Программно-технический комплекс "радиоконтроллер мкп-23" - RU209625U1
Код документа: RU209625U1
Чертежи
Описание
Полезная модель относится к устройствам автоматизации учёта энергоресурсов и диспетчеризации объектов энергетики, промышленности и ЖКХ, обеспечивающим обработку, хранение, преобразование и обмен информацией с серверами сбора.
Из уровня техники известен контроллер телемеханики, принятый в качестве наиболее близкого решения, содержащий печатную плату, на которой расположены процессорный модуль и параллельно соединенные с ним модуль связи, модуль электропитания, интерфейсный модуль, модуль ввода/вывода сигналов и модуль часов реального времени, при этом модуль электропитания соединен с модулем связи, с интерфейсным модулем и с модулем часов реального времени (см. Патент RU 150636, опубликован 20.02.2015).
Недостатком наиболее близкого решения является отсутствие возможности дублирования беспроводного канала передачи информации GSM, отсутствие возможности бесперебойной передачи данных на большие расстояния в случае потери сигнала связи.
Технической проблемой, решаемой полезной моделью, является создание такого устройства, которое способно осуществлять передачу информации по радиоканалам LPWAN (протокол LoRaWAN) и GSM как одновременно, так и в режиме дублирования.
Техническим результатом полезной модели является расширение функциональных возможностей контроллера телемеханики за счет обеспечения возможности бесперебойной передачи данных о состоянии объектов энергетики, промышленности и ЖКХ по радиоканалу LPWAN (протокол LoRaWAN) на дальние расстояния (до 40 км).
Технический результат полезной модели достигается благодаря тому, что контроллер телемеханики содержит печатную плату, на которой расположены процессорный модуль и параллельно соединенные с ним модуль связи, модуль электропитания, интерфейсный модуль, модуль ввода/вывода сигналов и модуль часов реального времени, модуль электропитания соединен с модулем связи, с интерфейсным модулем и с модулем часов реального времени, при этом на печатной плате расположены модуль передачи и управления с радиомодулем, а также SMA разъемы, параллельно соединенные с радиомодулем через модуль передачи и управления и с модулем связи, а радиомодуль через модуль передачи и управления параллельно соединен с процессорным модулем и с модулем электропитания.
Кроме того, радиомодуль может быть выполнен на базе технологии LPWAN и имеет микроконтроллер с программным обеспечением и приемопередатчик.
Кроме того, контроллер снабжен держателем SD-карт, соединенным с процессорным модулем.
Также контроллер может быть снабжен модулем индикации, параллельно соединенным с процессорным модулем и модулем электропитания.
Кроме того, на печатной плате может быть расположен держатель SIM-карт, соединенный с модулем связи.
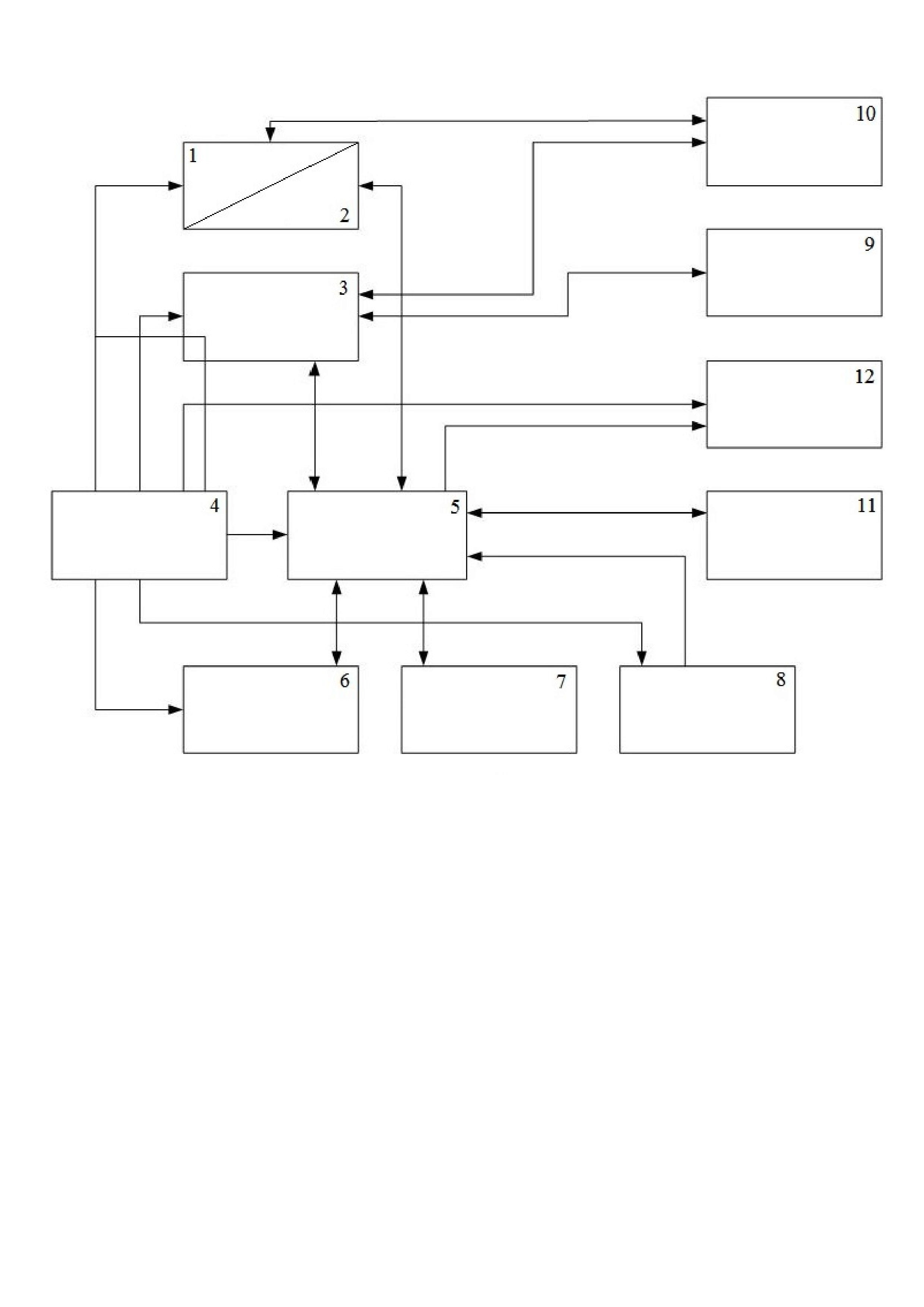
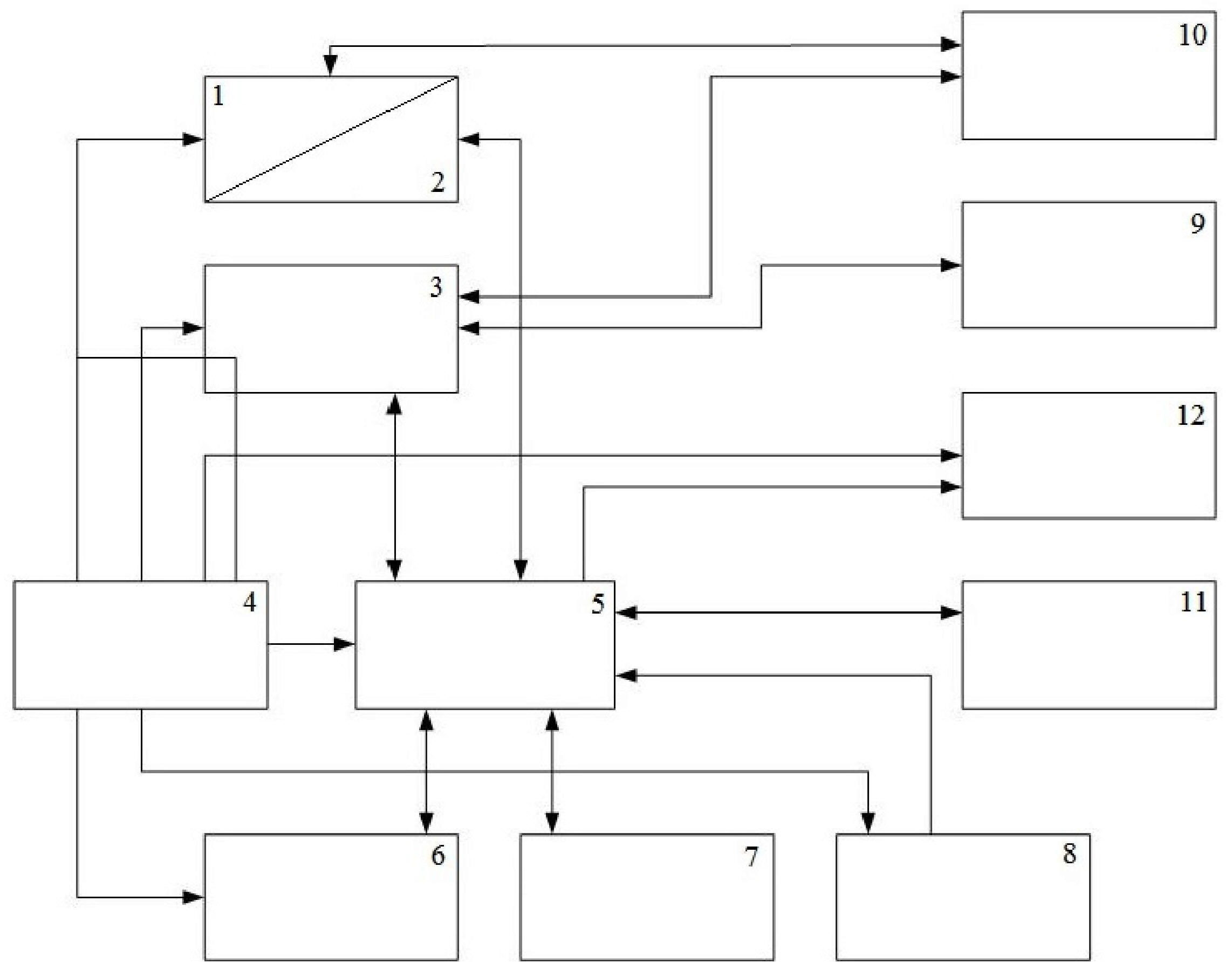
Полезная модель поясняется чертежом, на фигуре которого показана структурная схема компонентов предложенного контроллера телемеханики МКП-23.
Предложенный контроллер телемеханики (имеющий также наименование Программно-технический комплекс «Радиоконтроллер МКП-23», далее по тексту - радиоконтроллер МКП-23) представляет собой малогабаритное программируемое устройство (программно-технический комплекс (ПТК) системы мониторинга и управления качеством электроэнергии уровня подстанции). Предложенный контроллер выполнен в виде единой печатной платы, имеющей вход питания и на которой расположены электронные компоненты, отвечающие за мониторинг электроснабжения, за решение задач автоматизации производственных участков и за контроль доступа на объекты.
На печатной плате предложенного контроллера расположены следующие электронные компоненты: модуль передачи и управления, который включает коннектор 1 и соединенный с ним радиомодуль 2, модуль 3 связи (модуль 3 сети передачи данных (СПД) и координат, далее по тексту - модуль 3 СПД и координат), модуль 4 электропитания, процессорный модуль 5, интерфейсный модуль 6, модуль 7 ввода/вывода сигналов, модуль 8 часов реального времени, держатель 9 SIM-карт, SMA разъемы 10 для внешних антенн. При этом на печатной плате также дополнительно могут быть размещены держатель 11 SD-карт (слот для SD-карт) и модуль 12 индикации.
Все перечисленные компоненты (модули) предложенного контроллера телемеханики смонтированы на единой печатной плате и соединены друг с другом следующим образом.
С процессорным модулем 5 параллельно соединены модуль 4 электропитания, модуль 3 СПД и координат, интерфейсный модуль 6, модуль 7 ввода/вывода сигналов, модуль 8 часов реального времени, держатель 11 SD-карт, модуль 12 индикации, а также модуль передачи и управления (в частности радиомодуль 2 через коннектор 1). При этом указанное соединение обеспечивает двухстороннюю связь процессорного модуля 5 с радиомодулем 2, с модулем 3 СПД и координат, с интерфейсным модулем 6, с модулем 7 ввода/вывода сигналов и с держателем11 SD-карт (т.е. передача сигналов от процессорного модуля 5 на указанные компоненты и обратно от них на процессорный модуль 5). Также такое соединение обеспечивает одностороннюю связь процессорного модуля 5 с модулем 4 электропитания (подача питания от модуля 4 к модулю 5), с модулем 8 часов реального времени (односторонняя передача сигналов от модуля 8 к модулю 5), с модулем 12 индикации (односторонняя передача сигналов от модуля 5 к модулю 12).
С радиомодулем 2 через коннектор 1 (с модулем передачи и управления) помимо процессорного модуля 5 параллельно соединены модуль 4 электропитания и SMA разъем 10 для внешних антенн. Причем разъем 10 имеет двухстороннюю связь с радиомодулем 2, а модуль 4 - одностороннюю связь.
С модулем 3 СПД и координат помимо процессорного модуля 5 также параллельно соединены SMA разъем 10, держатель 9 SIM-карт и модуль 4 электропитания. Причем разъем 10 и держатель 9 имеют двухстороннюю связь с модулем 3, а модуль 4 - одностороннюю связь.
Также модуль 4 электропитания соединен с интерфейсным модулем 6, с модулем 8 часов реального времени и с модулем 12, обеспечивая подачу питания на данные компоненты.
Модуль передачи и управления - главный приемо-передающий модуль предложенного радиоконтроллера МКП-23 (контроллера телемеханики), который имеет в своем составе микроконтроллер и радиомодуль 2 LPWAN. Посредством коннектора 1, расположенного на печатной плате, обеспечивается электрическое соединение радиомодуля 2 LPWAN с соответствующими компонентами, расположенными на печатной плате с целью управления ими и обмена командами. Модуль передачи и управления является основным элементом приёмо-передающего тракта радиоконтроллера МКП-23 (выполняет функции отправки данных о состоянии объектов энергетики, промышленности и ЖКХ, и приёма управляющих команд) и имеет в своем составе микроконтроллер с установленным на нем специальным программным обеспечением, а также приемопередатчик (приемопередающий радиомодуль LPWAN), осуществляющий двухстороннюю связь с базовыми станциями (в том числе с серверами). Радиомодуль 2 работает на базе технологии LPWAN (преимущественно, протокол LoRaWAN), обеспечивающей передачу данных с телеметрическими показаниями на большие расстояния (до 40 км). Радиомодуль 2 LPWAN может быть заменен на другой, использующий радиопередачу на базе других технологий передачи данных ZigBee, UNB и др. Микроконтроллер отвечает за обработку принимаемой и передаваемой информации и выполнение всех логических функций, осуществляет взаимодействие с соответствующими компонентами, расположенными на печатной плате, получает и обрабатывает получаемую от них информацию, осуществляет обработку протокола LoRaWAN, обменивается командами с базовыми станциями и с серверами. Приемопередающий радиомодуль LPWAN (приемопередатчик) обеспечивает работу радиочастотного канала связи.
Использование в составе предложенного контроллера телемеханики совместно с модулем 3 СПД и координат модуля передачи и управления, включающего коннектор 1 и радиомодуль 2, обеспечивает передачу информации по радиоканалам LPWAN и GSM как одновременно, так и в режиме дублирования. В результате, в случае отсутствия или временной пропажи сигнала связи (GSM), предложенный контроллер за счет наличия радиомодуля 2 обеспечит бесперебойную передачу данных о состоянии объектов энергетики, промышленности и ЖКХ по радиоканалу LPWAN (протокол LoRaWAN) на дальние расстояния (до 40 км).
Процессорный модуль 5 (CPU, RAM, ROM, RTC) - главный вычислительный модуль предложенного контроллера телемеханики (радиоконтроллера МКП-23), который имеет в своём составе центральный процессор, оперативную память, постоянную память с установленным на них специальным программным обеспечением. Процессорный модуль 5 отвечает за обработку и обмен данными между модулем передачи и управления с одной стороны, а также между интерфейсным модулем (RS-485, RS-232, FE, USB) и модулем ввода вывода сигналов (GPIO) с другой стороны. Процессорный модуль 5 также обеспечивает обработку и обмен данными, как одновременно между радиомодулем 2 и модулем 3, так и отдельно и независимо друг от друга. В случае потери GSM сигнала при передаче данных, процессорный модуль 5 обменивается сигналами и командами с радиомодулем 2, обеспечивая бесперебойную работу предложенного контроллера, в том числе синхронизируя время работы благодаря модулю 8 часов реального времени.
Интерфейсный модуль 6 (RS-485, RS-232, FE, USB) отвечает за обмен данными между процессорным модулем 5 радиоконтроллера МКП-23 и внешними устройствами, применяемыми для автоматизации учёта энергоресурсов и диспетчеризации объектов энергетики, промышленности и ЖКХ по проводным каналам передачи данных. При этом все полученные данные от внешних устройств могут быть переданы на сервер сбора как по каналам связи GSM с помощью модуля 3, так и по радиоканалу LPWAN с помощью радиомодуля 2, обеспечивая непрерывную и бесперебойную передачу и обмен данными.
Модуль 7 ввода/вывода сигналов (GPIO) отвечает за управление внешними исполнительными устройствами и передачи дискретных сигналов от внешних датчиков на процессорный модуль 5 для обработки с последующей передачей на модуль передачи и управления. При этом в случае потери сигнала связи при использовании модуля 3 СПД и координат, благодаря радиомодулю 2 с коннектором 1 обеспечивается прием и передача сигналов и команд на внешние датчики и от них в любое необходимое время для оперативного реагирования.
Модуль СПД и координат (GSM, LTE, GPS, Wi-Fi) отвечает за обмен данными между процессорным модулем 5 радиоконтроллера МКП-23 и внешними устройствами, применяемыми для автоматизации учёта энергоресурсов и диспетчеризации объектов энергетики, промышленности и ЖКХ по беспроводным каналам передачи данных, а так же определяет географические координаты места расположения радиоконтроллера МКП-23 и принимает сигналы точного времени от спутников.
Модуль электропитания (~220В, =12-24В) отвечает за обеспечение электропитания составных частей радиоконтроллера МКП-23, включая модуль передачи и управления (радиомодуль 2), процессорный модуль 5, интерфейсный модуль 6, модуль 7 ввода/вывода сигналов, модуль 3 СПД и координат.
Модуль 12 индикации отвечает за отображение состояния работы предложенного контроллера телемеханики (радиоконтроллера МКП-23), в том числе при отсутствии сигнала связи модуля 3, отображая работоспособность контроллера по радиоканалу с использованием радиомодуля 2.
SMA разъёмы для внешних антенн отвечают за подключение внешних антенно-фидерных устройств к модулю передачи и управления и модулю 3 СПД и координат.
Держатель SIM-карт предназначен для установки SIM-карт операторов связи с целью организации обмена данными между процессорным модулем 5 радиоконтроллера МКП-23 и внешними устройствами, применяемыми для автоматизации учёта энергоресурсов и диспетчеризации объектов энергетики, промышленности и ЖКХ по беспроводным каналам передачи данных.
Слот для SD-карт предназначен для установки карт флеш-памяти с целью расширения постоянной памяти (ROM) радиоконтроллера МКП-23 в случае необходимости.
Модуль 8 часов реального времени обеспечивает синхронизацию времени работы предложенного контроллера, в том числе в случае потери связи контроллера с сервером через модуль 3, сохраняя связь контроллера с сервером через радиомодуль 2 с отображением реального времени.
Предложенный контроллер телемеханики (радиоконтроллер МКП-23) может иметь корпус, который включает базовый элемент и съемную крышку (не показаны). При этом на базовом элементе закреплен коннектор для крепления контроллера телемеханики на DIN-рейку. При наличии корпуса печатная плата жестко соединена (винтовым соединением) с базовым элементом.
Также для формирования электрической схемы работы контроллера на печатной плате расположены транзисторы, резисторы, диоды, светодиоды, перемычки.
Наличие вышеописанного функционала позволяет реализовать на базе предложенного радиоконтроллера МКП-23 функции автоматизации учёта энергоресурсов, диспетчеризации объектов энергетики, промышленности, ЖКХ и передачи данных о состоянии объектов энергетики, промышленности и ЖКХ по радиоканалам LPWAN (протокол LoRaWAN) и GSM.
Функционал предложенного устройства реализуется следующим образом.
Микроконтроллер модуля передачи и управления (радиомодуля 2) запрограммирован на получение и передачу данных о работе радиоконтроллера МКП-23, а также на управление работой всех компонентов, входящих в радиоконтроллер МКП-23 в соответствии с алгоритмами, заданными программным обеспечением (прошивкой).
Прием и передача данных от радиоконтроллера МКП-23 выполняется с использованием радиоканала с помощью приемопередатчика радиомодуля 2 LPWAN. Прием, передача и обработка информации осуществляются удаленным специализированным мониторинговым программным центром.
Управление радиоконтроллером МКП-23 осуществляется также по радиоканалу связи с использованием LoRaWAN протокола. Прием и обработка информации осуществляются специализированным программным обеспечением микроконтроллера. Программирование предложенного контроллера телемеханики (радиоконтроллера МКП-23) осуществляется через разъем USB.
Удаленное управление радиоконтроллером МКП-23 осуществляется посредством отправки с сервера команд на радиомодуль 2 LPWAN. При получении команды радиомодуль 2 LPWAN передает информацию на микроконтроллер, который отрабатывает данную команду и далее передает сигналы управления на соответствующие компоненты. При необходимости отправить информацию на сервер, микроконтроллер формирует пакет данных и передает его на приемопередатчик радиомодуля 2 LPWAN для отправки.
Таким образом, наличие указанного функционала, позволят реализовать на базе одного радиоконтроллера МКП-23 широкий набор функций, а именно:
безопасный и бесперебойный прием и передачу команд от сервера на радиоконтроллер МКП-23 и обратно с целью автоматизации учёта энергоресурсов, диспетчеризации объектов энергетики, промышленности, ЖКХ и бесперебойной передачи данных о состоянии объектов энергетики, промышленности и ЖКХ по радиоканалу LPWAN (протокол LoRaWAN);
постоянное и бесперебойное получение информации о работе радиоконтроллера МКП-23;
возможность безопасной перезагрузки радиоконтроллера МКП-23 в любое необходимое время, в случае его нестабильной работы с сохранением режима безопасности передачи и приема данных о работе радиоконтроллера МКП-23 последующим его управлением;
возможность осуществления в любое необходимое для пользователя время безопасного программирования режимов и алгоритмов работы радиоконтроллера МКП-23 и т.п.
Реферат
Полезная модель относится к вычислительной технике. Технический результат заключается в расширении функциональных возможностей контроллера телемеханики. Контроллер телемеханики содержит печатную плату, на которой расположены процессорный модуль и параллельно соединенные с ним модуль связи, модуль электропитания, интерфейсный модуль, модуль ввода/вывода сигналов и модуль часов реального времени, при этом модуль электропитания соединен с модулем связи, с интерфейсным модулем и с модулем часов реального времени, отличающийся тем, что на печатной плате расположены модуль передачи и управления с радиомодулем, а также SMA разъемы, параллельно соединенные с радиомодулем через модуль передачи и управления и с модулем связи, при этом радиомодуль через модуль передачи и управления параллельно соединен с процессорным модулем и с модулем электропитания. 4 з.п. ф-лы, 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Система контроля и сбора данных потребления электроэнергии в сетях среднего и низкого напряжения цифрового района электрических сетей
Комментарии