Вибрационная система и способ для стимуляции тела человека посредством создания проприоцептивного резонанса - RU2648860C2
Код документа: RU2648860C2
Чертежи


Описание
Заявленное изобретение относится к инновационным вибрационным системам и методам корпоральной стимуляции.
В литературе известно как физическое, так и психологическое положительное влияние на организм человека в результате стимуляции кожных механорецепторов методом вибрации. Такую стимуляцию, однако, на практике нелегко осуществить, воздействуя на тело человека полностью, поскольку физический контакт между телом и обычно используемыми опорами, такими как кресла, кушетки или кровати, препятствует и созданию, и передаче необходимых стимулирующих вибраций и оказывает влияние на общие ощущения пользователя.
В первом случае, действительно, участки, соответствующие опорным частям тела, не подвергаются стимуляции и могут ослаблять стимулирующее воздействие вибрации на другие части тела. Во втором случае ощущение контакта с опорными поверхностями (которые обычно охватывают значительно большую поверхность, чем зоны, которые можно стимулировать при помощи вибрации, используя известные методы) обобщает внимание пользователя и уменьшает или полностью препятствует стимуляции кожных механорецепторов, которая должна осуществляться посредством воздействия вибрации, поскольку большое количество указанных механорецепторов находится только на некоторых точно определенных участках тела.
Некоторые попытки оказывать воздействие на тело человека целиком посредством стимуляции привели к единичным случайным положительным результатам.
Например, US 2009/0139029 описывает кровать с устройством, создающим вибрацию в различных частях кровати. Таким образом получают генерализованную вибрацию, воздействие которой на тело пользователя невозможно должным образом контролировать.
US 6217533 описывает вибрационное устройство, которое помещают, например, под матрас кровати, на кресло или под подушку. Действие вибрации в этом случае еще более рассеянно и неконтролируемо. Такие системы неэффективны с точки зрения возможности контролировать воздействие вибрации на тело человека.
Обнаружено, что, для того, чтобы обеспечить эффективную стимуляцию с помощью вибрации, в зависимости от механорецептора, подвергаемого стимулированию, необходимо генерировать вибрацию заданной частоты, точной амплитуды, с определенным ускорением, в течение определенного периода времени и на точно определенном участке тела. Фактически только сочетание указанных параметров способно обеспечить идеальную активизацию кожных механорецепторов, которые, как доказано, чувствительны только при воздействии на них ряда факторов. Однако представленные до настоящего времени практические воплощения изобретения не демонстрируют полную и точную оценку этих факторов, и, следовательно, полученные результаты часто ограничены.
Также представлены системы для удержания тела пользователя в определенном положении. Однако они не задействованы в применении контролируемой вибрации, а только обеспечивают удобную и расслабляющую систему опоры. Например, WO 2008/117330, WO 2006/079327 и DE 10353714 описывают опорные устройства, на которых может лежать пользователь, при этом его мышцы расслаблены.
Общей целью заявленного изобретения является создание системы вибрации и метода, позволяющих устранить вышеуказанные недостатки, и обеспечить более точно направленную, обширную, регулируемую и эффективную стимуляцию кожных механорецепторов посредством вибрации.
Принимая во внимание указанную цель изобретения, представлена вибрационная система для корпоральной стимуляции, содержащая элементы для опоры тела пользователя в положении полулежа на спине, расположенные таким образом, чтобы по отдельности служить опорой для затылочной зоны, зоны позвоночника, ягодиц, кистей рук, подколенной и пяточной зон, при этом каждый элемент опоры, кроме, в некоторых случаях, элемента опоры для затылочной зоны, снабжен вибрационным устройством для передачи телу контролируемой вибрации посредством запрограммированного управления при помощи электронного контрольного устройства.
Элементы опоры изготовлены из жесткого материала для обеспечения совершенной передачи волны сигнала.
Так, в соответствии с заявленным изобретением появилась идея создания метода образования локализованной вибрации в теле пользователя для осуществления корпоральной стимуляции посредством вибрации, включая обеспечение опоры тела пользователя только в области затылка, позвоночника, ягодиц, кистей рук, подколенной и пяточной зон, таким образом, чтобы удерживать тело пользователя в положении полулежа и создавать вибрацию этих опор, за исключением, в некоторых случаях, затылочной зоны, с возможностью управления частотой и амплитудой вибрации.
Ниже представлены следующие зоны опоры и действующие механизмы:
- опоры, передающие вибрации в пяточную зону, для стимуляции кожных механорецепторов и механорецепторов ахиллова сухожилия;
- опоры, передающие вибрации в зону подколенной ямки (область без жировой прослойки) для стимуляции кожных механорецепторов сухожилий и связочного аппарата;
- опоры, передающие вибрации в ягодичную зону, при этом подвергают стимуляции обширный участок, где находится многочисленное количество кожных механорецепторов;
- опоры, передающие вибрации на ладони, для стимуляции участков с множеством кожных механорецепторов;
- опоры, передающие вибрации в поясничную зону, для стимуляции кожных механорецепторов и околопозвоночных мышц.
Для иллюстрации принципов действия заявленного изобретения и его преимуществ по сравнению с изобретениями предшествующего уровня техники примеры воплощения настоящего изобретения с применением инновационных принципов действия описаны ниже с помощью сопроводительных чертежей.
- Фиг. 1 представляет вид три четверти вибрационной системы согласно заявленному изобретению.
- Фиг. 2 представляет схематически вид сбоку тела человека, расположенного на системе, изображенной на фиг. 1.
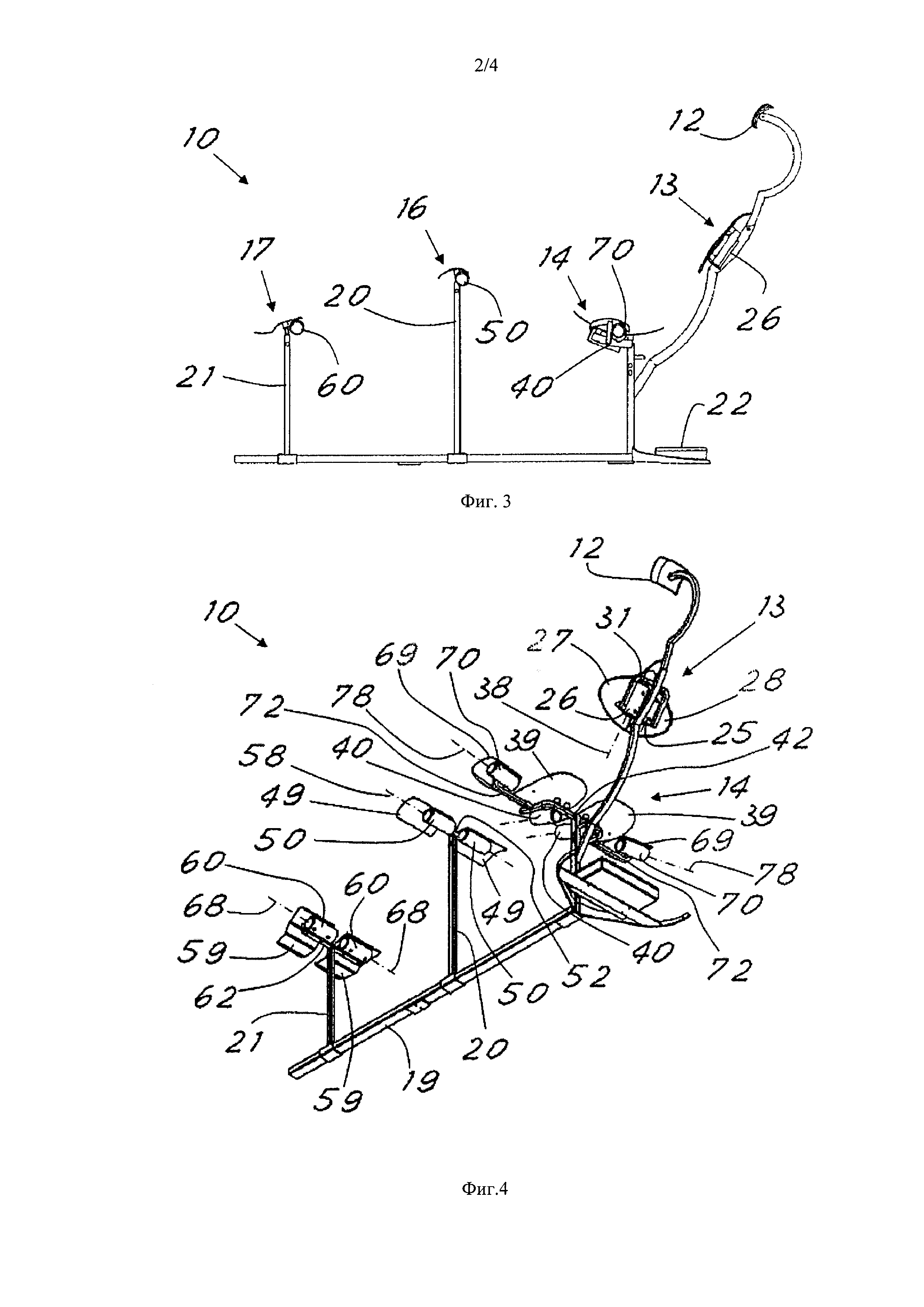
- Фиг. 3 представляет вид сбоку системы, изображенной на фиг. 1.
- Фиг. 4 представляет вид три четверти снизу системы, изображенной на фиг. 1.
- Фиг. 5 представляет схематически продольный разрез элемента системы, изображенной на фиг. 1, для опоры затылочной зоны.
- Фиг. 6 представляет схематически продольный разрез элемента системы, изображенной на фиг. 1, для опоры ягодичной зоны.
- Фиг. 7 представляет схематически поперечный разрез пары элементов системы, изображенной на фиг. 1, для опоры пяточных зон.
В соответствии с изображениями на фиг. 1 схематически представлен вид в перспективе вибрационной системы 10 согласно заявленному изобретению. Преимущественно, указанная система позволяет осуществлять корпоральную стимуляцию посредством создания проприоцептивного резонанса, что будет описано далее.
Система 10 содержит опорную структуру 11 для обеспечения опоры тела человека, содержащую следующие опорные элементы, расположенные таким образом, чтобы обеспечивать опору:
затылочной зоны - опорный элемент 12 затылочной зоны,
поясничной зоны спины - опорный элемент 13 поясничной зоны,
зоны ягодиц - опорный элемент 14 ягодиц,
зоны кистей рук - опорный элемент 15 рук,
подколенной зоны рук - опорный элемент 16 подколенной зоны.
и пяточной зоны рук - опорный элемент 17 пяточной зоны.
Все элементы опорной структуры соединены с рамой 18, располагающейся на полу и также обеспечивающей необходимое положение всех указанных опорных элементов. Преимуществом является то, что рама содержит опорные скобы, при помощи которых можно менять положение опорных элементов для пользователей с разными пропорциями тела. Причем, по меньшей мере, можно изменить продольное положение опорного элемента пяточной зоны и/или опорного элемента для затылочной зоны. В частности, к продольно расположенному основанию 19 (рамы 18) могут крепиться с возможностью перемещения и фиксации стойка 20 для опорного элемента 16 для подколенных зон и стойка 21 для опорного элемента 17 для пяточных зон соответственно.
Таким образом, существует возможность изменить расположение опорных элементов 16 и 17 как по отношению друг к другу, так и относительно сиденья, образованного опорными элементами 14.
Подобным образом, например, можно изменить положение опорного элемента 12 для затылочной зоны.
Положение полулежа тела пользователя схематично представлено на фиг. 2. Угол наклона тела позволяет распределить вес тела таким образом, чтобы и мышцы-антагонисты, и мышы-агонисты были полностью расслаблены. Такое положение препятствует сокращению мышц и способствует хорошей циркуляции венозной и артериальной крови и лимфы.
Описанная опорная структура позволяет осуществить опору тела в десяти определенных участках, контактирующих с опорой и соответствующих определенным подвижным суставам. С другой стороны, при таком положении отсутствует прямой контакт опоры с телом в области икроножных мышц, бедер, поясницы, плеч и шейно-воротниковой зоны, что препятствует нарушению кожного кровообращения, лимфатической циркуляции и сдавливанию мышечной массы.
Такой вид опорной структуры (исключительно для целей расслабления, без использования вибрации или иного вида движения) описан в заявке WO 2008/117330.
Однако было неожиданно обнаружено, что представленная опорная структура в сочетании с инновационными вибрационными системами подходит для создания вибрационной системы для передачи локализованных вибраций к участкам опоры, соответствующим различным частям тела и воздействующим на тело пользователя полностью, как будет описано ниже, приводя к чрезвычайно положительному результату.
Согласно сущности заявленного изобретения, вышеуказанные опорные элементы 13, 14, 15, 16, 17 содержат устройства для создания вибрации, соединенные с центральным контрольным устройством 22.
При этом опорный элемент 12 для затылочной зоны, преимущественно, не активен, то есть не содержит устройство для вибрации для избежания нежелательной, возможно болезненной, стимуляции в непосредственной близости к шейно-воротниковой зоне.
Передача вибрации осуществляется на десяти участках контакта тела с эргономичной опорной структурой. Важно, что указанные участки совпадают с ладонями обеих рук, правой и левой сторонами поясничного изгиба позвоночника, подколенными ямками и ахилловыми сухожилиями.
Предпочтительно, что также представлены наушники 23, соединенные с контрольным устройством для приема аудиосигналов, как будет описано далее. Указанное контрольное устройство может быть создано на основе любой из известных микропроцессорных систем, запрограммированной для управления электродвигателями и передачи синхронизированных аудиосигналов, как будет описано ниже.
Контрольное устройство 22 также может содержать устройство ввода 24, такое как, например, пульт управления 24 (проводной или безпроводной) для выбора программ и функций системы 10.
На фиг. 3 и фиг. 4 более детально представлены устройства, которые обеспечивают передачу вибрации к опорным элементам. В частности, каждый из вышеупомянутых опорных элементов 13-17 содержит верхнюю опорную поверхность (подходящей формы для обеспечения надежной опоры для определенной части тела), под которой расположено передающее вибрацию к опорной поверхности устройство.
Как преимущество, разные устройства для вибрации состоят из, по сути одинаковых частей, при этом их основные оси предпочтительно ориентированы в продольном или поперечном направлении по отношению к опорной структуре в зависимости от длины опорной поверхности опорного элемента и его расположения.
Предпочтительно, каждая опорная поверхность упруго крепится к раме 18 (при помощи изготовленных из упругого материала антивибрационных блоков) для создания вибрации без передачи вибрации к раме, таким образом предотвращая образование низко-частотных гармонических волн. Соответствующее устройство для вибрации прочно прикреплено к опорной поверхности, внутри него расположен электрический двигатель, приводящий в движение вал с эксцентриковым грузом, вращая его эксцентрически вокруг центральной оси устройства. Таким образом эксцентриковый вращающийся груз передает соответствующей опорной поверхности чередующиеся волнообразные колебания, частота которых зависит от скорости вращения управляемого контрольным устройством 22 электродвигателя. С помощью контрольного устройства, регулируя угол и направление вращения двигателя вперед или назад, можно регулировать амплитуду вибраций в пределах широкого диапазона значений.
Как правило, двигатели вибрационных устройств могут быть типа бесщеточных двигателей, малоинерционными, для возможности осуществления быстрого изменения скорости и направления вращения при управлении контрольным устройством 22.
Более того, для более эффективного управления, каждый двигатель может содержать датчик обратной связи для осуществления контроля движения контрольным устройством 22.
Двигателями (являющимися, преимущественно, низковольтными) можно с легкостью управлять, так чтобы создавать вибрации с контролируемой амплитудой и ускорением и заданной частотой, таким образом, существует возможность создания различных программ для системы в зависимости от проприоцептивной системы, подвергаемой стимулированию и резонансу.
Предпочтительно опорный элемент 13 для поясничной (или спинной) зоны разделен на две части, правую часть и левую часть, подвергающиеся колебаниям независимо друг от друга при помощи, соответственно, устройств 25 и 26 для вибрации поясничной зоны. Выяснили, что, для придания упругости и надежности в эксплуатации, как преимущество, две указанные части образованы единой опорной поверхностью с разделяющим ее на равные части углублением.
Как представлено на фиг. 1, опорная поверхность опорного элемента 13 поясничной зоны разделена на правую часть 27 и левую часть 28 опорной поверхности необходимой формы, при этом узкое углубление 29 проходит в продольном направлении по большей части опорного элемента 13 и заканчивается в верхней зоне 30, где правая и левая части 27 и 28 соединены. Соединительная часть сконструирована достаточно маленькой по размеру для обеспечения достаточно независимой друг от друга вибрации двух указанных частей, но, одновременно, достаточно прочной для обеспечения опоры поясничной части тела.
Для предотвращения возможного повреждения углубление 29, как правило, заканчивается круглым отверстием в непосредственной близости к зоне 30.
Как представлено на фиг. 4, две части, образующие опорный элемент 13, как правило, крепятся к раме при помощи прочного элемента 31 U-образной формы, при этом свободные концы элемента U направлены вниз параллельно опорной поверхности элемента 13. Каждая из двух смежных частей опорной поверхности - правая 27 и левая 28 - прикреплены к соответствующей стороне U-образного элемента, при этом изготовленные из упругого материала блоки расположены между U-образным элементом и частями 27 и 28 таким образом, что вибрация правой 27 и левой 28 частей осуществляется без передачи вибрации к раме.
Фиг. 5 иллюстрирует устройство 25 для вибрации для правой части 27 опорной поверхности элемента 13 (идентичное устройство 26 используется для вибрации для левой части 28 опорной поверхности элемента 13). Это изображение также демонстрирует один из упругих блоков 32, при помощи которого опорная поверхность крепится к раме.
В представленной предпочтительной структуре устройство 25 для вибрации содержит жесткий корпус 33, закрепленный при помощи винтов 34 и 35 под соответствующей правой частью 27 опорной поверхности. Корпус, преимущественно цилиндрической формы, содержит электродвигатель 36, на выходном валу которого эксцентриковый груз 37 расположен таким образом, чтобы его вращение осуществлялось вокруг оси 38, ориентированной параллельно правой части 27 опорной поверхности и вдоль оси тела пользователя. Преимущественно, балансировочный груз расположен на противоположном, по отношению к эксцентриковому грузу 37, конце выходного вала для предотвращения нежелательной деформации вала и уверенности в оптимальном управлении осцилляцией.
Как представлено на фиг. 4, два опорных элемента 14 для зоны ягодиц соединены на определенном расстоянии в горизонтальной плоскости, и каждый элемент содержит опорную поверхность 39 элемента 14 с закрепленным под ней соответствующим устройством 40 для вибрации зоны ягодиц.
Как детально показано на фиг. 6, демонстрирующей один из двух опорных элементов 14 (другой симметрично идентичен), опорные поверхности 39 упруго соединены с рамой, при этом между ними находятся эластичные прокладки 41 (на фиг. 6). Для этого, как правило, к раме крепится U-образный элемент 42, причем свободные концы элемента U-образного элемента ориентированы параллельно опорной поверхности 39 и вдоль оси тела пользователя, каждая из опорных поверхностей 39 расположена на соответствующей стороне U.
Как представлено на фиг. 6, устройство 40 для вибрации зоны ягодиц содержит преимущественно жесткий корпус 43, закрепленный при помощи винтов 44 и 45 под соответствующей опорной поверхностью 39. Корпус, преимущественно цилиндрической формы, содержит электрический двигатель 46, на выводном валу которого эксцентриковый груз расположен таким образом, чтобы его вращение осуществлялось вокруг оси 48, ориентированной параллельно опорной поверхности и вдоль оси тела пользователя. Как правило, балансировочный груз расположен на противоположном, по отношению к эксцентриковому грузу 47, конце выводного вала для предотвращения нежелательной деформации вала и уверенности в оптимальном управлении осцилляцией.
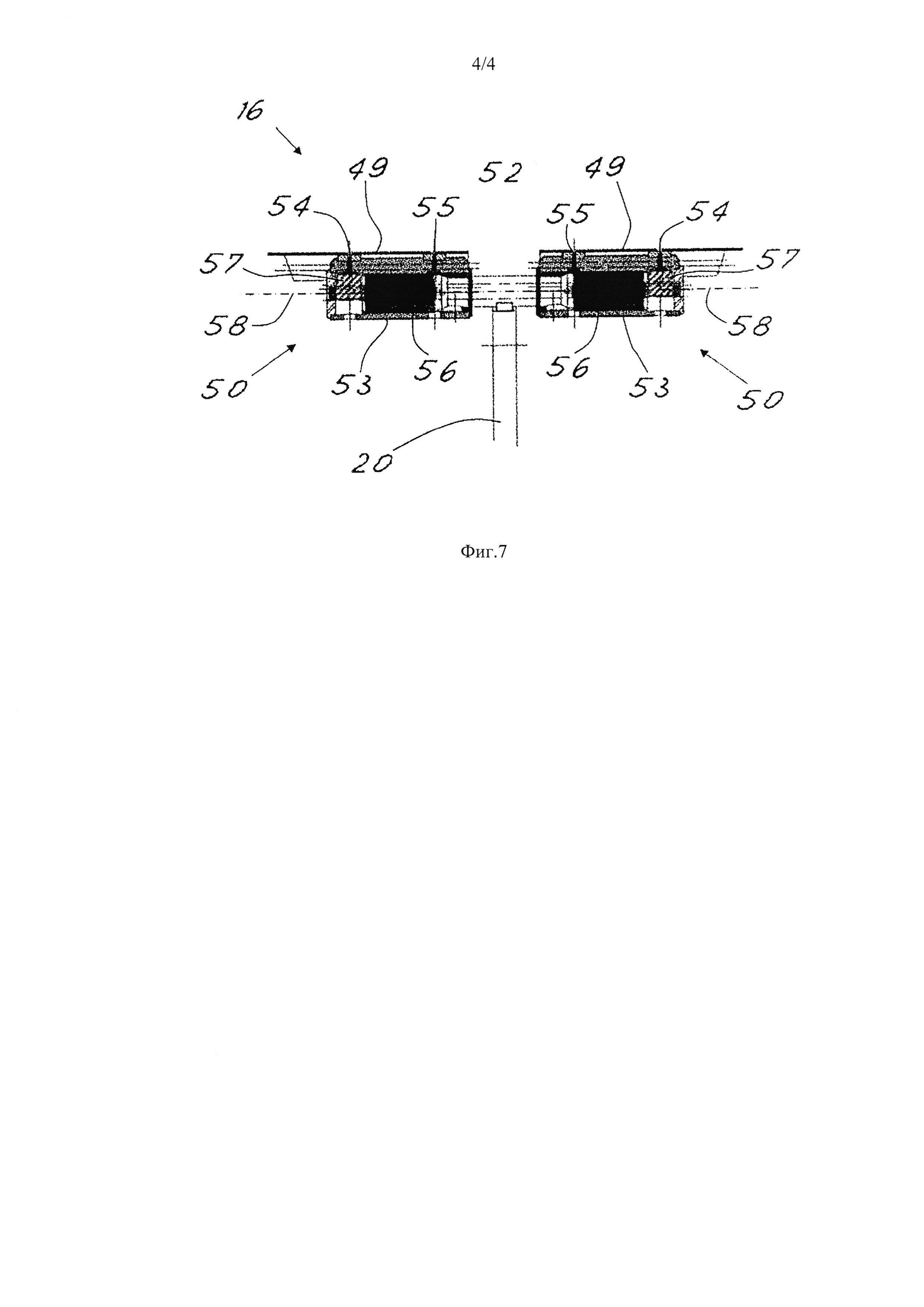
На фиг. 7 представлено возможное преимущественное воплощение опорных элементов 16 подколенной зоны, соединенных друг с другом в горизонтальной плоскости на определенном расстоянии. Каждый из указанных элементов содержит опорную поверхность 49 подходящей формы с закрепленным под ней устройством 50 для вибрации подколенной зоны. Опорная поверхность упруго закреплена (при помощи эластичных прокладок) на горизонтальном стержне 52 рамы, закрепленном, в свою очередь, на верхнем конце стойки 20.
Каждое устройство 50 для вибрации подколенной зоны содержит, как правило, жесткий корпус 53 преимущественно цилиндрической формы, закрепленный винтами 54 и 55 под соответствующей опорной поверхностью 49, и электрический двигатель 56, на выводном валу которого эксцентриковый груз 57 расположен таким образом, чтобы его вращение осуществлялось вокруг оси 58, ориентированной параллельно опорной поверхности и перпендикулярно продольной оси тела пользователя.
Как преимущество, балансировочный груз расположен на противоположном, по отношению к эксцентриковому грузу 57, конце выводного вала для предотвращения нежелательной деформации вала.
Как представлено на фиг. 7, опорные элементы 16 являются зеркальным отражением друг друга по отношению к вертикальной продольной плоскости структуры.
Как представлено на фиг. 4, два опорных элемента 17 для пяточной зоны соединены друг с другом в горизонтальной плоскости на определенном расстоянии, при этом каждый из указанных опорных элементов содержит опорную поверхность 59 подходящей формы, с закрепленным под ней устройством 60 для вибрации пяточной зоны. За исключением формы и расположения своих опорных поверхностей, опорные элементы 17, которые закреплены на концах горизонтального стержня 62, по существу аналогичны описанным выше опорным элементам 16, что понятно специалисту в данной области техники. Подобно опорным элементам 16, вращающиеся грузы опорных элементов 17 вращаются вокруг осей 68, параллельных опорным поверхностям 59 и перпендикулярных продольной оси тела пользователя.
Предпочтительно, опорные элементы 15 для кистей рук (рассматриваемые по отдельности) также подобны опорным элементам 16 и 17, за исключением формы опорных поверхностей (обозначены номером 69 на фиг. 4), и, следовательно, не будут описаны подробно. Указанные опорные элементы 15 предпочтительно закреплены на обеих сторонах U-образного элемента 42, являющегося опорой для элементов 14 для ягодичной зоны, при помощи части 72 рамы с упруго закрепленной пластиной 69 на ее обоих концах.
Соответствующее устройство 70 вибрации для кистей рук закреплено под опорной поверхностью 69, при этом ось 78 вращения эксцентрикового груза параллельна пластине и перпендикулярна телу пользователя.
Установлено, что скорость вращения эксцентрикового груза находится в диапазоне значений преимущественно между 1500 и 6000 оборотов в минуту в зависимости от механорецептора, подвергаемого стимуляции, и предполагаемого результата. Эксцентриковый груз может весить преимущественно от 10 до 25 грамм и, предпочтительно, от 15 до 18 грамм (в частности, около 17,23 г с эффективной массой эксцентрикового груза около 15,47 г).
Также установлено, если эксцентриковый груз имеет диаметр предпочтительно от 10 до 20 мм и, более предпочтительно, около 14 мм, при этом вращение груза осуществляется на расстоянии от 3 до 8 мм (в частности, около 4,5 мм) по отношению к его геометрической оси. Центр эксцентрикового груза может находиться, преимущественно, на расстоянии от 4 до 7 мм (в частности, около 5,75 мм) от геометрической оси эксцентрикового груза.
Обнаружено, что при описанном выше распределении вибрационных устройств на опорной структуре можно применять запрограммированные циклы вибрации, стимулирующий эффект которых передается - через сигнал, направляемый механорецепторами в центральную нервную систему и обратно к эфферентным зонам (эффект следования, навязывания) - ко всем частям тела, а не только к небольшим отдельным зонам, соответствующим точкам опоры. Также обнаружено, что особая структура вибрационных устройств в сочетании с их расположением и ориентацией в пространстве, несмотря на простоту, является весьма эффективной с точки зрения предотвращения, например, гармонических вибраций, уменьшающих общий положительный результат. Также установлено, что описанная структура вибрационных устройств является преимущественной для возможности использования программ вибрации, которые могут быть комплексными и, предпочтительно, синхронизированными при использовании экстероцептивной проприорецепции с синхронизированной модуляцией и звуками, передающимися через наушники. Осуществляемая посредством описанной системы проприоцептивная стимуляция оказывает почти мгновенный положительный эффект благодаря авторезонансу стимулируемых механорецепторов без помех и ослабления волн, присутствующих при ином распределении контактных и опорных зон тела пользователя.
Обнаружено, что определенное положение поверхностей опоры тела способствует созданию множественной фокусной вибрации, которая, посредством стимуляции кожных механорецепторов при возникновении эффекта следования, воздействует на участки цепочек мышц и другие органы тела человека, что нашло свое воплощение в описанном ниже способе стимуляции тела человека посредством создания проприоцептивного резонанса.
Структура вибрационной системы согласно заявленному изобретению позволяет контролировать частоту вибраций и, в частности, диапазон ускорения вибраций, и соответственно, посредством создания контролируемой вибрации с относительно небольшой амплитудой, оказывать точное воздействие на определенные участки без создания гармонической вибрации и без оказания нежелательного вибрационного негативного эффекта на структуры тела человека.
В описанной системе возможно создавать вибрации в диапазоне частот преимущественно от 15 до 150 Гц, в частности от 20 до 140 Гц, для достижения широкого спектра воздействия стимуляции. Например, в зависимости от выбранной программы и от планируемого результата можно генерировать частоты, направленные на создание различных реакций стимуляции так называемых телец Мейсснера воздействием частот от 20 до 60 Гц, в зависимости от поставленной задачи, или также частоты, направленные на создание резонанса так называемых телец Пачини воздействием частот от 90 до 110 Гц в зависимости от поставленной задачи.
Кроме того, в системе возможно обеспечивать различные амплитуды вибраций (например, в диапазоне от 1 до 4 мм) для того, чтобы получить необходимый результат стимуляции (например, около 1,5 мм для стимуляции телец Мейсснера и 2 мм для стимуляции телец Пачини).
Также доказано, что структура согласно заявленному изобретению исключительно подходит для регулирования ускорения в пределах широкого диапазона значений. Например, обнаружено, что применяют следующие значения ускорения: от 0 до 40 Гц в течение 2,5 сек для создания механической вибрации телец Мейсснера, ускорение от 0 до 40 Гц за 0,5 сек для активизации резонанса механорецепторов Мейсснера и значения от 0 до 90 Гц или от 0 до 110 Гц за 0,4 сек для активизации резонанса механорецепторов Пачини.
Также следует отметить, что при помощи заявленной вибрационной системы возможно реализовать и способ для стимуляции тела человека посредством создания проприоцептивного резонанса. А именно, способ характеризуется тем, что обеспечивают опору тела пользователя только в затылочной зоне, поясничной зоне, зоне ягодиц, зоне кистей рук, подколенной и пяточной зонах таким образом, что тело пользователя находится в положении полулежа, и осуществляют контролируемые вибрации указанных зон опоры посредством регулирования, за исключением в некоторых случаях затылочной зоны, частоты и амплитуды контролируемой вибрации.
При этом существует возможность воздействовать на кожную ткань, исключив воздействие вибрации на более глубокие ткани тела, благодаря размерам и параметрам двигателя и колебаний эксцентрикового груза в установленных пределах. Параметры контролируемых вибраций (частота, амплитуда, ускорение) выбирают при этом из указанных выше диапазонов. Поскольку действие указанной вибрации распределяется на участки, наиболее чувствительные к проприоцепции, ее рассматривают как особый активатор механорецепторов кожи, который не оказывает нежелательного влияния на внутренние части тела. Возможность контроля участка, в котором осуществляется активация, позволяет особо «активировать» различные механорецепторы для достижения разных результатов.
Посредством активации указанных телец, например, возможна стимуляция черепно-мозговой зоны, в частности нейронов, обладающих высоким энтероцептивным резонансом, называемых «зеркальными нейронами».
Наиболее очевидный из уже полученных в течение первой серии исследований положительный результат общей стимуляции механорецепторов Мейсснера заключается в полной реполяризации мышц, т.е. полном расслаблении мышц, воспринимаемом пользователем как общее ощущение «парения». Указанный эффект «парения» незамедлительно создает острое ощущение удовольствия, которое не является просто результатом стимуляции, а свидетельствует о полной независимости от телесного восприятия благодаря ингибированию нервно-мышечного синапса.
Примером положительных результатов, полученных при использовании описанной вибрационной системы и ее различных операционных возможностей, включая представленный способ стимуляции тела человека посредством создания проприоцептивного резонанса, является изменение скелетного каркаса тела, психическое и физическое расслабление, уменьшение напряжения мышц, укрепление мышц, улучшение мышечного тонуса, избавление от стресса, рост творческих способностей, улучшение спортивных результатов, снятие напряжения после активной деятельности, мышечное расслабление, снятие болей спины, ослабление суставных болей и улучшение лимфатической, венозной и артериальной циркуляции.
В памяти контрольного устройства могут храниться различные программы, которые можно выбирать при помощи устройства ввода, такого как, например, пульт управления. При необходимости можно сохранить дополнительные программы, используя необходимые известные данные и интерфейсы ввода программы (например, устройства считывания карт памяти, USB-флеш накопители, др.)
Каждая из сохраненных в контрольном устройстве программ может длиться, например, от 10 до 20 минут, в частности от 12 до 15 минут. Продолжительность воздействия вибрации на заданной частоте для достижения определенного результата может быть менее длительной, чем вся программа, например, с паузами между одним циклом вибрации заданной частоты и другим циклом, или с чередованием циклов одной частоты с циклами другой частоты, используемых для достижения различных результатов.
Следует отметить, однако, что максимальный положительный эффект вибрации достигается при воздействии на протяжении, как минимум, 8 минут и, предпочтительно, как минимум, 10 минут, но не более 20 минут, и, предпочтительно, не более 15 минут, в зависимости от реакции переносимости.
Использование указанного способа обеспечивает преимущественно полное вовлечение проприоцепции, включая экстероцептивную слуховую стимуляцию.
Сопровождающий голос и гармоничная модуляция, синхронизированная с вибрациями, способствуют отказу от терапии в результате подавления появления повторяющихся мыслительных образцов и негативных эмоциональных состояний.
Звукозаписи можно использовать и для лечения, и для инструктирования пользователя во время проведения сеанса. В контрольном устройстве могут храниться звуки и голоса (например, как аудио файлы или как синтезированные источники), передаваемые через наушники в зависимости от управляемой контрольным устройством программы, и синхронизированные с программой вибрации элементов опоры.
Преимущественно, что для одной (или каждой) программы, контрольное устройство сохранит в одной из своих памятей одну или больше таблиц данных, относящихся к подходящим диапазону ускорения, времени, амплитуде, частоте, и т.д., в соответствии с определенной программой.
Во время воспроизведения программы контрольное устройство может, таким образом, просто последовательно воспроизводить эти данные через определенные промежутки времени, выполняя запрограммированный цикл полностью.
В частности, для каждого двигателя можно запрограммировать следующие параметры: частоту механических колебаний, амплитуду вращения эксцентричного груза, величину ускорения, от 0 до желаемого, и длительность воздействия. Работа двигателей одновременно или по отдельности осуществляется в зависимости от планируемых результатов (таких как реполяризация, укрепление мышц, улучшение мышечного тонуса и т.п.)
Программирование различных параметров для воспроизведения определенной программы можно осуществлять на отдельном устройстве (например, персональном компьютере) и затем передавать на контрольное устройство, или можно использовать непосредственно пульт управления (снабженный интерфейсом ввода и вывода), что понятно специалисту в области техники.
На этой стадии понятно, каким образом решены заранее определенные задачи. Используя систему и способ, согласно заявленному изобретению, возможно, запрограммировав точное воздействие, эффективно осуществить стимуляцию кожных механорецепторов с достижением желаемого положительного результата.
Очевидно, что представленное выше описание воплощения заявленного изобретения, содержащего инновационные признаки, является примером применения указанных существенных признаков и, следовательно, не следует ограничивать объем прав заявленными признаками.
Например, систему можно укомплектовать более сложным контрольно-программируемым устройством, или дополнительными электродвигателями, или другими интерфейсами пользователя. Например, можно использовать вибрационные устройства для воздействия на мышцы живота, икроножные мышцы, квадрицепсы, и т.д. В частности, таким образом можно добавить еще шесть электродвигателей с вращающимися грузами.
Реферат
Группа изобретений включает вибрационную систему для корпоральной стимуляции и способ создания локализованной вибрации в теле пользователя для корпоральной стимуляции кожных механорецепторов, относится к области медицинской техники и предназначена для стимуляции механорецепторов. Вибрационная система для корпоральной стимуляции содержит опорные элементы для обеспечения опоры тела пользователя, расположенные таким образом, чтобы обеспечивать опору затылочной зоны, поясничной зоны, зоны ягодиц, зоны кистей рук, подколенной зоны и пяточной, и выполненные с возможностью котактирования тела пользователя, находящегося в положении полулежа, с опорными поверхностями только в указанных зонах. Опорный элемент для затылочной зоны выполнен с возможностью содержать, а каждый опорный элемент содержит соответствующее вибрационное устройство для передачи телу контролируемой вибрации при помощи электронного контрольного устройства посредством программного управления. Способ создания локализованной вибрации в теле пользователя для корпоральной стимуляции кожных механорецепторов посредством вибрационной системы обеспечивает опору тела пользователя только в затылочной зоне, поясничной зоне, зоне ягодиц, зоне кистей рук, подколенной и пяточной зонах таким образом, что тело пользователя находится в положении полулежа, и осуществляет контролируемые вибрации указанных зон опоры посредством регулирования, за исключением в некоторых случаях затылочной зоны, частоты и амплитуды контролируемой вибрации. Изобретения позволяют передавать контролируемые вибрации телу пользователя для достижения стимуляции центральной нервной системы через канал связи механорецепторов. 2 н. и 19 з.п. ф-лы, 7 ил.
Комментарии