки или переключатели, соединенные с контроллером, чтобы обеспечивать для пользователя выбор нужной настройки для силового блока. В таком сравнительном примере пользователь прикрепляет дополнительное приспособление к механическому соединению и приводит в действие пользовательские средства управления для выбора нужной настройки для силового блока. Однако данный сравнительный пример требует, чтобы выбранная пользователем настройка была надлежащей. Можно считать, что инструкции по применению, краткие практические руководства или наглядные схемы на изделии могут быть использованы для того чтобы помочь пользователю выбирать нужную комбинацию настройки на силовом блоке с соответствующим дополнительным приспособлением. К сожалению, данный подход может приводить к запутыванию потребителя. В самом деле, не все пользователи читают инструкции по применению или краткие практические руководства, и даже те, которые читают инструкции, могут ошибаться. Таким образом, могут быть выбраны ненадлежащие комбинации настройки электропривода и дополнительного приспособления, приводящие к неудовлетворительным результатам, жалобам пользователей и даже возвратам товара.
В отличие от этого, вибрационный датчик способен передавать информацию обратной связи об инструменте, не требуя никаких действий от пользователя или выбора средства управления на силовом блоке кухонного прибора.
Силовой блок кухонного прибора может включать в себя переключатель «включено-выключено». Кроме того, силовой блок кухонного прибора может включать в себя элемент управления скоростью. Таким образом, силовой блок кухонного прибора должен содержать только простые элементы управления для приведения в действие.
Силовой блок кухонного прибора может также содержать выключатель для управления функцией измерения вибрации, в частности для переключения данной функции в связи с включением и выключением вибрационного датчика. Это может обеспечивает работу силового блока кухонного прибора под управлением пользователя при необходимости.
Контроллер может содержать память, хранящую информацию о множестве категорий инструмента и соответствующих режимах приведения, причем контроллер приспособлен для приведения в действие двигателя по режиму приведения, выбираемому из множества режимов на основе определяемой категории инструмента. Это позволяет приводить в действие каждый инструмент согласно надлежащему режиму. Например, некоторые инструменты могут требовать более низкой приводной скорости и/или более высокого крутящего момента, чем другие инструменты, другие инструменты могут требовать шагового или импульсного привода.
Контроллер может представлять собой бесщеточный электродвигатель. Используя такой электродвигатель, можно независимо выбирать как скорость, так и крутящий момент.
Кроме того, контроллер может быть приспособлен для динамической адаптации привода двигателя на основе информации о вибрации. Таким образом, привод инструмента может быть адаптирован в зависимости от свойств материалов, подвергаемых обработке.
Силовой блок может содержать корпус, при этом упомянутый механический интерфейс проходит через упомянутый корпус. Для более эффективного измерения вибраций вибрационный датчик может быть расположен в упомянутом корпусе в пределах или рядом с механическим интерфейсом.
В вариантах осуществления, механический интерфейс включает в себя вал, проходящий через упомянутый корпус, и упомянутый вибрационный датчик может быть установлен рядом с упомянутым валом.
Вибрационный датчик может представлять собой пьезоэлектрический преобразователь.
Другой аспект изобретения относится к набору для кухонного прибора, содержащему:
силовой блок, содержащий: механический интерфейс для подсоединения инструмента; электродвигатель для вращения механического интерфейса для приведения в движение инструмента; контроллер для управления электродвигателем; и вибрационный датчик, выполненный с возможностью измерения механических вибраций инструмента, подсоединенного к механическому интерфейсу, причем вибрационный датчик подсоединен к контроллеру для передачи в контроллер информации, характеризующей измеряемую вибрацию; и
множество инструментов для подсоединения к механическому интерфейсу;
причем каждая категория инструмента, когда ее подсоединяют к силовому блоку, вибрирует по-разному; и контроллер выполнен с возможностью опознания того, какой из множества категорий инструментов подсоединен к силовому блоку, исходя из информации об измеряемой вибрации. Отмечается, что упомянутые категории инструментов могут содержать только один инструмент, т.е. отдельные инструменты могут быть выполнены с возможностью вращения по-разному.
Каждый инструмент может быть выполнен с возможностью вибрации с собственными колебаниями, соответствующими категории инструмента, причем каждая категория инструмента имеет разные собственные колебания.
В некоторых случаях, данные собственные колебания могут представлять собой резонансные частоты деталей инструмента или всего инструмента. В других случаях, резонансные частоты могут быть непригодными, и могут быть выбраны другие характеристические пики. Это возможно в частности для устройств, которые требуют значительной механической энергии, таких как соковыжималки.
Контроллер может быть выполнен с возможностью выбора режима приведения для электродвигателя на основе определяемой категории инструмента или отдельного инструмента среди упомянутого множества категорий инструментов.
Каждый из инструментов может быть выполнен так, чтобы иметь собственные колебания в аксиальном или радиальном направлении относительно оси вращения механического интерфейса, когда инструмент подсоединен к силовому блоку и приводится в действие электродвигателем.
В другом аспекте, изобретение относится к способу приведения в действие кухонного прибора, содержащего силовой блок с электродвигателем и по меньшей мере один инструмент, выполненный с возможностью отсоединения, причем согласно способу:
подсоединяют инструмент к силовому блоку;
приводят в действие электродвигатель для приведения в движение инструмента;
измеряют вибрации инструмента с использованием вибрационного датчика в силовом блоке; и
определяют категорию инструмента исходя из упомянутых вибраций.
Упомянутый способ может дополнительно включать выбор режима приведения из множества режимов на основе определяемой категории инструмента; и приведение в действие электродвигателя в соответствии с выбранным типом привода.
Этап приведения в действие электродвигателя в соответствии с выбранным режимом приведения может включать динамическую адаптацию привода электродвигателя на основе измеряемых вибраций.
Краткое описание чертежей
Примеры изобретения будут подробно описаны ниже со ссылкой на прилагаемые чертежи, из которых:
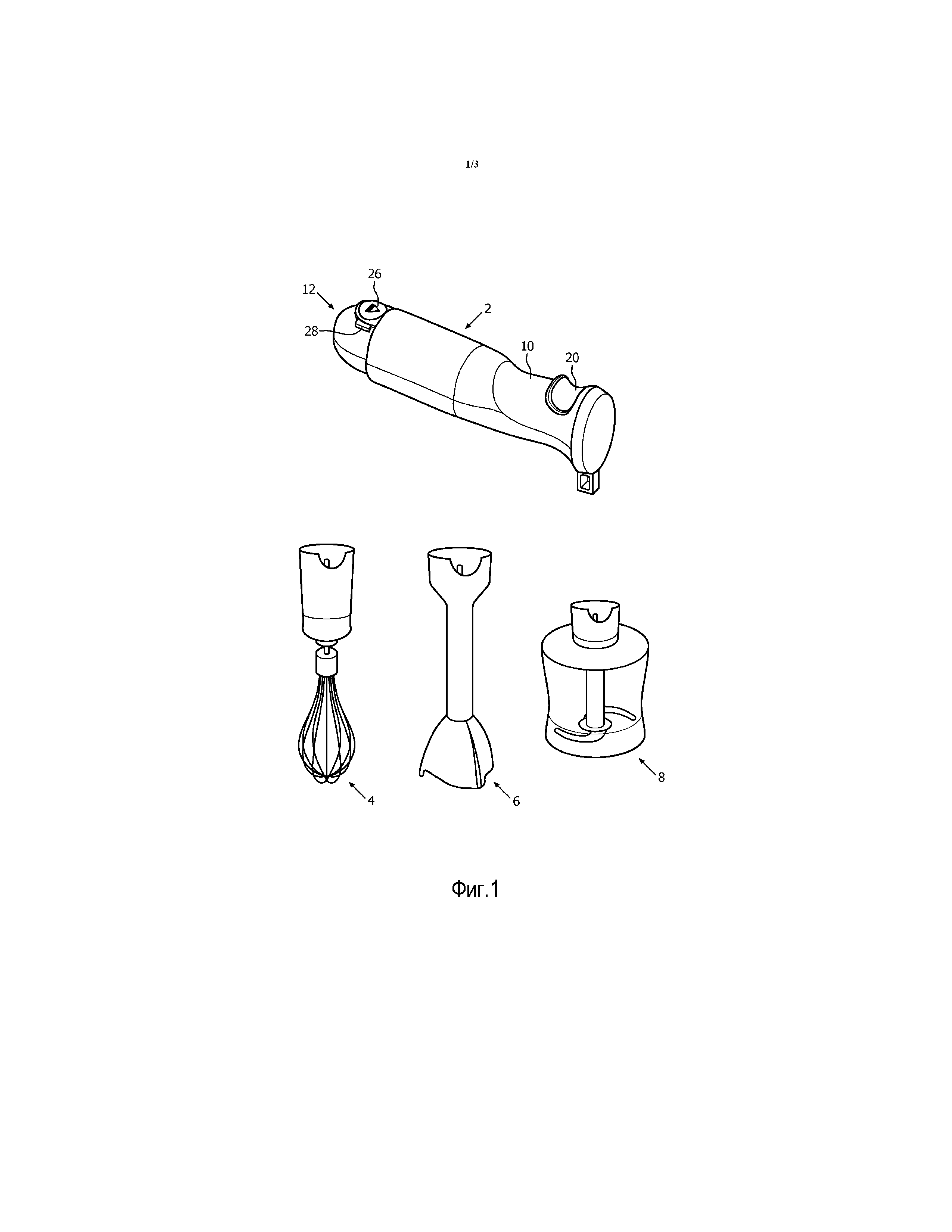
Фиг.1 представляет собой комплект, содержащий кухонный прибор и множество инструментов;
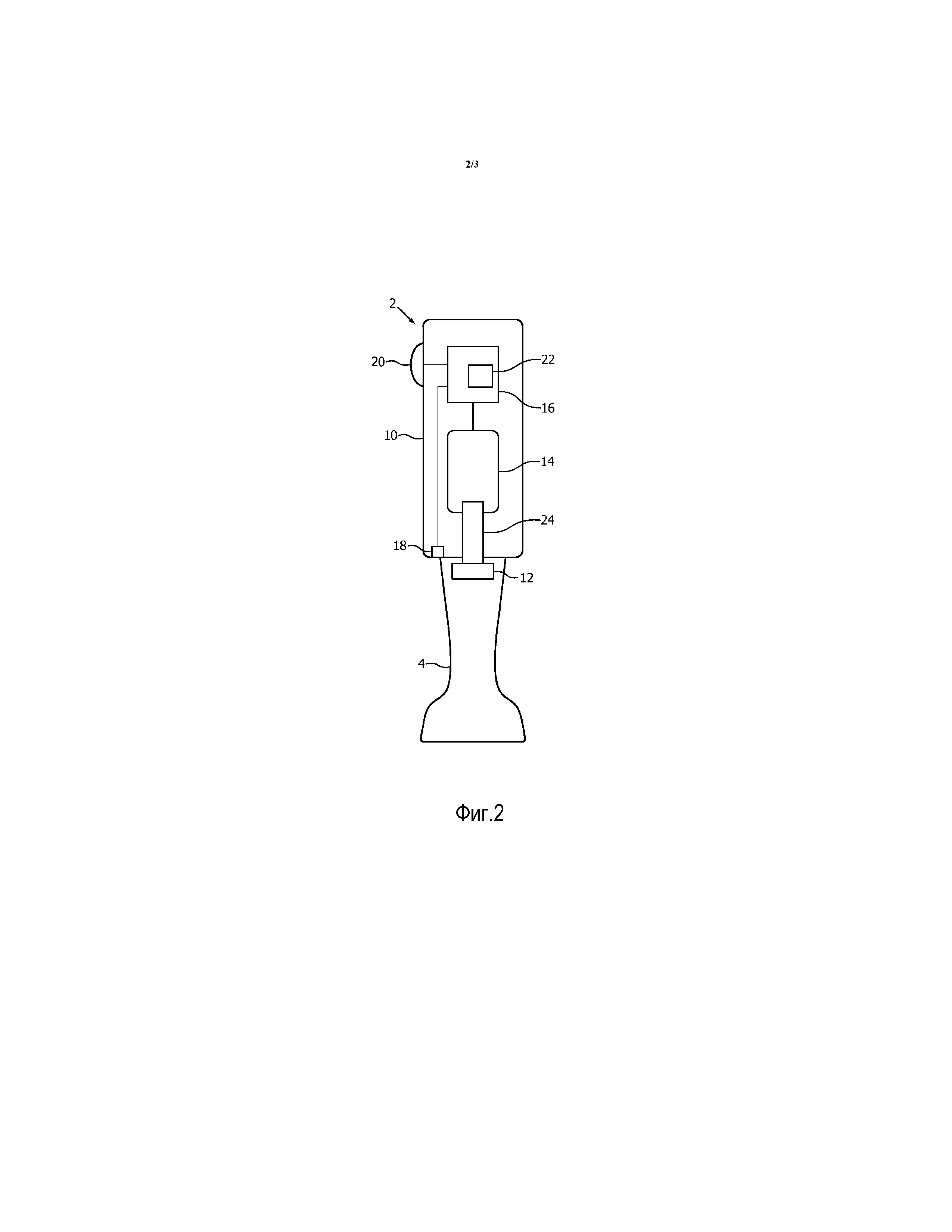
Фиг.2 представляет собой схему силового блока с прикрепленным инструментом;
Фиг.3 представляет собой блок-схему приведения в действие силового блока.
Подробное описание вариантов осуществления
Изобретение представляет собой кухонный прибор с электроприводом.
На фиг.1 и 2 силовой блок 2 обеспечивает электроэнергию для одного из нескольких инструментов 4, 6, 8. В данном примере силовой блок 2 представляет собой силовой блок ручного блендера. Упомянутые инструменты включают в себя насадку-измельчитель 4, насадку-взбивалку 6 и насадку 8 для образования кухонного комбайна, причем последняя включает в себя чашу, нож и переходник, для того чтобы обеспечить вращение ножа в чаше для обработки пищевого продукта силовым блоком 2.
Силовой блок 2 содержит корпус 10 и включает в себя соединительный элемент 12, который представляет собой механический интерфейс для соединения привода вращения с одним из инструментов. Инструменты 4, 6, 8 выполнены с возможностью разъемного прикрепления, так чтобы инструменты можно было прикреплять и отсоединять от силового блока 2. В данном примере, для прикрепления инструмента 4, 6, 8 к силовому блоку 2 используются наружные фиксирующие лапки, и инструмент может быть высвобожден посредством приведения в действие переключателя разъединения, который втягивает назад фиксирующую лапку 28, высвобождая инструмент.
Предусмотрен электродвигатель 14, который механически соединен с соединительным элементом 12 и таким образом сообщает вращательное движение вращающейся части инструмента 4, 6, 8, соединенной с упомянутым соединительным элементом. Электродвигатель 14 приводится в действие посредством контроллера 16.
Для измерения вибрации на упомянутом корпусе рядом с соединительным элементом 12 установлен вибрационный датчик 18. Вибрационный датчик электрически соединен с контроллером 16, для того чтобы передавать в контроллер сигнал, характеризующий измеряемую вибрацию. В данном примере вибрационный датчик 18 представляет собой пьезоэлектрический преобразователь. В качестве альтернативы, вибрационный датчик может быть встроенным в контроллер 16.
Предусмотрен переключатель «включено-выключено» 20, соединенный с контроллером.
Контроллер 16 запрограммирован так, чтобы приводить в действие электродвигатель 14 по множеству типов привода. Типы привода могут различаться по скорости вращения и приложенному крутящему моменту. Некоторые типы привода могут включать шаговый или импульсный привод. Типы привода хранятся в памяти 22 контроллера.
Память 22 хранит множество типов вибрации, связанных с соответствующими категориями инструментов. Контроллер запрограммирован так, чтобы принимать сигналы из вибрационного датчика 18 и на основе данных сигналов определять, какая категория инструмента прикреплена. Например, инструменты могут быть выполнены с разной собственной резонансной частотой для аксиальной вибрации для каждой категории инструмента, и контроллер запрограммирован так, чтобы определять резонансную частоту и соответственно категорию инструмента.
В альтернативных вариантах осуществления, для определения инструментов и/или категорий инструмента могут быть использованы более сложные характеристики, чем простая резонансная частота.
Контроллер может выбирать надлежащий режим приведения для электродвигателя на основе определяемой категории инструмента или отдельного инструмента. В частности, контроллер может регулировать напряжение привода или скорость привода. Для некоторых определяемых категорий инструментов или инструментов контроллер может обеспечивать импульсный режим электропривода.
В показанном варианте осуществления, инструменты разделены на четыре возможные категории инструментов. Каждый инструмент отнесен к некоторой категории. Таким образом, после изготовления двигательного блока кухонного прибора можно добавлять дополнительные приспособления, поскольку любой новый инструмент может быть отнесен к одной из упомянутых категорий для надлежащего приведения в движение.
Упомянутые виды представляют собой:
(а) Скоростные приводные инструменты с низким крутящим моментом;
(b) Инструменты с коротким периодом работы с высоким крутящим моментом;
(с) Инструменты с длительным периодом работы; и
(d) Инструменты с максимальной механической мощностью.
Приведение в движение инструмента может определяться категорией. Например, инструмент в категории (с) должен приводиться в движение в режиме, в котором скорость и крутящий момент обеспечивают минимальную потерю мощности, чтобы предотвратить перегрев, тогда как инструмент в категории (b) должен приводиться в движение с максимальным крутящим моментом, а инструмент в категории (а) с высокой скоростью.
Отмечается, что вышеприведенный перечень категорий не является исчерпывающим и могут быть использованы другие категории. В частности, если конкретный инструмент требует другой работы по отношению к работе конкретной категории, то данный инструмент может быть эффективно определен как дополнительная категория с данным инструментом в качестве единственного элемента данной категории. Таким образом, обеспечивается эксплуатационная гибкость.
Отмечается, что привод инструмента связан с вращением соединительного элемента 12 вокруг оси, и поэтому вибрации в аксиальном направлении являются особенно пригодными для измерения и для определения категории инструмента.
В предпочтительном варианте осуществления изобретения, предусмотрена набор, содержащая силовой блок и множество разных инструментов.
Каждый категория инструмента приспособлена для создания соответствующего типа вибрации. В качестве альтернативы, каждый из инструментов может быть приспособлен для генерирования особенного типа вибрации.
Одним подходом для приспосабливания вибрации инструмента 4, 6, 8 так, чтобы иметь требуемую характеристику, является приспосабливание жесткости инструмента так, чтобы инструмент имел характеристическую резонансную частоту, соответствующую данной категории инструмента. Для каждой категории инструмента может быть выбрана разная характеристическая резонансная частота, и данная частота обнаруживается в типе вибрации.
Альтернативные подходом является создание инструмента с отдельным участком или частью с резонансной частотой, к тому же характеристической резонансной частотой, соответствующей конкретной категории инструмента.
Другой альтернативой является использование не только резонансных частот, но и использование других вибраций, которые возникают при работе оборудования.
Кроме того, вместо создания дополнительных элементов, можно также предусмотреть демпфирование конкретных частот в конкретных направлениях, чтобы обеспечить дополнительную возможностью определять большое разнообразие разных типов вибрации для кодирования большого разнообразия категорий инструмента.
В блок-схеме на фиг.3 схематично показана работа контроллера.
Сначала пользователь прикрепляет требуемый инструмент к соединительному элементу 12. Затем пользователь приводит в движение переключатель «включено-выключено» 20, чтобы включить кухонный прибор с электроприводом.
Затем контроллер приводит в движение инструмент по типу привода, используемому по умолчанию, который может быть с относительно низкой скоростью.
Вибрационный датчик 18 воспринимает возникающие в результате вибрации и передает информацию обратно в контроллер в виде данных о вибрации. Затем контроллер сравнивает возникающие в результате вибрации с множеством типов вибраций, хранимых в памяти, и определяет тип вибрации, который ближе всего подходит к данным вибрациям. Каждый тип вибрации связан с конкретной категорией инструмента, и контроллер определяет категорию инструмента из определяемого типа вибрации. Может быть предусмотрен больше чем один тип вибрации для каждой категории инструмента, поскольку обнаруживаемые вибрации могут зависеть не только от инструмента, но и от продукта питания, подвергаемого в данный момент обработке данным инструментом.
Затем контроллер приводит в действие электродвигатель, используя режим приведения, соответствующий определяемой категории инструмента.
В случае постоянного магнита или универсального электродвигателя типы привода могут в частности соответствовать настройкам скорости в зависимости от времени, которые затем определяют допустимый крутящий момент.
В альтернативной конструкции используется электродвигатель, который позволяет осуществлять независимое управление как скоростью, так и крутящим моментом, такой как бесщеточный электродвигатель. В этом случае режим приведения определяет как настройки скорости, так и настройки крутящего момента.
Отмечается, что режим приведения необязательно должен быть постоянным для каждого инструмента или категории инструмента. Контроллер может со временем регулировать режим приведения на основе измеряемого типа вибрации. Например, тип вибрации может показывать, насколько велико сопротивление движению инструмента, и режим приведения может быть отрегулирован в зависимости от данной величины сопротивления. Поскольку сопротивление движению изменяется, тип вибрации может изменяться, и это может быть использовано для соответствующего регулирования типа привода.
Таким образом, посредством приведения в действие электродвигателя с множеством разных типов привода привод электродвигателя может быть адаптирован для каждого инструмента и, возможно, условий, под воздействием которых работает инструмент. Посредством приведения в движение инструмента с надлежащим типом привода может быть установлена надлежащая скорость вращения и крутящий момент для работы данного инструмента.
Кроме того, отмечается, что режим приведения может подвергаться регулированию непрерывно или с интервалами, например, каждые 0,1-60 секунд, обычно каждые 1-10 секунд. Таким образом, для регулирования электродвигателя соответственно может быть использовано изменение вибраций, определяемое по нагреванию электродвигателя или изменению пищевого продукта.
Таким образом, электродвигатель работает в надлежащем рабочем диапазоне, приводящем к меньшим потерям мощности (тепла) и, следовательно, более длительным периодам работы.
В некоторых случаях можно упростить конструкции инструментов. Некоторые инструменты, приспособленные для использования с электродвигателем, имеющим фиксированную скорость вращения, требуют редуктора для регулирования упомянутой фиксированной скорости вращения двигателя до нужной скорости для работы инструмента. Посредством измерения, какой инструмент подсоединен к электродвигателю, электродвигатель может быть приведен в действие с надлежащей скоростью, чтобы соответствовать инструменту и устранить необходимость в редукторе.
В некоторых случаях можно обеспечить улучшенную работу инструмента. Выбор надлежащей скорости привода и крутящего момента посредством упомянутого типа привода можно сочетать с зубчатой передачей в инструменте, чтобы оптимизировать рабочий режим электродвигателя посредством оптимального выбора зубчатой передачи инструмента не на основе фиксированной скорости работы электродвигателя, а на основе оптимальной скорости работы электродвигателя, чтобы улучшить работу. Это может быть полезно вообще, а в частности для жестких пищевых продуктов, используемых в длительных операциях, при которых потери мощности и тепла становятся важными ограничивающими условиями. Данный подход особенно полезен в сочетании с электродвигателем, для которого скорость и крутящий момент можно регулировать независимо, таким как бесщеточный электродвигатель.
Кроме того, инструменты предпочтительно не требуют внесения никаких электронных элементов, таких как метка радиочастотной идентификации (radio frequency identification - RFID). Такие метки могут быть непригодны для посудомоечных машин и к тому же увеличивают стоимость изготовления инструмента, поскольку такую метку обычно нужно вмонтировать в инструмент. Однако такие метки не исключены, если они требуются по другим соображениям.
Упомянутая система не требует предварительного конфигурирования, поскольку новым инструментом могут быть приписаны свойства существующего инструмента или категории инструмента.
Нет необходимости, чтобы механический интерфейс прикреплял инструмент к силовому блоку 2. Все что нужно это механический интерфейс, который может позволять силовому блоку приводить в движение разные инструменты.
Кроме того, привод инструмента может под адаптируемым. Многие пищевые продукты изменяются во время обработки - в этом случае сопротивление движению может уменьшаться, например, при измельчении овощей после того, как овощи уже превратились в мелкие кусочки, или увеличиваться, например, при взбивании яиц. Посредством измерения вибраций с использованием вибрационного датчика 18 контроллер может адаптировать привод, например, посредством замедления скорости привода, когда сопротивление движению увеличивается.
Использование адаптируемого привода, который может быть приведен в действие по надлежащему типу привода для каждого инструмента, облегчает использование множества разных инструментов, которые могут быть пригодны для разных способов приготовления пищи и соответственно быть приспособлены для продажи в разных регионах, странах или с разными установленными ценами.
Кроме того, отмечается, что способ обработки сигналов из приводного блока может быть разным. Вместо множества вибрационных характеристик и типов привода разных категорий инструмента, хранимых в памяти, могут быть использованы альтернативные способы, которые используют данные о вибрации для определения свойств инструмента и адаптации скорости и/или крутящего момента электродвигателя.
Для упрощения корректировки контроллера, типы привода разных инструментов могут храниться не в памяти 22 контроллера, а в дополнительной микросхеме памяти. Это позволяет пополнять дополнительную микросхему памяти новыми типами привода, чтобы упрощать изменение типов привода со временем без необходимости перепроектирования всего контроллера 16.
Дополнительной возможностью является создание в контроллере 16 цифрового/интернет соединения, чтобы обеспечить загрузку в силовой блок обновленных типов привода или типов вибрации. Это обеспечивает автоматическое обновление для использования новых типов инструмента после изготовления силового блока 2.
Кроме того, дополнительные датчики могут быть использованы или объединены с информацией о вибрации для выбора типа привода. Например, может быть предусмотрен датчик температуры. Данный датчик может обнаруживать, например, пар, выделяемый пищевым продуктом, и соответствующим образом регулировать обработку.
Другие изменения в раскрытых вариантах осуществления могут быть понятны и осуществлены специалистами в данной области техники при реализации заявленного изобретения, на основе изучения чертежей, описания изобретения и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, и термины в единственном числе не исключают множества. Тот факт, что некоторые признаки упоминаются во взаимно разных зависимых пунктах формулы, не означает, что не могут быть успешно использованы комбинации данных признаков. Любые ссылочные позиции в формуле изобретения не должны толковаться как ограничивающие объем изобретения.
Реферат
Предложен кухонный прибор, содержащий силовой блок 2 и сменный инструмент 4, подсоединяемый через механический интерфейс 12. Контроллер 16 управляет электродвигателем 14, приводящим в движение инструмент 4 через механический интерфейс. Вибрационный датчик 18 определяет вибрации инструмента и передает данные о вибрации в контроллер 16. Контроллер может использовать данные о вибрации для опознавания упомянутого инструмента и/или выбора соответствующего типа привода на основе воспринимаемой вибрации. 3 н. и 10 з.п. ф-лы, 3 ил.
Комментарии