Операционный стол и способ управления операционным столом - RU2643127C2
Код документа: RU2643127C2
Чертежи


Описание
Изобретение касается операционного стола, который имеет по меньшей мере один компонент, переставляемый с помощью электрического узла привода. Операционный стол имеет первый сенсорный блок для регистрации положения перестановки и/или изменения положения перестановки этого компонента. Также изобретение касается способа управления таким операционным столом.
В больничном хозяйстве обычно применяются три разных вида операционных столов, а именно, стационарные операционные столы, передвижные операционные столы и мобильные операционные столы. Стационарные операционные столы имеют колонну операционного стола, жестко соединенную с полом операционного зала, при этом они обычно не имеют основания операционного стола и питаются энергией через жестко инсталлированные кабели.
Передвижные операционные столы имеют основание колонны операционного стола, соединенное с колонной операционного стола, которое не имеет роликов и средств транспортировки и по меньшей мере при операции стоит на полу операционного зала. Передвижные операционные столы могут приподниматься и передвигаться с помощью транспортировочных каталок. Такая система, которая включает в себя передвижной операционный стол и транспортировочную каталку, называется также мобильной системой операционного стола.
Основания колонн мобильных операционных столов имеют ролики для передвижения операционного стола, так что они обладают возможностью передвижения без дополнительных вспомогательных средств. Кроме того, у мобильных операционных столов могут применяться электрические приводы передвижения, предпочтительно с плавным пуском и функцией защитного торможения, чтобы передвигать мобильный операционный стол с помощью электрического привода передвижения.
Питание энергией передвижных операционных столов и мобильных операционных столов может осуществляться от аккумуляторов, которые предпочтительно интегрированы в операционный стол, предпочтительно установлены в операционном столе или в колонне операционного стола.
Как у стационарных операционных столов, так и у передвижных операционных столов и мобильных операционных столов могут быть предусмотрены компоненты, обладающие возможностью электродвигательной перестановки, такие как, например, колонна операционного стола, обладающая возможностью электродвигательного изменения длины с целью изменения высоты поверхности для помещения пациента, установленной на колонне операционного стола, головная часть колонны операционного стола, обладающая возможностью перестановки вокруг двух ортогональных осей с целью изменения наклона или, соответственно, кантования поверхности для помещения пациента, соединенной с головной частью колонны операционного стола, и/или обладающие возможностью электродвигательной перестановки компоненты поверхности для помещения пациента.
В частности, у операционных столов, питание энергией которых осуществляется от аккумуляторов, требуется предусматривать функции энергосбережения и деактивировать сенсоры, актуаторы и функции управления, когда в течение предварительно установленного времени не была активирована ни одна функция управления посредством ввода через элемент обслуживания или иным образом инициируемая функция управления. При продолжительных операциях часто положение пациента сохраняется в течение длительных периодов времени, так что в эти периоды времени может активироваться функция энергосбережения. Когда посредством такой функции энергосбережения также деактивируются сенсорные блоки, которые сами имеют существенный расход энергии, и/или из-за которых блок управления для аналитической обработки сенсорных сигналов этого сенсорного блока имеет существенный расход энергии, может возникнуть проблема изменения положения перестановки компонента под воздействием внешней силы, в частности тогда, когда возникает дефект в другом компоненте, такой как, например, дефект тормоза двигателя. В частности, колонна операционного стола, обладающая возможностью перестановки по высоте, может опускаться под весом поверхности для помещения пациента или пациента. Если это происходит при операции, то существует опасность создания помехи для врача при проведении операции и возникновения угрозы для пациента.
Из документа DE 19955116 A1 известен блок управления для настройки приводов поверхности для помещения пациента, снимаемой с колонны операционного стола, имеющей компоненты, обладающие возможностью электродвигательной перестановки, состоящий из устройства энергопитания, управления и прибора обслуживания. Прибор обслуживания интегрирован в транспортировочную каталку для транспортировки опорной поверхности операционного стола.
Из документа DE 102007062200 A1 известен операционный стол, имеющий множество компонентов, обладающих возможностью перестановки с помощью элементов обслуживания. Состояние и/или изменение состояния по меньшей мере части элементов обслуживания регистрируется сенсорами, при этом сигналы, созданные сенсорами, передаются в обрабатывающее устройство.
Из документа DE 102005054223 A1 известно устройство для перестановки операционного стола, имеющее колонну операционного стола, на которой установлена переставляемая поверхность для помещения пациента. Устройство включает в себя прибор обслуживания для ввода команд перестановки с целью перестановки компонентов операционного стола. Команды перестановки могут передаваться от прибора обслуживания непосредственно к переставляемой опорной поверхности.
Из документа DE 102005053754 A1 известно устройство для перестановки поверхности для помещения пациента операционного стола, которое включает в себя несколько переставляемых друг относительно друга сегментов. По меньшей мере часть переставляемых сегментов соединена с актуаторами, которые обладают возможностью настройки с целью перестановки надлежащих сегментов. Актуаторы представляют собой предпочтительно электродвигатели. Устройство ввода имеет средства для ввода команд перестановки, касающихся частей тела, которые связаны с перестановкой положения части тела или участка тела пациента, лежащего на поверхности для помещения пациента.
Задачей изобретения является предложить операционный стол и способ управления операционным столом, с помощью которых может сокращаться потребление энергии операционного стола при операции и с помощью которых устраняется возникновение угрозы для пациента.
Эта задача решается с помощью операционного стола с признаками п.1 формулы изобретения, а также способа управления операционным столом с признаками независимого пункта способа. Предпочтительные усовершенствования изобретения указаны в зависимых пунктах формулы изобретения.
У операционного стола с признаками п.1 формулы изобретения во втором рабочем режиме блока управления, который предпочтительно представляет собой режим энергосбережения, первый сенсорный блок деактивируется и активируется второй сенсорный блок для контроля изменения положения перестановки компонента. В первом рабочем режиме блока управления первый сенсорный блок активирован. Кроме того, в первом рабочем режиме может активироваться узел привода для перестановки компонента с помощью элемента обслуживания. Блок управления переходит из первого во второй рабочий режим, когда узел привода не был активирован в течение предварительно установленного периода времени. Блок управления переходит из второго рабочего режима в первый, когда второй сенсорный блок обнаруживает изменение положения перестановки компонента. При этом в качестве второго сенсорного блока может быть предусмотрен сенсорный блок простой конструкции, который при изменении положения перестановки компонента предпочтительно подает бинарный сигнал. Такой сенсорный блок не нуждается или нуждается только в небольшом количестве энергии. Также аналитическая обработка этого бинарного сенсорного сигнала с помощью блока управления может осуществляться без больших вычислительных затрат, так что для второго сенсорного блока и для аналитической обработки сенсорного сигнала второго сенсорного блока не требуется или требуется только относительно небольшое количество энергии по сравнению с активированием первого сенсорного блока и аналитической обработкой сенсорного сигнала первого сенсорного блока в первом рабочем режиме. Однако с помощью второго сенсорного блока обеспечивается, что изменение положения перестановки компонента обнаруживается, когда первый сенсорный блок деактивирован, так что могут приниматься надлежащие меры для предотвращения угрозы пациенту во время операции.
Предпочтительно второй рабочий режим представляет собой режим энергосбережения, в котором первый сенсорный блок и/или по меньшей мере часть функций управления блока управления деактивированы. Тем самым достигается сокращение потребления энергии операционного стола во время операции.
Кроме того, предпочтительно, когда значение предварительно установленного периода времени может изменяться посредством управляющего ввода с блока обслуживания блока управления пользователем до значения в допустимом предварительно установленном диапазоне. Этот блок обслуживания может, в частности, представлять собой дистанционное управление, имеющее элементы обслуживания для обслуживания операционного стола. При этом период времени, после которого блок управления переходит из первого рабочего режима во второй рабочий режим, может изменяться простым образом, в частности по личным желаниям хирурга, и/или адаптироваться к ходу операции. Предпочтительно предварительно установленный период времени имеет значение в диапазоне от 1 секунды до 1 часа, в частности от 10 секунд до 10 минут. С помощью предварительно установленного значения в одном из этих указанных диапазонов достигается отсутствие негативного влияния изменения рабочего режима на ход операции и возможность экономии энергии посредством перехода во второй рабочий режим во время операции.
Особенно предпочтительно, если после перехода из второго рабочего режима в первый рабочий режим вследствие обнаружения изменения положения перестановки компонента вторым сенсорным блоком блок управления даже по истечении предварительно установленного периода времени остается в первом рабочем режиме. Благодаря этому положение перестановки компонента после перехода из второго рабочего режима в первый рабочий режим вследствие обнаружения изменения положения перестановки компонента вторым сенсорным блоком во втором рабочем режиме может обнаруживаться и контролироваться в первом рабочем режиме первым сенсорным блоком. Блок управления может при этом настраивать узел привода в зависимости от сенсорного сигнала первого сенсорного блока таким образом, что контроль и при необходимости корректировка установленного с помощью элемента обслуживания положения перестановки компонента осуществляется предпочтительно автоматически без дополнительного управляющего ввода. Благодаря этому автоматическое противодействие нежелательному движению осуществляется блоком управления совместно с узлом привода. Это целесообразно, в частности, тогда, когда исходят из того, что с помощью второго сенсорного блока обнаруживается неправильное состояние операционного стола, так как тогда посредством управления узлом привода в зависимости от сенсорного сигнала первого блока управления (сенсорного блока) обеспечивается необходимая при известных условиях корректировка установленного посредством элемента обслуживания, желаемого положения перестановки компонента, так что негативное влияние при операции и, тем более, угроза для пациента отсутствует.
Также предпочтительно, когда блок управления активирует контроль шагового положения шагового двигателя, служащего узлом привода, и/или когда блок управления замыкает накоротко обмотку электродвигателя, служащего узлом привода. Тем самым может предотвращаться нежелательное изменение положения перестановки компонента или замедляться изменение положения перестановки компонента.
Особенно предпочтительно, когда узел привода включает в себя тормоз, который активирован по меньшей мере во втором рабочем режиме. Предпочтительно этот тормоз активируется с помощью силы пружины и деактивируется с помощью электрического привода, так что тормоз в обесточенном состоянии узла привода активирован и, в частности, препятствует вращению вала якоря электродвигателя узла привода. При неисправности этого тормоза также во втором рабочем режиме второй сенсорный блок обнаруживал бы изменение положения перестановки компонента, так что неисправность тормоза может просто и надежно обнаруживаться с помощью второго сенсорного блока.
Особенно предпочтительно, когда компонент представляет собой узел перестановки высоты, узел перестановки продольного наклона или узел перестановки наклона кантования колонны операционного стола, и когда положение перестановки высоты поверхности для помещения пациента, соединенной с колонной операционного стола, касается перестановки продольного наклона поверхности для помещения пациента и/или перестановки наклона кантования поверхности для помещения пациента. Тем самым обеспечивается, что по меньшей мере одна центральная опция перестановки колонны операционного стола с помощью второго сенсорного узла контролируется также во втором рабочем режиме блока управления. При этом перестановкой продольного наклона называется поворот поверхности для помещения пациента вокруг оси вращения, которая ортогональна продольной оси поверхности для помещения пациента или оси, проходящей параллельно продольной оси поверхности для помещения пациента в той же самой перпендикулярной плоскости, в которой проходит также продольная ось. Перестановкой наклона кантования называется поворот поверхности для помещения пациента вокруг ее продольной оси или вокруг оси вращения, проходящей параллельно продольной оси поверхности для помещения пациента в той же самой перпендикулярной плоскости, в которой также проходит продольная ось.
Также предпочтительно, когда второй сенсорный блок включает в себя по меньшей мере один герконовый выключатель, который обнаруживает вращение вала отбора мощности электродвигателя, служащего узлом привода, и/или вращение элемента, находящегося в зацеплении с валом отбора мощности. В частности, для этого надо только соединить постоянный магнит с валом отбора мощности или интегрировать в него, или, соответственно, соединить с элементом, находящимся в зацеплении с валом отбора мощности, или интегрировать в него, чтобы с помощью простого герконового выключателя обнаруживать изменение положения перестановки компонента. Тогда для аналитической обработки второго сенсорного блока надо только контролировать изменение состояния включения герконового выключателя. При изменении состояния включения следует исходить из изменения положения перестановки компонента, так что во втором рабочем состоянии блока управления надо исходить из неправильного функционирования операционного стола или, соответственно, из неисправности одного из конструктивных узлов операционного стола. Герконовые выключатели являются очень механически прочными, экономичными и занимают относительно мало конструктивного пространства.
Также предпочтительно, когда герконовый выключатель обнаруживает вращение вала отбора мощности или элемента, находящегося в зацеплении с валом отбора мощности, по меньшей мере тогда, когда осуществляется вращение вала отбора мощности или элемента, находящегося с ним в зацеплении, на заданный угол в диапазоне от 1° до 360°, предпочтительно в диапазоне от 45° до 90°. Благодаря этому, в частности, посредством выбора надлежащего передаточного отношения может обнаруживаться уже небольшое изменение положения перестановки компонента, так что может заранее замечаться перестановка и предотвращаться возникновение угрозы для пациента.
Особенно предпочтительно, когда элемент, находящийся в зацеплении с узлом привода, представляет собой конструктивный элемент передачи, соединенной с узлом привода. Благодаря этому второй сенсорный блок может просто соединяться с конструктивным элементом, требующимся для привода компонента, и не требуется никакое вмешательство в электродвигатель, в котором обычно имеется в распоряжении мало конструктивного пространства. Также благодаря этому для привода может применяться обычный имеющийся в продаже электродвигатель, который не должен специально адаптироваться к применению в соответствии с изобретением.
Также предпочтительно, когда при активировании элемента обслуживания осуществляется изменение рабочего режима со второго рабочего режима на первый рабочий режим. Благодаря этому простым образом снова возможен выход из второго рабочего режима, служащего режимом энергосбережения, так что затем в первом рабочем режиме снова с помощью узла привода положение перестановки компонента может активно изменяться посредством управляющего ввода оператором.
После повторного истечения периода времени блок управления снова переходит из первого рабочего режима во второй рабочий режим. Этот переход из первого во второй рабочий режим и из второго рабочего режима в первый рабочий режим может повторяться сколь угодно часто, однако предпочтительно только до осуществления перехода из второго в первый рабочий режим вследствие обнаружения изменения положения перестановки компонента вторым сенсорным блоком.
Особенно предпочтительно, когда операционный стол представляет собой мобильный операционный стол или передвижной операционный стол, у которых электропитание узла привода, блока управления, первого сенсорного блока и второго сенсорного блока осуществляется с помощью аккумулятора. Благодаря этому при надлежащем расчете аккумулятора может достигаться отсутствие необходимости его дозарядки или замены на другой аккумулятор даже при продолжительных операциях. Тем самым обеспечен бесперебойный ход операции.
Второй аспект изобретения касается способа управления операционным столом, при котором с помощью электрического узла привода переставляется по меньшей мере один переставляемый компонент операционного стола, и при котором с помощью первого сенсорного блока обнаруживается положение перестановки и/или изменение положения перестановки компонента. В первом рабочем режиме блока управления активируется первый сенсорный блок. Также в первом рабочем режиме с помощью элемента обслуживания может активироваться узел привода для перестановки компонента.
Во втором рабочем режиме блока управления первый сенсорный блок деактивируется. Также во втором рабочем режиме активирован второй сенсорный блок для контроля положения перестановки компонента. Переключение из первого во второй рабочий режим происходит, когда узел привода не был активирован на протяжении предварительно установленного периода времени. Также переключение из второго в первый рабочий режим происходит, когда вторым сенсорным блоком обнаруживается изменение положения перестановки компонента. Благодаря этому возможна энергосберегающая эксплуатация операционного стола, при этом предотвращается возникновение угрозы для пациента при операции.
Этот способ по второму аспекту может совершенствоваться предпочтительными усовершенствованиями, указанными выше для операционного стола, при этом указанные или, соответственно, требуемые шаги способа выполняются блоком управления совместно с сенсорными блоками и узлом привода.
Другие признаки и преимущества изобретения содержатся в последующем описании, которое поясняет изобретение подробнее на примерах осуществления со ссылкой на прилагаемые чертежи.
Показано:
фиг.1a: операционный стол, имеющий несколько компонентов, переставляемых с помощью элементов обслуживания, доступных через беспроводное дистанционное управление, в исходном положении;
фиг.1b: дистанционное управление и операционный стол в соответствии с фиг. 1a после перестановки наклона кантования, начиная из исходного положения в соответствии с фиг. 1a;
фиг.1c: дистанционное управление и операционный стол в соответствии с фиг.1a и 1b во втором положении перестановки относительно исходного положения, показанного на фиг.1a, при этом поверхность для помещения пациента была повернута вокруг оси вращения, проходящей ортогонально к ее продольной оси, с целью перестановки продольного наклона, и дополнительно компоненты поверхности для помещения пациента были повернуты вокруг нескольких осей вращения относительно средней панели поверхности для помещения пациента;
фиг.2: узел привода, имеющий электродвигатель и привод с ходовым винтом для изменения длины обладающей возможностью изменения длины колонны операционного стола в соответствии с фиг.1a-1c, имеющий предлагаемый изобретением сенсорный узел для обнаружения вращения вала отбора мощности электродвигателя при неактивированном электродвигателе;
фиг.3: узел привода в соответствии с фиг.2 после вращения вала отбора мощности электродвигателя, начиная из положения, показанного на фиг.2; и
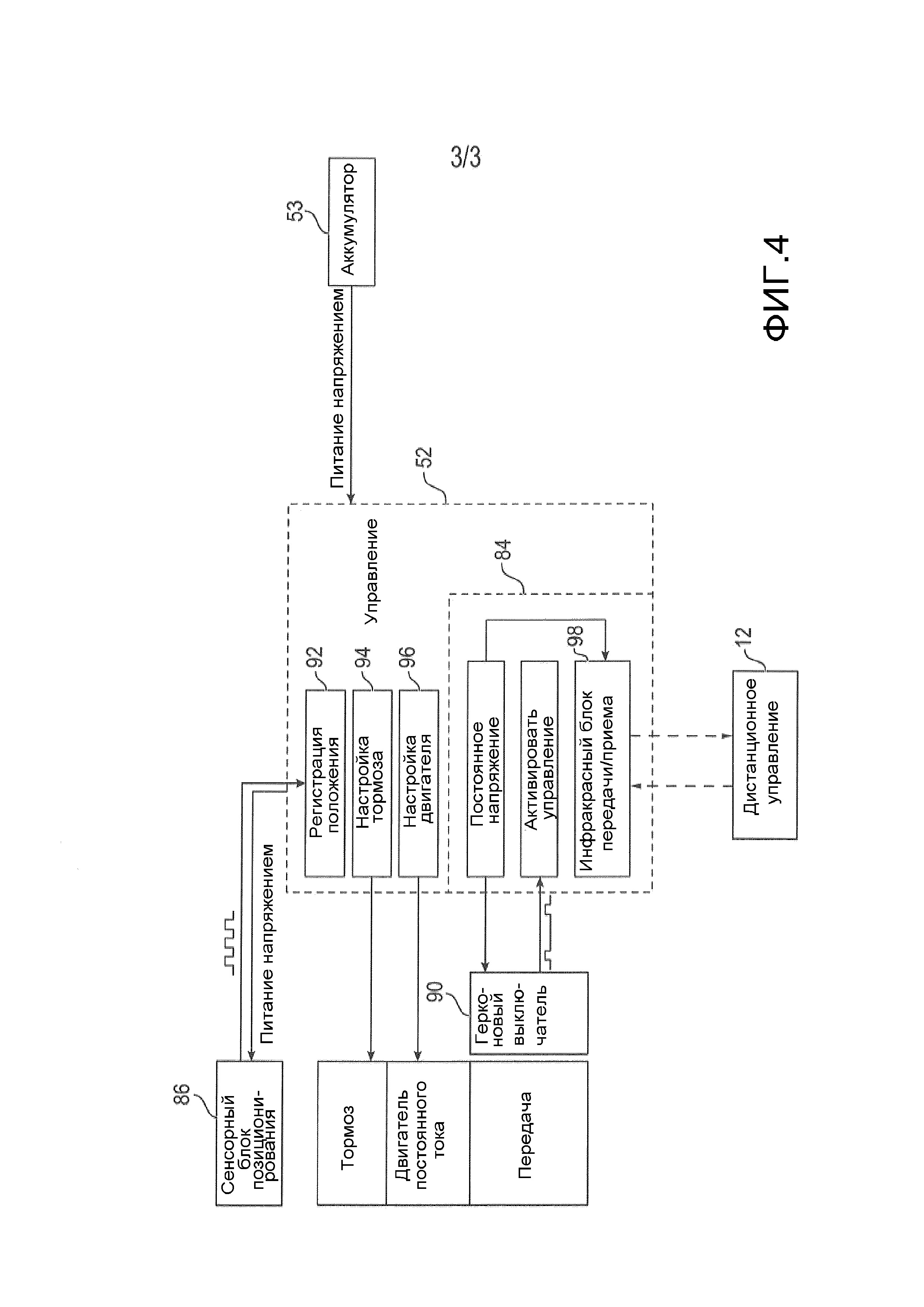
фиг.4: блок-схема управления операционного стола в соответствии с фиг. 1a-1c, имеющего узел привода в соответствии с фиг.2.
На фиг.1a показана система 10, имеющая дистанционное управление 12, которое имеет несколько элементов 14-28 обслуживания, с помощью которых переставляемые компоненты 32-46 операционного стола 30 могут переставляться, т.е. изменять свое положение в пространстве и/или относительно других компонентов 32-46. Для отдельных компонентов 32-46 или групп этих компонентов 32-46 предназначены элементы 14-28 обслуживания дистанционного управления 12, так что при приведении в действие одного из элементов 14-28 обслуживания выполняется соответствующее действие перестановки компонента 32-46 или группы компонентов, для которых предназначен этот элемент 14-28 обслуживания, с помощью предусмотренного для этого узла привода. В качестве примера изображен узел 41 привода для изменения длины колонны 40 операционного стола. На нижнем конце колонны 40 операционного стола предусмотрено основание 50 колонны операционного стола. На противоположном конце колонна 40 операционного стола соединена с поверхностью 31 для помещения пациента, включающей в себя компоненты 32-36, 42-46. Таким образом, с помощью узла 41 привода может варьироваться длина колонны 40 операционного стола и при этом изменяться высота поверхности 31 для помещения пациента над полом, т.е. в направлении стрелок P1 и P2 для приведения пациента, лежащего на поверхности 31 для помещения пациента, в надлежащее для проводимой операции положение.
Операционный стол 30 включает в себя другие, не изображенные узлы привода для изменения положения поверхности 31 для помещения пациента, в частности для перестановки продольного наклона и/или для перестановки наклона кантования поверхности 31 для помещения пациента, а также для перестановки отдельных компонентов поверхности 31 для помещения пациента относительно других компонентов, как это, в частности, изображено на фиг.1c. На фиг.1b поверхность 31 для помещения пациента была повернута вокруг своей продольной оси 54 в направлении стрелки P3, так что поверхность 31 для помещения пациента была перекантована в сторону. Такое кантование в сторону называется перестановкой наклона кантования. Как можно видеть по средней части 42 поверхности 31 для помещения пациента на фиг.1c, поверхность 31 для помещения пациента по сравнению с фиг.1a была повернута вокруг оси 56 вращения, проходящей перпендикулярно к продольной оси 54 поверхности 31 для помещения пациента, в направлении стрелки P4, так что произошла перестановка продольного наклона поверхности для помещения пациента. Кроме того, с помощью узла 41 привода длина колонны 40 операционного стола была сокращена, и при этом поверхность 31 для помещения пациента опущена в направлении стрелки P2.
Также было изменено положение задней части 44 относительно средней части 42 посредством вращения вокруг оси 58 вращения и положение головной части 46 относительно задней части 44 поверхности 31 для помещения пациента посредством вращения вокруг оси 60 вращения. Также было изменено положение панелей для ног, включающих с себя сегменты 34 и 36 или, соответственно, 32 и 38, относительно средней части 42 поверхности 31 для помещения пациента посредством соответствующего вращения сегментов 32-38 вокруг осей 62, 64 и 66 вращения. Сокращенная высота поверхности для помещения пациента указана стрелкой P5 на фиг.1c.
В первом рабочем режиме блока 52 управления неизображенный первый сенсорный блок точно регистрирует высоту или, соответственно, изменение высоты поверхности 31 для помещения пациента или длину колонны 40 операционного стола или, соответственно, изменение длины колонны 40 операционного стола, при этом, в частности, для аналитической обработки сенсорных сигналов первого сенсорного блока блоком 52 управления активированы функции управления с относительно большим потреблением энергии. Питание энергией блока 52 управления и первого сенсорного блока, а также узлов 41 привода для перестановки компонентов, осуществляется от расположенного в колонне 40 операционного стола аккумулятора 53. Итак, если в течение предварительно установленного времени не происходит активирование узла 41 привода посредством приведения в действие элементов 14-28 обслуживания дистанционного управления 12, то блок 52 управления переходит из первого рабочего режима во второй рабочий режим, который служит режимом энергосбережения и в котором узел 41 привода и первый сенсорный блок деактивированы. Первый сенсорный блок называется также сенсорным блоком позиционирования.
Во втором рабочем режиме активирован второй сенсорный блок для контроля изменения положения перестановки компонента 40. Конструкция и функция этого второго сенсорного блока поясняется еще подробнее ниже со ссылкой на фиг. 2.
На фиг.2 показан фрагмент узла 41 привода для перестановки высоты колонны 40 операционного стола 30 в соответствии с фиг.1a-1c. Узел 41 привода включает в себя электродвигатель 70, с валом 71 отбора мощности которого соединено первое зубчатое колесо 72. Ведомое зубчатое колесо 72 через цепь 76 осуществляет привод второго зубчатого колеса 74, соединенного с ходовым винтом 78. Вследствие вращения ходового винта 78 соединительный элемент 80 перемещается в направлении стрелки P1 вверх или, соответственно, при обратном направлении вращения в направлении стрелки P2 вниз. Посредством соединительного элемента 80 изменяется длина телескопической колонны 40 операционного стола. Определение длины колонны 40 операционного стола или, соответственно, высоты поверхности 31 для помещения пациента, соединенной с колонной 40 операционного стола, осуществляется с помощью используемого в качестве сенсорного блока сенсорного блока 86 позиционирования. Сенсорный блок 86 позиционирования через сигнальный провод соединен с блоком 52 управления. Блок 52 управления осуществляет аналитическую обработку сенсорных сигналов сенсорного блока 86 позиционирования.
Узел 41 привода включает в себя выполненный в виде герконового выключателя 90 второй сенсорный блок 90, который, в зависимости от положения магнитов 82a-82d, расположенных на периметрической поверхности фланца зубчатого колеса 72 на угловом расстоянии 90°, изменяет свое состояние включения, т.е. свое значение сигнала, которое аналитически обрабатывается контрольной схемой 84 блока 52 управления. При вращении вала отбора мощности электродвигателя 70 в направлении стрелки P6 осуществляется вращение ходового винта 78 в направлении стрелки P7, так что магнит 82d располагается напротив сенсорного блока 90, как это изображено на фиг.3.
На фиг.3 для наглядного изображения электродвигатель 70 был удален. Состояние включения герконового выключателя 90 при вращении в направлении стрелки P6 в изображенном на фиг.3 положении было изменено по сравнению с положением, изображенным на фиг.2. Альтернативно сенсорному блоку 86 позиционирования первый сенсорный блок также может быть выполнен в виде инкрементального датчика, который регистрирует вращение ходового винта 78.
Сенсорный блок 86 позиционирования активен в первом рабочем режиме блока 52 управления. Во втором рабочем режиме, который является режимом энергосбережения операционного стола 30, как электродвигатель 70, так и сенсорный блок 86 позиционирования деактивированы. Кроме того, активна только функция управления схемы 84 управления блока 52 управления, которая обнаруживает изменение состояния включения герконового выключателя 90 во втором рабочем режиме. Далее, схема 84 управления блока 52 управления регистрирует управляющие данные, введенные посредством дистанционного управления, при этом схема 84 управления осуществляет изменение рабочего режима блока 52 управления со второго рабочего режима в первый рабочий режим, когда во втором рабочем режиме происходит изменение состояния включения герконового выключателя 90 или управляющий ввод посредством дистанционного управления 12. Если происходит смена рабочего режима со второго рабочего режима в первый рабочий режим вследствие изменения состояния включения герконового выключателя 90, после этого сенсорный блок 86 позиционирования непрерывно активируется, так что осуществляется активный контроль высоты поверхности 31 для помещения пациента. В частности, при обнаруженном с помощью сенсорного блока 86 позиционирования отклонении положения от предварительно установленного положения выполняется корректировка положения посредством надлежащей настройки электродвигателя 70.
Электродвигатель 70 включает в себя узел торможения, который в обесточенном состоянии действует с тормозной силой на вал 71 отбора мощности электродвигателя 70 и, следовательно, на вал 71 отбора мощности электродвигателя 70. Тем самым предотвращается изменение положения соединительного элемента 80 при деактивированном электродвигателе 70. При неисправности этого узла торможения положение соединительного элемента 80 может, однако, изменяться, в частности, под силой веса поверхности 31 для помещения пациента и лежащего на ней пациента. Тогда такое изменение положения, произошедшее вследствие неисправности тормоза, обнаруживается с помощью герконового выключателя 90 совместно с магнитами 82a-82d. Когда после этого предотвращается, чтобы даже по истечении предварительно установленного времени ожидания происходил переход из первого рабочего режима во второй рабочий режим, обеспечено, что положение соединительного элемента 80 обеспечено активированным в этом случае контролем положения и корректировкой с помощью сенсорного блока 86 позиционирования совместно с электродвигателем 70.
На фиг.4 показана блок-схема узла 41 привода. Как видно из блок-схемы, питание напряжением блока 52 управления осуществляется от аккумулятора 53. Блок 52 управления снабжает сенсорный блок 86 позиционирования питающим напряжением и получает в качестве сенсорного сигнала от сенсорного блока 89 позиционирования предпочтительно бинарный сигнал, который аналитически обрабатывается с помощью функции 92 регистрации положения блока 52 управления. При желаемом изменении положения соединительного элемента 80 с помощью функции 94 настройки тормоза тормоз двигателя 70 отпускается, и с помощью функции 96 настройки двигателя настраивается двигатель 70, так что он осуществляет желаемое вращение зубчатого колеса 72. Функции 92-96 управления, а также при необходимости другие функции управления в первом рабочем режиме активированы, а во втором рабочем режиме, т.е. в режиме энергосбережения, деактивированы. Во втором рабочем режиме посредством питания напряжением от аккумулятора 53 активирована функция 84 управления блока 52 управления, так что герконовый выключатель 90 питается напряжением.
При обнаружении изменения состояния включения герконового выключателя 90 с помощью схемы 84 управления она осуществляет изменение рабочего режима блока 52 управления со второго рабочего режима в первый рабочий режим, в котором функции 92-96 управления снова активированы. Также схема 84 управления включает в себя аналитическую оценку сигналов блока 98 приема и/или передачи для приема посланной посредством дистанционного управления 12 операционной информации. При приеме такой операционной информации, тоже посредством функции 84 управления, рабочий режим блока 52 управления изменяется со второго рабочего режима на первый рабочий режим.
В принципе, изменение рабочего режима с первого рабочего режима на второй рабочий режим происходит, когда в течение предварительно установленного периода времени дистанционным управлением 12 никакая операционная информация не была послана блоку 98 передачи/приема. Однако тогда переход из первого рабочего режима во второй рабочий режим не происходит, если вследствие изменения состояния включения герконового выключателя 90 во втором рабочем режиме произошло переключение со второго рабочего режима на первый рабочий режим. В принципе, исходят из того, что узел 41 привода имеет неисправность, когда во втором рабочем режиме обнаруживается изменение состояния включения герконового выключателя 90. Тогда, исходя из этого, первый рабочий режим сохраняется, чтобы обеспечить надежную эксплуатацию операционного стола 30, а также связанное с ней надежное выполнение операции.
Герконовые выключатели 90, которые также называются герконовыми контактами, могут быть выполнены в виде вплавленных в стеклянную трубку контактных язычков. Эти контактные язычки могут, в частности, содержать железно-никелевый сплав, так что контактные язычки могут приводиться в действие посредством магнита. Вследствие расположения контактных язычков в стеклянной трубке герконовые выключатели представляют собой герметически плотные выключатели, которые приводятся в действие магнитным полем. Контактные язычки по меньшей мере в одной отдельной области должны иметь ферромагнитный материал. Такие герконовые выключатели 90 имеют малую конструктивную высоту по сравнению с традиционными контактами и позволяют выполнять быстрые процессы переключения. Герконовые выключатели 90 могут быть выполнены в виде размыкающих контактов, замыкающих контактов или переключающих контактов или, соответственно, переключателей.
Кроме того, в одном из вариантов осуществления изобретение может описываться следующим образом. Магнит или, соответственно, несколько магнитов 82a-82d крепятся на вращающемся вокруг оси конструктивном элементе, таком как, например, цепная звездочка 72, зубчатое колесо или вал, в трансмиссии узла 41 привода операционного стола 30. При движении вращающегося конструктивного элемента 72 магнит или, соответственно, магниты 82a-82d проводятся мимо герконового выключателя 90. Изменение состояния включения герконового выключателя 90 и вызываемое этим изменение значения сигнала герконового выключателя 90 при соответствующем питании напряжением герконового выключателя 90 может использоваться в качестве сигнала для изменения рабочего режима со второго рабочего режима на первый рабочий режим. Когда регистрируется положение приводного двигателя 70 посредством инкрементального датчика в первом рабочем режиме, при установке герконового выключателя 90 может обеспечиваться обнаружение вращения вращающегося конструктивного элемента 72. Упомянутые инкрементальные датчики не указывают абсолютное положение, а регистрируют только относительные изменения положения, аналитическая обработка которых возможна только при активированной соответствующей функции 92 управления блока 52 управления. Когда функция 92 управления во втором рабочем режиме, т.е. временно, деактивируется, например, для сбережения энергии, и в этот период времени происходит движение привода 41, то это движение не регистрируется инкрементальным датчиком или, соответственно, не подвергается аналитической обработке блоком 52 управления. Если происходит изменение рабочего режима со второго рабочего режима на первый рабочий режим вследствие процесса переключения герконового выключателя 90, блок 52 управления непрерывно работает в первом рабочем режиме, так что дальнейшее неправильное функционирование предотвращается.
Хотя описанная со ссылкой на чертежи возможность переключения блока управления с первого рабочего режима на второй рабочий режим с целью энергосбережения и контроль положения или, соответственно, изменения положения компонента во втором рабочем режиме с помощью второго сенсорного блока была описана в связи с узлом 41 привода для привода перестановки высоты колонны 40 операционного стола, однако тот же метод может предусматриваться у любого другого узла привода операционного стола 30, в частности узлов привода для изменения положения компонентов 32-38, 42-48.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 Операционный стол
12 Дистанционное управление
14-28 Элемент обслуживания
30 Операционный стол
31 Поверхность для помещения пациента
32-38, 42-46 Компоненты
40 Колонна операционного стола
41 Узел привода
50 Основание колонны операционного стола
52 Блок управления
53 Аккумулятор
54 Продольная ось поверхности для помещения пациента
56 Поперечная ось поверхности для помещения пациента
58-66 Оси поворота
70 Электродвигатель
71 Вал отбора мощности/якоря
72, 74 Зубчатое колесо
76 Цепь
78 Ходовой винт
80 Соединительный элемент
82a-82d Магнит
84 Схема переключения
86 Сенсорный блок позиционирования
90 Герконовый выключатель
92-96 Функции управления
98 Инфракрасный блок передачи/приема
P1-P7 Стрелки направлений
Реферат
Изобретение относится к операционному столу и способу управления этим столом. Изобретение направлено на снижение потребления электроэнергии при операции. Операционный стол и способ для операционного стола, при которых с помощью электрического приводного узла переставляется по меньшей мере один переставляемый компонент. С помощью первого сенсорного блока обнаруживается положение перестановки компонента. В первом рабочем режиме блока управления активируется первый сенсорный блок и может активироваться узел привода для перестановки компонента с помощью элемента обслуживания. Во втором рабочем режиме блока управления по меньшей мере первый сенсорный блок деактивируется, и активируется второй сенсорный блок для контроля изменения положения перестановки компонента. Переключение из первого во второй рабочий режим происходит, когда узел привода не был активирован в течение предварительно установленного периода времени. Кроме того, переключение из второго в первый рабочий режим происходит, когда вторым сенсорным блоком обнаруживается изменение положения перестановки компонента. 2 н. и 13 з.п. ф-лы, 6 ил.
Комментарии