Устройство устойчивости груза на внешней подвеске - RU195445U1
Код документа: RU195445U1
Чертежи


















Описание
[0001] Настоящая заявка испрашивает приоритет по предварительной заявке на патент США №62/627,920, озаглавленной SUSPENDED LOAD STABILITY SYSTEM THROUGH SELF POWERED AUTOMATED ELECTRIC DUCT FAN CONTROL и поданной 8 февраля 2018 г.от имени Derek Sikora и Jonathan Chung в качестве авторов изобретения, и предварительной заявке на патент США №62/757,414, озаглавленной LOAD STABILITY SYSTEM FOR SUSPENDED LOAD CHAOTIC MOTION и поданной 8 ноября 2018 г.от имени Caleb Carr, Derek Sikora и Logan Goodrich в качестве авторов изобретения. Вышеуказанные заявки включены в настоящий документ путем ссылки во всей своей полноте и для всех целей. «Информационный листок заявки», поданный с настоящим документом, является частью настоящей заявки, и все упоминаемые в нем приоритетные документы полностью включены в настоящий документ путем ссылки.
ОБЛАСТЬ ПОЛЕЗНОЙ МОДЕЛИ
[0002] Настоящее описание относится к усовершенствованным устройствам управления грузами на внешней подвеске.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ПОЛЕЗНОЙ МОДЕЛИ
[0003] Спасательные вертолеты обеспечивают быстрый доступ к пострадавшим или изолированным людям на море или суше. В большинстве случаев при наличии у пострадавших травм или необходимости оказания неотложной медицинской помощи местные или федеральные органы власти принимают решение использовать дорогостоящую операцию по подъему пострадавших в вертолет с помощью лебедки. Однако эти операции сопряжены с неблагоприятным воздействием ветра и других внешних факторов, которые приводят к вращению и раскачиванию троса спасательной лебедки. Такое раскачивание усложняет задачу, приводит к задержкам при оказании медицинской помощи и уже стало причиной гибели как спасателей, так и спасаемых.
[0004] В современных вертолетных операциях по подъему, спасанию и транспортировке грузов на внешней подвеске часто возникает неустойчивое опасное движение подвешенного человека или оборудования, которое ставит под угрозу проводимую операцию и, что более важно, участвующих в ней людей. Наблюдаемое движение можно сравнить с поперечным или коническим маятником, вращающимся вокруг точки поворота. До сих пор не обеспечен критичный для выполнения задачи параметр пригодности подъемной системы - надежная устойчивость движения троса подвески. Неуправляемое движение троса подвергает жизни опасности, ставит под угрозу успешное проведение операции, снижает возможности операции из-за факторов окружающей среды и значительно повышает эксплуатационные затраты.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0005] На фиг. 1 схематически проиллюстрирован раскачивающийся груз, подвешенный на вертолете и стабилизируемый устройством устойчивости груза (УУГ) на внешней подвеске.
[0006] На фиг. 2A проиллюстрирован изометрический вид устройства устойчивости груза на внешней подвеске с коробчатым корпусом в соответствии с одним вариантом осуществления.
[0007] На фиг. 2B проиллюстрирован вид спереди устройства устойчивости груза на внешней подвеске, содержащего шестиугольный центральный модуль и две консоли двигательной установки, в соответствии с одним вариантом осуществления.
[0008] На фиг. 3 проиллюстрирован вид в перспективе с частичным разрезом устройства устойчивости груза на внешней подвеске, демонстрирующий особенности конструкции в соответствии с одним вариантом осуществления.
[0009] На фиг. 4A-4C проиллюстрированы виды в перспективе, спереди и сбоку устройства устойчивости груза на внешней подвеске, содержащего аэродинамический корпус, в соответствии с одним вариантом осуществления.
[0010] На фиг. 5 проиллюстрирован центральный элемент конструкции устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
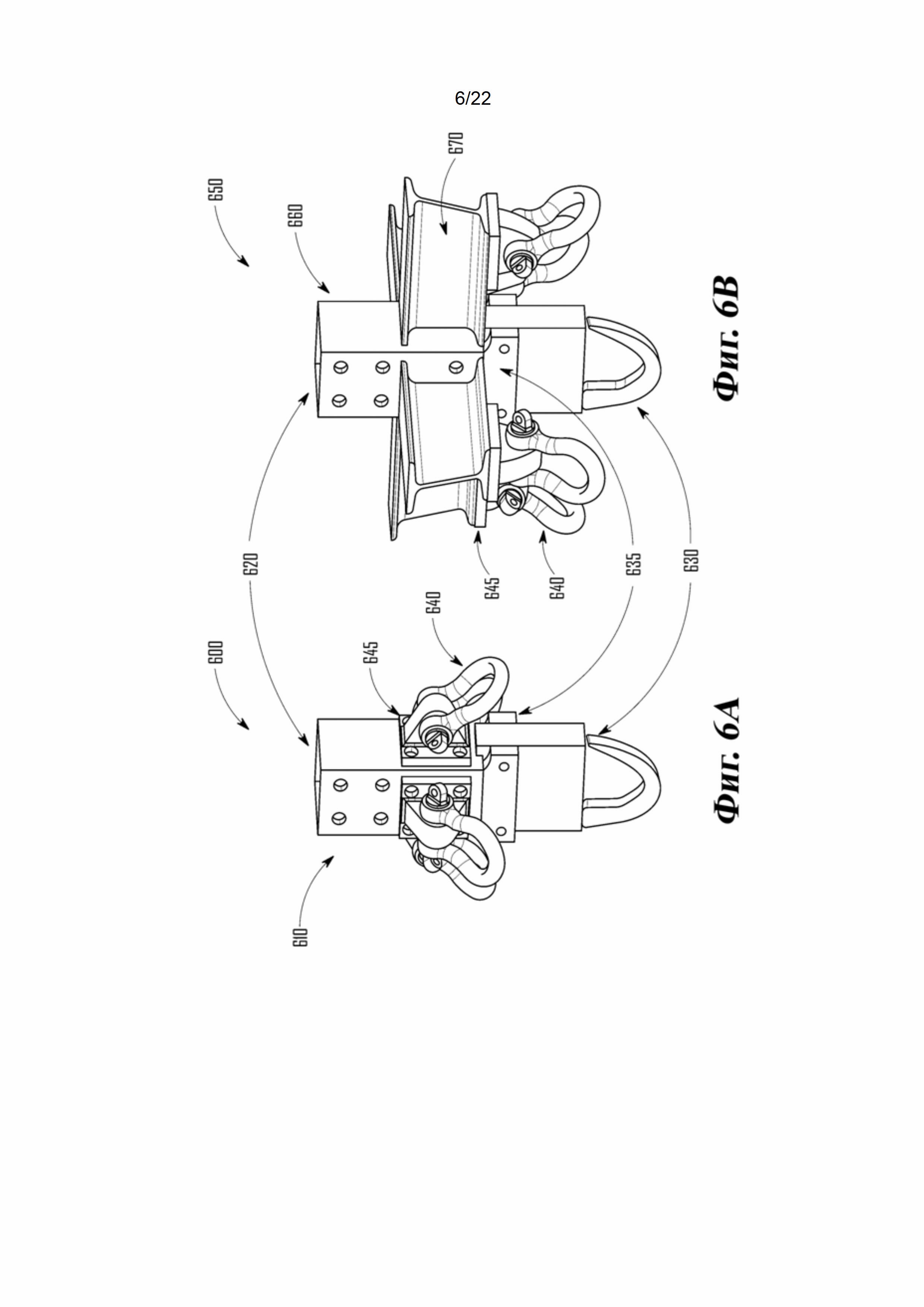
[0011] На фиг. 6A-6B проиллюстрированы два варианта втулок, которые присоединяют к центральному элементу конструкции для прикрепления груза, в соответствии с одним вариантом осуществления.
[0012] На фиг. 7A-7B проиллюстрирован центральный элемент конструкции, соединенный с каждым из двух вариантов втулок, для прикрепления груза в соответствии с одним вариантом осуществления.
[0013] На фиг. 8 проиллюстрирован вид в перспективе каркаса конструкции устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
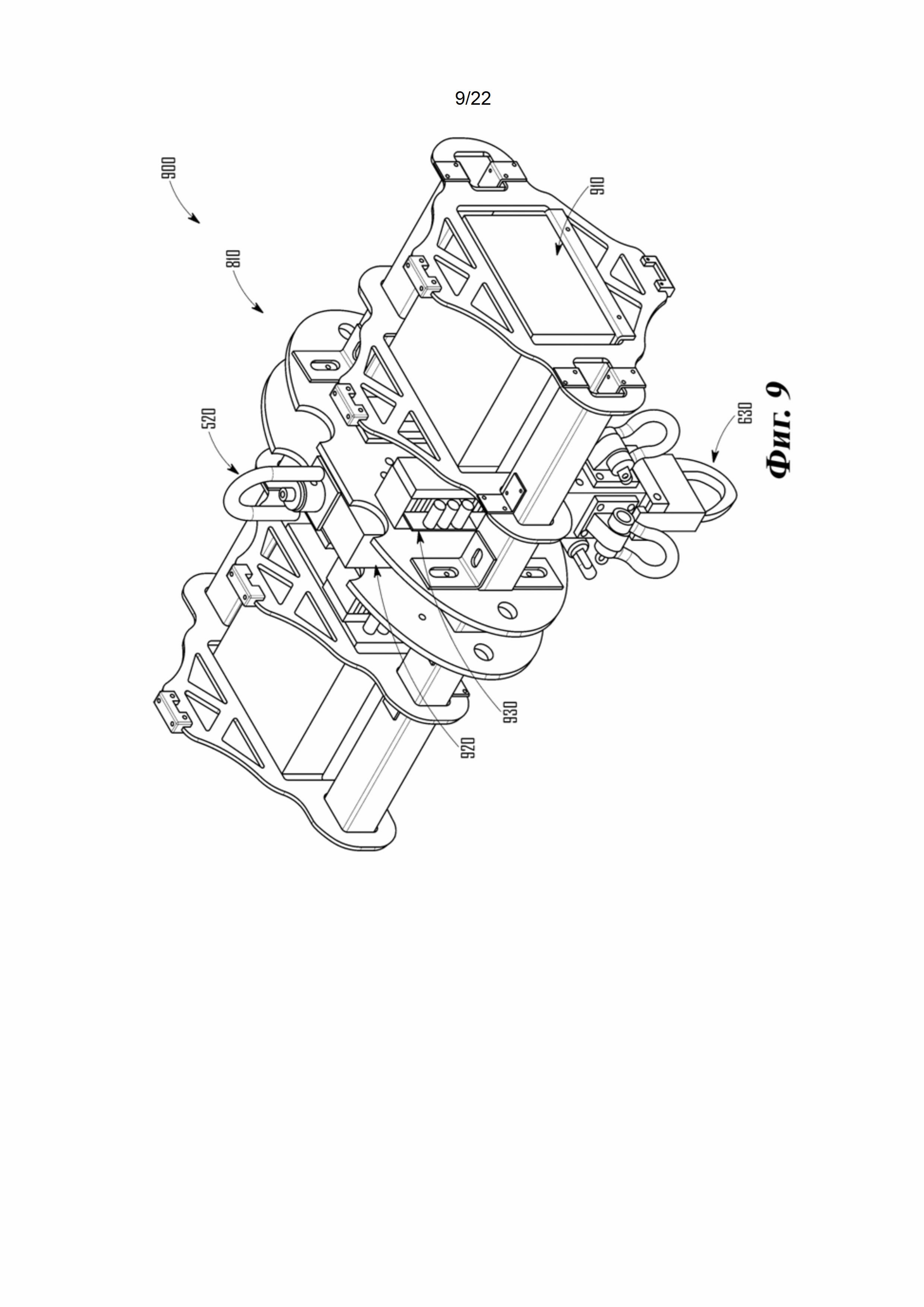
[0014] На фиг. 9 проиллюстрирован вид в перспективе компонентов, установленных в каркасе конструкции устройства устойчивости груза на внешней подвеске, в соответствии с одним вариантом осуществления.
[0015] На фиг. 10 проиллюстрирован вид в перспективе компонентов устройства устойчивости груза на внешней подвеске, установленных в каркасе конструкции, в соответствии с одним вариантом осуществления.
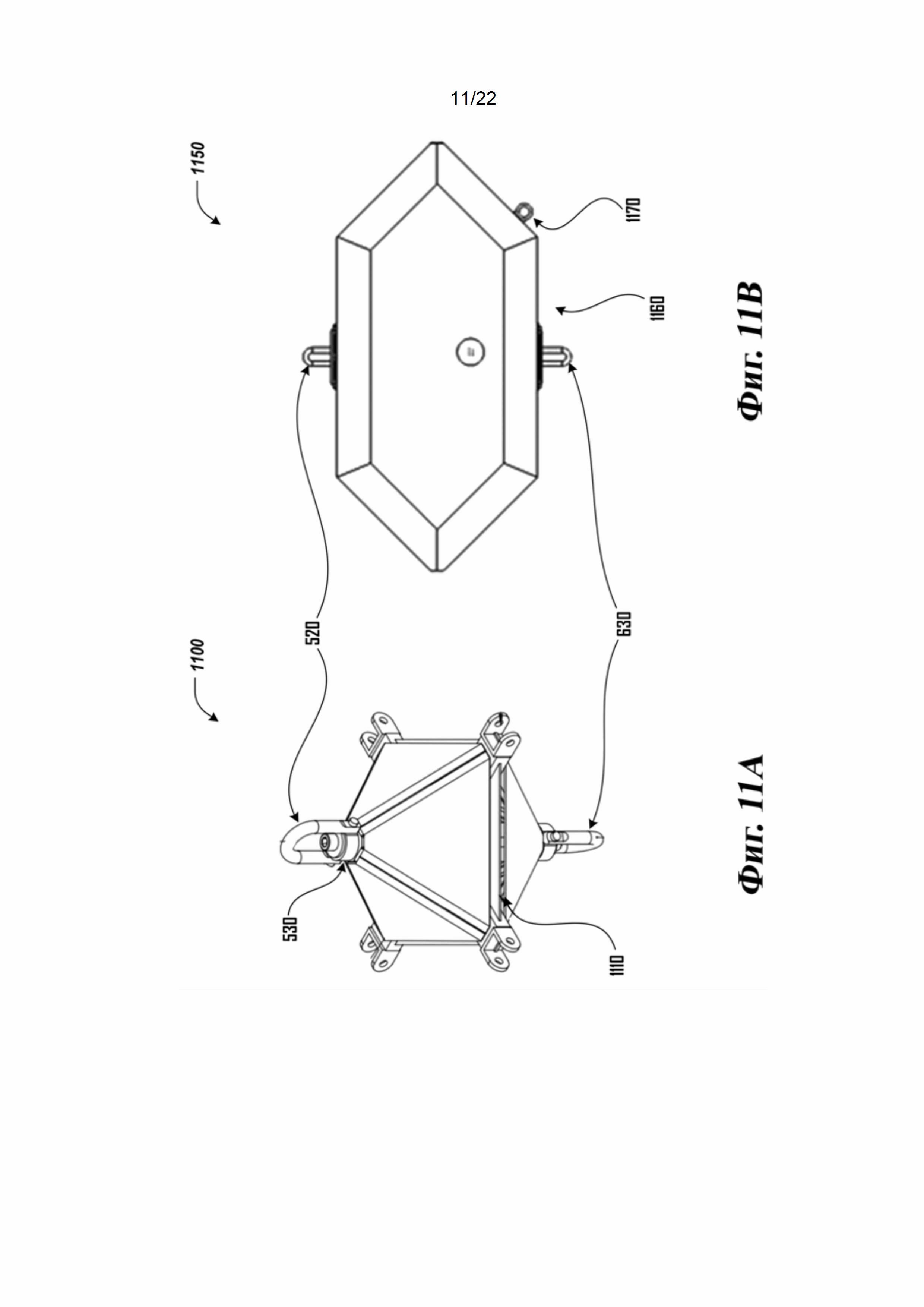
[0016] На фиг. 11A проиллюстрирован вид в перспективе варианта конструкции центрального модуля устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0017] На фиг. 11B проиллюстрирован вид спереди другого варианта конструкции центрального модуля устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0018] На фиг. 12A проиллюстрирован вид в перспективе двигателя, выполненного с возможностью использования в устройстве устойчивости груза на внешней подвеске, в соответствии с одним вариантом осуществления.
[0019] На фиг. 12B проиллюстрирован вид в перспективе двухдвигательной консоли двигательной установки устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0020] На фиг. 12C проиллюстрирован вид в перспективе опорного элемента для двухдвигательной консоли двигательной установки устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0021] На фиг. 12D проиллюстрирован изометрический вид другой двухдвигательной консоли двигательной установки устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
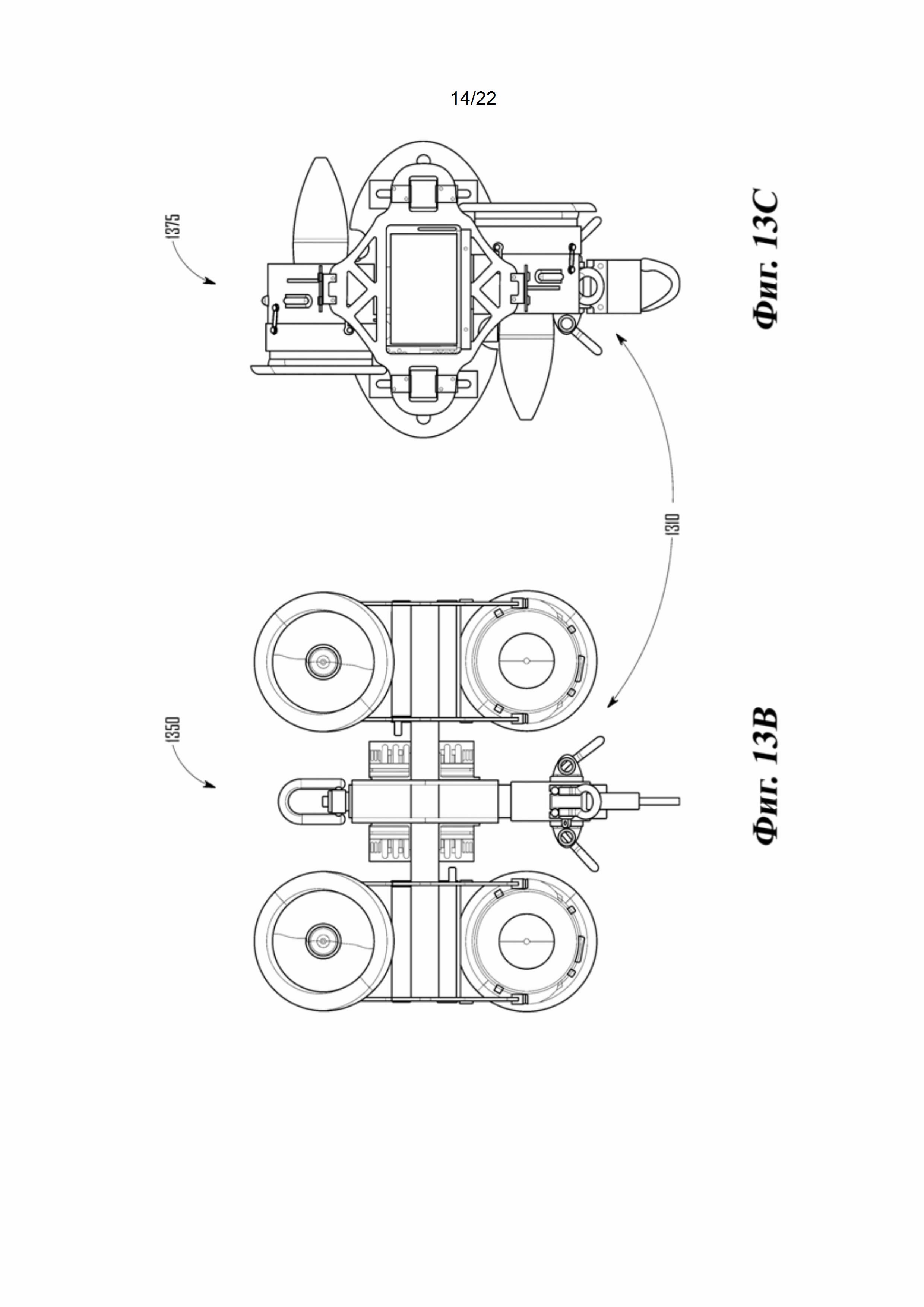
[0022] На фиг. 13A-13C проиллюстрированы виды в перспективе, спереди и сбоку двигателей, установленных в каркасе конструкции устройства устойчивости груза на внешней подвеске, в соответствии с одним вариантом осуществления.
[0023] На фиг. 14 проиллюстрирован вид в перспективе устройства устойчивости груза на внешней подвеске, включая датчики, установленные на аэродинамическом корпусе, в соответствии с одним вариантом осуществления.
[0024] На фиг. 15 схематически проиллюстрированы рабочие компоненты устройства устойчивости груза на внешней подвеске, включая удаленный интерфейс, в соответствии с одним вариантом осуществления.
[0025] На фиг. 16 проиллюстрирован вид в перспективе удаленного позиционного блока или целевого узла устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0026] На фиг. 17 проиллюстрирован вид в перспективе зарядной станции для устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0027] На фиг. 18 проиллюстрирована рабочая процедура устройства устойчивости груза на внешней подвеске, включая множество режимов или состояний ожидания команд, в соответствии с одним вариантом осуществления.
[0028] На фиг. 19 проиллюстрирована процедура принятия решения и управления устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0029] На фиг. 20A проиллюстрирован вид в перспективе верхнего кольца троса с внешними световыми индикаторами состояния устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0030] На фиг. 20B проиллюстрирован вид сверху световых индикаторов состояния устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0031] На фиг. 21 проиллюстрирован снимок экрана интерфейса управления для устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления.
[0032] На фиг. 22 проиллюстрирован график, на котором показано движение раскачивающегося груза и движение груза, стабилизированного устройством устойчивости груза на внешней подвеске.
ПОДРОБНОЕ ОПИСАНИЕ
[0033] Общий подход к управлению поведением раскачивающего груза заключается в установке средств противодействия на планере летательного аппарата или манипулировании самим планером летательного аппарата. Некоторые планеры летательных аппаратов, такие как Sky Crane, имеют систему направляющей, установленную под кабиной, для уменьшения раскачивания груза. Большинство предлагаемых подходов включают в себя установку алгоритмов автоматизированного противодействия в систему повышения устойчивости летательного аппарата. Действительно, командиры экипажа, которые остаются внутри вертолета во время эвакуации, будут пытаться манипулировать тросом, выталкивая и вытягивая его из кабины, т.е. предпринимать усилия, которые имеют ограниченный эффект.Все эти меры, как оказалось, недостаточны.
[0034] В различных вариантах осуществления, как описано далее в настоящем документе, эту проблему решает автономное автоматическое устройство управления устойчивостью груза на внешней подвеске. Устройство устойчивости груза (УУГ) по настоящему описанию препятствует движению груза на внешней подвеске путем противодействия двигателями, такими как высокоэффективные электрические туннельные вентиляторы (ЭТВ), в месте нахождения груза или около него. Следовательно, УУГ повышает безопасность операции благодаря полному освобождению пилота и экипажа от обязанностей по обеспечению устойчивости груза на внешней подвеске. Более того, диапазон эксплуатационных режимов полета для таких операций расширяется за счет добавления возможностей УУГ по динамическому управлению местоположением груза отдельно от движения летательного аппарата.
[0035] Устройство устойчивости груза управляет движением груза на внешней подвеске посредством автоматизированного устройства с автономным питанием, выполненного с возможностью отсоединения, на самом тросе между подъемной системой (т.е. вертолетом) и внешним грузом. Устройство не зависит от платформы, к которой подвешен груз (например, от характеристик «своего судна» вертолета), так как оно будет независимо определять динамику полета, необходимую для стабилизации груза. Это позволяет широко внедрять устройство независимо от типа летательного аппарата, сокращая расходы и снижая технологические риски.
[0036] Устройство устойчивости груза может обеспечивать преимущества при вертолетных поисково-спасательных операциях и перевозках грузов на внешней подвеске, тушении лесных пожаров с помощью вертолетов, крановых работах на установках для бурения нефтяных скважин, вспомогательных судах военно-морского флота, строительно-монтажных работах с помощью вертолета, глубоководном бурении, управлении космическим кораблем и тушении пожаров в гражданской сфере.
[0037] Обратимся теперь к подробному описанию вариантов осуществления, которые проиллюстрированы на чертежах. Хотя варианты осуществления описаны в связи с чертежами и соответствующими описаниями, это не означает ограничения объема вариантами осуществления, описанными в настоящем документе. Наоборот, это сделано с целью охватить все альтернативы, модификации и эквиваленты. В альтернативных вариантах осуществления могут быть добавлены или скомбинированы дополнительные устройства или комбинации проиллюстрированных устройств без ограничения объема вариантами осуществления, описанными в настоящем документе. Например, варианты осуществления, изложенные ниже, в основном описаны в контексте транспортировки грузов на внешней подвеске или поисково-спасательной операции с помощью вертолета. Однако эти варианты осуществления являются иллюстративными примерами и никоим образом не ограничивают описанную технологию каким-либо конкретным применением или платформой.
[0038] Фразы «в одном варианте осуществления», «в различных вариантах осуществления», «в некоторых вариантах осуществления» и т.п. используются многократно. Такие фразы не обязательно относятся к одному и тому же варианту осуществления. Термины «содержащий», «имеющий» и «включающий в себя» являются синонимами, если из контекста не следует иное. При использовании в настоящем описании и в прилагаемой формуле полезной формы единственного числа включают и множественное число, если из содержания текста явно не следует иное. Следует также понимать, что термин «или» по существу используется в его значении, включающем «и/или», если из содержания текста явно не следует иное.
[0039] На фиг. 1 схематически проиллюстрирован раскачивающийся груз, свисающий с вертолета 140 и стабилизируемый устройством устойчивости груза на внешней подвеске (УУГ) 110. К платформе 140 «своего судна» вертолета подвешен человек на тросе 120 из точки 130. Без использования УУГ 110 трос и подвешенный человек подвержены раскачиванию 150 в поперечном направлении и/или с совершением конического движения. При использовании УУГ 110 сильное раскачивание встречает противодействие и устраняется, так что человек может быть доставлен в требуемую точку или нужное местоположение 160.
[0040] УУГ может иметь разнообразные типоразмеры. На фиг. 1, 2A-2B, 3 и 4A-4C проиллюстрированы несколько разных компоновок и конструкций корпуса. В каждом из проиллюстрированных устройств используются две пары однонаправленных двигателей. В другом варианте осуществления устройство устойчивости груза может использовать двунаправленные двигатели в разных количествах или компоновках. Однако при описании иллюстративных вариантов осуществления необходимости в демонстрации таких деталей реализации нет.
[0041] На фиг. 2A проиллюстрирован изометрический вид 200 устройства устойчивости груза на внешней подвеске с коробчатым корпусом 210 в соответствии с одним вариантом осуществления. Устройство 210 полностью заключено внутрь коробчатой оболочки, обеспечивающей открытый доступ только для двигателей, троса и креплений груза, а также зарядных узлов. Хотя прямоугольный корпус устройства 210 не отличается особой аэродинамикой, он может содержать и защищать больший кубический объем, чем другие конструкции. Чем больше полезный внутренний объем, тем больше может быть энергоемкость (например, большее количество батарей или других источников питания), что позволяет устройству 210 обеспечивать более мощные двигатели и/или возможность более длительной работы до подзарядки или дозаправки.
[0042] На фиг. 2B проиллюстрирован вид 250 спереди устройства 260 устойчивости груза на внешней подвеске, содержащей шестиугольный центральный модуль и две консоли двигательной установки, в соответствии с одним вариантом осуществления. Устройство 260 обеспечивает улучшенный аэродинамический профиль по сравнению с устройством 210, изображенным на фиг. 2A. Устройство 260 также обеспечивает более компактное хранение или укладку и является более простой в техническом обслуживании за счет возможности снятия двух консолей двигательной установки. На фиг. 11B ниже проиллюстрировано устройство 260 с его снятыми консолями двигательной установки, а на фиг. 12B-12C проиллюстрированы съемные консоли двигательной установки.
[0043] На фиг. 3 проиллюстрирован вид 300 в перспективе с частичным разрезом устройства 310 устойчивости груза на внешней подвеске, демонстрирующий особенности конструкции в соответствии с одним вариантом осуществления. Устройство 310 состоит из внутреннего остова и внешней оболочки. Внешняя оболочка представляет собой легкий материал, такой как углеволокно, который окружает внутренний остов. Остов состоит из легкого сплава, подвергнутого машинной обработке. В вырезе или прозрачном корпусе вида 300 представлены различные внутренние компоненты и элементы конструкции. В число элементов конструкции входят горизонтальная балка конструктивного отсека, которая соединяется с C-образной консолью, поддерживающей электрические туннельные вентиляторные двигатели сверху и снизу горизонтальной балки конструктивного отсека. Сверху С-образных консолей находятся круглые датчики, аналогичные датчикам, описанным ниже со ссылкой на фиг. 14. Также ясно видна темная прямоугольная форма батареи с силовыми кабелями, прикрепленными для питания электрических туннельных вентиляторных двигателей.
[0044] В различных вариантах осуществления УУГ может питаться за счет комбинации бортовой и удаленной энергии. Во многих условиях все питание для УУГ находится на борту, что обеспечивает полностью автономную работу без зависимости от наличия внешних источников питания или средств доставки энергии. В некоторых ситуациях платформа, на которой подвешена УУГ, такая как вертолет или кран, может обеспечивать УУГ питанием по линии, проходящей вниз по тросу внешней подвески к УУГ. В некоторых других ситуациях платформа может снабжать питанием УУГ, которая содержит менее мощный источник питания или запас энергии на борту для периодического использования.
[0045] На фиг. 4A-4C проиллюстрированы виды в перспективе, спереди и сбоку устройства 410 устойчивости груза на внешней подвеске, включая аэродинамический корпус 420, в соответствии с одним вариантом осуществления. На фиг. 4C проиллюстрирован вид 400 в перспективе, на фиг. 4B проиллюстрирован вид 450 спереди и на фиг. 4C проиллюстрирован вид 475 сбоку.
[0046] Корпус 420 может быть сформирован из любого подходящего материала, такого как металл, пластмасса, армированная стекловолокном пластмасса или углеволокно. Тонкий и аэродинамичный профиль проиллюстрированного корпуса 420 обеспечивает минимальное сопротивление ветра, небольшую длину центральной балки, повышенную эффективность для двигателей, достаточный выступ для защиты от препятствий или их отклонения и простой доступ для технического обслуживания УУГ. Корпус может обеспечивать доступ во внутреннее пространство УУГ посредством люка с уплотнением или одной или более съемных панелей, позволяющих проводить техническое обслуживание и осмотр.
[0047] Дополнительные отличительные признаки и конструкция УУГ 410 описаны на последующих фигурах.
[0048] На фиг. 5 изображен вид 500, иллюстрирующий центральный элемент 510 конструкции устройства 410 устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Элемент 510 конструкции действует как основная работающая на растяжение балка, которая несет нагрузку. Поэтому он должен быть выполнен столь же прочным, как и трос, к которому его прикрепляют, и которого достаточно, чтобы выдерживать груз, подлежащий стабилизации с помощью УУГ. В различных вариантах осуществления элемент 510 конструкции основной балки может быть изготовлен из алюминия, стали или армированной углеволокном пластмассы в зависимости от требуемой прочности и типов груза, с которым, как ожидается, придется иметь дело. Например, поскольку углеволокно является неизотропным материалом, а помимо нагрузки растяжения грузы на внешней подвеске могут создавать быстрые мощные импульсы, которые могут распространяться вне оси, для такого применения лучше подойдут алюминий или сталь.
[0049] В верхней части элемента 510 конструкции имеется подъемное кольцо 520. Подъемное кольцо 520 может быть получено посредством машинной обработки из одного целого куска как часть элемента 510 конструкции или может быть также прикреплено болтами к верхней части элемента 510 конструкции. Подъемное кольцо 520 позволяет присоединять элемент 510 конструкции УУГ к объекту, например, тросу, проволоке или канату для подвешивания груза. Например, подъемное кольцо 520 может быть зацеплено крюком на конце такелажного ремня или троса с крана, стрелы, вертолета или другого подъемного устройства. В некоторых вариантах осуществления подъемное кольцо представляет собой крюк или другой механизм крепления в зависимости от необходимости.
[0050] Вращающаяся опора 530 позволяет подъемному кольцу 520 свободно вращаться под нагрузкой. Опора 530 может содержать, например, шариковое устройство сопряжения. Вращающаяся опора 530 на подъемном кольце 520 отделяет вращательную энергию из-за скручивания или наматывания подъемного троса от УУГ и внешнего груза. Это позволяет УУГ поворачиваться ниже подъемного троса, не подвергаясь воздействию какого-либо скручивания в тросе, так что УУГ может ориентироваться (например, поддерживая или изменяя ориентацию) в любом направлении, необходимом для стабилизации груза. Благодаря этому также уменьшается приложение скручивающих моментов от троса к грузу.
[0051] В проиллюстрированном варианте осуществления на нижней части элемента 510 конструкции предусмотрено средство 540 крепления, такое как отверстия под болт для прикрепления одного или более разных вариантов втулки, как проиллюстрировано ниже со ссылкой на фиг. 6A-6B и 7A-7B.
[0052] В некоторых вариантах осуществления вместо центрального элемента конструкции, к которому прицепляют трос с помощью крюка, в устройстве устойчивости груза предусмотрен механизм крепления троса для замыкания на тросе или вокруг него. Например, устройство устойчивости груза может содержать паз или щель для размещения троса и рычажный механизм для удержания троса или закрепления на нем. За счет приложения усилия к противоположным сторонам троса устройство устойчивости груза может быть надежно установлено на тросе выше груза. В некоторых вариантах осуществления такая зажимная система содержит колеса, которые обеспечивают давление на твердую поверхность, обеспечивая прижимную фиксацию. В некоторых вариантах осуществления колеса могут вращаться в прижатом состоянии, позволяя системе поднимать или опускать трос.
[0053] В вариантах осуществления с механизмом крепления троса для прикрепления устройства устойчивости груза в положении вдоль троса трос поддерживает груз непосредственно, а УУГ не устанавливают между концом троса и верхней частью груза. В таком случае УУГ удерживается на тросе, так что УУГ не несет вес груза. Варианты осуществления, в которых используется такой механизм крепления троса, соответственно, не требуют работающей на растяжение балки, проходящей через центр устройства устойчивости груза. Дополнительные допускающие вращение элементы могут позволять устройству устойчивости груза свободно вращаться вокруг троса, например, за счет вращения вокруг механизма, прикрепленного к тросу.
[0054] Зажимной механизм крепления троса обеспечивает простое сопряжение с существующими рабочими подъемными системами и системами внешнего груза и не требует непосредственного вмешательства в трос, используемый для подвешивания груза.
[0055] Детали реализации такого механизма крепления троса дополнительно представлены в предварительной заявке на патент США №62/627,920, озаглавленной SUSPENDED LOAD STABILITY SYSTEM THROUGH SELF POWERED AUTOMATED ELECTRIC DUCT FAN CONTROL и поданной 8 февраля 2018 г., которая включена в настоящий документ путем ссылки.
[0056] Что касается иллюстраций, то на фиг. 6A-6B проиллюстрированы два варианта втулок основной балки, которые присоединяют к центральному элементу 510 конструкции для прикрепления груза, в соответствии с одним вариантом осуществления. На фиг. 6A проиллюстрирован вид 600 в перспективе втулки 610 основной балки, содержащей грузовой крюк 630 и четыре дугообразные или D-образные серьги 640. Каждая серьга 640 установлена на держателе 645 серьги, закрепленном на втулке 610 основной балки. Грузовой крюк 630 прикреплен к втулке 610 основной балки с помощью переходной пластины 635. Управление грузовым крюком 630 может автоматически осуществляться (например, электронным образом) с помощью расцепного крюка, или автокрюка, такого как один или более удаленно приводимых в действие крюков, которые выполнены с возможностью дистанционного управления из кабины летательного аппарата или кабины крана с помощью нажатия кнопки. Крюк или крюки могут допускать вращение вокруг точки поворота или ограничивать вращение подвешенного объекта.
[0057] На фиг. 6B проиллюстрирован вид 650 в перспективе втулки 660 основной балки, также содержащей грузовой крюк 630 и четыре дугообразные или D-образные серьги 640. Втулка 660 основной балки также содержит четыре выступающие двутавровые балки 670, которые приварены или иным образом прикреплены к втулке 660 и к которым прикреплены держатели 645 серег.
[0058] На фиг. 7A-7B проиллюстрированы виды 700 и 750 сбоку соответственно центрального элемента 510 конструкции, прикрепленного к втулкам 610 и 660 основной балки каждого из двух вариантов соответственно для крепления груза, в соответствии с одним вариантом осуществления. На фиг. 7A и 7B представлено подъемное кольцо 520, установленное на своей вращающейся опоре 530 в верхней части элемента 510 конструкции, и грузовой крюк 630 в нижней части элемента 510 конструкции. В проиллюстрированных вариантах осуществления основная балка УУГ соединяется с грузом с помощью грузового крюка 630. В различных вариантах осуществления нижнее соединение может являться нижним подъемным кольцом или другим механизмом крепления, используемым, например, в современных полетных операциях.
[0059] В некоторых вариантах осуществления УУГ обеспечивает устройство сопряжения для подвешенных грузов, которое связывает движение УУГ и груза на внешней подвеске. Это означает, что в проиллюстрированных вариантах осуществления грузовой крюк 630 выполнен так, что он не поворачивается и не вращается независимо от элемента 510 конструкции основной балки; груз фиксирован к УУГ с возможностью вращения. В некоторых вариантах осуществления устройство сопряжения грузового крюка УУГ включает в себя выполненную с возможностью вращения соединительную деталь, аналогичную вращающейся опоре 530 подъемного кольца 520, на противоположном конце элемента 510 конструкции, так чтобы УУГ могло поворачиваться без необходимости во вращении груза под УУГ.
[0060] На фиг. 8 проиллюстрирован вид 800 в перспективе каркаса 810 конструкции устройства 410 устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Как и на предшествующих фигурах, на фиг. 8 представлен элемент 510 конструкции основной балки с подъемным кольцом 520 и вращающейся опорой 530 в верхней части и с втулкой 610 основной балки, содержащей серьги 640 и переходную пластину 635 крюка, в нижней части. Каркас 810, соединенный с элементом 510 конструкции, содержит пару ребер 820 овального профиля, которые поддерживают горизонтальные лонжероны 825. Горизонтальные лонжероны 825 образованы из полых труб и могут быть, например, выполнены из углеволокна.
[0061] Горизонтальные лонжероны 825, в свою очередь, соединены с монтажными ребрами 830 двигателя, установленными параллельно ребрам 820. Монтажные ребра 830 двигателя содержат на своих верхних и нижних концах точки 840 механизма крепления для прикрепления двигателей к каркасу 810. Кроме того, монтажные ребра 830 двигателя выполнены с центральным отверстием для приема источника питания, такого как батарея на поддоне 850 для батарей.
[0062] На фиг. 9 проиллюстрирован вид 900 в перспективе компонентов, установленных в каркасе 810 конструкции устройства 410 устойчивости груза на внешней подвеске, в соответствии с одним вариантом осуществления. В проиллюстрированном варианте осуществления поддон 850 для батарей, изображенный на фиг. 8, заполнен источником питания, таким как батарея 910. Источник питания может представлять собой один блок питания или набор элементов батареи, соединенных проводами последовательно и/или параллельно, таких как литий-полимерные (LiPo) элементы. Батареи 910 могут быть извлечены из поддона 850 для батарей для облегчения осмотра. Батареи могут заряжаться, когда они установлены в УУГ (т.е. их не нужно извлекать), посредством узлов на УУГ 410, которые соединяются с зарядной док-станцией. Канал передачи данных позволяет микроконтроллерному блоку или процессору контролировать информацию о питании, в том числе (без ограничений) напряжение элемента и рассеяние или потребление энергии в режиме реального времени.
[0063] Кроме того, к основной балке прикреплена вспомогательная батарея 920. Вспомогательная батарея 920 позволяет, например, устойчиво подавать питание на процессор, даже если двигатели потребляют чрезмерное количество энергии от основных батарей 910.
[0064] Контроллер 930 двигателей позволяет процессору управлять скоростью, потреблением энергии и тягой двигателей. Контроллер 930 двигателей может быть, например, электронным контроллером скорости (ЭКС) для электрического туннельного вентилятора (ЭТВ). ЭКС обычно имеет по меньшей мере три соединения: с источником питания, с двигателем и с процессором или микроконтроллером либо с обоими. ЭКС получает энергию от источника питания и распределяет ее на двигатели для управления объемом энергии, которая должна быть подана на двигатели.
[0065] На фиг. 10 проиллюстрирован вид 1000 в перспективе компонентов устройства 410 устойчивости груза на внешней подвеске, установленных в каркасе 810 конструкции, в соответствии с одним вариантом осуществления. В проиллюстрированном варианте осуществления процессор 1010 или центральный процессор (ЦП) установлен в центре внутри каркаса 810.
[0066] Процессор 1010 может являться встроенной системой, содержащей одноплатный компьютер и один или более микроконтроллерных блоков (МКБ). ЦП и МКБ содержатся внутри, например, буквально в черном ящике, где выполнены все соединения каналов данных. Черный ящик изготовлен из износостойкого пластика или полимера, защищающего систему от факторов окружающей среды и производственных факторов, таких как погодные и другие условия эксплуатации. В некоторых вариантах осуществления ЦП и МКБ установлены на одной печатной плате (ПП).
[0067] Внутри каркаса 810 также установлен беспроводной приемопередатчик 1020, который может представлять собой отдельные передатчик и приемник, а также антенна для беспроводной связи. Приемопередатчик 1020 и/или антенна беспроводной связи могут быть также установлены или напечатаны на той же печатной плате, что и процессор 1010.
[0068] В варианте осуществления, проиллюстрированном на фиг. 10, векторный навигационный блок 1030 включает в себя блок инерциальных датчиков (БИД). БИД подает на процессор 1010 данные инерциальной навигации и установлен в центре внутри каркаса 810 рядом с процессором 1010.
[0069] Некоторые варианты осуществления устройства устойчивости груза являются модульными. Например, УУГ может быть разделено на центральный модуль и двигатели или узлы консолей двигателей. На фиг. 11A проиллюстрирован вид 1100 в перспективе варианта конструкции 1100 центрального модуля устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Для достижения требуемой тяги, регулируемой по величине и направлению, центральный модуль 1110 УУГ может быть выполнен минимум с 2 консолями двигателей УУГ (такими как консоли двигателей, проиллюстрированные на фиг. 12D снизу) и максимум с 4. Как и в других вариантах осуществления УУГ, система 1110 имеет автономное питание и является полностью беспроводной благодаря точкам доступа к среде передачи для Bluetooth, Wi-Fi и/или радиочастотной (РЧ) передачи и приема.
[0070] На фиг. 11B проиллюстрирован вид 1150 спереди другого варианта конструкции центрального модуля устройства 1160 устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Центральный модуль 1160 УУГ содержит механизм аварийного выключения, содержащий стержень 1170 аварийного выключения. Стержень 1170 может быть подключен к линии. Таким образом, стержень 1170 можно потянуть, чтобы вызвать аварийное отключение УУГ. Внутри центрального модуля датчик присутствия стержня отключения распознает положение стержня 1170, чтобы определить, присутствует ли он. Устройство 1160 может работать лишь в присутствии стержня 1170. Если стержень 1170 отсутствует, устройство 1160 не будет приводиться в действие. Стержень 1170 может быть повторно установлен путем его помещения в отверстие для стержня.
[0071] На фиг. 12A проиллюстрирован вид 1200 в перспективе двигателя 1210, выполненного с возможностью использования в устройстве устойчивости груза на внешней подвеске, в соответствии с одним вариантом осуществления. УУГ содержит двигатели 1210, соединенные с центральным модулем. Эти двигатели 1210 толкают текучую среду, такую как воздух, вода или газ, в каком-либо направлении, чтобы обеспечить перемещение. Например, двигатель 1210 может включать в себя туннельный вентилятор, содержащий электродвигатель, который поворачивает лопасти ротора. Лопасти ротора содержатся внутри аэродинамического кожуха или воздуховода, через который выталкивается текучая среда. В случае вентилятора текучая среда представляет собой воздух, проталкиваемый за лопасти ротора, создавая таким образом тягу.
[0072] Воздух захватывается через впускное отверстие в передней части устройства. В некоторых вариантах осуществления лопасти двигателя 1210 могут вращаться в обоих направлениях, что делает тягу двунаправленной. Как и другие средства приведения в движение текучей среды, двунаправленные двигатели могут толкать воздух как в переднем, так и в заднем направлениях. В различных вариантах осуществления ребра, сформованные в корпусе двигателей, помогают формировать оптимальный направленный поток воздуха, ортогональный поперечному сечению лопастей, т.е. в продольном направлении двигателя 1210.
[0073] На фиг. 12B проиллюстрирован вид 1225 в перспективе двухдвигательной консоли 1230 двигательной установки устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Консоль 1230 двигательной установки совместима, например, с центральным модулем 1160 УУГ, изображенным на фиг. 11B выше, или с устройством 260 устойчивости груза, изображенным на фиг. 2B выше. Некоторые двигатели более эффективны при формировании тяги в переднем направлении, чем в заднем. Поэтому вентиляторы могут быть ориентированы так, чтобы основные векторы тяги были направлены в противоположные стороны, как проиллюстрировано на консоли 1230 двигательной установки.
[0074] В проиллюстрированном варианте осуществления УУГ может быть выполнено с возможностью разделения на модульные блоки. Двигатели 1210 могут отсоединяться от консолей 1230, чтобы их было проще хранить, а консоли 1230 могут отсоединяться от центрального модуля 1160. Например, каждая из комбинаций двигателей и консолей может быть высвобождена и отсоединена от центрального модуля 1160 с помощью высвобождающего штока нажимной кнопки и электрического интерфейса.
[0075] На фиг. 12C проиллюстрирован вид 1250 в перспективе опорного элемента для двухдвигательной консоли 1260 двигательной установки устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Проиллюстрированный опорный элемент присоединяют вокруг двигателя 1210, и он позволяет соединять двигатель 1210 с центральным модулем 1260. Аналогичный опорный элемент, который устанавливают вокруг двигателя 1210, как проиллюстрировано на фиг. 3 сверху.
[0076] На фиг. 12D проиллюстрирован изометрический вид 1275 другой двухдвигательной консоли 1280 двигательной установки устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Консоль 1280 двигательной установки совместима, например, с центральным модулем 1110 УУГ, изображенным на фиг. 11A выше. Консоль 1280 двигательной установки выполнена с возможностью складывания для упрощения хранения и развертывания. В развернутом состоянии консоль 1280 двигательной установки параллельна горизонтальной плоскости центрального модуля 1110 УУГ. Консоль выполнена с возможностью развертывания от 0 до 90 градусов посредством, например, ручного, подпружиненного или оснащенного двигателем устройств сопряжения.
[0077] На фиг. 13A-13C проиллюстрированы виды в перспективе, спереди и сбоку двигателей, установленных в каркасе конструкции устройства устойчивости груза на внешней подвеске, в соответствии с одним вариантом осуществления. На фиг. 13A проиллюстрирован вид 1300 в перспективе, на фиг. 13B проиллюстрирован вид 1350 спереди и на фиг. 13C проиллюстрирован вид 1375 сбоку. В различных вариантах осуществления двигатель 1210 содержит механизм 1320 для соединения с точками 840 механизма крепления двигателя на ребрах 830. В некоторых вариантах осуществления двигатели 1210 могут прикрепляться и отсоединяться без использования инструментов. В некоторых вариантах осуществления на наружной стороне двигателя 1210 имеются резьбовые отверстия, расположенные напротив друг друга симметрично относительно центра тяжести кожуха вентилятора, с помощью которых можно надежно прикрепить болтами консоли двигательной установки к двигателю 1210.
[0078] Двигатели могут быть соединены с помощью проводов, объединенных в один кабель. Провода заканчиваются разъемом, таким как, без ограничений, многополюсный ударопрочный разъем, например EC5. Гнездовая соединительная сторона находится на центральном модуле УУГ, например, в точках 840 механизма крепления двигателя на ребрах 830, а штепсельная сторона находится на стороне двигателя 1210, например, связана с механизмом 1320 или расположена рядом с концом консоли двигательной установки УУГ.
[0079] На фиг. 14 проиллюстрирован вид 1400 в перспективе устройства 410 устойчивости груза на внешней подвеске, включая датчики, установленные на аэродинамическом корпусе 420, в соответствии с одним вариантом осуществления. Матрица датчиков УУГ может представлять собой инерциальную систему измерения, систему определения ориентации и систему определения абсолютного положения. Инерциальная система измерения (ИСИ) может включать в себя имеющие 3 степени свободы (3СС) акселерометры, гироскопы и гравитационные датчики, которые могут представлять собой датчики микроэлектромеханических систем (МЭМС). Система определения ориентации может содержать магнометр или магнитометр, такой как компас, инклинометр, направленный кодер и радиочастотная система курсового угла. Система определения абсолютного положения может включать в себя датчики 1430 глобальной системы определения местоположения (GPS).
[0080] Матрица датчиков может дополнительно содержать датчик приближения или лазерную систему 1410 обнаружения и измерения дальности (LIDAR) (например, ротационную или линейную) и/или оптический датчик 1420, такой как одна или более камер или инфракрасных (ИК) датчиков. Датчики приближения могут включать в себя датчики высоты земной поверхности. Оптические датчики могут быть размещены со всех сторон оболочки и обращены во все направления. Оптические датчики могут также обеспечивать визуальную информацию для пользователя. Эта информация передается процессором УУГ по кабелю канала передачи данных и/или посредством беспроводного приемопередатчика. Датчики приближения и оптические датчики позволяют системе получать информацию об обстановке вокруг них на 360 градусов и избегать столкновений за счет обнаружения препятствий (например, часть кроны дерева) и изменения курса УУГ для препятствий. Устройство также выполнено с возможностью передачи по каналу обратной связи данных о положении над сушей (или водой) пилоту и экипажу летательного аппарата.
[0081] В число дополнительных датчиков УУГ могут входить датчик деформации для измерения нагрузки на центральный элемент 510 конструкции, ротационный кодер или датчик скорости двигателя 1210, который может быть инкрементальным или абсолютным, и датчик присутствия стержня 1170 отключения.
[0082] УУГ может также использовать удаленные датчики положения или маяки, удаленные вычислительные устройства или приемопередающие устройства целевых узлов для помощи в представлении движения платформы подвешивания (например, самого вертолета), УУГ и груза на внешней подвеске, а также целевого местоположения интересующего объекта, такого как человек, которого нужно спасти, или места назначения груза.
[0083] Процессор 1010 УУГ применяет алгоритмы к принимаемым данным системы датчиков, чтобы получить требуемый отклик системы. Например, для улучшения определения абсолютного положения датчик GPS может быть усовершенствован с помощью алгоритмов кинематики реального времени (КРВ). Измерения объединяются посредством методов нелинейного слияния данных, таких как методы калмановской фильтрации, для получения оптимальных оценок состояния во всех степенях свободы с целью точного описания местоположения и движения устройства в геодезическом пространстве.
[0084] На фиг. 15 схематически проиллюстрированы рабочие компоненты устройства 410 устойчивости груза на внешней подвеске, включая удаленный интерфейс 1550, в соответствии с одним вариантом осуществления. Внутри устройства 410 имеется набор 1505 датчиков, в который могут входить датчики 1506 положения, датчики 1507 ориентации, инерциальные датчики 1508, датчики 1509 приближения, датчики 1510 опорного местоположения и датчики 1511 тяги. Средства 1520 обработки УУГ включают в себя процессор 1010 и микроконтроллеры. Память 1525 УУГ по существу включает в себя оперативное запоминающее устройство (ОЗУ) и постоянное физическое запоминающее устройство, такое как твердотельный накопитель, и содержит навигационные системы 1526, целевые данные 1527 и информацию 1528 о режиме или состоянии ожидания команд. В число систем 1530 связи входят беспроводные системы 1531, такие как беспроводной приемопередатчик 1020, и проводные системы 1532. Вывод 1515 УУГ включает в себя управление 1516 двигателями посредством контроллеров 930 двигателей. Системы 1540 управления питанием регулируют и распределяют подачу энергии от, например, батарей 910. Различные внутренние системы и логические компоненты УУГ соединены шиной данных.
[0085] Интерактивный дисплей или удаленный интерфейс 1550 представляет собой вычислительный блок, который может получать автономное питание или может быть реализован аппаратно в планере летательного аппарата. Интерактивный дисплей 1550 получает данные от УУГ, например, беспроводным образом. Данные от УУГ отображаются на интерактивном дисплее 1550; вычислительные данные подвергаются синтаксическому анализу и преобразуются в визуальные подсказки. Интерактивный дисплей также передает оператору УУГ информацию о желательных состояниях ожидания команд, как описано ниже.
[0086] Интерактивный дисплей или удаленный интерфейс 1550 обменивается данными с УУГ 410 посредством систем 1570 связи, которые могут быть беспроводными 1571 или проводными 1572. Выходные данные 1560 от удаленного интерфейса 1550 могут содержать информацию, отображаемую на экране 1561, и звуковые подсказки 1562. Входные данные 1565 на удаленный интерфейс 1550 для управления УУГ могут содержать команды, подаваемые через сенсорный экран 1566 или посредством джойстика 1567. В различных вариантах осуществления удаленный интерфейс 1550 может содержать одно или более физических и/или логических устройств, которые в совокупности обеспечивают функциональные возможности, описанные в настоящем документе.
[0087] Аспекты устройства могут быть осуществлены в специализированном или специально предназначенном вычислительном устройстве или в процессоре данных, которые специально запрограммированы, сконфигурированы или сконструированы для выполнения одной или более из выполняемых компьютером команд, подробно описанных в настоящем документе. Аспекты устройства также могут быть реализованы на практике в распределенных вычислительных средах, где задачи или модули выполняются удаленными устройствами обработки, которые связаны посредством сети связи, такой как локальная вычислительная сеть (ЛВС), глобальная вычислительная сеть (ГВС) или Интернет.В распределенной вычислительной среде модули могут быть размещены как в локальных, так и в удаленных устройствах хранения информации. Как схематически проиллюстрировано на фиг. 15, устройство 410 устойчивости груза и удаленный интерфейс 1550 соединены проводной или беспроводной сетью.
[0088] На фиг. 16 проиллюстрирован вид 1600 в перспективе удаленного позиционного блока или целевого узла устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Удаленный позиционный блок или целевой узел содержит внешний комплект датчиков или маяк, который выполнен с возможностью обмена данными беспроводным образом с УУГ в качестве опорной точки позиционирования. Если УУГ рассматривается как первичный комплект датчиков, местоположением вторичного комплекта датчиков может быть платформа, на которой подвешен трос, а местоположением третичного комплекта датчиков может быть искомое местоположение для груза (например, для позиционирования с целью получения или доставки груза).
[0089] Удаленный позиционный блок может содержать приемопередатчик положения, выполненный с возможностью обмена данными с УУГ посредством ее беспроводного приемопередатчика 1020, и обеспечивает опорную точку позиционирования. Например, удаленный позиционный блок может быть прикреплен к самому вертолету или крану, под которым подвешен груз.
[0090] В некоторых вариантах осуществления удаленный позиционный блок или целевой узел представляет собой черный ящик 1610, изготовленный из прочного полимера или пластика, достаточно большой, чтобы помещаться в руке. Ящик 1610 имеет внешнюю антенну 1620 сбоку или в верхней части ящика. Удаленный позиционный блок может быть прикреплен, например, к вертолету с помощью магнитов, болтов или любого другого механизма крепления. Целевой узел может быть сброшен в местоположение на суше или прикреплен, например, к спасательному кругу или другому надувному спасательному средству, спасателю, поднимаемому грузу, месту для доставляемого груза или относящемуся к операции конкретному месту.
[0091] На фиг. 17 проиллюстрирован вид 1700 в перспективе зарядной станции для устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. В некоторых вариантах осуществления УУГ можно хранить и заряжать в зарядной станции в стационарном местоположении или на борту планера летательного аппарата для простоты и удобства. Зарядная станция 1710 может работать от имеющихся источников питания, таких как энергия на борту машины, такой как вертолет, или от энергии генератора.
[0092] Зарядная станция 1710 является присоединяемой станцией, и это означает, что УУГ можно подключать к зарядной станции 1710 и помещать внутри нее самой. В некоторых вариантах осуществления док-станция имеет два рычага 1720 с каждой стороны устройства; при помещении УУГ между рычагами так, чтобы слышался щелчок, УУГ зафиксируется на месте. При правильном расположении электрические контакты УУГ, имеющиеся на раме устройства, соприкоснутся с электрическими контактами внутри зарядной станции; электрическая зарядка УУГ начнется автоматически. УУГ можно высвободить нажатием кнопки 1740 с боковой стороны зарядной станции.
[0093] Для отображения для пользователя состояния зарядки система зарядки имеет индикатор 1730, указывающий состояние зарядки. Поверх зарядной станции имеется переключатель 1750 питания на случай оперативной необходимости. При этом операторы могут также включать/выключать зарядную станцию и просматривать состояние зарядки посредством переносного интерактивного дисплея 1550.
[0094] На фиг. 18 проиллюстрирована рабочая процедура 1800 устройства устойчивости груза на внешней подвеске, включающая в себя множество режимов или состояний ожидания команд, в соответствии с одним вариантом осуществления.
[0095] В блоке 1805 устройство устойчивости груза устанавливают на трос, к которому будет подвешен груз. Установка не требует включения питания устройства.
[0096] В блоке 1810 УУГ запускают.В некоторых вариантах осуществления устройство можно инициализировать нажатием кнопки, расположенной на передней стороне центрального модуля УУГ. Рядом с этой легкодоступной внешней кнопкой, которая может инициализировать устройство, может находиться другая кнопка, нажатие которой позволяет немедленно отключить устройство. Помимо интерфейса инициализации на центральном модуле устройство также может быть инициализировано оператором, не находящимся непосредственно рядом с устройством. Один или более внешних операторов, включая, без ограничений, спасателя на конце троса, могут инициализировать устройство нажатием кнопки на одном или более интерактивных дисплеях 1550, связанных беспроводным образом с УУГ.
[0097] В блоке 1815 УУГ активируют и переходят к работе 1820 в одном из функциональных режимов УУГ или состояний ожидания команд, выбранных оператором. Функциональные режимы или состояния ожидания команд устройства являются следующими:
[0098] Режим 1821 простоя - все внутренние системы УУГ работают (например, УУГ наблюдает за своим движением и вычисляет корректирующее действие), но двигатели отключены или поддерживают только скорость холостого хода, не совершая никаких действий для воздействия на движение груза.
[0099] Режим 1822 поддержания относительного положения по отношению к своему судну - УУГ стабилизируется по отношению к первоначальной точке подвешивания. Например, при подвешивании УУГ с грузом под вертолетом УУГ будет оставаться непосредственно под вертолетом. УУГ определяет движение своего судна и выполняет корректирующие действия, необходимые для того, чтобы добиться критического затухания любого другого движения груза на внешней подвеске. Если свое судно движется с низкой скоростью, УУГ будет подбирать скорость так, чтобы два объекта перемещались синхронно. При отклонении груза УУГ обеспечивает тягу в направлении отклонения, чтобы противодействовать отклонению, устраняя раскачивание.
[00100] Режим 1823 перемещения в положение / остановки в положении: УУГ стабилизируется в фиксированном положении, противодействуя влиянию погоды или небольшим перемещениям вертолета или другой платформы подвешивания. Данный режим имеет эффект подавления любого движения. Оператор может направить желательное целевое положение на УУГ посредством удаленного интерфейса 1550. Это можно выполнить по меньшей мере двумя способами:
[00101] Положение 1824 целевого узла: оператор может поместить удаленный позиционный блок или целевой узел 1610 УУГ в желаемом местоположении снижения (например, в местоположении 160 на фиг. 1). Целевой узел 1610 будет беспроводным образом обмениваться данными с УУГ для указания желательного положения, а УУГ реагирует путем перемещения в желательное местоположение. Удаленный интерфейс 1550 (UI) будет принимать и отображать информацию о местоположении обоих объектов.
[00102] Назначенное пользователем положение 1825: оператор с помощью удаленного интерфейса 1550 (UI) может направлять на УУГ назначенное положение (например, координаты по широте и долготе) в качестве заданного местоположения. После этого устройство будет устойчиво направлять груз на внешней подвеске в желательное положение. Одновременно устройство будет поддерживать обратную связь с удаленным интерфейсом 1550 (UI) в отношении информации о положении и расстоянии.
[00103] Режим 1826 удержания положения: УУГ будет противостоять любому движению и поддерживать свое текущее положение независимо от движения своего судна. Данный режим имеет эффект подавления любого движения. Данный режим имеет условные отклики соответственно на скорость, факторы безопасности и физические ограничения своего судна.
[00104] Режим 1827 непосредственного управления: управление УУГ с помощью джойстика с тремя степенями свободы. Оператор может непосредственно управлять позиционированием, вращением и уровнем мощности на выходе двигателя. Хотя УУГ представляет собой полностью замкнутый контур и во время работы не требует внешнего управления, существует возможность пользовательского управления.
[00105] В блоке 1830 оператор завершает операцию и возвращает УУГ.
[00106] В блоке 1835 устройство может быть выключено нажатием кнопки на интерактивном дисплее или нажатием кнопки на самом центральном модуле. Если УУГ содержит складные консоли силовой установки, они могут быть сложены. Груз отсоединяют от грузового крюка 630, а затем трос внешней подвески отсоединяют от подъемного кольца 520 в верхней части УУГ. После этого УУГ можно поместить в его зарядное устройство или любое удобное местоположение.
[00107] На фиг. 19 проиллюстрирована процедура 1900 принятия решений и управления устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. УУГ работает в замкнутом контуре, определяя свое положение и движение почти в режиме реального времени, выполняя ряд вычислений для определения наиболее желательного отклика устройства, затем направляя желательный отклик на комплект двигателей системы воздушной силовой установки, чтобы ослабить раскачивание кабеля во время операций. Этот процесс продолжается до тех пор, пока система получает питание.
[00108] Блок-схема 1900 управления верхнего уровня УУГ начинается в блоке 1905 с получения данных с множества датчиков, включая (без ограничений) акселерометр, гироскоп, магнитометр, GPS, лидар/радар, машинное видение и/или дальномеры.
[00109] В блоке 1910 УУГ объединяет данные от датчиков для получения слияния данных, описывающего ее положение, ориентацию, движение и условия окружающей среды.
[00110] Данные датчиков объединяются и фильтруются УУГ посредством нелинейных разновидностей фильтра Калмана для получения точного представления о состоянии устройства. Традиционные способы управления с замкнутым контуром, включающие в себя нечеткие пропорционально-интегрально-дифференциальные контроллеры обратной связи, имеют двунаправленную связь с передовыми способами управления, включающими в себя нейронные сети глубокого обучения и прогнозирующие фильтры Калмана, обеспечивающие дальнейшую идентификацию устройства в режиме реального времени.
[00111] В блоке 1915 УУГ выполняет оценку состояния с помощью нелинейных средств оценки состояния для прогнозирования движения в ближайшем будущем на основе слияния данных и обратной связи от подсистемы принятия решений и управления на средство оценки состояния.
[00112] В блоке 1920 подсистема принятия решений и управления получает оценку состояния 1915, учитывает выбранный пользователем функциональный режим или состояние 1820 ожидания команд, а также дополнительную обратную связь по отображению тяги и ориентации 1930 и выходные данные управления 1940, и принимает решение о том, как должна перемещаться или прикладывать усилие УУГ.
[00113] Выходные данные алгоритма системы направляются на контроллеры движения, которые дают отклик в виде указания желательной тяги на электрические туннельные вентиляторы посредством регулирования фазы. Чистая тяга на выходе отображается в режиме реального времени посредством кодеров и тензодатчиков и затем направляется обратно на главное устройство и контроллеры для управления с замкнутым контуром.
[00114] В блоке 1930 отображение тяги и ориентации УУГ применяет решение УУГ о том, как должна перемещаться или прикладывать усилие 1920 УУГ, чтобы определить тягу и ориентацию для применения тяги для перемещения или приложения усилия в соответствии с решением.
[00115] В блоке 1935 отображение вентилятора применяет определенные тягу и ориентацию для применения тяги, чтобы сформировать отображение вентилятора для управления двигателями 1210 с целью достижения определенных тяги и ориентации УУГ.
[00116] В блоке 1940 двигатели 1210 УУГ применяют полученные выходные данные управления, реализуя динамический отклик в виде тяги, противодействующей нежелательному движению.
[00117] Весь процесс проходит без участия человека и является автоматизированным, за исключением выбора оператором функциональных режимов управления высокого уровня. Чистым итогом является управляющее усилие для стабилизации груза на внешней подвеске.
[00118] На различных поверхностях УУГ могут быть установлены световые индикаторы состояния, облегчающие визуальный контроль и управление УУГ сверху и снизу. Например, УУГ может иметь внешнюю подсветку, например, светоизлучающие диоды (LED), рядом с двигателями, которая определяет границы и ориентацию УУГ. Это позволяет лучше ориентироваться в условиях плохой видимости, например, при ненастной погоде. Во время работы LED как на интерактивном дисплее, так и на самом корпусе устройства показывают, что устройство активно, и передают полезную информацию.
[00119] На фиг. 20A проиллюстрирован вид в перспективе верхнего кольца троса устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления, а на фиг. 20B проиллюстрирован вид сверху световых индикаторов состояния устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Сверху корпуса УУГ и вокруг подъемного кольца 520 подсвеченные индикаторы состояния могут представлять разного рода информацию, полезную для оператора, из УУГ.
[00120] В некоторых вариантах осуществления световой индикаторный дисплей состояния может указывать целостность приема сигнала УУГ. Процессор 1010 УУГ измеряет силу сигнала и на основе заданных порогов изменяет цвет световых индикаторов для указания такой силы.
[00121] Другой индикатор состояния может указывать направление и величину тяги в устройстве. В некоторых вариантах осуществления стрелки 2010 представляют собой цветные LED, причем самая близкая к центру стрелка, указывающая наружу, имеет зеленый цвет, следующая - желтый, третья - оранжевый, а наружная стрелка - красный. УУГ может зажигать стрелки-индикаторы 2010 для указания направления, в котором устройство пытается перемещать груз, и использовать цветовую иерархию стрелок для отображения мощности на выходе устройства. Например, зеленый индикатор 2010 может указывать 5-25% уровня мощности на выходе устройства, желтый может указывать 25-50%, зеленый - 50-75% и красный - 75-100%. Высокий уровень мощности на выходе устройства указывает оператору платформы, такому как оператор крана или пилот летательного аппарата, на необходимость двигаться в направлении, указанном стрелками 2010, для уменьшения мощности на выходе устройства и поддержания желательного позиционирования груза.
[00122] Концентрические центральные кольцевые LED 2020 также могут быть цветными, например, внутреннее кольцо - красным, среднее кольцо - оранжевым и наружное кольцо - красным. Кольцевые LED 2020 могут указывать на высоту груза над землей. Например, зеленое кольцо может указывать на высоту более 25 футов над землей, оранжевое кольцо может указывать на высоту от 25 футов до 10 футов над землей и красное кольцо может указывать на высоту менее 10 футов над землей.
[00123] В различных вариантах осуществления внешние световые индикаторы состояния УУГ могут быть выполнены с возможностью указания одного или более из положения УУГ, ориентации УУГ, расстояния от препятствий, высоты над уровнем земли, качества сигнала беспроводного приемопередатчика, режима или состояния ожидания команд процессора УУГ, инерционных характеристик груза, энергоемкости или доступной энергии от источника питания, рабочей нагрузки или потребления энергии двигателей, тяги от каждого двигателя, движения или направления тяги УУГ и рекомендованного оператору направления для перемещения платформы, на которой подвешен груз.
[00124] На фиг. 21 проиллюстрирован снимок 2100 экрана интерфейса управления для устройства устойчивости груза на внешней подвеске в соответствии с одним вариантом осуществления. Интерактивный дисплей 1550 представляет собой вычислительное устройство, поддерживающее беспроводной обмен данными с УУГ, и имеет экран, который отображает индикаторы для текущего состояния устройства и элементы управления для устройства. Например, проиллюстрированный снимок экрана с дисплея содержит график 2110 тяги в зависимости от времени для каждого двигателя 1210, а также показания энергоемкости 2120 и измерительные устройства для текущей тяги 2130 вентиляторов. В различных вариантах осуществления интерактивный дисплей 1550 будет также указывать положение УУГ относительно платформы подвешивания и/или целевого узла. Интерактивный дисплей 1550 также обеспечивает обратную связь по состоянию груза в виде визуальных (и звуковых, где это применимо) индикаторов, которые описывают инерционные характеристики груза, предлагаемые меры и рабочую нагрузку устройства в режиме реального времени.
[00125] В различных вариантах осуществления интерактивный дисплей 1550 содержит различные кнопки, которые указывают и выбирают разные функциональные режимы или состояния ожидания команд устройства, как описано выше со ссылкой на фиг. 18. Если оператор находится за пределами досягаемости УУГ, он может также инициализировать УУГ посредством интерактивного дисплея 1550. Интерфейс 2100 управления также включает в себя механизм 2140 отключения в виде ярко-красного переключателя «ВЫКЛ.».
[00126] На фиг. 22 проиллюстрирован график 2200, на котором показано движение раскачивающегося груза 2230 и движение груза 2240, стабилизированного устройством устойчивости груза на внешней подвеске. По оси Y графика отображается угловое положение (в градусах) груза 2210, в данном случае представляющего собой пловца-спасателя, раскачивающегося под вертолетом. По оси X графика отображается время 2220 (в секундах), прошедшее с момента начального максимального отклонения в 30 градусов, исключительно большого отклонения из-за турбулентных ветров, во время опускания полностью снаряженного пловца-спасателя весом 100 кг на лодку. Такое большое максимальное отклонение относительно вертикальной оси создает исключительно опасную ситуацию для пловца, экипажа своего судна и терпящих бедствие людей на лодке.
[00127] В отсутствие УУГ пилот постепенно вернул бы контроль над пловцом 2230 на внешней подвеске, однако, тот продолжал бы раскачиваться длительное время и, возможно, в конце концов зацепился или ударился бы о леера лодки и упал на палубу. В отличие от этого при использовании УУГ пловец быстро возвращается в неподвижное вертикальное положение под судном. УУГ гасит 30-градусное колебательное движение до менее чем одного градуса менее чем за десять секунд. Использование УУГ во время такой операции сокращает продолжительность зависания вертолета и позволяет командиру экипажа безопасно опускать пловца на лодку, в конечном счете, снижая риск и продолжительность операции.
[00128] Устройства устойчивости груза, описанные в настоящем документе, управляют маятникообразным движением внешнего груза, прикрепленного к тросу, посредством динамической воздушной силовой установки для устранения поперечных колебаний и раскачивания с вращением. УУГ не зависит от типа платформы, на которой оно подвешено. Оно определяет необходимые характеристики динамики полета для выполнения корректирующих действий с грузами любого типа на внешней подвеске. Оно может быть адаптировано для операций по перевозке внешних грузов, грузов на внешней подвеске и спасательных подъемных операций среди многих других областей применения, где может быть полезно независимое устройство стабилизации с автономным питанием и замкнутым контуром, которое противодействует маятникообразному движению любого груза на внешней подвеске.
[00129] Хотя в настоящем документе были проиллюстрированы и описаны конкретные варианты осуществления, обычным специалистам в данной области следует понимать, что вместо показанных и описанных конкретных вариантов осуществления могут использоваться альтернативные и/или эквивалентные варианты реализации без отступления от объема настоящего описания. Например, несмотря на то, что различные варианты осуществления описаны выше в отношении вертолета, в других вариантах осуществления УУГ может использоваться под строительным краном или портальным краном. Настоящая заявка предназначена для того, чтобы охватить любые адаптации или вариации вариантов полезной модели, описанных в настоящем документе.
Реферат
Устройство устойчивости груза включает в себя полностью автоматизированное устройство с автономным питанием, в котором используется тяга для противодействия поперечному и вращательному движению внешнего груза и управления им. Устройство временно устанавливают на груз, трос или траверсу и оно не зависит от платформы, на которой оно подвешено.
Формула
Документы, цитированные в отчёте о поиске
Аэростатический аппарат
Комментарии