Электрическая зубная щетка - RU2445938C1
Код документа: RU2445938C1
Чертежи
































Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к электрической зубной щетке.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Ниже представлены известные идеи, способствующие правильному способу использования электрической зубной щетки.
Патентный документ 1 раскрывает конфигурацию, в которой определяются продолжительность чистки, давление щетки и левая и правая ориентации щетки и отображается достигнутая степень очистки соответственно с левой стороны и правой стороны. Патентный документ 2 раскрывает конфигурацию, в которой, когда зубная щетка снята с базы зарядного устройства, запускается таймер для измерения продолжительности чистки. Патентный документ 3 раскрывает конфигурацию, в которой продолжительность чистки отсчитывается только при правильном давлении щетки, и, когда отсчитанная величина достигает предварительно установленного заданного времени, выполняется извещение. Патентный документ 4 раскрывает идею, в которой ориентация корпуса зубной щетки относительно оси определяется по четырем или восьми позициям, и очищаемый участок оценивается на основании результата определения. В частности, в корпусе имеется множество веерообразных секций, расположенных по кругу. Ориентация корпуса зубной щетки оценивается путем обнаружения секции, в которой находится проводящий шарик, по изменению электрического сопротивления. Однако уменьшить размеры такого механизма нелегко. Поскольку положение шарика неустойчиво из-за движения зубной щетки, трудно получить высокую точность обнаружения. В патентном документе 4 записываются количество и продолжительность чистки для каждого участка и выдается вычисление о том, выполнена или нет чистка соответствующим образом.
Патентный документ 5 раскрывает электрическую зубную щетку, в которой непрерывно отображаются промежутки времени для чистки областей полости рта. Патентный документ 6 раскрывает инструмент для обучения детей чистке зубов, в которых порядок чистки определяется подсветкой каждого зуба по порядку на устройстве отображения, имеющем форму зубного ряда.
Патентный документ 1: японская нерассмотренная патентная публикация № H6-315413
Патентный документ 2: японская нерассмотренная патентная публикация (Перевод заявки PCT) № 2003-534095
Патентный документ 3: японская нерассмотренная патентная публикация № S57-190506
Патентный документ 4: японская нерассмотренная патентная публикация № 2005-152217
Патентный документ 5: японская нерассмотренная патентная публикация (Перевод заявки PCT) № H10-508765
Патентный документ 6: японская нерассмотренная патентная публикация № 2000-116554
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
В традиционной электрической зубной щетке трудно точно оценить участок, который подвергается чистке. Таким образом, может отображаться по областям лишь в очень грубом приближении, и полноценность и надежность этой информации являются низкими, чтобы служить руководством по чистке. Что касается указаний по чистке, пользователь получает только стандартные указания, что свидетельствует о недостатке гибкости.
В свете решения вышеупомянутых проблем целью настоящего изобретения является обеспечение технического решения, способствующего надлежащему использованию электрической зубной щетки и правильной чистке.
СРЕДСТВА ДЛЯ РЕШЕНИЯ ПРОБЛЕМ
Для достижения вышеупомянутой цели в настоящем изобретении применяются следующие конфигурации.
Электрическая зубная щетка согласно первому аспекту настоящего изобретения включает в себя щетку, средство привода для приведения щетки в движение, средство определения положения для определения положения щетки на основе выходного сигнала датчика ускорения, средство вычисления участка для определения очищаемого участка из множества участков, определенных путем деления поверхности зубного ряда, на основе обнаруженного положения, средство измерения времени для измерения продолжительности чистки каждого участка и средство вывода вычисления для определения и вывода результата чистки каждого участка на основе измеренной продолжительности чистки.
Положение щетки может быть определено с высокой точностью при использовании выходного сигнала датчика ускорения, и очищаемый участок может быть идентифицирован с более высокой точностью и большим разрешением, чем известно из уровня техники. Поэтому можно оценить результат чистки для более мелкого участка, чем в предшествующем уровне техники, и пользователю могут быть предоставлены очень полноценные и надежные указания по результатам вычисления. Кроме того, поскольку датчик ускорения является небольшим по размеру, он может быть легко вмонтирован в корпус электрической зубной щетки. Может использоваться однокоординатный датчик ускорения, и предпочтительно может использоваться многокоординатный (двухкоординатный, трехкоординатный или с большим количеством координат) датчик ускорения.
Нет никакой необходимости в обеспечении всех конфигураций настоящего изобретения в корпусе электрической зубной щетки. Часть конфигураций может обеспечиваться в виде внешнего устройства, отделенного от корпуса электрической зубной щетки (такого, как зарядное устройство для зубной щетки, держатель и исключительный индикатор). В последнем случае электрическая зубная щетка по настоящему изобретению включает в себя корпус электрической зубной щетки и внешнее устройство.
Электрическая зубная щетка может дополнительно включать в себя средство вычисления угла наклона щетки для определения угла наклона щетки, являющегося углом наклона щетки относительно оси зуба, на основании обнаруженного положения, и предпочтительно средство вывода вычисления дополнительно оценивает и выводит результат чистки для каждого участка на основании вычисления угла наклона щетки.
В случае, когда чистка выполняется при неправильном угле наклона щетки, сила, удаляющая зубной камень, меньше, чем при оптимальном угле наклона щетки. Таким образом, существует возможность того, что желательный чистящий эффект не получен, а на чистку потрачено время. При конфигурации согласно настоящему изобретению вычисление производится с учетом угла наклона щетки. Таким образом, пользователь может быть осведомлен о чистке под правильным углом наклона щетки.
Электрическая зубная щетка может дополнительно включать в себя средства определения давления щетки для определения давления щетки, и предпочтительно средство вывода вычисления дополнительно оценивает и выводит результат чистки для каждого участка на основании определенного давления щетки.
В случае, когда чистка выполняется при неправильном давлении щетки, существует возможность возникновения проблемы, заключающейся в том, что снижается сила, удаляющая зубной камень, уменьшается срок службы щетки или увеличивается нагрузка на десну. Давление щетки в электрической зубной щетке может быть меньше, чем в обычной зубной щетке. Поэтому утверждается, что большинство людей, которые только что начали использовать электрическую зубную щетку, стремятся прикладывать чрезмерное давление щетки. В конфигурации по настоящему изобретению вычисление выводится с учетом давления щетки. Таким образом, пользователь может быть осведомлен о чистке при правильном давлении щетки.
Величины, включающие продолжительность чистки, угол наклона щетки и давление щетки, могут оцениваться каждая отдельно, или множество величин может оцениваться комплексно.
Электрическая зубная щетка предпочтительно дополнительно включает в себя средство указания угла наклона щетки, для сравнения определенного путем вычисления угла наклона щетки с предварительно заданной оптимальной величиной угла наклона щетки, и вывода указания для сообщения пользователю, является ли угол наклона щетки правильным.
Таким образом, пользователь может понять, каков оптимальный угол наклона щетки, и научиться правильному способу чистки.
Например, средство указания угла наклона щетки предпочтительно извещает, что угол наклона щетки - оптимален или что угол наклона щетки неоптимален.
Таким образом, пользователь может легко обнаружить соответствие (или различие) между имеющимся углом наклона щетки и оптимальной величиной. Способ извещения может быть каким угодно, например, звуком, светом, вибрацией и голосом.
Далее, средство указания угла наклона щетки предпочтительно ступенчато изменяет уровень извещения в соответствии со степенью разницы между имеющимся углом наклона щетки и оптимальной величиной.
По изменению уровня извещения пользователь может понять, что угол наклона щетки приближается к оптимальной величине, и, следовательно, угол наклона щетки можно легко привести в соответствие с оптимальной величиной.
Электрическая зубная щетка предпочтительно дополнительно включает в себя средство указания очищаемого участка для определения и указания участка, который следует чистить следующим, среди недостаточно вычищенных участков, на основании результата чистки для каждого участка.
Благодаря таким указаниям чистка может быть выполнена эффективно, не оставляя неочищенных участков. То есть участок, который следует чистить следующим, выбирается из недостаточно вычищенных участков. Таким образом, не оставляется невычищенных участков и устраняются бесполезные действия, такие как неоднократная чистка одного и того же участка. В настоящем изобретении определяется участок, который чистят в настоящее время. Таким образом, даже в случае, когда пользователь чистит другой участок вопреки указанию, результат чистки может быть правильно записан и оценен, и указания по порядку чистки могут быть соответственно скорректированы.
Средство указания очищаемого участка предпочтительно указывает на смену очищаемого участка, если участок, подвергаемый чистке, отличается от участка, который следует чистить.
В случае, когда пользователь должен повторно чистить уже почищенный участок, или в подобных случаях, ему подсказывают, что надо сменить очищаемый участок. Таким образом, чистка может быть выполнена эффективно.
Электрическая зубная щетка согласно второму аспекту настоящего изобретения включает в себя щетку, средство привода для приведения щетки в движение, средство определения положения для определения положения щетки, средство вычисления участка для определения очищаемого участка из множества участков, образованных путем деления поверхности зубного ряда, на основании определенного положения, средство вычисления угла наклона щетки для определения угла наклона щетки, являющегося углом наклона щетки относительно оси зуба, на основании определенного положения и средства указания угла наклона щетки для сравнения определенного в результате вычисления угла наклона щетки и оптимальной величины угла наклона щетки в очищаемом участке и выведения указания для сообщения пользователю, является ли угол наклона щетки правильным. Средство указания угла наклона щетки предпочтительно извещает, что угол наклона щетки является оптимальной величиной или что угол наклона щетки не является оптимальной величиной. Средство указания угла наклона щетки предпочтительно ступенчато изменяет уровень извещения в соответствии со степенью различия между имеющимся углом наклона щетки и оптимальной величиной.
Для выполнения настоящего изобретения вышеупомянутые средства и процессы могут сочетаться в максимально возможной степени.
РЕЗУЛЬТАТ ИЗОБРЕТЕНИЯ
Настоящее изобретение способствует правильному использованию электрической зубной щетки и правильной чистке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - блок-схема электрической зубной щетки согласно первому варианту осуществления.
Фиг.2 - вид в разрезе, показывающий внутреннюю конфигурацию электрической зубной щетки согласно первому варианту осуществления.
Фиг.3 - вид в перспективе, показывающий внешний вид электрической зубной щетки.
Фиг.4 - вид, показывающий части очищаемого участка.
Фиг.5 - блок-схема, показывающая основную программу процесса вычисления чистки согласно первому варианту осуществления.
Фиг.6 - блок-схема процесса обнаружения положения согласно первому варианту осуществления.
Фиг.7 - блок-схема процесса вычисления очищаемого участка (верхняя челюсть) согласно первому варианту осуществления.
Фиг.8 - блок-схема процесса вычисления очищаемого участка (нижняя челюсть) согласно первому варианту осуществления.
Фиг.9 - вид, показывающий один пример выходных сигналов Ax, Ay, Az датчика ускорения для каждого очищаемого участка на верхней челюсти.
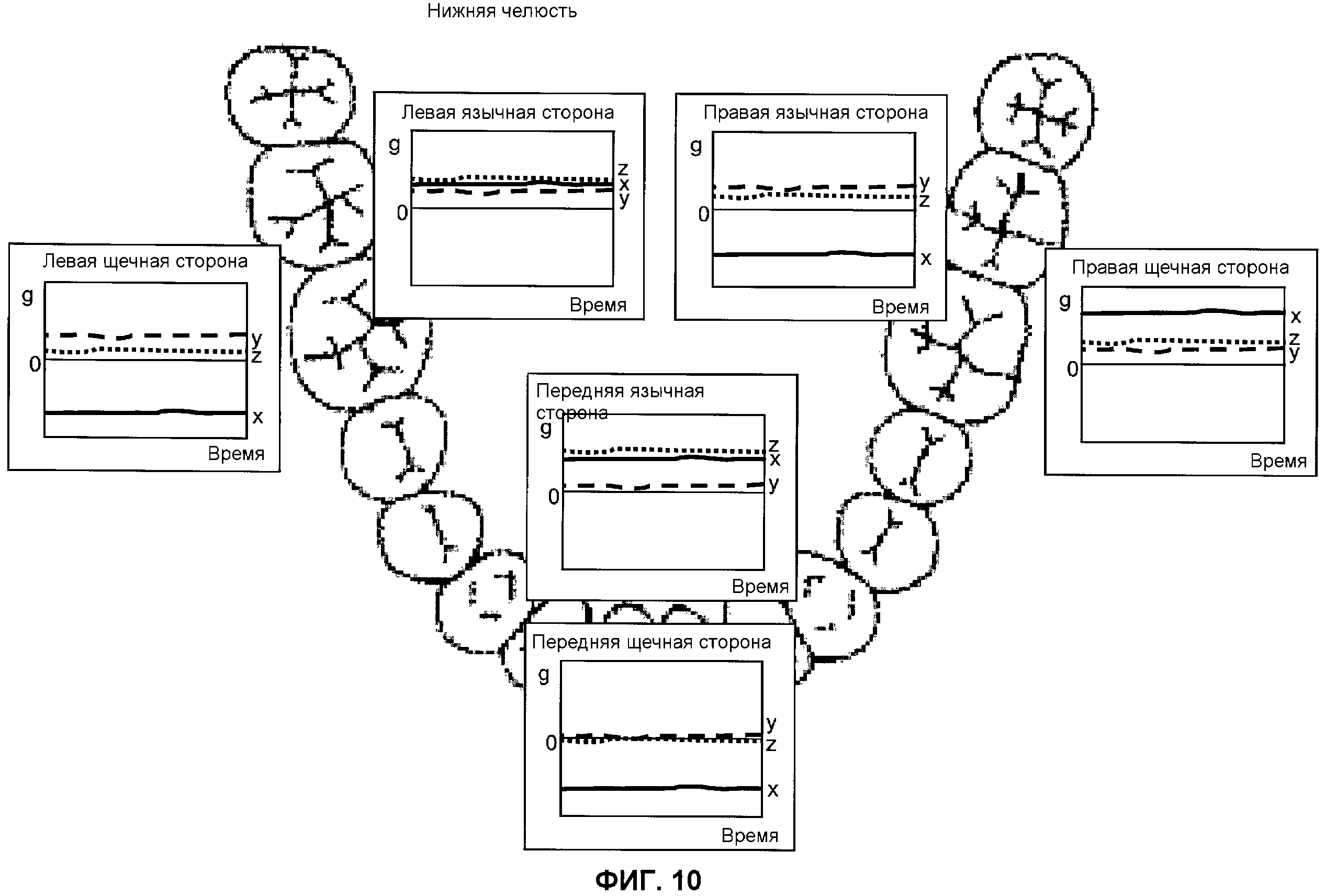
Фиг.10 - вид, показывающий один пример выходных сигналов Ax, Ay, Az датчика ускорения для каждого очищаемого участка на нижней челюсти.
Фиг.11 - вид, показывающий один пример информации о чистке.
Фиг.12 - вид для иллюстрации угла наклона щетки.
Фиг.13 - график, показывающий изменение формы сигнала у выходных сигналов датчика в соответствии с изменением угла наклона щетки.
Фиг.14 - вид, показывающий пример вывода результата чистки (продолжительность чистки).
Фиг.15 - вид, показывающий пример вывода результата чистки (угол наклона щетки).
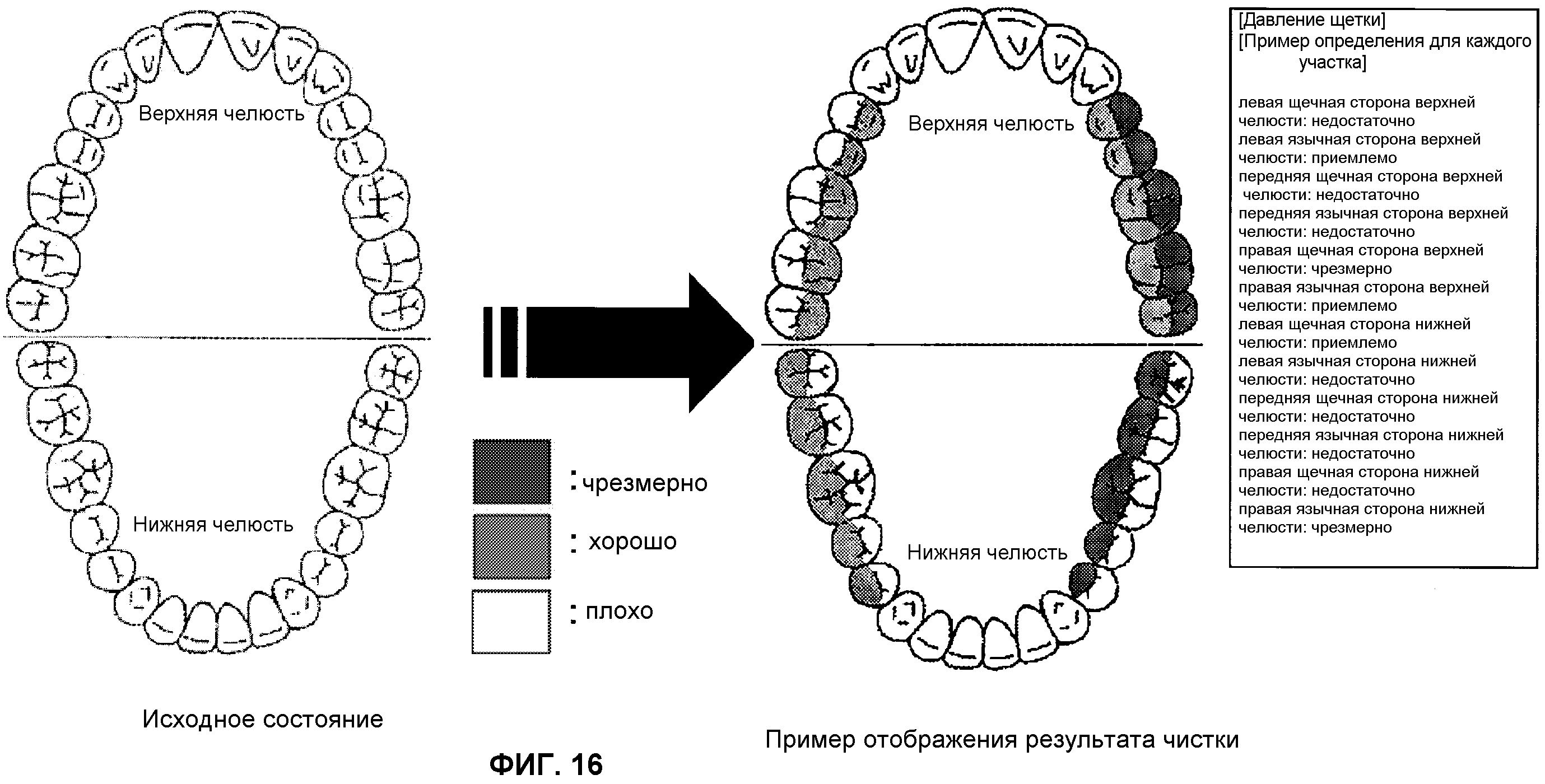
Фиг.16 - вид, показывающий пример вывода результата чистки (давление щетки).
Фиг.17 - вид, показывающий пример вывода результата чистки (комплексная вычисление чистки).
Фиг.18 - блок-схема, показывающая основную программу процесса вычисления чистки согласно второму варианту осуществления.
Фиг.19 - блок-схема процесса вычисления угла наклона щетки согласно третьему варианту осуществления.
Фиг.20 - вид, показывающий пример изменения предупредительного извещения в зависимости от угла наклона щетки.
Фиг.21 - блок-схема, показывающая основную программу процесса вычисления чистки согласно четвертому варианту осуществления.
Фиг.22 - измененный пример блок-схемы фиг.21.
Фиг.23 - блок-схема электрической зубной щетки согласно пятому варианту осуществления.
Фиг.24 - вид в перспективе внешнего вида зарядного устройства согласно пятому варианту осуществления.
Фиг.25 - блок-схема, показывающая основную программу процесса вычисления чистки согласно шестому варианту осуществления.
Фиг.26 - вид в перспективе чистящей части электрической зубной щетки согласно седьмому варианту осуществления.
Фиг.27 - блок-схема процесса вычисления очищаемого участка (верхняя челюсть) согласно седьмому варианту осуществления.
Фиг.28 - блок-схема процесса вычисления очищаемого участка (нижняя челюсть) согласно седьмому варианту осуществления.
Фиг.29 - график, иллюстрирующий уменьшение/возрастание шума в выходных сигналах датчика ускорения.
Фиг.30 - вид, показывающий определение положения угла наклона электрической зубной щетки.
Фиг.31 - вид в перспективе чистящей части электрической зубной щетки согласно восьмому варианту осуществления.
Фиг.32 - вид, иллюстрирующий определение положения согласно девятому варианту осуществления.
Фиг. 33(A)-33(C) являются видами, каждый из которых показывает чистящую часть электрической зубной щетки согласно десятому варианту осуществления.
Фиг.34 - таблица, показывающая зависимость между очищаемым участком и выходными сигналами оптических датчиков.
Фиг.35 - блок-схема процесса вычисления очищаемого участка согласно десятому варианту осуществления.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Предпочтительные варианты осуществления настоящего изобретения будут описаны подробно в качестве примеров со ссылками на чертежи.
Первый вариант осуществления
Конфигурация электрической зубной щетки
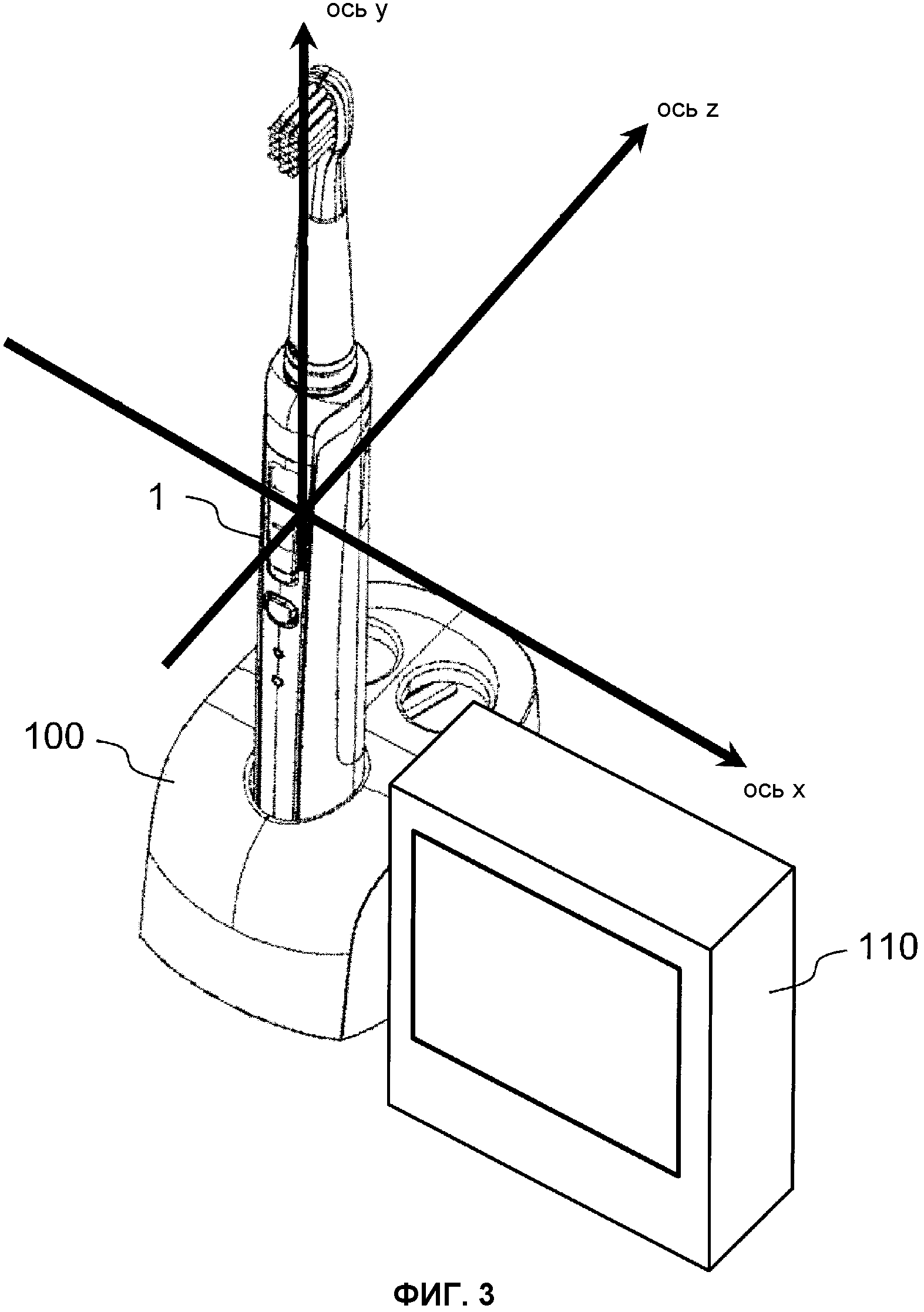
На фиг. 1, 2 и 3 описывается конфигурация электрической зубной щетки. Фиг.1 - блок-схема электрической зубной щетки согласно первому варианту осуществления, фиг.2 - вид в разрезе, показывающий внутреннюю конфигурацию электрической зубной щетки согласно первому варианту осуществления, а фиг.3 - вид в перспективе внешнего вида электрической зубной щетки.
Электрическая зубная щетка имеет корпус 1 электрической зубной щетки (далее также просто называется "корпус 1"), в который вмонтирован двигатель 10, служащий в качестве источника приведения в действие, вибрирующий элемент 2, имеющий щетку 210. Корпус 1 имеет по существу цилиндрическую форму и также служит ручкой, которая захватывается рукой пользователя во время чистки зубов. Дополнительно электрическая зубная щетка согласно настоящему варианту осуществления снабжена зарядным устройством 100 для помещения на него и зарядки корпуса 1 и устройством 110 отображения для выведения результата чистки.
В корпусе 1 имеется выключатель S для переключения положения ВКЛ/ОТКЛ источника питания и переключения режима работы. В корпусе 1 имеется двигатель 10, служащий в качестве источника приведения в действие, управляющая схема 12, аккумулятор 13, служащий источником питания на 2,4 В, зарядная катушка индуктивности 14 и т.п. Во время зарядки аккумулятора 13 корпус 1 просто установлен на зарядное устройство 100 таким образом, чтобы аккумулятор можно было бесконтактно зарядить под действием электромагнитной индукции. У управляющей схемы 12 есть ЦПУ (блок обработки входных и выходных сигналов) 120 для выполнения различных вычислений и управления, память 121 для хранения программы и различных установочных величин, таймер 122, блок 123 передачи данных и т.п. Блок 123 передачи данных является средством коммуникации для беспроводной связи с блоком 112 приема данных устройства 110 отображения. Устройство 110 отображения имеет дисплей 111 для выведения данных, полученных блоком 112 приема данных, таких как результат чистки.
Кроме того, в корпусе 1 имеется многокоординатный (в данном случае - по трем осям x, y, z) датчик 15 ускорения. Как показано на фиг.3, датчик 15 ускорения установлен таким образом, что ось X параллельна поверхности щетки, ось Y соответствует продольному направлению корпуса 1, а ось Z перпендикулярна поверхности щетки. Таким образом, вектор ускорения свободного падения параллелен оси Y, когда корпус 1 установлен на зарядное устройство 100, параллелен оси Z, когда поверхность щетки повернута вверх, и параллелен оси X, когда корпус 1 лежит горизонтально и поверхность щетки повернута в сторону. Выходные сигналы по осям датчика 15 ускорения вводятся в ЦПУ 120 и используются для определения пространственного положения щетки.
В качестве датчика 115 ускорения может быть предпочтительно использован датчик пьезорезистивного типа, емкостного типа или типа MEMS для обнаружения по тепловому излучению. Поскольку датчик MEMS очень мал по размеру, он легко монтируется в корпус 1. Однако тип датчика 15 ускорения этим не ограничивается, и может использоваться датчик электродинамического типа, тензометрический датчик или датчик пьезоэлектрического типа. Хотя это специально не показано на чертежах, могут обеспечиваться корректирующие цепи для коррекции баланса между чувствительностью датчика по осям, температурных характеристик чувствительности, температурного дрейфа и т.п. Может обеспечиваться полосовой фильтр (фильтр нижних частот) для устранения динамической компоненты ускорения и шума. Шум может быть уменьшен путем сглаживания формы выходных сигналов датчика ускорения. Фиг.29 - пример того, что высокочастотный шум формы выходных сигналов уменьшается путем усреднения данных на длительности в сотни миллисекунд.
Корпус 1 снабжен датчиком 17 нагрузки (средством определения давления щетки) для определения давления щетки (нагрузки, приложенной к щетке). В качестве датчика 17 нагрузки может использоваться любой тип датчика, включая тензометрический датчик, тензодатчик и датчик давления. Однако предпочтительно может использоваться датчик MEMS по причине того, что датчик MEMS настолько мал по размеру, что легко устанавливается в корпус 1.
Вибрирующий элемент 2 имеет стержень 20, закрепленный на боковой поверхности корпуса 1, и чистящий компонент 21, установленный на стержне 20. Щетка 210 вставлена в передний конец чистящего компонента 21. Чистящий компонент 21 является расходной деталью и, следовательно, может сниматься со стержня 20 для замены на новую деталь.
Стержень 20 выполнен из полимерного материала. Стержень 20 присоединяется к корпусу 1 через упругий элемент 202, выполненный из эластомера. Стержень 20 является трубчатым элементом с закрытым передним концом (конец на стороне щетки) и имеет подшипник 203 на переднем конце внутри трубки. Дистальный конец вала 30 эксцентрика, присоединенный к валу 11 вращения двигателя 10, вставлен в подшипник 203 стержня 20. Вал 30 эксцентрика имеет груз 300 около подшипника 203, и центр тяжести вала 30 эксцентрика смещен от его центра вращения. Между дистальным концом вала 30 эксцентрика и подшипником 203 обеспечивается небольшой зазор.
Принцип приведения в действие электрической зубной щетки
ЦПУ 120 обеспечивает сигнал приведения в действие, соответствующий режиму работы (такой как сигнал широтно-импульсной модуляции) на двигатель 10, чтобы вращать вал 11 вращения двигателя 10. Вал 30 эксцентрика вращается в соответствии с вращением вала 11 вращения. Однако, поскольку центр тяжести вала 30 эксцентрика смещен, вал эксцентрика совершает движение, как будто закручиваясь вокруг центра вращения. Таким образом, дистальный конец вала 30 эксцентрика постоянно сталкивается с внутренней стенкой подшипника 203, чтобы вызвать высокоскоростную вибрацию (перемещение) стержня 20 и чистящего компонента 21, установленного на стержне. Таким образом, двигатель 10 играет роль средства привода для вибрации (перемещения) щетки, а вал 30 эксцентрика играет роль механизма передачи движения (механизм преобразования движения) для преобразования выходного движения (вращения) двигателя 10 в вибрацию вибрирующего элемента 2.
Для выполнения чистки пользователь может держать корпус 1 в руке и приложить щетку 210, вибрирующую на высокой скорости, к зубам. ЦПУ 120 контролирует продолжительность работы, используя таймер 122, и автоматически останавливает вибрацию щетки по истечении заданного времени (такого, как две минуты).
В электрической зубной щетке согласно настоящему варианту осуществления в вибрирующем элементе 2 размещен вал 30 эксцентрика, служащий в качестве механизма передачи движения, и, в частности, груз 300 установлен около щетки 210. Таким образом, чистящая часть 210 может эффективно вибрировать. При этом, поскольку вибрирующий элемент 2 (стержень 20) прикреплен к корпусу 1 через упругий элемент 202, вибрация вибрирующего элемента 2 слабо передается на корпус 1. Таким образом, может быть уменьшена вибрация корпуса 1 и руки во время чистки зубов и, следовательно, может быть улучшено ощущение при использовании.
Работа электрической зубной щетки
Остатки пищи и бляшка прикрепляются по-разному в зависимости от типа зуба (такого, как зуб верхней челюсти/нижней челюсти и моляр/резец) и участка (язычная/щечная сторона и зубная/окклюзионная поверхность). Таким образом, эффективный режим чистки различается в зависимости от участка зубного ряда, в зависимости от способа применения щетки (угла наклона щетки и давления щетки), способа перемещения, скорости, продолжительности чистки и т.п. Поэтому вычисление того, выполнена ли чистка должным образом, желательно выполнять для каждого участка.
Электрическая зубная щетка согласно настоящему варианту осуществления предназначена для осуществления вычисления чистки для каждого участка, точно оценивая очищаемый участок на основании положения щетки, обнаруженного датчиком 15 ускорения. Хотя существуют различные параметры вычисления, в настоящем документе будут рассмотрены три параметра - продолжительность чистки, угол наклона щетки и давление щетки.
В настоящем варианте осуществления, как показано на фиг.4, верхние и нижние зубные ряды разделены на 12 участков, включающих в себя переднюю щечную сторону верхней челюсти, переднюю язычную сторону верхней челюсти, левую щечную сторону верхней челюсти, левую язычную сторону верхней челюсти, правую щечную сторону верхней челюсти, правую язычную сторону верхней челюсти, переднюю щечную сторону нижней челюсти, переднюю язычную сторону нижней челюсти, левую щечную сторону нижней челюсти, левую язычную сторону нижней челюсти, правую щечную сторону нижней челюсти и правую язычную сторону нижней челюсти. Однако деление зубных рядов этим не ограничивается и зубные ряды могут быть разделены более грубо или более точно. Например, могут учитываться верхние, нижние левые и правые окклюзионные поверхности.
На блок-схемах фиг. 5-8 будет, в частности, описан процесс вычисления чистки. На фиг.5 представлена блок-схема основной программы, а фиг. 6-8 являются блок-схемами, более подробно показывающими процессы основной программы. Процессы, описанные ниже, являются процессами, которые должны выполняться ЦПУ 120 в соответствии с программой, если не указано иначе.
Когда источник питания электрической зубной щетки включен, ЦПУ 120 обнаруживает положение (наклон) щетки на основании данных датчика 15 ускорения (S10). Затем ЦПУ 120 оценивает очищаемый участок на основании положения, обнаруженного на этапе S10 (S20). Затем, ЦПУ 120 измеряет продолжительность чистки (S30), оценивает угол наклона щетки (S40) и определяет давление щетки (S50). Эта информация записывается в памяти для каждого участка (см. фиг.11). Процессы этапов на этапе S10-S50 повторяются каждый раз через определенное время. Когда источник питания выключается или время непрерывной работы достигло заданного времени (такого как две минуты), ЦПУ 120 оценивает результат чистки для каждого участка на основании информации о чистке (продолжительность чистки, угол наклона щетки и давление щетки), записанной в памяти, и выводит результаты вычисления на устройство 110 отображения (S60). Информация о чистке стирается из памяти каждый раз, когда включается источник питания электрической зубной щетки.
Далее в настоящем документе будут подробно описаны процессы этапов на этапе S10-S60.
Определение положения
На фиг.6 - блок-схема процесса определения положения (S10).
ЦПУ 120 получает соответствующие выходные сигналы Ax, Ay, Az по осям x, y, z от датчика 15 ускорения (S100). Выходной сигнал Ax указывает компоненту ускорения в x-направлении, выходной сигнал Ay указывает компоненту ускорения в y-направлении и выходной сигнал Az указывает компоненту ускорения в z-направлении. Когда зубная щетка находится в неподвижном состоянии (когда на датчик 15 ускорения не действует динамическое ускорение), результирующий вектор А Ax, Ay, Az соответствует ускорению свободного падения. В настоящем документе А=(Ax, Ay, Az ) называется вектором положения.
В случае, когда вектор положения А=(Ax, Ay, Az) больше 1,2g (g обозначает ускорение свободного падения) (S101; ДА), то выдается ошибка (S102). Это связано с тем, что когда компонента динамического ускорения в значительной степени включена в выходные сигналы датчика ускорения, направление ускорения свободного падения (то есть пространственное положение щетки) нелегко точно определить. Вместо выдачи ошибки, как на этапе S102, процессы S100 и S101 могут повторяться до тех пор, пока не будут получены выходные сигналы Ax, Ay, Az датчика ускорения с результирующим вектором не менее 1,2g. Пороговое значение определения ошибки не ограничено 1,2g, а может принимать другие значения.
Вычисление очищаемого участка
Фиг. 7 и 8 - блок-схемы процессов вычисления очищаемого участка (S20). На фиг. 9 и 10 - виды, показывающие примеры выходных сигналов Ax, Ay, Az датчика ускорения для каждого очищаемого участка.
Сначала ЦПУ 120 определяет, находится ли участок на верхней челюсти или на нижней челюсти, на основании выходного сигнала Az датчика ускорения в z-направлении (S700). Определение основано на том факте, что при чистке зубного ряда верхней челюсти поверхность щетки повернута вверх более чем немного, а при чистке зубного ряда нижней челюсти повернута вниз более чем немного. Участок определяется как находящийся на нижней челюсти при Az>0 (S801) и как находящийся на верхней челюсти в случае Az≤0 (S701).
(1) На верхней челюсти
ЦПУ 120 определяет, действительно ли участок является передним зубом, на основании выходного сигнала Ay датчика ускорения в y-направлении (S702). Определение основано на том факте, что корпус 1 зубной щетки относительно горизонтален при чистке переднего зуба, но неизбежно наклоняется при чистке моляра из-за контакта с губами. Участок определяется как передний зуб верхней челюсти при Ay ≤ порогового значения a (S703).
В случае, когда участок определен как передний зуб верхней челюсти, ЦПУ 120 определяет, является ли участок щечной стороной или язычной стороной, на основании выходного сигнала Ax датчика ускорения в x-направлении (S704). Определение основано на факте, что ориентация щетки меняется на противоположную при переходе со щечной стороны на язычную сторону. Участок определяется как передняя щечная сторона верхней челюсти при Ax>0 (S705) и как передняя язычная сторона верхней челюсти при Ax≤0 (S706).
При этом, в случае, когда участок определяется как непередний зуб верхней челюсти на этапе S702, ЦПУ 120 определяет ориентацию щетки на основании выходного сигнала Ax датчика ускорения в x-направлении (S707). Участок определяется как правая щечная сторона верхней челюсти или левая язычная сторона верхней челюсти при Ax>0 (S708) и определяется как левая щечная сторона верхней челюсти или правая язычная сторона верхней челюсти при Ax≤0 (S712).
Правую щечную сторону верхней челюсти и левую язычную сторону верхней челюсти и левую щечную сторону верхней челюсти и правую язычную сторону верхней челюсти нелегко различить только по выходным сигналам датчика ускорения. Поэтому ЦПУ 120 сужает диапазон, к которому принадлежит участок, на основании определения очищаемого участка, проведенного в предыдущем процессе (на один такт раньше) (S709, S713). Конкретно, на этапе S709, когда предыдущий очищаемый участок является любым из передней щечной стороны верхней челюсти, правой щечной стороны верхней челюсти, правой язычной стороной верхней челюсти, передней щечной стороны нижней челюсти, правой щечной стороны нижней челюсти и правой язычной стороны нижней челюсти, текущий очищаемый участок оценивается как правая щечная сторона верхней челюсти (S710), а когда предыдущий очищаемый участок является любым из передней язычной стороны верхней челюсти, левой щечной стороны верхней челюсти, левой язычной стороны верхней челюсти, передней язычной стороны нижней челюсти, левой щечной стороны нижней челюсти и левой язычной стороны нижней челюсти, текущий очищаемый участок оценивается как левая язычная сторона верхней челюсти (S711). На этапе S713, когда предыдущий очищаемый участок является любым из передней щечной стороны верхней челюсти, левой щечной стороны верхней челюсти, левой язычной стороны верхней челюсти, передней щечной стороны нижней челюсти, левой щечной стороны нижней челюсти и левой язычной стороны нижней челюсти, текущий очищаемый участок оценивается как левая щечная сторона верхней челюсти (S714), а когда предыдущий очищаемый участок является любым из передней язычной стороны верхней челюсти, правой щечной стороны верхней челюсти, правой язычной стороны верхней челюсти, передней язычной стороны нижней челюсти, правой щечной стороны нижней челюсти и правой язычной стороны нижней челюсти, текущий очищаемый участок оценивается как правая язычная сторона верхней челюсти (S715). Такое вычисление выполняется на основании высокой вероятности того, что смена очищаемого участка выполняется таким образом, чтобы максимально уменьшить объем перемещений щетки и изменений ориентации.
(2) На нижней челюсти
ЦПУ 120 определяет, действительно ли участок является передним зубом, на основании выходных сигналов Ay датчика ускорения в y-направлении (S802). Определение основано на том факте, что корпус 1 зубной щетки относительно горизонтален при чистке переднего зуба, но неизбежно наклоняется при чистке моляра из-за контакта с губами. Участок определяется как передний зуб верхней челюсти при Ay ≤ пороговое значение a (S803).
В случае, когда часть определена как передний зуб нижней челюсти, ЦПУ 120 определяет, является ли часть щечной стороной или язычной стороной, на основании выходного сигнала Ax датчика ускорения в x-направлении (S804). Определение основано на факте, что ориентация щетки меняется на противоположную при переходе со щечной стороны на язычной стороне. Участок определяется как передняя щечная сторона нижней челюсти при Ax<0 (S805) и как передняя язычная сторона нижней челюсти при Ax≥0 (S806).
При этом, в случае, когда участок определяется как непередний зуб нижней челюсти на этапе S802, ЦПУ 120 определяет ориентацию щетки на основании выходного сигнала Ax датчика ускорения в x-направлении (S807). Участок определяется как правая щечная сторона нижней челюсти или левая язычная сторона нижней челюсти при Ax>0 (S808) и определяется как левая щечная сторона нижней челюсти или правая язычная сторона нижней челюсти при Ax≤0 (S812).
На S809, когда предыдущий очищаемый участок является любым из передней щечной стороны нижней челюсти, правой щечной стороны нижней челюсти, правой язычной стороны нижней челюсти, передней щечной стороны нижней челюсти, правой щечной стороны верхней челюсти и правой язычной стороны верхней челюсти, текущий очищаемый участок оценивается как правая щечная сторона нижней челюсти (S810), а когда предыдущий очищаемый участок является любым из передней язычной стороны нижней челюсти, левой щечной стороны нижней челюсти, левой язычной стороны нижней челюсти, передней язычной стороны верхней челюсти, левой щечной стороны верхней челюсти и левой язычной стороны верхней челюсти, текущий очищаемый участок оценивается как левая язычная сторона нижней челюсти (S811). На этапе S813, когда предыдущий очищаемый участок является любым из передней щечной стороны нижней челюсти, левой щечной стороны нижней челюсти, левой язычной стороны нижней челюсти, передней щечной стороны верхней челюсти, левой щечной стороны верхней челюсти и левой язычной стороны верхней челюсти, текущий очищаемый участок оценивается как левая щечная сторона нижней челюсти (S814), а когда предыдущий очищаемый участок является любым из передней язычной стороны нижней челюсти, правой щечной стороны нижней челюсти, правой язычной стороны нижней челюсти, передней язычной стороны верхней челюсти, правой щечной стороны верхней челюсти и правой язычной стороны верхней челюсти, текущий очищаемый участок оценивается как правая язычная сторона нижней челюсти (S815).
В вышеупомянутых процессах текущий очищаемый участок определяется как любой из передней щечной стороны верхней челюсти (S705), передней язычной стороны верхней челюсти (S706), правой щечной стороны верхней челюсти (S710), левой язычной стороны верхней челюсти (S711), левой щечной стороны верхней челюсти (S714), правой язычной стороны верхней челюсти (S715), передней щечной стороны нижней челюсти (S805), передней язычной стороны нижней челюсти (S806), правой щечной стороны нижней челюсти (S810), левой язычной стороны нижней челюсти (S811), левой щечной стороны нижней челюсти (S814) и правой язычной стороны нижней челюсти (S815).
Приведенный алгоритм определения - это только пример, и может использоваться любой алгоритм определения, при условии, что очищаемый участок может быть идентифицирован по выходным сигналам Ax, Ay, Az датчика ускорения. Например, не только величины Ax, Ay, Az используются как переменные для непосредственного определения, но также для определения могут использоваться и вторичные переменные, полученные, соответственно, сочетанием Ax, Ay, Az. Например, вторичные переменные могут быть произвольно установлены равными Ay/Az, Ax·· Ax+Ay·Ay, Az-Ax, или подобными. Альтернативно, очищаемый участок может быть определен после того, как информация об ускорении по осям Ax, Ay, Az преобразуется в информацию об углах (углы положения) α, β, γ, как показано на фиг.30. В примере на фиг.30 угол оси x относительно направления ускорения свободного падения определяется как угол крена α, угол оси Y относительно направления ускорения свободного падения определяется как угол тангажа β, а угол оси Z относительно направления ускорения свободного падения определяется как угол γ рыскания. Пороговые значения, используемые для определения, могут быть определены из результатов клинического эксперимента или подобного.
Измерение продолжительности чистки
На фиг.11 показан один пример информации о чистке, записанный в память. На фиг.11 показан пример состояния, когда чистке подвергается участок на левой щечной стороне нижней челюсти. Перед чисткой левой щечной стороны нижней челюсти в течение 7,5 секунд чистят участок на передней щечной стороне верхней челюсти, а участок на левой щечной стороне верхней челюсти чистят в течение 12,2 секунд. Символ "-" указывает, что никакие данные еще не записаны, то есть, что этот участок еще не почищен.
На этапе S30 ЦПУ 120 подсчитывает продолжительность чистки очищаемого участка (на левой щечной стороне нижней челюсти в примере на фиг.11), определенного в результате вычисления на этапе S20. Например, когда процессы на этапах S10-S50 на фиг.6 выполняются один раз в 0,1 секунды, продолжительность чистки на левой щечной стороне нижней челюсти подсчитывается путем последовательного прибавления + 0,1 до значения 2,1 секунды.
Накопленное значение продолжительности чистки записывается как информация о чистке. Таким образом, например, в случае, когда очищаемым участком снова становится участок на левой щечной стороне верхней челюсти, продолжительность чистки, сохраненная в памяти, не сбрасывается, а прибавляется к сохраненному значению 12,2 секунды.
Вычисление угла наклона щетки
На этапе S40 ЦПУ 120 оценивает угол наклона щетки на основании положения, определенного на этапе S10 (выходного сигнала датчика ускорения), и обновляет значение угла наклона щетки на очищаемом в настоящий момент участке (на левой щечной стороне нижней челюсти в примере на фиг.11). При этом ЦПУ 120 предпочтительно вычисляет и записывает среднее значение угла наклона щетки, исходя из значения хранящегося в памяти угла наклона щетки и оцениваемого в настоящее время значения.
Угол наклона щетки - это угол наложения щетки относительно оси зуба (продольная ось зуба). Верхний вид на фиг.12 показывает состояние, когда угол наклона щетки равен 15°, средний вид показывает состояние, когда угол наклона щетки - 45°, и нижний вид показывает состояние, когда угол наклона щетки - 90°. Для эффективного вычищения остатков пищи и бляшки из пародонтального кармана или межзубного промежутка щетка может быть перемещена таким образом, чтобы кончики щетки заходили в пародонтальный карман и межзубный промежуток. Поэтому предпочтительным является угол наклона щетки в диапазоне от 35° до 55°.
Угол наклона щетки может быть оценен, например, по компоненте ускорения Az в направлении z. Это происходит потому, что величина Az значительно изменяется в зависимости от угла наклона щетки. Как показано на фиг.13, Az почти равно нулю в случае, когда угол наклона щетки составляет приблизительно 90°, и величина Az постепенно увеличивается по мере уменьшения угла наклона щетки. Поскольку компонента ускорения Ax в направлении x также изменяется в зависимости от угла наклона щетки, предпочтительно оценивать угол наклона щетки по Ax, а не по Az, или оценивать угол наклона щетки и по Ax, и по Az (направление результирующего вектора Ax и Az). Угол наклона щетки может вычисляться на основании непрерывной величины или примерного вычисления, такого как "менее 35°", "35-55°" и "не менее 55°".
Измерение давления щетки
На этапе S50 ЦПУ 120 вычисляет давление щетки на основании выходных сигналов датчика 17 нагрузки и обновляет величину давления щетки очищаемого участка (на левой щечной стороне нижней челюсти в примере на фиг.11). При этом ЦПУ 120 предпочтительно вычисляет и записывает среднее значение давления щетки из величины хранящегося в памяти давления щетки и значения, определенного в данный момент.
Когда давление щетки слишком мало, сила удаления зубного камня снижена. Наоборот, когда давление щетки слишком большое, существует вероятность возникновения проблемы, заключающейся в уменьшении срока службы щетки или увеличении нагрузки на десну. Давление щетки в электрической зубной щетке может быть меньше, чем у обычной зубной щетки. Следовательно, считается, что большинство людей, которые только что начали использовать электрическую зубную щетку, склонны прикладывать к щетке чрезмерное давление. Оптимальная величина давления на щетку составляет приблизительно 100 г.
Вычисление и выведение результата чистки
ЦПУ 120 оценивает результат чистки для каждого участка на основании информации о чистке, записанной в памяти 121, и выводит результаты вычисления на устройство 110 отображения (дисплей 111).
На фиг.14 представлен пример вывода результата вычисления продолжительности чистки. ЦПУ 120 считывает продолжительность чистки для каждого участка из памяти 121 и оценивает, например, продолжительность менее 7 секунд как "недостаточную", продолжительность от 7 до 15 секунд как "приемлемую" и продолжительность более 15 секунд как "чрезмерную". Результат вычисления посылается в устройство 110 отображения. Зубной ряд рисуют на дисплее 111 устройства 110 отображения и соответствующий участок зубного ряда подсвечивается цветом в соответствии с результатом вычисления (например, белый цвет для "недостаточной", желтый для "приемлемой" и красный для "чрезмерной"). Посмотрев на такой дисплей, пользователь может быстро понять, чистка какого участка зубного ряда является недостаточной (или чрезмерной).
На фиг.15 представлен пример вывода результата вычисления угла наклона щетки. Например, угол наклона щетки оценивается по трем диапазонам - "менее 35°", "35-55°" и "не менее 55°", и каждый участок зубного ряда подсвечивается цветом в соответствии с результатом вычисления. В случае, когда чистка выполнялась под неправильным углом наклона щетки, сила удаления зубного камня меньше, чем при оптимальном угле наклона щетки. Таким образом, существует вероятность того, что желательный чистящий эффект не получается, хотя чистка занимает время. Когда вычисление угла наклона щетки для каждого участка выводится, как на фиг.15, пользователь может узнать о чистке под правильным углом наклона щетки.
На фиг.16 представлен пример вывода результата вычисления давления щетки. Например, результат менее 80 г оценивается как "недостаточный", от 80 до 150 г оценивается как "приемлемый", а более 150 г оценивается как "чрезмерный". Каждый участок зубного ряда подсвечивается цветом в соответствии с результатом вычисления. Когда давление щетки является неправильным, как описано выше, существует вероятность возникновения проблемы, заключающейся в снижении очищающей силы, уменьшении срока службы щетки или увеличения нагрузки на десну. Тем не менее, пользователю трудно понять, сколько силы требуется прибавить для получения оптимального давления щетки. При этом, если вычисление давления щетки для каждого участка выведено, как на фиг.16, пользователь может уяснить правильное давление щетки и также знать о чистке зубов при правильном давлении щетки.
На фиг.17 представлен пример вывода результата комплексного вычисления чистки. Комплексное вычисление чистки указывает комплекс показателей для всестороннего определения множества критериев вычисления (продолжительности чистки, угла наклона щетки и давления щетки) и показывает степень успешности чистки. Формула для определения комплексного вычисления чистки может быть определена любым способом. В настоящем варианте осуществления продолжительность чистки и давление щетки соответственно оцениваются в диапазоне 1-35, а угол наклона щетки оценивается в диапазоне 1-30. Сумма величин вычисления (в диапазоне 1-100) используется в качестве комплексного показателя чистки. В примере на фиг.17 значение до 80 оценивается как "отличное", от 60 до 80 оценивается как "хорошее", а менее 60 оценивается как "плохое". При выведении данных такого всестороннего вычисления пользователю могут даваться более полезные рекомендации.
С помощью конструкции согласно описанному выше настоящему варианту осуществления, используя выходные сигналы датчика ускорения, может быть очень точно определено положение щетки и очищаемый участок может быть идентифицирован с большей точностью и большим разрешением, чем в предшествующем уровне техники. Поэтому может быть оценен результат чистки для участка, выделенного более точно, чем в предшествующем уровне техники, и пользователю могут быть предоставлены очень полезные и достоверные рекомендации. Кроме того, поскольку датчик ускорения имеет небольшой размер, существует преимущество, заключающееся в том, что датчик ускорения может быть легко встроен в корпус электрической зубной щетки.
Результаты вычисления фиг. 14-17 могут отображаться на дисплее 111 одновременно или отображаться один за другим. В последнем случае дисплей может переключаться автоматически или с помощью воздействия пользователя на кнопку.
В вышеупомянутом варианте осуществления результат автоматически отображается, когда источник питания зубной щетки выключается. Однако предполагается, что чистка выполняется в месте, отличном от места установки устройства отображения. Таким образом, например, предпочтительно обеспечивается функция посылки информации о чистке от корпуса зубной щетки на устройство отображения, когда пользователь нажимает на кнопку, имеющуюся на устройстве отображения или корпусе зубной щетки, и отображения результата на устройстве отображения.
Информация о чистке и результат вычисления, накопленные в памяти, могут быть распечатаны. Например, в зарядное устройство или устройство отображения может быть установлен принтер, или данные для распечатки могут быть посланы из корпуса зубной щетки, зарядного устройства или устройства отображения на внешний принтер. Также предпочтительна функция отправления данных информации о чистке и результатов вычисления на внешнее устройство (персональный компьютер, сотовый телефон, PDA или подобное) по беспроводной связи или проводной связи. В корпусе зубной щетки, зарядном устройстве, устройстве отображения или подобном устройстве может быть обеспечен слот для карты памяти, чтобы данные информации о чистке и результаты вычисления могли быть записаны в карте внешней памяти.
Оптимальные значения (целевые значения) продолжительности чистки, угла наклона щетки и давления щетки могут быть установлены различными для каждого участка. Например, для поверхности моляра (боковая поверхность) угол наклона щетки, равный 35-55°, является предпочтительным для эффективного удаления кончиками щетки остатков пищи и бляшки из пародонтального кармана и межзубного промежутка. При этом для переднего зуба, имеющего относительно большую поверхность зуба, предпочтителен угол больше, чем вышеупомянутый угол наклона щетки (такой, как 55-90°). Угол наклона щетки, равный приблизительно 0°, предпочтителен для окклюзионной поверхности моляра. Кроме того, оптимальная продолжительность чистки, угол наклона щетки и давление щетки могут быть определены не с точки зрения результата чистки, а с точки зрения недопущения повреждения ткани, такой как десна. Когда для каждого участка установлены оптимальные величины и выполнено вычисление, могут обеспечиваться более полезные и надежные рекомендации на основании вычисления.
Второй вариант осуществления
На фиг.18 представлена блок-схема процесса вычисления чистки согласно второму варианту осуществления. В первом варианте осуществления результат чистки выводится после завершения чистки, тогда как во втором варианте осуществления (S55) в середине чистки выводятся промежуточные результаты. Остальные конфигурации являются такими же, как в первом варианте осуществления.
Согласно процессам по настоящему варианту осуществления чистка может выполняться с одновременным подтверждением изменения продолжительности чистки и комплексного показателя чистки (степени успешности) в режиме реального времени. Таким образом, повышается удобство. С помощью подтверждения результатов вычисления угла наклона щетки и давления щетки пользователь может определить правильность угла наклона щетки и давления щетки. Во втором варианте осуществления функция выведения промежуточного результата угла наклона щетки соответствует рекомендациям об угле наклона щетки по настоящему изобретению.
Третий вариант осуществления
На фиг.19 представлена блок-схема процесса вычисления угла наклона щетки (S40 на фиг.5) согласно третьему варианту осуществления. В настоящем варианте осуществления ЦПУ 120 оценивает угол наклона щетки и затем, в случае необходимости, выводит указания для сообщения пользователю, является ли угол наклона щетки правильным.
Сначала ЦПУ 120 оценивает угол наклона щетки на основании вектора А положения, полученного от датчика ускорения (в частности, компоненты ускорения Az в z-направлении) (S1900). ЦПУ 120 обновляет данные о величине угла наклона щетки для текущего очищаемого участка, оцененного на этапе S20 (S1901). При этом ЦПУ 120 предпочтительно вычисляет и записывает среднее значение угла наклона щетки на основе сохраненного в памяти значения угла наклона щетки и полученного в результате вычисления значения.
Затем ЦПУ 120 сравнивает полученное значение угла наклона щетки и оптимальную величину угла наклона щетки в текущем очищаемом участке (S1902). Например, при условии, что оптимальная величина угла наклона щетки составляет "35-55°", в случае, когда полученное значение угла наклона щетки находится в пределах вышеупомянутого диапазона (S1903; ДА), выводится извещение (указание) уровня 1 (S1904). В случае, когда разность между полученным значением угла наклона щетки и оптимальной величиной составляет не более 15° (то есть, полученное в результате вычисления значение составляет 20-35° или 55-70°) (S1905; ДА), выводится извещение уровня 2 (S1906). В случае, когда разность между полученным в результате вычисления значением и оптимальной величиной составляет не более 30° (то есть, полученное значение составляет 5-20° или 70-85°) (S1907; ДА), выводится извещение уровня 3 (S1908). В случае, когда разность составляет более 30°, не выводится никакого извещения (S1907; НЕТ).
На фиг.20 показан пример изменения в сигнале тревоги в соответствии с углом наклона щетки. В состоянии, когда угол наклона щетки составляет 90°, не выводится никакого извещения. Когда щетка постепенно поворачивается, в тот момент времени, когда угол наклона щетки составляет 85°, выводится одиночный сигнал тревоги уровня 3. Когда щетка поворачивается дальше, в момент времени, когда угол наклона щетки составляет 70°, выводится два звуковых сигнала, являющиеся сигналами тревоги уровня 2, в момент времени, когда угол наклона щетки составляет 55°, что является оптимальной величиной, выводятся три звуковых сигнала, являющиеся сигналом тревоги уровня 1.
С помощью изменения сигнала тревоги пользователь может понять, что угол наклона щетки приближается к оптимальной величине и, следовательно, угол наклона щетки может легко соответствовать оптимальной величине. Поскольку работа происходит быстро и приятно, зубная щетка полезна как инструмент обучения для обучения детей правильному углу наклона щетки.
В дополнение к звуку, в качестве способа извещения могут использоваться свет, вибрация и голос. В случае использования света цвет или характер мигания может изменяться в соответствии с уровнем. В случае вибрации может изменяться сила и продолжительность вибрации в соответствии с уровнем. В случае голоса могут быть выдаваться сообщения, такие как "наклоните зубную щетку еще примерно на 30° больше", "наклоните зубную щетку немного больше" и "это оптимальный угол наклона щетки".
В настоящем варианте осуществления производится извещение о том, что угол наклона щетки является оптимальной величиной. Наоборот, не может быть выведено никакого извещения, когда угол наклона щетки является оптимальной величиной, и извещение (предупреждение) может быть выведено, когда угол наклона щетки выходит за рамки оптимальной величины.
Четвертый вариант осуществления
На фиг.21 представлена блок-схема процесса вычисления чистки согласно четвертому варианту осуществления. Этот вариант осуществления отличается от второго варианта осуществления тем, что добавлен процесс определения и указания участка, который следует чистить следующим, на основании результатов чистки для каждого участка (S56, S57). Другие конфигурации являются такими же, как во втором варианте осуществления.
Когда результат чистки для очищаемого участка обновляется в процессах S10-S55, ЦПУ 120 определяет, достигнута ли цель чистки для очищаемого участка (S56). Например, ЦПУ может определить, достигнута ли цель, определяя, достигает ли продолжительность чистки 10 секунд, превышает ли результат чистки 80, или тому подобное. В случае, когда цель не достигнута (S56; НЕТ), чистка очищаемого участка должна быть продолжена, и, следовательно, процесс возвращается к процессу S10. В случае, когда цель достигнута (S56; ДА), чистка очищаемого участка заканчивается и следует чистить другие участки, и, следовательно, процесс переходит к процессу S57.
На этапе S57 ЦПУ 120 обращается к результату чистки каждого участка и выбирает в качестве цели недочищенный участок (то есть участок, который еще недостаточно почищен). В случае, когда имеется множество недочищенных участков, участком, который следует чистить следующим, является тот участок, к которому легко перемещается зубная щетка от текущего очищаемого участка. В целом, можно сказать, что непрерывное перемещение щетки без отрыва щетки от зуба эффективно для того, чтобы не оставить неочищенных участков. Следовательно, например, данные для схемы, определяющей порядок чистки с непрерывным перемещением щетки, такой как порядок левая щечная сторона верхней челюсти, передняя щечная сторона нижней челюсти, правая щечная сторона верхней челюсти, правая щечная сторона нижней челюсти, передняя щечная сторона нижней челюсти, левая щечная сторона нижней челюсти, левая язычная сторона нижней челюсти, передняя язычная сторона нижней челюсти, правая язычная сторона нижней челюсти, правая язычная сторона верхней челюсти, передняя язычная сторона верхней челюсти, левая язычная сторона верхней челюсти подготавливаются заранее, и участок, который будут чистить следующим, может быть определен в соответствии с этим порядком чистки. ЦПУ 120 отображает определенный участок, который будут чистить следующим, на устройстве 110 отображения. Например, соответствующий участок зубного ряда может мигать или быть подсвечен заданным цветом.
При таком руководстве чистка может быть выполнена эффективно, не оставляя неочищенных участков. Таким образом, участок, который будут чистить следующим, выбирается из участков, которые еще недостаточно вычищены. Таким образом, не остается невычищенных участков и устраняются ненужные действия, такие как повторная чистка одного и того же участка. В зубной щетке согласно настоящему варианту осуществления определяется участок, который чистят в настоящее время. Таким образом, даже в случае, когда пользователь чистит другой участок вопреки указанию, результат чистки может быть правильно записан и оценен, и указание по порядку чистки может быть соответствующим образом скорректировано.
ЦПУ 120 может определить, чистит ли пользователь участок, следуя указанию. Например, как показано на блок-схеме на фиг.22, после вычисления очищаемого участка (S20) ЦПУ 120 определяет, является ли очищаемый участок тем участком, который требуется чистить в соответствии с руководством (S25). В случае, когда этот участок не является тем участком, который должны были чистить (S25; НЕТ), может поступить указание сменить очищаемый участок (S57). В случае, когда пользователь должен неоднократно чистить уже почищенный участок или подобных случаях, смена очищаемого участка одобряется. Таким образом, чистка может выполняться эффективно.
Пятый вариант осуществления
На фиг.23 представлена блок-схема электрической зубной щетки согласно пятому варианту осуществления. Электрическая зубная щетка согласно настоящему варианту осуществления снабжена многокоординатным (в настоящем документе - трехкоординатный) гироскопом 16 в корпусе 1. В зарядном устройстве 100 обеспечиваются дисплей 111 и блок 112 приема данных. Фиг.24 - вид в перспективе внешнего вида зарядного устройства 100 согласно пятому варианту осуществления. Этот дисплей 111 может быть образован жидкокристаллической панелью или светоизлучающим элементом, таким как светодиод.
Гироскоп 16 устанавливается для определения угловой скорости по оси Z, угловой скорости по оси X и угловой скорости по оси Y. В качестве гироскопа 16 может использоваться любой тип гироскопа, включая вибрирующий гироскоп, оптический гироскоп и механический гироскоп. Однако предпочтительно использование датчика MEMS, поскольку датчик MEMS имеет небольшие размеры и легко помещается в корпус 1. Может использоваться не гироскоп, определяющий скорость, для выведения угловой скорости, а гироскоп, интегрирующий скорость, или гироскоп, определяющий положение для выведения угла. Для устранения шума от вибрации щетки (такого, как частотная составляющая приблизительно 100-300 Гц, служащая приводной частотой щетки) может использоваться полосовой фильтр для выходных сигналов гироскопа.
Когда корпус 1 зубной щетки находится в неподвижном состоянии (например, в состоянии, когда щетка постоянно наложена на один очищаемый участок), выходные сигналы датчика 15 ускорения по существу включают в себя только компоненты ускорения свободного падения. В этом случае может быть точно определено пространственное положение щетки. Таким образом, могут быть точно оценены очищаемый участок и угол наклона щетки. Однако, когда корпус 1 зубной щетки находится в состоянии перемещения (например, когда щетка перемещается от одного очищаемого участка к другому очищаемому участку), выходные сигналы датчика 15 ускорения могут включать в себя не только компоненты ускорения свободного падения, а также и компоненты динамического ускорения. При вычислении пространственного положения компоненты динамического ускорения являются ненужными сигнальными компонентами (шумом). При этом, когда корпус 1 зубной щетки находится в неподвижном состоянии, выходных сигналов гироскопа 16 не наблюдается. Значительные сигналы выводятся только тогда, когда корпус 1 зубной щетки перемещается. В настоящем варианте осуществления пространственное положение зубной щетки определяется на основании выходных сигналов датчика 15 ускорения и гироскопа 16, используя такое различие в характеристиках датчиков.
Конкретно, в процессе определения положения (S10), ЦПУ 120 сначала получает выходные сигналы датчика 15 ускорения и выходные сигналы гироскопа 16. Когда абсолютные величины выходных сигналов гироскопа 16 меньше заданных пороговых значений, ЦПУ 120 расценивает корпус 1 зубной щетки как неподвижный, и определяет пространственное положение по выходным сигналам Ax, Ay, Az датчика 15 ускорения. Если любая из абсолютных величин выходных сигналов гироскопа 16 не меньше заданного порогового значения, ЦПУ 120 оценивает компоненты динамического ускорения в x-, y- и z-направлениях по выходным сигналам гироскопа 16 и корректирует значения Ax, Ay, Az. Таким образом, компоненты динамического ускорения, включенные в Ax, Ay, Az, компенсируются и пространственное положение щетки может быть вычислено точно.
Вместо корректировки выходных сигналов датчика ускорения с помощью выходных сигналов гироскопа, в случае получения выходных сигналов гироскопа положение щетки может быть не определено. Таким образом, только когда выходные сигналы гироскопа меньше заданных пороговых значений, процессы включают в себя определение положения, вычисление очищаемого участка, измерение продолжительности чистки, вычисление угла наклона щетки и определение давления щетки. Таким образом, результат чистки записывается и оценивается только когда положение, оцененное по выходным сигналам датчика ускорения, является достоверным до некоторой степени.
Величина изменения угла Δθyz относительно оси X, величина изменения угла Δθzx относительно оси Y и величина изменения угла Δθxy относительно оси Z может быть вычислена по выходным сигналам гироскопа, и вектор положения А'=(Ax', Ay', Az'), полученный в процессе определения положения на один такт раньше, может быть повернут на угол (Δθyz, Δθzx, Δθxy), таким образом вычисляя текущий вектор положения А=(Ax, Ay, Az). Положение электрической зубной щетки может быть вычислено и оценено, исходя из информации об угле α крена, угле β тангажа и угле γ рыскания (см. фиг.30), вместо информации об ускорении Ax, Ay, Az.
При конфигурации согласно описанному выше настоящему варианту осуществления пространственное положение электрической зубной щетки может быть определено с высокой точностью путем комбинирования выходных сигналов датчика ускорения и гироскопа (включая выбор любых из выходных сигналов датчика ускорения и гироскопа согласно условиям). В случае электрической зубной щетки со способом низких частот, требующих множества поступательных движений, информация о положении может быть с достаточной точностью получена даже с помощью комбинации датчика ускорения и полосового фильтра. Однако, в случае способа крена генерируются трехмерные волнообразные движения корпуса зубной щетки. Таким образом, коэффициент ошибки вели при использовании только информации об ускорении, и существуют опасения, что точность определения положения снижается. В таком случае эффективен способ использования информации об угловой скорости, полученной от гироскопа, согласно настоящему варианту осуществления.
Шестой вариант осуществления
На фиг.25 представлена блок-схема шестого варианта осуществления. В настоящем варианте осуществления сначала ЦПУ 120 определяет, приложена ли нагрузка к щетке, исходя из выходных сигналов датчика 17 нагрузки (S5). Например, когда выходные значения датчика 17 нагрузки превышают заданные пороговые значения, ЦПУ 120 может расценить это как "нагрузка приложена к щетке". До тех пор пока нагрузка прилагается к щетке, последующие процессы находятся в режиме ожидания (S5; НЕТ).
Когда нагрузка не прилагается к щетке, высока вероятность перемещения щетки между участками. Поскольку положение щетки при перемещении в значительной степени изменяется, точность вычисления очищаемого участка снижается, и в первую очередь, при перемещении неправильно записывается и оценивается продолжительность чистки, угол наклона щетки и т.п. Таким образом, поскольку в настоящем варианте осуществления, до тех пор пока к щетке не прилагается нагрузка, процессы, такие как определение положения, вычисление очищаемого участка, измерение времени чистки, вычисление угла наклона щетки, определение давления щетки и выведение результата чистки блокировано, исключаются ненужные процессы и также увеличивается надежность точности и вычисления.
Седьмой вариант осуществления
На фиг.26 представлена чистящая часть электрической зубной щетки согласно седьмому варианту осуществления. Электрическая зубная щетка согласно настоящему варианту осуществления снабжена температурным датчиком 18 для определения температуры чистящей части. Температурный датчик 18 установлен на обратной поверхности щетки. В качестве температурного датчика 18 может быть использован любой тип датчика, включая инфракрасный датчик и терморезистор.
На фиг. 27 и 28 представлены блок-схемы процессов вычисления очищаемого участка (S20). Процессы отличаются от процессов вычисления очищаемого участка согласно первому варианту осуществления (фиг. 7 и 8) тем, что щечную сторону отличают от язычной стороны на основании выходных сигналов температурного датчика 18.
В процессе на верхней челюсти на фиг.27 после определения левая щечная сторона верхней челюсти или правая язычная сторона верхней челюсти на основании выходных данных датчика 15 ускорения (S708) ЦПУ 120 определяет, находится ли выходное значение температурного датчика 18 в пределах заданного диапазона (S2709). Когда щетка находится на щечной стороне, температурный датчик 18 входит в контакт с внутренней поверхностью щеки или находится вблизи нее. Таким образом, может быть получено выходное значение, близкое к температуре тела. При этом, когда щетка находится на язычной стороне, температурный датчик 18 входит в контакт с внешним воздухом. Таким образом, может быть получено выходное значение, которое ниже температуры тела. Поэтому, например, ЦПУ 120 определяет участок как правую щечную сторону верхней челюсти в случае, когда выходное значение температурного датчика 18 находится в пределах диапазона от 36 до 38 градусов (S710), и определяет участок как левую язычную сторону верхней челюсти в других случаях (S711). Точно так же на основании выходного значения температурного датчика 18 можно отличить левую щечную сторону верхней челюсти от правой язычной стороны верхней челюсти (S2713). Также в процессе на нижней челюсти можно отличить левую язычную сторону нижней челюсти от правой щечной стороны нижней челюсти (S2809) и правую язычную сторону нижней челюсти от левой щечной стороны нижней челюсти (S2813).
Восьмой вариант осуществления
На фиг.31 представлена чистящая часть электрической зубной щетки согласно восьмому варианту осуществления. В седьмом варианте осуществления информация о температуре температурного датчика 18 используется для определения очищаемого участка (различения щечной стороны и язычной стороны). Однако в этом седьмом варианте осуществления используется информация об изображении.
Как показано на фиг.31, на переднем конце головки зубной щетки в направлении y обеспечивается камера 19. В качестве камеры 19 может быть использована любая камера, включая камеру, чувствительную к видимому свету, и камеру инфракрасного излучения, если эта камера способна получать информацию об изображении в полости рта. Камера инфракрасного излучения должна контролировать излученное тепло (также называется термограф). Поскольку существует возможность, что при чистке зубов в полости рта темно, можно сказать, что камера инфракрасного излучения предпочтительнее камеры, чувствительной к видимому свету. В настоящем варианте осуществления достаточно видеть профиль небного язычка, как описано ниже. Таким образом, разрешающая способность камеры необязательно должна быть очень высокой.
Как и в седьмом варианте осуществления, ЦПУ 120 определяет участок как левую щечную сторону верхней челюсти или правую язычную сторону верхней челюсти на основании выходных сигналов датчика 15 ускорения (см. процесс S708 на фиг.27). Затем ЦПУ 120 получает изображение от камеры 19 и обнаруживает на изображении небный язычок. Для определения небного язычка может быть использована известная из уровня техники методика анализа изображения. Например, считается, что профиль небного язычка обнаруживается с помощью процесса выделения краев или преобразованием Хафа, или небный язычок обнаруживается путем сравнения с шаблоном. Когда щетка находится на язычной стороне, конец передней поверхности головки щетки направлен в сторону горла. Таким образом, существует высокая вероятность того, что будет найдено изображение небного язычка. При этом, когда щетка находится на щечной стороне, небный язычок на изображении не обнаруживается. Поэтому ЦПУ 120 определяет участок как правую язычную сторону верхней челюсти в случае, когда небный язычок может быть обнаружен, и определяет участок как левую щечную сторону верхней челюсти в случае, когда небный язычок не обнаруживается. Точно так же можно отличить левую щечную сторону верхней челюсти от правой язычной стороны верхней челюсти, левую язычную сторону нижней челюсти от правой щечной стороны нижней челюсти и правую язычную сторону нижней челюсти от левой щечной стороны нижней челюсти.
Кроме того, можно также различить в качестве очищаемых участков левые и правые окклюзионные поверхности. Участок может определяться как являющийся или не являющийся окклюзионной поверхностью на основании, например, компоненты ускорения Ax в x-направлении. Это возможно, поскольку при чистке окклюзионной поверхности поверхность щетки по существу горизонтальна и выходной сигнал Ax практически равен нулю. Участок может быть также определен как являющийся или не являющийся окклюзионной поверхностью на основании компоненты ускорения Az в z-направлении и угла γ рыскания. Участок может быть определен как расположенный на верхней челюсти или на нижней челюсти по ориентации вверх и вниз небного язычка и может быть определен как расположенный на левой стороне или на правой стороне по положению небного язычка на изображении в горизонтальном направлении.
Как было описано выше, в настоящем варианте осуществления очищаемый участок может быть определен более точно, чем в первом варианте осуществления. Например, верхние и нижние зубные ряды могут быть разделены на 16 участков, включая переднюю щечную сторону верхней челюсти, переднюю язычную сторону верхней челюсти, левую щечную сторону верхней челюсти, левую язычную сторону верхней челюсти, левую окклюзионную поверхность верхней челюсти, правую щечную сторону верхней челюсти, правую язычную сторону верхней челюсти, правую окклюзионную поверхность верхней челюсти, переднюю щечную сторону нижней челюсти, переднюю язычную сторону нижней челюсти, левую щечную сторону нижней челюсти, левую язычную сторону нижней челюсти, левую окклюзионную поверхность нижней челюсти, правую щечную сторону нижней челюсти, правую язычную сторону нижней челюсти и правую окклюзионную поверхность нижней челюсти.
В настоящем варианте осуществления, несмотря на то что информация об изображении используется только для различения щечной стороны и язычной стороны, предпочтительно все очищаемые участки определяются с помощью информации об изображении. Однако полость рта является узкой, и нелегко понять все взаиморасположения. Следовательно, все очищаемые участки могут лучше определяться с помощью информации об изображении вместе с информацией о положении от датчика 15 ускорения (датчик ускорения и гироскоп), а не только информацией об изображении. В настоящем варианте осуществления, несмотря на необходимость определения небного язычка, для определения положения и расположения щетки могут распознаваться другие части полости рта (такие как язык, горло, зуб и десна). Например, когда на изображении обнаружен язык или горло, щетка может определяться как расположенная на язычной стороне.
Девятый вариант осуществления
В девятом варианте осуществления реализована конфигурация, в которой определяется положение и очищаемый участок определяется однокоординатным датчиком ускорения.
Верхнее изображение на фиг.32 представляет состояние, когда чистится поверхность зуба на щечной стороне или язычной стороне. При этом угол наклона щетки (угол γ рыскания) составляет приблизительно 90°, компонента ускорения свободного падения в x-направлении составляет приблизительно 1g или -1g (положительное или отрицательное значение соответствуют левой и правой сторонам зубного ряда) и компонента ускорения свободного падения в z-направлении равна по существу нулю. Нижнее изображение на фиг.32 представляет состояние, когда чистится окклюзионная поверхность. При этом угол наклона щетки (угол γ рыскания) равен по существу нулю, компонента ускорения свободного падения в x-направлении равна по существу нулю и компонента ускорения свободного падения в z- направлении составляет приблизительно 1g или -1g (положительное или отрицательное значение соответствуют левой и правой сторонам зубного ряда).
Используя такую характеристику, поверхность зуба на щечной или язычной стороне можно отличить от окклюзионной поверхности только с помощью датчика ускорения по оси x или датчика ускорения по оси Z, и, кроме того, можно различить левую и правую сторону и верхнюю и нижнюю сторону.
Десятый вариант осуществления
Как было описано выше, правую щечную сторону верхней челюсти нелегко отличить от левой язычной стороны верхней челюсти только по выходным сигналам датчика ускорения. Это происходит потому, что не образуется значительной разницы в выходных сигналах датчика ускорения между правой щечной стороной верхней челюсти и левой язычной стороной верхней челюсти. Точно также нелегко отличить левую щечную сторону верхней челюсти от правой язычной стороны верхней челюсти, правую щечную сторону нижней челюсти от левой язычной стороны нижней челюсти и левую щечную сторону нижней челюсти от правой язычной стороны нижней челюсти.
Таким образом, в десятом варианте осуществления в головке щетки обеспечивается множество чувствительных оптических датчиков и очищаемый участок определяется на основании выходных сигналов оптических датчиков и выходных сигналов датчика ускорения. В качестве оптических датчиков могут использоваться фотодиодные датчики, фототранзисторы и т.п.
На фиг. 33(A)-(C) представлена конфигурация электрической зубной щетки согласно десятому варианту осуществления. На фиг.33(A) представлено состояние до прикрепления чистящего компонента 21 к стержню 20 корпуса 1 зубной щетки, а на фиг.33(B) представлено состояние после прикрепления чистящего компонента 21 к стержню 20. Фиг.33(C) является видом фиг.33(B) при рассмотрении в направлении стрелки D3 (обратная сторона поверхности щетки).
Как показано на фиг.33(A), на поверхности стержня 20 обеспечивается четыре оптических датчика 41, 42, 43, 44. Оптические датчики 41-44 соответственно соединены проводами 40 с подложкой схемы в корпусе 1, и подача питания и передача сигнала выполняются по проводам 40. При этом чистящий компонент 21 выполнен из сильно просвечивающего материала. В состоянии, когда чистящий компонент 21 прикреплен к стержню 20, как на фиг.33(B), оптические датчики 41-44 могут обнаружить свет сквозь чистящий компонент 21. Необязательно, чтобы чистящий компонент 21 был полностью выполнен из сильно просвечивающего материала, из сильно просвечивающего материала могут быть выполнены только участки оптических датчиков, или в участках оптических датчиков могут обеспечиваться отверстия. Путем реализации конфигурации, в которой, как описано выше, на стороне корпуса 1 зубной щетки (стержень 20) обеспечиваются оптические датчики, конструкция источника питания оптических датчиков может быть упрощена. Поскольку в чистящем компоненте необязательно обеспечиваются оптические датчики, может быть снижена стоимость чистящего компонента, служащего расходным элементом. Несмотря на то, что существует недостаток, связанный с их стоимостью, чистящий компонент может обеспечиваться оптическими датчиками. Поскольку в качестве конструкции источника питания в этом случае, например, (1) могут обеспечиваться катушки соответственно на чистящем компоненте 21 и на стержне 20 для подачи питания посредством электромагнитной индукции, или (2) могут обеспечиваться электроды или разъемы соответственно на чистящем компоненте 21 и стержне 20, так, чтобы оба были электрически соединены, когда чистящий компонент 21 прикреплен к стержню 20.
Как показано на фиг. В33(B) и (C), в переднем конце головки щетки установлен оптический датчик 41 для определения света в направлении стрелки D1. На боковой поверхности головки щетки установлен оптический датчик 42 для определения света в направлении стрелки D2. На обратной поверхности головки щетки установлен оптический датчик 43 для определения света в направлении D3 и на передней поверхности головки щетки установлен оптический датчик 44 для определения света в направлении стрелки D4. На фиг.34 представлена зависимость между очищаемым участком и выходными сигналами оптических датчиков. В этом примере сила выходного сигнала датчиков (яркость) оценивается по пяти градациям. Например, когда чистится участок на левой щечной стороне верхней челюсти, оптический датчик 43 прилегает близко к щеке, что приводит к "очень темному" состоянию. При этом оптический датчик 44 направлен в полость рта, приводя к "относительно светлому" состоянию. При этом, в случае правой язычной стороны верхней челюсти, которую нелегко отличить от левой щечной стороны верхней челюсти с помощью выходных сигналов датчика ускорения, оптический датчик 43 направлен в полость рта, приводя к "относительно светлому" состоянию, а оптический датчик 44 направлен к десне, приводя к "слегка темному" состоянию. Образуется значительная разница между выходными сигналами оптических датчиков в зависимости от очищаемого участка, как было рассмотрено выше. Таким образом, с помощью различий в выходных сигналах множества оптических датчиков выбор участка, к которому относится очищаемый участок, может быть сужен. При этом очищаемый участок, различимый выходными сигналами оптических датчиков, отличается от очищаемого участка, различимого датчиком 15 ускорения. Таким образом, очищаемый участок может быть точно определен с помощью взаимного дополнения результатов выходных сигналов обоих датчиков.
На фиг.35 представлена блок-схема, показывающая один пример процесса вычисления очищаемого участка. Пороговое значение, используемое для сравнения с выходными сигналами оптических датчиков на этапах на фиг.35, предварительно установлено с помощью эксперимента или чего-либо подобного. На других этапах может использоваться то же самое пороговое значение или может использоваться свое пороговое значение для каждого этапа.
После получения выходных сигналов оптических датчиков 41-44 ЦПУ 120 сначала проверяет, действительно ли все выходные сигналы оптических датчиков больше порогового значения (S3500). В случае, когда все выходные сигналы оптических датчиков больше порогового значения (S3500; ДА), есть вероятность, что головка щетки выведена из полости рта. Поскольку в этом случае определение не может быть выполнено по выходным сигналам оптических датчиков, очищаемый участок определяется только по выходным сигналам датчика ускорения (S3502). В процессе определения S3502, например, может использоваться тот же самый алгоритм, что и в первом варианте осуществления (фиг. 7 и 8).
Затем ЦПУ 120 проверяет, действительно ли все выходные сигналы оптических датчиков меньше порогового значения (S3501). В случае, когда все выходные сигналы оптических датчиков меньше порогового значения, есть вероятность того, что окружающая среда очень затемнена. В этом случае нелегко выполнить определение по выходным сигналам оптических датчиков. Таким образом, очищаемый участок снова определяется только по выходным сигналам датчика ускорения (S3502).
В случае, когда определение может быть выполнено по выходным сигналам оптических датчиков (S3501; НЕТ), ЦПУ 12 сначала проверяет, действительно ли выходной сигнал оптического датчика 41 больше порогового значения (S3503). В случае, когда выходной сигнал оптического датчика 41 больше (S3503; ДА), участок определяют как "передний зуб" (S3504), а в противном случае (S3503; НЕТ) участок определяют как "непередний зуб" (S3505). В случае "непереднего зуба" ЦПУ 12 определяет, располагается ли участок на верхней челюсти (S3506) или нижней челюсти (S3507), на основании выходного сигнала Az датчика ускорения в z-направлении. Затем, в случае верхней челюсти, ЦПУ 12 определяет, является ли участок окклюзионной поверхностью (S3508), левой щечной или правой язычной стороной (S3509), или левой язычной или правой щечной стороной (S3510), на основании выходного сигнала Ax датчика ускорения в x-направлении. Подобно этому, в случае, когда участок расположен на нижней челюсти, ЦПУ 12 определяет, является ли участок окклюзионной поверхностью (S3511), левой щечной или правой язычной стороной (S3512), или левой язычной или правой щечной стороной (S3513), на основании выходного сигнала Ax датчика ускорения в x-направлении.
Затем ЦПУ 12 сравнивает выходной сигнал оптического датчика 42, 43 или 44 с пороговым значением для определения, является ли участок левой стороной (S3514) или правой стороной (S3515). Таким образом, можно отличить левую щечную сторону от правой язычной стороны, и правую щечную сторону от левой язычной стороны, несмотря на то, что их нелегко различить по выходным сигналам датчика ускорения. Процессы, имеющие место после вычисления очищаемого участка (такие, как измерение продолжительности чистки, вычисление угла наклона щетки и определение давления щетки), являются такими же, как в рассмотренных выше вариантах осуществления.
При помощи конфигурации согласно описанному выше настоящему варианту осуществления участок можно точно оценить путем сочетания выходных сигналов двух видов датчиков. Таким образом, для каждого участка может быть оценена степень успешности чистки. Следовательно, пользователю может быть обеспечена очень полезная и достоверная рекомендация на основании вычисления.
Другие
Вышеупомянутые конфигурации вариантов осуществления представляют собой только частные примеры настоящего изобретения. Объем настоящего изобретения не ограничивается вышеупомянутыми вариантами осуществления, но может быть по-разному изменен в пределах объема технического решения. Например, конфигурации вышеупомянутых вариантов осуществления предпочтительно сочетаются друг с другом. В вышеупомянутых вариантах осуществления иллюстрируется вибрационный тип электрической зубной щетки с эксцентриковым грузом. Однако настоящее изобретение может быть применено к электрическим зубным щеткам с другим типом движений. Например, настоящее изобретение может быть применено к электрическим зубным щеткам, использующим вращательное возвратно-поступательное движение, линейное возвратно-поступательное движение, или вихревое движение щетины щетки, или комбинацию их переключений. В этом случае режим работы может переключаться путем переключения частоты движений в соответствии с очищаемым участком или путем переключения между вращательным возвратно-поступательным движением и линейным возвратно-поступательным движением. Настоящее изобретение может также предпочтительно относиться к электрической зубной щетке, имеющей ультразвуковой вибрирующий элемент в участке щетки для чистки с помощью вибрации щетки и ультразвуковой волны.
Для дальнейшего повышения точности определения положения щетки и точности вычисления очищаемого участка и угла наклона щетки количество движений и относительное положение щетки относительно опорного положения предпочтительно вычисляется по выходным сигналам датчика ускорения и гироскопа. В качестве опорного положения может быть установлено положение в момент включения источника питания, может обеспечиваться механизм, при котором пользователь вводит исходное положение (положение, когда начинается чистка) (например, пользователь нажимает выключатель в состоянии, когда корпус зубной щетки расположен горизонтально и щетка приложена к участку на передней щечной стороне верхней челюсти). Количество движений (расстояние перемещения) может быть вычислено путем двойного интегрирования соответствующих динамических компонент ускорения в x-направлении, y-направлении и z-направлении, полученных из выходных данных датчика ускорения. Однако во время вычисления количества движений система координат x, y, z зубной щетки преобразуется в систему координат X, Y, Z, в которой направление ускорения свободного падения совпадает с осью Z (вышеупомянутое опорное положение может быть началом координат). Например, может быть определено относительное положение относительно опорного положения (начального положения) путем вычисления и накопления соответствующих расстояний перемещения X, Y, Z для одного такта. Когда относительное положение по отношению к опорному положению определено, может быть более точно определен очищаемый участок, более конкретно, чем в вышеупомянутых вариантах осуществления. Кроме того, положение щетки предпочтительно вычисляется с помощью информации об ориентации, полученной от магнитного датчика или чего-либо подобного. Для извлечения компоненты динамического ускорения из выходных сигналов датчика ускорения может использоваться полосовой фильтр, такой как фильтр высоких частот. При этом для устранения шума от вибрации щетки предпочтительно вырезается частотная компонента от приблизительно 100 до 300 Гц, соответствующая частоте привода щетки. Количество движений и направление движения предпочтительно более точно вычисляются путем сочетания с гироскопом. Дополнительно, что касается переднего зуба, положение щетки изменяется на 180° в зависимости от того, какой рукой, правой или левой, держат корпус зубной щетки. Таким образом, пользователь регистрирует ведущую руку (рука, держащая зубную щетку), и может быть изменен алгоритм определения очищаемого участка, или может быть изменен режим работы (направление вращения двигателя, перемещение щетки) в соответствии с определенной зарегистрированной рукой.
В вышеупомянутых вариантах осуществления оцениваются три показателя - продолжительность чистки, угол наклона щетки и давление щетки. Однако может оцениваться только один из них. Дополнительно, предпочтительно добавляются другие показатели вычисления.
Корпус зубной щетки может иметь неровную форму для управления (или регулирования) захвата кистью. Например, если на переднем конце корпуса зубной щетки (положение, при котором кончики пальцев или суставы большого и указательного пальца входят в соприкосновение, когда пользователь захватывает корпус зубной щетки), имеется выступ или углубление, пользователь сознательно или подсознательно держит зубную щетку так, чтобы пальцы попадали на выступ или в углубление. При использовании этого можно добиться, что пользователь будет захватывать щетку в заранее заданном положении. Как правило, в случае, когда ориентация щетки (отрицательное направление оси Z) составляет 0° относительно угла вокруг оси Y на фиг.3, два выступа (или углубления) могут обеспечиваться в положениях приблизительно ±45°, и два углубления (или выступа) могут обеспечиваться в положениях приблизительно ±135°. Когда зубная щетка захватывается так, что пальцы соприкасаются с неровностью, легко удерживается угол наклона щетки, равный 45°.
В вышеупомянутых вариантах осуществления ЦПУ 120 электрической зубной щетки выполняет процессы вычисления очищаемого участка, измерения продолжительности чистки, вычисления угла наклона щетки, определения давления щетки, вывода вычисления чистки и т.п. Однако часть или все эти процессы могут быть выполнены внешним устройством, отличным от корпуса электрической зубной щетки. Например, выходные сигналы различных датчиков, имеющихся в корпусе электрической зубной щетки, таких как датчик ускорения и гироскоп, последовательно отправляются на внешнее устройство, и процессы, такие как вычисление очищаемого участка, выполняются ЦПУ внешнего устройства. Процессы могут быть выполнены с большой скоростью, используя ресурс внешнего устройства, имеющего большую мощность ЦПУ для сложных вычислительных процессов и процесса, включающего большой объем вычислений. При этом в корпусе электрической зубной щетки может быть установлен низко-функциональный ЦПУ. Таким образом, может быть снижена стоимость самой электрической зубной щетки и электрическая зубная щетка может быть уменьшена в размере. В дополнение к устройству отображения и зарядному устройству электрической зубной щетки в качестве внешнего устройства может быть использовано любое устройство, в котором имеется ЦПУ, такое как персональный компьютер и устройство для видеоигр.
В вышеупомянутых вариантах осуществления для определения очищаемого участка (различения щечной и язычной сторон) используются температурный датчик, камера и оптические датчики. Однако, дополнительно может использоваться датчик расстояния, такой как ультразвуковой датчик. Например, как и температурный датчик на фиг.26, датчик расстояния устанавливается на обратной поверхности щетки. В случае, когда чистится участок на щечной стороне, датчик расстояния располагается близко к щеке или входит в контакт с ней. Таким образом, измеренное значение датчика расстояния является очень малой величиной. При этом, в случае, когда чистится участок на язычной стороне, датчик расстояния направлен в полость рта. Таким образом, измеренное значение датчика расстояния является относительно большим. Поэтому, сравнивая величину измерения датчика расстояния с пороговым значением (таким, как 5 мм), можно различить щечную и язычную стороны.
Реферат
Группа изобретений относится к области медицинской техники, в частности гигиены, и может быть использована для чистки зубов. Электрическая зубная щетка содержит щетку; приводное средство для приведения щетки в движение; средство определения положения для определения положения щетки на основании выходного сигнала многокоординатного датчика ускорения; средство вычисления участка для определения очищаемого участка из множества участков, полученных путем деления поверхности зубного ряда, на основании определяемого положения; средство измерения продолжительности чистки для измерения продолжительности чистки каждого участка; средство вывода вычисления для вычисления и выведения результата чистки для каждого участка на основе измеренной продолжительности чистки и средство вычисления угла наклона щетки для определения угла наклона щетки, являющегося углом наклона щетки относительно оси зуба, на основании определяемого положения. Средство вывода вычисления дополнительно оценивает и выводит результат чистки для каждого участка на основании сравнения полученного в результате вычисления угла наклона щетки с заданной оптимальной величиной такого угла. Группа изобретений включает второй вариант выполнения электрической зубной щетки. Технический результат - обеспечение надлежащего использования электрической зубной щетки и правильной чистки зубов. 2 н. и 16 з.п. ф-лы, 35 ил.
Формула
щетку;
приводное средство для приведения щетки в движение;
средство определения положения для определения положения щетки на основании выходного сигнала многокоординатного датчика ускорения;
средство вычисления участка для определения очищаемого участка из множества участков, полученных путем деления поверхности зубного ряда, на основании определяемого положения;
средство измерения продолжительности чистки для измерения продолжительности чистки каждого участка;
средство вывода вычисления для вычисления и выведения результата чистки для каждого участка на основе измеренной продолжительности чистки, и
средство вычисления угла наклона щетки для определения угла наклона щетки, являющегося углом наклона щетки относительно оси зуба, на основании определяемого положения,
при этом средство вывода вычисления дополнительно оценивает и выводит результат чистки для каждого участка на основании сравнения, полученного в результате вычисления угла наклона щетки, с заданной оптимальной величиной такого угла.
щетку;
приводное средство для приведения щетки в движение;
средство определения положения для определения положения щетки на основании выходного сигнала многокоординатного датчика ускорения;
средство вычисления участка для определения очищаемого участка из множества участков, полученных путем деления поверхности зубного ряда, на основании определенного положения;
средство вычисления угла наклона щетки для вычисления угла наклона щетки, являющегося углом наклона щетки относительно оси зуба, на основании определяемого положения и
средство указания угла наклона щетки для сравнения вычисленного угла наклона щетки с оптимальной величиной угла наклона щетки на очищаемом участке и вывода указания для сообщения пользователю, является ли угол наклона щетки правильным.
Комментарии