Комбайн для уборки овощей - RU2080765C1
Код документа: RU2080765C1
Чертежи
Описание
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для уборки сочноплодных овощных культур и лука.
Известна конструкция томатоуборочного комбайна /1/, содержащего жатвенно-приемную группу, включающую подрезающую часть и элеватор; плодоотделяющую группу, состоящую из выносного и переносного транспортеров, встряхивающих барабанов, плодоотделителя, системы транспортеров.
Между элеватором и переносным транспортером имеется зазор для разделения вороха на два потока, кусты томатов передаются на клавишный плодоотделитель, а оторванные плоды вместе с землей просыпаются на выносной транспортер.
Недостатком конструкции являются низкие качественные показатели работы плодоотделителя и сепарирующей группы комбайна.
Более близким техническим решением, выбранным в качестве прототипа, является томатоуборочный комбайн /2/, состоящий из подрезающей группы; элеватора; пальчатого барабана с расположенной под ним пальчатой горкой, охватываемой редкопрутковым транспортером; двух каскадов клавишного плодоотделителя, под которым установлен транспортер плодов с вентилятором; системы щеток, транспортеров и вальцов.
Недостатком конструкции является низкий коэффициент сепарации из вороха почвенных комков соразмерных или больших размеров плода, а также недостаточно эффективная работа двухкаскадного клавишного плодоотделителя.
Задачей изобретения является создание комбайна повышенной производительности и надежности выполнения технологического процесса при высоких качественных показателях работы сепарирующей и плодоотделяющей групп.
Эта задача достигается тем, что плодоотделитель представлен группой барабанов с выдвижными пальцами, фазы максимального вылета которых меньше фазы максимального вылета пальцев передающего барабана, а их привод обеспечивает увеличение скорости вращения в сторону, противоположную от элеватора, причем корпус каждого последующего барабана расположен выше предыдущего. Это позволяет последовательно и с большей инерционной нагрузкой воздействовать на ворох плодов при движении его к выходу с плодоотделителя с постоянным отводом плодов в зазор между барабанами, что соответственно при большой производительности устройства и высокой плодоотделяемости позволяет значительно уменьшить повреждаемость плодов.
Также задача изобретения достигается тем, что горка установлена перед щеточным барабаном и выполнена треугольной формы, одной из вершин направлена вверх и снабжена механизмом натяжения полотна, размещенным в этой вершине под полотном, кроме того наклон полотна горки в ее сходной ветви больше или равен углу трения плодов, а щеточный барабан установлен под ее нижней образующей с возможностью продольного регулирования. Возможно также выполнение горки из двух частей и часть горки, расположенная перед частью треугольной формы, размещена под большим углом к горизонтальной плоскости, чем сходная ветвь части треугольной формы, причем пальцы частей горки установлены с перекрытием друг друга. Это обеспечивает поштучную подачу компонентов вороха без растительных примесей с разными местами их схода с пальчиков треугольной части горки перед щеткой, что и определяет высокую эффективность ее работы высокое качество сепарации почвенных примесей, комков и поврежденных плодов от стандартных при минимальных их потерях.
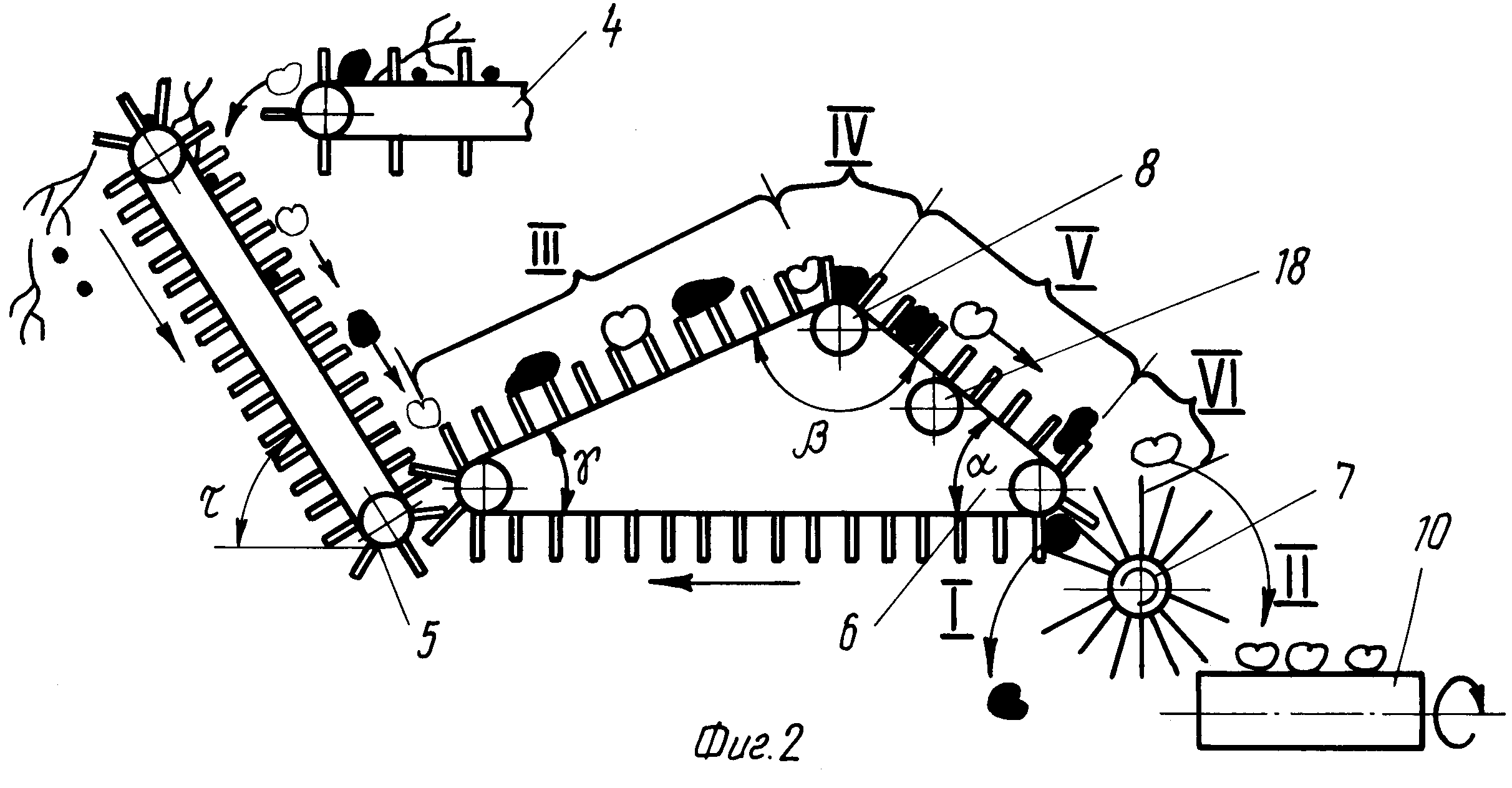
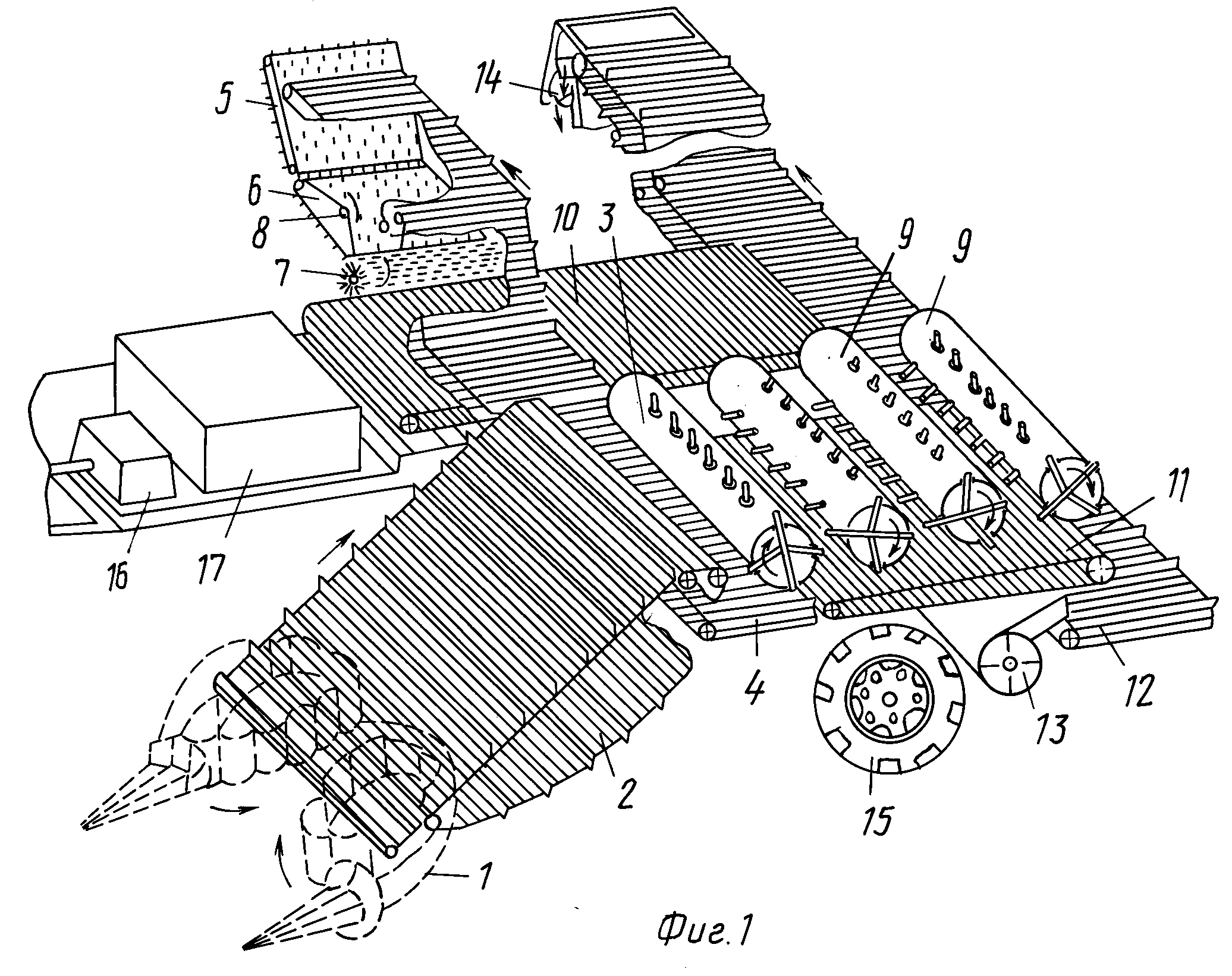
На фиг. 1 изображен томатоуборочный комбайн; на фиг. 2 схема для отделения плодов от комков почвы и примесей.
Комбайн состоит из подрезающих рабочих органов 1, которые в зависимости от условий уборки могут быть представлены в виде подрезающих дисков с вертикальными транспортерами, квадратного вала или косилки; элеватора 2, который в верхней части выполнен горизонтально; передающего барабана 3, поперечного транспортера 4, подающего ворох на систему горок 5 и 6 цилиндрической щеткой 7. Пальчиковая горка 6 имеет механизм 8 натяжения верхней образующей полотна. Ротационный плодоотделитель представлен системой барабанов 9 с эксцентрично расположенными выдвижными пальцами. Комбайн также содержит транспортеры: переборочный 10, плодов 11, выгрузной 12, вентилятор 13, гаситель плодов 14, ходовую часть 15. Привод рабочих органов гидравлический и осуществляется через раздаточную коробку 16. Рабочая жидкость находится в масляном баке 17.
Все транспортеры комбайна выполнены прутковыми и покрыты мягким материалом, как и корпусы всех барабанов, которые имеют регулировки по высоте относительно друг друга, фазы максимального вылета пальцев и частоты вращения.
Механизм натяжения полотна горки 6 треугольной формы представлен в виде вала, регулируемого по высоте полотна. При этом возможно изменение межосевого расстояния ведущего и ведомого валов горки 6, что позволяет регулировать силу и величину раскрытия и закрытия свободных частей пальчиков полотна горки.
Механизм 8 натяжения полотна горки 6 треугольной формы, имея регулировку по месту натяжения полотна этой горки, обеспечивает получение угла огибания полотна горки β< 180°, угла скатывания α, равного или более углу трения стандартных плодов о пальчики горки 6, и угла g менее этого значения /фиг. 2/.
Для увеличения фрикционных свойств пальчики горки 6 выполнены из резины и возможно шероховатыми и установлены рядами таким образом, что ворса цилиндрической щетки 7 входит в межпальцевые зазоры.
Цилиндрическая щетка 7 имеет возможность регулирования ее по удалению от полотна горки 6.
Комбайн работает сведущим образом.
При движении по убираемому участку поля подрезающие рабочие органы 1 /фиг. 1/ в виде дисков с транспортерами или квадратного вала, вращаемого в сторону элеватора, или косилки подрезает и подбирает верхний слой почвы с кустами и осыпавшимися плодами, подавая подобранную массу на элеватор 2, где происходит просев в межпрутковые пространства мелких почвенных примесей. При сходе с горизонтального участка элеватора 2 масса разделяется на два полотна.
Опавшие плоды, мелкие растительные примеси и почва проваливаются в технологическую щель, организованную крайним прутком элеватора 2 и передающим барабаном 3, и подаются транспортером 4 на часть пальчиковой горки 5 с положительным углом подачи. Растительные примеси и часть почвы выносятся пальчиками части горки 5 на убранный участок поля, а плоды и соразмерные комки скатываются с полотна части горки 5 на приемную часть пальчиковой горки 6 треугольной формы. Так как направление /но не всегда/ и величина скорости движения полотна частей горки 5 и 6 как и их углы установки различные, а их место контакта в зоне III /фиг. 2/ организует V-образную зону, то компоненты вороха подаются на щетку 7 поштучно и с подпором. В зоне IV части горки 6 механизм 8 натяжения ее полотна заставляет раскрыться пальчикам горки 6, что предопределяет погружение компонента вороха в межпальцевый зазор. После прохода полотном части горки 6 механизм 8 натяжения, ее пальчики выравниваются /зона V/, обеспечивая величину выталкивающей силы для преодоления сил трения и тяжести стандартного плода. Так как коэффициент трения скольжения почвенного комка или поврежденного плода /по мякоти/, например об резину, значительно выше аналогичного коэффициента трения стандартного плода /с его кожицу/, то он зажимается в зоне V упругими резиновыми пальцами полотна части горки 6 /выталкивающая сила меньше сил трения и тяжести/ и подносится в зону VI части горки 6 в нижних слоях пальчикового полотна.
Так как одним из основных факторов качества сепарации на встречно вращаемой цилиндрической щетке 7 является точка контакта /угол ее нахождения/ компонента вороха о ее поверхность, то примеси, подведенные пальчиками части горки 6 на поверхность цилиндрической щетки 7, ближе в сторону полотна части горки 6, захватываются ее ворсой /или вычесываются/ и по траектории I выносятся на убранный участок поля.
Стандартные плоды, начавшие катиться /угол a, равный или более угла их трения о пальчиковую поверхность/ или поднесенные концами пальчиков горки 6 в зонах V и VI к цилиндрической щетке 7 далее от полотна горки 6 в сравнении с примесями, соскальзывают по ее ворсе и по траектории II поступают на переборочный транспортер 10. Установка в зоне V полотна части горки 6 встряхивателя 18 обеспечивает соответствующую амплитуду колебаний полотна в этой зоне для лучшего выхода стандартных плодов /особенно мелких/ из межпальцевого зазора.
На качество сепарации цилиндрической щеткой 7 оказывает также влияние разница в коэффициентах трения скольжения между стандартными плодами и примесями о ворсу щетки 7. После ручной инспекции /если она необходима/ плоды поступают на выгрузной транспортер 12 /фиг. 1/.
Кусты с закрепленными на них плодами /второй поток/ снимаются с горизонтального участка элеватора 2 пальцами передающего барабана 3 и подаются на ротационный плодоотделитель 9.
Увеличение высоты установки барабанов 9 по отношению друг к другу совместно с уменьшением фазы максимального вылета пальцев позволяют увеличить силу воздействия на кусты с плодами в виде инерционно ударного и очесывающего его типа. В сторону от элеватора 2 сила воздействия на кусты с плодами также увеличивается за счет увеличения окружной скорости каждого последующего барабана 9. При этом менее прочные плоды, имеющие незначительное усилие прикрепления к плодоножке /или усилие излома сочленения в коленце/, отрываются на первых барабанах 9 ротационного плодоотделителя, проваливаются в зазор между ними и попадают на транспортер плодов 11, что обеспечивает снижение их повреждаемости.
Более прочные плоды, имеющие большое усилие прикрепления /чаще для томатов/, попадают более в "жесткий" режим последних барабанов 9 ротационного плодоотделителя, отрываются и также попадают на транспортер 11. Вместо с плодами на транспортер 11 попадают также листья и мелкие растительные примеси, которые при сходе на выгрузной транспортер 12 выдуваются воздушным потоком, создаваемым вентилятором 13.
Два потока плодов таким образом соединяются на выгрузном транспортере 12 и через гаситель 14 подаются в прицеп рядом движущегося средства, а свободные кусты выбрасываются последним барабаном ротационного плодоотделителя на убранный участок поля.
Для таких культур как лук после предварительной подрезки движение вороха происходит лишь по первому потоку, где используются лишь элементы сепарирующей группы 5, 6, 7 и переборочный транспортер 10.
В зависимости от типа убираемой культуры комбайн имеет следующие регулировки: угол наклона конечной части элеватора 2, угол наклона и скорости полотен частей горок 5 и 6, дальность установки щетки 7 по отношению к части горки 6, фазы максимального вылета пальцев и частота вращения барабанов 9, частота вращения крыльчатки вентилятора 13 и скорость переборочного транспортера 10.
Теоретическим имитационным моделированием процесса, многофакторными экспериментальными исследованиями определено, что на увеличение плодоотделяемости как и на уменьшение повреждаемости плодов наибольшее влияние оказывает совместное влияние высоты установки барабанов по отношению друг к другу с фазой крайнего барабана. Причем при увеличении высоты фазу надо уменьшить /Отчет НИР "Исследование и обоснование технологии и комплекса машин для уборки и послеуборочной обработки томатов". Мелитополь: МИМСХ, 1990. с. 12 17, 23, N ГР 01860043979, инв. N 02910041797/. Поэтому для переноса кустов с неотделившимися плодами переносным барабаном 3 /фиг. 1/ фаза максимального вылета его пальцев должна быть больше аналогичного параметра для барабанов ротационного плодоотделителя 9, а высота установки по отношению к элеватору незначительная /0,05 м/.
После реализации программы крутого восхождения по поверхности отклика методом Бокса-Уилсона оптимальными для томатов можно считать следующие параметры и режимы работы ротационного плодоотделителя соответственно от первого по третий барабаны: высота установки от оси первого барабана 0,185; 0,320; 0,460 м; фазы максимального вылета пальцев 0;10;20o; частота вращения барабанов 70; 77; 100 мин-1. При этом диаметры барабанов с учетом резинового покрытия равны 0,31 м, эксцентриситеты 0, 068 м и максимальный вылет пальцев 0,015 м.
Необходимо также отметить влияние разницы в частоте вращения барабанов ротационного плодоотделителя.
При производительности плодоотделителя свыше 10 т/ч эффективность отделения плодов превышала 95% при их повреждаемости не выше 2% Положительным в период полевых испытаний можно считать то, что ротационный плодоотделитель не совершает никаких колебательных движений, что пресуще всем типам внедренных в настоящее время плодоотделителей. А это обеспечивает надежность работы машины и лучшие условия работы на ней переборщиков.
Эффективность отделения перца от ботвы составила свыше 82% при
повреждаемости не более 7%
Теоретические и экспериментальные исследования работы группы сепарации
комбайна на сортах томатов Новичок, Волгоградец /СССР/, Драгон /США/ показали, что при
оптимальных диаметре щетки 0,2 м с длиной ворсы не менее 0,05 м, толщиной ворсин 0,6 мм, их плотностью 7
шт/см2 и частотой вращения щетки 1200 мин-1 /данные вышеуказанного
отчета/, прямоточной горке 5 /фиг. 1/ с углом t 46o и скоростью движения полотна 1,1 м/с,
пальчиковой горке 6 с углами a 21o, g 10o, b 149o и скоростью
движения полотна 0,5 м/с, при установке ее пальцев по отношению к щетке не далее ее оси коэффициент
сепарации растительных примесей составил свыше 99% а почвенных комков 88%
Государственные
испытания прицепного комбайна КП-9 в этих режимах на уборке томатов Южно-Украинской МИС в 1991 году
показали, что комбайн при достаточно высокой производительности /свыше 10 т/ч/ выдает чистый ворох
с минимальными затратами ручного труда /двое рабочих инспекционного стола/. При этом потери плодов не
превышают допустимые требования.
Реферат
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для уборки сочноплодных овощных культур и лука. Комбайн для уборки овощей содержит подрезающие рабочие органы 1 с элеватором 2, передающий барабан 3 с эксцентрично расположенными выдвижными пальцами, пальчатую горку 6, переборочной продольной и выносной транспортеры 10, 11, 12 и плодоотделитель, выполненный из нескольких последовательно расположенных барабанов 9 с выдвижными пальцами. Фаза максимального вылета пальцев передающего барабана 9 плодоотделителя меньше максимальной фазы вылета пальцев передающего барабана 3. При этом барабаны 9 плодоотделителя снабжены приводом, выполненным с возможностью обеспечения увеличения скорости вращения барабана 9 в сторону, противоположную от элеватора 2. Корпус каждого последующего барабана 9 расположен выше предыдущего. Горка 6 установлена перед цилиндрической щеткой 7 и выполнена треугольной формы, одной из вершин направлена вверх и снабжена механизмом 8 натяжения полотна, размещенным в этой вершине под полотном. Кроме того, наклон полотна горки 6 в ее сходной ветви больше или равен углу трения плодов, а щеточный барабан 7 установлен под ее нижней образующей с возможностью продольного регулирования. 1 з.п. ф-лы, 2 ил.

Комментарии