Беспроводное устройство для приготовления горячих напитков - RU2428913C1
Код документа: RU2428913C1
Чертежи

















Описание
Область техники, к которой относится изобретение
Рассматриваемая технология относится к беспроводным электрическим чайникам и, в частности, к беспроводным электрическим чайникам с передачей данных между чайником и подставкой.
Уровень техники
Известны беспроводные электрические чайники, которые могут быть отделены от своих подставок и получают энергию через эти подставки. Однако большинство имеющихся на рынке чайников такого типа не предлагают каких-либо более сложных управляющих функций, чем простое включение/выключение. В то же время, было бы желательно иметь какие-то дополнительные «функции управления», включая управление температурой или выбор типа напитка, приготавливаемого в чайнике. В беспроводном чайнике для передачи энергии между колбой и подставкой может быть использован трехполюсный разъем. Этот трехполюсный разъем передает энергию от подставки нагревательному элементу колбы.
В некоторых ситуациях желательно иметь еще какие-то доступные пользователю органы управления помимо включения питания. Например, полезно иметь регулируемую пользователем установку температуры для заваривания чая. Для удобства реализации дополнительных доступных пользователю функций управления в существующих чайниках с трехполюсными разъемами алгоритм управления и кнопки интерфейса пользователя приходится размещать на колбе. Однако расположение клавиш интерфейса пользователя на колбе создает определенные неудобства для пользователя и ограничивает гибкость при проектировании чайника.
Цель и краткое изложение существа изобретения
Таким образом, целью настоящего изобретения является создание возможности передачи данных между корпусом чайника и подставкой для подачи питания чайнику.
Другой целью настоящего изобретения является создание возможности для пользователя управлять функциями или параметрами, например температурой, через подставку для подачи питания беспроводному чайнику.
Еще одной целью некоторых вариантов настоящего изобретения является создание механизма оценки точки кипения в беспроводном чайнике.
Желательно также в независимых от ориентации чайниках создать доступные пользователю органы управления в подставке чайника, используемой для подачи энергии.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения изложение ведется со ссылками на следующие чертежи, на которых:
фиг.1 представляет вид в перспективе сечения беспроводного электрического чайника, в котором возможна передача данных между колбой чайника и подставкой;
фиг.2(а) представляет разобранный вид в перспективе, показывающий компоненты, участвующие в связи по силовым проводам через трехполюсный разъем;
фиг.2(b) представляет разобранный вид в перспективе, показывающий компоненты, участвующие в связи по силовым проводам через пятиполюсный разъем;
фиг.3 представляет разобранный вид в перспективе, показывающий компоненты, участвующие в радиосвязи;
фиг.4 представляет разобранный вид в перспективе, показывающий компоненты, участвующие в инфракрасной связи;
фиг.5(а) представляет разобранный вид в перспективе, показывающий компоненты, участвующие в электромагнитной связи;
фиг.5(b) представляет разобранный вид в перспективе, показывающий пример относительного пространственного расположения электромагнитных передатчиков и электромагнитных приемников;
фиг.6 представляет график зависимости температуры кипения воды от высоты над уровнем моря;
фиг.7 представляет вид в перспективе варианта беспроводного электрического чайника, которым можно безопасно пользоваться на разных высотах;
фиг.8 представляет схему трехполюсного соединения между подставкой и колбой;
фиг.9 представляет схему передатчика;
фиг.10 представляет схему приемника;
фиг.11(а) представляет форму сигнала высокочастотной несущей, модулированной данными;
фиг.11(b) представляет форму демодулированного сигнала данных;
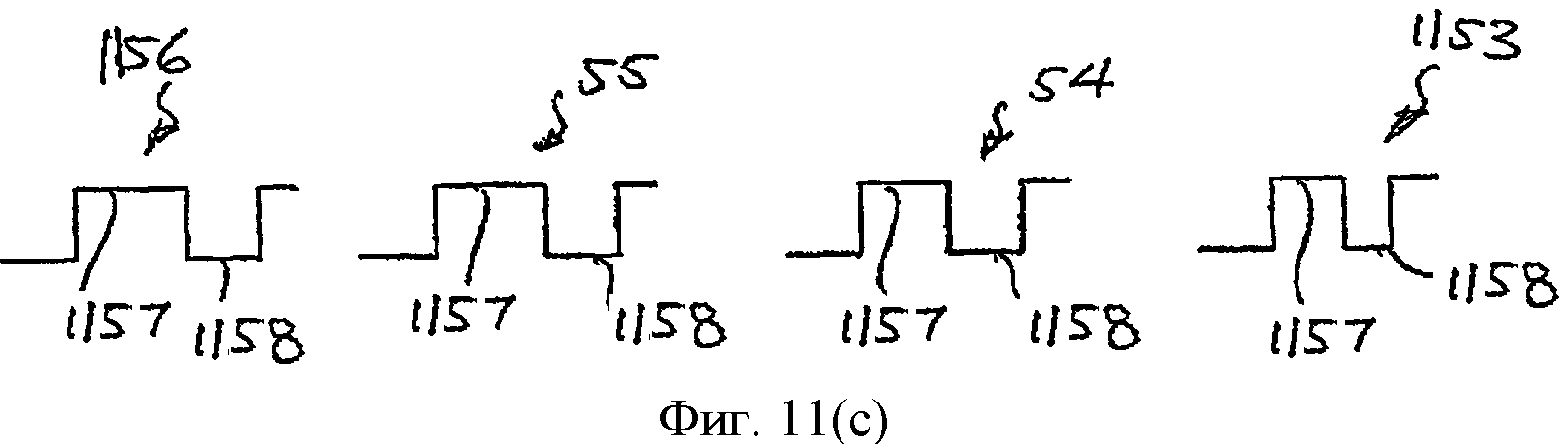
фиг.11(с) представляет форму импульса логического «0», импульса логической «1», импульса стартового бита и импульса конечного бита;
фиг.11(d) представляет пример переданных данных;
фиг.12 представляет схему развязывающего устройства;
фиг.13 представляет схему усилителя;
фиг.14 представляет схему фильтра верхних частот;
фиг.15 представляет схему приемника;
фиг.16 представляет схему колбы;
фиг.17 представляет схему подставки;
фиг.18 представляет блок-схему программного управления в подставке;
фиг.19 представляет блок-схему программного управления в колбе; и
фиг.20 представляет блок-схему способа предотвращения кипячения чайника в отсутствие воды.
Подробное описание изобретения
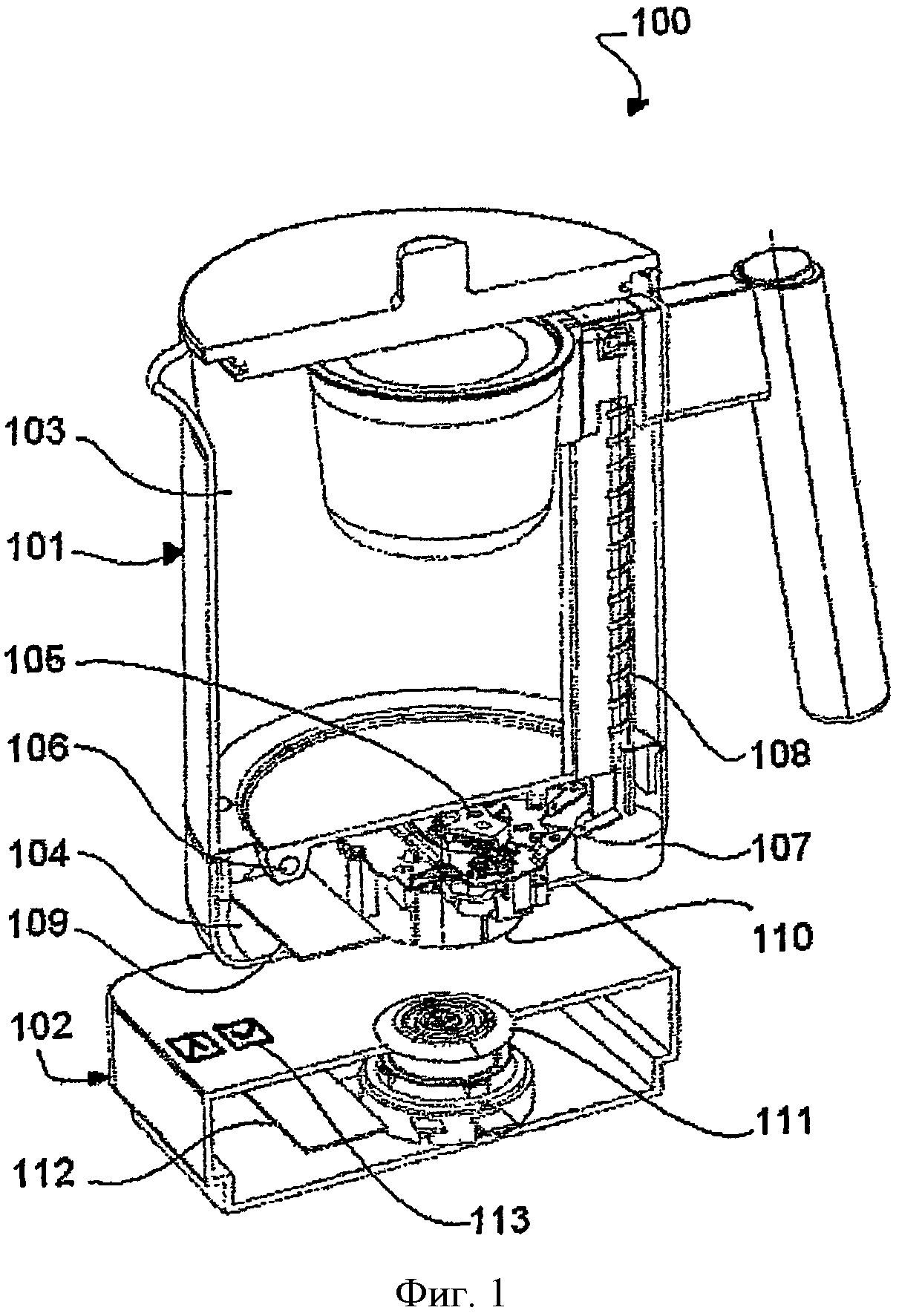
Как показано на фиг.1, беспроводный чайник или устройство 100 для приготовления горячих напитков имеет корпус (или «колбу») 101, устанавливаемый сверху на подставке 102 для подачи энергии. Чайник предпочтительно может работать независимо от угловой ориентации корпуса относительно подставки для подачи питания. В настоящем описании чайник такого типа именуется «360°-чайник» или «независимый от ориентации», тогда как чайник, требующий для работы фиксированной ориентации колбы относительно подставки, именуется «чайник с фиксированной ориентацией».
Корпус, в свою очередь, разделен на жидкостный отсек 103 и (сухой) отсек 104 управления. В отсеке 104 управления размещены такие компоненты, как датчики 105 температуры, процессоры или микропроцессорные контроллеры (MCU) - при необходимости, и нагревательные элементы 106. Если рассматриваемое устройство предназначено для приготовления или заваривания чая, в жидкостном отсеке 103 или отсеке 104 управления могут располагаться также другие механизмы, связанные с завариванием, такие как двигатель 107 и транспортер 108, позволяющие, например, погрузить чайные листья в воду. В отсеке 104 управления находится также печатная плата 109, либо другая подходящая схема или процессор и т.п. (все вместе обозначенные для удобства «плата РСВ»), питаемые через верхний соединитель 110, позволяющий осуществлять программное и/или логическое управление или управление питанием указанных выше компонентов.
В нижней стенке отсека управления выполнено углубление или отверстие. Подставка 102 для подачи питания соединена с розеткой электросети и служит опорой для выступающего нижнего соединителя 111 или компонента разъема, входящего в указанное углубление. Нижний соединитель 111 может быть соединен с верхним соединителем 110 или разъемом и образует электрический контакт с верхним соединителем 110, когда подставка 102 для подачи питания собрана с колбой 101. Эта колба обеспечивает поступление энергии к различным компонентам, размещенным в отсеке 104 управления.
В варианте, показанном на фиг.1, в подставке 102 для подачи питания находится вторая плата РСВ 112, которая может быть электрически соединена с нижним соединителем 111 и приспособлена для установления соединения передачи данных с первой платой РСВ 109. Подставка 102 для подачи питания содержит также наружные органы 113 управления, доступные пользователю, и другие элементы, например электронный дисплей для представления переменных и выбираемых пользователем настроек для задания вида напитка, температуры или оставшегося времени приготовления.
Поскольку в подставке 102 для подачи питания могут в общем случае находиться меньше компонентов, чем в отсеке 104 управления, размещение второй платы РСВ 112 в подставке 102 для подачи питания обеспечивает повышенную степень гибкости при проектировании компоновки доступных пользователю органов управления и цифровых дисплеев.
Пользователь может управлять работой беспроводного чайника через подставку для подачи питания. Вторая плата РСВ 112 кодирует параметры управления в виде сигналов данных, передаваемых плате РСВ 109 в колбе через соединители 110, 111. Плата РСВ 109 колбы затем декодирует эти сигналы для выделения команд, прямо или косвенно управляющих работой различных компонентов, таких как двигатель, термистор или нагревательный элемент, в отсеке управления. Предпочтительно, чтобы передача данных между платами РСВ происходила в обоих направлениях, обеспечивая возможность передачи сигналов обратной связи от верхней платы РСВ к нижней плате РСВ. Ниже описаны варианты, использующие различные способы передачи данных.
В варианте, показанном на фиг.2(а), первая и вторая платы РСВ 201, 202 связаны путем передачи высокочастотных сигналов по силовым проводам. Эти первая и вторая платы РСВ 201, 202 соединены соответственно с верхним соединителем 203 в отсеке управления и с нижним соединителем 204 в подставке для подачи питания. Таким образом, сигналы данных и электроэнергия используют одно и то же физическое соединение.
В случае 360°-чайника оба соединителя, верхний и нижний, могут быть, например, обычными соединителями с тремя или пятью контактами (т.е. с тремя или пятью «полюсами»). В качестве соединителей можно использовать изделия по каталогу таких производителей, как Strix или Otter (но не ограничиваясь этими).
В примере, показанном на фиг.2(а), оба соединителя - верхний 203 и нижний 204, имеют каждый по три круговых полюса. Все три полюса нужны, например, нагревательному элементу 205. Тогда как два из этих полюсов используются нагревательным элементом, третий полюс нужен в качестве заземления. Изменяя форму напряжения питания в соединениях 209, 210, 211, можно передавать сигналы связи между платами РСВ 201, 202. Это можно сделать, например, изменяя коэффициент заполнения включено-выключено напряжения, передаваемого через соединения 209, 210, 211. Параметры или входные сигналы или запросы, вводимые пользователем посредством доступных ему органов управления 206, можно интерпретировать и преобразовать в команды управления или команды обратной связи для компонентов, например нагревательного элемента 205, двигателя 207 и термистора 208.
Как показано на фиг.2(b), верхний и нижний соединители 212, 213 могут каждый представлять собой пятиполюсный соединитель. Вместо изменения коэффициента заполнения сигнала в трех соединениях 214, 215, 216, используемых различными компонентами чайника, платы РСВ 217, 218 непосредственно поддерживают связь одна с другой с использованием двух дополнительных полюсов 219, 220 в качестве линий передачи данных. Нижняя плата РСВ 218 преобразует параметры, например заданную предельную температуру жидкости в чайнике, введенную доступным пользователю органом 221 управления, в команды управления для компонентов, например нагревательного элемента 222 и двигателя 223. Эти параметры передают верхней плате РСВ 217 с использованием контактов передачи данных, образованных дополнительными полюсами 219, 220 нижнего соединителя и соответствующими им полюсами верхнего соединителя. После этого верхняя плата РСВ 217 передает соответствующие команды, энергию или сигналы различным компонентам. Аналогично верхняя плата РСВ 217 кодирует выходные сигналы термистора 224 в виде команд обратной связи и передает эти команды обратной связи прямо нижней плате РСВ 218 через два полюса 219, 220 передачи данных.
Хотя на фиг.2(b) показано, что для передачи данных использованы два крайних контакта 219, 220, следует понимать, что для этих целей можно использовать любые два из пяти контактов.
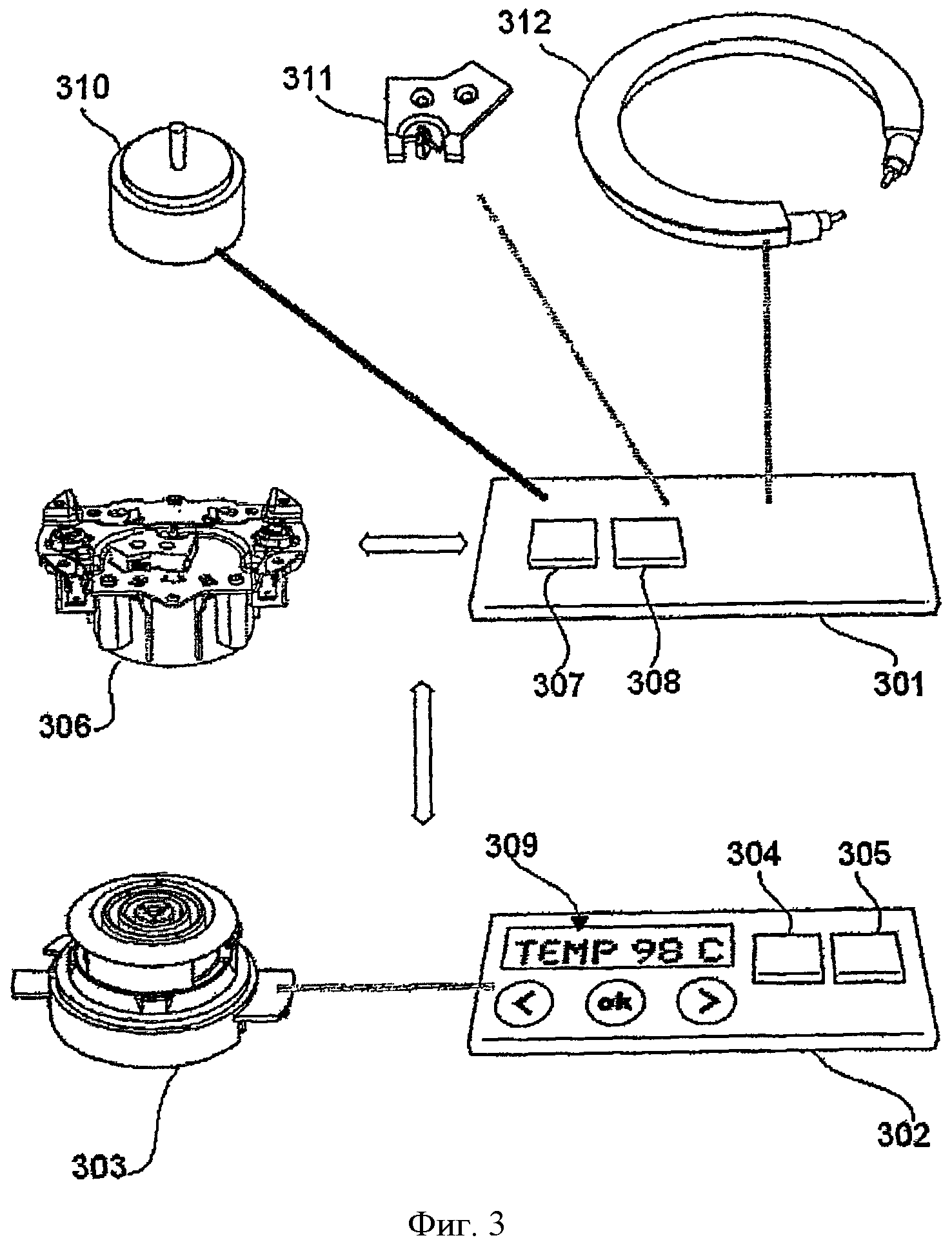
В варианте, описанном ниже, показаны пятиполюсные соединители, хотя можно также использовать и трехполюсные соединители. В варианте, показанном на фиг.3, беспроводная передача данных между первой и второй платами РСВ 301, 302 осуществляется посредством высокочастотных (ВЧ (RF)) радиопередатчиков и радиоприемников. Энергия от нижнего соединителя 303 питает радиопередатчик 304 и радиоприемник 305, установленные на второй плате РСВ 302. Плата РСВ 301 колбы (т.е. верхняя) получает питание через верхний соединитель 306 и аналогичным образом оснащена радиопередатчиком 307 и радиоприемником 308, что делает возможной радиосвязь между двумя платами РСВ. Эти передатчики и приемники могут быть полностью заключены в корпуса и тем самым герметизированы и не видны. Параметры управления вводят с использованием панели 309 управления и индикации. Эти параметры кодируют в виде радиосигналов и передают посредством нижнего радиопередатчика 304. Верхняя плата РСВ 301 принимает эту информацию через верхний радиоприемник 308 и декодирует ее для преобразования в команды для компонентов, например двигателя 310 и нагревательного элемента 312. Верхняя плата РСВ 301 кодирует выходные сигналы термистора 311 в виде сигналов обратной связи и может аналогичным образом передать эти сигналы обратной связи нижней плате РСВ 302 посредством радиосвязи.
В варианте, показанном на фиг.4, беспроводная передача данных возможна с использованием оптических передатчиков и приемников инфракрасного или видимого диапазона. Например, можно использовать светодиоды (LED). В отличие от радиоволн инфракрасные и видимые оптические сигналы могут проходить только через оптически прозрачные материалы. Кроме того, передатчики должны направлять сигналы в сторону приемников. В 360°-чайнике вокруг нижнего соединителя 402 располагается кольцо из нескольких передатчиков 401. Передаваемые сигналы рассеивают с использованием кольцевой рефракционной линзы 403. Такая конструкция оптимизирует равномерное распределение сигнала и помогает обеспечить распределение и прием сигнала независимо от ориентации колбы относительно подставки для подачи питания. В рассматриваемом варианте каждый передатчик спарен с приемником. Эти пары передатчик-приемник распределены, например, равномерно вокруг нижнего соединителя 402. Например, четыре такие пары могут быть распределены через 90° один от другого вокруг соединителя. Аналогичным образом пары передатчик-приемник 405, 407 и рефракционная линза 406 расположены вокруг верхнего соединителя 408.
Параметры управления, введенные пользователем с использованием панели управления 414, нижняя плата РСВ 410 кодирует и преобразует в инфракрасные или видимые оптические сигналы. Нижняя плата РСВ 410 направляет сигналы, подлежащие передаче, нижним передатчикам 401. Такой нижний передатчик 401 передает сигнал верхним приемникам 407. Верхняя плата РСВ 409 декодирует принимаемые сигналы и преобразует их в команды управления компонентами и в том числе двигателем 411 и нагревательным элементом 413. Эта верхняя плата РСВ 409 кодирует выходные сигналы термистора 412 в виде сигналов обратной связи и может аналогичным образом передавать эти сигналы обратной связи нижней плате РСВ 410 посредством оптических видимых или инфракрасных передач.
В варианте, показанном на фиг.5(а), передача данных между платами РСВ осуществляется с использованием электромагнитных (ЕМ) сигналов. Такие электромагнитные передатчики и приемники, которые нужно направлять приблизительно один на другой или совмещать для нормальной работы, можно производить с самыми разными размерами и формами, чтобы эти передатчики и приемники можно было вписать в имеющуюся компоновку. В рассматриваемом примере кольцо или антенна 501 электромагнитного передатчика располагается, например, вокруг нижнего соединителя 502 360°-чайника. Передающее кольцо 501 изготовлено путем намотки проволоки 503 вокруг металлического кольца или сердечника 504. Через эту обмотку 503 пропускают электрический ток для генерации электромагнитного поля. Электромагнитный приемник 505 находится на верхней плате РСВ 506 или, по меньшей мере, имеет связь с этой платой и располагается в электромагнитном поле передающего кольца 501. Аналогично передающее кольцо или антенна 507 электромагнитного передатчика располагается вокруг верхнего соединителя 508, а другой электромагнитный приемник 509 находится в электромагнитном поле этого кольца или антенны и установлен на нижней плате РСВ 510 или имеет связь с ней. Такая конструкция позволяет передавать данные в форме изменяющихся электромагнитных полей путем изменения электрического тока через обмотки передающих колец 501, 507. Нижняя плата РСВ 510 преобразует параметры управления, введенные с панели управления 511, в электромагнитные сигналы. Нижнее передающее кольцо 501 передает эти электромагнитные сигналы в направлении верхнего электромагнитного приемника 505. Верхняя плата РСВ 506 декодирует принятый сигнал и преобразует его в команды управления компонентами, например электродвигателем 512 и нагревательным элементом 514. Верхняя плата РСВ 506 может также кодировать выходные сигналы термистора 513 для преобразования в сигналы обратной связи и аналогично передавать эти сигналы обратной связи электромагнитным способом нижней плате РСВ 510.
Как показано на фиг.5(b), в предпочтительных вариантах каждый приемник должен быть расположен, например, в пределах контура проекции соответствующего передающего кольца, чтобы максимизировать качество сигнала. Таким образом, верхний приемник 515, установленный на верхней плате РСВ 516, располагается в основном в пределах контура проекции нижнего электромагнитного передатчика 518. Аналогично, нижний приемник 519 на нижней плате РСВ 520 располагается в пределах окружности верхнего электромагнитного передающего кольца 522. Хотя и не так существенно, чтобы каждый приемник находился строго в пределах окружности соответствующего передающего кольца, важно, чтобы этот приемник располагался там, где электромагнитное поле, генерируемое этим передающим кольцом, достаточно сильно для приема сигнала.
Как показано на фиг.6, точка кипения воды на большой высоте 601 ниже, чем на уровне моря 602. Вследствие этого, на большой высоте чайник, конфигурированный для определения температуры кипения на уровне моря, будет продолжать кипеть, пока в нем совсем не останется воды, поскольку температура кипения на уровне моря не будет достигнута никогда. Это создает проблемы безопасности из-за риска возгорания и термических травм и ожогов. Таким образом, в некоторых вариантах желательно ввести механизмы управления, позволяющие адаптировать работу чайника к разным высотам.
Температура воды после достижения точки кипения больше не растет. Следовательно, можно определить, была ли достигнута точка кипения, контролируя изменения температуры воды. Факт кипения воды определяют по состоянию, когда температура воды перестает изменяться сколько-нибудь значимым образом.
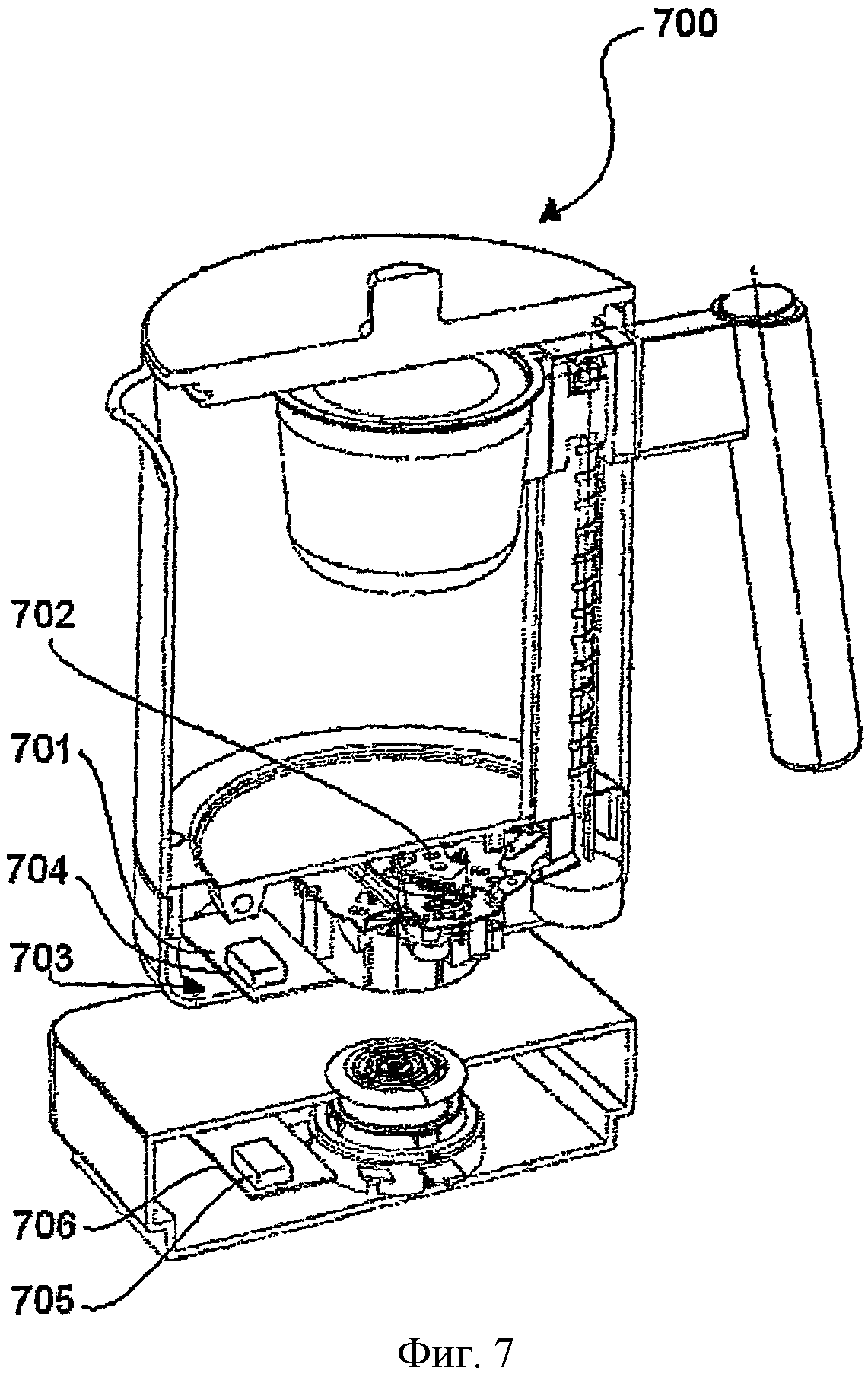
Вариант, показанный на фиг.7, по существу такой же, как и вариант на фиг.1, за исключением того, что вариант фиг.7 может работать на разных высотах. Верхняя плата РСВ 701 принимает входные сигналы от датчика температуры, например термистора 702, расположенного в отсеке 703 управления чайника 700. Плата РСВ 701 имеет программное обеспечение 704, определяющее факт достижения водой точки кипения путем оценки, когда температура воды перестает меняться в течение заданного промежутка времени. Можно представить, что в других вариантах управляющее программное обеспечение 705 может быть инсталлировано на нижней плате РСВ 706. Кроме того, программное обеспечение 704, 705 обеих - верхней и нижней - плат РСВ может быть совместно использовано для сопряжения данных, введенных пользователем, с входными данными от датчика. В различных вариантах этого типа чайник можно использовать для безопасного кипячения воды или других напитков независимо от высоты места над уровнем моря.
Как показано на фиг.8, и соединитель 813 подставки, и соединитель 814 колбы имеют каждый по три силовых провода: нейтральный провод - 821, 824, провод под напряжением - 822, 825 и заземляющий провод - 823, 826. Заземляющие провода 823, 826 создают соединения заземления. Нейтральные провода 821, 824 и провода 822, 825 под напряжением передают электроэнергию нагревательному элементу 815. Выключатель 827 размыкает или замыкает провод 825 под напряжением соединителя 814 колбы. Между колбой 811 и подставкой 812 не требуются другие электрические соединения помимо указанного трехполюсного разъема.
Энергию колбе чайника обычно передают при высоком напряжении (как правило 120 или 240 В) и на низкой частоте (обычно 50 или 60 Гц). Сигналы управления для передачи через такое трехполюсное соединение представляют собой цифровые данные, модулированные в виде низковольтных импульсов с широтно-импульсной модуляцией и высокочастотной несущей. Как будет рассмотрено ниже, высокочастотная несущая позволяет данным пройти через сигнальные фильтры и войти в линии питания.
Передатчик в подставке обрабатывает данные управления для передачи их колбе. Приемник в колбе выделяет и обрабатывает эти данные управления и использует их для управления работой колбы.
Как показано на фиг.9, передатчик 930 содержит усилитель 931 и развязывающее устройство 932. Микропроцессорный контроллер MCU 917 передает цифровой сигнал управления усилителю 931. Этот усилитель 931 усиливает уровень сигнала и помогает установить уровень сигнала для передачи по силовым проводам 922, 923. Усилитель 931 предпочтительно работает на малой мощности и может передать сигнал только на небольшое расстояние, например 40 см, по силовому кабелю переменного тока (АС). В такой схеме очень мала вероятность того, что усиленный сигнал сможет дойти до другого чайника, включенного в ту же самую электрическую сеть.
Усиленный сигнал проходит через развязывающее устройство 932. Это развязывающее устройство 932 представляет собой фильтр верхних частот, обладающий высоким сопротивлением на низкой частоте, например 50 или 60 Гц, и в то же время низким сопротивлением на высокой частоте, например 125 кГц. Полученный развязанный сигнал вводят в силовые провода 922, 923. Эти силовые провода 922, 923 передают сложный сигнал, содержащий напряжение питания и сигнал управления.
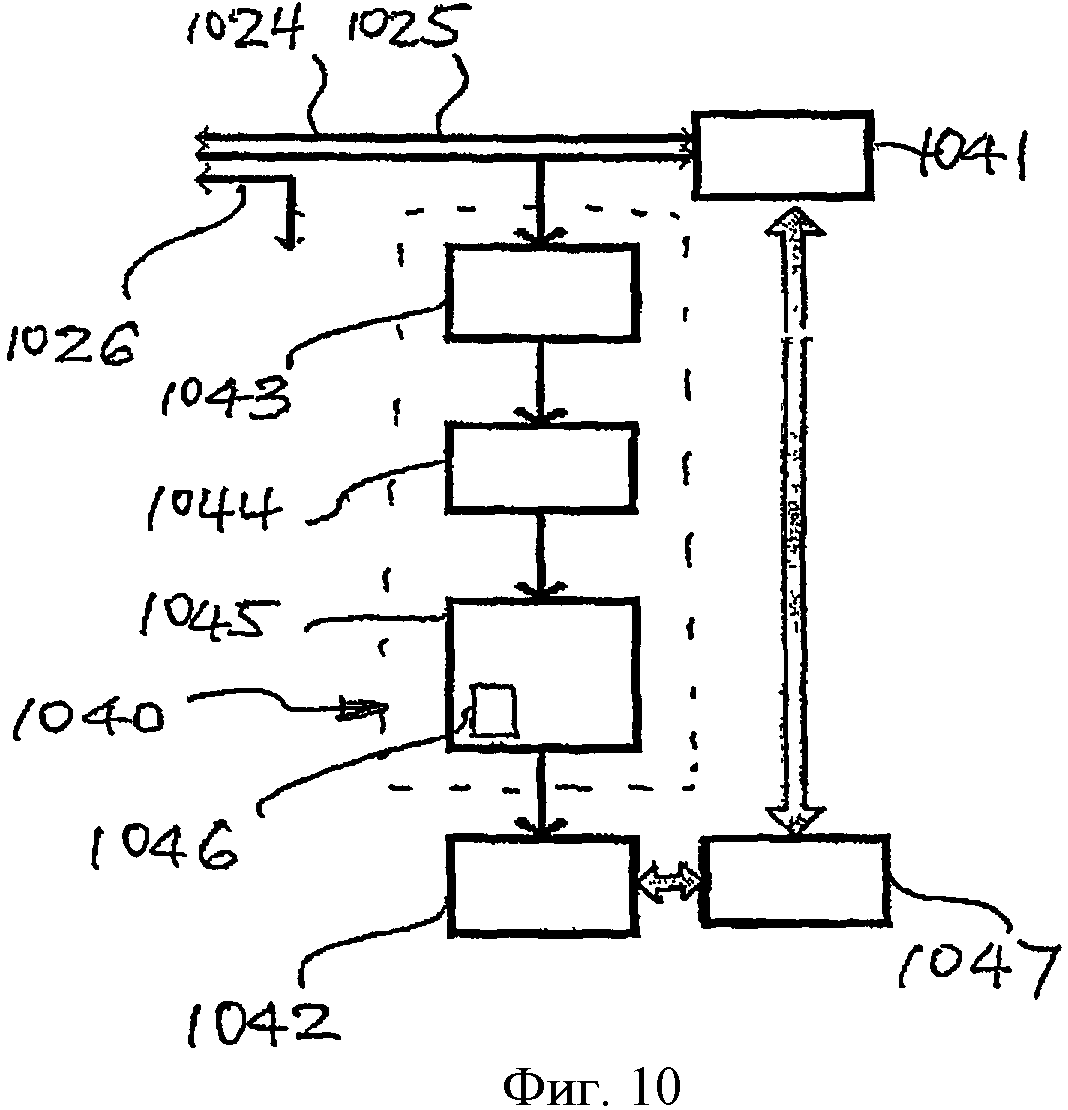
Как показано на фиг.10, силовые провода 1024, 1025 колбы принимают сложный сигнал из силовых проводов 1022, 1023 подставки и передают этот сигнал в нагрузку 1041, например нагревательный элемент, а также приемнику 1040. Этот приемник 1040 передает данные микропроцессорному контроллеру 1042 колбы.
Приемник 1040 содержит развязывающее устройство 1043. Это развязывающее устройство 1043 имеет такую же или аналогичную частотную характеристику, как и развязывающее устройство 1032 в передатчике 1030. После прохождения сложного сигнала через развязывающее устройство 1043 данные управления оказываются отделены от остальной части сложного сигнала. Отделенный в развязывающем устройстве сигнал данных передают микропроцессорному контроллеру MCU 1042 колбы.
Приемник 1040 предпочтительно тоже имеет фильтр верхних частот 1044, дополнительно фильтрующий отделенный сигнал перед направлением его в микропроцессорный контроллер MCU 1042 колбы. Полоса пропускания фильтра верхних частот 1044 немного уже полосы развязывающего устройство 1043 в том смысле, что нижняя частота среза фильтра верхних частот 1044 выше частоты среза развязывающего устройства 1043. Например, полоса пропускания фильтра нижних частот 1044 начинается с частоты приблизительно 38 кГц.
Предпочтительно также, что приемник 1040 имеет настроенный усилитель 1045. Этот настроенный усилитель 1045 усиливает отделенный сигнал, но только на предварительно настроенной частоте или в предварительно настроенном диапазоне частот. В конкретных предпочтительных вариантах отделенный сигнал проходит через фильтр верхних частот 104 и затем через настроенный усилитель 1045. Фильтр верхних частот 1044 и настроенный усилитель 1045 дополнительно выделяют и усиливают данные управления. В некоторых вариантах может быть применен дополнительный усилитель 1091, далее усиливающий выходной сигнал настроенного усилителя 1045 (см. фиг.15). В рассматриваемом примере настроенный усилитель 1045 содержит демодулятор (или детектор огибающей) 1046, демодулирующий отделенный сигнал и преобразующий его в низковольтные цифровые импульсы. В другом варианте демодулятор 1046 может быть выполнен отдельно от настроенного усилителя 1045.
Микропроцессорный контроллер MCU 1042 колбы декодирует демодулированный сигнал и преобразует в различные функции или события управления. Декодированные данные, генерируемые микропроцессорным контроллером MCU 1042 колбы, пересылают в схему 1047 управления нагрузкой 1041. Предпочтительно схема 1047 управления контролирует также работу или состояние схемы 1041 нагрузки и передает данные обратной связи микропроцессорному контроллеру MCU 1042 колбы.
В других предпочтительных вариантах колба и подставка поддерживают двустороннюю связь. Колба 11 содержит также передатчик 930. Микропроцессорный контроллер MCU 1042 колбы кодирует данные, например данные обратной связи, для передачи подставке посредством передатчика 930. Соответственно подставка содержит также приемник 1040. Микропроцессорный контроллер MCU подставки декодирует данные, получаемые приемником. Декодированные данные могут быть преобразованы в информацию, которая может быть представлена на дисплее. Такая информация может представлять собой текущую температуру или текущее рабочее состояние чайника. Эта информация может быть просматриваемой на дисплее, например на жидкокристаллическом дисплее.
Примеры схем и данных
На фиг.11(а) представлена форма низковольтного высокочастотного сигнала несущей, модулированного цифровыми данными. Фиг.11(b) представляет форму демодулированного низковольтного сигнала цифровых данных. Логическая "1" представлена длинным импульсом 1151, а логический "0" представлен коротким импульсом 1152. Как показано на фиг.11(с), каждый импульс 1153 логической «1», импульс 1154 логического «0», импульс 1155 стартового бита и импульс 1156 конечного бита содержит ступеньку 1157 высокого уровня, за которой следует ступенька 1158 низкого уровня. Длительность ступенек 1157, 1158 высокого и низкого уровня представлена в следующей таблице.
Таблица
Фиг.11(d) представляет пример переданного сигнала 1159 и иллюстрирует протокол передачи данных. Стартовый бит 1155 отмечает начало сигнала 1159. За стартовым битом 1155 следует четырехбитовый идентификационный код 1160. За этим идентификационным кодом 1160 следуют биты данных 1161. Для обнаружения ошибок за битами данных 1161 следует четырехбитовая контрольная сумма 1162. Наконец, конечный бит 56 обозначает конец сигнала 1159.
Как показано на фиг.12, развязывающее устройство (932, 1043) может быть реализовано в виде параллельной RC-схемы.
Как показано на фиг.13, усилитель 931 может быть построен на одном транзисторе. В этом примере применен биполярный транзистор 1370. Отделенный сигнал поступает на базу 1371, а усиленный сигнал снимают с коллектора 1372.
Как показано на фиг.14, фильтр 1044 верхних частот в приемнике 1040 представляет собой RC-фильтр верхних частот.
На фиг.15 показана схема предпочтительного варианта приемника 1040.
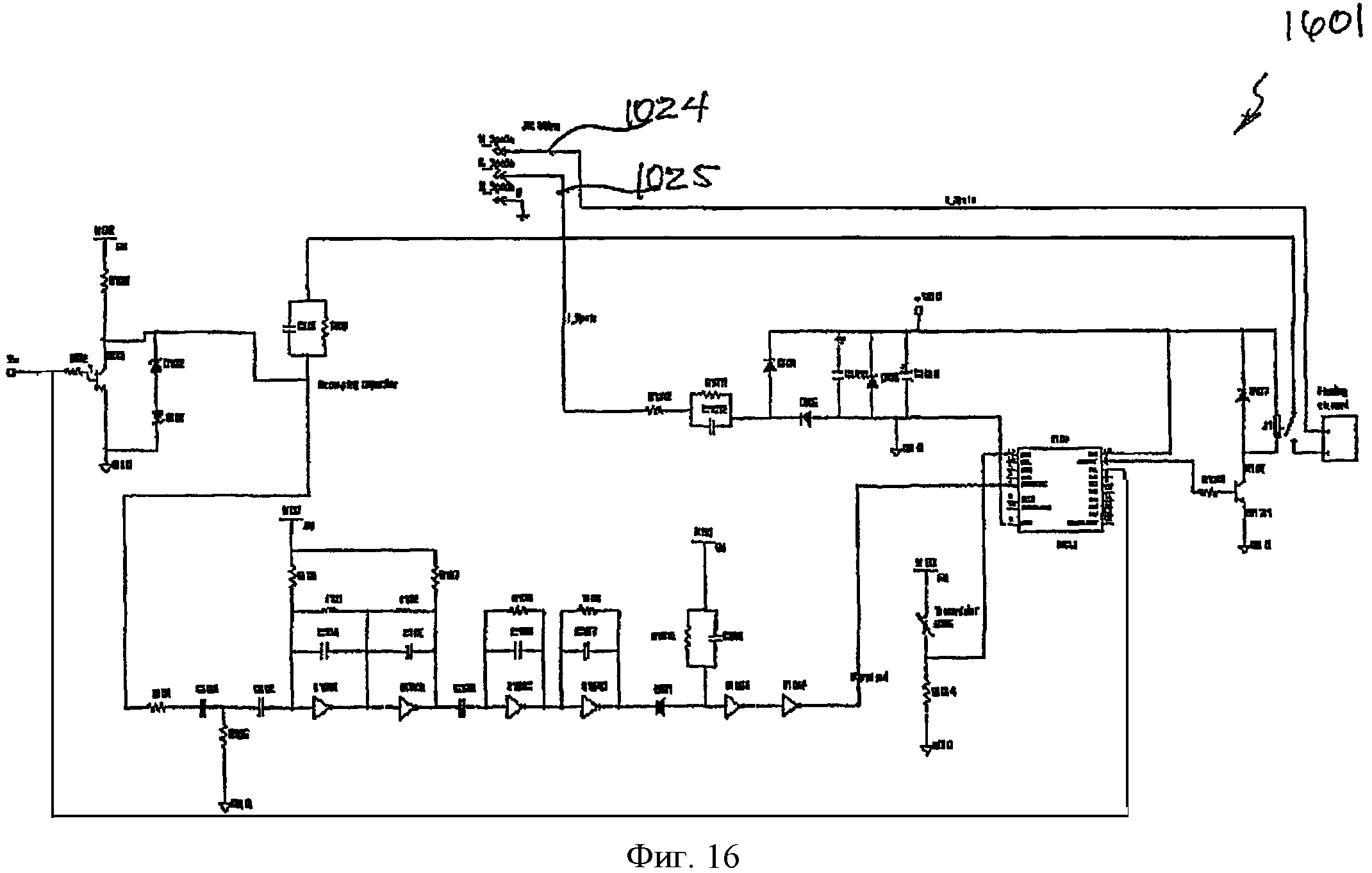
Фиг.16 представляет схему колбы 1601, содержащую приемник 1040, который принимает данные из силовых проводов 1024, 1025 и декодирует эти данные. Колба имеет также передатчик 30, который кодирует данные и передает их подставке по силовым проводам 824, 825.
Фиг.17 представляет схему подставки 1712. Подставка 1712 содержит приемник 1040, который принимает данные из силовых проводов 1721, 1722 и декодирует эти данные. Подставка имеет также передатчик, который кодирует данные и передает их колбе по силовым проводам 1721, 1722.
Процесс программного управления
Фиг.18 представляет пример программного управления или проверки того, что происходит в подставке. Микропроцессорный контроллер MCU сначала проверяет 1821, правильно ли установлена колба. Программа продолжает 1822 проверять, правильно ли установлена колба до тех пор, пока не обнаружит, что колба установлена правильно. Если колба установлена правильно, программное обеспечение микропроцессорного контроллера MCU в подставке генерирует в некоторых вариантах случайный идентификационный код и посылает 1823 его колбе. Этот случайный идентификационный код позволяет колбе и подставке одного и того же чайника распознать одной другую. Колба игнорирует данные от неидентифицированной подставки, и подставка игнорирует данные от неидентифицированной колбы.
Микропроцессорный контроллер MCU подставки затем проверяет 1824, не ввел ли пользователь что-нибудь посредством кнопок интерфейса пользователя. Этот микропроцессорный контроллер MCU преобразует 1825 выбор пользователя, если таковой выбор был сделан, в кодированные цифровые данные. В противном случае микропроцессорный контроллер MCU передает 1826 запросы состояния колбы. Такой выбор пользователя может представлять собой, например, заданную температуру или тип приготавливаемого напитка.
Кодированными цифровыми данными модулируют 1827 высокочастотный сигнал несущей и затем передают 1828 по силовым проводам. Микропроцессорный контроллер MCU предпринимает попытку 1829 обнаружить сигнал-квитанцию о приеме данных от колбы. Эта попытка обнаружения сигнала может продолжаться примерно 50 мс. В случае неудачи 1830 обнаружения квитанции микропроцессорный контроллер MCU снова передает 1828 кодированные данные по силовым проводам. При обнаружении 1831 квитанции микропроцессорный контроллер MCU запрашивает 1826 состояние колбы. Таким параметром текущего состояния может быть, например, текущая температура напитка в колбе или тип напитка, приготавливаемого в колбе в данный момент.
Микропроцессорный контроллер MCU ожидает 1832 приема данных состояния колбы. В случае неудачи 1833 в получении данных состояния микропроцессорный контроллер MCU проверяет, правильно ли колба установлена на подставке. Если колба установлена правильно, микропроцессорный контроллер MCU передает 1826 запрос состояния снова. В противном случае микропроцессорный контроллер MCU продолжает проверять 1821 правильность установки колбы.
После того, как микропроцессорный контроллер MCU подставки получит данные состояния колбы, это состояние будет представлено 1834 на наблюдаемом пользователем дисплее. После этого представления 1834 состояния микропроцессорный контроллер MCU подставки продолжает проверять появление новых выборов или вводов, произведенных 1823 пользователем.
Фиг.19 представляет пример программного управления или проверки того, что происходит в колбе. После инициирования 1901 микропроцессорный контроллер MCU колбы ожидает 1935 прихода данных от подставки. После приема 1936 этих данных микропроцессорный контроллер MCU колбы проверяет 1937 состояние колбы. Если нужно, микропроцессорный контроллер MCU обрабатывает 1938 любые аномальные ситуации, возникающие в колбе. После этого данные состояния колбы передают 1939 подставке.
После того, как микропроцессорный контроллер MCU колбы получит 1936 данные от подставки, он также передает 1940 подставке сигнал-квитанцию или подтверждение приема данных. Затем микропроцессорный контроллер MCU декодирует 1941 эти данные. Далее микропроцессорный контроллер MCU обрабатывает 1942 декодированные данные. На основе обработанных данных микропроцессорный контроллер MCU может отдать 1943 команды выполнения определенных функций. Например, микропроцессорный контроллер MCU может отдать команду измерить текущую температуру напитка.
После обработки 1942 данных микропроцессорный контроллер MCU может также передать 1944 сигнал состояния колбы в ответ на прием 1945 запроса состояния от подставки. Если обработанные данные содержат требование к микропроцессорному контроллеру MCU колбы зарегистрировать идентификационный код 1946 подставки (т.е. обработанные данные включают в себя идентификационный код), этот микропроцессорный контроллер MCU проверяет 1947, есть ли уже на текущий момент какой-нибудь зарегистрированный идентификационный код. Если до настоящего момента никакой идентификационный код зарегистрирован не был, микропроцессорный контроллер MCU регистрирует 1948 идентификационный код подставки.
Фиг.20 представляет блок-схему 2000 альтернативного способа определения момента, когда нужно выключить нагревательные элементы устройства, где происходит кипение для того, чтобы предотвратить ситуацию кипения чайника в отсутствие воды. Как показано на блок-схеме, перед включением нагревательных элементов устанавливают счетчик времени 2001 на нуль, а программное обеспечение имеет записанную в памяти 2002 предварительно определенную первоначальную величину целевой температуры. Теоретически эта величина может быть равна любой температуре ниже точки кипения. В этом примере мы может использовать 0 в качестве первоначальной целевой температуры. В момент начала работы процессор или микропроцессорный контроллер MCU подает команду включить нагревательный элемент и начать считывать в реальном времени показания температуры жидкости в резервуаре. Каждый раз, когда микропроцессорный контроллер MCU считывает в реальном времени температуру жидкости, он сразу же сравнивает 2003 эту реальную температуру с целевой температурой. Эту реально измеренную температуру не нужно записывать в память, поскольку она используется только для сравнения с целевой температурой. Если при сравнении обнаружится, что измеренная в реальном времени температура стала больше целевой температуры, эту целевую температуру увеличивают 2004 на, например, 1 градус и снова устанавливают счетчик времени на нуль. Если измеренная реальная температура не превышает целевую температуру, величину в счетчике увеличивают 2005 на, например, 1 с. В любом случае между моментами сравнения температур введена 2006 задержка, например 1 с. Таким образом, сравнение должно происходить через определенные временные интервалы (например, 1 с), и, если измеренная температура оказалась выше целевой температуры, счетчик времени возвращают на нуль и увеличивают целевую температуру для следующего сравнения. Если счетчик времени достиг заданной величины (например, 5 с), а измеренная температура за это время не может достигнуть новой целевой температуры, микропроцессорный контроллер MCU интерпретирует это событие как то, что достигнута точка кипения, и подает 2008 команду выключить нагревательные элементы. Если измеренная температура может достигнуть новой целевой температуры за указанное время, повторяют 2009 операцию сравнения 2003.
Хотя настоящее изобретение описано со ссылками на конкретные подробности конструкции, следует понимать, что они приведены только в качестве примеров и не накладывают ограничений на объем или сущность настоящего изобретения.
Реферат
Изобретение относится к беспроводным электрическим чайникам и, в частности, к беспроводным электрическим чайникам с передачей данных между чайником и подставкой. Изобретение позволяет передавать данные между корпусом чайника и подставкой для подачи питания беспроводного чайника. Это дает возможность пользователю просматривать данные чайника и управлять функциями или параметрами, например температурой, от подставки для подачи питания беспроводного чайника. 2 н. и 19 з.п. ф-лы, 25 ил., 1 табл.
Формула
беспроводную колбу, имеющую первый электрический соединитель для подачи питания и один или несколько первых элементов передачи данных, подставку, имеющую второй электрический соединитель для подачи питания и один или несколько вторых элементов передачи данных, в котором первый электрический соединитель для подачи питания выполнен с возможностью взаимодействия со вторым электрическим соединителем для подачи питания колбе; первые элементы передачи данных и вторые элементы передачи данных выполнены с возможностью двустороннего обмена данными между собой, и в котором колба включает контроллер, выполненный с возможностью получения данных для управления по меньшей мере одной функцией колбы.
Комментарии