Диван-кровать с облегченным открыванием, в частности с автоматическим приводом - RU2594877C2
Код документа: RU2594877C2
Чертежи














Описание
Настоящее изобретение относится к дивану-кровати с облегченным открыванием, в частности, с автоматическим приводом.
В настоящее время известно множество механических решений, которые позволяют трансформировать кресло или диван в кровать и наоборот. Цель этих механизмов - сделать такую трансформацию как можно проще и безопаснее.
В частности, известны механизмы, которые позволяют пользователю трансформировать диван или кресло в кровать простым и интуитивным образом. Такие механизмы обычно состоят из поддерживающего неподвижного каркаса, который образует отсек, где размещается подвижная часть механизма, когда он сложен в конфигурации дивана, и четыре взаимно шарнирно соединенные подвижные рамы, которые могут перемещаться между закрытой конфигурацией, т.е., конфигурацией дивана, в которой они образуют угол приблизительно 90° по отношению друг к другу, и открытой конфигурацией, т.е. конфигурацией кровати, когда они расположены под углом 180° по отношению друг к другу таким образом, что образуют несущую поверхность, на которой лежит матрац. Такой матрац при переходе в закрытую конфигурацию складывается в несколько частей при помощи подвижных рам и переносится внутрь отсека, образованного неподвижным каркасом.
Кроме того, жесткие конструкции дивана, такие как подлокотники и передняя и задняя покрывающие вертикальные панели, могут насаживаться на неподвижный каркас. Подушки сиденья дивана, напротив, помещаются непосредственно на последнюю подвижную раму, но со стороны, противоположной матрацу, или в любом случае всегда в том же положении, но на вторичной раме, перемещаемой механизмом. И наконец, подушки спинки крепятся с помощью кронштейна к указанному механизму.
С кинематической точки зрения относительные перемещения между несколькими рамами, кронштейнами и вторичными рамами управляются соответствующими синхронизирующими механизмами, которые взаимно соединены так, что степень свободы всей системы единственная. Другими словами, чтобы перейти из закрытой конфигурации к открытой конфигурации и наоборот, пользователь должен выполнить одну единственную операцию, так как механизм удобно синхронизирует перемещение каждой подвижной рамы таким образом, что в начале и в конце есть открытая и закрытая конфигурации, приведенные выше.
Следует уточнить, что в закрытой конфигурации матрац складывается внутри неподвижной конструкции, тогда как подушки сиденья и спинки располагаются под соответствующими углами поверх подвижных рам.
Наоборот, в открытой конфигурации матрац раскладывается на подвижных рамах, образующих опорную поверхность, а подушки сиденья и спинки располагаются напротив друг друга под опорной поверхностью.
Такое размещение дает возможность пользователю трансформировать диван в кровать в комплекте с матрацем, выполняя одно единственное движение, и без необходимости убирать подушки сиденья и спинки с их исходной позиции.
Чтобы трансформировать диван в кровать, по существу, пользователь, находясь перед диваном, тянет к себе подушки спинки, которые расположатся напротив подушек сиденья. Одновременно с этим подвижные рамы начнут выходить из неподвижного каркаса, так что пользователь может захватить конец последней рамы и продолжить вытягивание. На последнем этапе пользователь поддерживает конец кровати до полного открывания механизма, когда опора, запущенная тем же механизмом, упрется в землю.
Так же легко, чтобы закрыть механизм, пользователь поднимает конец кровати и механизм складывает указанные подвижные рамы и указанный матрац внутрь дивана или кресла. Пользователь завершает операцию нажимом на спину до достижения исходного положения.
Все описанные выше механизмы имеют общую характеристику, заключающуюся в том, что они имеют конфигурацию рычагов, которые в закрытом положении механизма в конфигурации дивана, путем перемещения за пределы неподвижного центра, не допускают открывания механизма изнутри за счет противодействия матраца. Единственный способ открыть механизм - действовать на спинку снаружи. То же самое применяется к позиции кровати, в которой некоторые шарниры выравниваются или почти выравниваются с целью предотвращения или почти полного предотвращения самопроизвольного закрывания механизма, когда кровать нагружена. Таким образом, единственный способ закрыть этот механизм - поднять конец кровати.
Все эти механизмы, кроме того, снабжены несколькими упругими элементами и механизмами, которые уменьшают усилие, необходимое пользователю для выполнения операции открывания и закрывания. Очевидно, что это усилие никогда не может быть нулевым, в противном случае не было бы никаких устойчивых положений механизма.
Эволюция описанных выше механизмов с ручным открыванием состоит в снабжении их автоматическими устройствами открывания, чтобы ограничить до минимума вмешательство оператора для перехода от одной конфигурации к другой.
Но несмотря на то, что эти механизмы имеют только одну степень свободы, их нельзя привести в действие ни из каких точек, кроме как из описанной выше, и, следовательно, их нельзя привести в действие, например, с помощью единственного исполнительного устройства, расположенного в основании.
По существу, требуются по меньшей мере два исполнительных устройства, удобно взаимодействующих так, чтобы запускались в разное время и имели скорости, совместимые с теми, которые задает механизм, несмотря на то, что механизм имеет одну единственную степень свободы.
Если бы захотели адаптировать степени свободы механизмов к числу представленных исполнительных устройств, эти механизмы нужно было бы преобразовать, получив таким образом две степени свободы, каждая с управлением от исполнительного устройства, устраняющие описанный выше недостаток.
Эти решения известного типа страдают недостатками, включая тот факт, что даже если бы они могли быть реализованы, экономически они обременительны и едва ли надежны.
По существу, в механизмах, в которых используются эти решения с двумя исполнительными устройствами, во время открывания первое устройство приводит в действие механизм спинки, которая, как уже отмечалось, также держит матрац в сжатом состоянии и предотвращает самопроизвольное открывание механизма. Только после этого первого шага в работу вступает второе исполнительное устройство, расположенное в неподвижном каркасе, и завершает движение открывания, тогда как первое устройство при этом действует, адаптируя собственную скорость.
Для достижения синхронизации между движениями двух исполнительных устройств используются электрические концевые выключатели или исполнительные устройства, снабженные датчиками положения, т.е., исполнительные устройства, имеющие обратную связь, информирующую о достигнутой позиции. Безусловно, более простым решением является отделение движения для складывания подушек спинки на подушки сиденья и последующего опрокидывания подвижных рам от движения для подъема и вытягивания рам из неподвижного каркаса. В этом случае всегда используются два исполнительных устройства и запускаться они должны в любом случае с заданной синхронизацией по времени во избежание столкновений с неподвижной конструкцией дивана, но нет необходимости, чтобы у них были скорости, сопоставимые со скоростями, которые устанавливаются кинематикой с одной степенью свободы.
Однако наличие двух исполнительных устройств существенно усложняет эти механизмы с конструктивной точки зрения. Необходимо учитывать, что первое исполнительное устройство, расположенное внутри спинки, при достижении конфигурация кровати располагается вместе со спинкой ниже плоскости кровати, на ее конце, и, следовательно, очень далеко от неподвижного каркаса.
Таким образом, электрическое соединение должно проходить вдоль всех подвижных рам, пока не достигнет неподвижного каркаса, где находится источник питания и блок управления. Это безусловно влечет за собой некоторые противопоказания, и, в частности необходимость скрыть электрический кабель из эстетических соображений и особенно необходимость использовать кабель, который может выдержать постоянное сгибание и растягивание во время движения подвижных рам.
Кроме того, предусмотрен отсек, обычно в спинке, рассчитанный для хранения постельных подушек, и этот отсек частично занят исполнительным устройством, которое необходимо скрыть из эстетических соображений и чтобы избежать загрязнения этих подушек.
Не следует также игнорировать и тот факт, что если одно из исполнительных устройств останавливается, а другое продолжает свой ход, поломки механизма могут возникнуть дополнительно к проблемам безопасности из-за непредсказуемости траектории движения самого механизма, потому что только часть механизма выполняет свой ход, в то время как другая часть остается в последней достигнутой позиции.
Другой недостаток этих решений известного типа заключается в том, что эти механизмы, непосредственно происходящие из соответствующих механизмов с ручным открыванием, должны преодолеть сопротивление изгибу, возникающее из точки приложения сил. Фактически, в отличие от исполнительного устройства, расположенного в спинке, которое способно смоделировать усилие, прилагаемое пользователем к этому же элементу, исполнительное устройство, расположенное в неподвижном каркасе, имеет точку приложения, совершенно отличную от точки приложения пользователя. Если рассматривать закрывание механизма, пользователь фактически захватывает конец последней подвижной рамы и поднимает ее и в результате подвижные рамы складываются по отношению друг к другу. Исполнительное устройство, расположенное в неподвижном каркасе, наоборот, действует с другого конца кинематической цепи, с очевидно более значительными усилиями. На практике, в то время когда пользователь применяет очень длинное плечо рычага, выполняя очень широкое перемещение, исполнительное устройство, расположенное в неподвижном каркасе, должно было бы выполнить такую же работу, но с безусловно более короткими рычагами и поэтому имеют небольшие перемещения, с последующим привлечением интенсивных сил.
Все это приводит к использованию очень мощных исполнительных устройств и к очень интенсивным напряжениям, воздействующим на механизм, с последующей его надежности.
Целью настоящего изобретения является создание дивана-кровати с облегченным открыванием, в частности, с автоматическим приводом, в котором имеется механизм, работа которого, по существу, аналогична работе, описанной ранее с автоматическим приводом при помощи одного электрического исполнительного устройства, что решает и исключает, соответственно, недостатки и ограничения прототипа.
В рамках этой цели задачей настоящего изобретения является создание дивана-кровати с облегченным открыванием, позволяющим пользователю переходить от конфигурации дивана к конфигурации кровати и наоборот простым нажатием кнопки.
Другой задачей настоящего изобретения является создание дивана-кровати с облегченным открыванием, который экономически предпочтителен по сравнению с прототипом.
Эта цель и эти и другие задачи, которые станут более очевидными далее, достигаются с помощью дивана-кровати с облегченным открыванием, в частности, с автоматическим приводом, содержащим неподвижный каркас, образующий отсек для размещения матраца, который может складываться по меньшей мере в четыре части и поддерживаться по меньшей мере четырьмя подвижными рамами, по одной на каждую из указанных частей матраца, первая подвижная рама связана с указанным неподвижным каркасом, причем указанные по меньшей мере четыре подвижные рамы взаимно шарнирно соединены последовательно относительно друг к другу, образуя кинематическую цепь с одной степенью свободы, которая может перемещаться между закрытой конфигурацией, в которой указанные по меньшей мере четыре подвижные рамы, по существу, взаимно противоположны попарно, образуя клетеобразную конструкцию, окружающую указанный матрац, сложенный по меньшей мере в четыре части, и открытой конфигурацией, в которой указанные по меньшей мере четыре подвижные рамы, по существу, взаимно выравниваются, образуя несущую поверхность, на которой лежит развернутый матрац, причем также предусмотрены приводы, которые связаны с указанным неподвижным каркасом и функционально соединены с указанными по меньшей мере четырьмя подвижными рамами для обеспечения их движения между открытой конфигурацией и закрытой конфигурацией, отличающийся тем, что указанные приводы содержат по меньшей мере одно линейное исполнительное устройство, которое работает по прямой линии действия, по существу параллельной направлению разворачивания указанных по меньшей мере четырех подвижных рам, указанное по меньшей мере одно линейное исполнительное устройство шарнирно прикреплено к указанному неподвижному каркасу и функционально связано с упомянутыми по меньшей мере четырьмя подвижными рамами множеством рычагов, которые соединены между собой и связаны с указанными по меньшей мере четырьмя подвижными рамами.
Другие отличительные признаки и преимущества настоящего изобретения станут более очевидными из описания двух предпочтительных, но не исключительных, вариантов осуществления дивана-кровати с облегченным открыванием, в частности, с автоматическим приводом, проиллюстрированном с помощью не ограничивающего примера на прилагаемых рисунках, на которых:
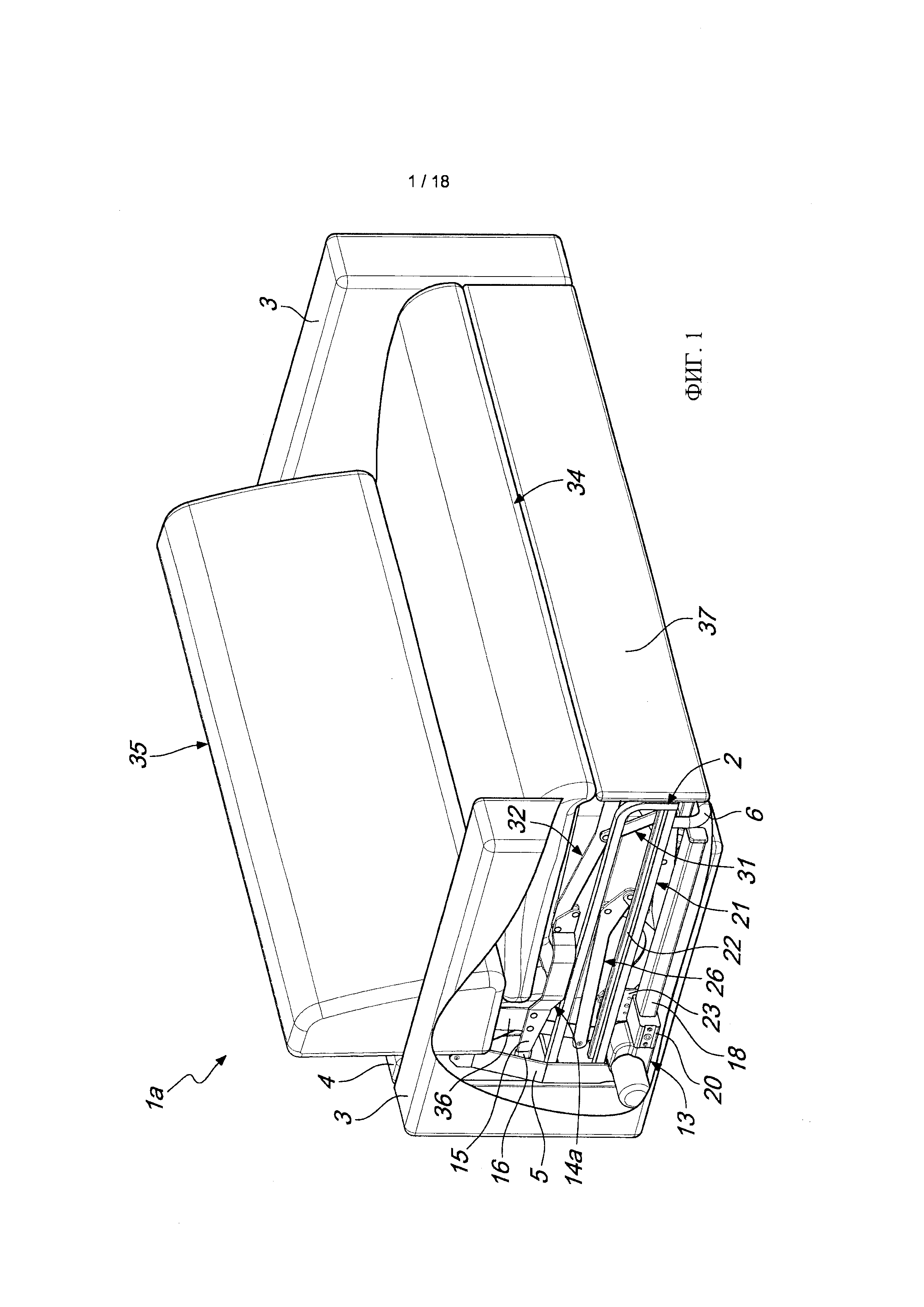
Фигура 1 - вид в перспективе с частичным вырезом первого варианта осуществления дивана-кровати с облегченным открыванием, в частности, с автоматическим приводом в соответствии с изобретением, в закрытой конфигурации;
Фигура 2 - вид в перспективе с частичным вырезом дивана-кровати, показанного на Фигуре 1, в положении, промежуточной между его закрытой и открытой конфигурациями;
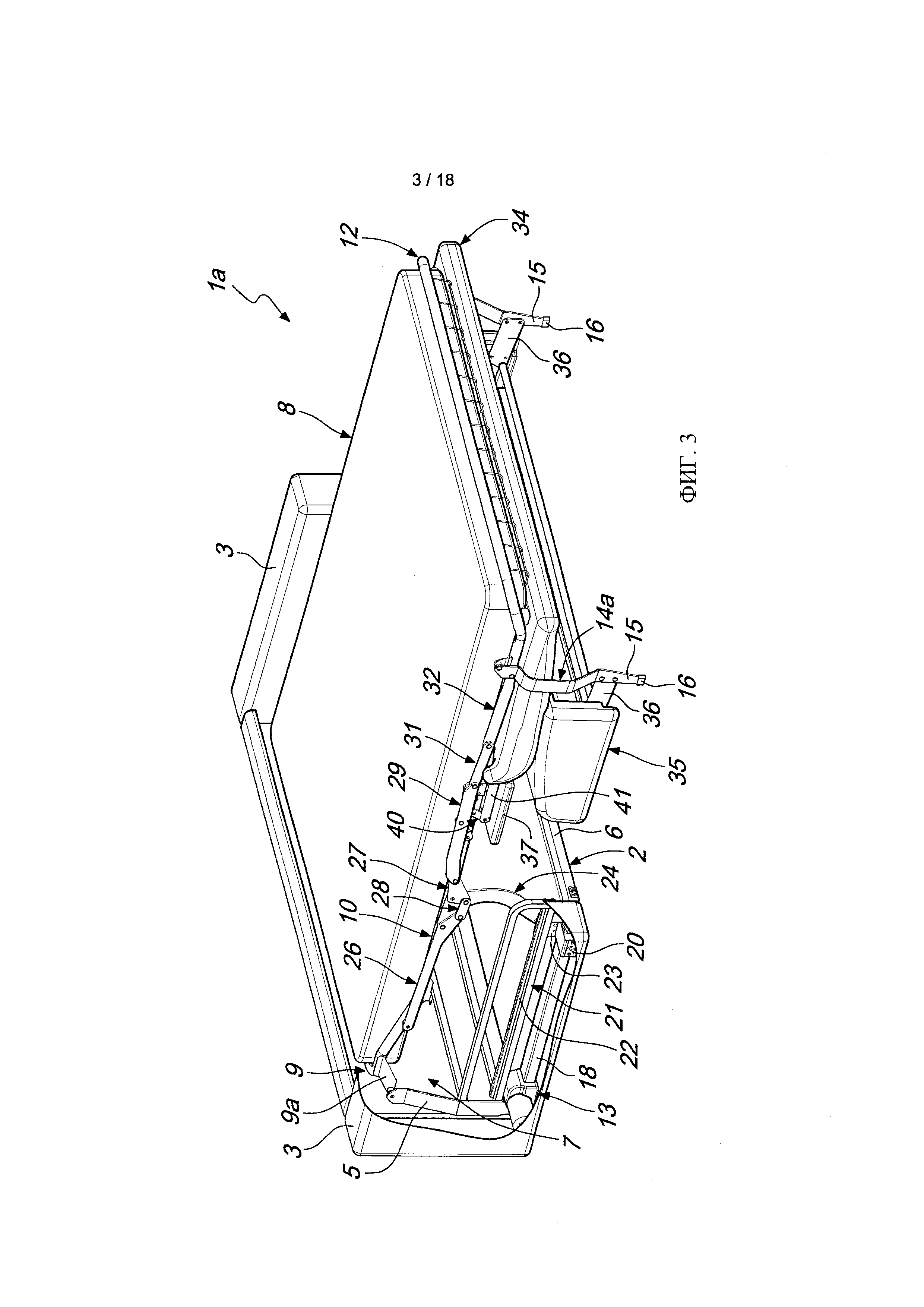
Фигура 3 - вид в перспективе с частичным вырезом дивана-кровати, показанного на предыдущих фигурах, в открытой конфигурации;
Фигура 4 - вид в перспективе механизма дивана-кровати, показанного на предыдущих фигурах, в закрытой конфигурации;
Фигура 5 - вид в перспективе механизма, показанного на Фигуре 4, в положении, промежуточном между закрытой и открытой конфигурациями дивана-кровати;
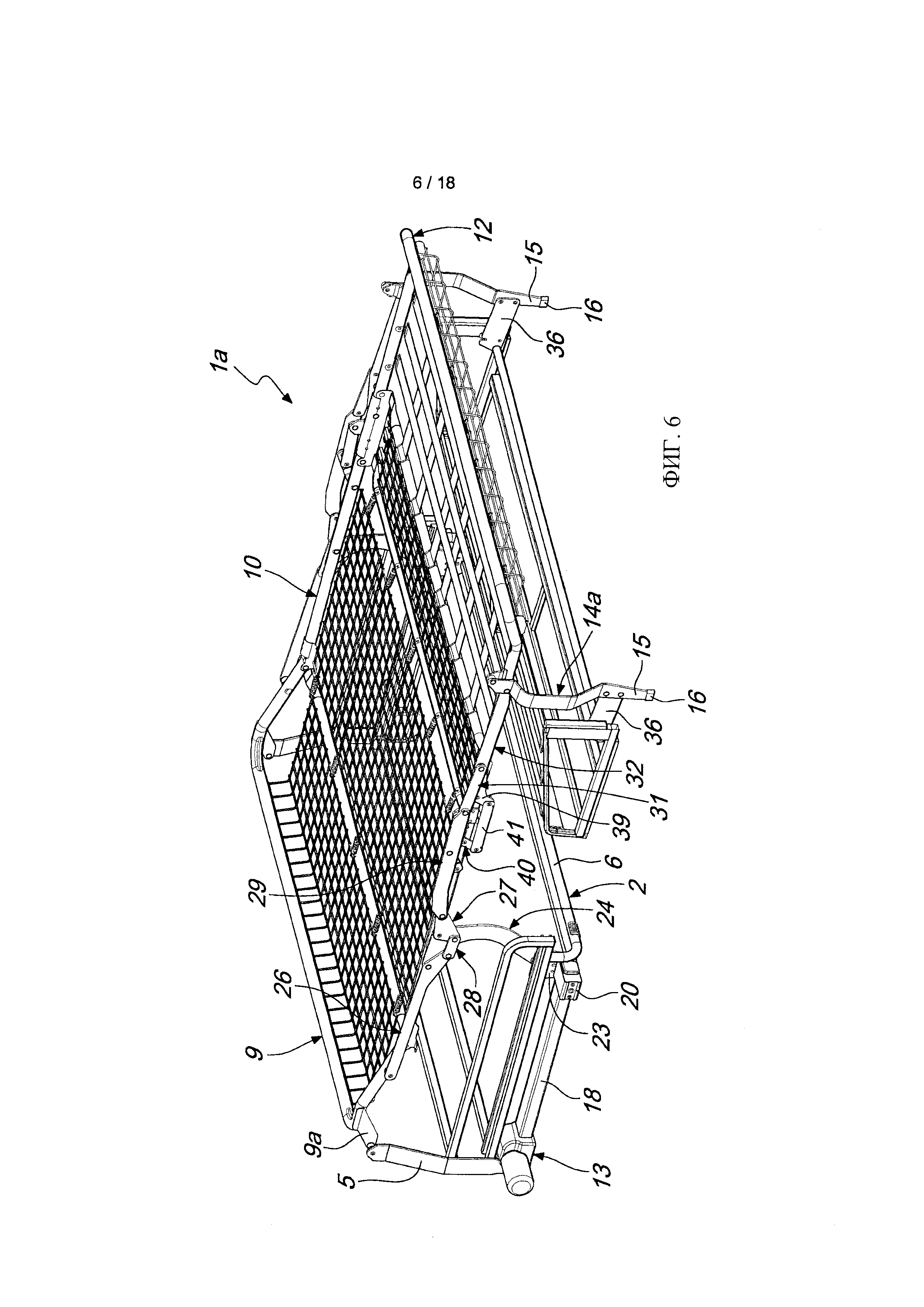
Фигура 6 - вид в перспективе механизма, показанного на предыдущих фигурах, в открытой конфигурации;
Фигуры 7-13 - виды сбоку дивана-кровати, показанного на предыдущих фигурах, демонстрирующие во временной последовательности переход из закрытой конфигурации в открытую конфигурацию;
Фигура 14 - вид в перспективе с частичным вырезом второго варианта осуществления дивана-кровати с облегченным открыванием, в частности, с автоматическим приводом в соответствии с изобретением в открытой конфигурации;
Фигура 15 - вид в перспективе механизма дивана-кровати, показанного на Фигуре 14, в положении, промежуточным между закрытой и открытой конфигурациями дивана-кровати;
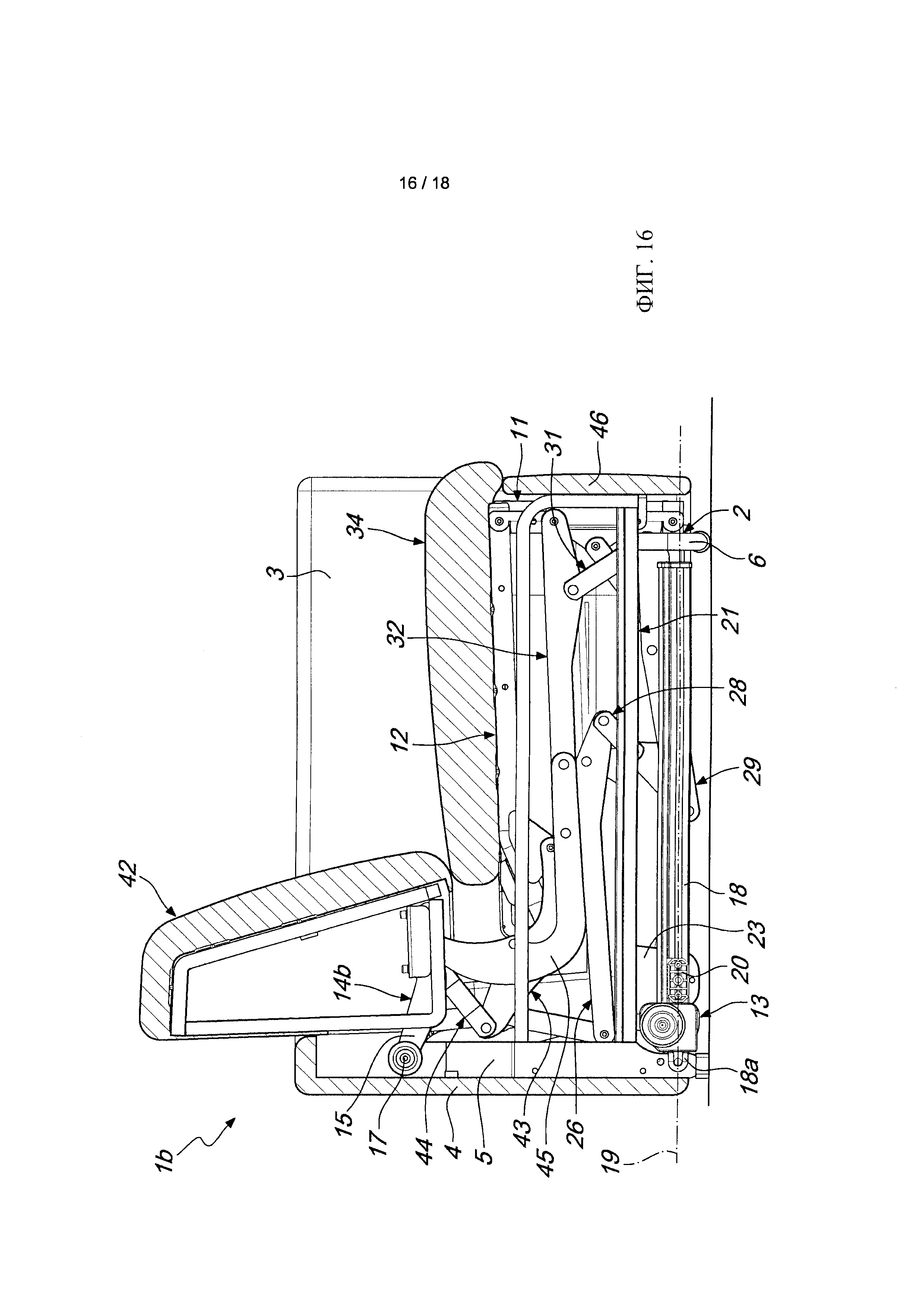
Фигуры 16-18 - виды сбоку дивана-кровати, показанного на Фигурах 14 и 15, показывающих во временной последовательности переход из закрытой конфигурации в открытую конфигурацию.
Со ссылкой на фигуры, диван-кровать с облегченным открыванием, в частности, с автоматическим приводом, в общем обозначенный в двух предложенных вариантах осуществления ссылочными символами 1а и 1b, содержит неподвижный каркас 2, к которому сбоку прикреплены два боковых подлокотника 3 и задняя закрывающая панель 4.
Точнее, неподвижный каркас 2 в основном имеет L-образную форму в боковой проекции, так что образуется вертикальная стойка 5, которая расположена в задней части дивана-кровати 1а или 1b и к которой прикреплена задняя закрывающая панель 4, и нижнюю опору 6, так что на стороне, противоположной задней закрывающей панели 4, образуется отсек 7 для размещения матраца 8, который может складываться по меньшей мере в четыре части и поддерживаться по меньшей мере четырьмя подвижными рамами 9, 10, 11 и 12, по одной для каждой части матраца 8.
В целях удобства четыре подвижные рамы 9, 10, 11 и 12, каждая из которых образует опорную конструкцию матраца 8, которые выполнены из проволочных сеток и/или планок и/или эластичных лент, взаимно шарнирно соединяются последовательно по отношению друг к другу, образуя кинематическую цепь с одной степенью свободы, связанную с неподвижным каркасом 2 посредством первой подвижной рамы 9, чей свободный конец 9а шарнирно прикреплен к вертикальной стойке 5.
Как будет описано более подробно ниже, также предусмотрены приводы 13, которые связаны с неподвижным каркасом 2 и функционально связаны с четырьмя подвижными рамами 9, 10, 11 и 12 для их перемещения между закрытой конфигурацией, в которой четыре подвижные рамы 9, 10, 11 и 12, по существу, взаимно противоположны попарно, образуя конструкцию в виде клетки, в которой содержится матрац 8, сложенный по меньшей мере вчетверо, и открытую конфигурацию, в которой четыре подвижные рамы 9, 10, 11 и 12, по существу, взаимно выравниваются, образуя несущую поверхность, на которой лежит разложенный матрац 8.
Кроме того, в зависимости от рассматриваемого варианта осуществления имеется по меньшей мере одна пятая подвижная рама 14а или 14b, которая связана с четвертой подвижной рамой 12 и образует две опорные ножки 15, которые могут располагаться в открытой конфигурации на стороне, противоположной неподвижному каркасу 2, чтобы поддерживать опорную поверхность на земле.
В зависимости от конструктивных предпочтений, опорные ножки 15 могут быть снабжены опорными лапками 16, как показано на Фигурах 1-13 в отношении первого предложенного варианта осуществления, или опорными колесами 17, как показано на Фигурах 14-18 в отношении второго предложенного варианта осуществления.
В соответствии с изобретением приводы 13 содержат по меньшей мере одно линейное исполнительное устройство 18, которое действует по прямой линии действия 19, то есть в основном параллельно направлению разворачивания подвижных рам 9, 10, 11 и 12.
Более конкретно, линейное исполнительное устройство 18 шарнирно прикреплено на одном из концов 18а к неподвижному каркасу 2 и функционально связано с подвижными рамами 9, 10, 11 и 12 с помощью множества рычагов 24, 26, 29 и 32, которые соединены между собой и связаны, в свою очередь, с подвижными рамами 9, 10, 11 и 12.
Точнее, линейное исполнительное устройство 18 прикреплено к нижней опоре 6, обеспечивая перемещение ползуна 20, который может двигаться параллельно прямой направляющей 21, образованной указанной нижней опорой 6.
Прямая направляющая 21 образована горизонтальным направляющим устройством 22, в котором размещен приводной кронштейн 23 с возможностью скольжения и составляет одно целое при поступательном движении с ползуном 20 и шарнирно прикреплен к одному концу 24а первого рычага 24, более подробное объяснение функции которого будет приведено ниже.
Приводной кронштейн 23, следовательно, является соединительным элементом между механизмом, отвечающим за кинематику подвижных рам 9, 10, 11, 12 и 14а или 14b, и линейным исполнительным устройством 18.
По существу, линейное исполнительное устройство 18 шарнирно закреплено в фиксированной точке нижней опоры 6, а приводной кронштейн 23, который составляет одно целое при поступательном движении с ползуном 20, блокируется в горизонтальном направляющем устройстве 22, образуя ограничитель в виде каретки. Другими словами, когда линейное исполнительное устройство 18 приводится в действие, ползун 20 перемещает вперед или назад приводной кронштейн 23, который скользит в горизонтальной направляющей канавке 22.
В целях снижения трения кронштейн исполнительного устройства 23 скользит в горизонтальной направляющей канавке 22 с помощью пары подшипников 25 или, в любом случае, технически эквивалентными элементами.
Для удобства, приводной кронштейн 23, подшипники 25 и горизонтальная канавка 22 представляют собой компоненты, которые позволяют избежать воздействия аномальной нагрузки на линейное исполнительное устройство 18. По существу, только с кинематической точки зрения достаточно заблокировать жестко линейное исполнительное устройство 18 на нижней опоре 6 и шарнирно прикрепить первый рычаг 24 непосредственно к ползуну 20. Однако при такой конфигурации на линейное исполнительное устройство 18 также воздействовала бы нагрузка сил под прямыми углами к направлению движения, сил, на которые линейное исполнительное устройство 18 могло быть не рассчитано.
В заключение, для того, чтобы привести в действие механизм, полагаются на линейное исполнительное устройство 18, расположенное в неподвижном каркасе 2 на одной из двух сторон механизма, в то время как противоположная сторона совершает такое же движение, индуцированное несколькими соединительными элементами, предусмотренными на подвижных рамах 9, 10, 11, 12 и 14а или 14b, и на всех других боковых компонентах дивана-кровати 1а и 1b.
Это не исключает возможности введения второго линейного исполнительного устройства, идентичного первому, на противоположной стороне механизма, чтобы удвоить усилие срабатывания и распределить силы более сбалансированным образом на двух сторонах дивана-кровати 1а и 1b.
Прежде чем перейти к дальнейшему подробному описанию механизма в целом, который отвечает за кинематику подвижных рам 9, 10, 11, 12 и 14а или 14b, следует подчеркнуть, что фигур, представляющих виды сбоку диванов-кроватей 1а и 1b, достаточно для описания работы механизма, поскольку движение происходит по двумерной траектории. Поэтому рычаги, которые проходят на одной стороне механизма, могут сами охарактеризовать движение. Подразумевается, однако, что на противоположной стороне есть зеркально-симметричный дублирующий элемент.
Как ранее представлено, в обоих предлагаемых вариантах осуществления первый рычаг 24 связан с ползуном 20 посредством конца 24а, шарнирно прикрепленного к приводному кронштейну 23, который составляет одно целое при поступательном движении с ползуном 20.
На другом конце 24b и в промеж уточной части 24 с первый рычаг 24 шарнирно прикреплен, соответственно, к промежуточной части 26 с второго рычага 26 и к промежуточной части второй подвижной рамы 10.
Кроме того, второй рычаг 26, напротив, шарнирно прикреплен одним из концов 26а к промежуточной части первой подвижной рамы 9.
Таким образом, с продвижением ползуна 20 в направлении разворачивания матраца 8 вторая подвижная рама 10 существенно перемещается, при этом продвигается вперед, поднимается, пока не расположится горизонтально и не образует часть несущей поверхности матраца 8.
Одновременно с этим первая подвижная рама 9 перемещается с помощью второго рычага 26, вращающегося вокруг своей точкой шарнирного крепления с вертикальной стойкой, пока не расположится горизонтально, также образуя часть несущей поверхности матраца 8.
Кроме того, в основном L-образный рычаг передачи 27 шарнирно прикреплен в вершине 27 с указанной L-образной формы к первому рычагу 24, по существу в точке шарнирного крепления, образованной между указанным первым рычагом 24 и второй подвижной рамой 10.
Коаксиальное расположение точки поворота, образованной между рычагом передачи 27 и первым рычагом 24, с одной стороны, и точкой поворота, образованной между первым рычагом 24 и второй подвижной рамой 10, с другой стороны, не обязательное, но достаточное для шарнирного прикрепления рычага передачи 27 к первому рычагу 24 в точке, расположенной рядом с точкой шарнирного крепления указанного первого рычага 24 к второй подвижной раме 10.
Концы 27а, 27b рычага передачи 27 дополнительно шарнирно прикреплены, соответственно, к первой тяге 28, которая в свою очередь шарнирно прикреплена к другому концу 26b второго рычага 26 и к концу 29а третьего рычага 29, который связан с третьей подвижной рамой 11 и с четвертой подвижной рамой 12 для совместного вращения и поступательного перемещения указанных рам до достижения ими горизонтального положения, чтобы завершить образование несущей поверхности матраца 8.
Такая конфигурация приводит к повороту примерно на 90° первого рычага 24 по отношению к второй подвижной раме 10, чтобы соответствовать повороту примерно на 180° рычага передачи 27 по отношению к указанной второй подвижной раме 10.
Точнее, третий рычаг 29 шарнирно прикреплен в промежуточной части 29 с к второй тяге 30, которая в свою очередь шарнирно прикреплена к второй подвижной раме 10 рядом с точкой шарнирного крепления между указанной второй подвижной рамой 10 и третьей подвижной рамой 11.
Другой конец 29b третьего рычага 29 шарнирно прикреплен к третьей тяге 31, которая в свою очередь шарнирно прикреплена к промежуточной части 32 с четвертого рычага 32, который связан с третьей подвижной рамой 11 и с пятой подвижной рамой 14а или 14b, вызывая вращение последней по отношению к предыдущей, с тем чтобы опорные ножки 15 расположились, по существу, вертикально по отношению к полу.
Кроме того, вторая тяга 30 шарнирно прикреплена в промежуточной части к четвертой тяге 33, которая в свою очередь шарнирно прикреплена к промежуточной части третьей подвижной рамы 11.
Четвертый рычаг 32 шарнирно прикреплен на концах 32а и 32b, соответственно, к третьей подвижной раме 11 между точкой шарнирного крепления к четвертой тяге 33 и точкой шарнирного крепления к четвертой подвижной раме 12 и к пятой подвижной раме 14а или 14b.
Кроме того, для окончательного формирования диванов-кроватей 1а и 1b для каждого из них используются подушки сиденья 34, которые связаны с четвертой подвижной рамой 12 на стороне, противоположной матрацу 8.
С конкретной ссылкой на Фигуры 1-13, в первом предлагаемом варианте осуществления диван-кровать 1а содержит спинку 35, которая составляет одно целое с пятой подвижной рамой 14а, которая образована, по существу, опорными ножками 15, с помощью опорного кронштейна 36, который составляет одно целое с пятой подвижной рамой 14а и, по существу, расположен под прямыми углами к ней, причем рама 14а шарнирно прикреплена к четвертой подвижной раме 12.
Кроме того, в первом варианте осуществления предусмотрена передняя закрывающая панель 37, которая связана с третьей подвижной рамой 11 на стороне, противоположной матрацу 8, посредством шарнирно соединенной четырехугольной конструкции 38, образованной третьей подвижной рамой 11, с помощью выступающего ушка 39 четвертого рычага 32, которое расположено рядом с третьей подвижной рамой 11 и шарнирно прикреплено к опоре 41, которая жестко поддерживает переднюю закрывающую панель 37, и с помощью пятой тяге 40, которая шарнирно прикреплена концами соответственно к опоре 41 и к третьей подвижной раме 11, по существу, в точке шарнирного крепления к второй подвижной раме 10.
Преимуществом этого первого варианта осуществления механизма является то, что он очень простой и особенно подходит для тех случаев, когда подушки сиденья 34 и спинки 35 не очень толстые. По существу, в открытой конфигурации, т.е. конфигурации кровати, более толстая часть спинки 35 прижимается к более толстой части подушек сиденья 34. Для уменьшения этого сжатия передняя закрывающая панель 37 прикреплена к опоре 41, которая перемещается с помощью четвертого рычага 32, чтобы предотвращалось сжатие подушек сиденья 34 между спинкой 35 и передней закрывающей панелью 37.
С конкретной ссылкой на Фигуры 14-18, во втором предлагаемом варианте осуществления диван-кровать 1b содержит спинку 42, которая составляет одно целое с пятой подвижной рамой 14b, которая также образована, по существу, опорными ножками 15, конец 32b четвертого рычага 32, шарнирно прикрепленный к пятой подвижной раме 14b, который имеет, по существу, С-образную форму, частично окружая подушки сиденья 34 сзади.
Имеется пятый рычаг 43, шарнирно прикрепленный на концах 43а, 43b к четвертой подвижной раме 12 и к шестой тяге 44, которая в свою очередь шарнирно прикреплена к промежуточной части пятой подвижной рамы 14b.
Точнее, промежуточная часть 43 с этого пятого рычага 43 шарнирно прикреплена к центральной части 45 в основном С-образного конца 32b четвертого рычага 32 для вращения спинки 42 при переходе из закрытой конфигурации в открытую конфигурацию и наоборот.
Как можно заключить из фигур, в этом варианте осуществления четвертый рычаг 32 выполнен из двух деталей, по одной для каждого конца 32а и 32b, но ничто не мешает выполнить его цельным.
В этом случае передняя закрывающая панель, которая в этом варианте осуществления обозначена ссылочной позицией 46, прикреплена непосредственно к третьей подвижной раме 11 на стороне, противоположной матрацу 8.
Это не исключает возможности использования такого же механизма, как в первом варианте осуществления, хотя в этом случае он не обладает такой же практичностью. Кроме того, в первом варианте осуществления также можно рассматривать жесткое крепление передней закрывающей панели 37 к третьей подвижной раме 11.
Этот второй вариант осуществления, эксплуатация которого практически эквивалентна эксплуатации первого варианта осуществления, позволяет собирать опорные ножки 15 в меньшем пространстве, когда механизм находится в закрытой конфигурации, т.е. конфигурации дивана, и, следовательно, в открытой конфигурации, т.е., конфигурации кровати, спинка 42 перемещается к концу указанной кровати.
Следовательно, пространство для подушек сиденья 34 увеличивается, поскольку более толстая часть спинки 42 прижимается к более тонкой части сиденья и наоборот.
Кроме того, в таком положении спинки 42 подушки сиденья 34 могут накладываться на переднюю закрывающую панель 46.
Именно поэтому в этом втором варианте осуществления опора 47 передней закрывающей панели 46 жестко прикреплена к третьей раме 11 и ее больше не нужно сдвигать, чтобы освободить пространство для подушек сиденья 34.
Это не исключает возможности использования такого же шарнирно соединенного четырехугольника 38, как в первом варианте осуществления, также и во втором варианте, чтобы еще больше увеличить пространство, предназначенное для подушек сиденья 34.
С другой стороны, в первом варианте осуществления также можно рассматривать вопрос об использовании фиксированного метода решения, за счет пространства, предназначенного для подушек сиденья 34.
Со ссылкой на оба предлагаемых варианта осуществления, предпочтительно спинки 35 и 42 формируются каркасом с удобной мягкой набивкой и покрытием с образованием внутреннего отсека для хранения подушек или одеял. В этом отсеке не располагается ни одно исполнительное устройство или механический элемент, как это предусмотрено в автоматизированных механизмах прототипа.
Эксплуатация дивана-кровати 1a, 1b в соответствии с изобретением понятно и наглядно представлена в приведенном до сих пор описании.
В частности, со ссылкой на Фигуры 7-13 и на Фигуры 16-18, на которых во временной последовательности показан переход из закрытой конфигурации к открытой конфигурации, соответственно, в первом варианте осуществления и во втором варианте осуществления линейное исполнительное устройство 18 путем действия на приводной кронштейн 23 вызывает перемещение точки шарнирного крепления с первым рычагом 24, который, управляемый вторым рычагом 26, совершает комбинированное вращательное и поступательное движение. Это движение поворачивает первую раму 9 и заставляет вторую раму 10 выполнить существенное поступательное движение.
На практике, вторая рама 10 поднимается из исходного положения, оставаясь почти горизонтальной. Одновременно с этим третий рычаг 29, приводимый в действие первой тягой 28 и рычагом передачи 27 и управляемый второй тягой 30, перемещает третью раму 11 и четвертый рычаг 32, с помощью третьей тяги 31 и четвертой тяги 33.
Таким путем в первом варианте осуществления четвертый рычаг 32 поворачивает подвижную пятую раму 14а по отношению к четвертой подвижной раме 12, а последнюю по отношению к третьей подвижной раме 11.
Этот же четвертый рычаг 32 благодаря выступающему ушку 39 перемещает опору 41 передней закрывающей панели 37 по отношению к третьей подвижной раме 11, с тем чтобы отодвинуть переднюю закрывающую панель 37 от подушек сиденья 34.
При вращении пятой подвижной рамы 14а, и, следовательно, опорной ножки 15, выдвигается также спинка 35, прижатая к подушкам сиденья 34.
В этом первом варианте осуществления, чтобы избежать разрезания подушек сиденья 34, пятая подвижная рама 14а имеет такую форму, чтобы она могла пройти между указанными подушками сиденья 34 и боковыми подлокотниками 3.
Иными словами, во втором варианте осуществления, напротив, пятая подвижная рама 14b, а также пятый рычаг 43, проходят за подушками сиденья 35 и 42, и, следовательно, нет необходимости определять контуры.
Это различие между двумя вариантами осуществления отчетливо видно на Фигурах 3 и 14.
В заключение, движение открывания не завершается, когда опорные ножки 15 стоят на полу, а когда подвижные рамы 9, 10, 11 и 12 выравниваются точно.
При выполнении процедуры в обратном направлении, напротив, происходит переход из открытой конфигурации в закрытую конфигурацию.
На практике было установлено, что диван-кровать с облегченным открыванием, в частности, с автоматическим приводом согласно изобретению, снабженный механизмом, который кинематически существенно отличается от предлагаемых в настоящее время на рынке, позволяет решать и преодолевать, соответственно, недостатки и ограничения прототипа, что позволяет использовать одно исполнительное устройство, расположенное в неподвижной конструкции дивана для обеспечения возможности перехода из одной конфигурации в другую.
Это стало возможным благодаря тому, что этот механизм, который имеет одну степень свободы, нельзя открывать и закрывать вручную классическим способом, но можно легко открывать и закрывать, управляя рычагами внутри неподвижного каркаса.
Еще одно преимущество дивана-кровати в соответствии с настоящим изобретением заключается в том, что он снабжен весьма безопасным механизмом, поскольку при наличии одной степени свободы его движение всегда одинаковое и предсказуемое.
Снова обращаясь к области безопасности, дополнительное преимущество дивана-кровати в соответствии с настоящим изобретением заключается в том, что он снабжен механизмом, который может открываться и закрываться, оставаясь всегда очень низко над полом, сводя к минимуму высоту подвесных масс во время движения благодаря передней закрывающей панели, которая поступательно движется вместе с подвижными рамами.
Еще одно преимущество дивана-кровати в соответствии с настоящим изобретением состоит в том, что в конфигурации кровати обеспечивается очень устойчивая конструкция.
Точнее, это преимущество связано с тем, что, как показано на Фигуре 12, опорные ножки касаются пола до того, как подвижные рамы выравниваются.
Ход, выполняемый линейным исполнительным устройством с момента, когда опорные ножки опираются на пол, до тех пор пока подвижные рамы полностью не выровняются, позволяет первому рычагу принять почти вертикальное положение, чтобы предотвратить непроизвольное закрывание механизма, когда несущая поверхность кровати нагружена.
В этой ситуации на горизонтальную направляющую ползуна линейного исполнительного устройства высвобождается почти вертикальная сила, что делает движение назад указанного ползуна практически невозможным.
В любом случае желательно принимать во внимание, что линейные исполнительные устройства имеют определенное передаточное число, которое затрудняет движение ползуна, когда они без питания. Решение в соответствии с изобретением, однако, делает возможным избежать чрезмерных напряжений, которые могут вызвать непроизвольные обратные движения ползуна или в любом случае привести к повреждению линейного исполнительного устройства.
В этом положении, кроме того, достигается расположение по одной прямой трех поворотных перемещений: между первой подвижной рамой и вторым рычагом, между вторым рычагом и первым рычагом и между первым рычагом и второй подвижной рамой.
Такое выравнивание способствует устойчивости кровати, потому что оно предотвращает относительные вращения первой подвижной рамы относительно второй подвижной рамы, даже если пользователь загружает поворотное перемещение между двумя рамами.
Еще одно преимущество дивана-кровати в соответствии с настоящим изобретением состоит в том, что от линейного исполнительного устройства требуется уменьшенная сила при удержании механизма на последнем этапе открывания и особенно при подъеме механизма на первом этапе закрывания. В эти моменты, фактически, значительная часть механизма выступает консольно из неподвижного каркаса. Кроме того, на этих этапах точки шарнирного крепления механизма почти все расположены рядом с несущей поверхностью матраца и имеется множество выравниваний, которые, как уже упоминалось, препятствуют непроизвольному закрыванию механизма.
Частичное складывание конструкции, когда опорные ножки все еще стоят на полу, позволяет нарушить эти выравнивания, точно так, как это сделал бы пользователь в случае открывания и закрывания механизмов вручную.
Фактически, несущая реакция, действующая на опорные ножки, точно воспроизводит подъемную силу, прилагаемую пользователем к концу кровати в случае с ручными механизмами.
На этапе, когда опорные ножки стоят на полу, в точке контакта могут появиться небольшие царапины, и, следовательно, предпочтительно использовать опорное колесо, как описано во втором варианте осуществления.
Но это решение может быть использовано и в первом варианте осуществления, хотя учитывая степени движений, его можно опустить.
Когда в конце этого шага плечи рычага становятся более подходящими и выравнивания нарушаются, опорные ножки отрываются от пола и начинается совместное вращение и поступательное движение подвижных рам.
На этом этапе, в любом случае, линейному исполнительному устройству помогает вес самой конструкции.
Фактически, как упоминалось выше, вторая подвижная рама выполняет существенное, направленное вниз поступательное движение во время движения закрывания, потому что она не должна выходить за пределы передней закрывающей панели, благодаря тому, что указанная панель также перемещается вместе с третьей рамой.
В известных до сих пор механизмах, по существу, вторая подвижная рама должна выходить за пределы передней закрывающей панели, жестко закрепленной на неподвижном каркасе. Это влечет за собой то, что траектория, по которой следует вторая рама во время открывания, состоит из трех этапов: первый этап, в основном вращение, до тех пор, пока конец второй рамы не выдвинется выше, чем высота передней закрывающей панели; второй этап, в основном поступательное движение, чтобы консольная часть второй рамы тоже выдвинулась выше, чем высота передней закрывающей панели; и, наконец, третий этап вращения, противоположный первому, для повторного выравнивания указанной второй рамы.
Следовательно, во время движения закрывания вращение второй подвижной рамы подняло бы третью и четвертую подвижные рамы, опорные ножки, спинку, подушки сиденья и матрац, и это усилие полностью давило бы на исполнительное устройство.
В случае с рассматриваемым механизмом, напротив, вращение второй подвижной рамы отсутствует, а есть существенное, направленное вниз поступательное движение под действием силы тяжести, которое способствует выполнению частичного подъема перечисленных выше элементов.
На практике работе сил сопротивления, прилагаемой под действием силы тяжести к элементам кинематической цепи от точки шарнирного крепления между второй подвижной рамой и третьей подвижной рамой поступательно, противопоставляется положительная работа, прилагаемая под действием силы тяжести к элементам, которые расположены перед указанной точкой шарнирного крепления.
Снова в свете перспектив уменьшения усилия, требуемого от исполнительного устройства, система с линейным движением вращения позволяет использовать исполнительные устройства с длинным ходом, так что для выполнения одинаковой работы они требуют меньших усилий.
По существу, благодаря этим решениям усилие, требуемое от линейного исполнительного устройства во время открывания и закрывания, достаточно небольшое и позволяет повысить общую надежность системы.
Еще одно преимущество дивана-кровати в соответствии с настоящим изобретением заключается в том, что линейное исполнительное устройство никогда не перемещается из своего исходного положения, а всегда остается стационарным внутри неподвижного каркаса, что позволяет, таким образом, обеспечить помимо быстрой и безопасной сборки простую и надежную электропроводку.
Более того, его расположение скрыто боковыми подлокотниками, что дает значительные преимущества с точки зрения эстетики, а также тишины, чистоты и безопасности эксплуатации.
Еще одно преимущество дивана-кровати в соответствии с настоящим изобретением, связанное с фактом наличия передней закрывающей панели, которая перемещается вперед подвижными рамами, а не жестко прикреплена к неподвижному каркасу, состоит в том, что это еще больше повышает уровень безопасности дивана-кровати.
Действительно, это является большим преимуществом с точки зрения безопасности, так как обеспечивает выход подвижных рам из неподвижного каркаса без необходимости выдвижения за пределы препятствия в виде передней закрывающей панели, а также более низкую траекторию движения, удерживая подвесные массы на относительно небольшой высоте от пола.
Кроме того, в случае поломки механизма, более того, опасность при падении этих подвесных элементов намного меньше.
Кроме того, небольшая высота от пола позволяет человеку, который приводит в действие механизм, контролировать происходящее на другой стороне и предотвратить, например, попадание ребенка или животного под механизм во время движения.
Не следует также недооценивать и то, что этот механизм позволяет использовать закрывающие панели даже значительной высоты, при очевидных преимуществах в плане гибкости конструкции.
Диван-кровать с облегченным открыванием, в частности, с автоматическим приводом, в соответствии с настоящим изобретением, сконструированный таким образом, допускает многочисленные модификации и вариации, которые находятся в пределах объема прилагаемой формулы изобретения.
Все детали, кроме того, могут быть заменены другими технически равноценными элементами.
На практике используемые материалы, насколько они совместимы с конкретным применением, а также условные формы и размеры могут быть любыми в зависимости от требований и существующего уровня техники.
Раскрытие сущности в итальянской патентной заявке № MI 2012A000001, от которой данная заявка заявляет приоритет, включены в данное описание путем ссылки.
Если технические признаки, упомянутые в любом пункте патентной формулы, снабжены ссылочными символами, эти ссылочные символы включены с единственной целью повышения понятности патентной формулы и, соответственно, такие ссылочные символы не имеют ограничивающего действия на интерпретацию каждого элемента, идентифицированного в качестве примера такими ссылочными символами.
Реферат
Изобретение относится к дивану-кровати с облегченным открыванием, в частности, с автоматическим приводом. Диван-кровать (1a, 1b) с облегченным открыванием, в частности с автоматическим приводом, содержит неподвижный каркас (2), образующий отсек (7) для размещения матраца (8), который может складываться по меньшей мере в четыре части и который поддерживается по меньшей мере четырьмя подвижными рамами (9, 10, 11, 12), по одной для каждой из указанных частей указанного матраца (8), причем первая подвижная рама (9) связана с указанным неподвижным каркасом (2), по меньшей мере четыре подвижные рамы (9, 10, 11, 12) взаимно шарнирно соединены последовательно по отношению друг к другу, образуя кинематическую цепь с одной степенью свободы, которая может перемещаться между закрытой конфигурацией, в которой указанные по меньшей мере четыре подвижные рамы (9, 10, 11, 12), по существу, взаимно противоположны попарно, образуя клетеобразную конструкцию, окружающую указанный матрац (8), сложенный по крайней мере в четыре части, и открытой конфигурацией, в которой указанные по меньшей мере четыре подвижные рамы (9, 10, 11, 12), по существу, взаимно выравниваются с образованием несущей поверхности, на которой лежит развернутый матрац (8), также предусмотрены приводы (13), которые связаны с указанным неподвижным каркасом (2) и функционально соединены с указанными по меньшей мере четырьмя подвижными рамами (9, 10, 11, 12) для обеспечения их перемещения между указанной открытой конфигурацией и указанной закрытой конфигурацией, при этом приводы (13) содержат по меньшей мере одно линейное исполнительное устройство (18), которое работает по прямой линии действия (19), по существу, параллельной направлению разворачивания указанных по меньшей мере
Комментарии