Система, устройство и способ для измерения характеристик тела - RU2703690C2
Код документа: RU2703690C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение касается системы и способа для измерения характеристик тела. Система и способ по настоящему изобретению имеют отношение, в частности, но не исключительно, к выбору матраса в соответствии с характеристиками тела конкретного человека.
УРОВЕНЬ ТЕХНИКИ
При покупке или выборе матраса в настоящее время существует мало информации, чтобы сориентировать пользователя в отношении того, как выбрать матрас, который подойдет конкретно для его характеристик тела. Матрасы представляются в виде общего ряда от среднего качества до высокого качества, при этом не учитываются конкретные физические данные пользователя и не предпринимаются попытки сочетать характеристики матраса с физическими характеристиками пользователя. Это резко контрастирует, например, с процессом выбора обуви, где процесс выбора предполагает учет физических характеристик пользователя, причем при выборе обуви учитывается, в том числе, длина стопы, ширина, высота свода стопы, сама же обувь категоризируется по соответствующим параметрам.
Недавние исследования (Bain 1997 Phd Thesis, University of Surrey,) показали, что между физическими данными пользователя и оптимальными характеристиками матраса существует определенная взаимосвязь. Например, чтобы поддерживать правильное положение позвоночника, лежа на боку (что по общему признанию является желательным, чтобы избежать болей в спине), оптимальная жесткость матраса должна зависеть от ширины, замеряемой от сагиттальной плоскости костных выступов, таких как большой вертел и подвздошная кость, а также распределения массы тела пользователя. Матрас должен оказывать надлежащее сопротивление, чтобы позволить этим костным выступам переместиться в матрас на правильное расстояние, чтобы позвоночник оставался прямым. Необходимая величина сопротивления зависит от упомянутых параметров пользователя.
Общепризнано, что в позе лежа на спине естественная кривизна позвоночника, в том числе кривизна поясницы, грудная кривизна и шейная кривизна, должна поддерживаться для сохранения чувства комфорта. И снова показано, что оптимальные характеристики матраса для поддержания данной кривизны зависят от индивидуальной формы тела пользователя. Например, пользователю с более сильной (меньшего радиуса) кривизной поясницы может понадобиться матрас, обладающий большей дифференциальной податливостью между смежными участками матраса. Это подразумевает связь не только с жесткостью матраса, но также с пространственным разрешением (например, количеством пружин на квадратный метр или профилем плотности пены) опоры, а также механическими свойствами при растяжении верхних слоев набивочного материала. Матрас, который является повсеместно мягким, но имеет весьма грубое распределение пружин или жесткое покрытие парусинового типа, не сможет удовлетворять сильно акцентированной кривизне поясницы.
Ранее был предпринят ряд шагов в попытке предоставления информации в отношении индивидуального пользователя, которая могла бы использоваться для информирования о выборе матраса.
Один из примеров - построение карты давления. В данном способе устройство для построения карты давления, состоящее из двумерной матрицы датчиков давления, используется для отображения двумерной карты распределения давления на кожу пользователя при лежании на матрасе. Номинально можно изменить определенные параметры матраса с целью оптимизации распределения давления. С этим способом связан целый ряд проблем. Одна из проблем заключается в том, что не вполне понятно, что именно составит «хорошее» или «плохое» распределение давления, если говорить о поддержании надлежащего положение тела. Сегодняшнее понимание и интерпретация карт давления сфокусированы главным образом на проблеме образования пролежней у пациентов, пребывающих в больничных условиях, а значит, в большей степени касаются нахождения областей высокого давления, которые могут приводить к плохой перфузии кожи. Стратегия регулировки давления наполнения для минимизации пиковых значений давления может быть эффективна для сохранения здоровья кожи, но мало пригодна для поддержания надлежащего положения тела во сне.
Кроме того, технологии построения карты давления являются дорогостоящими, а во многих предприятиях розничной торговли такие расходы могут быть недопустимы. Помимо этого, требуются значительные научно-технические знания и опыт для технического обслуживания, калибровки и эксплуатации систем построения карты давления так, чтобы получить достоверные результаты. Такой уровень знаний и опыта вряд ли имеется в условиях розничной торговли.
В последнее время (Bain, Hubbard, Woolfson) была разработана система для сбора данных об основной, упрощенной форме тела. Эта форма может затем использоваться вместе с полученными ранее данными, касающимися формы тела, для предпочтений в отношении матраса. Данная система опубликована в описании изобретения к патенту США № US 2011/0009776.
Однако эта система также проявила определенные недостатки. «Захват» трехмерной формы тела не проводился. Информацию о типе тела получали лишь из двумерных контуров на виде спереди и виде сбоку, а значит, она опиралась на некоторые широкие предположения и могла лишь грубо подразделять типы тела на категории.
Кроме того, сбор данных о форме тела в положении стоя некоторыми специалистами в данной области техники рассматривался как непоказательный в отношении формы тела в положении лежа, хотя было также широко признано, что форма, «захваченная» в положении лежа, не отвечает идеальным условиям, поскольку положение тела уже является искаженным.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное изобретение относится к недорогостоящим системе и устройству, не требующим высокой точности при наладке и в работе, для измерения и анализа параметров рельефа тела каждого конкретного пользователя с целью оказания помощи при выборе матраса.
В настоящем изобретении предложена система для использования оптического отображения с целью создания трехмерного отображения характеристик тела; при этом система содержит средство для измерения перемещения, по меньшей мере, одной точки на теле вдоль заданной оси, а также средство для использования данного измерения перемещения, по меньшей мере, одной точки для создания индикатора характеристик тела.
Следует понимать, что ссылки на термины ʺсубъектʺ и ʺхарактеристики телаʺ в настоящем описании следует толковать как относящиеся к человеку или животному и телу человека или животного соответственно. Таким образом, настоящее изобретение применимо как к постели для человека, так и подстилке для животного.
Предпочтительно система содержит устройство, имеющее гибкую поверхность, выполненное с возможностью фиксации величины перемещения гибкой поверхности, когда тело помещено на гибкую поверхность.
В идеале система содержит устройство, имеющее гибкую поверхность, выполненное с возможностью измерения величины перемещения гибкой поверхности, когда упомянутое тело помещено на упомянутую гибкую поверхность, а также средство для создания эффективного давления, прикладываемого к телу, которое меньше давления, создаваемого гравитацией.
Система предпочтительно содержит опорное средство и гибкую поверхность, при этом гибкая поверхность и опорное средство взаимодействуют, чтобы позволить моделировать границу раздела с телом, помещенным на гибкую поверхность или вплотную к ней.
Опорное средство в качестве опции может содержать опорную раму, опорное средство смещения, такое как пружины; или платформу, предпочтительно жесткую платформу.
Система может содержать средство для объединения трехмерной формы и/или информации о распределении давления с существующими данными, относящимися к этим параметрам, для отдачи предпочтения матрасу, чтобы предоставить рекомендации по выбору матраса.
В следующем аспекте в настоящем изобретении предложено устройство для измерения характеристик тела, относящихся, в частности, к выбору матраса, при этом устройство содержит захватный лист, выполненный с возможностью моделирования границы раздела между телом и опорной поверхностью, предпочтительно моделирования при сниженном давлении между телом и опорной поверхностью. Устройство может содержать средство для объединения трехмерной формы и/или информации о распределении давления с существующими данными, относящимися к этим параметрам, для отдачи предпочтения матрасу, чтобы предоставить рекомендации по выбору матраса.
Предпочтительно в данном варианте осуществления граница раздела отличается тем, что измерение формы субъекта проводится в положении лежа на наклонной платформе.
Предпочтительно граница раздела характеризуется распределением двления на границе раздела между субъектом и границей раздела; предпочтительно при этом измерение распределения двления на границе раздела достигается благодаря тому, что листовой материал вынужденно облегает форму субъекта, при этом форма этого материала далее регистрируется.
Предпочтительно регистрационная запись формы материала осуществляется путем фотографирования под наклоном регистрационных точек, помеченных или выступающих на листовом материале.
В качестве альтернативы регистрационная запись формы материала осуществляется путем стереоскопической съемки регистрационных точек, помеченных или выступающих на листе.
Предпочтительно регистрационные точки выступают под одним углом, а фотографируются под другим углом, чтобы предоставить информацию о трехмерном расположении.
Наиболее предпочтительно регистрационные точки на листе перемещаются примерно перпендикулярно плоскости платформы, позволяя аппроксимировать трехмерную форму, используя только одну фотокамеру.
В еще одном аспекте в настоящем изобретении также предложен способ применения оптического отображения с целью создания трехмерного отображения характеристик тела. Таким образом, в настоящем изобретении предложен способ, включающий в себя этап объединения трехмерной формы и/или информации о распределении давления с существующими данными, относящимися к этим параметрам, для отдачи предпочтения матрасу, чтобы предоставить рекомендации по выбору матраса.
Существует технология определения механических свойств матрасов, учитывающая твердость на вдавливание, способность принимать назначенную форму, а также скорость вязкого последействия при изгибе. Предыдущая работа показала, что субъектам с различными типами тела наилучшей опорой служат матрасы, имеющие соответствующие неодинаковые свойства. Например, субъекту, имеющему очень малый вес и острые костные выступы, потребуется очень мягкая поверхность, чтобы костные формы могли удобно располагаться, не прикладывая большой силы, тем самым распределяя давление по большой площади. Большой и тяжелый субъект, однако, «провалится» через такой матрас и будет лежать на твердой поверхности под ним. В качестве еще одного примера тяжелый субъект на матрасе, содержащем малоподвижную вязкую пену, окажется во вмятине, образованной после того как пролежит много минут, так что последующий поворот или изменение положения становится трудновыполнимым. Более легкий и подвижный субъект не испытает таких трудностей и извлечет пользу из повышенных свойств приспосабливаться, предоставляемых вязкой пеной. Дополнительные физические характеристики, такие как ширина плеч, ширина бедер, полнота, определяющая тип фигуры «яблоко» или «груша», естественная кривизна позвоночника в поясничном, грудном и шейном отделах, - все имеют значение для оказания предпочтения типу матраса, что подтверждено эмпирически предпочтениями каждого конкретного потребителя и связано с формами каждого потребителя в отдельности.
Система, устройство и способ по настоящему изобретению работают в каждом из вариантов осуществления, представленных в настоящем описании, будь то при соединении захватного листа с горизонтальной жесткой платформой в целях непосредственного захвата положения лежа, или с вертикальной жесткой платформой для непосредственного захвата положения стоя, или во всех точках между ними для изменения степени принятия положения лежа со 'сниженным эффективным значением силы тяжести'.
В альтернативном варианте осуществления предложена версия системы, устройства и способа по настоящему изобретению пониженной функциональности, где используется матрица для отображения давления вместо «плавающего» полотна. Отображение давления предполагает получение результатов измерения давления на границе раздела между телом и опорной поверхностью, используя систему датчиков или трансдьюсеров, распределенных на поверхности, внутри поверхности или под поверхностью в виде сенсорной карты или как-то иначе. Сам по себе данный вариант осуществления с пониженной функциональностью, не включающий в себя захватный лист, фотокамеру и не обладающий функциональной возможностью предоставления 3D-данных изображения, обеспечит получение улучшенных или ʺболее точныхʺ данных отображения давления, поскольку искажение формы тела, вызванное тем, что тело сопрягается с опорной поверхностью в условиях приложения полного веса, устранено.
В данном альтернативном варианте осуществления система не предоставит 3D-информацию о контурах тела или кривых позвоночника. Однако она создаст карту распределения давления на основании, которое может быть оборудовано тонким стандартизированным матрасом с пористой пеной поверх матрицы отображения давления. Таким образом, хотя данный альтернативный, обладающий пониженной функциональностью вариант осуществления отображения давления по настоящему изобретению не предоставит всю информацию, относящуюся к положению тела, которая возможна при использовании первого варианта осуществления системы, устройства и способа по настоящему изобретению с применением захватного листа 3, соединенного с жесткой платформой 1 (т.е. варианта осуществления с ʺплавающим полотномʺ, имеющего гибкий захватный лист и опорное средство), вариант осуществления отображения давления, обладающий более низкой функциональностью, позволяет собрать информацию, которая может послужить достоверной основой для рекомендации матраса.
Еще один альтернативный вариант осуществления содержит систему и устройство, в которых задействованы как построение карты давления, так и захватный лист с опорным средством/способы 3D-визуализации, чтобы собирать биометрические данные под различными ракурсами.
В дополнительном альтернативном варианте осуществления система может содержать средство для регулировки характеристик нагнетания давления воздушной камеры между гибким листом/захватным листом и платформой-основанием, благодаря чему характеристики нагнетания давления воздушной камеры между захватным листом и платформой-основанием могут регулироваться, например, путем регулировки давления раздувания, исследуя при этом воздействие на положение тела в режиме реального времени. Например, трехмерное представление поясничной, грудной и шейной кривизны может подвергаться непрерывному мониторингу в ходе регулировки давления раздувания (а значит, и жесткости) опоры. Это позволяет каждому в отдельности порекомендовать идеальные характеристики жесткости матраса. Это может выполняться, когда система находится в горизонтальном положении или наклонена с учетом соответствующих поправок.
Дополнительные признаки системы, устройства и способа по настоящему изобретению изложены в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение далее будет описано со ссылкой на сопроводительные чертежи, на которых лишь в качестве примера показан один вариант осуществления системы и устройства по настоящему изобретению.
На чертежах:
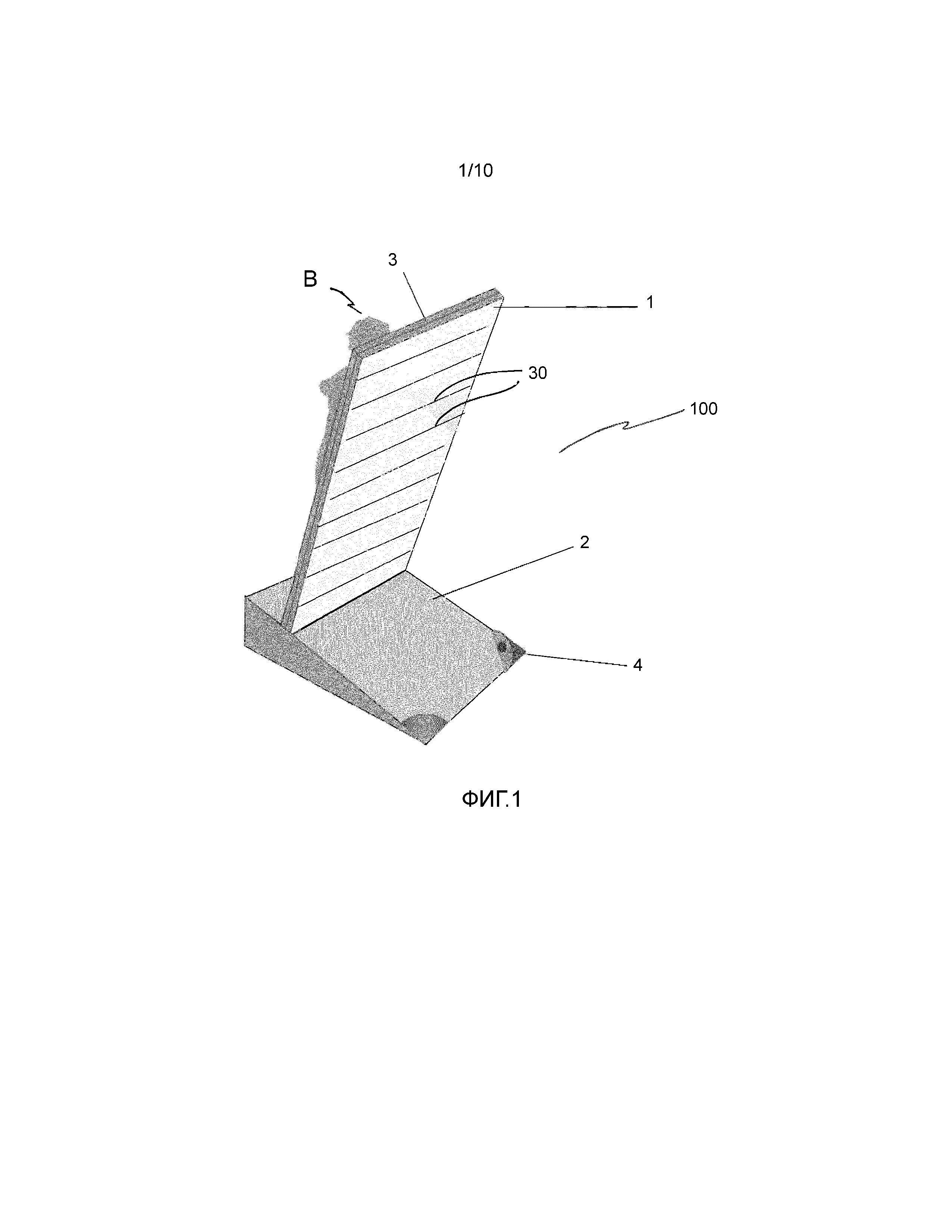
на Фигуре 1 показан вид в перспективе одного варианта осуществления устройства, где показан силуэт субъекта, прислонившегося к опорной платформе устройства, которая в данном варианте осуществления продолжается вверх под углом к горизонтальной плоскости;
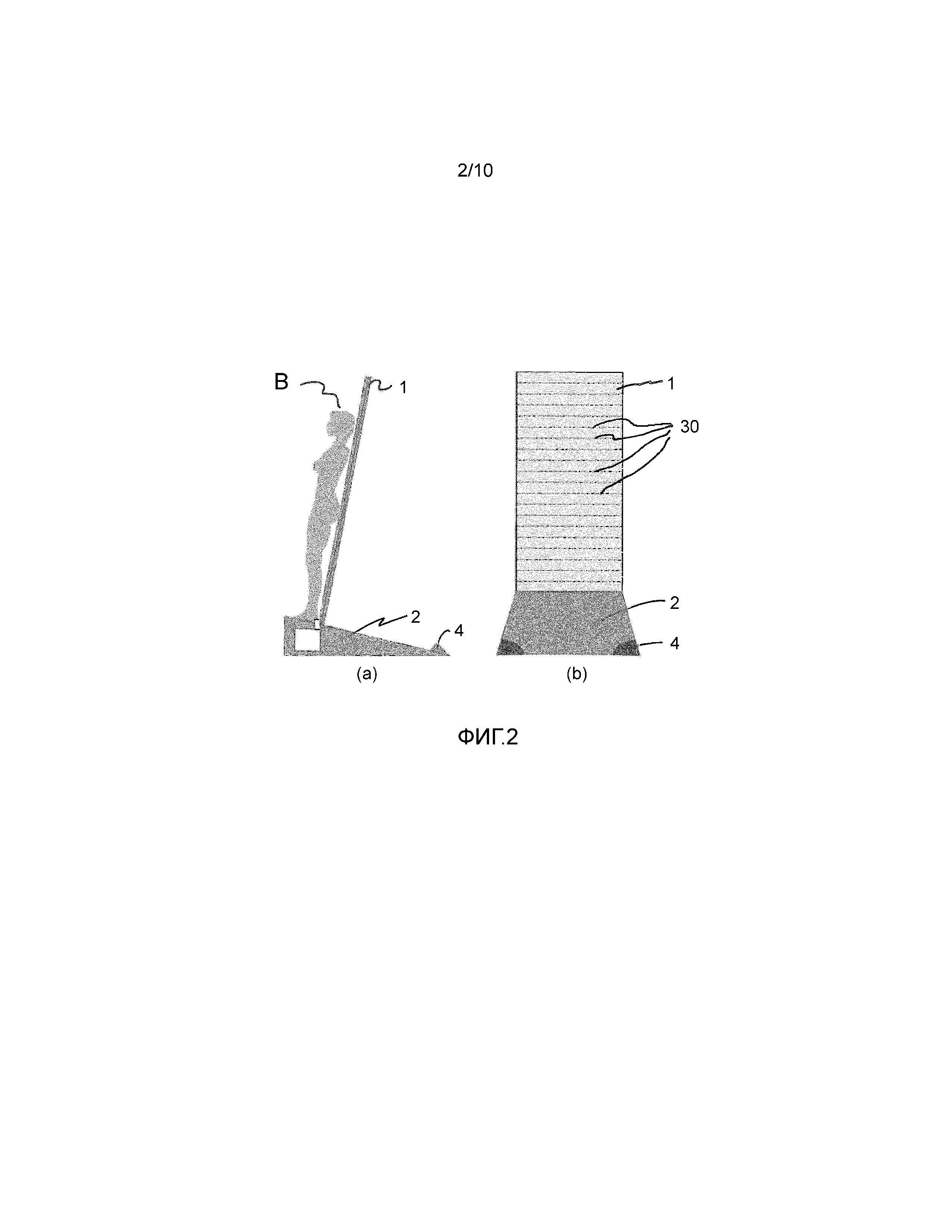
на Фигуре 2a показан вид сбоку устройства, представленного на Фигуре 1, где субъект прислонился к платформе ДО ТОГО, КАК полотно на платформе прижато к силуэту субъекта;
на Фигуре 2b показан вид сзади устройства, представленного на Фигуре 2a;
на Фигуре 3a показан вид сбоку устройства, представленного на Фигуре 2a, где субъект прислонился к платформе ПОСЛЕ ТОГО, КАК полотно на платформе прижато к силуэту субъекта;
на Фигуре 3b показан вид сзади устройства, представленного на Фигуре 3a;
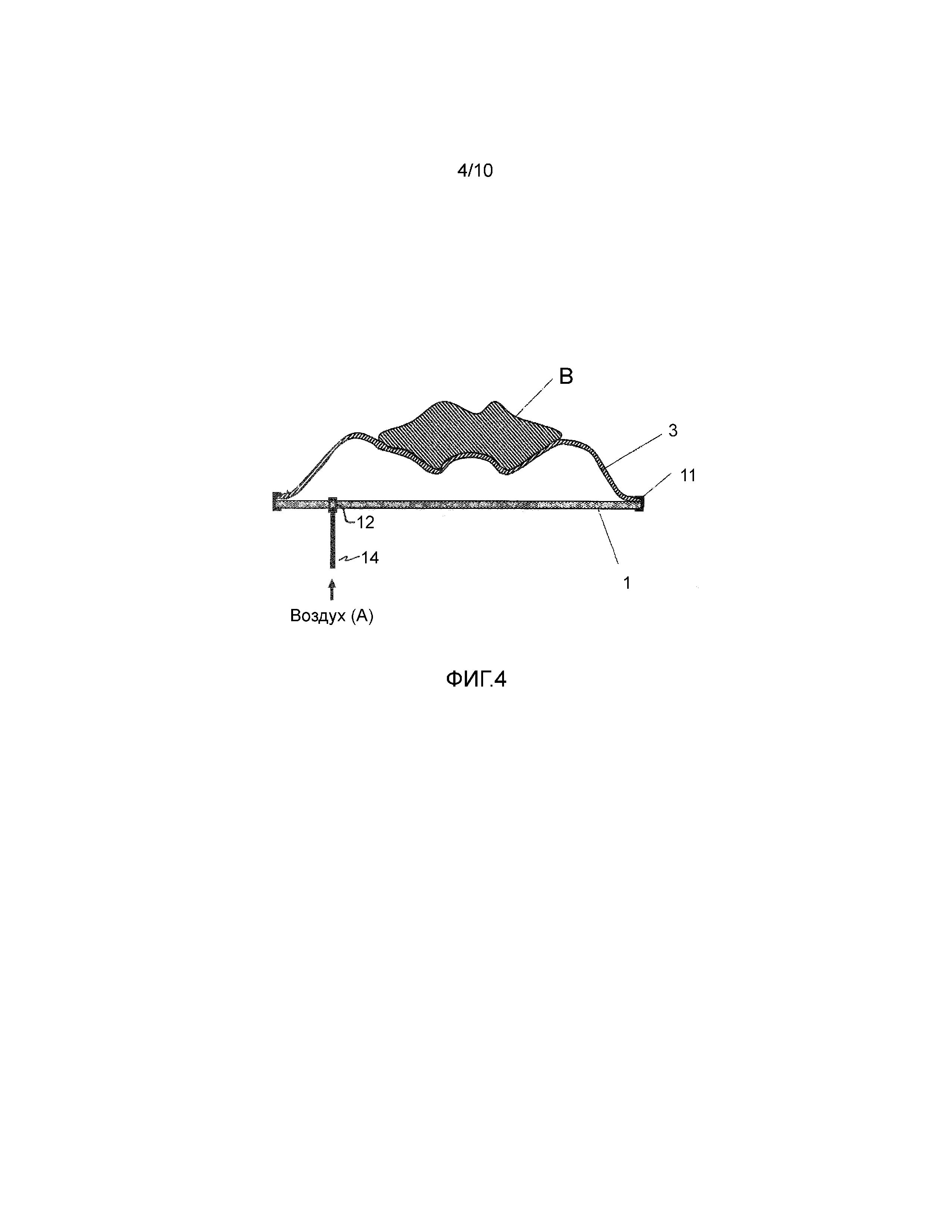
на Фигуре 4 показано сечение устройства по настоящему изобретения на виде сверху; на Фигуре 4 показано жесткое основание/платформа, содержащее обрамляющую раму, удерживающую края гибкого захватного листа, положенного сверху платформы;
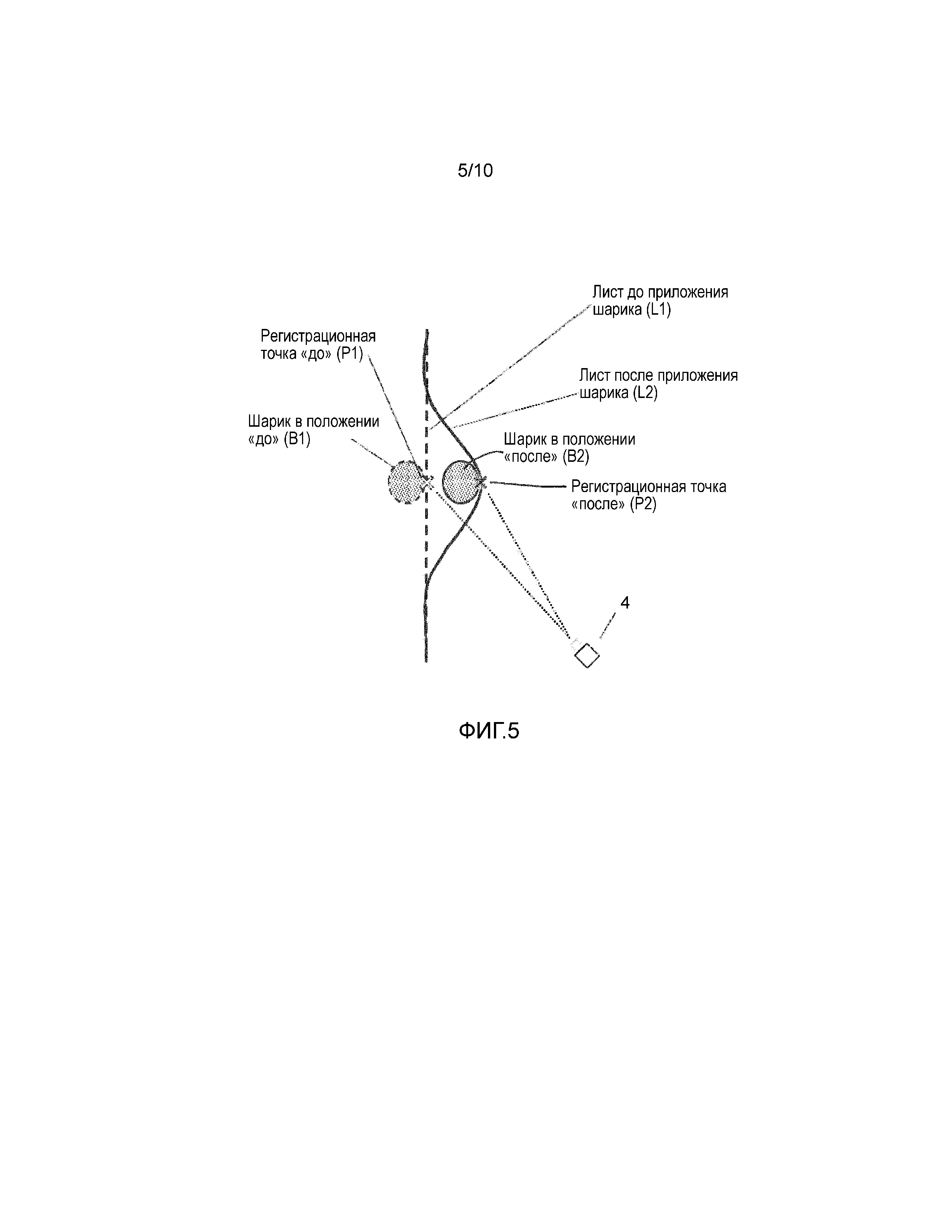
на Фигуре 5 показан вид сбоку захватного листа, занимающего вертикальное положение; пунктирная линия представляет топология листа в недеформированном состоянии, до приложения тела B; в данном случае тело B представлено единственным овальным шариком, который должен вдавливаться в лист; пунктирная линия L1 показывает положение гибкого листа перед приложением тела B, а линия L2 показывает положение гибкого листа после приложения тела B; пунктирная линия B1 показывает положение тела перед приведением в соприкосновение с захватным листом, а пунктирная линия B2 показывает положение тела B после приведения в соприкосновение с захватным листом;
на Фигуре 6 показан вид из фотокамеры в узле, представленном на Фигуре 5;
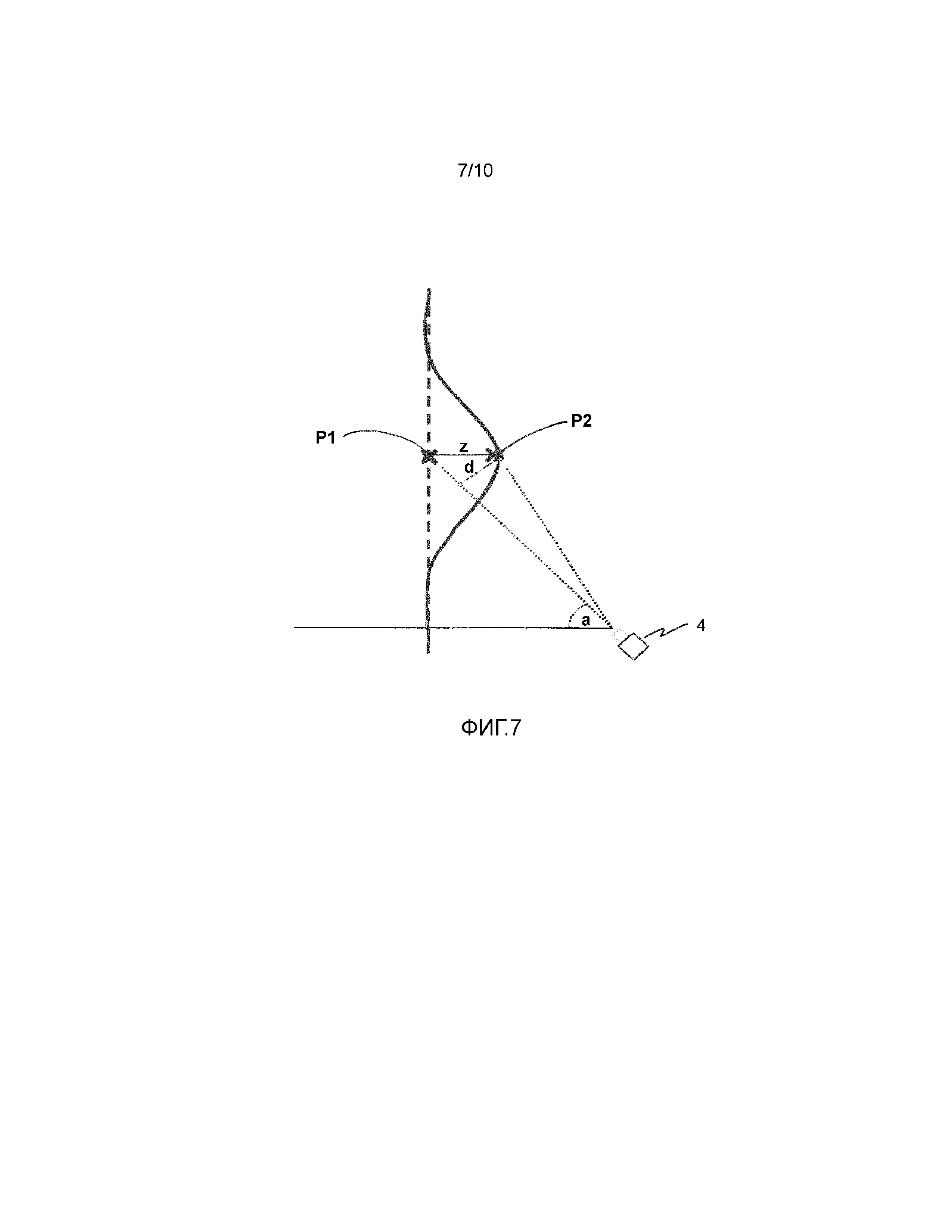
на Фигуре 7 показано смещение регистрационной метки по оси z. Для фотокамеры оно является кажущимся вертикальным перемещением регистрационной метки на расстояние d.
На Фигуре 8 показан вид из фотокамеры в узле, представленном на Фигуре 7; перемещение на расстояние d показано на виде, полученном из фотокамеры, на Фигуре 8.
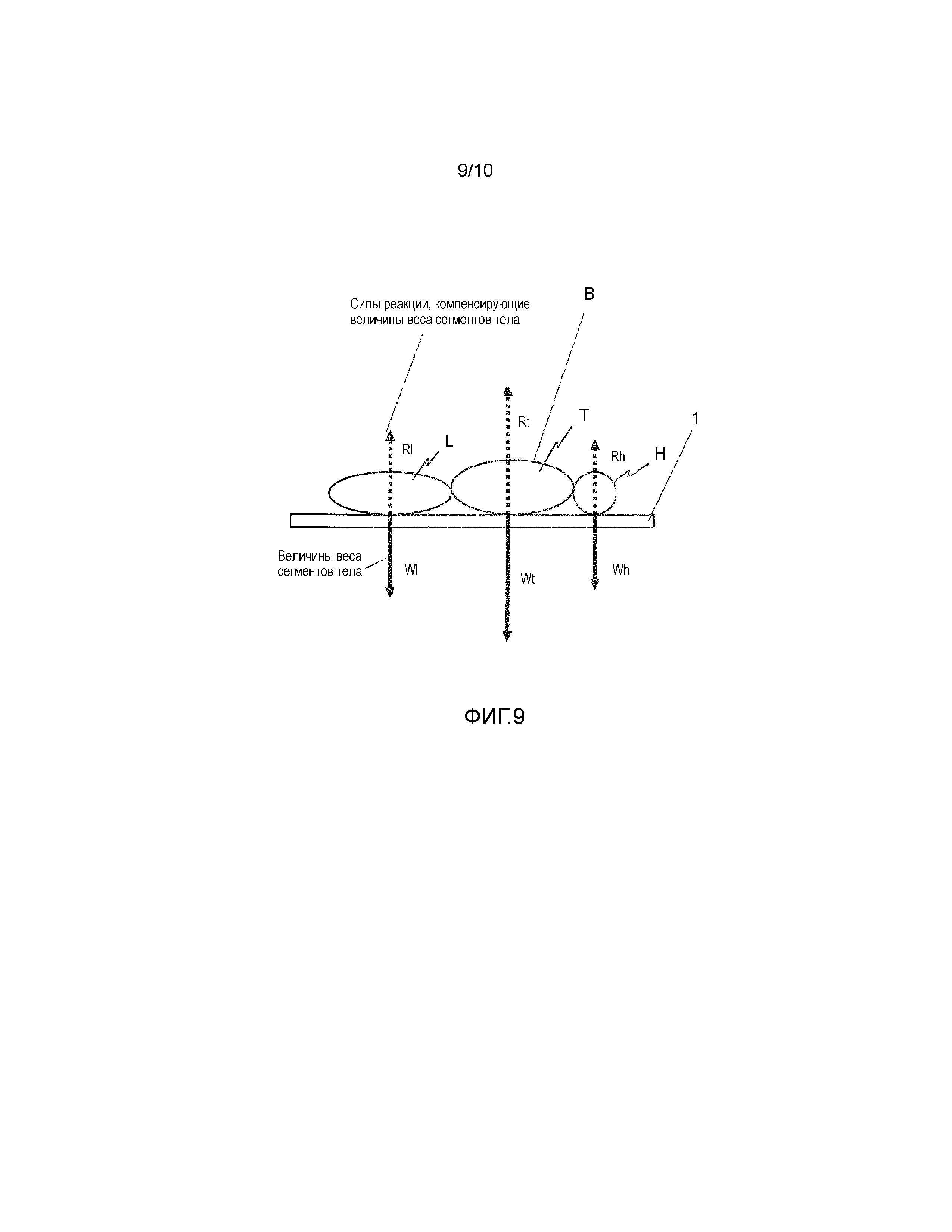
На Фигуре 9 схематично представлено тело, лежащее на жестком платформенном основании;
на Фигуре 10 показано то же схематичное тело, что и на Фигурах, в этот раз опирающееся на жесткую панель, наклоненную на угол B относительно горизонтали.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Обратимся сначала к Фигуре 1, на которой один вариант осуществления устройства по изобретению обозначен в общем ссылочной позицией 100. Устройство 100 содержит захватный лист 3, а также опорное средство для захватного листа, которое в данном варианте осуществления содержит прозрачную платформу 1, выполненную, например, из закаленного стекла. В данном варианте осуществления платформа 1 поддерживается основанием 2, которое наклонено на некоторый угол относительно вертикальной плоскости. Данный угол подбирается так, что субъект располагается под наклоном, опираясь на платформу. Таким образом, угол платформы относительно вертикальной плоскости может составлять, например, 15 градусов, но также может быть меньше или больше этой величины с тем же эффектом. Однако следует понимать, что любой угол наклона платформы, от ее горизонтального положения до вертикального, а также все точки между ними позволят системе, устройству и способу по настоящему изобретению эффективно работать. Нижний край прозрачной платформы 1 оборудован основанием 2, расположенным под прямым углом к платформе 1.
Таким образом, когда покупатель стоит на основании и облокачивается на прозрачную платформу 1, его ноги находятся в естественном положении, при этом силы, действующие между телом B и захватным листом 2, существенно меньше тех сил, которые бы действовали, если бы покупатель лежал на горизонтальной платформе, согласно значению косинуса угла между платформой 1 и горизонтальной плоскостью.
Верхняя поверхность стекла задрапирована захватным листом 3, который может быть выполнен в виде гибкого полотна 3. Захватный лист 3 выбирается из полотен, обладающих драпируемостью, и может представлять собой, например, эластичное трикотажное полотно с лайкрой. На захватный лист 3 наносятся регистрационные метки в виде отпечатанного паттерна (например, паттерна горизонтальных линий 30) на стороне полотна 3, обращенной к прозрачной платформе 1. Захватный лист 3 имеет отпечатанный паттерн 30, такой как паттерн горизонтальных линий 30 (показанный в данном конкретном варианте осуществления), сетка или другой регулярный паттерн. В качестве альтернативы сетка или горизонтальные линии, либо иной паттерн или ориентиры могут проецироваться на заднюю сторону захватного листа 3 с использованием лазера, проектора или других средств.
Другая сторона захватного листа 3 (т.е. сторона захватного листа 3, с которой соприкасается тело B при применении системы и способа) может быть обработана путем нанесения покрытия или с помощью другой обработки, чтобы повысить ее способность к очистке и способствовать увеличению ее срока службы.
Материал, из которого выполнен захватный лист 3, выбирается так, чтобы его свойства позволяли ему функционировать в качестве ʺплавающего полотнаʺ. Этот термин подразумевает, что захватный лист 3 может очерчивать форму тела B, как если бы тело B плавало, т.е. поддерживалось в идеальных условиях с точки зрения распределения давления.
Предпочтительные свойства захватного листа заключаются в том, что он хорошо повторяет форму тела и имеет малый вес, чтобы легко подчиняться воздушному потоку, не приводя к возникновению артефактов. Артефакты могут быть вызваны весом захватного листа 3, приводящему к тому, что захватный лист 3 провисает; либо чрезмерным давлением воздуха или воздушным потоком, который требуется, чтобы набросить захватный лист 3 на тело, что приводит к деформированию мягких тканей тела.
В идеале захватный лист 3 выполнен из материала, способного растягиваться, предпочтительно во всех направлениях, хотя это никоим образом не является обязательным условием. Предпочтительно захватный лист 3 образован поддающимся растягиванию полотном, которое является относительно тонким. Предпочтительно также, чтобы захватный лист имел покрытие, позволяющее ему быть менее проницаемым для воздуха, чем гибкий лист, изготовленный из материала, не имеющего покрытия, что способствует обеспечению «задувания» захватного листа 3 на тело B/вплотную к нему, а также облегчению печатания соответствующих регистрационных меток (например, паттерна 30 горизонтальных линий) на задней стороне захватного листа 3.
Захватный лист 3 может удерживаться на стекле крепежным средством, таким как зажим. Крепежное средство может быть выполнено в виде обрамляющей рамы 11, прижимающей края захватного листа 3 к прозрачной платформе 1. В качестве альтернативы крепежное средство может содержать любое другое фиксирующее средство для крепления захватного листа 3 к прозрачной платформе 1.
Предусмотрено средство, чтобы заставить захватный лист 3 прижаться к телу B, в частности телу субъекта, например, высокопроизводительный нагнетатель воздуха (не показан), такой как нагнетатель воздуха, применяемый для раздувания рекламным надувных изделий, надувных батутов или кемпинговых матрасов, который используется для наддува полотна, прижимая его к спине субъекта и распространяя его по всей длине субъекта, тем самым заставляя его «задрапировать» субъекта, подвергаемого измерениям.
Датчик давления воздуха (не показан) также может быть предусмотрен для измерения давления воздуха.
По меньшей мере, в одном заднем углу платформы расположена, по меньшей мере, одна фотокамера 4, выполненная с возможностью захвата регистрационных меток, отпечатанных на задней стороне захватного листа 3; если говорить конкретнее, по меньшей мере, одна фотокамера 4 выполнена с возможностью захвата искажений в паттерне регистрационных меток, вызванных телом B, приходящим в соприкосновение с захватным листом 3.
Первоначально, как показано на Фигуре 2b, невооруженным глазом виден ненарушенный паттерн захватного листа 3, который детектируется фотокамерой 4.
Когда нагнетатель воздуха приводится в действие и работает на подачу воздуха в пространство между листом и жесткой платформой, задняя сторона полотна подвергается давлению и поджимается к спине субъекта, прислонившегося к платформе 1; захватный лист 3 облегает заднюю сторону тела B, например субъекта, который является покупателем, желающим приобрести изготовленный по заказу матрас, который будет выполнен именно так, чтобы удовлетворять физическим данным субъекта, как показано на Фигуре 3.
Когда захватный лист 3 облегает тело B, нарушения в паттерне 30 регистрационных меток определяют форму тела в трехмерном пространстве (3D). Эти нарушения можно визуализировать либо стереоскопически, используя две фотокамеры, либо проще вывести с незначительной потерей точности с помощью одной камеры, регистрирующей перемещение референсных точек на сетке из исходной плоскости, используя простые тригонометрические построения на основе теоремы Пифагора, предполагая, что каждая точка перемещается практически ортогонально из исходного положения. Это регистрируется фотокамерами 4 и количественно выражается с использованием алгоритмов обработки изображения, чтобы выполнить аппроксимацию трехмерной формы тела, в частности задней части тела B.
После доброго десятка лет исследований (Bain и др.; см. раздел справочной литературы в настоящем патентном описании) установлены известные соотношения между морфологией тела и характеристиками матраса. См., например, следующую литературу: Bain D, Laboratory performance of alternating pressure air mattresses component and sequelae. Br J Nurs. 2011 Nov 10-23;20(20):стр.29-34.
Bain D, Ferguson-Pell M, McLeod A Evaluation of mattresses using interface pressure mapping. J Wound Care. 2003 Jun;12(6):231-5.
Bain D, Scales JT, Nicholson GP A new method of assessing the mechanical properties of patient support systems (PSS) using a phantom. A preliminary communication. Med Eng Phys. 1999 Jun;21(5):293-301.
Bain D, Testing the effectiveness of patient support systems: the importance of indentor geometry. J Tissue Viability. 1998 Jan;8(1):15-7.
Jacobson BH1, Gemmell HA, Hayes BM, Altena TS.
Effectiveness of a selected bedding system on quality of sleep, low back pain, shoulder pain, and spine stiffness. J Manipulative Physiol Ther. 2002 Feb;25(2):88-92.
Измерение морфологических характеристик тела при ʺпониженной гравитацииʺ, т.е. в положении наклона под углом 10-15 градусов, обеспечиваемое устройством и системой по настоящему изобретению, позволяет собрать данные о реальном положении лежа, при этом, однако, кривизна позвоночника и топология мягких тканей не искажены давлением, испытываемым под действием полного веса. Устройство, система и способ по настоящему изобретению «захватывают» реальное положение лежа при ʺпониженной гравитацииʺ, что, в свою очередь, позволяет максимально сохранять оптимальную форму в лежачем положении матрасом, который будет изготовлен с учетом конкретных требований в отношении тела отдельного субъекта, когда тело находится в горизонтальном положении.
На Фигуре 4 сопроводительных чертежей дополнительно описывается узел устройства и системы по настоящему изобретению. Жесткая платформа 1, функционирующая в качестве основания (что в настоящем описании является синонимом терминов ʺплатформа-основаниеʺ или ʺплатформаʺ), содержит обрамляющую раму 11, выполняющую функцию зажима, для присоединения захватного листа 3 к платформе 1 и удерживает края захватного листа 3, лежащего поверх жесткой платформы-основания 1.
Порт 12 в перегородке на платформе 1, оборудованный воздуховпускной трубкой 14, как показано на Фиг. 4, - пример того, как может доставляться воздух между захватным листом 3 и жесткой платформой-основанием 1, чтобы покрыть захватным листом тело B, нагнетая воздух через порт 12, тем самым поджимая гибкий тонкий захватный лист 3 в направлении тела B и вокруг него. Соответствующий насос или нагнетатель воздуха (не показан) может находиться где угодно, в том числе в одном варианте осуществления удаленно от устройства и системы, при этом воздух от нагнетателя может доставляться в порт 12 в перегородке либо напрямую, либо через трубку 14.
Лист может быть выполнен из упругого материала, чтобы способствовать «драпировке», а также лист может иметь покрытие из уплотнительного материала, такого как полиуретан, чтобы способствовать раздуванию. Данное покрытие не является обязательным, поскольку утечка воздуха не представляет собой проблему, если нагнетатель воздуха для раздувания листа имеет достаточную производительность, чтобы обеспечивать подачу воздуха в пространство между листом и жесткой платформой-основанием так, чтобы преодолеть любую утечку или просачивание сквозь лист.
На Фигуре 4 показано сечение тела субъекта, наложенное на раздутый лист и вызывающее деформирование листа. Таким образом, форма листа повторяет трехмерную форму тела субъекта.
Тело субъекта с тем же успехом может прикладываться к листу до нагнетания воздуха, и в этом случае форма тела будет препятствовать раздуванию листа, но, тем не менее, лист примет ту же конечную форму, при этом лист опять же примет форму тела субъекта. Не обязательно, чтобы давление нагнетания воздуха было столь высоким, чтобы приподнять тело субъекта с платформы-основания, хотя это показано на Фиг. 5 и 6.
Описание оптического способа захвата 3D формы.
Обратимся теперь конкретно к Фигурам 5 и 6, при этом на Фигуре 5 захватный лист 3 показан в вертикальном положении, если смотреть со стороны. На Фигуре 6 показан вид из фотокамеры 4, зарегистрированный, когда тело B, в данном случае шарик, приведено в соприкосновение с захватным листом 3. Шарик перемещается из первого положения (B1) тела, которое он занимает непосредственно в момент контакта с захватным листом 3. Пунктирная линия (L1) показывает начальное положение захватного листа 3, т.е. недеформированную топологию захватного листа 3, до того как приложено тело (шарик) B. В данном случае тело, будь то одушевленное (человек или животное) тело или неодушевленное тело, представлено единственным овальным шариком, который должен вдавливаться в лист. Линия L2 показывает конечное положение захватного листа 3, после того как на него наложено тело (шарик), при этом соответствующее положение тела обозначено шариком в положении B2.
На лист нанесена регистрационная метка, в данном случае регистрационная точка P, причем в данном примере регистрационная метка представлена в виде креста в единственной точке на листе. До приложения шарика данная точка на поверхности листа находится в положении P1 (ʺРегистрационная точка «до»ʺ). После приложения шарика B регистрационная точка P перемещается в положение P2 (ʺРегистрационная точка «после»ʺ).
Фотокамера расположена со смещением от направления движения точки P, которое будем называть z осью, перпендикулярного опорной плоскости листа. В данном варианте осуществления, как показано на Фиг. 5, фотокамера расположена со смещением ниже z оси, а именно на уровне пола, и смотрит вверх.
На Фигуре 6 показан вид из фотокамеры. Первоначально фотокамера видит регистрационную точку в положении P1. Рассматривая 3D положение точки в декартовой системе координат (x,y,z), где значение x представляет известное горизонтальное положение точки P на этом виде, а значение y представляет известное вертикальное положение точки P на этом виде, z будет представлять отклонение точки P в третьем измерении, а именно по z оси. Можно предположить в рамках разумных ограничений по точности, что точка P будет перемещаться главным образом в z направлении, при этом перемещение в x направлении или y направлении весьма мало.
Когда шарик прикладывается к захватному листу, захватный лист принимает новую форму, представленную линией L2, при этом регистрационная точка перемещается в положение P2. Это регистрируется фотокамерой на Фигуре 6 в виде перемещения регистрационной точки вверх из положения P1 в положение P2.
На Фиг. 7 смещение регистрационной метки по z оси представлено величиной z. Для фотокамеры оно является кажущимся вертикальным перемещением регистрационной метки на расстояние d. Данное перемещение на расстояние d показано в поле зрения фотокамеры, как можно видеть на Фигуре 8.
Зная положение точки P, при известном ориентационном положении фотокамеры можно определить угол (a) наклона фотокамеры. Простое тригонометрическое соотношение позволяет рассчитать величину z на основе величины d следующим образом:
Z= d/sin(a)
Таким образом, теперь мы знаем величину z в декартовой системе координат для точки P, при этом величины x и y уже известны.
Таким образом, имея множество распознаваемых регистрационных точек в известных положениях, можно построить трехмерную карту поверхности листа, претерпевшего изгиб. Таким образом, когда лист повторяет форму тела, форму тела можно реконструировать в трехмерном пространстве.
Регистрационные точки на листе могут принимать форму массива меток при известной геометрии, например в виде сетки.
Для каждой точки известна величина y (вертикальное положение на листе), что позволяет рассчитать для поля зрения фотокамеры угол a обзора, а значит, и надлежащий масштабный множитель 1/sin(a), чтобы получить величину z.
В одном варианте осуществления захватный лист может быть размечен горизонтальными линиями 30. В данном варианте осуществления способа можно предположить, что крайние точки горизонтальных линий не отклоняются, будучи захваченными рамой. Следовательно, величина d для каждой точки на линии может определяться ее отклонением от прямой, соединяющей крайние точки.
Альтернативно в другом варианте осуществления в качестве регистрационных меток могут использоваться вертикальные линии или сетчатый паттерн.
В качестве альтернативы вместо маркировочной сетки или линий непосредственно на листе они могут проецироваться лазером, диаскопическим проектором или другими средствам. Если положение проектора известно, простые тригонометрические соотношения снова позволят найти величину z в декартовой системе координат в любой точке поверхности.
Существует множество средств программного обеспечения для идентификации референсных точек в автоматическом режиме и вычисления их положения. Обычно это принимает форму распознавания переходов яркости на краях полос, квадратов или других соответствующих геометрических элементов.
Пояснение 'эффективного снижения гравитации'
На Фигуре 9 схематично представлено тело B, содержащее номинальную форму тела, имеющую голову H, туловище T и ноги L, лежащее на горизонтальной жесткой платформе-основании 1. На Фигуре 9 упрощенно представлены участки головы, туловища и ног, соединенные гибкими сочленениями. Каждый сегмент тела имеет свой собственный соответствующий вес вследствие гравитации, представленный на Фигуре 9 следующими величинами веса сегментов тела: вес ног Wl, вес туловища Wt и вес головы Wh.
На горизонтальной платформе 1 соблюдение статического равновесия требует, чтобы силы реакции, связанные с разными частями тела, были равны соответствующему весу и действовали в противоположном направлении. Таким образом, силы реакции, компенсирующие соответствующие величины веса сегментов тела, являются следующими: Реакция ног, RL=Wl; Реакция туловища, Rt=Wt; а также Реакция головы, Rh=Wh. Карта давления на границе раздела выявит величины веса в этих пропорциях, связанных с каждым сегментом тела.
На Фигуре 10 показано то же схематичное тело, что и на Фиг. 9, однако теперь опертое на жесткую платформу 1, наклоненную на угол B относительно горизонтали.
Каждый сегмент тела, а именно голова туловище и ноги, по-прежнему имеет тот же вес в силу гравитации, т.е. соответственно Wl, Wt и Wh. В данном варианте осуществления, однако, если принять, что между панелью и телом имеет место контакт без трения, реакция панели может быть направлена только перпендикулярно панели. Для каждого сегмента тела, таким образом, вес можно разложить на «перпендикулярную» компоненту W(P), направленную перпендикулярно панели, и «тангенциальную» компоненту W(T), направленную по касательной к панели. Сила реакции, порождаемая жесткой платформой, соответствует перпендикулярной компоненте, в то время как тангенциальная компонента полностью приходится на опору для ног на нижнем конце панели, как Rtot(T).
Например, рассмотрим участок туловища: Вес Wt представляет собой сумму компонент Wt(P) и Wt(T), направленных соответственно перпендикулярно и по касательной к панели.
Датчик силы на границе раздела между туловищем и панелью, таким образом, зарегистрирует величину Rt как равную Wt(P), в то время как Wt(T) передается на опору для ног.
Новое значение Rt можно рассчитать как Wl x cos(B), где B - угол наклона панели относительно горизонтали.
Важно отметить, что поскольку все части тела находятся на одной и той же жесткой платформе с наклоном на один и тот же угол, они все испытывают одинаковое уменьшение перпендикулярной силы реакции, определяемое умножением на коэффициент cos(B). Следовательно, хотя силы реакции снижены, они сохраняют те же пропорции, что и на исходной горизонтальной панели.
Практически распределение давления в условиях 'сниженного эффективного значения силы тяжести' можно наблюдать и измерять, используя систему, устройство и способ по настоящему изобретению.
Зная угол B, можно измерить распределение сил или величин давления на наклонной жесткой платформе, а значит, рассчитать распределение давления на теле, как если бы оно находилось на горизонтальной поверхности.
Данный вариант осуществления, в котором захватный лист 3 лежит на наклонной жесткой платформе 1, является предпочтительным по следующим причинам.
1. В некоторых ситуациях (например, в магазине) может оказаться неуместным или неудобным попросить кого-либо лечь на горизонтальную панель. Горизонтальная панель занимает много места на полу, при этом покупатели иногда не расположены это делать. Наклонная платформа занимает меньшую площадь пола и может предоставить ту же информацию.
2. В условиях лежа горизонтально под действием полного веса искажается положение скелета, а также деформируются мягкие ткани. Получение информации (о форме или распределении давления) от покупателя таким способом заключается в регистрации информации в неидеальных условиях. Наклонная плоскость позволяет найти компромиссное решение, при котором воспроизводится реальное положение лежа, но при отсутствии искажающих эффектов, вызванных действием полной силы тяжести.
Система, устройство и способ оптического захвата по настоящему изобретению работают в любом из вариантов осуществления, представленных в настоящем описании, будь то при соединении захватного листа 3 с горизонтальной жесткой платформой в целях непосредственного захвата положения лежа, или с вертикальной жесткой платформой для непосредственного захвата положения стоя, или во всех точках между ними для изменения степени принятия положения лежа со 'сниженным эффективным значением силы тяжести'.
В альтернативном варианте осуществления предложена версия системы, устройства и способа по настоящему изобретению пониженной функциональности, где используется матрица отображения давления вместо плавающего полотна. Отображение давления предполагает получение результатов измерения давления на границе раздела между телом и опорной поверхностью, используя систему датчиков или трансдьюсеров, распределенных на поверхности, внутри поверхности или под поверхностью в виде сенсорной карты или как-то иначе. Типичными системами построения карты давления являются Xsensor (TM) или Tekscan (TM). Сам по себе данный вариант осуществления с пониженной функциональностью, не включающий в себя плавающее полотно, фотокамеру и не обладающий функциональной возможностью предоставления 3D-данных изображения, обеспечит получение улучшенных или ʺболее точныхʺ данных отображения давления, поскольку искажение формы тела, вызванное тем, что тело сопрягается с опорной поверхностью в условиях приложения полного веса, устранено.
Данная система в этом альтернативном варианте осуществления не предоставит 3D-информацию о контурах тела или кривых позвоночника. Однако она создаст карту распределения давления на основании, которое может быть оборудовано тонким стандартизированным матрасом с пористой пеной поверх матрицы отображения давления. Исследования выявили два важных момента:
1) Построение карты давления под тонким матрасом, хотя и не идентично построению карты давления поверх матраса, непосредственно связано с ним. Паттерны распределения давления на границе раздела между покупателем и матрасом могут быть напрямую и безошибочно выведены из паттернов давления между матрасом и основанием. Предпочтительно матрица отображения давления сохраняет плоское положение на жестком основании, что делает измерения значительно менее подверженными артефактам, более воспроизводимыми, а также более точными, позволяя при этом защитить датчики давления.
2) Паттерны распределения давления, замеренные при ʺэффективной пониженной гравитацииʺ, используя способ наклона на 10 или 15 градусов, соответствуют непосредственно паттернам распределения давления, замеренным при действии полного веса, требуя лишь масштабирования собственной разработки и наличия алгоритма интерпретации.
Таким образом, хотя данный альтернативный, обладающий пониженной функциональностью вариант осуществления отображения давления по настоящему изобретению не предоставит всю информацию, относящуюся к положению тела, которая возможна при использовании первого варианта осуществления системы, устройства и способа по настоящему изобретению с применением захватного листа 3, соединенного с жесткой платформой 1 (т.е. подхода с использованием ʺплавающего полотнаʺ), вариант осуществления изобретения по отображению давления, обладающий более низкой функциональностью, позволяет собрать информацию, которая может послужить достоверной основой для рекомендации матраса.
Еще один альтернативный вариант осуществления касается системы и устройство, в которых должны быть задействованы как построение карты давления, так и плавающее полотно/способы 3D-визуализации, чтобы собирать биометрические данные под различными ракурсами.
В альтернативном варианте осуществления система может содержать средство для регулировки характеристик нагнетания давления воздушной камеры между гибким листом/захватным листом и платформой-основанием, благодаря чему характеристики нагнетания давления воздушной камеры между захватным листом и платформой-основанием могут регулироваться, например, путем регулировки давления раздувания, исследуя при этом воздействие на положение тела в режиме реального времени. Например, трехмерное представление поясничной, грудной и шейной кривизны может подвергаться непрерывному мониторингу в ходе регулировки давления раздувания (а значит, и жесткости) опоры. Это позволяет каждому в отдельности порекомендовать идеальные характеристики жесткости матраса. Это может выполняться, когда система находится в горизонтальном положении или наклонена с учетом соответствующих поправок.
Дополнительные сферы применения/области использования системы, устройства и способа по настоящему изобретению
Следует понимать, что наряду со способом сбора данных о форме тела для категоризации тела с целью оптимального выбора матраса, система, устройство и способ по настоящему изобретению могут использоваться в других областях применения.
Например, информация о форме тела, собранная в соответствии с системой, устройством и способом по настоящему изобретению, может использоваться в магазинах одежды, чтобы предложить наиболее подходящий размер одежды и подгонку по фигуре. В качестве другого примера эти данные могут использоваться для эргономических расчетов при разработке по индивидуальному заказу производственных помещений, кухонь или рабочих мест. Данные, сгенерированные системой, доступные в электронном виде, могут использоваться в качестве 'отличительных признаков тела' при заказе одежды или мебели в режиме online.
В число примеров медицинского применения может входить отслеживание развития заболевания, такого как отек, путем мониторинга трехмерного объема конечностей. В качестве альтернативы - трехмерные снимки 'до и после', связанные с реконструктивной или косметической хирургией (например, при уменьшении или изменении формы груди).
Применение в спорте может включать использование системы в гимнастическом зале, чтобы пользователь мог контролировать прогресс в совершенствовании физических данных.
В дополнительных вариантах осуществления упрощенные версии системы способны измерять профиль окаймлений, галтелей и других элементов, используемых в постройках, например, чтобы способствовать реконструкции, идентификации или сопоставлению. Разумеется, в данной области применения ссылки на ʺтелоʺ в настоящем описании следует рассматривать как относящиеся к неодушевленному предмету.
Разумеется, следует понимать, что настоящее изобретение не ограничено деталями, представленными в настоящем описании, а определяется объемом притязаний прилагаемой формулы изобретения.
Реферат
Группа изобретений относится к устройству и способу для измерения характеристик тела, а именно к выбору матраса в соответствии с характеристиками тела. Устройство для определения характеристик тела содержит наклонную платформу, гибкий захватный лист, выполненный с возможностью облегания тела, при этом гибкий захватный лист в положении покоя определяет плоскость, имеющую ось X, ось Y и ось Z, при этом гибкий захватный лист также содержит регистрационные метки, при этом ось Z, является перпендикулярной указанной плоскости, причем в положении покоя регистрационные метки находятся в первых положениях, нагнетатель воздуха, направленный на гибкий захватный лист для обеспечения облегания тела гибким захватным листом, и фотокамеру, выполненную с возможностью наблюдения регистрационных меток во вторых положениях регистрационных меток, получаемых при облегании тела гибким захватным листом, при этом угол обзора фотокамеры смещен относительно оси Z. Способ определения характеристик формы тела содержит этапы обеспечения устройства, обеспечения фотокамеры, записи первых положений посредством камеры, прикладывания тела, так чтобы оно покоилось на гибком захватном листе, нагнетания воздуха на гибкий захватный лист для обеспечения облегания тела гибким захватным листом, вызывая перемещение регистрационных меток во вторые положения, записи вторых положений регистрационных меток. Использование группы изобретений позволяет предоставлять информацию в отношении индивидуального пользователя, при выборе матраса. 2 н. и 12 з.п. ф-лы, 10 ил.
Комментарии