Способы и системы для извлечения характеристик чистящего движения пользователя, использующего устройство для гигиены полости рта, включающее в себя по меньшей мере один акселерометр для обеспечения обратной связи пользователю - RU2721944C2
Код документа: RU2721944C2
Чертежи

















Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[1] Настоящее раскрытие в целом относится к устройствам для гигиены полости рта и, в частности, к устройствам для гигиены полости рта, включающим в себя по меньшей мере один акселерометр, выполненный с возможностью определения качества чистящего движения устройства для гигиены полости рта и предоставления обратной связи пользователю на основании извлеченных характеристик. Настоящее раскрытие также в целом относится к системам и способам, использующим устройство для гигиены полости рта, включающее в себя по меньшей мере один акселерометр для определения качества чистящего движения устройства для гигиены полости рта.
2. Описание уровня техники
[2] Хотя надлежащая гигиена полости рта важна, корректировка техники гигиены полости рта человека часто является затруднительной. Одним решением этой проблемы для человека является демонстрация его техники гигиены полости рта в присутствии профессионала по гигиене полости рта, например, стоматолога, и предоставление профессионалу по гигиене полости рта возможности исправления ошибок человека. Однако это имеет недостатки, поскольку человек может не помнить все скорректированные аспекты, а также то, что пользователь может не демонстрировать свою настоящую технику гигиены полости рта в присутствии профессионала-гигиениста. Кроме того, с течением времени техника гигиены полости рта человека может регрессировать к предшествующему неправильному способу и/или новому неправильному способу, или человек может освоить новые, неправильные техники.
[3] Одно предлагаемое решение такой проблемы состоит в создании ʺигрыʺ, в которой выполнение правильной техники гигиены полости рта поощряется индивидуальной победой в игре, а неправильные техники гигиены полости рта приводят к проигрышу в игре. Хотя эта концепция может срабатывает у детей, она часто непригодна и неэффективна для взрослых. Кроме того, игра может только помогать человеку корректировать свою технику гигиены полости рта при игре, и человек может не иметь возможности смотреть, как улучшается в целом его техника гигиены полости рта, или когда он отклоняется слишком далеко от правильной техники. Кроме того, дополнительно такие игры по гигиене полости рта обычно не являются переносными и, таким образом, они не могут обеспечивать человеку в реальном времени обратную связь, касающуюся эффективности его гигиенического ухода за полостью рта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[4] Соответственно, целью настоящего раскрытия является обеспечение устройства для гигиены полости рта, например, электронной зубной щетки, которая обладает способностью извлечения характеристики движения пользователя, оперирующего устройством для гигиены полости рта, и предоставления обратной связи пользователю в отношении эффективности его техники. Эта цель достигается согласно настоящему раскрытию, посредством анализа характеристик движения устройства для гигиены полости рта и, на основании данных, полученных по меньшей мере от одного датчика, включенного в устройство для гигиены полости рта, или по меньшей мере одного компонента захваченного изображения, обеспечения обратной связи пользователю, информируя его об эффективности оперирования им устройством для гигиены полости рта. Кроме того, другой аспект настоящего изобретения состоит в обеспечении пользовательского устройства, выполненного с возможностью обнаружения характеристик движения пользователя, оперирующего устройством для гигиены полости рта. Пользовательское устройство дополнительно выполнено с возможностью извлечения характеристик движения пользователя, оперирующего устройством для гигиены полости рта, и предоставления обратной связи пользователю.
[5] В первом примерном варианте осуществления обеспечивается способ предоставления обратной связи пользователю, оперирующему устройством для гигиены полости рта, включающим в себя по меньшей мере один датчик. В одном варианте осуществления принимаются данные, полученные указанным по меньшей мере одним датчиком устройства для гигиены полости рта. Затем полученные данные анализируются для определения качества движения устройства для гигиены полости рта, оперируемого пользователем. Затем пользователю предоставляется обратная связь на основании определенного качества движения.
[6] Во втором примерном варианте осуществления обеспечивается устройство для гигиены полости рта. В одном варианте осуществления устройство для гигиены полости рта включает в себя ручку, включающую в себя систему привода от двигателя, прикрепляемый блок, блок приводного механизма, соединенный с указанным прикрепляемым блоком, магнит, выполненный с возможностью создания магнитного поля, по меньшей мере один датчик, установленный в магнитном поле, созданном магнитом, и по меньшей мере один процессор. Указанный по меньшей мере один процессор выполнен с возможностью получения данных от указанного по меньшей мере одного датчика. Указанные данные соответствует деформациям магнитного поля относительно указанного по меньшей мере одного датчика, при этом указанные деформации происходят в ответ на воздействие внешней силы на прикрепляемый блока при взаимодействии с целевой областью пользователя, оперирующего устройством для гигиены полости рта.
[7] В третьем примерном варианте осуществления обеспечивается способ увеличения пользовательской эффективности при оперировании устройством для гигиены полости рта. В одном варианте осуществления по меньшей мере одно изображение захватывается из компонента захватывания изображения. Затем определяется целевая область для оперирования устройством для гигиены полости рта на основании указанного по меньшей мере одного захваченного изображения. На основании определенной целевой области извлекаются характеристики, соответствующие движению устройства для гигиены полости рта, оперируемого пользователем. Извлеченные характеристики, соответствующие движению устройства для гигиены полости рта, оперируемому пользователем, затем анализируются для определения качества движения устройства для гигиены полости рта. Затем пользователю предоставляется обратная связь, касающаяся определенного качества движения устройства для гигиены полости рта.
[8] В четвертом примерном варианте осуществления обеспечивается пользовательское устройство для помощи пользователю в улучшении эффективности оперирования устройством для гигиены полости рта. Пользовательское устройство включает в себя по меньшей мере один компонент захватывания изображения, дисплейный экран, коммуникационную схему, память и по меньшей мере один процессор. Указанный по меньшей мере один процессор выполнен с возможностью захватывания по меньшей мере двух изображений пользователя, оперирующего устройством для гигиены полости рта с использованием указанного по меньшей мере одного компонента захватывания изображения. В ответ на обнаружение, что пользователь оперирует устройством для гигиены полости рта в целевой области, информация о движении устройства для гигиены полости рта извлекается из указанных по меньшей мере двух захваченных изображений. Извлеченная информация о движении устройства для гигиены полости рта, оперируемого пользователем, затем анализируется посредством сравнения извлеченной информации о движении с заданным целевым движением для устройства для гигиены полости рта, хранящимся в памяти на пользовательском устройстве. Сравнение определяет качество извлеченного движения устройства для гигиены полости рта. Затем предоставляется обратная связь пользователю, оперирующему устройством для гигиены полости рта, при этом предоставленная обратная связь включает в себя качество извлеченной информации о движении.
[9] В пятом примерном варианте осуществления обеспечивается способ определения, правильно ли пользователь использует устройство для гигиены полости рта. В некоторых вариантах осуществления информация о движении устройства для гигиены полости рта принимается по меньшей мере от одного акселерометра, расположенного в устройстве для гигиены полости рта. Принятая информация о движении затем сравнивается с целевым движением устройства для гигиены полости рта. Если определено, что принятая информация о движении находится в заданном диапазоне пороговых значений целевого движения устройства для гигиены полости рта, обратная связь предоставляется пользователю, оперирующему устройством для гигиены полости рта. Например, предоставленная обратная связь может соответствовать тактильной обратной связи и/или визуальной обратной связи.
[10] В шестом примерном варианте осуществления обеспечивается устройство для гигиены полости рта, выполненное с возможностью определения качества чистки пользователем. Устройство для гигиены полости рта включает в себя ручку, включающую в себя систему привода от двигателя, прикрепляемый блок, память, расположенную в ручке, по меньшей мере один акселерометр, расположенный в ручке, и по меньшей мере один процессор. Указанный по меньшей мере один процессор выполнен с возможностью получения информации от указанного по меньшей мере одного акселерометра, соответствующей чистящему движению устройства для гигиены полости рта. Полученная информация, соответствующая чистящему движению устройства для гигиены полости рта, затем сравнивается с целевым чистящим движением для устройства для гигиены полости рта, которое хранится в памяти. Затем вычисляется разность между чистящим движением устройства для гигиены полости рта и целевым чистящим движением для устройства для гигиены полости рта, и формируется оценка для чистящего движения устройства для гигиены полости рта на основании вычисленной разности.
[11] В седьмом примерном варианте осуществления обеспечивается пользовательское устройство для предоставления пользователю, оперирующему устройством для гигиены полости рта, информации, касающейся качества чистящего движения пользователя. Пользовательское устройство включает в себя дисплейный экран, коммуникационную схему, память и по меньшей мере один процессор. Указанный по меньшей мере один процессор выполнен с возможностью приема информации, полученной по меньшей мере одним акселерометром, расположенным на устройстве для гигиены полости рта. В некоторых вариантах осуществления указанная принятая информация соответствует по меньшей мере одному из частоты, амплитуды и энергии чистящего движения устройства для гигиены полости рта. Затем определяется, является ли по меньшей мере одно из частоты, амплитуды и энергии чистящего движения устройства для гигиены полости рта большим или равным заданному пороговому значению для целевого чистящего движения устройства для гигиены полости рта. Если по меньшей мере одно из частоты, амплитуды и энергии чистящего движения больше или равно указанному заданному пороговому значению для целевого чистящего движения устройства для гигиены полости рта, одно или более из по меньшей мере одного из частоты, амплитуды и энергии чистящего движения устройства для гигиены полости рта, и разность между по меньшей мере одним из частоты, амплитуды и энергии чистящего движения устройства для гигиены полости рта и указанным заданным пороговым значением для целевого чистящего движения устройства для гигиены полости рта отображается на дисплейном экране.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[12] Вышеприведенные и другие признаки настоящего изобретения, его характер и различные преимущества станут более очевидны при рассмотрении нижеприведенного подробного описания, взятого совместно с сопроводительными чертежами, на которых:
[13] Фиг.1A - иллюстративная схема устройства 10 для гигиены полости рта, включающего в себя по меньшей мере один датчик согласно различным вариантам осуществления;
[14] Фиг.1B - иллюстративная схема устройства 10 для гигиены полости рта согласно различным вариантам осуществления;
[15] Фиг.1C - иллюстративная схема устройства 10 для гигиены полости рта и пользовательского устройства 150 согласно различным вариантам осуществления;
[16] Фиг.2 - иллюстративная схема пользовательского интерфейса 200 согласно различным вариантам осуществления;
[17] Фиг.3A и 3B - иллюстративные схемы, соответственно, пользовательских интерфейсов 300 и 300' согласно различным вариантам осуществления;
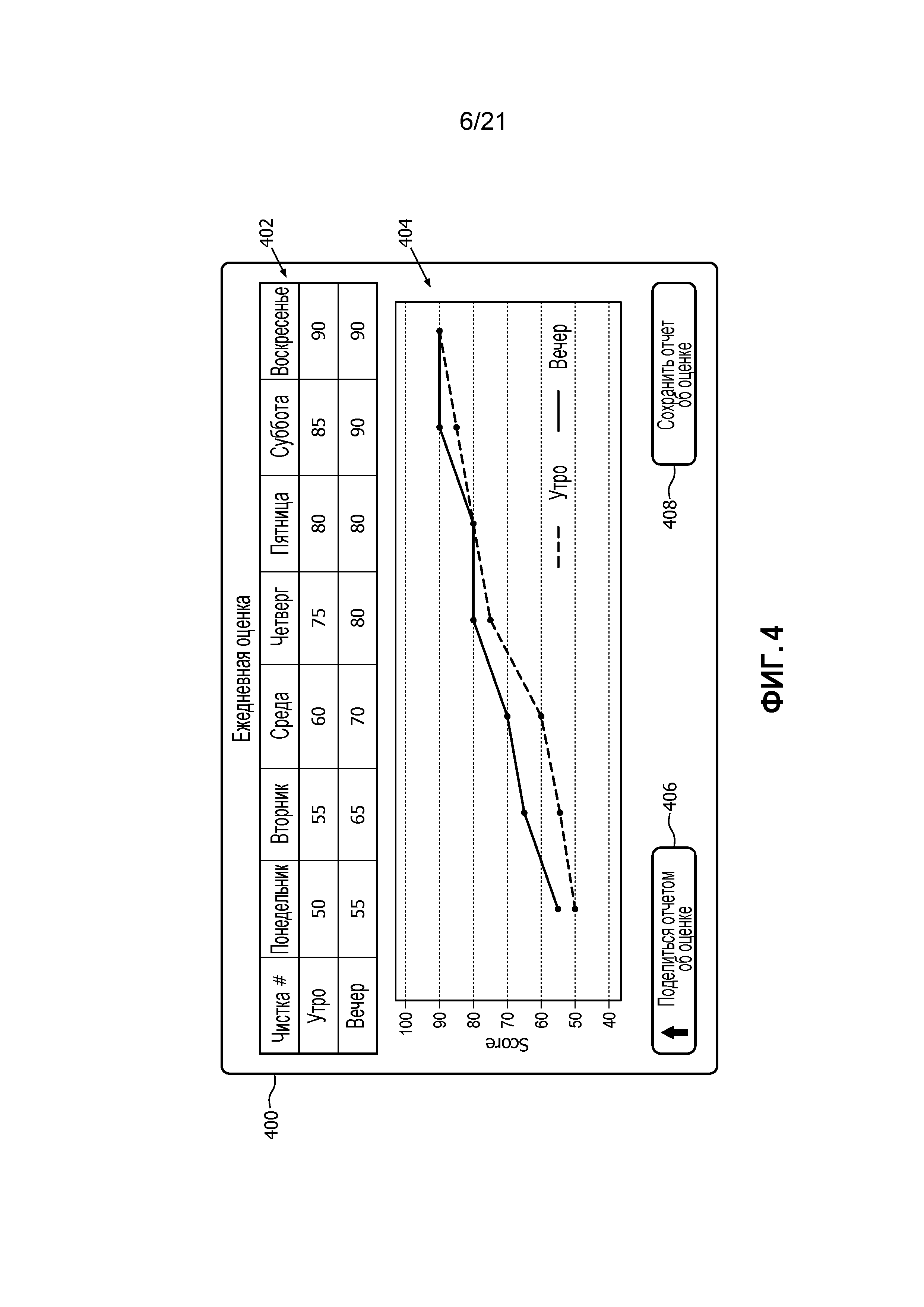
[18] Фиг.4 - иллюстративная схема пользовательского интерфейса 400 согласно различным вариантам осуществления;
[19] Фиг.5 - иллюстративная блок-схема процесса 500 согласно различным вариантам осуществления;
[20] Фиг.6 - иллюстративная схема системы 2, включающей в себя пользовательское устройство 150 и устройство 10 для гигиены полости рта согласно различным вариантам осуществления;
[21] Фиг.7 - иллюстративная блок-схема пользовательского устройства 150 согласно различным вариантам осуществления;
[22] Фиг.8 - иллюстративная схема изображения 800 пользователя согласно различным вариантам осуществления;
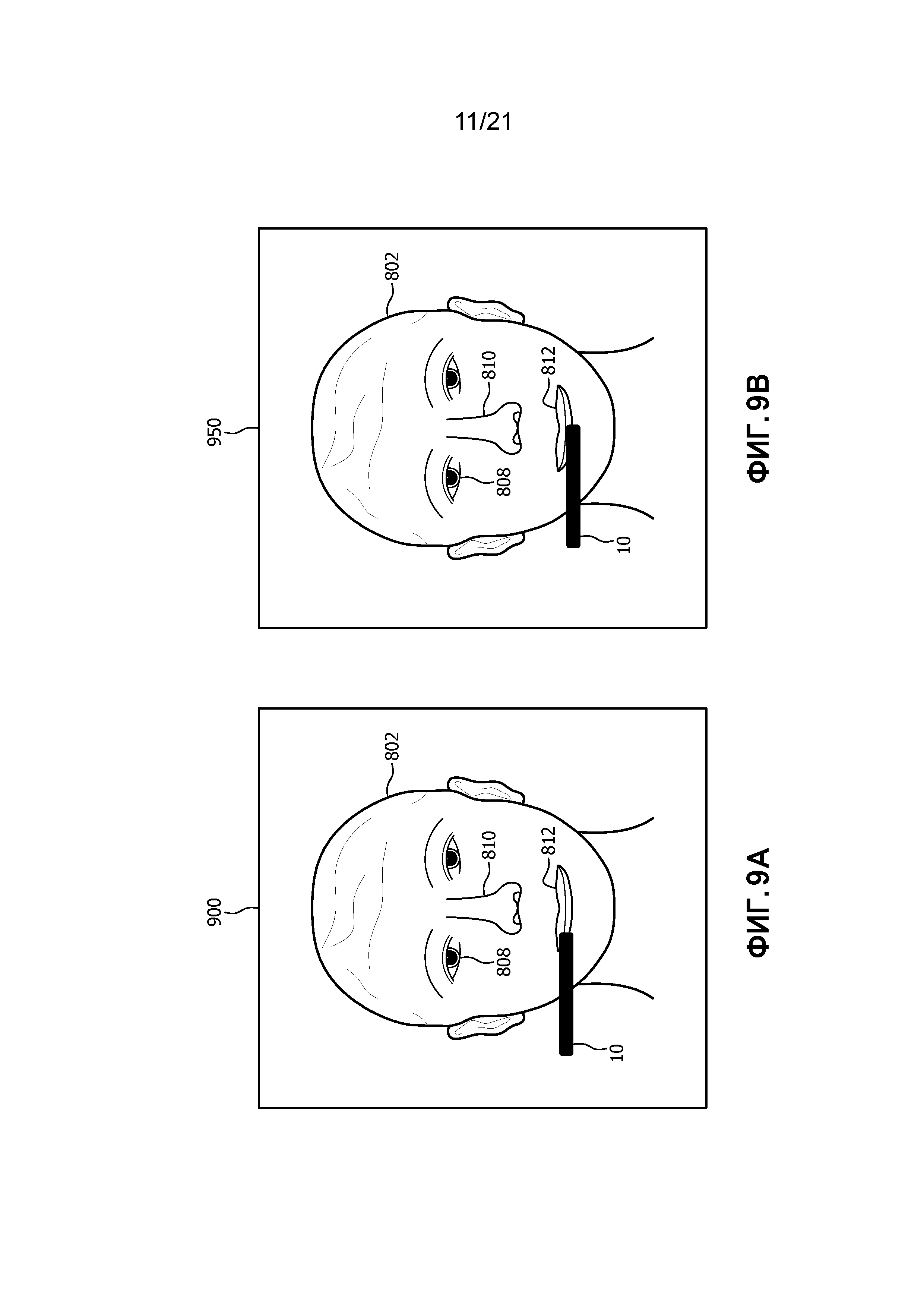
[23] Фиг.9A и 9B - иллюстративные схемы, описывающие изменения положения устройства 10 согласно различным вариантам осуществления;
[24] Фиг.10 - иллюстративная схема, описывающая изменения положения устройства 10 на основании изменения пиксельного положения и рамки согласно различным вариантам осуществления;
[25] Фиг.11 - иллюстративная схема, описывающая изменения положения устройства 10 на основании изменения вектора положения между устройством 10 и реперным объектом согласно различным вариантам осуществления;
[26] Фиг.12 - иллюстративная схема, описывающая изменения положения устройства 10 на основании изменения центра тяжести захваченного изображения согласно различным вариантам осуществления;
[27] Фиг.13 - иллюстративная схема различных пользовательских интерфейсов согласно различным вариантам осуществления;
[28] Фиг.14 - иллюстративная блок-схема процесса 1100 согласно различным вариантам осуществления;
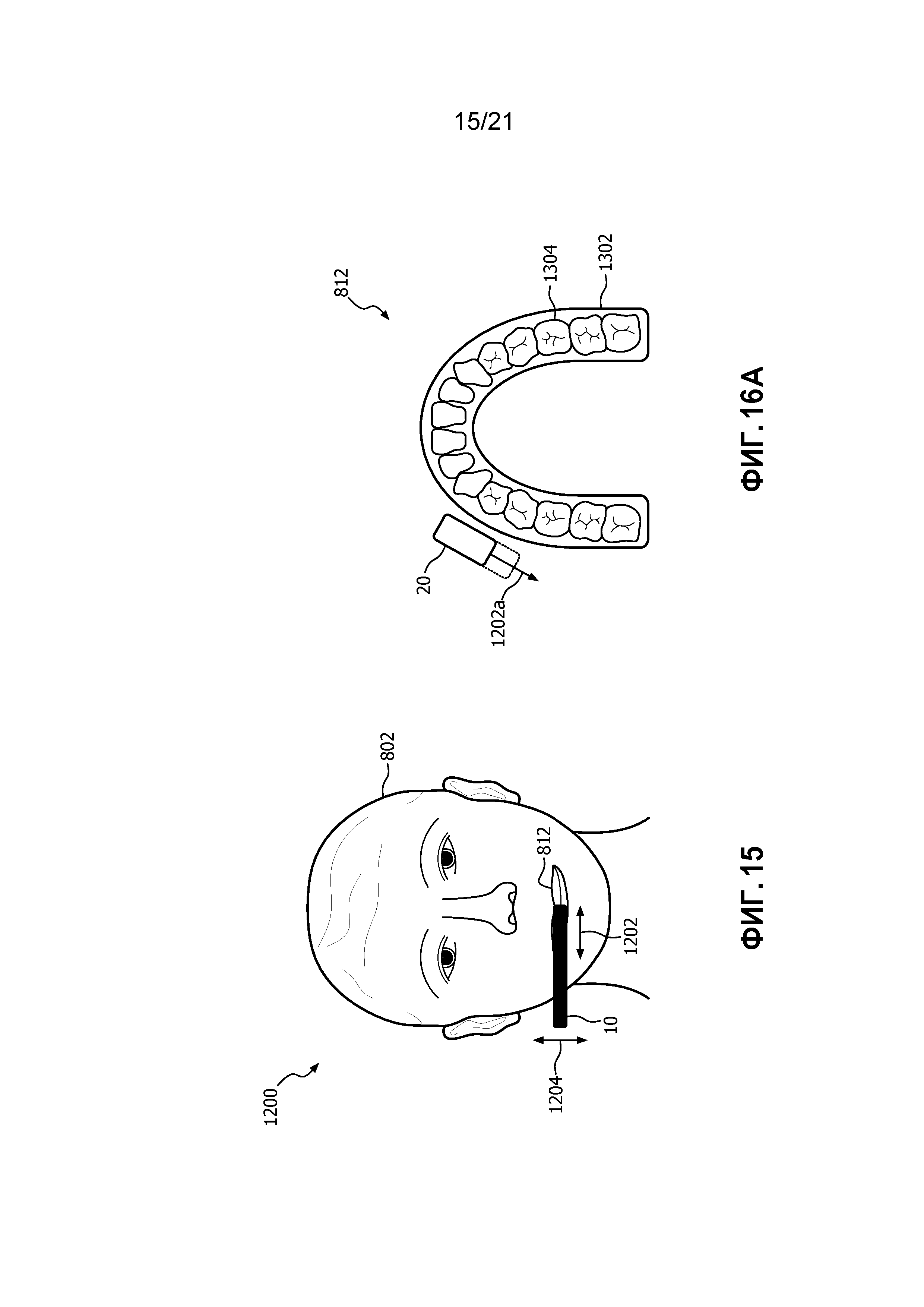
[29] Фиг.15 - иллюстративная схема пользовательского устройства 10, используемого согласно различным вариантам осуществления;
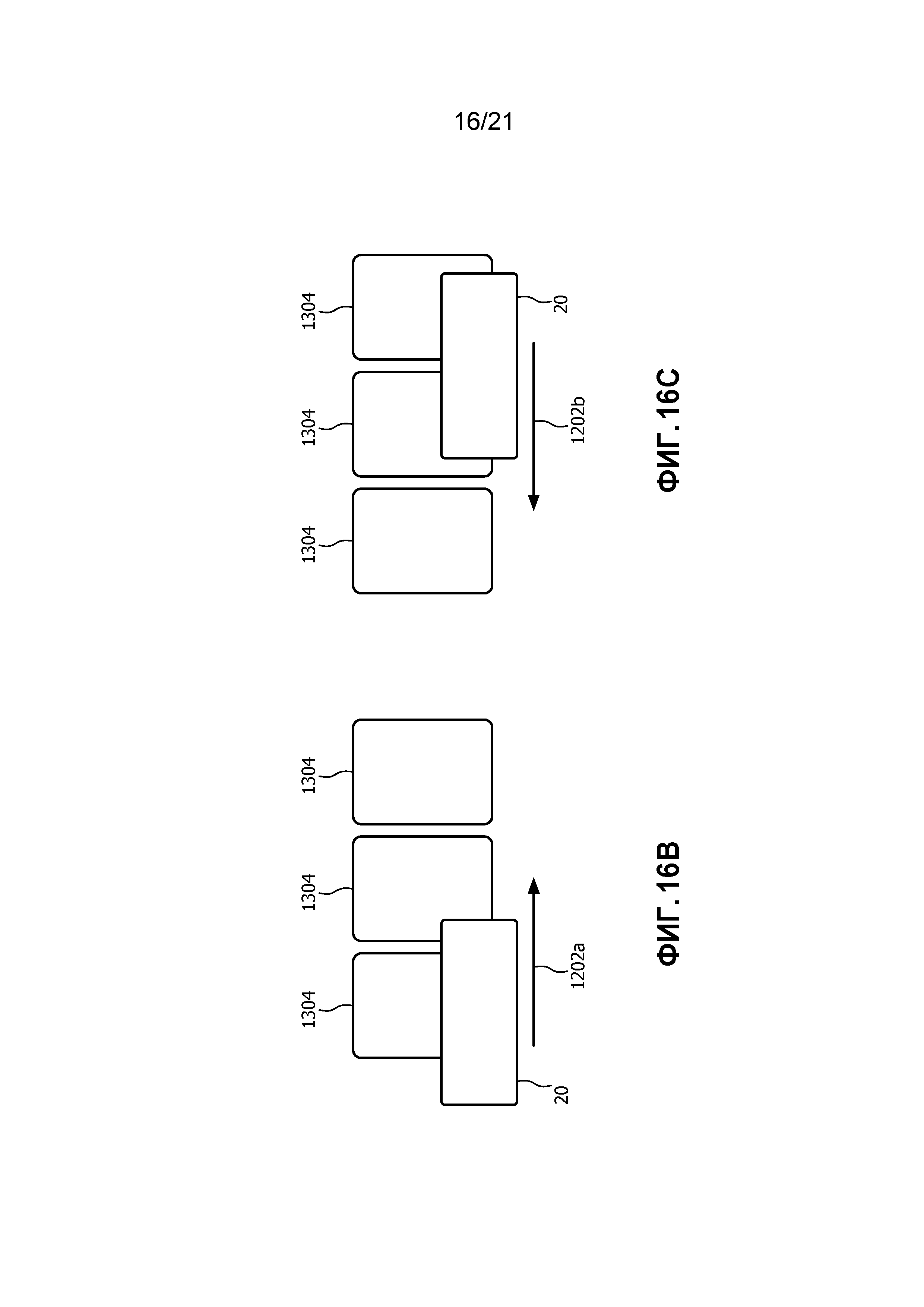
[30] Фиг.16A-E - иллюстративные схемы прикрепляемого блока 20 устройства для гигиены полости рта, используемого для чистки одного или более зубов 1304 согласно различным вариантам осуществления;
[31] Фиг.17 - иллюстративная блок-схема процесса 1700 согласно различным вариантам осуществления;
[32] Фиг.18 - иллюстративная блок-схема процесса 1800 согласно различным вариантам осуществления;
[33] Фиг.19 - иллюстративная блок-схема процесса 1900 согласно различным вариантам осуществления; и
[34] Фиг.20 - иллюстративная блок-схема процесса 2000 согласно различным вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[35] Настоящее изобретение может принимать вид множества компонентов и компоновок компонентов, и множества техник, способов или процедур и компоновок этапов. Ссылочные чертежи приведены только в качестве иллюстративных вариантов осуществления, и не должны рассматриваться как ограничивающие настоящее изобретение. Ниже описано множество изобретательских признаков, каждый из которых используется независимо от другого или в сочетании с другими признаками. Кроме того, при использовании в настоящем документе слово в единственном числе включает в себя множественное число, если контекст не указывает явным образом на иное.
[36] Фиг.1A - иллюстративная схема устройства 10 для гигиены полости рта, включающего в себя по меньшей мере один датчик, согласно различным вариантам осуществления. Устройство 10 для гигиены полости рта включает в себя корпус 18, содержащий блок 12 приводного механизма, резонансно приводимый в действие системой 14 питания, включающей в себя аккумулятор и носитель электроники (например, печатную плату, или PCB). Устройство 10 для гигиены полости рта дополнительно включает в себя печатную плату, имеющую микропроцессорный блок 15 управления для создания приводного сигнала для системы 14 питания. Прикрепляемый блок 20, на дистальном конце которого находится чистящий элемент 21, съемно фиксирован к приводному стержню 23 блока 12 приводного механизма. На заднем конце блока 12 приводного механизма находится магнит 30, и в устройство 10 для гигиены полости рта также установлен по меньшей мере один датчик 32. В одном примерном варианте осуществления по меньшей мере один датчик 32 представляет собой датчик Холла. Более подробное описание устройства для гигиены полости рта, включающего в себя по меньшей мере один датчик Холла, может быть найдено в публикации международной патентной заявки WO 2014/037856 того же заявителя, полностью включенной в настоящий документ посредством ссылки.
[37] В одном варианте осуществления датчик(и) 32 представляет собой датчик Холла, способный измерять напряженность магнитного поля в корпусе 18. Магнитное поле может генерироваться магнитом 30. Применение датчика Холла в примерном варианте осуществления измеряет напряженность магнитного поля относительно датчика Холла. При внешней нагрузке, или силе, приложенной к прикрепляемому блоку 20, возникает деформация магнитного поля в корпусе 18. Эта деформация измеряется посредством датчика(ов) 32, и может предоставлять информацию, касающуюся величины силы, приложенной к прикрепляемому блоку 20.
[38] В одном варианте осуществления по меньшей мере один датчик 32 представляет собой датчик силы. Датчик силы может быть установлен вместо датчика Холла и/или совместно с датчиком Холла. Датчик силы позволяет извлекать из устройства 10 для гигиены полости рта информацию, соответствующую величине силы, приложенной к прикрепляемому блоку 20. В одном варианте осуществления, однако, величина силы, приложенной к прикрепляемому блоку 20, может также извлекаться из датчика Холла. Например, в одном варианте осуществления сила, приложенная к прикрепляемому блоку 20, может быть получена посредством использования закона силы Лоренца.
[39] В одном варианте осуществления датчик(и) 32 может также включать в себя один или более акселерометров, способных определять, насколько быстро (например, скорость и/или ускорение) двигается устройство 10 для гигиены полости рта. В одном варианте осуществления акселерометры выполнены с возможностью измерения изменений в движении устройства 10 для гигиены полости рта посредством определения изменения в ориентации устройства 10 для гигиены полости рта относительно силы тяжести (см. ниже).
[40] В одном варианте осуществления выполняется дополнительный этап предварительной обработки для исключения любых эффектов силы тяжести из сигнала акселерометра. Например, сигнал акселерометра может иметь дополнительный шум из-за эффектов гравитации, обнаруженных акселерометром. За счет использования предварительной обработки, например, низкочастотного или высокочастотного фильтра, шум может быть исключен, так что может происходить точный анализ движения акселерометра.
[41] Фиг.1B - иллюстративная схема устройства 10 для гигиены полости рта согласно различным вариантам осуществления. В проиллюстрированном примерном варианте осуществления устройство 10 для гигиены полости рта также включает в себя дополнительные компоненты, расположенные в корпусе 18.
[42] Устройство 10 для гигиены полости рта, в проиллюстрированном неограничивающем варианте осуществления, включает в себя процессор или процессоры 102, память 106, коммуникационную схему 108 и входной/выходной интерфейс 110. Эти компоненты могут располагаться на микропроцессорном блоке 15 управления, или могут располагаться в другом месте в корпусе 18. Процессор 102 может включать в себя любую схему обработки, например, один или более процессоров, способных управлять работой и функциональными возможностями устройства 10 для гигиены полости рта. В одном варианте осуществления процессор 102 облегчает связь между различными компонентами в устройстве 10 (например, датчиком(ами) 32 и коммуникационной схемой 108).
[43] Память 106, в одном варианте осуществления, включает в себя один или более носителей информации. Различные типы носителей информации включают в себя, без ограничения, жесткие диски, твердотельные накопители, флэш-память, постоянную память (например, ROM) или любой другой тип хранения, или любое сочетание перечисленного. В памяти 106 может храниться любой вид данных или контента, например, фотографии, музыкальные файлы, видео, контактная информация, приложения, документы или любые другие файлы или любое сочетание перечисленного. Также, в одном варианте осуществления память 106 включает в себя кэш-память, полупостоянную память (например, RAM) или любой другой тип памяти, или любое сочетание перечисленного. В одном варианте осуществления память 106 может использоваться вместо и/или в дополнение к внешней памяти для хранения данных на устройстве 10 для гигиены полости рта.
[44] В одном варианте осуществления коммуникационная схема 108 включает в себя любую схему, обладающую способностью соединения с коммуникационной сетью и/или передачи информации (голоса и/или данных) одному или более дополнительным пользовательским устройствам и/или серверам. Коммуникационная схема 108 обладает способностью взаимодействия с коммуникационной сетью, используя любой подходящий протокол связи, включающий в себя, без ограничения, Wi-Fi (например, протокол 802.11), Bluetooth®, радиочастотные системы (например, системы связи на 900 МГц, 1,4 ГГц и 5,6 ГГц), инфракрасный протокол, GSM, GSM плюс EDGE, CDMA, четырехдиапазонный, VOIP или любой другой протокол, или любое сочетание перечисленного.
[45] В одном варианте осуществления входной/выходной интерфейс 110 включает в себя любой подходящий механизм или компонент для приема входных данных от пользователя, оперирующего устройством 10 для гигиены полости рта и/или генерирования выходных данных от пользователя, оперирующего устройством 10 для гигиены полости рта. Входной/выходной интерфейс 110 может включать в себя, без ограничения, внешнюю клавиатуру, мышь, джойстик или любой другой подходящий входной механизм, или любое сочетание перечисленного. В одном варианте осуществления входной/выходной интерфейс 110 включает в себя дисплей, способный отображать пользовательский интерфейс.
[46] Устройство 10 для гигиены полости рта выполнено с возможностью получать данные от датчика 32 или любого другого датчика, постоянно находящегося в нем, и анализировать данные для определения качества чистящего движения пользователя, оперирующего устройством 10 для гигиены полости рта. Например, датчик(и) 32 может представлять собой датчик Холла или датчик силы, или и то и другое. В одном частном примере датчик Холла может использоваться для извлечения информации о силе. В другом примере датчик(и) 32 может включать в себя один или более акселерометров. В одном варианте осуществления анализируемые данные используются для предоставления обратной связи пользователю посредством входного/выходного интерфейса 110. Например, входной/выходной интерфейс 110 может включать в себя дисплейный экран, выполненный с возможностью отображать пользовательский интерфейс, включающий в себя анализ качества чистки пользователем. В другом примере входной/выходной интерфейс 110 может предоставлять аудио, визуальную или тактильную обратную связь пользователю на основании проанализированных данных, полученных указанным по меньшей мере одним датчиком 32. Специалисты в данной области техники признают, что, хотя для получения данных используется по меньшей мере один датчик 32, может использоваться один или более дополнительных датчиков.
[47] Фиг.1C - иллюстративная схема устройства 10 для гигиены полости рта и пользовательское устройство 150 согласно различным вариантам осуществления. В проиллюстрированном примерном варианте осуществления пользовательское устройство 150 включает в себя один или более процессоров 102, хранилище 104 данных, память 106, коммуникационную схему 108 и входной/выходной интерфейс 110. В проиллюстрированном примерном варианте осуществления устройство 10 для гигиены полости рта по существу аналогично устройству 10 для гигиены полости рта, представленному на фиг.1A, за исключением того, что оно также включает в себя коммуникационную схему 108, по существу аналогичную коммуникационной схеме 108 пользовательского устройства 150.
[48] В одном варианте осуществления коммуникационная схема 108 выполнена с возможностью передачи данных, полученных датчиком(ами) 32 от устройства 10 для гигиены полости рта пользовательскому устройству 150 посредством коммуникационной схемы 108. Например, данные от датчика(ов) 32 (например, датчика Холла) устройства 10 для гигиены полости рта могут передаваться пользовательскому устройству 150 посредством Wi Fi соединения, Bluetooth-соединения и/или проводного соединения.
[49] Данные, полученные датчиком(ами) 32 устройства 10 для гигиены полости рта, соответствуют обнаруженным деформациям магнитного поля, образованного в корпусе 18 устройства 10 для гигиены полости рта, на основании оперирования пользователем устройством 10 для гигиены полости рта. Например, когда к прикрепляемому блоку 21 приложена внешняя сила или нагрузка, может возникать деформация магнитного поля в корпусе 18, которая может быть измерена датчиком(ами) 32. Данные могут посылаться от устройства 10 для гигиены полости рта на пользовательское устройство 150 для обработки, анализа и/или предоставления обратной связи пользователю, оперирующему устройством 10 для гигиены полости рта. Например, данные, полученные датчиком(ами) 32, например, датчиком Холла, могут анализироваться на пользовательском устройстве 150 с использованием одного или более алгоритмов, хранящихся в памяти 106, которые определяют качество чистки пользователя. Затем пользователю может предоставляться обратная связь, касающаяся определенного качества его чистящего движения. В одном варианте осуществления обратная связь отображается на дисплейном экране, представляющем пользовательский интерфейс.
[50] Специалисты в данной области техники признают, что устройство 10 для гигиены полости рта может относиться к любому изделию, способному оказывать помощь в гигиене полости рта человека, включающему в себя, без ограничения, электрические зубные щетки, неэлектрические зубные щетки, устройства для очистки межзубных промежутков, ирригаторы, очистители языка или любое другое устройство для гигиены полости рта, или любое сочетание перечисленного. Кроме того, по меньшей мере в одном варианте осуществления устройство 10 для гигиены полости рта может относиться к индивидуальному гигиеническому устройству, например, электронной бритве, триммеру для волос, индивидуальной механической щетке и т.п., и нижеприведенные иллюстрации не ограничиваются только вариантами гигиены полости рта.
[51] Фиг.2 - иллюстративная схема пользовательского интерфейса 200 согласно различным вариантам осуществления. Пользовательский интерфейс 200, в одном варианте осуществления, отображается на пользовательском устройстве, включающем в себя дисплейный экран (например, входной/выходной интерфейс 110 пользовательского устройства 150). Например, пользовательский интерфейс 200 может быть отображен на сенсорном дисплейном экране, находящемся на переносном устройстве, например, смартфоне или планшете. В другом примере пользовательский интерфейс 200 может отображаться на дисплейном экране электрической зубной щетки (например, входном/выходном интерфейсе 110 устройства 10 для гигиены полости рта, как представлено на фиг.1B).
[52] Пользовательский интерфейс 200, в проиллюстрированном варианте осуществления, включает в себя информацию, соответствующую действиям пользователя, оперирующего устройством 10 для гигиены полости рта, включающим в себя один или более датчика(ов) 32.
[53] В проиллюстрированном варианте осуществления пользовательский интерфейс 200 включает в себя графическую секцию 202 и секцию 204 комментариев. Графическая секция 202 отображает графическое представление 206 данных, полученных от датчика(ов) 32 устройства 10 для гигиены полости рта, и, в частности, амплитуду чистящего движения устройства 10 для гигиены полости рта в течение периода времени, когда устройство 10 для гигиены полости рта работало. Графическая секция 202 позволяет пользователю, оперирующему устройством 10 для гигиены полости рта, визуально видеть, как его техника чистки прилагает давление к зубам в течение времени, и позволяет пользователю скорректировать различные несоответствия, которые могут возникать в его технике. Например, если графическое представление 206 имеет амплитуду, являющуюся постоянно высокой, низкой или в целом несоответствующей, пользователь может визуально видеть информацию, представленную в графической секции 202 посредством графического представления 206. Кроме того, графическое представление 206 обеспечивает пользователю возможность визуализации частоты своих чистящих движений и определения, не является ли его техника чистки слишком быстрой или слишком медленной.
[54] Секция 204 комментариев, в иллюстративном варианте осуществления, включает в себя комментарии, созданные пользовательским устройством 150, отображаемые на пользовательском интерфейсе 200, которые соответствуют технике чистки пользователя. Например, если пользователь прикладывает надлежащую величину давления к своим зубам, на пользовательском интерфейсе 200 может отображаться сообщение, констатирующее ʺДАВЛЕНИЕ ХОРОШЕЕ!ʺ, а если пользователь не прикладывает достаточного давления, на пользовательском интерфейсе 200 может отображаться сообщение, констатирующее ʺДАВЛЕНИЕ СЛИШКОМ НИЗКОЕʺ. Другие комментарии относительно частоты чистки пользователем и/или качества чистки пользователем, по сравнению с предыдущим сеансом чистки, также могут отображаться в секции 204 комментариев.
[55] В одном варианте осуществления один или более алгоритмов, встроенных в пользовательское устройство 150 и/или устройство 10 для гигиены полости рта, получают данные от датчика(ов) 32 (например, датчика Холла) и преобразуют эти данные в числовое представление. Затем числовое представление может быть сравнено с заданным значением давления, частоты и/или качества чистки, которые могут при работе привести к появлению одного или более различных сообщений в секции 204 комментариев. Например, справочная таблица может быть включена в память 106 на пользовательском устройстве 150 и/или устройстве 10 для гигиены полости рта, которое информирует пользовательское устройство 150 и/или устройство 10 для гигиены полости рта отобразить сообщение ʺДАВЛЕНИЕ ХОРОШЕЕ!ʺ, когда полученные данные от датчика(ов) 32 указывают, что пользователем, оперирующим устройством 10 для гигиены полости рта, прикладывается надлежащая величина давления.
[56] Фиг.3A и 3B - иллюстративные схемы других пользовательских интерфейсов 300 и 300', соответственно, согласно различным вариантам осуществления. В иллюстративных вариантах осуществления пользовательский интерфейс 300 отображает графику, которая информирует пользователя, когда его чистящее движение ниже целевого чистящего движения, а пользовательский интерфейс 300' отображает графику, которая информирует пользователя, когда его чистящее движение больше целевого чистящего движения. Пользовательские интерфейсы 300 и 300' выполнены с возможностью отображения на дисплейном экране пользовательского устройства, которое принимает данные, полученные датчиком(ами) 32 устройства 10 для гигиены полости рта, и/или дисплейном экране, расположенном на устройстве 10 для гигиены полости рта и/или пользовательском устройстве 150.
[57] В одном варианте осуществления целевое чистящее движение хранится в памяти 106 на пользовательском устройстве 150 и/или устройстве 10 для гигиены полости рта, которое отображает пользовательский интерфейс 300. Целевое чистящее движение может быть задано перед возникновением какого бы то ни было чистящего действия. Например, целевое чистящее движение может быть задано пользователем, родителями пользователя и/или стоматологом пользователя. Когда пользователь чистит зубы, датчик(и) 32 устройства 10 для гигиены полости рта получают данные, относящиеся к внешней силе, приложенной к устройству 10 для гигиены полости рта. Например, если датчик(и) 32 представляет собой датчик Холла, приложенная внешняя сила вызовет внутреннюю деформацию магнитного поля в корпусе 18 устройства 10 для гигиены полости рта, и внутренняя деформация измеряется относительно датчика(ов) 32 (например, датчика Холла) устройства 10 для гигиены полости рта. В одном варианте осуществления датчик Холла настроен так, чтобы частота восприятия данных по меньшей мере ы два раза превышала ожидаемую максимальную частоту движения, однако специалисты в данной области техники признают, что может использоваться любая подходящая частота восприятия, и вышеприведенное является просто примером.
[58] Пользовательский интерфейс 300 включает в себя окно 310 целевого чистящего движения, которое указывает границы целевого чистящего движения для пользователя, оперирующего устройством 10 для гигиены полости рта. В одном варианте осуществления имеющееся в настоящее время чистящее движение пользователя указано маркером 304. Когда чистящее движение изменяется по времени, это отображается траекторией 302, которая указывает различные положения маркера 304 при чистке. В одном варианте осуществления 300 маркер 304 и траектория 302 указывают, что чистящее движение пользователя ниже целевого чистящего движения, определенного окном 310 целевого чистящего движения. Пользователь может обладать способностью визуально видеть пользовательский интерфейс 300, имеющийся на дисплейном экране (например, входной/выходной интерфейс 110) и надлежащим образом корректировать свою технику чистки. Например, маркер 304 и траектория 302 пользовательского интерфейса 300 может указывать, что чистящее движение пользователя ниже целевого чистящего движения, и, таким образом, пользователь может увеличить свое чистящее движение (например, частоту и/или амплитуду).
[59] В пользовательском интерфейсе 300' чистящее движение пользователя больше целевого чистящего движения. Как видно на фиг.3B, траектория 302 показывает, что пользователь в точке 356 превысил заданное чистящее движение, определенное окном 310 целевого чистящего движения. В этом частном случае пользователь может видеть пользовательский интерфейс 300' и корректировать свою чистку посредством уменьшения частоты и/или амплитуды чистки для возврата к целевому чистящему движению.
[60] Фиг.4 - иллюстративная схема другого пользовательского интерфейса 400 согласно различным вариантам осуществления. Пользовательский интерфейс 400, в одном варианте осуществления, отображается на дисплейном экране (например, входном/выходном интерфейсе 110). В одном варианте осуществления пользовательский интерфейс 400 включает в себя график 402 информации об оценке, который детализирует оценку чистки пользователя в каждый раз, когда пользователь чистит зубы. Например, оценка может даваться каждому сеансу чистки, причем чем выше оценка, тем лучше сеанс чистки, и чем ниже оценка, тем хуже сеанс чистки.
[61] В одном примерном варианте осуществления таблица 402 информации об оценке включает в себя утреннюю оценку и вечернюю оценку для каждого дня одной недели. Специалисты в данной области техники признают, что, хотя отображаются только семь (7) дней и два сеанса в день, в таблице 402 информации об оценке может быть включено любое число дней и любое число сеансов. В одном варианте осуществления в пользовательском интерфейсе 400 отображается график 404 информации об оценке, который графически отслеживает оценку чистки пользователя, так что пользователь визуализирует, улучшается ли его техника чистки день ото дня. Может быть особенно полезно для родителей использовать это для своих детей для уверенности в том, что они непрерывно чистят зубы и что они обучаются надлежащему гигиеническому уходу за полостью рта и не повторяют одни и те же неправильные техники.
[62] Пользовательский интерфейс 400 также включает в себя, в иллюстративном варианте осуществления, кнопку 406 "поделиться оценкой" и кнопку 408 "сохранить оценку". Кнопка 406 "поделиться оценкой" обеспечивает возможность совместного использования данных, включенных в таблицу 402 информации об оценке и/или график 404 информации об оценке, с одним или более контактами, веб-сайтами социальных сетей и/или пользовательскими устройствами. Например, пользователь особенно гордый своей оценкой за определенную неделю, может поделиться своей информацией об оценке с членом своей семьи или друзьями. В другом примере пользователь может поделиться своей информацией об оценке со своим стоматологом для информирования его о своем прилежном уходе.
[63] В одном варианте осуществления кнопка 408 "сохранить оценку" обеспечивает пользователю возможность сохранять свою оценку(и) на своем пользовательском устройстве 150. Например, пользователь может сохранять каждую оценку от недели к неделе на своем пользовательском устройстве, так что может создаваться набор надежных данных для просмотра профессионалом в стоматологии при следующем посещении. Сохраненная информация об оценке может сохраняться в памяти на пользовательском устройстве 150 и/или в облачной системе хранения, в которой пользователь имеет аккаунт или которая может быть доступна другим людям (например, родителям, специалистам в стоматологии и т.д.).
[64] Фиг.5A - иллюстративная блок-схема процесса 500 для обеспечения обратной связи пользователю, оперирующему устройством 10 для гигиены полости рта, согласно различным вариантам осуществления. Процесс 500 начинается на этапе 502. В одном варианте осуществления на этапе 502 данные поступают от датчика(ов) 32 устройства 10 для гигиены полости рта. Например, данные могут быть получены от датчика Холла, расположенного на устройстве 10 для гигиены полости рта. В другом варианте осуществления данные поступают от одного или более дополнительных датчиков, расположенных на устройстве 10 для гигиены полости рта, например, датчика силы и/или сочетания датчика силы, датчика Холла и/или акселерометра. В некоторых вариантах осуществления эти данные могут передаваться пользовательскому устройству 150 посредством коммуникационной схемы 108 и 108'. Различные способы, при помощи которых указанные данные могут передаваться от устройства 10 для гигиены полости рта к пользовательскому устройству 150, включают в себя, без ограничения, Bluetooth®, Wi-Fi, сотовую систему передачи данных и/или проводное соединение.
[65] В одном варианте осуществления датчик(и) 32 настраиваются так, чтобы иметь частоту получения данных по меньшей мере вдвое превышающую ожидаемую максимальную частоту движения. Частота движения обычно находится в диапазоне между 0,1 Гц и 8 Гц. Например, если частота движения составляет 0,1 Гц, частота получения данных составит по меньшей мере 0,2 Гц, а если частота движения составляет 8 Гц, частота получения данных должна быть по меньшей мере 16 Гц, например. В одном частном варианте осуществления частота получения данных установлена равной приблизительно 30 Гц. Однако специалисты в данной области техники признают, что может быть установлена любая частота получения данных для любой максимальной частоты движения, и вышеупомянутое является просто примером.
[66] На этапе 504 выполняется предварительная обработка полученных данных при помощи одного или более алгоритмов, хранящихся в памяти 106, процессором(ами) 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150. В одном варианте осуществления предварительная обработка полученных данных обеспечивает возможность такого их изменения, что они могут быть проанализированы быстрее. В одном варианте осуществления предварительная обработка полученных данных соответствует прореживанию или субдискретизации полученных данных. В другом варианте осуществления выполняется сокращение данных в отношении полученных данных для выделения информации о чистящем движении. Например, на полученных данных может выполняться разложение на эмпирические моды (ʺEMDʺ) для превращения исходных сигналов чистящего движения для создания совокупности данных функций внутренних мод (ʺIMFʺ) которые показывают экстремум и/или переходы через нуль в информации о чистящей силе. В еще одном варианте осуществления предварительная обработка полученных данных соответствует применению полосового фильтра для удаления шума/информации о несоответствующих частотах. Например, может применяться низкочастотный фильтр на 4 Гц, который удаляет всю частотную информацию, превышающую 4 Гц. В одном варианте осуществления частотно-амплитудное соотношение может быть изменено с использованием интегрирования и/или дифференцирования по времени. Специалисты в данной области техники признают, что в одном варианте осуществления предварительная обработка полученных данных может не требоваться, поскольку данные, когда первоначально были получены, могли уже находиться в подходящем формате.
[67] На этапе 506 чистящее движение устройства 10 для гигиены полости рта анализируется на основании предварительно обработанных полученных данных. В одном варианте осуществления анализ выполняется процессором 102 устройства 10 для гигиены полости рта и основывается на одном или более алгоритмов, хранящихся в памяти 106 устройства 10 для гигиены полости рта. В другом варианте осуществления анализ выполняется процессором 102 пользовательского устройства 150 и основан на одном или более алгоритмов, хранящихся в памяти 106 пользовательского устройства 150. Пользовательское устройство 150, например, может соответствовать смартфону или планшету, и, таким образом, может включать в себя большие процессинговые возможности, чем устройство 10 для гигиены полости рта. Один или более алгоритмов выполнены с возможностью разложения анализируемых признаков полученных данных, например, частоты чистящего движения и/или амплитуды чистящего движения.
[68] В одном варианте осуществления частота чистящего движения выделяется с помощью анализа Фурье для обнаружения основной частоты движения с помощью обнаружения максимальной амплитуды. Например, на компоненты движения накладывается окно с использованием окна Хэннинга, и затем они отсылаются для быстрого преобразования Фурье (ʺFFTʺ), для выделения основных частот посредством индекса максимальной частотной амплитуды. В другом примере для по существу мгновенной оценки частоты может использоваться преобразование Гильберта.
[69] В другом примерном варианте осуществления частота чистящего движения определяется посредством извлечения экстремумов или числа переходов через нуль в компонентах движения. Подобно оценке частоты, предполагается, что несущая на основной частоте в полученном сигнале является фактически целевой частотой, извлечение экстремумов и/или переходов через нуль обеспечивает возможность корреляции всей системы с экспертной оценкой.
[70] В еще одном примерном варианте осуществления используется трехполосный фильтр. Трехполосный фильтр может обеспечиваться в программном обеспечении, находящимся в устройстве 10 для гигиены полости рта, или, например, пользовательском устройстве 150. Трехполосный фильтр работает для вычисления величины энергии как величины среднего квадратичного значения (ʺRMSʺ) в верхней и нижней полосе из трех полос, относительно величины энергии в средней полосе, для указания основной частоты чистки. Например, после получения сигнала и перевода его в частотную область, определяется величина энергии в каждой из трех полос. Если первая, вторая и третья полоса составляют, соответственно, 0,5-1,5 Гц, 1,5 2.5 Гц и от 2,5 Гц и выше, извлекаются значения энергии для каждой полосы, и определяется полоса, включающая в себя основную величину энергии. Та полоса, которая включает в себя основную величину энергии, выявляет область, включающую в себя основную частоту.
[71] Амплитуда чистящего движения в одном варианте осуществления получается посредством определения расстояния между последовательными экстремумами сигналов движения. Например, расстояние между двумя последовательными экстремумами может соответствовать величине времени между двумя максимальными или минимальными сигналами движения. Сигналы движения могут изменяться по амплитуде во времени, таким образом, расстояние между последовательными экстремумами может именоваться временным расстоянием, или временем между последовательными экстремумами. В другом варианте осуществления амплитуда чистящего движения извлекается на основании амплитуды основной частоты в Фурье-представлении полученных сигналов. В еще одном варианте осуществления амплитуда чистящего движения получается посредством огибающей компоненты движения.
[72] В одном примерном варианте осуществления дополнительные признаки чистящего движения анализируются на основании извлеченных частоты чистящего движения и амплитуды чистящего движения. Производные сигнала могут использоваться для получения различных характеристик пользовательского порядка чистки. Например, производная первого порядка от сигнала чистки дает значение скорости, соответствующей чистящему движению пользователя. Эти данные могут быть использованы для определения, например, насколько быстро пользователь передвигает устройство 10 для гигиены полости рта от зуба к зубу. В другом примере производная второго уровня от сигнала чистки дает значение ускорения, соответствующее чистящему движению пользователя. Кроме того, интегрирование сигналов может использоваться для получения различных характеристик схемы чистки пользователя. Например, ускорение может первоначально быть получено посредством датчика(ов) 32. Ускорение может быть неоднократно проинтегрировано для получения скорости устройства 10 для гигиены полости рта. Второе интегрирование может также выполняться в отношении полученной скорости для создания информации о положении для устройства 10 для гигиены полости рта.
[73] На этапе 508 обеспечивается обратная связь с пользователем, оперирующим устройством 10 для гигиены полости рта, при этом в одном варианте осуществления обратная связь основана на анализе чистящего движения пользователя. В одном варианте осуществления обеспеченная обратная связь соответствует информации, отображенной средствами пользовательского интерфейса, например, пользовательскими интерфейсами 200, 300, 350 и/или 400 на устройстве 10 для гигиены полости рта и/или пользовательском устройстве 150. Информация, отображенная в нем, может информировать пользователя о качестве его чистящего движения. Например, дисплейные экраны 300 и 350 указывают, насколько хорошо пользователь соблюдает заданное чистящее движение, посредством информирования пользователя, когда они чистят ниже целевого чистящего движения или выше целевого чистящего движения. В другом примере пользовательский интерфейс 200 указывает амплитуду и/или частоту чистящего движения пользователя, а также информативные сообщения, позволяющие пользователю знать, насколько его имеющееся чистящее движение соотносится с заданным целевым чистящим движением.
[74] В одном варианте осуществления пользователю обеспечивается аудио, визуальная и/или тактильная обратная связь на основании анализа его чистящего движения. Например, если пользователь прикладывает большее, чем требуется, давление, устройство 10 для гигиены полости рта и/или пользовательское устройство 150 может обеспечивать вибрацию, аудио сигнал (например, звонок), и или визуальный сигнал (например, мигающий сигнал), информирующий пользователя, что его чистящее движение является неправильным.
[75] В одном варианте осуществления размер устройства 10 для гигиены полости рта определяет, какой тип обратной связи предоставляется пользователю. Например, если пользовательское устройство 150 не используется, и устройство 10 для гигиены полости рта является слишком маленьким для того, чтобы включать в себя дисплейный экран, или ориентировано так, что при чистке пользователь не может видеть дисплейный экран, визуальная обратная связь может быть затруднительна или неэффективна. В этом частном случае может быть более подходящим аудиосигнал или тактильный ответ. Однако специалисты в данной области техники признают, что может обеспечиваться любой тип обратной связи для пользователя любым подходящим способом, и вышеупомянутое является просто примером. Например, дисплейный экран на пользовательском устройстве 150 может отображать пользовательский интерфейс 300 или 350, которые могут указывать пользователю, оперирующему устройством 10 для гигиены полости рта, что его чистящее движение слишком медленное или слишком быстрое, при этом одновременный аудиосигнал может генерироваться устройством 10 для гигиены полости рта для обозначения неправильной техники чистки пользователя.
[76] Фиг.6 - иллюстративная схема системы 2, включающей в себя пользовательское устройство 150 и устройство 10 для гигиены полости рта согласно различным вариантам осуществления. Пользовательское устройство 150 системы 2, в одном иллюстративном неограничивающем варианте осуществления, включает в себя камеру 602 и дисплейный экран 604. Например, пользовательское устройство 150 может соответствовать смартфону или планшету пользователя, который может включать в себя установленное в нем программное обеспечение для анализа чистящего движения пользователя, когда он оперирует устройством 10 для гигиены полости рта. В одном варианте осуществления движение пользователя, оперирующего устройством 10 для гигиены полости рта, может быть видно /отслеживаться камерой 602 пользовательского устройства 150 для анализа, а также для предоставления обратной связи пользователю, оперирующему устройством 10 для гигиены полости рта, что более подробно объяснено ниже. В одном варианте осуществления пользовательское устройство 150 и устройство 10 для гигиены полости рта выполнено с возможностью соединения друг с другом посредством средства 610 соединения. Средство 610 соединения включает в себя любое беспроводное или проводное соединение, включающее в себя, без ограничения, Bluetooth®, Wi-Fi, сотовую передачу (например, LTE) и/или проводное соединение. В одном варианте осуществления средство 610 соединения делает возможным обеспечение обратной связи от пользовательского устройства 150 к устройству 10 для гигиены полости рта, или наоборот. В другом варианте осуществления пользовательское устройство 150 дополнительно включает в себя один или более дополнительных компонентов, например, схему обработки, схему обратной связи и/или схему зарядки. В одном варианте осуществления пользовательское устройство 150 включает в себя схему 656 зарядки, выполненную с возможностью зарядки системы 14 питания устройства 10 для гигиены полости рта. Например, пользовательское устройство 150 может представлять собой базовую станцию, совместимую с устройством 10 для гигиены полости рта.
[77] Фиг.7 - иллюстративная блок-схема пользовательского устройства 150 согласно различным вариантам осуществления. Пользовательское устройство 150 может представлять собой смартфон или планшет, или может представлять собой базовую станцию для электронной зубной щетки (например, устройство 10 для гигиены полости рта) или электронную бритву. В еще одном примерном варианте осуществления пользовательское устройство 150 также включает в себя одну или более камер для сбора изображений и/или видео.
[78] В иллюстративном примерном варианте осуществления пользовательское устройство 150 включает в себя один или более процессоров 102, хранилище 104 данных, память 106, коммуникационную схему 108 и входной/выходной интерфейс 110. В одном примерном варианте осуществления камера 602 соответствует любому компоненту захватывания изображения, способному захватывать изображения и/или видео. Например, камера 602 может захватывать фотографии, последовательности фотографий, быстрые снимки, видео, 3D-изображения /видео или любые другие типы изображения, или любое сочетание перечисленного.
[79] В иллюстративном варианте осуществления входной/выходной интерфейс 110 может также включать в себя дисплей 604 и динамик 718 или любой другой подходящий механизм или компонент для генерирования выходных сигналов. В одном варианте осуществления дисплей 604 соответствует любому типу дисплея, способному представлять контент пользователю и/или на пользовательское устройство 150. Дисплей 604 может иметь любой размер и располагаться на одной или более областях/сторонах пользовательского устройства 150. Например, дисплей 604 может полностью занимать первую сторону пользовательского устройства 150, или может занимать только часть первой стороны. Различные типы дисплеев включают в себя, без ограничения, жидкокристаллические дисплеи (ʺLCDʺ), монохромные дисплеи, дисплеи с цветовым графическим адаптером (ʺCGAʺ), дисплеи с улучшенным графическим адаптером (ʺEGAʺ), дисплеи с переменной графической матрицей (ʺVGAʺ) или любой другой тип дисплея, или любое сочетание перечисленного. В одном варианте осуществления дисплей 604 представляет собой сенсорный экран и/или интерактивный дисплей. В другом варианте осуществления сенсорный экран включает в себя мультисенсорную панель, соединенную с процессором(ами) 702 пользовательского устройства 150. В еще одном варианте осуществления дисплей 604 представляет собой сенсорный экран, включающий в себя емкостные чувствительные панели.
[80] В одном варианте осуществления динамик 718 соответствует любому подходящему механизму выведения аудиосигналов. Например, динамик 718 может включать в себя один или более блоков динамика, преобразователей или группу динамиков и/или преобразователей, выполненных с возможностью трансляции аудиосигналов и аудиоконтента пользователю, взаимодействующему с пользовательским устройством 150. В одном варианте осуществления динамик 718 соответствует наушникам или внутриушным наушникам, выполненным с возможностью трансляции аудио непосредственно пользователю, оперирующему пользовательским устройством 150.
[81] В одном примерном варианте осуществления пользовательское устройство 150 включает в себя один или более компонентов устройства 10 для гигиены полости рта, представленных на фиг.1A. Например, пользовательское устройство 150 может включать в себя датчик(и) 32, магнит(ы) 30, блок 12 приводного механизма, систему 14 питания, микропроцессорный блок 15 управления и прикрепляемый блок 20. Специалисты в данной области техники признают, что хотя пользовательское устройство 150 включает в себя один или более признаков устройства 10 для гигиены полости рта, может быть добавлено любое число дополнительных компонентов, или может быть удалено любое число компонентов, и вышеупомянутое описание является просто примером. Кроме того, в одном варианте осуществления пользовательское устройство 150 по существу аналогично устройству 100 для гигиены полости рта, представленному на фиг.1B, за исключением того, что первый включает в себя одно или более из камер 602, дисплея 604 и/или динамика 718.
[82] В одном примерном варианте осуществления пользовательское устройство 150 соответствует устройству 10 для гигиены полости рта, за исключением того, что первый включает в себя вмонтированную в него камеру 602. В одном варианте осуществления камера 602 может быть наружной, так что она выступает из корпуса 18 устройства 10 для гигиены полости рта для захватывания изображений прикрепляемого блока 20 (например, чистящего элемента 21), при взаимодействии с зубами пользователя. В другом варианте осуществления камера 602 вмонтирована в прикрепляемый блок 20. В этом частном случае камера 602 может включать в себя одну или более ламп (например, светодиодов, инфракрасных) для освещения участка полости рта пользователя, с которым он взаимодействует. Различные ориентиры в полости рта пользователя затем могут использоваться как реперная точка для определения движения и/или качества чистки. Например, в качестве "ориентира" для определения, где в полости рта пользователя расположено устройство 10 для гигиены полости рта, может использоваться язык, небо или небный язычок пользователя. В одном варианте осуществления движение можно определить на основании изменений в полученных изображениях между одним изображением и последующим изображением на основании различий между двумя изображениями, например, различиями в положении зуба или зубов относительно физического ориентира.
[83] Фиг.8 - иллюстративная схема изображения 800 пользователя согласно различным вариантам осуществления. Изображение 800 включает в себя лицо 802, шею 804 и туловище 806 пользователя. Голова 802 включает в себя глаза 808, нос 810 и рот 812. В одном варианте осуществления для описания пользователя может быть включен один или более дополнительных признаков, включающих в себя, без ограничения, уши, брови, подбородки, щеки, волосы и/или ноздри.
[84] В одном варианте осуществления целевая область 820 включена в изображение 800 пользователя. В одном варианте осуществления целевая область 820 соответствует соответствующему участку пользователя, где происходит движение, соответствующее пользователю, оперирующему устройством 10 для гигиены полости рта, например, как представлено на фиг.9. Например, целевая область 820 может, когда пользователь чистит зубы, соответствовать области, окружающей рот 812. В другом примере если пользователь бреется, целевая область 820 может быть несколько больше, так что включает в себя участки лица 802 пользователя, которые он может брить.
[85] В одном варианте осуществления целевая область 820 может задаваться пользователем заранее. Например, пользователь может вручную нарисовать контур целевой области 820 на пользовательском интерфейсе, отображенном на дисплейном экране 604 пользовательского устройства 150. В другом примере пользователь может быть представлен целевой областью 820, приближенно установленной пользовательским устройством 150, и пользователь может вручную регулировать границы целевой области 820, так чтобы они более соответствовали лицевой структуре пользователя.
[86] В одном варианте осуществления целевая область 820 определяется на основании обнаружения одного или более лицевых или телесных признаков пользователя пользовательского устройства 150. В одном примерном варианте осуществления обнаружение лица 802 пользователя и туловища 806 пользователя выполняются с использованием любого подходящего лицевого датчика. Например, для обнаружения целевой области 820 в изображении 800a может использоваться схема обнаружения объекта Виолы-Джонса. В одном варианте осуществления последовательные изображения, захваченные камерой 602 пользовательского устройства 150, имеют детектор лица Виолы-Джонса, используемый для определения расположения различных лицевых признаков в изображении 800 пользователя. После определения различных лицевых признаков (например, носа 810, рта 812 и т.д.) для ограничения целевой области 820 может использоваться Уравнение 1.

[87] В уравнении 1 ROI - целевая область, ROIpreviousможет включать в себя полное предыдущее изображение или установленную вручную целевую область от предыдущего изображения, FaceArea - область лица 802 в изображении 800 пользователя, FaceCoordinates- координаты, определяющие место лица 802 в изображении 800, и Height - рост пользователя. Специалисты в данной области техники признают, что коэффициент 1,5 при росте пользователя является просто приближенным положением рта пользователя, и любая из этих переменных может, соответственно, модифицироваться или увеличиваться.
[88] В другом примерном варианте осуществления обнаруживаются лицевые признаки пользователя в изображении 800. Например, для обнаружения лицевых признаков пользователя может использоваться методом контролируемого спуска (ʺSDMʺ). SDM, в целом, изучает серии обновлений параметров, которые пошагово минимизируют среднее значение всех функций нелинейных наименьших квадратов (ʺNLSʺ) в процессе обучения. SDM особенно полезен в случае, когда ньютонов метод выравнивания изображения не работает (например, когда матрица Гессе для изображения является положительно определенной в локальном минимуме, но может не быть таковой в каком-то другом месте, и функция является дважды дифференцируемой).
[89] В одном варианте осуществления последовательные изображения, захваченные камерой 602 пользовательского устройства 150, определяют целевую область как область ниже обнаруженных лицевых признаков, используя уравнение 2.

[90] В уравнении 2, FFAreaопределяется как [Min(X),Min(Y),Max(X),Max(Y)] для изображений, захваченных камерой 602. В одном варианте осуществления ROIpreviousсостоит из полного изображения 800 или введенной вручную целевой области.
[91] В еще одном примерном варианте осуществления целевая область 820 изображения 800 обнаруживается на основании метода вычитания фона. Например, камера 602 пользовательского устройства 150 может захватывать набор последовательных изображений пользователя, например, видео пользователя, и выделять изображение переднего плана/маску пользователя. Лицевая область (например, лицо 802) выделяется, в одном варианте осуществления, с использованием сопоставления со скелетом, и целевая область 820 определяется уравнением 1. Вычитание фона, в целом, обеспечивает возможность сравнения двух или более изображений, так что некоторый неподвижный участок изображений удаляется для выделения на первый план определенного участка. Например, для движущегося изображения, наложенного на неподвижный фон, можно удалить неподвижный фон, используя вычитание фона, поскольку неподвижный фон постоянен от изображения к изображению.
[92] В еще одном примерном варианте осуществления целевая область 820 изображения 800 обнаруживается на основании 3D-моделирования. Различные типы 3D-моделирования включают в себя, без ограничения, сопоставление 3D моделей с распределениями форм, сопоставление формы посредством распознавания объектов с использованием контекстов формы, и дескрипторы симметрии для сопоставления 3D-формы, или любой другой тип метода 3D-моделирования, или любое сочетание перечисленного. Например, для обнаружения лица 802 изображения 800 может использоваться один или более методов 3D-моделирования для определения целевой области 820. В другом примере целевая область может обнаруживаться посредством выбора области изображения 800, включающей в себя конкретную часть тела пользователя (например, кисти пользователя). В еще одном примере может использоваться сопоставление 3D-формы для сопоставления устройства 10 для гигиены полости рта с заранее вычисленной компьютерной моделью устройства для гигиены полости рта для определения целевой области 820 посредством анализа местоположения устройства 10 для гигиены полости рта в изображении 800.
[93] В еще одном примерном варианте осуществления обнаружение целевой области 820 выполняется посредством выделения физических ориентиров на пользователе и/или устройстве 10 для гигиены полости рта. В одном варианте осуществления может использоваться определенный цвет, край, текстура или другие указания для точного установления местонахождения целевой области 820. Например, устройство 10 для гигиены полости рта может иметь корпус 18 красного цвета. В этом частном случае пользовательское устройство 150 может анализировать изображения, захваченные камерой 602 и выделять движение любого объекта красного цвета, таким образом отслеживая устройство 10 для гигиены полости рта. В другом варианте осуществления световые маркеры, например, светодиоды, используются для точного установления целевой области 820. Например, устройство 10 для гигиены полости рта может включать в себя один или более инфракрасных светодиодов, которые могут распознаваться пользовательским устройством 150 для определения целевой области 820.
[94] Специалисты в данной области техники признают, что может использоваться любой из вышеупомянутых методов для определения целевой области 820 в изображении 800 пользователя, или может использоваться любой дополнительный метод или способ, и указанные примерные варианты осуществления не должны истолковываться как ограничивающие. Кроме того, один или более из вышеупомянутых методов может также использоваться для определения чистящего движения пользователя после определения целевой области 820 или по существу в то же время, когда определяется целевая область 820. Более подробное объяснение одного или более вышеупомянутых методов также описано ниже и на нижеприведенных чертежах.
[95] Фиг.9A и 9B - иллюстративные схемы, описывающие изменения положения устройства 10 для гигиены полости рта согласно различным вариантам осуществления. Первое изображение 900 пользователя включает в себя, в одном варианте осуществления, лицо 802 пользователя, глаза 808, нос 810 и рот 812. Кроме того, первое изображение 900 включает в себя пользовательское устройство, которое, в одном примерном варианте осуществления, соответствует устройству 10 для гигиены полости рта или пользовательскому устройству 150. Когда пользователь чистит зубы, камера, например, камера 602, захватывает новое месторасположение устройства 10 для гигиены полости рта на втором изображении 950. Устройство 10 для гигиены полости рта на втором изображении 950 находится в положении, отличном от положения на первом изображении 900 относительно пользователя на обоих изображениях 900 и 950. В одном варианте осуществления первое и второе изображения 900 и 950 представляют собой два отдельных изображения, захваченных камерой 602 пользовательского устройства 150, однако первое и второе изображения 900 и 950 могут также представлять собой последовательные изображения, полученные посредством видео, захваченного камерой 602.
[96] Фиг.10 - иллюстративная схема, описывающая изменения положения устройства 10 для гигиены полости рта на основании изменения пиксельного положения и рамки согласно различным вариантам осуществления. В иллюстративном варианте осуществления устройство 10 для гигиены полости рта из первого изображения 900, представленного на фиг.9A, имеет первоначальное пиксельное положение P1, которое имеет двухмерное первое пиксельное положение (X1, Y1) и первое время T1, когда было захвачено первое изображение 900. Устройство 10 для гигиены полости рта на втором изображении 950 имеет второе пиксельное положение P2, в котором имеется двухмерное второе пиксельное положение (X2, Y2) и второе время T2, в которое было захвачено второе изображение 950.
[97] На основании указанных координат (например, пикселя и времени) устройства 10 для гигиены полости рта на первом изображении 900 и втором изображении 950 может быть определено изменение в вертикальном смещении (например, ΔY) и изменение в горизонтальном смещении (например, ΔX). Введя изменение времени (например, ΔT), можно приближенно получить движение устройства 10 для гигиены полости рта. Специалисты в данной области техники признают, что вышеупомянутое является просто приближением, и различные дополнительные факторы, например, масштабирование, задержка и разрешение, могут также влиять на характеристики движения устройства 10 для гигиены полости рта.
[98] Фиг.11 - иллюстративная схема, описывающая изменения положения устройства 10 для гигиены полости рта на основании изменения вектора положения между устройством 10 для гигиены полости рта и реперным объектом согласно различным вариантам осуществления. В иллюстративном варианте осуществления первый вектор 904A положения определяется процессором 102 пользовательского устройства 150, который указывает расстояние и/или угол между устройством 10 для гигиены полости рта и реперным объектом, например, носом 810 пользователя. Специалисты в данной области техники признают, что может использоваться любой другой реперный объект, включающий в себя, без ограничения, глаза 808, рот 812, шею 804, туловище 806 или любой другой признак пользователя или фона, или любое сочетание перечисленного.
[99] В одном варианте осуществления первый вектор 904A положения включает в себя информацию, относящуюся к положению устройства 10 для гигиены полости рта относительно носа 810 пользователя на первом изображении 900. На втором изображении 950 положение устройства 10 для гигиены полости рта изменилось и информация, относящаяся к новому положению устройства 10 для гигиены полости рта относительно носа 810 пользователя включена во второй вектор 904B положения. Каждый из векторов 904A и 904B положения анализируется пользовательским устройством 150, и относительное движение пользовательского устройства 902 определяется на основании изменения положения и времени изменения векторов 904A и 904B положения. Могут использоваться различные методы для оценки движения между последовательными изображениями 900 и 950, использующие векторы положения, например, векторы 904A и 904B положения, включающие в себя, без ограничения, 3DRS и Optical Flow. Специалисты в данной области техники признают, однако, что может использоваться любой метод выделения движения, вышеупомянутое является просто примером.
[100] Фиг.12 - иллюстративная схема, описывающая изменения положения устройства 10 для гигиены полости рта на основании изменения центра тяжести захваченного изображения согласно различным вариантам осуществления. В одном примерном варианте осуществления выделение движения выполняется с использованием методов абсолютной разности кадров. Например, двоичное разностное изображение ImDiff вычисляется, используя уравнение 3:

[101] В уравнении 3 ImCurrent соответствует текущему изображению, а ImPrevious соответствует предыдущему изображению. Например, ImCurrent может соответствовать изображению 950 фиг.9B, захваченному камерой 602 пользовательского устройства 150, а ImPrevious может соответствовать изображению 900 фиг.9A. Разность между ImCurrent и ImPrevious берется за абсолютную величину. Кроме того, в уравнении 3, Threshold соответствует переменной, которая может быть установлена пользователем, оперирующему пользовательским устройством 150, или она может быть задана пользовательским устройством 150. Например, Threshold может соответствовать величине шума, связанного с камерой 602 и/или с фоновой средой.
[102] В одном варианте осуществления разность между ImCurrent и ImPrevious из уравнения 3 проецируется на ось x и ось y плоскости изображения, приводя к формированию двух сигналов, ProjX и ProjY. В одном варианте осуществления ProjX определяется как сумма ImDiff по оси y для всех значений, а ProjY определяется как сумма ImDiff по оси x для всех значений. Затем выделяется максимальное значение и ProjX и ProjY, и, в одном варианте осуществления используется в качестве ʺцентра тяжестиʺ движения. Например, первый центр тяжести 906A может представлять собой центр тяжести между устройством 10 для гигиены полости рта и носом 810 в изображении 900, а второй центр тяжести 906B может представлять собой центр силы между устройством 10 для гигиены полости рта и носом 810 на изображении 950. В одном варианте осуществления каждый из центров тяжести 906A и 906B вычисляется на основании указанного ImDiff между этим конкретным изображением и предыдущим изображением. Таким образом, центр тяжести 906B, например, может быть вычислен на основании максимального значения и ProjX и ProjY для изображений 900 и 950. В одном варианте осуществления разность между следующими друг за другом центрами тяжести используется для определения движения устройства 10 для гигиены полости рта. Например, для определения движения устройства 10 для гигиены полости рта может использоваться разность между центрами тяжести 906A и 906B.
[103] В одном примерном варианте осуществления в ответ на извлечение характеристик движения выполняется анализ движения пользователя. Посредством анализа и характеризации движения пользователя могут выполняться исходные сигналы движения (например, данные, полученные посредством одной или более камеры 602 и/или датчика(ов) 32) могут преобразовываться в различные характеристики движения, например, частоту движения, амплитуду движения и/или траекторию движения.
[104] В одном варианте осуществления анализ выполняется посредством предварительной обработки полученных данных. Например, для выделения информации в полученных данных, соответствующих движению пользовательского устройства (например, устройства 10 для гигиены полости рта), могут использоваться различные методы сокращения данных, и эта информация может быть объединена в одну новую компоненту движения. Различные методы сокращения данных включают в себя, без ограничения, анализ главных компонентов (ʺPCAʺ), анализ независимых компонентов (ʺICAʺ), применение низкочастотного/высокочастотного полосового фильтра или любой другой метод сокращения данных, или любое сочетание перечисленного. Например, низкочастотный полосовой фильтр с отсечением 4 Гц может использоваться для удаления нежелательных высокочастотных данных.
[105] В другом варианте осуществления анализ включает в себя выполнение частотной характеризации. В одном варианте осуществления частота движения выделяется посредством использования анализа Фурье для нахождения основной частоты движения посредством обнаружения максимальной амплитуды. Например, компоненты движения могут заключаться в окно с использованием окна Хеннинга, и затем посылаться на FFT, где основные частоты могут быть извлечены посредством индекса максимальной частотной амплитуды. В одном варианте осуществления частотная характеризация включает в себя получение частоты движения из полученных данных посредством выделения экстремумов (например, минимумов и/или максимумов), или числа переходов через нуль, из компонентов движения. Кроме того, как ранее было рассмотрено, в одном варианте осуществления с помощью любого подходящего метода выполняется амплитудная характеризация.
[106] В одном примерном варианте осуществления нет необходимости методах сокращения данных. В этом случае характеристики движения (например, амплитудные характеристики и/или частотные характеристики) получаются посредством использования одного или более дополнительных методов. Например, характеристики x-направления и/или y-направления движения могут объединяться. В другом примере может использоваться линейное сочетание характеристик движения x-направления и/или y-направления. В еще одном примере могут использоваться характеристики, соответствующие сильнейшей частотной компоненте амплитудной компоненты. В еще одном примере могут использоваться характеристики, соответствующие частотному компоненту, наиболее близкому к, или наиболее далекие от целевой частотной компоненты. Специалисты в данной области техники признают, что использование ʺx-направленияʺ и ʺy-направленияʺ является просто иллюстративным, и вместо них могут использоваться любые два направления (например, x- и y-направление, x- и z-направление, y- и z-направление). Кроме того, специалисты в данной области техники признают, что целевая частота и/или сильнейшая частотная компонента может соответствовать любому частотному компоненту в частотном спектре системы, и может быть выбрана перед выполнением и/или изменяться при выполнении анализа данных.
[107] Фиг.13 - иллюстративная схема различных пользовательских интерфейсов согласно различным вариантам осуществления. Пользовательские интерфейсы отображают различные графические изображения, включающие в себя обратную связь, предоставляемую пользователю, оперирующему устройством 10 для гигиены полости рта или пользовательским устройством 150. Например, если определено, что пользователь чистит зубы слишком быстро, дисплей 604 пользовательского устройства 150 может представлять пользователю сообщение 1002 обратной связи. В другом примере, если определяется, что пользователь чистит зубы слишком медленно, дисплей 604 пользовательского устройства 150 может представлять пользователю сообщение 1004 обратной связи, советуя пользователю увеличить скорость. В еще одном примере, если определено, что пользователь правильно чистит зубы, дисплей 604 пользовательского устройства 150 может представлять пользователю сообщение 1006 обратной связи. В еще одном примере, если определено, что пользователь чистит участок зубов, который уже был почищен, или чистит определенную область слишком долго, дисплей 604 пользовательского устройства 150 может представить пользователю сообщение 1008 обратной связи, советующее пользователю изменить положение чистки.
[108] Фиг.14 - иллюстративная блок-схема процесса 1100 согласно различным вариантам осуществления. Процесс 1100 начинается этапом 1102. На этапе 1102 получают данные от одной или более камер, расположенных на пользовательском устройстве. Например, камера 602 пользовательского устройства 150 может захватывать одно или более изображений и/или видео чистки пользователем зубов с помощью устройства 10 для гигиены полости рта). В другом примере указанные данные могут быть получены с использованием датчика изображения КМОБ или ПЗС, а также, или в дополнение, системой камер 3D. Кроме того, в одном варианте осуществления полученные данные включают в себя данные, полученные от одного или более захваченных изображений /видео и одного или более датчиков, например, датчика(ов) 32 (например, датчика Холла, датчика силы и/или акселерометра) устройства 10 для гигиены полости рта. Например, пользовательское устройство 150 может захватывать видео пользователя, используя устройство 10 для гигиены полости рта, при этом также получая данные от датчика(ов) 32.
[109] В одном варианте осуществления частота получения данных камеры 602 позволяет извлекать соответствующую информацию о движении. Например, частота движения и/или амплитуда движения могут извлекаться из изображений, захваченных камерой 602. В одном варианте осуществления частота получения данных камеры 602 устанавливается равной по меньшей мере двукратной ожидаемой максимальной частоте движения. Например, если предполагаемая частота движения составляет 10 Гц, частота получения данных составит 20 Гц.
[110] В одном примерном варианте осуществления имеется дополнительный этап (не представлен) предварительной обработки полученных данных. Этот необязательный этап может быть по существу аналогичен этапу 504 процесса 500. Например, предварительная обработка полученных данных может уменьшать размер изображения в четыре (4) раза для уменьшения относительно больших изображений, захваченных камерой 602.
[111] В другом примерном варианте осуществления может существовать сокращение видеоканалов для видеоизображений, захваченных камерой 602 пользовательского устройства 150. Например, красный, зеленый и синий каналы захваченного видео могут быть преобразованы в один канал яркости с использованием уравнения 4:

[112] В уравнении 4 Y представляет собой один канал яркости, R представляет собой красный канал, G - зеленый канал и B - синий канал. Специалисты в данной области техники признают, что коэффициенты для каждого из красного, зеленого и синего канала могут быть соответственно модифицированы в зависимости от требуемых настроек, и использование указанных коэффициентов в уравнении 4 является просто примером.
[113] В другом примере любой входной канал видео, захваченного камерой 602, может объединяться с использованием любого линейного или нелинейного сочетания входных каналов. В еще одном примере может использоваться только один видеоканал, например, зеленый видеоканал. В этом частном случае может использоваться зеленый видеоканал, поскольку он обычно включает в себя максимальную энергию видеосигнала.
[114] На этапе 1104 определяется целевая область. Целевая область представляет собой область или участок изображения пользователя, на который направлен надлежащий анализ движения. Например, для пользователя, чистящего зубы, целевая область 820 соответствует области, окружающей и включающей в себя рот. Для различной деятельности, например, бритья, ухода за волосами, очистки межзубных промежутков и т.д., целевая область 820 может соответствующим образом изменяться для включения в себя участка(ов) изображения пользователя, которые включают в себя предполагаемые области, где будет происходить движение.
[115] Для определения целевой области могут использоваться различные методы. Например, целевая область может задаваться пользователем и/или пользовательским устройством, или целевая область может выбираться пользователем. В одном варианте осуществления целевая область определяется автоматически на основании выявления признаков. Например, лицо и грудь пользователя могут обнаруживаться с использованием детектора лица Виола-Джонса или SMD с помощью уравнения 2. В другом примере для определения целевой области могут использоваться методы вычитания фона, а также 3-D моделирование и/или извлечение маркера.
[116] На этапе 1106 извлекается движение устройства с использованием целевой области, определенной на этапе 1104. Извлечение движения устройства может выполняться с использованием различных методов. В одном варианте осуществления для извлечения движения используются методы оценки движения. Например, векторы движения извлекаются с использованием оценки движения между последовательными изображениями (например, с использованием методов 3DRS и/или Optical Flow). В одном варианте осуществления для извлечения движения используется отслеживание объекта. Например, движение извлекается посредством отслеживания реального или виртуального объекта (например, устройства 10 для гигиены полости рта), или относительного расстояния между объектом и репером (например, вектором между устройством 10 для гигиены полости рта и носом 810 пользователя). В еще одном варианте осуществления для извлечения движения используется абсолютная разность кадров. В данном случае вычисляется двоичное изображение разности между первым изображением и вторым изображением, и затем определяется максимальное значение по каждой оси изображения, и оно используется в качестве центра тяжести для указанного движения. Затем для определения движения в последовательных изображениях используются различные центры тяжести.
[117] На этапе 1108 извлеченное движение анализируется и раскладывается на различные компоненты, например, частоту движения, амплитуду движения и/или траекторию движения. В одном варианте осуществления для уменьшения данных используется предварительная обработка. Например, для удаления несоответствующей или ненужной информации к данным может применяться PCA, ICA или полосовой фильтр. В одном варианте осуществления для извлечения частоты движения может выполняться определение частотной характеристики. Например, частота движения может быть извлечена с помощью анализа Фурье для обнаружения основной частоты движения и/или посредством извлечения экстремумов или переходов через нуль в компонентах движения. В одном варианте осуществления для извлечения амплитуды движения выполняется определение амплитудной характеристики. Например, для извлечения амплитуды движения может использоваться расстояние между последовательными экстремумами, основная частота в представлении Фурье и/или огибающая компонентов движения компонентов.
[118] На этапе 1110 пользователю предоставляется обратная связь на основании анализа, выполненного на этапе 1108. В одном варианте осуществления характеристики движения сравниваются с целевым движением, хранящимся на пользовательском устройстве. Например, заранее определенное целевое движение пользователя, чистящего зубы, может быть сохранено в хранилище 104 данных или память 106 на пользовательском устройстве 150. После извлечения движения пользовательского устройства (например, устройства 10 для гигиены полости рта), оно может быть проанализировано посредством сравнения его с предварительно определенным целевым движением. Результаты этого анализа могут быть представлены пользователю на дисплее 604 пользовательского устройства 150, так что пользователь обладает возможностью изменить свое движение для соответствия предварительно определенному целевому движению. Например, дисплей 604 может представить пользовательские интерфейсы 1002, 1004, 1006 или 1008, представленные на фиг.11, или пользовательские интерфейсы 200, 300, 300' и/или 400.
[119] В одном варианте осуществления для вычисления оценки, представленной пользователю в реальном времени или после выполнения движения, используются характеристики движения. Например, как видно на фиг.4, пользовательский интерфейс 400 включает в себя различные оценки сеансов чистки пользователя. Оценки вычисляются и могут быть представлены пользователю, так что он может видеть дни или время, когда они чистил зубы хорошо или плохо. В другом примере пользователю могут быть представлены пользовательские интерфейсы 300 или 300', которые могут позволить пользователю видеть в реальном времени, насколько хорошо он придерживается целевого окна 310 чистки. Если чистка слишком низкая (например, пользовательский интерфейс 300), пользователь может изменить свою чистку для увеличения давления и/или частоты, а если чистка слишком интенсивная (например, пользовательский интерфейс 300'), пользователь может изменить чистку для уменьшения давления или частоты.
[120] Фиг.15 - иллюстративная схема устройства 10 для гигиены полости рта, используемого согласно различным вариантам осуществления. Система 1200 взаимодействия с пациентом включает в себя, в одном примерном неограниченном варианте осуществления, лицо 802 и рот 812 пациента, оперирующего устройством 10 для гигиены полости рта. Когда пациент чистит зубы, язык, десны и т.д., пациент перемещает устройство 10 для гигиены полости рта, так что происходит очищающее движение вокруг зубов пациента (см. фиг.16A E).
[121] В зависимости от ориентации зубов пациента перемещение устройства 10 для гигиены полости рта при чистке зубов пациентом (например, направления очистки) различается. Например, пациент может перемещать устройство 10 для гигиены полости рта в первом и втором направлении, как показано стрелкой 1202, или устройство 10 для гигиены полости рта может перемещаться в третьем и четвертом направлении, как показано стрелкой 1204. Перемещение устройства 10 для гигиены полости рта в первом и втором направлении может, например, быть более подходящим для очистки передних зубов пациента, а перемещение устройства 10 для гигиены полости рта в третьем и четвертом направлениях может быть более подходящим для очистки задних зубов пациента. Однако специалисты в данной области техники признают, что устройство 10 для гигиены полости рта может быть перемещено в любом подходящем направлении для выполнения чистящего или очищающего действия, и вышеприведенное является просто примером. Кроме того, пациент может чистить один или более зубов в одном или более направлениях (например, передний зуб или зубы могут чиститься по направлениям обеих стрелок 1202 и 1204).
[122] Фиг.16A-E - иллюстративные схемы прикрепляемого блока 20 устройства для гигиены полости рта, используемого для чистки одного или более зубов 1304 согласно различным вариантам осуществления. В проиллюстрированном примерном варианте осуществления рот 812 пациента включает в себя десны 1302, имеющие множество зубов 1304. Рот 812 пациента может соответствовать верхнему или нижнему участку рта пациента, например, участку верхней челюсти или участку нижней челюсти.
[123] В одном варианте осуществления пациент перемещает прикрепляемый блок 20 устройства 10 для гигиены полости рта в первом направлении 1202a для обеспечения чистящего действия на зубы 1304. Чистящее действие, или чистящее движение, может выполняться в любом подходящем направлении, так что прикрепляемый блок 20 перемещается вдоль десен 1302, имеющих зубы 1304. Как видно на фиг.16B и 16C, прикрепляемый блок 20 перемещается перпендикулярно передней поверхности зубов 1304. Например, прикрепляемый блок 20 устройства 10 для гигиены полости рта может чистить наружную поверхность зубов 1304 и/или внутреннюю поверхность зубов 1304.
[124] Когда прикрепляемый блок 20 перемещается возвратно-поступательно вдоль первого направления 1202a и второго направления 1202b, один или более датчиков 32 в устройстве 10 для гигиены полости рта могут обнаруживать перемещение прикрепляемого блока 1306. Например, датчики 32 устройства 10 для гигиены полости рта могут соответствовать одному или более акселерометрам. Различные типы акселерометров включают в себя, без ограничения, автономные акселерометры, части или полностью один или более инерциальных измерительных блоков (ʺIMUʺ), гироскопы и/или магнитoметры. Акселерометры могут также представлять собой одноосные или многоосные акселерометры. Например, различные одноосные акселерометры могут использоваться в устройстве 10 для гигиены полости рта для обнаружения изменений в движении устройства 10 для гигиены полости рта вдоль множества осей (например, оси x, y и/или z). В другом примере могут использоваться многоосные акселерометры для обнаружения движения устройства 10 для гигиены полости рта вдоль двух или более осей (например, осей x и y, осей x и z, осей y и z или осей x, y, z). В одном частном варианте осуществления устройство 10 для гигиены полости рта включает в себя по меньшей мере один акселерометр вдоль продольной оси приводного вала 23. В одном примерном варианте осуществления может быть выполнен слепой анализ с использованием различных многоосных и/или одноосных акселерометров. Например, различные многоосные и/или одноосные акселерометры могут быть выполнены с возможностью обнаружения движения во всех пространственных направлениях и анализа величины энергии, частоты и/или амплитуды, обнаруженных по каждой оси. Движение устройства 10 для гигиены полости рта затем может быть воссоздано на основании определенного движения.
[125] В одном варианте осуществления процессор(ы) 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150 задает частоту получения данных от акселерометров в устройстве 10 для гигиены полости рта так, чтобы она составляла по меньшей мере двукратную ожидаемую максимальную частоту движения чистки/очистки. Акселерометры обнаруживают движение устройства 10 для гигиены полости рта, когда они двигаются вдоль различных осей для выполнения чистящего движения (например, двигаются вдоль направлений 1202a и/или 1202b). Когда движение, обнаруженное акселерометром, соответствует надлежащей технике чистки /очистки, процессор(ы) 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150 предоставляют информацию (как описано ниже), что чистящее движение является правильным. Если обнаруженное акселерометром движение соответствует ненадлежащей технике чистки/очистки, процессор(ы) 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150 предоставляет информацию.
[126] Фиг.16D и 16E - различные виды в перспективе чистящего движения, описанного на фиг.16B и 16C, согласно различным вариантам осуществления. Для обеспечения надлежащего гигиенического ухода за полостью рта пациенту следует чистить зубы 1304 так, чтобы величина боковой силы, действующей на прикрепляемый блок 20 (например, чистящую головку) устройства 10 для гигиены полости рта, была минимальной. Когда прикрепляемый блок 20 перемещается вдоль направления 1202a, прикрепляемый блок 20 также обеспечивает силу F в направлении 1504, которое перпендикулярно направлению движения 1202 и параллельно и противоположно наружной поверхности зубов 1304. Например, сила F обеспечивает возможность взаимодействия щетинок на прикрепляемом блоке 20 с зубами 1304 для удаления бляшки, воды, зубной пасты и/или других элементов с зубов 1304 и/или десен 1302 для очистки зубов 1304 и/или десен 1302.
[127] Когда пользователь чистит зубы 1304, к прикрепляемому блоку 20 должна прикладываться минимальная величина боковой силы, так чтобы к зубам 1304 прикладывалась максимальная величина нормальной силы F. Специалисты в данной области техники признают, что, хотя к прикрепляемому блоку 20 прикладывается минимальная величина боковой силы, приложенная нормальная сила F плюс эффекты трения могут создать ненулевую величину боковой силы, подлежащей обнаружению прикрепляемым блоком 20. Как видно на фиг.16E, прикрепляемый блок 20 устройства 10 для гигиены полости рта при движении в направлении 1402 и/или 1454, имеет силу F1, 1602, приложенную к наружной поверхности зубов 1304, так что боковая сила F2, 1604 является как можно меньшей. В одном частном примере величина боковой силы F2 равна нулю. Как более подробно описано ниже, минимизация боковой силы F2 обеспечивает максимальную чистящую эффективность. В некоторых вариантах осуществления помимо определения величины движения прикрепляемого блока 20 (и, таким образом, устройства 10 для гигиены полости рта), акселерометры (например, датчики 32) могут также быть выполнены с возможностью определения угла, под которым прикрепляемый блок 20 взаимодействует с зубами 1304. Например, устройство 10 для гигиены полости рта может включать в себя один или более акселерометров, которые измеряют движение, и один или более акселерометров, которые измеряют величину силы тяжести или ускорение силы тяжести устройства 10 для гигиены полости рта. Устройство 10 для гигиены полости рта и/или пользовательское устройств 150 выполнено с возможностью сравнения направления движения, измеренного одним или более акселерометром, измеряющим движение устройства 10 для гигиены полости рта, с направлением или ориентацией силы тяжести, обнаруженной гравитационным акселерометром(ами) для определения угла между направлением движения и силой тяжести.
[128] Фиг.17 - иллюстративная блок-схема процесса 1700 согласно различным вариантам осуществления. Процесс 1700, в одном варианте осуществления, начинается на этапе 1702. На этапе 1702 информация о движении принимается от одного или более акселерометров, расположенных на или в устройстве 10 для гигиены полости рта. Например, когда пациент чистит зубы, используя устройство 10 для гигиены полости рта, датчик(и) 32, например, один или более акселерометров, расположенных на нем, обнаруживают информацию, соответствующую смещению, скорости, ускорению и/или углу движения устройства 10 для гигиены полости рта. В одном примерном варианте осуществления датчик(и) 32 (например, акселерометр) на устройстве 10 для гигиены полости рта обнаруживает информацию, соответствующую движению устройства 10 для гигиены полости рта, которая передается пользовательскому устройству 150, 700 для обработки и/или анализа. Например, устройство 10 для гигиены полости рта может передавать информацию о движении, обнаруженном датчиками 32 (например, акселерометрами), пользовательскому устройству 150, используя коммуникационную схему 108.
[129] На этапе 1704 информация о движении, принятая на этапе 1702, сравнивается с целевым движением для чистки зубов 1304 с использованием устройства 10 для гигиены полости рта. Например, частота чистящего движения может обнаруживаться датчиком(ами) 32 (например, акселерометрами), расположенными на устройстве 10 для гигиены полости рта, и может сравниваться с заранее заданным значением частоты или частотным диапазоном, соответствующим надлежащей или правильной чистке. В одном варианте осуществления заданное значение частоты хранится в памяти 106 на устройстве 10 для гигиены полости рта или пользовательском устройстве 150. В одном варианте осуществления заданное значение частоты соответствует диапазону частотных значений, связанному с надлежащим или правильным чистящим движением. Например, частотные значения, соответствующие правильному чистящему движению, могут соответствовать 1 5 Гц, однако может использоваться любая подходящая частота или диапазон частот.
[130] На этапе 1706 проводится определение относительно того, что принятая информация о движении находится в пределах предварительно заданного порогового значения для целевого движения. Например, на этапе 1704 движение устройства 10 для гигиены полости рта может сравниваться с целевым движением устройства 10 для гигиены полости рта, соответствующим надлежащей или правильной технике чистки. Если при сравнении определяется, что разность между чистящим движением, обнаруженным акселерометрами, и заданным движением меньше заданного порогового значения, то процесс 1700 продолжается на этапе 1708. Если разность между обнаруженным чистящим движением больше заданного порогового значения, то процесс 1700 продолжается на этапе 1710. Например, если заданное чистящее движение для надлежащей чистки с использованием устройства 10 для гигиены полости рта находится между 1 и 5 Гц, а обнаруженное движение составляет 3 Гц, тогда устройство 10 для гигиены полости рта находится в заданном диапазоне пороговых значений для надлежащей чистки. Если, однако, обнаруженное движение составляет 10 Гц, то чистящее движение устройства 10 для гигиены полости рта не находится в пределах пороговых значений для надлежащей чистки.
[131] В некоторых вариантах осуществления сравнение, которое происходит на этапе 1706, может представлять собой двоичное решение. Например, обнаруженная частота принятого движения устройства 10 для гигиены полости рта может сравниваться с целевым чистящим движением для устройства 10 для гигиены полости рта. Если обнаруженное движение медленнее максимального порогового значения частоты или больше минимального порогового значения частоты, то обнаруженное движение рассматривается как правильное. Однако, если обнаруженное движение больше максимального порогового значения частоты или меньше минимального порогового значения частоты, то обнаруженное движение рассматривается как правильное. В одном варианте осуществления сравнение может представлять собой непрерывное решение, при котором для определения оценки чистящего движения (например, см. ниже) используется положение в частотном диапазоне. Например, диапазон частот для целевого чистящего движения может составлять 1 9 Гц. Если обнаруженная частота составляет 5 Гц, оценка может составлять 50%, при этом если обнаруженная частота составляет 1 Гц или 9 Гц, оценка может составлять, соответственно, 100% или 0%. Однако специалисты в данной области техники признают, что описанные выше техники сравнения являются просто примерами и могут использоваться любые техники сравнения.
[132] Если на этапе 1706 определяется, что принятая информация о движении, в сравнении с заданной информацией о движении, находится в пределах заданного порогового значения, то процесс 1700 продолжается на этапе 1708, на котором предоставляется обратная связь пользователю, оперирующему устройством 10 для гигиены полости рта и/или пользовательским устройством 150. В одном примерном варианте осуществления предоставленная обратная связь представляет собой тактильную обратную связь. Например, предоставленная тактильная обратная связь может представлять собой вибрацию устройства 10 для гигиены полости рта. В другом примере предоставленная тактильная обратная связь может представлять собой слышимый звук или тон, выводимый устройством 10 для гигиены полости рта, или пользовательским устройством 150. В другом примерном варианте осуществления обратная связь, предоставленная пользователю, оперирующему устройством 10 для гигиены полости рта, является визуальной. Например, пользовательский интерфейс, включающий в себя одно или более изображений, может представляться на дисплей 604 пользовательского устройства 150, или устройство 10 для гигиены полости рта. Различные типы обратной связи, представляемые пользователю, оперирующему устройством 10 для гигиены полости рта, могут включать в себя положительную обратную связь, инструкции или информацию, касающуюся чистящего движения устройства 10 для гигиены полости рта, или любой другой тип информации или любое сочетание перечисленного. В качестве иллюстративного примера пользователю может быть представлен пользовательский интерфейс 200, 300, 300' и/или 400.
[133] Если на этапе 1706 определяется, что чистящее движение устройства 10 для гигиены полости рта не находится в пределах заданного порога целевого чистящего движения, процесс 1700 продолжается на этапе 1710, на котором вычисляется разность между принятой информацией о движении, измеренной акселерометрами на устройстве 10 для гигиены полости рта, и целевым чистящим движением, сохраненным в памяти 106 устройства 100 для гигиены полости рта или пользовательского устройства 150. В одном примерном варианте осуществления, как описано ранее, выполняется определение относительно того, является ли принятая информация о движении меньшей или большей, чем заданное пороговое значение частоты. В этом частном случае принятая информация о движении не удовлетворяет заданному пороговому значению частоты, и вычисляется разность между указанной принятой информацией о движении (например, частотой движения) и целевой частотой чистящего движения. Например, принятая информация о движении от акселерометров, расположенных на устройстве 10 для гигиены полости рта, может указывать, что пользователь перемещает устройство 10 для гигиены полости рта с частотой 15 Гц. В частном примере целевая частота чистящего движения может составлять 5 Гц, а пороговое значение частоты для целевого движения может составлять +/- 4 Гц (например, 1 9 Гц). Таким образом, вычисленная разность между движением устройства 10 для гигиены полости рта и целевым чистящим движением для устройства 10 для гигиены полости рта может составлять 10 Гц. Однако, специалисты в данной области техники признают, что информация о движении и целевая чистящая информация о движении, описанная выше, являются просто примерами. Кроме того, специалисты в данной области техники признают, что вычисленная разность между принятой чистящей информацией о движении устройства 10 для гигиены полости рта и целевым чистящим движением может также включать в себя разность между принятой информацией о движении и пороговым значением для целевого чистящего движения. Например, при использовании описанного ранее случая разность между частотой движения устройства 10 для гигиены полости рта и верхним пределом целевой частоты движения может составлять 6 Гц. Это может обеспечивать пользователю возможность приблизительно знать, насколько близко (или насколько далеко) он находится от диапазона надлежащей или правильной техники чистки.
[134] На этапе 1712 предоставляется обратная связь пользователю, оперирующим устройством 10 для гигиены полости рта, которая включает в себя, в одном варианте осуществления, вычисленную разность между принятой информацией о движении и целевым чистящим движением. Например, пользователю может предоставляться тактильная обратная связь в ответ на принятую информацию о том, что движение не находится в пределах заданного порогового значения целевой информации. В одном варианте осуществления предоставленная тактильная обратная связь соответствует вибрации или жужжанию устройства 10 для гигиены полости рта, что может указывать пользователю, что его чистящее движение является неправильным. После появления тактильной обратной связи пользователь может видеть, или на устройстве 10 для гигиены полости рта, или на пользовательском устройстве 150, вычисленную разность между информацией о движении устройства 10 для гигиены полости рта и целевым чистящим движением. Например, дисплей 604 устройства 100 для гигиены полости рта и/или пользовательское устройство 150 может иметь графический пользовательский интерфейс, отображаемый на нем, который включает в себя вычисленную разность между чистящим движением устройства 10 для гигиены полости рта и целевым чистящим движением. В одном варианте осуществления обратная связь, предоставленная пользователю, представляет собой визуальную обратную связь, а тактильная обратная связь не предоставляется. В еще одном варианте осуществления звуковая обратная связь, например, аудиотон, проигрывается через устройство 100 для гигиены полости рта и/или пользовательское устройство 150 в дополнение или вместо тактильной и/или визуальной обратной связи.
[135] Фиг.18 - иллюстративная блок-схема процесса 1800 согласно различным вариантам осуществления. Процесс 1800 начинается на этапе 1802, на котором информация о движении принимается от одного или более акселерометров (например, датчиков 32), расположенных на устройстве 10, 100 для гигиены полости рта. Например, акселерометры, расположенные на устройстве 10 для гигиены полости рта, могут измерять ускорение и/или движение (например, абсолютную величину и/или направление) устройства 10 для гигиены полости рта, когда оно используется для чистки зубов пациента (например, зубов 1304). В одном примерном варианте осуществления этап 1802 процесса 1800 по существу аналогичен этапу 1702 процесса 1700, и применимо предыдущее описание.
[136] На этапе 1804 определяется одна или более осей, которой соответствует принятая информация о движении. Например, акселерометры на устройстве 10 для гигиены полости рта могут представлять собой одноосные или многоосные акселерометры. Если акселерометры на устройстве 10 для гигиены полости рта являются одноосными акселерометрами, процессоры 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150 могут определять, какие акселерометры обнаружили движение. Например, обнаруженное движение может происходить только вдоль акселерометра оси x. В другом примере обнаруженное движение может происходить вдоль и вдоль акселерометра оси x и акселерометра оси z. Это может обеспечивать информацию, касающуюся оси или осей движения для устройства 10 для гигиены полости рта. Если акселерометры на устройстве 10, 100 для гигиены полости рта представляют собой многоосные акселерометры, процессоры 102 устройства 10 для гигиены полости рта и/или пользовательское устройство 150 могут определять, по какой оси или осям происходит движение устройства 10 для гигиены полости рта от многоосных акселерометров.
[137] В качестве иллюстративного примера устройство 10 для гигиены полости рта может включать в себя три одноосных акселерометра, например, акселерометр оси x, оси y и оси z. Процессоры 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150 могут определять, что только акселерометр оси x обнаружил движение, и, таким образом, могут определить, что движение устройства 10 для гигиены полости рта происходит только по оси x. В качестве другого иллюстративного примера процессоры 102 устройства 10 для гигиены полости рта, также включающего в себя три одноосных акселерометра, могут определить, что оба - и акселерометр оси x и акселерометр оси z обнаружили движение. Таким образом, в этом частном случае движение устройства 10 для гигиены полости рта может происходить вдоль участка оси x и оси z. В еще одном примере процессоры 102 устройства 10 для гигиены полости рта могут включать в себя 3 многоосных акселерометра, например, акселерометр осей x-y, акселерометр осей x-z и акселерометр осей y-z. В этом частном случае, акселерометр осей x-y может обнаружить движение, а акселерометры осей x z и y-z не обнаруживают его. Таким образом, процессоры 102 устройства 10 для гигиены полости рта могут определить, что движение устройства для гигиены полости рта происходит по оси x-y. Однако специалисты в данной области техники признают, что вышеприведенное является просто примером, и если движение обнаруживается акселерометром осей x-y, некоторое движение может также обнаруживаться акселерометром оси x-z (компонента оси x) и акселерометром оси y-z (компонента оси y).
[138] На этапе 1806 выполняется определение относительно того, включают ли в себя компоненту силы тяжести ось или оси, которым, как определено, соответствует информация о движении. В одном примерном варианте осуществления сила тяжести может быть соосна оси z. Однако это является просто примером и ось силы тяжести может изменяться в зависимости от конкретного варианта осуществления или применения устройства 10 для гигиены полости рта. Если на этапе 1806 определяется, что ось, которой соответствует информация о движении, включает в себя компоненту силы тяжести, тогда процесс 1800 продолжается на этапе 1808. На этапе 1808 компонент силы тяжести учитывается для этой оси или осей. Например, в вышеприведенном примере с использованием трех одноосных акселерометров, акселерометр оси x и акселерометр оси z, могут оба обнаружить движение. Ось z, как описано ранее, может соответствовать оси силы тяжести, и, таким образом, движение, обнаруженное вдоль оси z, может включать в себя компоненту, связанную с силой тяжести. Таким образом, процессоры 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150 могут учитывать компоненту силы тяжести и изменять выходной сигнал, используемый для анализа от этого акселерометра (например, акселерометра оси z). В одном варианте осуществления выходные сигналы акселерометра, который обнаружил движение вдоль своей оси, соответствующее силе тяжести, могут подавляться. Например, если ось z соответствует силе тяжести, выходной сигнал акселерометра, обнаруживающего движение вдоль оси z, может подавляться или взвешиваться иначе для подавления или минимизации эффектов силы тяжести для движения устройства 10 для гигиены полости рта. В одном варианте осуществления указанные один или более акселерометров, расположенных на устройстве 10 для гигиены полости рта, не соосны с осью силы тяжести. В этом частном случае более чем один акселерометр может обнаруживать компоненту силы тяжести. Таким образом, различные разложения движения устройства 10 для гигиены полости рта на компоненты могут происходить с использованием процессоров 102 для определения направления и абсолютного значения компонента силы тяжести. После определения компонента силы тяжести вдоль каждого акселерометра, компонента силы тяжести учитывается вдоль этого акселерометра, и процесс 1800 продолжается на этапе 1810.
[139] Если, однако, на этапе 1806 определяется, что принятая информация о движении для устройства 10 для гигиены полости рта не включает в себя компоненту силы тяжести, процесс 1800 продолжается на этапе 1810. На этапе 1810 определяется одно или более из: значения частоты, значения амплитуды и значения энергии чистящего движения. Например, процессоры 102 устройства 10 для гигиены полости рта и/или пользовательского устройства 150 могут анализировать информацию о движении, обнаруженном акселерометрами (например, датчиками 32) и определять частоту чистящего движения, с которой устройство 10 для гигиены полости рта чистит зубы 1304. В другом примере информация о движении может анализироваться для обнаружения величины энергии в чистящем движении. В одном варианте осуществления энергия может включать в себя информацию, относящуюся к амплитуде и/или частоте чистящего движения. Однако специалисты в данной области техники признают, что информация о движении может концентрироваться или включать в себя любое количество информации, соответствующей чистящему движению, обнаруженному одним или более акселерометрами на устройстве 10 для гигиены полости рта, и вышеприведенное является только примером.
[140] После определения одного или более из указанной частоты, амплитуды и/или энергии чистящего движения выполняется запрос на этапе 1812 для определения, удовлетворяет ли определенная чистящая частота, амплитуда и/или энергия заданному условию, соответствующему правильному или надлежащему чистящему движению для устройства 10 для гигиены полости рта. Например, пороговое значение частоты, значение амплитуды и/или значение энергии для чистки может устанавливаться пользователем, оперирующим устройством 10 для гигиены полости рта и/или пользователем, оперирующим пользовательским устройством 150. Пороговое значение частоты, амплитуды и/или энергии может представлять собой верхнее или нижнее значение, так что если определенная частота, амплитуда и/или энергия чистки превышает или меньше, соответственно, порогового значения частоты, амплитуды и/или энергии, чистящее движение устройства 10 для гигиены полости рта является неверным, а если определенная частота, амплитуда и/или энергия чистки устройства 10 для гигиены полости рта меньше или больше, соответственно, порогового значения частоты, амплитуды и/или энергии, чистящее движение устройства 10 для гигиены полости рта является правильным.
[141] В качестве иллюстративного примера заранее установленное верхнее пороговое значение частоты чистки может устанавливаться равным 5 Гц. Если частота чистящего движения составляет более 5 Гц, то чистящее движение не является правильным. Однако, если чистящее движение имеет частоту, меньшую или равную 5 Гц, тогда чистящее движение является правильным.
[142] В одном варианте осуществления для правильной чистки используется диапазон, соответствующий нижнему и верхнему пороговому значению частоты, амплитуды и/или энергии. В качестве иллюстративного примера заранее заданный диапазон пороговых значений частоты чистки может составлять 1-9 Гц. Если определенная частота чистящего движения устройства 10 для гигиены полости рта меньше 1 Гц или больше 9 Гц, тогда чистящее движение является неправильным. Однако, если определенная частота чистящего движения устройства 10 для гигиены полости рта больше или равна 1 Гц, но меньше или равна 9 Гц, то чистящее движение является правильным.
[143] Если на этапе 1812 частота, амплитуда и/или энергия чистки удовлетворяют предварительно установленному условию, процесс 1800 продолжается на этапе 1814. Например, если верхний предел для частоты чистки составляет 5 Гц, тогда надлежащая техника чистки соответствует частоте чистки устройства 10 для гигиены полости рта, составляющей меньше 5 Гц или равной 5 Гц. Для случая, когда удовлетворяется предварительно установленное условие, процесс 1800 продолжается на этапе 1814, на котором обратная связь предоставляется пользователю, оперирующему устройством 10 для гигиены полости рта, указывающая, что его чистящее движение является правильным. Например, пользовательский интерфейс, отображенный на устройстве 10 для гигиены полости рта или пользовательском устройстве 150, может указывать пользователю, что он чистит зубы 1304 правильно.
[144] Если, однако, частота, амплитуда и/или энергия чистки, определенная на этапе 1812, не удовлетворяет предварительно заданному условию, процесс 1800 продолжается на этапе 1816. На этапе 1816 обратная связь предоставляется пользователю, оперирующему устройством 10 для гигиены полости рта, которая информирует пользователя, что он чистит зубы неправильно. Например, пользовательский интерфейс может представляться пользователю на устройство 10 для гигиены полости рта или пользовательское устройство 150. В одном варианте осуществления тактильная обратная связь, например, слышимый тон или вибрация устройства 10 для гигиены полости рта, может обеспечиваться в ответ на определение, что частота чистящего движения пользователя является неправильной (например, не удовлетворяет заданному условию для надлежащего чистящего движения). В одном варианте осуществления и тактильная и визуальная обратная связь предоставляется пользователю, оперирующему устройством 10 для гигиены полости рта, однако специалисты в данной области техники признают, что пользователю может обеспечиваться любой дополнительный тип обратной связи, и вышеприведенное является только примером.
[145] Фиг.19 - иллюстративная блок-схема процесса 1900 согласно различным вариантам осуществления. В одном варианте осуществления процесс 1900 начинается на этапе 1902. На этапе 1902 информация о движении для устройства 10 для гигиены полости рта принимается от одного или более акселерометров (например, датчиков 32), расположенных на устройстве 10 для гигиены полости рта. В одном примерном варианте осуществления этап 1902 фиг.19 по существу аналогичен этапу 1702 фиг.17, и применимо предыдущее описание.
[146] На этапе 1904 определяется максимальная частота, амплитуда и/или энергия чистящего движения устройства 10 для гигиены полости рта на основании информации о движении, принятой от акселерометров на этапе 1902. Принятая от акселерометров, расположенных на устройстве 10 для гигиены полости рта, информация о движении включает в себя, помимо другой информации, информацию о частоте, амплитуде и/или энергии, касающуюся чистящего движения устройства 10 для гигиены полости рта. В одном примерном варианте осуществления анализируется амплитуда движения устройства 10 для гигиены полости рта, и определяется максимальная амплитуда чистки. В другом примерном варианте осуществления определяется множество максимальных амплитуд чистки. Например, максимальная амплитуда чистки может определяться каждые 10 секунд или после перемещения пользователем устройства 10 для гигиены полости рта в другое положение в полости рта. В другом примерном варианте осуществления максимальная амплитуда чистки и следующие несколько (например, пять (5)) максимальных амплитуд чистки также определяются на этапе 1904. Например, определяется максимальная амплитуда чистки, и затем определяется следующая максимальная амплитуда (например, амплитуда большая, чем все другие амплитуды, за исключением максимальной амплитуды), и так далее. В еще одном примерном варианте осуществления может анализироваться сигнал энергии чистящего движения, и может быть определен максимальный сигнал энергии. Из максимального сигнала энергии может определяться максимальная частота и/или амплитуда, поскольку сигнал энергии может включать в себя информацию о частоте и/или амплитуде.
[147] В одном варианте осуществления амплитуда сигнала, обнаруженного одним или более акселерометрами, определяется по уравнению 1:
где l представляет собой смещение корпуса 18 прикрепляемого блока 20, и/или приводного вала 23 (в зависимости от измеряемой амплитуды), а f представляет собой частоту движения смещенных объектов. Специалисты в данной области техники признают, что для измерения величины смещения l могут использоваться любые другие участки устройства 10 для гигиены полости рта, и вышеприведенное является просто примером. В качестве иллюстративного примера, если смещение l=0,05 м, а частота f= 2 Гц, тогда амплитуда составляет приблизительно 3,95.
[148] На этапе 1906 выполняется определение относительно того, находится ли максимальная частота, амплитуда и/или энергия чистящего движения в заданном диапазоне пороговых значений для частоты, амплитуды и/или энергии чистки устройства 10 для гигиены полости рта. В одном варианте осуществления заданная максимальная частота, амплитуда и/или энергия для правильного чистящего движения хранится в памяти 106 на устройстве 100 для гигиены полости рта или пользовательском устройстве 150y. Максимальная частота, амплитуда и/или энергия чистки, определенная на этапе 1904, сравнивается с заданной максимальной частотой, амплитудой и/или энергией для правильного чистящего движения для определения, находится ли определенная максимальная частота, амплитуда и/или энергия чистки в диапазоне заданной максимальной частоты, амплитуды и/или энергии чистки. Например, если заданная амплитуда составляет A, диапазон для заданной максимальной амплитуды чистки может составлять A ± 10% от A. В другом примере заданная максимальная амплитуда чистки может быть выше или ниже порогового значения, так что правильное чистящее движение соответствует максимальной амплитуде чистки, которая больше или равна A (если A ниже порогового значения), или меньше или равна A (если A выше порогового значения).
[149] Если на этапе 1906 определяется, что определенная максимальная частота, амплитуда и/или энергия чистки чистящего движения устройства 10 для гигиены полости рта находится в пределах заданного диапазона пороговых значений, тогда процесс 1900 продолжается на этапе 1908. На этапе 1908 пользователю предоставляется обратная связь, указывающая, что чистящее движение является правильным. Например, пользователю может быть представлен пользовательский интерфейс, указывающий, что он чистит правильно. Если, однако, на этапе 1906 определяется, что максимальная частота, амплитуда и/или энергия чистки не находятся в пределах заданного диапазона пороговых значений, тогда процесс 1900 продолжается на этапе 1910. На этапе 1910 обратная связь предоставляется пользователю, оперирующему устройством 10 для гигиены полости рта, указывающая, что чистящее движение является неправильным, и предоставляются инструкции для коррекции чистящего движения. Например, если у пользователя амплитуда чистки значительно меньше заданного порогового значения амплитуды чистки, пользователю может представляться пользовательский интерфейс на устройстве 10 для гигиены полости рта или пользовательском устройстве 150, инструктирующий пользователя чистить с большей амплитудой. В другом примере, если амплитуда чистки пользователя значительно больше заданного порогового значения для максимальной амплитуды чистки, тогда пользователю может быть представлен пользовательский интерфейс на устройстве 10 для гигиены полости рта или пользовательском устройстве 150, инструктирующий пользователя уменьшить амплитуду чистящего движения устройства 10 для гигиены полости рта. В одном примерном варианте осуществления пользователю также предоставляется дополнительная обратная связь, например, тактильная обратная связь и/или аудио обратная связь. Например, если определенная максимальная амплитуда чистки меньше или больше заданного диапазона пороговых значений для максимальной амплитуды чистки, тогда звуковой тон может выводиться пользовательским устройством 150, указывающим пользователю, что его чистящее движение является неправильным. В одном примерном варианте осуществления первый аудиотон выводится, если определенная заданная максимальная амплитуда чистки слишком низкая, а второй аудиотон выводится, если определенная максимальная амплитуда чистки слишком велика.
[150] Фиг.20 - иллюстративная блок-схема процесса 2000 согласно различным вариантам осуществления. В одном варианте осуществления процесс 2000 начинается на этапе 2002. На этапе 2002 информация о движении принимается от одного или более акселерометров (например, датчиков 32), расположенных на устройстве 10, 100 для гигиены полости рта. В одном примерном варианте осуществления этап 2002 фиг.20 по существу аналогичен этапу 1702 фиг.17, и применимо предыдущее описание.
[151] На этапе 2004 принятая информация о движении сравнивается с целевым движением для устройства 10 для гигиены полости рта. В одном варианте осуществления частота, амплитуда и/или энергия, соответствующая правильной технике чистки, сохраняется в памяти 106 на устройстве 10 для гигиены полости рта или пользовательском устройстве 150. Таким образом, правильная техника чистки относится к заданному движению для устройства для гигиены полости рта. Например, заданная частота для целевого чистящего движения устройства 10 для гигиены полости рта для пользователя сохраняется в памяти 106. В другом примере диапазон частот для целевого чистящего движения для чистки зубов пользователя, использующего устройство 10 для гигиены полости рта, сохраняется в памяти 106. Заданная частота, амплитуда и/или энергия, и/или диапазон частот, амплитуд и/или энергий для целевого чистящего движения могут быть запрограммированы в память 106 профессионалом в области стоматологии, родителем или попечителем пользователя, оперирующего устройством 10 для гигиены полости рта, или пользователем устройства 10 для гигиены полости рта.
[152] В качестве иллюстративного примера заданный частотный диапазон для целевого чистящего движения может представлять собой частоту 1-9 Гц. Принятая информация о движении включает в себя, в одном примерном варианте осуществления, частоту устройства 10 для гигиены полости рта для чистки пользователя. Эта частота затем сравнивается, на этапе 2004, с заданным диапазоном частот чистящего движения (например, 1-9 Гц). В одном варианте осуществления сравнение выполняется на устройстве 10 для гигиены полости рта, однако специалисты в данной области техники признают, что сравнение может, вместо этого или дополнительно, выполняться на пользовательском устройстве 150.
[153] На этапе 2006 вычисляется оценка на основании сравнения между принятой чистящей информацией о движении и заданным чистящим движением. Продолжая представленный выше иллюстративный пример, если частота чистящего движения составляет 1 Гц, вычисленная оценка может составлять 100%. Если частота чистящего движения устройства 10, 100 для гигиены полости рта составляет вместо этого 5 Гц, тогда вычисленная оценка может составить 50%. Таким образом, в этом частном случае, частоты, близкие к 1 Гц, оцениваются выше, чем частоты, близкие к 9 Гц.
[154] В одном варианте осуществления оценка вычисляется на устройстве 10 для гигиены полости рта, а в другом варианте осуществления оценка вычисляется на пользовательском устройстве 150. Например, принятая информация о движении (например, частота чистки) и сохраненное целевое чистящее движение могут быть обработаны с использованием процессора(ов) 102 устройства 100 для гигиены полости рта и/или пользовательского устройства 150. Процессор 102 может анализировать информацию о чистящем движении, полученную акселерометрами на устройстве 10 для гигиены полости рта, и сравнивать информацию о чистящем движении с информацией о целевом чистящем движении. Затем процессор 102 может определить разность между двумя движениями. Например, если информация о целевом движении составляет 1-9 Гц, вычисление может определить, находится ли принятая информация о чистящем движении в пределах этого диапазона. Если находится, может создаваться оценка на основании заданных значений частоты для целевого движения. Частота, равная 1 Гц, может, в одном иллюстративном примере, соответствовать по существу отличной оценке (например, 100%), а частота в 5 Гц может соответствовать посредственной оценке (например, 50%). Если информация о целевом движении не находится в указанном диапазоне, вычисленная оценка может отражать, что чистящее движение не находится в диапазоне целевого движения (например, оценка 0%), или оценка может указывать пользователю, что он находится вне диапазона и оценка не может быть вычислена (например, может быть представлен оценка "неприменимо" или "вне целевого диапазона чистящего движения").
[155] На этапе 2008 вычисленная оценка сохраняется в памяти/хранилище 106 данных на устройстве 100 для гигиены полости рта и/или пользовательском устройстве 150. Например, каждый раз, когда пользователь оперирует устройством 10 для гигиены полости рта, вычисленная оценка его чистки может сохраняться. В одном примерном варианте осуществления пользователь может обладать способностью выбирать, какой случай или оценку сохранять. Например, оценка может быть представлена пользователю на этапе 2006 (например, входная/выходная схема 110 устройства 10 для гигиены полости рта или пользовательского устройства 150). В ответ на представление оценки этого сеанса чистки пользователю может быть представлена возможность сохранить эту оценку или не сохранять эту оценку. Если пользователь решает сохранить вычисленную оценку, тогда оценка сохраняется в хранилище данных/память 106. Однако, в одном варианте осуществления эта функция может быть отключена или блокирована, так чтобы некоторые пользователи (например, дети) не имели возможности стереть отрицательные оценки.
[156] На этапе 2010 создаются данные, включающие в себя оценку и любые дополнительные оценки, полученные из дополнительных событий чистки. В одном варианте осуществления созданные данные включает в себя график пользовательских оценок для каждого сеанса чистки в течение времени. Например, график, включающий в себя вычисленную оценку для каждого сеанса чистки, может быть представлен на дисплее пользовательского устройства 150. Это обеспечивает пользователю, родителю или попечителю пользователя и/или профессионалу в области гигиены полости рта, работающему с пользователем, видеть прогресс пользователя. Таким образом пользователь может видеть, улучшается ли его техника чистки (например, становится более соответствующей целевому движению), когда он продолжает использовать устройство 10 для гигиены полости рта, или отклоняется ли он все еще от целевого движения, и как он может изменить технику чистки для более быстрого достижения чистящего движения, сравнимого с целевым чистящим движением. В одном примерном варианте осуществления созданные данные включают в себя оценки различных чистящих сеансов пользователя, и эти данные передаются (например, посредством электронной почты или удаленной платформы хранения) профессионалу в области гигиены полости рта, работающему с пользователем. Это обеспечивает специалисту в области стоматологии, работающему с пользователем, возможность отслеживать технику чистки пользователя между визитами. Кроме того, профессионал в области гигиены полости рта теперь имеет возможность следить за техникой чистящего движения пользователя и последующими визитами, чтобы способствовать улучшению техники чистки пользователя.
[157] В формуле любые ссылочные позиции, помещенные в скобки, не должны истолковываться как ограничивающие формулу. Слово ʺсодержащийʺ или ʺвключающий в себяʺ не исключают наличия элементов или этапов, отличных от перечисленных в пункте формуле. В пункте формулы, относящемуся к устройству, в котором перечисляется нескольких средств, некоторые из этих средств могут быть воплощены в одном и тем же аппаратном элементе. Элемент в единственном числе не исключает наличия множества таких элементов. В пункте формулы, относящемуся к устройству, в котором перечисляется нескольких средств, некоторые из этих средств могут быть воплощены в одном и тем же аппаратном элементе. Тот факт, что некоторые элементы изложены во взаимно различных зависимых пунктах формулы, не означает, что эти элементы не могут быть использованы в сочетании.
[158] Хотя изобретение было подробно описано с целью иллюстрации на основании того, что в настоящее время рассматриваются как наиболее практичные и предпочтительные варианты осуществления, понятно, что такая подробность приведена исключительно с иллюстративной целью, и что изобретение не ограничивается раскрытыми вариантами осуществления, и наоборот, предназначено охватывать модификации и эквивалентные конструкции, находящиеся в рамках смысла и объема приложенной формулы. Например, понятно, что настоящее изобретение предусматривает, что, насколько это возможно, один или более признаков любого варианта осуществления может объединяться с одним или более признаками любого другого варианта осуществления.
Реферат
Группа изобретений относится к медицине, именно к определению правильности использования пользователем устройства для гигиены полости рта. Предложены способ и устройства для его реализации. Способ для определения правильности использования пользователем устройства содержит этапы, на которых принимают информацию о движении устройства для гигиены полости рта от по меньшей мере одного акселерометра, расположенного в устройстве для гигиены полости рта, сравнивают принятую информацию о движении с целевым движением устройства для гигиены полости рта, предоставляют пользователю, оперирующему устройством для гигиены полости рта, обратную связь в ответ на определение, что принятая информация о движении находится в заданном диапазоне пороговых значений целевого движения, предоставляют пользователю, оперирующему устройством для гигиены полости рта, инструкции для изменения движения устройства для гигиены полости рта так, чтобы дополнительная информация о движении, полученная от указанного по меньшей мере одного акселерометра, находилась в заданном диапазоне пороговых значений целевого движения устройства для гигиены полости рта. Устройство для гигиены полости рта, выполненное с возможностью определения качества чистки пользователем, содержит корпус, содержащий блок приводного механизма, прикрепляемый блок, память, по меньшей мере один акселерометр, по меньшей мере один процессор и реализует способ определения правильности использования пользователем устройства. Пользовательское устройство для предоставления информации пользователю, оперирующему устройством для гигиены полости рта, относящейся к качеству его чистящего движения, содержит дисплейный экран, коммуникационную схему, память и по меньшей мере один процессор и реализует способ определения правильности использования пользователем устройства. Группа изобретений обеспечивает повышение эффективности чистящего движения полости рта. 3 н. и 11 з.п. ф-лы, 20 ил.
Комментарии