Система и способ поддержания конфигурации надувного матраса - RU2392840C2
Код документа: RU2392840C2
Чертежи











Описание
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение в целом относится к терапевтическим кроватям и устройствам матрасов, а также к способам обеспечения их работы. Более конкретно данное изобретение относится к улучшенным устройствам и способам, предназначенным для управления конфигурацией и параметрами надувного матраса, использующего матрицу сетевых датчиков и модулей управления.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
С надувными матрасами, которые применяются в медицинских учреждениях, связан ряд проблем. Некоторые подобные надувные матрасы предназначены для терапевтического использования, при этом они содержат оболочки из ткани с высокой и низкой потерей воздуха, а также системы управления, которые изменяют давление воздуха внутри матраса, чтобы способствовать снижению образования у пациентов пролежней и аналогичных ухудшающих воздействий, обусловленных длительным постельным режимом. Тогда как, в общем, надувные матрасы должны быть достаточно прочными, чтобы создавать опору для пациента, они также должны быть достаточно мягкими и упругими для удобства пациента. Подобным образом при выполнении различных терапевтических изменений давления внутри надувного матраса часто бывает трудно осуществить подъем пациента с основания матраса по всей поверхности матраса. При условии, по какой бы то ни было причине вхождения пациента в соприкосновение сквозь поверхность матраса с более жестким его основанием возникает нежелательное явление, создающее неудобство, которое рассматривается как «касание дна».
Системы управления, предназначенные для поддержания накачки терапевтических матрасов и подобных устройств, должны учитывать значительные изменения в усилии, которое пациент может оказать на любую одну точку поверхности матраса в дополнение к полному усилию, оказываемому в среднем весом пациента на поверхность матраса. Точечные усилия, в общем, возникают, когда пациент ложится на постель или покидает ее, при этом он направляет руки или ноги, локти или колени в матрас у одиночной локализованной точки. Как правило, системы управления, работа которых строится на непосредственных измерениях давления внутри надувного матраса, в ряде ситуаций дают сбой в предотвращении «касания дна» пациентом.
Некоторые усилия, направленные на поддержание конфигурации матраса, включают использование увеличенного количества отдельных надувных элементов, при этом некоторые из них могут испытывать большое локализованное усилие, но вместе с присоединенными элементами они будут поддерживать пациента и предотвращать возникновение «касания дна». Проблема, связанная с матрасами, в которых используется увеличенное количество отдельных элементов, заключается в том, что каждый элемент должен быть отдельно присоединен к накачивающей системе и отдельно отслеживаться какими-либо управляющими электронными схемами, размещенными на месте. Подобные матрасы в типичном случае будут иметь протяженные и весьма сложные воздуховоды и электрические цепи, проходящие вниз и по длине матраса, которые отдельно проходят к каждой надувной и управляющей системам, связанным с надувной платформой. Размер, стоимость, сложность и обслуживание подобных систем - все становится существенным.
В патенте США №6560804, выданном на имя Wise и др. и озаглавленном «Установка и способы управления матрасом в зависимости от расстояния до пациента» (правопреемник KCI Licensing, Inc.) описана установка и способ для выявления и текущего контроля расстояния между пациентом и отсчетной точкой на надувном матрасе, а также для управления подачей воздуха в зависимости от изменений этого расстояния. Устройство для текущего контроля расстояния до пациента содержит гетеродинный детектор приближения, датчик расстояния в ответ на воздействие и датчик, чувствительный к излучению.
Описание патента США №6560804 в целом включено в данный документ посредством ссылки.
В данной области были предприняты различные другие попытки для поддержания накачки надувного матраса на определенном уровне с целью создания комфорта пациенту.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Система по данному изобретению обладает рядом принципиально новых системных характеристик и содержит отдельные элементы, которые вместе обеспечивают полную систему и способ для поддержания конфигурации надувного матраса, достаточной для создания опоры и удобства пациенту. Наряду с тем, что вся предлагаемая система является принципиально новой, имеются дополнительные отдельные компоненты, элементы и методологии, связанные с данной системой, которые также являются принципиально новыми и решают некоторые проблемы, выявленные в предшествующем уровне техники. В общих чертах последующее описание будет сконцентрировано на следующих принципиально новых характеристиках и элементах изобретения:
(1) Использование инфракрасного излучения внутри отдельных камер или групп камер.
(2) Использование облучения и мониторинга перемежающихся камер или секций с дифференциацией времени работы для уменьшения взаимной помехи между инфракрасными датчиками.
(3) Использование распределенных микропроцессорных контроллеров, образующих сетевую конфигурацию, использующую сетевые протоколы для уменьшения количества проводов и соединений, необходимых для системы в сборке.
(4) Использование различных приемов конструирования подушек и баллонов, таких как сшивание и/или ВЧ сварка, для создания отдельных камер с использованием специальных типов полупрозрачных, прозрачных и отражающих ИК излучение материалов.
(5) Использование определенных тканей типа Gortex® со свойствами низкой потери воздуха в конструкциях различных компонентов внутри системы матраса.
(6) Полная сборка матраса, включая системы управления и методологии, связанные с такими системами управления, и их общая способность улучшить поддержание соответствующего надувного профиля.
(7) Использование беспроводного блока связи с ручным управлением для вывода и ввода данных, программирования данной системы и загрузки информации о работе данной системы.
(8) Индивидуальные конструктивные решения подушек, связанные с компонентами подушек матраса для головы, туловища и ног, которые способствуют работе компонентов датчиков и контроллеров данной системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
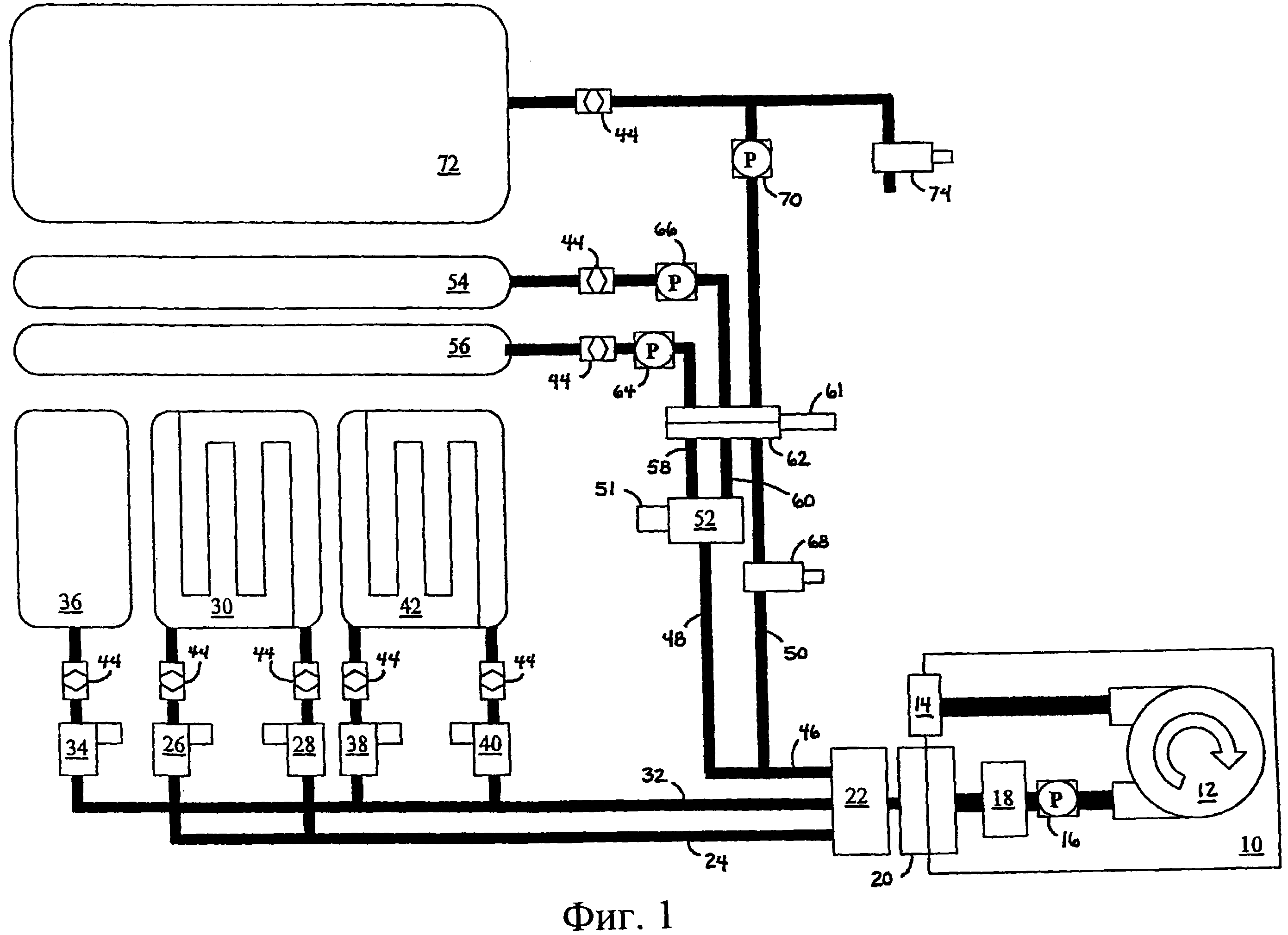
Фиг.1 представляет собой принципиальную блок-схему компонентов для потоков воздуха, воздуховодов и соединителей, связанных с выполнением данного изобретения.
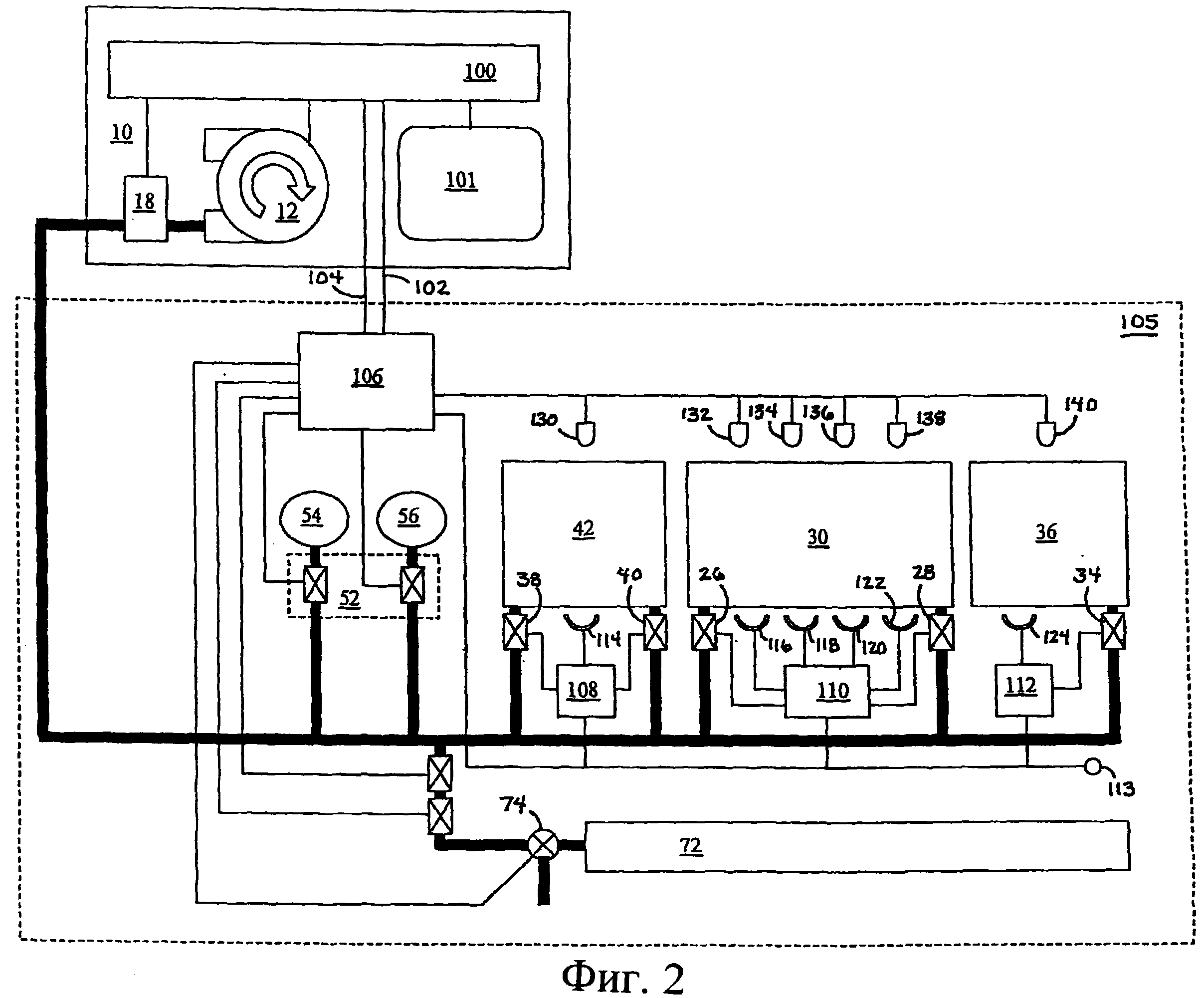
Фиг.2 представляет собой принципиальную блок-схему основных соединений для потоков воздуха, а также основных соединений для передачи сигналов электронных компонентов для всей системы по данному изобретению.
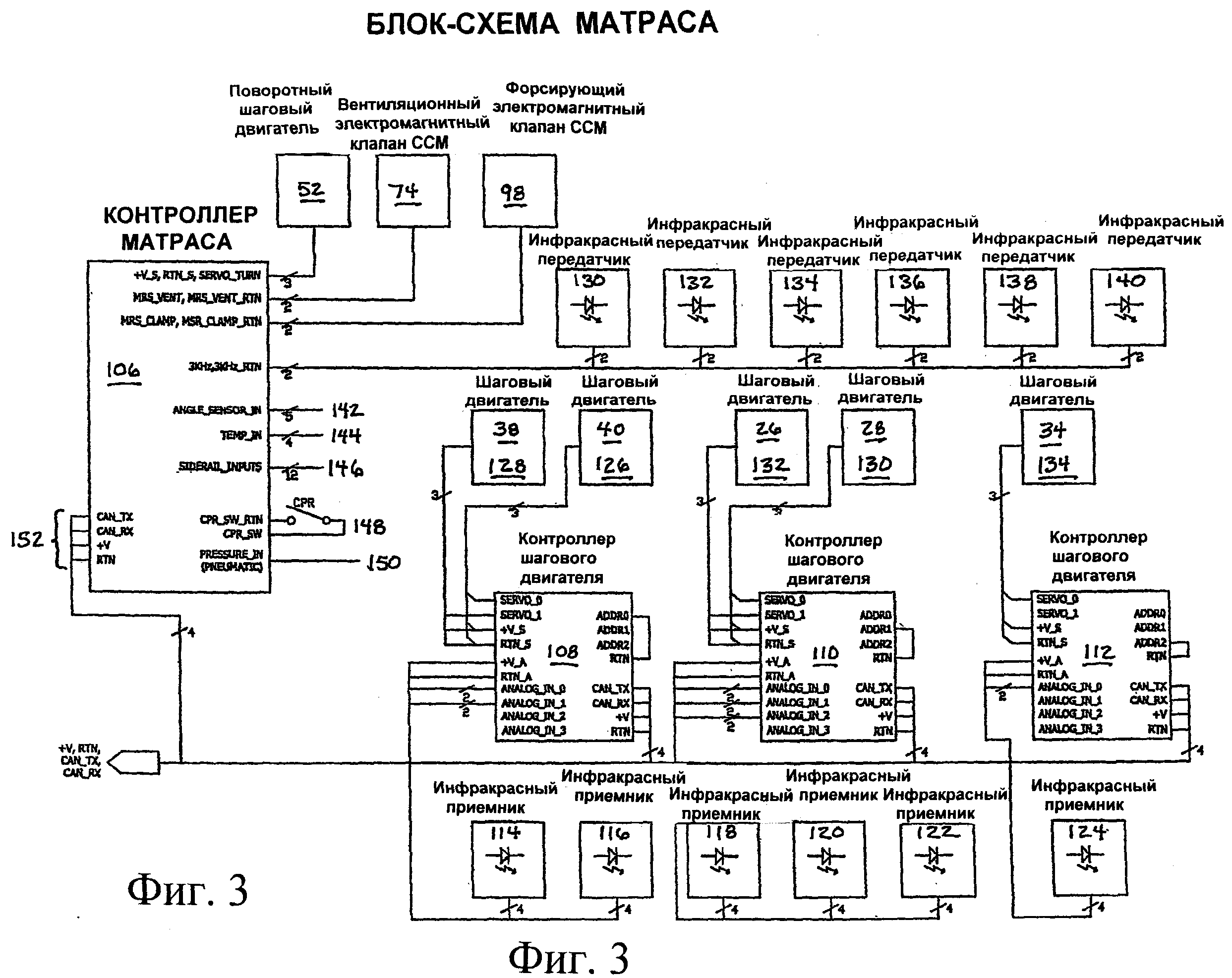
Фиг.3 представляет собой подробную (на системном уровне) электронную принципиальную схему блок-схемы матраса и компонентов датчиков сигналов по данному изобретению.
Фиг.4 представляет собой подробную (на уровне контроллеров) электронную принципиальную блок-схему контроллера матраса по данному изобретению и соответствующие ему задающие устройства и входы.
Фиг.5 представляет собой подробную (на уровне контроллеров) электронную принципиальную блок-схему компонентов контроллера клапана с пошаговым управлением (управление подушкой) по данному изобретению.
Фиг.6 представляет собой вид в аксонометрии нижней стороны промежуточного слоя контроллеров системы матраса по данному изобретению.
Фиг.7 представляет собой вид в плане нижней стороны промежуточного слоя системы матраса по данному изобретению.
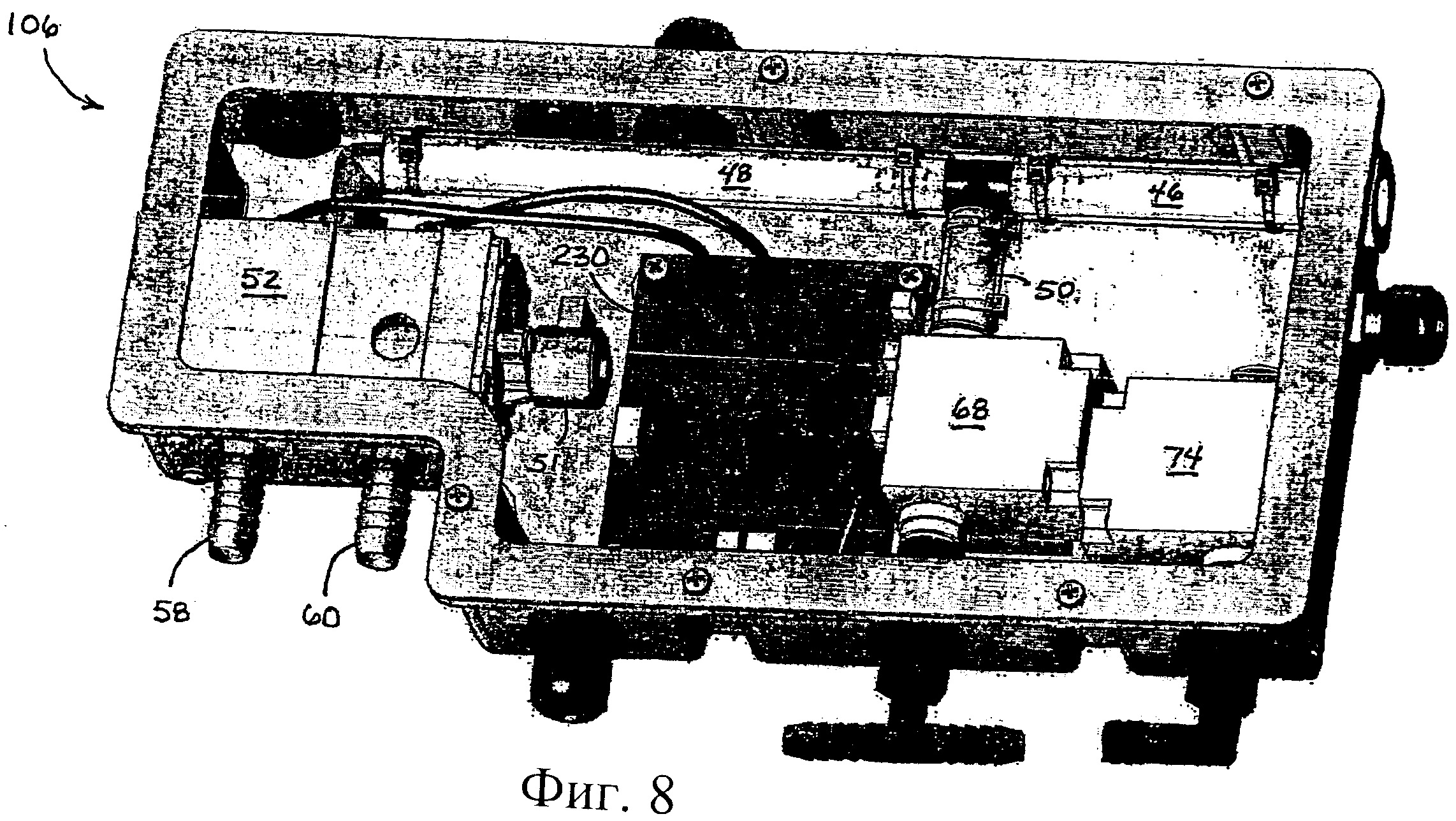
Фиг.8 представляет собой детальный вид в аксонометрии корпуса контроллера матраса предлагаемой системы.
Фиг.9 представляет собой детальный вид в аксонометрии корпуса контроллера клапана (подушки) с пошаговым управлением предлагаемой системы.
Фиг.10A, 10 В представляют собой виды в аксонометрии (сверху и снизу) компонента подушки для туловища матраса предлагаемой системы.
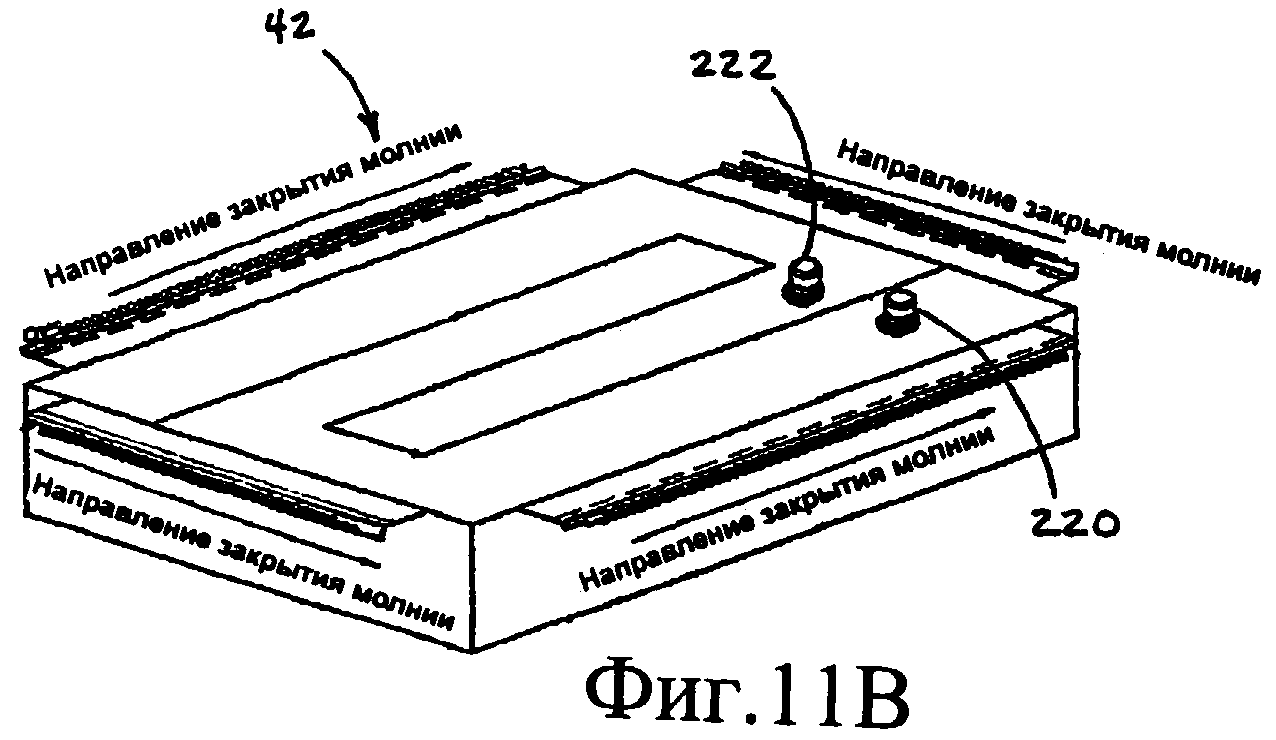
Фиг.11А и 11 В представляют собой виды в аксонометрии (сверху и снизу) компонента ножной подушки матраса предлагаемой системы.
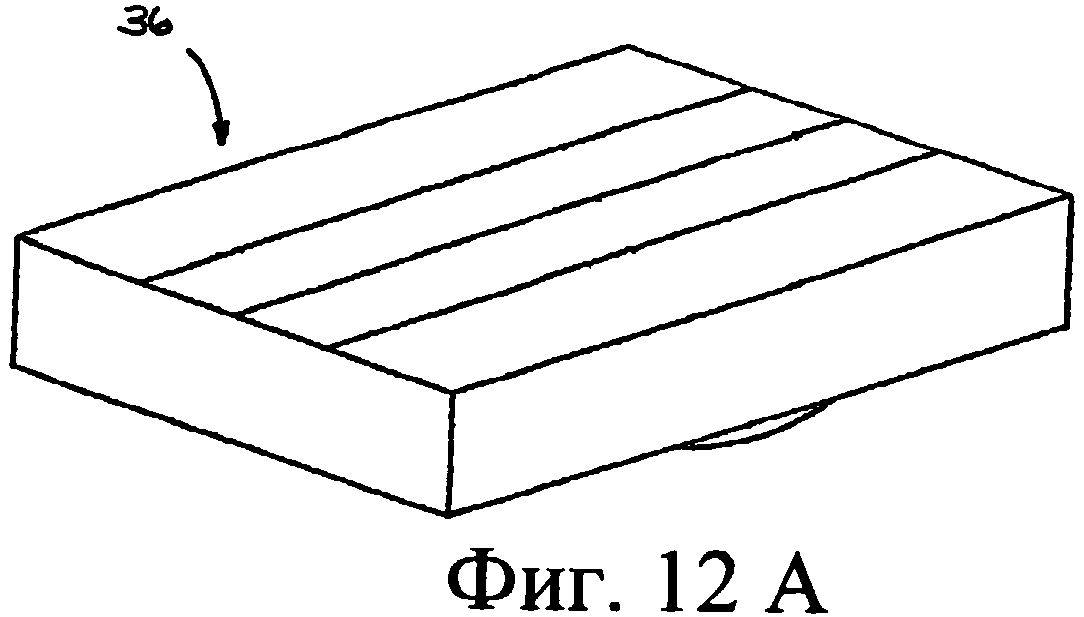
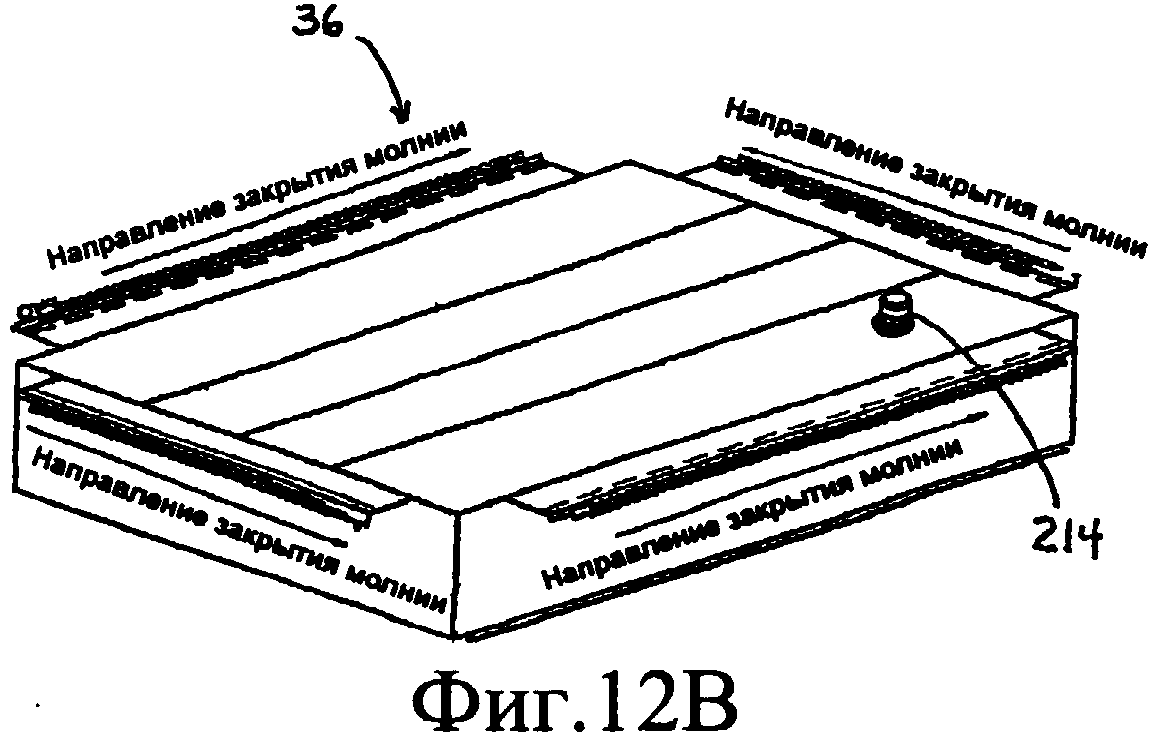
Фиг.12А и 12 В представляют собой виды в аксонометрии (сверху и снизу) компонента головной подушки матраса предлагаемой системы.
Фиг.13 представляет собой вид в аксонометрии с пространственным разделением деталей альтернативного варианта выполнения компонента подушки для туловища матраса системы по данному изобретению, иллюстрирующий расположение отражающих ИК поверхностей.
Фиг.14 представляет собой детальный вид сверху ИК компонента приемника/передатчика (т.е. датчика/излучателя) системы по данному изобретению.
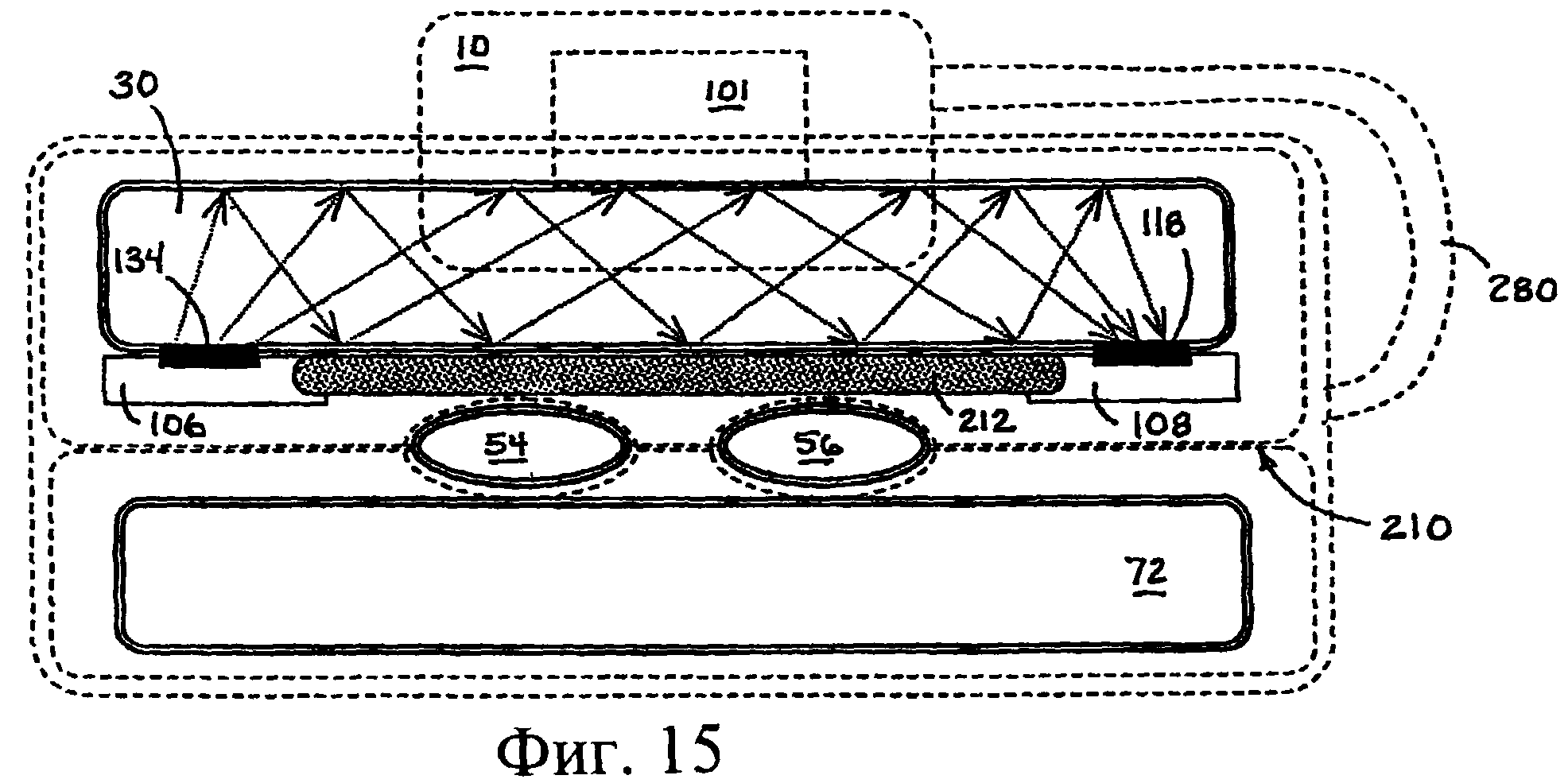
Фиг.15 представляет собой схематический поперечный разрез матраса, датчика и компонентов управления предлагаемой системы.
Фиг.16 иллюстрирует на виде в аксонометрии установку предлагаемой системы на раме типичной больничной кровати.
НАИЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ДАННОГО ИЗОБРЕТЕНИЯ
Общее представление о предложенной системе можно получить из описания со ссылкой на схематическое изображение, показанное на фиг.1. В этом представлении компоненты матраса показаны относительно различных компонентов управления, которые соединены с ним. В различных вариантах выполнения нагнетательный блок 10 может содержать нагнетательный вентилятор 12 с пылевым фильтром 14 на входе и манометром 16 на выходе, при этом воздух проходит через нагреватель 18, прежде чем будет проведен в трубопроводы данной системы. Выход блока 10 выполнен посредством шлангового соединителя 20, который объединен с коллектором соединительных деталей для воздуха, а также электрических соединений (не показаны) в том же соединительном блоке (более подробное описание которого приведено ниже). В различных вариантах выполнения шланговый соединитель 20 может быть выполнен в виде одной детали или в виде составного соединителя и может содержать ряд компонентов, таких как пружины, защелки и им подобные. Шланговый соединитель 20 совмещается и присоединяется к распределительному блоку 22, который распределяет воздушный поток из блока 10 через три раздельные трубопроводы. Первый трубопровод 24 подсоединен к двум клапанам 26 и 28 с пропорциональным управлением, которые связаны с подушкой 30 для туловища. Второй трубопровод 32 подсоединен к клапану 34 с пропорциональным управлением, связанному с головной подушкой 36, а также клапанам 38 и 40 с пропорциональным управлением, которые связаны с ножной подушкой 42. Каждый из упомянутых клапанов подсоединен к его соответствующей подушке быстроразъемным соединителем 44.
Головная подушка 36 представляет собой отдельный камерный блок (например, отдельную надувную камеру), как будет описано более подробно в дальнейшем. Данная отдельная камера присоединена быстроразъемным соединителем 44 к клапану 34 с пропорциональным управлением. Подушка 30 для туловища представляет собой многокамерный блок (например, сдвоенные надувные камеры), содержащий перемежающиеся камеры для чередования камер с повышенным давлением воздуха в терапевтических целях. Каждая из двух отдельных камер присоединена быстроразъемным соединителем 44 к соответствующим клапанам 26 и 28. Ножная подушка 42 представляет собой многокамерный блок (например, сдвоенные надувные камеры), конструктивно решенный почти аналогично подушке 30 для туловища и содержащий две перемежающиеся камеры, которые отдельно присоединены быстроразъемными соединителями 44 к соответствующим им клапанам 38 и 40. Более подробное описание конкретной конструкции каждого из компонентов подушек предлагаемой системы приведено ниже.
Устройство управления давлением воздуха внутри головной подушки 36, подушки 30 для туловища и ножной подушки 42 более подробно описано в данном документе ниже, при этом оно составляет часть базовой конструкции, а также выполняет часть набора функций данного изобретения. Однако, как правило, эти три компонента подушек поддерживаются в надувном состоянии посредством электронного регулирования клапанов с пропорциональным управлением и/или регулированием скорости нагнетателя под управлением микропроцессоров или микроконтроллеров, которое включает выполняемые компьютером команды, например команды программы и/или алгоритмы, которые учитывают давления накачивания воздухом с терапевтическими целями и режимы в дополнение к тому, что они соединены друг с другом цифровой сетью передачи сигналов.
В различных вариантах выполнения может быть предусмотрен третий воздуховод. В вариантах выполнения, содержащих третий воздуховод, аналогичный воздуховоду в варианте выполнения, показанном на фиг.3, данный воздуховод выходит из распределительного блока 22 для обеспечения прохождения потока воздуха к остальным баллонам, связанным с предлагаемой системой матраса. Воздуховод 46 разделен на два воздуховода 48 и 50. Воздуховод 48 проходит к распределительному клапану 52 с пошаговым управлением, который попеременно накачивает и откачивает поворачивающиеся баллоны 54 и 56. Распределительный клапан 52 приводится в действие шаговым двигателем 51. Распределение воздуха осуществляется от распределительного клапана 52 через два воздуховода 58 и 60, которые проходят через стравливающий блок 62 для СЛР (сердечно-легочной реанимации) с ручным управлением, отслеживаемый переключателем 61 для СЛР. Каждый из воздуховодов 58 и 60 содержит датчики 64 и 66 давления и быстроразъемные соединители 44 на линии прохождения данных воздуховодов к соответствующим баллонам 54 и 56. Накачивание баллонов 54 и 56, в общем, достигается в режиме чередования с управлением от распределительного клапана 52 так, чтобы накачивать один баллон и откачивать второй баллон с обеспечением поворота пациента с одной стороны на другую. Расположение поворачивающихся баллонов вдоль длины системы матраса, как будет рассмотрено более подробно ниже, обеспечивает возможность выполнения данного поворота.
Обратимся снова к фиг.1. В различных вариантах выполнения воздуховод 50, проходящий от распределительного блока 22 посредством воздуховода 46, может проходить через активизирующий электромагнитный клапан 68, а затем через стравливающий блок 62 для СЛР. От стравливающего блока 62 для СЛР воздуховод 50 проходит через датчик 70 давления и через быстроразъемный соединитель 44, прежде чем будет наконец выполнять функцию накачки баллонов 72 ССМ (системы сменного матраса). Баллоны 72 ССМ выполнены с вентиляционным выходом в атмосферу посредством электромагнитного клапана 74. В различных вариантах выполнения возможно использование пенопластовой подушки или матраса, а также возможна замена баллонов 72 ССМ и связанных с ними компонентов. В подобных вариантах выполнения возможна замена таких компонентов как, например, воздуховод 50.
Вышеописанный нагнетательный блок 10, по существу, объединен с интерфейсным блоком пользователя, установленным на подножке кровати, на которой расположена предлагаемая система матраса. В этом блоке содержатся некоторые электронные схемы, связанные с программированием и работой данной системы, например узлы сети контроллеров (СК) и другие схемные элементы. Обратимся теперь к фиг.2 для получения общего представления о компонентах управления, связанных с предлагаемой системой, и продублированных частично в описании вышеприведенной пневматической схемы в соответствии с фиг.1. На фиг.2 блок 10 также содержит нагнетательный вентилятор 12, который в конечном счете (хотя на этой схеме не показаны от начала до конца другие соединители коллектора) служит для накачки левого поворачивающегося баллона 54, правого поворачивающегося баллона 56, ножной подушки 42, подушки 30 для туловища, головной подушки 36 и баллона 72 ССМ. Электрические соединения, показанные в блоке 10, обеспечивают электроэнергию, необходимую для запуска нагревателя 18, который служит для нагрева воздуха после его выхода из нагнетательного вентилятора 12, а также содержат соединения к устройству 101 ввода/вывода данных, например интерфейсу данных пользователя (ИДП), графическому интерфейсу пользователя (ГИП), среди прочих, которые в предпочтительном варианте выполнения содержат ЖК-дисплей с функцией сенсорного экрана. Иными словами, электрические/электронные соединения от интерфейса 100 пользователя показаны как содержащие соединение 102 питания и соединение 104 передачи данных. Как указано выше, эти электрические/электронные соединения проведены через тот же вышеупомянутый блок 20 шлангового соединителя и тем самым образуют электрическое/электронное соединение, проходящее от нагнетательного блока к сборной конструкции матраса.
Сборная конструкция 105 матраса содержит контроллер 106 матраса, который получает как питание, так и сигналы каналов передачи данных от интерфейса 100 пользователя. Те же линии питания и передачи данных, в свою очередь, переключаются к контроллерам клапанов с пошаговым управлением, которые связанны с каждым из трех компонентов подушек предлагаемой системы матраса. Эти контроллеры определены как «узлы сети» и содержат контроллер 108 клапана с пошаговым управлением (связанный с ножной подушкой 42), контроллер 110 клапана с пошаговым управлением (связанный с подушкой 30 для туловища), контроллер 112 клапана с пошаговым управлением (связанный с головной подушкой 36). Каждый из этих контроллеров клапанов с пошаговым управлением непосредственно подсоединен как к приемникам инфракрасного излучения, связанным с подушкой, к которой он прикреплен, так и к регулирующим клапанам, которые управляют накачкой этой подушки. Например, контроллер 108 клапана с пошаговым управлением принимает сигнал от приемника 114 инфракрасного излучения, при этом регулирующие клапаны 38 и 49 обеспечивают соответствующую накачку ножной подушки 42. Подобным образом контроллер 110 клапана с пошаговым управлением связан с приемниками 116, 118, 120 и 122 инфракрасного излучения, так же как и регулирующие клапаны 26 и 28, каждый из которых связан с подушкой 30 для туловища. И, наконец, контроллер 112 клапана с пошаговым управлением связан с приемником 124 инфракрасного излучения и регулирующим клапаном 34, каждый из которых связан с головной подушкой 36. Сетевая структура этой цепи контроллеров допускает добавление дополнительных контроллеров у соединителя 113, который может быть расположен в различных местах, включая контроллеры 108, 110 и 112 клапанов с пошаговым управлением, если это потребуется для других вариантов конструкций подушек и выполняемых функций.
Далее в соответствии с фиг.2 управление как левым поворачивающимся баллоном 54, так и правым поворачивающимся баллоном 56 выполняет контроллер 106 матраса посредством программируемой работы распределительного клапана 52, показанного штриховым элементом на фиг.2. Подобным образом управление накачиванием баллона 72 ССМ выполняется посредством программируемой работы фиксирующего электромагнитного клапана 68 и вентиляционного электромагнитного клапана 74 ССМ. В предпочтительном варианте выполнения накачивание баллона ССМ можно регулировать для обеспечения устойчивости всей системы матраса, в то время как поворачивающиеся баллоны, естественно, могут быть отрегулированы для достижения вышеописанной функции поворота. Как было изложено выше, в некоторых вариантах выполнения возможно использование типа подушки или матраса из пенопласта, следовательно, в подобных вариантах выполнения контроллер матраса не будет использоваться для управления матрасом из пенопласта.
В различных вариантах выполнения контроллер матраса может содержать ряд других конструкций. Например, контроллер матраса может содержать вентиляционный электромагнитный клапан ССМ в вариантах выполнения, в которых используется вышерассмотренный баллон ССМ. Обратимся теперь к фиг.3, которая иллюстрирует более подробно сеть контроллеров промежуточного слоя управления предлагаемой системы матраса. Показано, что контроллер 106 матраса имеет подключения прямого регулирования к распределительному клапану 52 с пошаговым управлением, связанному с поворачивающимися баллонами, а также к вентиляционному электромагнитному клапану 74 ССМ и фиксирующему электромагнитному клапану 68 ССМ. Аналогично контроллер матраса 106 обеспечивает подачу питания (и излучения) к каждому из передатчиков инфракрасного излучения (в предпочтительном варианте выполнения 6 передатчиков) 130, 132, 134, 136, 138 и 140. Эти ИК передатчики в предпочтительном варианте выполнения представляют собой ИК светодиоды (СИД), которые согласованно приводятся в действие при указанной частоте сигнала 3 кГц. Возможно использование и других частот. Подобным образом контроллер 106 матраса принимает данные входного сигнала от входа 142 датчиков угла, входа 144 датчиков температур и входа 146 датчиков положений боковых направляющих. Управляемый вручную переключатель 148 для СЛР связан с вышеописанным стравливающим блоком 62 для СЛР. Входное по давлению соединение 150 получает измерения давлений продуваемого воздуха от вышеупомянутого манометра 16.
В различных вариантах выполнения контроллер 106 матраса образует основной сетевой узел для сетевого соединения 152, которое содержит сетевые линии передачи и приема сигналов, а также линии напряжения питания и линии обратной связи. Это сетевое соединение 152 распределено к каждому из контроллеров клапана с пошаговым управлением в виде узлов 108, 110 и 112 сети. Эти микроконтроллеры, снова выполняя роль узлов локальной сети, отдельно принимают входные данные от ИК приемников 114, 116, 118, 120, 122 и 124, связанных соответственно с ножной подушкой 42, подушкой 30 для туловища и головной подушкой 36. В свою очередь, каждый из этих контроллеров управляет и контролирует шаговые двигатели, подсоединенные к вышеупомянутым распределителям с пропорциональным управлением. Эти шаговые двигатели содержат шаговый двигатель 126, связанный с регулирующим клапаном 40 ножной подушки 42, шаговый двигатель 128, связанный с регулирующим клапаном 38 ножной подушки 42, шаговый двигатель 130, связанный с регулирующим клапаном 28 подушки 30 для туловища, шаговый двигатель 132, связанный с регулирующим клапаном 26 подушки 30 для туловища, и, наконец, шаговый двигатель 134, связанный с регулирующим клапаном 34 головной подушки 36.
Каждый из контроллеров 108, 110 и 112 клапанов с пошаговым управлением является программируемым контроллером, который выполнен с возможностью независимого поддержания надлежащей накачки соответствующих им подушек, без использования сетевого соединения с контроллером 106 матраса или обратного соединения с интерфейсным блоком 100 пользователя. Каждый контроллер клапанов с пошаговым управлением выполняет функцию узла сети в соответствии с протоколом СК (сети котроллеров), как будет более подробно описано ниже. Эта структура сети служит для улучшения работы данной системы в целом и обеспечивает поддержание с высокой эффективностью соответствующей накачки компонентов системы матраса даже в ответ на перемещение пациента, которое в противном случае может привести к «касанию дна» через подушки матраса. Каждому из микроконтроллеров в описанном предпочтительном варианте выполнения данного изобретения может соответствовать микроконтроллер ИС типа Н8/3687 N или эквивалентный ему.
В различных вариантах выполнения сетевая структура может содержать различные узлы СК, конфигурации и протоколы. В некоторых вариантах выполнения каждый из контроллеров клапанов с пошаговым управлением и другие котроллеры (например, контроллер матраса и различные контроллеры клапанов, среди прочих) могут быть однозначно идентифицированы как узлы сети индикаторными адресными джамперами. В других вариантах выполнения узлы СК могут быть соединены в определенном порядке с присвоением адреса в определенном порядке. Например, в одном варианте выполнения узлы СК могут быть соединены в следующем порядке: ГИП - Графический Интерфейс Пользователя (Супервизор Сети), Контроллер Нагнетателя (КН), Контроллер Матраса (КМ), Контроллер Ножного Клапана (КНК), Контроллер Клапана для Туловища (ККТ), Контроллер Головного Клапана (КГК). Специалист должен понимать, что данные различные контроллеры могут содержать аналогичные контроллеры с такими же или подобными функциями. Например, контроллер нагнетателя может содержать любой контроллер, который управляет скоростью потока воздуха от нагнетателя, вентилятора или другого источника нагнетаемой текучей среды. В различных вариантах выполнения динамический перевод адреса может начинаться с широковещательного сообщения, рассылаемого по сети узлом ГИП, требования ко всем узлам подготовки к динамическому переводу адреса. Когда узел получает это сообщение, он отвечает сообщением об идентификации узла, причем идентификационный номер присвоен каждому типу платы. Например, в различных вариантах выполнения узел КН может иметь идентификационный номер 1, узел КМ может иметь идентификационный номер 2, а узел КК может иметь идентификационный номер 3. Узел ГПИ присваивает адрес сети каждому узлу, которому возвращает идентификационный номер. В некоторых вариантах выполнения с процедурой динамического перевода адреса может быть использована последовательность включения питания. Например, в некоторых вариантах выполнения, когда начинается динамический перевод адреса, питание подается к узлам ГПИ, КН, КМ и КНК. После запитывания узлов КН, КМ и КНК и присвоения им адреса узел КНК переключает питание к узлу ККТ, который является единственным узлом контроллера клапана (КК) в сети, не имеющим адреса. ГПИ будет способен дифференцировать его от других узлов КК. После того, как узел КНК получает адрес, он переключает питание к узлу КГК и теперь только он является узлом КК в сети без адреса. После того как узел КНК получает адрес, сеть готова для нормальной работы.
Фиг.4 дает более детальное представление о контроллере 106 матраса, показывая микроконтроллер и его соединение к различным входам и выходам, связанным с контроллером. В состав входов О/G включены соединения 148 переключателя для СЛР, соединение 142 датчика угла, соединение 144 датчика температуры, соединение 150 манометра и входы 146 датчиков боковых направляющих. Схема контроллера матраса, показанная на фиг.4, также содержит регулятор 160 напряжения для электроснабжения микроконтроллера и каждого из вспомогательных компонентов.
Выходы микроконтроллера 106 содержат сигнал с частотой 3 кГц от задающего устройства, который, как описано выше, согласованно осуществляет питание и управление передатчиками инфракрасного излучения. Данные микроконтроллеры также содержат выходные сигналы для управления приводами 164 и 166 электромагнитных клапанов, которые управляют соответственно вентиляционным и фиксирующим электромагнитным клапанами ССМ. И, наконец, микроконтроллер 106 управляет приводом 168 шагового двигателя, распределительным клапаном с пошаговым управлением, который осуществляет накачку и откачку поворачивающихся баллонов. Как было указано выше, микроконтроллер 106 подсоединен с формированием узла СК, а блок контроллера матраса обслуживает схему 170 сетевого протокола СК и схему 172 приемопередатчика СК.
В различных вариантах выполнения контроллер с пошаговым управлением может содержать ряд различных конфигураций. Например, в некоторых вариантах выполнения контроллер с пошаговым управлением может содержать одну или более схем пошагового привода. В других вариантах выполнения контроллер с пошаговым управлением может содержать схемы, предназначенные для фильтрации, буферизации и усиления. В некоторых вариантах выполнения контроллера с пошаговым управлением могут быть включены или изъяты схемы, которые могут строиться на одной или более желаемых функциях, извлекаемых из контроллера. В варианте выполнения, проиллюстрированном на фиг.3, выполнена рабочая схема типичного контроллера клапана с пошаговым управлением. Эта схема иллюстрирует типичный пример одного из трех контроллеров клапана с пошаговым управлением, связанных с каждой из трех подушек в предпочтительном варианте выполнения предлагаемой системы матраса. Контроллер 110 клапана с пошаговым управлением, связанный с подушкой для туловища, в этом примере показан как использующий четыре сигнала входных данных от четырех ИК датчиков. Показано, что входные данные, поступающие к микроконтроллеру 110, содержат буферизованные и прошедшие фильтрацию входные данные от каждого из датчиков инфракрасного излучения. Буферные/фильтрационные схемы 180, 182, 184 и 186 приводят в надлежащее состояние сигналы от отдельных устройств ИК датчиков для соответствующего отслеживания данным микроконтроллером. Подобным образом контроллер клапана с пошаговым управлением содержит регулятор 202 напряжения для электропитания компонентов в схеме контроллера.
Выходные сигналы микроконтроллера 110 (как в каждом контроллере клапана с пошаговым управлением) содержат выходные сигналы для схем 188 и 190 пошаговых приводов двух клапанов с пропорциональным управлением под контролем отдельного контроллера клапана с пошаговым управлением. Работа этих приводов достигается посредством системы 192 и 194 отслеживания тока, которая обеспечивает возможность непосредственной обратной связи микроконтроллера в режиме или состоянии двух клапанов с пропорциональным управлением. Как указано выше, каждый микроконтроллер имеет схему 196 адресной конфигурации, установленную для отделения его от других узлов контроллеров в сети. Каждая схема микроконтроллера подобным образом содержит схему 198 протокола СК и схему 200 приемопередатчика СК для передачи данных по сети.
СК (Сеть Контроллера) представляет собой систему последовательных шин, которая изначально была разработана для использования в автомобильной сфере в начале 1980-х годов. В 1993 году СК протокол был стандартизован на международном уровне как стандарт IS011898-1 и содержит канальный уровень на основе семиуровневой модели ISO/OSI. СК, которая в настоящее время поступает от большого количества производителей полупроводниковых приборов в виде аппаратных средств, обеспечивает две службы связи - отсылку сообщения (передачу кадра данных) и запрос сообщения (запрос дистанционной передачи, ЗДП). Все другие службы, такие как передача сигналов ошибки и автоматическая ретрансляция недостоверных кадров, являются прозрачными для пользователя, то есть схема СК будет автоматически выполнять эти обслуживания без необходимости в специальном программировании.
Контроллер СК можно сравнить с принтером или печатающим устройством, при этом направления использования СК, такие как в данной заявке, еще должны определять язык/грамматику и слова/словарь, обеспечивающие передачу данных. Однако СК фактически обеспечивает многокомандную иерархию, которая допускает построение интеллектуальных и избыточных систем, что, как упомянуто выше, особенно важно при выполнении задач поддержания накачки по данному изобретению. Если один узел сети поврежден, данная сеть еще способна работать. СК также обеспечивает широковещательную передачу данных, в которой отправитель информации одновременно может осуществлять передачу ко всем устройствам на шине. Таким образом, программирование посредством интерфейса пользователя по данному изобретению может быть распределено к каждому из узлов контроллеров СК способом, который может создавать чередующиеся режимы по всей системе. При этом все принимающие устройства считывают данное сообщение, а затем принимают решение, относится это сообщение к нему или нет. Такое построение обеспечивает целостность данных, так как все устройства в системе используют одну и ту же информацию. СК также обеспечивает механизмы определения сложных ошибок и ретрансляцию сбойных сообщений.
Обратимся теперь к фиг.6 и 7 для описания физического размещения различных управляющих компонентов, указанных и рассмотренных выше. Фиг.6 и 7 показывают соответственно в аксонометрическом виде и на виде сверху нижнюю сторону промежуточного слоя компонентов управления, который введен в предлагаемую систему матраса. Эти виды отображают положения указанных компонентов, если смотреть на перевернутую систему матраса, при этом баллон ССМ и поворачивающиеся баллоны удалены (вся эта конструкция более подробно описана ниже со ссылкой на фиг.15). Промежуточный слой контроллеров, по существу, выполнен из чехла 210 с гибкими стенками, окружающего центральную часть 212 из пенопласта, внутри которой размещены различные управляющие компоненты по данному изобретению. Показано расположение контроллера 106 матраса, а также расположение контроллеров 108, 110 и 112 с пошаговым управлением. Контроллеры клапанов с пошаговым управлением позиционированы в непосредственной близости от того компонента подушки, на который они конкретно реагируют. Показаны все, за исключением одного, ИК передатчики в проектных положениях, при этом они совместно соединены. На фиг.6 и 7 ИК передатчики 132, 134, 136, 138 и 140 показаны в проектном положении. ИК передатчик 130 удален, чтобы показать размещение окна 131 ИК передатчика, местоположение которого определено для установки данного передатчика на одной стороне контроллера 106.
На противоположной стороне промежуточного слоя компонентов управления имеются ИК датчики или более точно на фиг.6 и 7 показаны окна ИК датчиков в отдельных подушках, как более подробно будет рассмотрено ниже. На фиг.6 и 7 показаны окна 115, 117, 119, 121, 123 и 125, которые расположены совместно с соответствующими компонентами подушек для головы, ног и туловища. Кроме того, совместно с соответствующими компонентами подушек выполнены впускные соединители 214 для потока воздуха (связанные с головной подушкой), соединители 216 и 218 (связанные с подушкой для туловища) и соединители 220 и 222 (связанные с ножной подушкой). Показанный коллектор 22 расположен так, что в него может вставляться шланг (не показан), предназначенный для одного большого потока воздуха, с обеспечением разделения и распределения данного потока к трем меньшим воздуховодам для последующего распределения к подушкам и компонентам матраса. На фиг.6 и 7 для ясности все воздуховоды не показаны. От коллектора 22 отходят два воздуховода, которые соединены с контроллерами 108, 110 и 112 клапанов с пошаговым управлением, для обеспечения прохождения необходимого потока воздуха в подушки матраса. Третий воздуховод соединяет коллектор 22 с контроллером 106, при этом необходимый поток воздуха поступает к поворачивающимся баллонам и основному баллону ССМ, как изложено выше.
Для ясности на фиг.6 и 7 также не показана наибольшая часть электрических/электронных соединений между различными управляющими компонентами. Исключение составляет 2-проводное соединение, которое связывает вместе ИК передатчики по одному краю промежуточного слоя. При нормальной работе шестой ИК передатчик 130 расположен поверх окна 131 и, как показано, также присоединен к 2-проводной цепи. Как изложено выше со ссылкой на фиг.2, между данными компонентами имеются дополнительные электрические/электронные соединения. Кроме того, как показано и описано в соответствии с фиг.3-5, имеются кабельные сетевые соединения между корпусами контроллеров.
Обратимся теперь к фиг.8 для краткого описания контроллера 106 матраса и его корпуса. Внутри контроллера корпуса матраса расположены различные электронные и электромеханические элементы управления. Источником потока воздуха является воздуховод 46, который питает воздуховод 48 и 50. Воздуховод 48 обеспечивает прохождение потока воздуха к распределительному клапану 52, который приводится в действие шаговым двигателем 51. Такое решение обеспечивает прохождение необходимого потока воздуха к поворачивающимся баллонам через штуцеры 58 и 60 воздуховодов.
Воздуховод 50 обеспечивает прохождение потока воздуха к электромагнитному клапану 68, который, в свою очередь, направляет поток воздуха наружу из корпуса к баллону ССМ и к вентиляционному выходу через электромагнитный клапан 74. Каждый из электромагнитных клапанов 68 и 74, а также распределительный клапан 52 электрически подсоединен к печатной плате 230, на которой выполнена вышеупомянутая схема контроллера (контроллера матраса). Подобным образом на печатной плате 230 расположен микроконтроллер ИС, который образует основу данного контроллера в целом. Вышерассмотренные и, в общем, не показанные для ясности на фиг.8 электрические/электронные соединения входят в корпус через порты, некоторые из которых могут быть водонепроницаемыми, показаны на сторонах корпуса. Крышка (не показана) дополняет корпус, окруженный стенками, для герметизации от проникновения текучих сред.
Обратимся теперь к фиг.9 для краткого описания типичного примера контроллеров клапана с пошаговым управлением, которые работают совместно с контроллером матраса и обеспечивают регулирование прохождения потока воздуха к подушкам матраса, как изложено выше. На фиг.9 в качестве примера показан контроллер 110 клапана с пошаговым управлением, который обеспечивает создание необходимых условий для подушки 30 данной системы для туловища. Следует понимать, что остальные два контроллера клапана с пошаговым управлением будут либо аналогичными по конструкции либо будут содержать половину рабочих компонентов показанного примера. На этом виде показаны клапаны 26 и 28 с пропорциональным управлением, приводимые в действие шаговым двигателем. На одной стороне корпуса показан источник потока воздуха к данному узлу у надписи «от 22», обозначающий тот источник, который берет начало в коллекторе 22. Выходящий из регулирующих клапанов поток воздуха направляется к подушке 30 для туловища через указанные соединители, расположенные на противолежащих сторонах корпуса. Каждый из регулирующих клапанов 26 и 28 электрически подсоединен к печатной плате 240, на которой выполнена схема контроллера. И снова в данном случае электрические/электронные соединения (провода) как внутри корпуса, так и входящие в корпус и выходящие из него для ясности не показаны. Управление работой клапанов включает контроль степени открытия и закрытия клапанов для снижения их общего шума, связанного с работой данной системы. Кроме того, управление шаговыми двигателями включает регулирование тока с целью проверки ошибок управляющего сигнала. Печатные платы в трех корпусах контроллеров клапанов с пошаговым управлением, по существу, одинаковые, а в сети они распознаются после динамической передачи адреса во время инсталляции. Благодаря распределенной структуре обработки данных сети этой системы можно подключать питание и активизировать отдельные узлы/контроллеры данной системы в последовательном режиме. Это обстоятельство значительно облегчает как начальный ввод в действие, так и последующее обслуживание данной системы. Диагностический режим работы также способствует этим аспектам распределенной сети.
Обратимся теперь к фиг.10-13 для описания конструкции и конфигурации подушек, связанных с предложенной системой сменного матраса. Как выше показано на фиг.1, подушка для туловища, в общем, выполнена с двумя перемежающимися камерами с обеспечением прохождения в подушку воздушного потока с переменной пульсацией, как, например, известное в терапии использование для лежачих пациентов. Эти камеры выполнены, в общем, в виде каналов коробчатой формы, которые проходят параллельно поперек подушки. На фиг.10A показан вид сверху подушки 30 для туловища, на которой тканевые швы определяют конфигурацию перемежающихся каналов. На фиг.10В показаны впускные соединители 216 и 218 для воздушного потока (вид подушки снизу), которые совмещаются с подсоединением к соответствующим им штуцерам на рассмотренном выше промежуточном слое компонентов управления.
Конструкция подушки 30 для туловища выполнена из любой ткани из ряда различных тканей с высокой и/или низкой потерей воздуха, которые обеспечивают «выход» воздушного потока для надувной системы, широко известный в данной области техники. Конструкцию такой подушки обычно выполняют стачиванием с изнанки, а затем выворачивают на лицо через первоначально открытую часть шва (показано на фиг.10A). Подушки матраса по данному изобретению могут быть сшиты или вышеописанным способом или соединены способом ВЧ сварки (высокая частота), известным в данной области техники. Готовую подушку удерживают на месте в системе сменного матраса посредством прикрепления показанных застежек-молний (или аналогичных средств прикрепления) к их соответствующим компонентам (или аналогичным средствам прикрепления), расположенным на материале-чехле системы сменного матраса.
На фиг.11А и 11В показана конструкция ножной подушки 42, которая, как и подушка 30 для туловища, выполнена из двух перемежающихся камер. На фиг.11В (вид подушки снизу) показаны штуцеры 220 и 222 для воздушного потока. Способы выполнения подушки 42 аналогичны вышеописанным способам выполнения подушки 30 для туловища.
На фиг.12А и 12В показана конструкция головной подушки 36, которая отличается от конструкции подушки 30 для туловища и ножной подушки 42. Головная подушка 36 не предназначена для целей терапевтического воздействия нагнетанием перемежающихся камер и поэтому выполнена из одной камеры с одним впускным штуцером 214 для воздушного потока, который показан на фиг.12В (вид подушки снизу). Как показано на фиг.12А, параллельные «каналы» по-прежнему соединены швом или иным образом объединены в подушку для поддержания ее плоской конфигурации, однако внутренний поток воздуха между этими «каналами» выполнен для создания в результате камеры с единой внутренней частью.
Обратимся теперь к фиг.13 для краткого описания одного способа создания конструкции внутренней части подушки, в котором отражающие ИК поверхности объединяются с подушкой для содействия измерению ИК облучения посредством ИК датчиков. В этом примере конструкции подушка 250 выполнена из тканевой коробки-оболочки 256, а верхняя поверхность 252 в этом покомпонентном виде для ясности показана отдельно. Важным отличительным свойством этой конструкции является размещение ИК отражающих поверхностей 254а, 254b и 254 с (разновидности которых известны в данной области техники) на особых внутренних сторонах коробчатых каналов, выполненных внутри данной подушки. При этом способе отдельные участки подушки фокусируют ИК облучение (тем самым позволяя данной системе лучше идентифицировать участок подушки, который может потребовать большей накачки) и помогают предотвратить «взаимную помеху» между облучаемыми ИК секциями данной подушки. Эти свойства вместе со способом синхронизированного опроса ИК датчиков, рассмотренных более подробно в дальнейшем, служат для более точного указания участка подушки, для которого может потребоваться изменение давления накачки. Несмотря на то, что конструкция камеры подушки 250, показанной на фиг.13, несколько отличается от конструкции камеры, показанной на фиг.10-12, принцип использования ИК отражающих поверхностей, стратегически размещенных на внутренних стенках каналов в форме коробок, является легкоприспособляемым.
Фиг.14 представляет собой детальный вид сверху показательного устройства ИК передатчика/датчика предлагаемой системы. Целью такого конструктивного решения ИК устройства является создание единой конструкции, которая может быть сконфигурирована для выполнения функции либо ИК передатчика либо ИК датчика. Используемый в качестве примера, проиллюстрированного на фиг.14, ИК передатчик 134 показан расположенным поверх окна 135 в материале 210 чехла промежуточного слоя компонентов управления. Передатчик 134 помещен в карман 260, выполненный из гибкого листового полимерного материала (например, из полиуретана), который может быть пришит или прикреплен сваркой к материалу чехла промежуточного слоя. Карман 260 выполнен с размерами, которые позволяют как удерживать, так и определять местоположение ИК передатчика 134. Поперек отверстия кармана 260 расположен материал 262 крышки для удержания данного устройства внутри кармана. Нет необходимости в выполнении крышки 262 водонепроницаемой, поскольку конструкция собственно ИК передатчика в предпочтительном варианте, по существу, выполнена с водонепроницаемой оболочкой. Одним из подходящих типов материала для закрывающего средства 262 может быть материал с крючками и петлями.
ИК передатчик/датчик 134 может иметь жесткую оболочку из пластмассы, выполненную литьем под давлением, которая содержит по меньшей мере одну сторону, прозрачную для ИК облучения, которое направлено в соответствующую камеру подушки. Внутри жесткой оболочки из пластмассы расположена печатная плата 272, на которой размещены ИК СИД 274 и/или ИК датчик 276. На рынке имеется ряд источников ИК облучения (в типичном случае приборы на твердотельных СИД), которые подходят для использования в предлагаемой системе. Схемы, связанные с ИК датчиками, которые используются в предпочтительном варианте, выполнены для обеспечения работы датчиков в линейной области их выходного сигнала (в типичном случае в области насыщения), при этом они содержат автоподстройку по усилению для введения датчика в режим работы в линейной области. Таким способом достигается более точная и направленная корреляция уровней облучения и выходного сигнала датчика. Этот подход является особенно важным для более маленьких отслеживаемых смещений камер подушек матрасов (более маленьких изменений в уровне облучения), которые при предыдущих подходах могли быть упущены.
Кроме того, в предпочтительном варианте выполнения по данному изобретению используются оптические фильтры, обеспечивающие сужение принимаемой и отслеживаемой полосы ИК частот.
Несмотря на то, что схемы системы, управляющие вышеупомянутыми ИК передатчиками, управляют данными устройствами во взаимодействии, возможно использование альтернативного подхода управления передатчиками и опроса соответствующих датчиков в группе устройств так, чтобы дополнительно избежать влияний «взаимной помехи» между камерами. Уход от одновременного опроса пар датчик/передатчик, которые направлены к смежным камерам, в то же самое время будет содействовать уменьшению или исключению подобной взаимной помехи (излучение от одного передатчика, которое перехватывается датчиком от другой пары передатчик/датчик).
Обратимся теперь к фиг.15 для описания способа, в котором предложенная система использует измерение ИК излучения внутри надувной камеры для определения условия, при котором уменьшение высоты камеры служит основанием для увеличения давления накачки этой камеры, обеспечивающего восстановление ее высоты. Фиг.15 также иллюстрирует послойное расположение компонентов баллонов предложенной системы. Предполагается, что систему сменного матраса размещают на существующих конструкциях больничных кроватей и им подобных, хотя принципы ее работы могут быть быстро приспособлены и к новым конструкциям выпускаемого оборудования. Для обеспечения режима замены в данной системе баллон 72 ССМ частично окружен чехлом 210. Поворачивающиеся баллоны 54 и 56 подобным образом заключены в чехол 210 и в предпочтительном варианте выполнения дополнительно помещены и удерживаются внутри промежуточных чехлов, объединенных с чехлом 210. Внутри чехла 210 при необходимости могут быть созданы различные отделения и промежуточные чехлы для размещения и удержания различных баллонов, управляющих компонентов, кабелей и воздуховодов. Эти отделения могут быть сшиты или соединены вместе сваркой, или конструктивно могут быть выполнены с участками материала, которые прикрепляют с возможностью съема застежками-молниями или прикрепляющими поверхностями с крючками и петлями. Также для размещения и удержания различных компонентов данной системы на месте могут быть использованы пришитые к чехлам ремни, которые закрепляют пряжками и затяжками.
Промежуточный слой с компонентами управления данной системы дополнительно показан на фиг.5 в виде поперечного разреза, по существу, поперек кровати через центр системы матраса. В этом размещении подушка 30 для туловища показана с ИК передатчиком 134, расположенным на одной стороне подушки, и ИК датчиком 118, расположенным на противоположной стороне. Показан контроллер 106 матраса (который поддерживает схему управления ИК передатчиками), а также контроллер 108 клапана с пошаговым управлением (который отвечает за накачку подушки 30 для туловища). На этом виде также показан в разрезе центральный материал 212 промежуточного слоя из пенопласта. Пунктирной линией показаны внешние компоненты данной системы, а именно нагнетательный блок 10 с дисплеем 101 и основной воздуховод 280, в их размещении на кровати во взаимодействии с системой сменного матраса.
Работа системы ИК датчика построена на измерении уровня облучения внутри камеры в отличие от простого прерывания линии нацеленного луча ИК излучения. Таким образом, ИК передатчик и ИК датчик ориентированы не с направлением один на другой, а направлены в камеру в целом. Траектории луча, показанные на фиг.16 внутри подушки 30 (внутри одного или более пересекающего кровать канала коробчатой формы подушки 30), дают представление о направлении, дисперсии и внутреннем отражении ИК излучения внутри камеры, а также его конечном поступлении к ИК датчику. Из данного чертежа можно видеть, как даже небольшие изменения верхней плоской поверхности подушки будут приводить к уменьшению уровня облучения, принимаемого датчиком. Значительные изменения данной плоской поверхности, такие, которые могут возникнуть при прямом воздействии локтя или другого сфокусированного давления на наружную поверхность подушки, будут приводить к более значительному изменению общего уровня облучения, принимаемого датчиком. При этом способе может быть достигнуто более точное определение степени смещения поверхности и опасности «начала касания дна». Таким образом, вышеописанные контроллеры и их прямое подключение к группе ИК датчиков, а также их непосредственное подсоединение к клапанам накачки воздуха выполнены с конфигурацией, которая обеспечивает более быстрое и соответствующее реагирование при необходимости увеличения (или уменьшения) давлений накачки в любом определенном участке системы матраса.
В заключение обратимся к фиг.16 для краткого описания способа, в котором предлагаемая система может быть расположена на стандартной больничной кровати или ей подобной. На этом виде кровать 290 выполнена с панелью 284 подножки, на которой размещен и позиционирован нагнетательный блок 10. Система 282 сменного матраса показана расположенной на кровати 290 почти так же, как может быть расположен стандартный матрас. Держатель 286 представляет собой жесткую панель, присоединенную к блоку 10 с возможностью регулирования, который позволяет удерживать и прикреплять нагнетательный блок к панели 284 подножки. Блок 10 содержит эргономическую рукоятку 288 для облегчения его размещения на кровати и снятия с нее. Основной воздуховод присоединяет блок 10 к коллектору 22 (на этом чертеже не показан), связанному с промежуточным слоем системы 282 матраса. Как упоминалось выше, необходимые электрические/электронные кабели и соединения между нагнетательным блоком и промежуточным слоем компонентов управления введены в конструкцию основного воздуховода так, чтобы исключить необходимость дополнительных соединений. В предпочтительном варианте выполнения воздуховод 280 содержит быстроразъемное соединение 281, которое позволяет быстро отделить нагнетательный блок от остальной части системы.
Шнур 292 электропитания обеспечивает необходимую мощность ПТ для приведения в действие всех электрических и электронных компонентов предлагаемой системы.
Кроме того, на фиг.16 показано беспроводное устройство 296 передачи данных, которое может быть выполнено для связи с использованием сигналов ВЧ непосредственной близости (малой мощности) с различными устройствами контроллеров, входящих в данную систему. Учитывая необходимость программирования в микроконтроллерах данной системы различных калибровок, режимов, установочных параметров и им подобных, полезно использовать подобные устройства передачи данных непосредственной близости в качестве средства для изменения установочных параметров различных контроллеров. Печатные платы, рассмотренные при описании корпуса контроллера, показанного на фиг.8 и 9, могут содержать необходимую схему приемопередатчика беспроводной связи, обеспечивающей обмен подобных данных посредством блока с ручным управлением непосредственной близости. Используемый в предпочтительном варианте выполнения данного изобретения сетевой протокол (СК протокол) может быть дополнительно использован совместно с беспроводной передачей данных посредством конфигурации блока с ручным управлением, как отдельно идентифицируемого узла сети. В этом случае блок с ручным управлением может служить для сброса параметров, запрограммированных в отдельных контроллерах, и/или может служить для приема и загрузки данных о работе контроллера за прошедший период, связанной с различными отслеживаемыми изменениями давления и температуры, а также измерениями смещений подушки, выполненных ИК датчиками.
Несмотря на то, что описание изобретения было выполнено исходя из вышеупомянутых предпочтительных вариантов выполнения, оно приведено только с пояснительной целью и не рассматривается как ограничительное толкование данного изобретения. Специалисты должны понимать, что модификации данного изобретения могут включать конкретные существующие опорные конструкции для пациентов или конфигурации больничных кроватей. Подобные модификации, касающиеся размера и даже конфигурации, где они просто совпадают с существующими конструкциями кроватей, не выходят за пределы сущности и объема правовой охраны данного изобретения.
Реферат
Изобретение относится к устройствам матрасов и касается системы и способа поддержания конфигурации надувного матраса. Внутри отдельной камеры или групп камер надувного матраса выполняется измерение уровней инфракрасного излучения. Распределенные микропроцессорные контроллеры, объединенные в сетевую конфигурацию, использующую сетевые протоколы контроллеров, уменьшают количество проводов и соединений, необходимых для системы в сборке. Для создания отдельных камер с использованием специальных типов полупрозрачных, прозрачных и отражающих ИК материалов применяются сшивание и/или ВЧ сварка. Выполнение подушек и баллонов включает использование различных типов тканей с требуемой степенью потери воздуха - от низкой до высокой. Также допускается использование блока с ручным управлением как для программирования системы, так и для загрузки информации о работе данного устройства. Индивидуальные конструктивные решения подушек, связанные с компонентами подушек матраса для головы, туловища и ног, выполнены специально для работы в соответствии с возможностями устройств управления. Изобретение позволяет поддерживать накачку надувного матраса на определенном уровне с целью создания комфорта пациенту. 3 н. и 3 з.п. ф-лы, 16 ил.
Формула
матрас, содержащий несколько надувных камер, содержащих головную секцию с первой надувной камерой; секцию для туловища со второй надувной камерой, перемежающейся с третьей надувной камерой; и ножную секцию с четвертой надувной камерой, перемежающейся с пятой надувной камерой, причем каждая указанная секция - головная, для туловища и ножная, имеет по меньшей мере один подсоединенный к ней регулирующий клапан,
передатчики, расположенные вблизи поверхности указанных надувных камер,
приемники, расположенные вблизи поверхности указанных надувных камер, и
сеть, содержащую ряд узлов сетевых контроллеров (СК), взаимодействующих друг с другом, а также с указанными передатчиками и приемниками, при этом
один из указанных передатчиков спарен с одним из указанных приемников, причем по меньшей мере одна пара связана по меньшей мере с одной надувной камерой, каждая пара выполнена с возможностью передачи и приема энергии излучения в конфигурации с дифференциацией времени работы, и эта конфигурация характеризуется тем, что в перемежающихся камерах каждая пара передает и принимает энергию излучения по существу в одно и то же время, так что в смежных камерах пары не передают и не получают энергию излучения по существу в одно и то же время.
передачу инфракрасного излучения в надувную камеру,
прием инфракрасного излучения, переданного из надувной камеры,
определение, имеется ли разность в интенсивности излучения между принятым инфракрасным излучением и динамическим порогом интенсивности излучения, причем данное определение выполняют частично с использованием сети контроллеров (СК), и
регулирование скорости потока воздуха в надувную камеру, если имеется указанная разность, при этом указанное регулирование выполняют частично с использованием сети контроллеров (СК).
надувную камеру, предназначенную для поддержания на ней пациента и имеющую отражающий внутренний участок и передающий излучение участок,
инфракрасный передатчик, расположенный вблизи передающего излучение участка,
инфракрасный приемник, расположенный вблизи передающего излучение участка, и
микроконтроллер, содержащий схему сети контроллеров (СК) и связанный с инфракрасным передатчиком и инфракрасным приемником.
Комментарии