Электрическая зубная щетка - RU2444325C1
Код документа: RU2444325C1
Чертежи






























Описание
Область техники
Настоящее изобретение относится к электрической зубной щетке.
Уровень техники
Известна электрическая зубная щетка такого типа, который осуществляет очистку (удаление остатков пищи и налета) за счет размещения быстро движущейся щетки на зубах. Для электрической зубной щетки этого типа предложены различные механизмы возбуждения и способы возбуждения с целью повышения мощности удаления налета и повышения эффективности консервативного лечения.
Например, в Патентных документах 1, 2 раскрыта электрическая зубная щетка, способная переключаться между вращательным возвратно-поступательным движением (движением качения) и линейным возвратно-поступательным движением путем переключения направления вращения двигателя.
Кроме того, в Патентном документе 3 раскрыта идея, состоящая в том, что ориентация относительно оси корпуса зубной щетки обнаруживается в четыре стадии или восемь стадий, и очищаемая секция оценивается на основании результата обнаружения. В частности, по окружности внутри корпуса предусмотрена совокупность сегментов, каждый из которых имеет форму сектора. Ориентация корпуса зубной щетки оценивается путем обнаружения сегмента, в котором находится проводящий шарик, на основании изменения электрического сопротивления. Однако трудно уменьшить размер такого механизма и, кроме того, трудно добиться высокой точности обнаружения, поскольку позиция шарика не стабильна вследствие движения зубной щетки. В Патентном документе 3, для каждой секции регистрируется, сколько раз производилась очистка или время очистки, и выводится оценка, надлежащим ли образом произведена очистка.
Патентный документ 1: японская выкладка полезной модели №4-15426
Патентный документ 2: японская патентная выкладка №5-123221
Патентный документ 3: японская патентная выкладка №2005-152217
Сущность изобретения
Проблемы, стоящие перед изобретением
Задачей настоящего изобретения является обеспечение метода для дополнительного повышения мощности удаления налета и эффективности консервативного лечения электрической зубной щетки.
Средство решения проблем
Для решения вышеозначенной задачи, настоящее изобретение предусматривает следующую конфигурацию.
Электрическая зубная щетка, в соответствии с настоящим изобретением, включает в себя: щетку; средство возбуждения для приведения щетки в движение; средство обнаружения ориентации для обнаружения ориентации щетки; средство оценивания секции для оценивания очищаемой секции на основании обнаруженной ориентации; и средство управления для переключения режима работы средства возбуждения согласно оценке очищаемой секции.
Здесь, «очищаемая секция» это секция, которая очищается щеткой (за счет контакта со щеткой) из совокупности секций, заданных путем сегментирования поверхностей зубного ряда в полости рта. Остатки пищи и налет налипают по-разному в зависимости от разновидностей (верхняя челюсть/нижняя челюсть, моляр/резец и т.д.) и участков (внутренняя сторона/наружная сторона, поверхность зуба/окклюзионная поверхность, зубодесневой карман) зубов. Таким образом, эффективные операции очистки, например, как применять щетку, как двигать щетку, и скорость, различны для разных секций. Кроме того, даже для зубов одной разновидности, щетка применяется в противоположных направлениях для левого и правого зубных рядов.
Электрическая зубная щетка согласно настоящему изобретению, таким образом, использует конфигурацию, в которой очищаемая секция автоматически оценивается, и, кроме того, режим работы автоматически переключается в зависимости от оценки очищаемой секции. Соответственно, можно реализовать правильную операцию очистки для каждой очищаемой секции и дополнительно можно ожидать повышения мощности удаления налета и эффективности консервативного лечения.
Предпочтительно, средство возбуждения включает в себя двигатель вращательного действия, и средство управления переключает направление вращения двигателя вращательного действия согласно очищаемой секции.
Соответственно, направление движения щетки (движение волосков щетки) можно изменять согласно очищаемой секции. Например, можно осуществлять управление таким образом, чтобы волоски щетки двигались в направлении, в котором налет выскребается из зубодесневого кармана.
Предпочтительно, средство управления переключает частоту движения щетки согласно очищаемой секции.
Например, можно осуществлять управление таким образом, чтобы частота движения уменьшалась в чувствительной секции (секции, где сильная чистка не является предпочтительной) и частота движения увеличивалась в секции, где желателен сильный очистительный эффект.
Предпочтительно, средство обнаружения ориентации имеет датчик ускорения для обнаружения трехмерной ориентации щетки на основании выходного сигнала датчика ускорения.
Соответственно, ориентацию щетки можно определять с высокой точностью, что позволяет идентифицировать очищаемую секцию с более высокой точностью и более высоким разрешением, чем в традиционных устройствах. Кроме того, компактный датчик ускорения легко помещается в корпус электрической зубной щетки. Можно использовать одноосный датчик ускорения, но предпочтительно использовать многоосный (двухосный, трех- или более осный) датчик ускорения.
Предпочтительно, средство обнаружения ориентации имеет гироскоп для обнаружения трехмерной ориентации щетки на основании выходного сигнала датчика ускорения и выходного сигнала гироскопа.
Выходной сигнал датчика ускорения включает в себя составляющую гравитационного ускорения и составляющую динамического ускорения. Составляющая гравитационного ускорения указывает трехмерную ориентацию щетки, и составляющая динамического ускорения является ненужной составляющей сигнала. Таким образом, трехмерную ориентацию щетки можно вычислять с более высокой точностью, опираясь на выходной сигнал гироскопа и отбрасывая составляющую динамического ускорения.
Предпочтительно, электрическая зубная щетка дополнительно включает в себя средство оценивания угла щетки для оценивания угла щетки, который представляет собой угол щетки относительно оси зуба, на основании обнаруженной ориентации, и средство управления переключает режим работы средства возбуждения согласно оценке очищаемой секции и угла щетки.
Более правильную операцию очистки можно реализовать за счет дополнительного учета угла щетки.
Предпочтительно, электрическая зубная щетка дополнительно включает в себя средство обнаружения нагрузки для обнаружения нагрузки, действующей на щетку, и средство управления запрещает переключение режима работы в отсутствие нагрузки, действующей на щетку.
Например, когда щетка перемещается от правой стороны к левой стороне зубного ряда, ориентация щетки значительно изменяется, поэтому режим работы может часто изменяться в ходе движения. Такое явление не является предпочтительным, поскольку делает управление нестабильным и приводит к ненужному расходованию энергии. Таким образом, согласно настоящему изобретению, вышеозначенное явление при движении щетки можно предотвращать, запрещая переключение режима работы в отсутствие нагрузки, действующей на щетку.
Настоящее изобретение допускает любую возможную комбинацию вышеупомянутых средств и процессов.
Результаты изобретения
Настоящее изобретение обеспечивает дополнительное повышение мощности удаления налета и эффективности консервативного лечения электрической зубной щетки.
Краткое описание чертежей
Фиг. 1 - блок-схема электрической зубной щетки в первом варианте осуществления.
Фиг. 2 - вид в разрезе, демонстрирующий внутреннюю конструкцию электрической зубной щетки в первом варианте осуществления.
Фиг. 3 - вид в перспективе, демонстрирующий внешний вид электрической зубной щетки.
Фиг. 4 - схема сегментации очищаемых секций.
Фиг. 5 - логическая блок-схема основной процедуры автоматического управления режимом работы в первом варианте осуществления.
Фиг. 6 - логическая блок-схема процесса определения ориентации в первом варианте осуществления.
Фиг. 7 - логическая блок-схема процесса вычисления очищаемой секции (верхней челюсти) в первом варианте осуществления.
Фиг. 8 - логическая блок-схема процесса вычисления очищаемой секции (нижней челюсти) в первом варианте осуществления.
Фиг. 9 - логическая блок-схема процесса переключения режима работы в первом варианте осуществления.
Фиг. 10 - диаграмма примеров выходных сигналов датчика ускорения Ax, Ay, Az для каждой очищаемой секции верхней челюсти.
Фиг. 11 - диаграмма примеров выходных сигналов датчика ускорения Ax, Ay, Az для каждой очищаемой секции нижней челюсти.
Фиг. 12 - схема, демонстрирующая направление вращения двигателя и движение щетки.
Фиг. 13 - логическая блок-схема процесса переключения режима работы во втором варианте осуществления.
Фиг. 14 - диаграмма, иллюстрирующая траекторию щетки.
Фиг. 15 - схема, демонстрирующая взаимосвязь между углом щетки и движением щетки.
Фиг. 16 - диаграмма, демонстрирующая изменение формы волны выходного сигнала датчика при изменении угла щетки.
Фиг. 17 - логическая блок-схема основной процедуры автоматического управления режимом работы в третьем варианте осуществления.
Фиг. 18 - логическая блок-схема процесса переключения режима работы в третьем варианте осуществления.
Фиг. 19 - блок-схема электрической зубной щетки в четвертом варианте осуществления.
Фиг. 20 - блок-схема электрической зубной щетки в пятом варианте осуществления.
Фиг. 21 - логическая блок-схема основной процедуры автоматического управления режимом работы в пятом варианте осуществления.
Фиг. 22 - схема, демонстрирующая изменение ориентации корпуса зубной щетки, когда щетка прижимается к зубам.
Фиг. 23 - диаграмма, демонстрирующая изменение формы волны выходного сигнала датчика при изменении ориентации, показанном на фиг. 22.
Фиг. 24 - вид в перспективе щеточного участка электрической зубной щетки в шестом варианте осуществления.
Фиг. 25 - логическая блок-схема процесса вычисления очищаемой секции (верхней челюсти) в шестом варианте осуществления.
Фиг. 26 - логическая блок-схема процесса вычисления очищаемой секции (нижней челюсти) в шестом варианте осуществления.
Фиг. 27 - диаграмма, иллюстрирующая снижение шума выходного сигнала датчика ускорения.
Фиг. 28 - схема, поясняющая определения углов ориентации электрической зубной щетки.
Фиг. 29 - диаграмма, иллюстрирующая управление изменением скорости возбуждения.
Фиг. 30 - вид в перспективе щеточного участка электрической зубной щетки в седьмом варианте осуществления.
Фиг. 31 - схема, демонстрирующая измерение ориентации в восьмом варианте осуществления.
Фиг. 32 - логическая блок-схема процесса обновления информации ориентации в девятом варианте осуществления.
Предпочтительные варианты осуществления
В дальнейшем, соответствующие варианты осуществления настоящего изобретения будут подробно описаны со ссылкой на фигуры в порядке иллюстрации.
(Первый вариант осуществления)
<Конструкция электрической зубной щетки>
Конструкция электрической зубной щетки будет описана со ссылкой на фиг. 1, 2 и 3. На фиг. 1 показана блок-схема электрической зубной щетки в первом варианте осуществления, на фиг. 2 - вид в разрезе, демонстрирующий внутреннюю конструкцию электрической зубной щетки в первом варианте осуществления, и на фиг. 3 - вид в перспективе, демонстрирующий внешний вид электрической зубной щетки.
Электрическая зубная щетка включает в себя корпус 1 электрической зубной щетки (далее именуемый просто «корпус 1»), содержащий двигатель 10 служащий источником возбуждения, и вибрирующий элемент 2, имеющий щетку 210. Корпус 1, в общем случае, имеет цилиндрическую форму и также служит участком рукоятки, который пользователь держит рукой при чистке своих зубов.
Корпус 1 снабжен переключателем S для включения/выключения питания. Внутри корпуса 1 предусмотрены двигатель 10, служащий источником возбуждения, схема возбуждения 12, аккумулятор 13, служащий источником питания 2,4 В, катушка 14 для зарядки и т.п. Для зарядки аккумулятора 13 корпус 1 просто помещается на зарядное устройство 100, в результате чего осуществляется бесконтактная зарядка посредством электромагнитной индукции. Схема возбуждения 12 имеет БО (блок обработки входа/выхода) 120 для выполнения различных операций и управления, память 121 для хранения программ и различных значений настройки, таймер 122 и т.п.
Многоосный датчик ускорения (здесь, с тремя осями x, y, z) 15 дополнительно предусмотрен внутри корпуса 1. Согласно фиг. 3, датчик ускорения 15 обеспечен так, что ось x параллельна чистящей стороне щетки, ось y совпадает с продольным направлением корпуса 1, и ось z вертикальна к чистящей стороне щетки. Другими словами, когда корпус 1 располагается на зарядном устройстве 100, вектор гравитационного ускорения параллелен оси y. Когда чистящая сторона щетки повернута вверх, вектор гравитационного ускорения параллелен оси z. Когда чистящая сторона щетки повернута в бок при горизонтальной ориентации корпуса 1, вектор гравитационного ускорения параллелен оси x. Выходной сигнал датчика ускорения 15 по каждой оси поступает на БО 120 и используется для определения трехмерной ориентации щетки.
В качестве датчика ускорения 15 предпочтительно использовать датчик MEMS пьезорезисторного типа, емкостного типа или теплового типа. Причина в том, что датчик MEMS очень мал и легко помещается внутри корпуса 1. Однако тип датчика ускорения 15 этим не ограничивается, и можно использовать датчик электродинамического типа, тензодатчик или пьезоэлектрический датчик. Хотя на фигурах это конкретно не показано, можно предусмотреть корректирующую схему для коррекции баланса чувствительности датчика между осями, температурных характеристик чувствительности, температурного дрейфа и т.д. Кроме того, можно предусмотреть полосовой фильтр (фильтр низких частот) для удаления составляющих динамического ускорения или шума. Кроме того, шум можно снижать путем сглаживания выходного сигнала датчика ускорения. На фиг. 27 показан пример, в котором высокочастотный шум выходного сигнала снижается путем усреднения данных по интервалу в несколько десятков миллисекунд.
Вибрирующий элемент 2 включает в себя участок ножки 20, прикрепленный к стороне корпуса 1 и щеточную часть 21, присоединенную к этому участку ножки 20. Щетка 210 встроена в конец наконечника щеточной части 21. Щеточная часть 21 является расходным элементом и, таким образом, имеет конфигурацию, позволяющую удалять ее с участка ножки 20 для замены на новую.
Участок ножки 20 выполнен из полимерного материала. Участок ножки 20 установлен на корпусе 1 с прокладкой в виде упругого элемента 202 из эластомера. Участок ножки 20 представляет собой трубчатую деталь, закрытую на конце наконечника (конце со стороны щетки) и имеет подшипник 203 на конце наконечника внутри трубки. Конец наконечника оси 30 эксцентрика, соединенной с осью вращения 11 двигателя 10, вставлен в подшипник 203 участка ножки 20. Эта ось 30 эксцентрика имеет груз 300 вблизи подшипника 203, и центр тяжести оси 30 эксцентрика смещен относительно центра вращения. Заметим, что между концом наконечника оси 30 эксцентрика и подшипником 203 предусмотрен небольшой зазор.
<Принцип возбуждения электрической зубной щетки>
БО 120 подает сигнал возбуждения (например, сигнал широтно-импульсной модуляции) в соответствии с режимом работы на двигатель 10 для вращения оси вращения 11 двигателя 10. Ось 30 эксцентрика также вращается совместно с осью вращения 11, причем ось 30 эксцентрика движется так, что оборачивается вокруг центра вращения вследствие смещения центра тяжести. Таким образом, конец наконечника оси 30 эксцентрика неоднократно сталкивается с внутренней стенкой подшипника 203, заставляя участок ножки 20 и присоединенную к нему щеточную часть 21 вибрировать (двигаться) с высокой скоростью. Другими словами, двигатель 10 действует как средство возбуждения вибрации (движения) щетки, и ось 30 эксцентрика действует как механизм передачи движения (механизм преобразования движения) для преобразования выхода (вращения) двигателя 10 в вибрацию вибрирующего элемента 2.
Пользователь может осуществлять очистку, держа корпус 1 в руке и прикасаясь быстро вибрирующей щеткой 210 к зубам. Заметим, что БО 120 отслеживает продолжительность операции с помощью таймера 122 и автоматически останавливает вибрацию щетки по истечении предписанного времени (например, двух минут).
В электрической зубной щетке в настоящем варианте осуществления, ось 30 эксцентрика, которая является механизмом передачи движения, содержится в вибрирующем элементе 2, и, в частности, груз 300 располагается вблизи щетки 210. Таким образом, можно эффективно колебать часть щетки 210. С другой стороны, поскольку вибрирующий элемент 2 (участок ножки 20) установлен на корпусе 1 с прокладкой в виде упругого элемента 202, вибрация вибрирующего элемента 2 слабо передается в корпус 1. Это позволяет снижать вибрацию корпуса 1 и руки в ходе чистки зубов, тем самым улучшая потребительские качества.
<Работа электрической зубной щетки>
Остатки пищи и налет налипают по-разному в зависимости от разновидностей (верхняя челюсть/нижняя челюсть, моляр/резец и т.д.) и участков (внутренняя сторона/наружная сторона, поверхность зуба/окклюзионная поверхность) зубов. Таким образом, эффективные операции очистки, например, как применять щетку (угол щетки или давление щетки), как двигать щетку, скорость и время чистки, различны для разных секций зубного ряда. Кроме того, даже для зубов одной разновидности, щетка применяется в противоположных направлениях для левого и правого зубных рядов.
Таким образом, электрическая зубная щетка в настоящем варианте осуществления вычисляет очищаемую секцию на основании ориентации щетки, определяемой датчиком ускорения 15, и автоматически переключает режим работы (направление вращения, скорость вращения и т.п.) двигателя 10 в зависимости от очищаемой секции.
В настоящем варианте осуществления, согласно фиг. 4, верхний и нижний зубные ряды разделены на 16 секций: «верхнечелюстная передняя наружная сторона», «верхнечелюстная передняя внутренняя сторона», «верхнечелюстная левая наружная сторона», «верхнечелюстная левая внутренняя сторона», «верхнечелюстная левая окклюзионная поверхность», «верхнечелюстная правая наружная сторона», «верхнечелюстная правая внутренняя сторона», «верхнечелюстная правая окклюзионная поверхность», «нижнечелюстная передняя наружная сторона», «нижнечелюстная передняя внутренняя сторона», «нижнечелюстная левая наружная сторона», «нижнечелюстная левая внутренняя сторона», «нижнечелюстная левая окклюзионная поверхность», «нижнечелюстная правая наружная сторона», «нижнечелюстная правая внутренняя сторона» и «нижнечелюстная правая окклюзионная поверхность». Однако сегментация зубного ряда не ограничивается вышеозначенной сегментацией, и зубной ряд можно разделить более грубо или более детально.
Автоматическое управление режимом работы будет конкретно описано со ссылкой на логические блок-схемы на фиг. 5-9. На фиг. 5 показана логическая блок-схема основной процедуры, и на фиг. 6-9 показаны логические блок-схемы, демонстрирующие детали каждого процесса основной процедуры. Заметим, что описанные ниже процессы представляют собой процессы, выполняемые БО 120 в соответствии с программой, если не указано обратное.
При включении электрической зубной щетки БО 120 определяет ориентацию (наклон) щетки на основании выходного сигнала датчика ускорения 15 (S10). Затем БО 120 вычисляет очищаемую секцию на основании ориентации, определяемой на S10 (S20). Затем БО 120 осуществляет управление для переключения режима работы в соответствии с очищаемой секцией, вычисленной на S20 (S30). Процессы на S10-S30 повторно выполняются с определенными интервалами времени, и режим работы изменяется надлежащим образом каждый раз при изменении очищаемой секции. При выключении питания, или когда продолжительность операции достигает предписанного времени (например, двух минут), или при переключении режима работы вручную, основная процедура на фиг. 5 заканчивается. В дальнейшем будут подробно описаны процессы на S10-S30.
<Определение ориентации>
На фиг. 6 показана логическая блок-схема процесса определения ориентации (S10).
БО 120 получает входные сигналы Ax, Ay, Az по осям x, y, z, соответственно, от датчика ускорения 15 (S100). Ax выражает составляющую ускорения в направлении x. Ay выражает составляющую ускорения в направлении y. Az выражает составляющую ускорения в направлении z. Когда зубная щетка находится в состоянии покоя (когда динамическое ускорение не действует на датчик ускорения 15), составной вектор A их Ax, Ay, Az эквивалентен гравитационному ускорению. Здесь, A=(Ax, Ay, Az) называется вектором ориентации.
Здесь, если модуль вектора ориентации A=(Ax, Ay, Az) больше, чем 1,2 g (g - гравитационное ускорение) (S101; ДА), возвращается ошибка (S102). Причина в том, что включение большой величины составляющей динамического ускорения в выходной сигнал датчика ускорения затрудняет точное определение направления гравитационного ускорения (т.е. трехмерной ориентации щетки). Заметим, что вместо возвращения ошибки, как на этапе S102, процессы на S100 и S101 могут повторяться, пока не будут получены выходные сигналы датчика ускорения Ax, Ay, Az, для которых модуль составного вектора будет 1,2 g или менее. Заметим, что пороговое значение при определении ошибки не ограничивается 1,2 g и может быть любым другим значением.
<Вычисление очищаемой секции>
На фиг. 7 и 8 получены логические блок-схемы процесса оценивания очищаемой секции (S20). На фиг. 10 и 11 показаны диаграммы примеры выходных сигналов датчика ускорения Ax, Ay, Az для каждой очищаемой секции.
Сначала БО 120 определяет, является ли челюсть верхней или нижней, на основании выходного сигнала Az датчика ускорения в направлении z (S700). Это определение основано на представлении о том, что чистящая сторона щетки, в основном, обращена вверх при очистке верхнечелюстного зубного ряда, и что чистящая сторона щетки, в основном, обращена вниз при очистке нижнечелюстного зубного ряда. Если Az>0, определяется, что это нижняя челюсть (S801). Если Az≤0, определяется, что это верхняя челюсть (S701).
(1) В случае верхней челюсти
БО 120 определяет, передний зуб или нет, на основании выходного сигнала Ay датчика ускорения в направлении y (S702). Это определение основано на представлении о том, что корпус 1 зубной щетки ориентирован относительно горизонтально при очистке передних зубов, тогда как корпус 1 зубной щетки принудительно ориентирован наклонно при очистке моляров, поскольку ему мешают губы. Если Ay ≤ пороговому значению a, определяется, что это верхний передний зуб (S703).
Если определено, что это верхний передний зуб, БО 120 определяет, наружная сторона или внутренняя сторона, на основании выходного сигнала Ax датчика ускорения в направлении x (S704). Это определение производится на основании представления о том, что щетка ориентируется в противоположных направлениях между наружной стороной и внутренней стороной. Если Ax>0, определяется, что это «верхнечелюстная передняя наружная сторона» (S705), и если Ax≤0, определяется, что это «верхнечелюстная передняя внутренняя сторона» (S706).
С другой стороны, если на этапе S702 определено, что это не верхний передний зуб, БО 120 определяет, окклюзионная поверхность или нет, на основании выходного сигнала Ax датчика ускорения в направлении x (S707). Это определение производится на основании представления о том, что чистящая сторона щетки, в общем случае, ориентирована горизонтально при очистке окклюзионной поверхности, и что выходной сигнал Ax чрезвычайно мал. Если пороговое значение b > Ax > порогового значения c, то определяется, что это «верхнечелюстная левая окклюзионная поверхность или верхнечелюстная правая окклюзионная поверхность» (S708). Заметим, что в первом варианте осуществления верхнечелюстная левая окклюзионная поверхность и верхнечелюстная правая окклюзионная поверхность специально не различаются друг от друга. Причина в том, что в случае окклюзионной поверхности, нет большой необходимости в изменении операции очистки между левой и правой сторонами.
Если Ax ≥ пороговому значению b или Ax ≤ порогового значения c, БО 120 определяет, наружная сторона или внутренняя сторона, в зависимости от того, Ax больше нуля или нет (S709). Это определение производится на основании представления о том, что щетка ориентируется в противоположных направлениях между наружной стороной и внутренней стороной. Если Ax>0, то определяется, что это «верхнечелюстная правая наружная сторона или верхнечелюстная левая внутренняя сторона» (S710). Если Ax≤0, то определяется, что это «верхнечелюстная левая наружная сторона или верхнечелюстная правая внутренняя сторона» (S711). Заметим, что в первом варианте осуществления верхнечелюстная правая наружная сторона и верхнечелюстная левая внутренняя сторона специально не различаются друг от друга. Причина в том, что нет большой необходимости в изменении операции очистки между этими секциями. Это применимо к верхнечелюстной левой наружной стороне и верхнечелюстной правой внутренней стороне.
(2) В случае нижней челюсти
БО 120 определяет, передний зуб или нет, на основании выходного сигнала Ay датчика ускорения в направлении y (S802). Это определение основано на представлении о том, что корпус 1 зубной щетки ориентирован относительно горизонтально при очистке передних зубов, тогда как корпус 1 зубной щетки принудительно ориентирован наклонно при очистке моляров, поскольку ему мешают губы. Если Ay ≤ порогового значения d, определяется, что это нижний передний зуб (S803).
Если определено, что это нижний передний зуб, то БО 120 определяет, наружная сторона или внутренняя сторона, на основании выходного сигнала Ax датчика ускорения в направлении x (S804). Это определение производится на основании представления о том, что щетка ориентируется в противоположных направлениях между наружной стороной и внутренней стороной. Если Ax<0, определяется, что это «нижнечелюстная передняя наружная сторона» (S805), и если Ax≥0, определяется, что это «нижнечелюстная передняя внутренняя сторона» (S806).
С другой стороны, если на этапе S802 определено, что это не нижний передний зуб, то БО 120 определяет, окклюзионная поверхность или нет, на основании выходного сигнала Ax датчика ускорения в направлении x (S807). Это определение производится на основании представления о том, что чистящая сторона щетки в общем случае, ориентирована горизонтально при очистке окклюзионной поверхности, и что выходной сигнал Ax чрезвычайно мал. Если пороговое значение e > Ax > пороговое значение f, определяется, что это «нижнечелюстная левая окклюзионная поверхность или нижнечелюстная правая окклюзионная поверхность» (S808). Заметим, что в первом варианте осуществления нижнечелюстная левая окклюзионная поверхность и нижнечелюстная правая окклюзионная поверхность специально не различаются друг от друга. Причина в том, что в случае окклюзионной поверхности, нет большой необходимости в изменении операции очистки между левой и правой сторонами.
Если Ax ≥ порогового значения e или Ax ≤ порогового значения f, то БО 120 определяет, наружная сторона или внутренняя сторона, в зависимости от того, Ax больше нуля или нет (S809). Это определение производится на основании представления о том, что щетка ориентируется в противоположных направлениях между наружной стороной и внутренней стороной. Если Ax>0, определяется, что это «нижнечелюстная правая наружная сторона или нижнечелюстная левая внутренняя сторона» (S810). Если Ax≤0, определяется, что это «нижнечелюстная левая наружная сторона или нижнечелюстная правая внутренняя сторона» (S811). Заметим, что в первом варианте осуществления нижнечелюстная правая наружная сторона и нижнечелюстная левая внутренняя сторона специально не различаются друг от друга. Причина в том, что нет большой необходимости в изменении операции очистки между этими частями. Это применимо к нижнечелюстной левой наружной стороне и нижнечелюстной правой внутренней стороне.
Посредством вышеописанных процессов, очищаемая в данный момент секция задается как любая из «верхнечелюстной передней наружной стороны» (S705), «верхнечелюстной передней внутренней стороны» (S706), «верхнечелюстной окклюзионной поверхности» (S708), «верхнечелюстной правой наружной стороны или верхнечелюстной левой внутренней стороны» (S710), «верхнечелюстной левой наружной стороны или верхнечелюстной правой внутренней стороны» (S711), «нижнечелюстной передней наружной стороны» (S805), «нижнечелюстной передней внутренней стороны» (S806), «нижнечелюстной окклюзионной поверхности» (S808), «нижнечелюстной правой наружной стороны или нижнечелюстной левой внутренней стороны» (S810), и «нижнечелюстной левой наружной стороны или нижнечелюстной правой внутренней стороны» (S811).
Заметим, что вышеозначенный алгоритм определения показан только в порядке примера, и любой алгоритм можно применять, при условии, что очищаемую секцию можно задавать на основании выходных сигналов Ax, Ay, Az датчика ускорения. Например, определение можно производить без использования значений Ax, Ay, Az как таковых в качестве переменных определений, но с использованием вторичной переменной, полученной надлежащим объединением Ax, Ay, Az. Вторичную переменную можно, по желанию, задать, например, как Ay/Az, Ax·Ax+Ay·Ay, Ay−Ax. Как вариант, информацию ускорения для каждой оси Ax, Ay, Az можно преобразовывать в угловую информацию (угол ориентации) α, β, γ, как показано на фиг. 28, до определения очищаемой секции. В примере, показанном на фиг. 28, угол оси x относительно направления гравитационного ускорения, угол оси y относительно направления гравитационного ускорения и угол оси z относительно направления гравитационного ускорения определяются как угол поворота α, угол тангажа β и угол рыскания γ соответственно. Пороговые значения для использования при определении можно определять из результатов клинических испытаний и т.п.
<Переключение режима работы>
В электрической зубной щетке, согласно настоящему варианту осуществления, вращательное движение оси эксцентрика используется для генерации вибрации щетки, как описано выше. В случае такого принципа возбуждения, щетка вибрирует по эллиптической траектории в плоскости (в плоскости zx) вертикальной к оси вращения двигателя. Затем, при обращении направления вращения двигателя щетка описывает траекторию, симметричную относительно плоскости yz, поскольку вибрационный механизм зубной щетки симметричен относительно плоскости yz.
На фиг. 12 схематически показано направление вращения двигателя и движение щетки. Когда двигатель вращается вперед, волоски щетки движутся таким образом, чтобы выскребать налет из зубодесневого кармана на нижнечелюстной правой внутренней стороне, но при этом волоски щетки движутся таким образом, чтобы заталкивать налет в зубодесневой карман на нижнечелюстной правой наружной стороне. Таким образом, можно понять, что желательно, чтобы двигатель вращался вперед при очистке нижнечелюстной правой внутренней стороны. С другой стороны, можно понять, что желательно, чтобы двигатель вращался назад, чтобы волоски щетки выскребали налет при очистке нижнечелюстной правой наружной стороны. На основании таких соображений, в настоящем варианте осуществления, направление вращения (прямое вращение/обратное вращение) вращательного двигателя переключается в зависимости от очищаемой секции.
На фиг. 9 показана логическая блок-схема процесса переключения режима работы (S30). БО 120 проверяет, изменилась ли очищаемая секция, путем сравнения очищаемой секции, заданной на S20, с очищаемой секцией в предыдущем процессе (процессе на один такт раньше) (S900). Заметим, что очищаемая секция в предыдущем процессе сохраняется в памяти.
Когда очищаемая секция изменяется (S900; ДА), БО 120 определяет, к какой группе относится очищаемая в данный момент секция, первой группе «нижнечелюстная левая наружная сторона, нижнечелюстная правая внутренняя сторона, верхнечелюстная левая внутренняя сторона, верхнечелюстная правая наружная сторона» или второй группе «нижнечелюстная правая наружная сторона, нижнечелюстная левая внутренняя сторона, верхнечелюстная правая внутренняя сторона, верхнечелюстная левая наружная сторона» (S901). Затем, если к первой группе, то БО 120 задает направление вращения двигателя как прямое вращение (S902). Если ко второй группе, то БО 120 задает направление вращения двигателя как обратное вращение (S903).
Таким образом, направление вращения двигателя управляется таким образом, чтобы обеспечить надлежащее и эффективное движение волосков щетки, подходящее для очищаемой секции, и, таким образом, увеличить мощность удаления налета.
(Второй вариант осуществления)
Теперь опишем электрическую зубную щетку во втором варианте осуществления настоящего изобретения. В первом варианте осуществления направление вращения двигателя управляется в зависимости от очищаемой секции. Во втором варианте осуществления частота (частота движения, конкретно скорость вращения двигателя) щетки регулируется в зависимости от очищаемой секции. Другая конструкция аналогична конструкции первого варианта осуществления и, таким образом, ниже, в основном, будет описана конструкция, относящаяся к настоящему варианту осуществления.
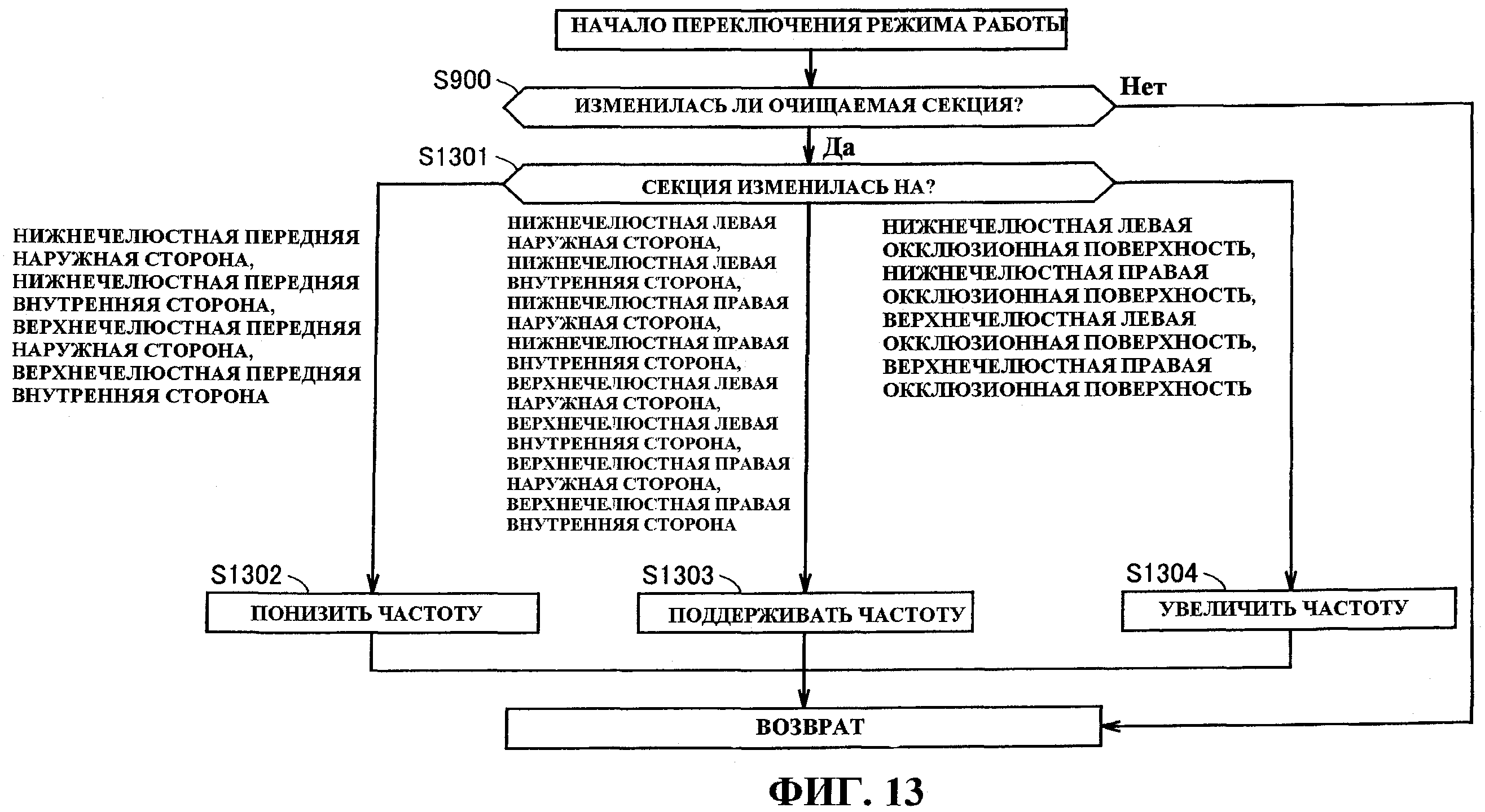
На фиг. 13 показана логическая блок-схема процесса переключения режима работы (S30 на фиг. 5) во втором варианте осуществления. БО 120 проверяет, изменилась ли очищаемая секция, путем сравнения очищаемой секции, заданной на S20, с очищаемой секцией в предыдущем процессе (процессе на один такт раньше) (S900). Заметим, что очищаемая секция в предыдущем процессе сохраняется в памяти.
Если очищаемая секция изменяется (S900; ДА), то БО 120 определяет, к какой группе относится очищаемая в данный момент секция, к первой группе «нижнечелюстная передняя наружная сторона, нижнечелюстная передняя внутренняя сторона, верхнечелюстная передняя наружная сторона, верхнечелюстная передняя внутренняя сторона», второй группе «нижнечелюстная левая наружная сторона, нижнечелюстная левая внутренняя сторона, нижнечелюстная правая наружная сторона, нижнечелюстная правая внутренняя сторона, верхнечелюстная левая наружная сторона, верхнечелюстная левая внутренняя сторона, верхнечелюстная правая наружная сторона, верхнечелюстная правая внутренняя сторона», или третьей группе - «нижнечелюстная левая окклюзионная поверхность, нижнечелюстная правая окклюзионная поверхность, верхнечелюстная левая окклюзионная поверхность, верхнечелюстная правая окклюзионная поверхность» (S1301). Первая группа - это секция, где десны чувствительны и где сильная очистка не является предпочтительной. Третья группа - это секция, где щетка не касается десен и желателен сильный очистительный эффект.
В случае первой группы, БО 120 регулирует скорость вращения двигателя так, чтобы щетка вибрировала на частоте на одну ступень ниже текущего значения настройки (S1302). В случае второй группы, БО 120 регулирует скорость вращения двигателя так, чтобы щетка вибрировала на частоте, равной текущему значению настройки (S1303). В случае третьей группы, БО 120 регулирует скорость вращения двигателя так, чтобы щетка вибрировала на частоте на одну ступень выше текущего значения настройки (S1304). Например, в зубной щетке, где предусмотрено пятиступенчатое переключение частоты, когда текущее значение настройки равно «3», очистка первой группы осуществляется на частоте «2», очистка второй группы осуществляется на частоте «3», и очистка третьей группы осуществляется на частоте «4».
Соответственно, интенсивность очистки можно задавать низкой для секции, где десны чувствительны. Напротив, интенсивность чистки можно задавать высокой для секции, где желателен сильный очистительный эффект. Таким образом, можно повысить эффект и эффективность чистки консервативного лечения.
Хотя в настоящем варианте осуществления частота щетки регулируется с учетом воздействия на десны для каждой очищаемой секции, частоту щетки можно регулировать с какой-либо другой целью. Например, с учетом того, что площади контакта между щеткой и зубами отличаются для разных очищаемых секций, регулировку можно осуществлять таким образом, чтобы очистительный эффект усиливался за счет увеличения частоты для секции, имеющей большую поверхность контакта (например, верхнечелюстной передней наружной стороны, окклюзионной поверхности и т.п.), в то же время, снижая частоту для секции, имеющей малую поверхность контакта (например, нижнечелюстной левой внутренней стороны, верхнечелюстной правой наружной стороны и т.п.). Хотя в настоящем варианте осуществления частота имеет трехступенчатую регулировку, можно предусмотреть двухступенчатую регулировку частоты или четырех или более ступенчатую регулировку частоты.
Когда скорость возбуждения (частота или скорость вращения) щетки изменяется, скорость возбуждения может быстро изменяться, как показано на верхнем графике фиг. 29. Однако резкое изменение или частые изменения скорости возбуждения в ходе чистки может создавать неприятные ощущения у пользователя или может приводить к дестабилизации управления. Затем, как показано на нижнем графике на фиг. 29, также предпочтительно осуществлять такое управление, при котором скорость возбуждения изменяется постепенно (или ступенчато). Например, скорость вращения двигателя можно регулировать таким образом, чтобы темп изменения скорости не достигал определенного значения настройки или не превышал ее.
(Третий вариант осуществления)
Теперь опишем электрическую зубную щетку в третьем варианте осуществления настоящего изобретения. В настоящем варианте осуществления БО 120 вычисляет угол щетки на основании ориентации щетки и переключает режим работы в соответствии с очищаемой секцией и углом щетки. Другая конструкция аналогична конструкции вышеизложенных вариантов осуществления и, таким образом, ниже будет, в основном, описана конструкция, отвечающая настоящему варианту осуществления.
<Характеристики вибрации>
В этой электрической зубной щетке вращательное движение оси эксцентрика используется для генерации вибрации щетки. Щетка вибрирует по эллиптической траектории в плоскости, вертикальной к оси вращения двигателя. Авторы настоящего изобретения наблюдали и анализировали вибрацию щетки с различными частотами (скоростями вращения двигателя) и обнаружили, что эта электрическая зубная щетка имеет следующие характеристики вибрации.
(1) Щеточный участок имеет, по меньшей мере, две точки резонанса (резонансные частоты).
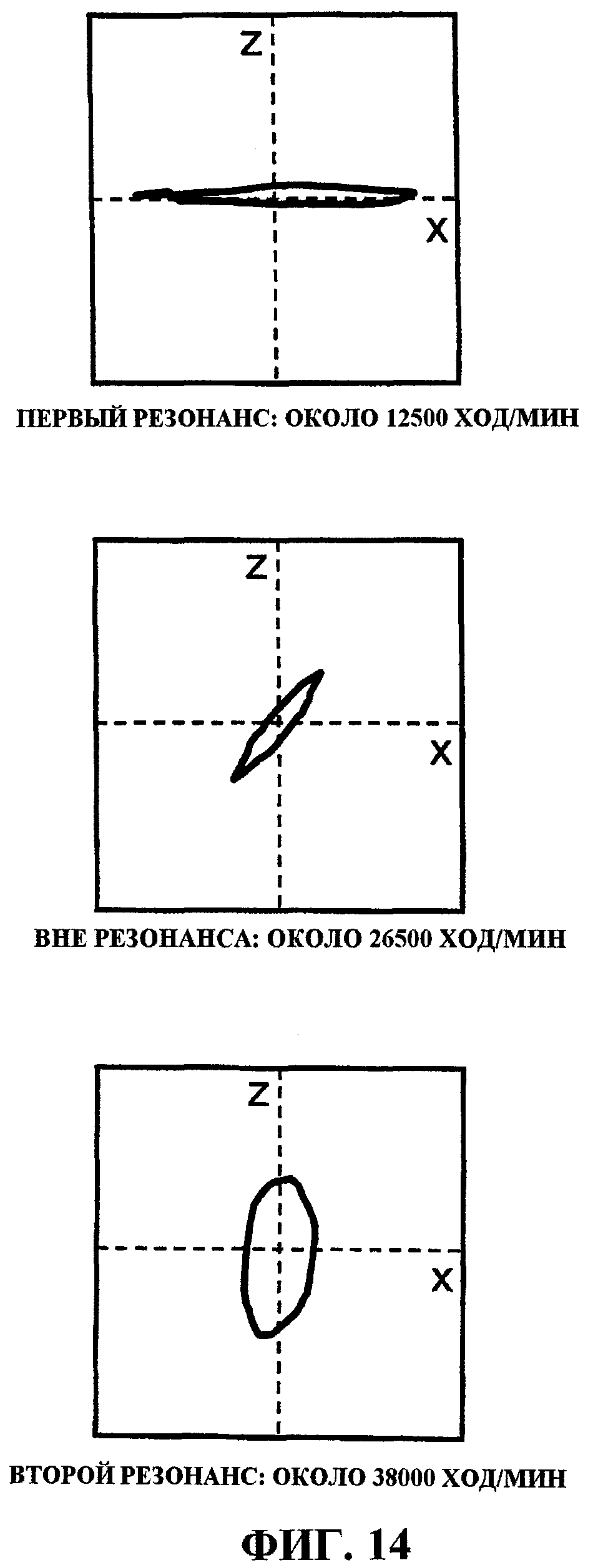
(2) Направления резонанса в разных точках резонанса различны. В частности, как показано на фиг. 14, в точке резонанса (первый резонанс: около 12500 ход/мин) на низкочастотной стороне амплитуда в направлении оси x, параллельной чистящей стороне щетки, увеличивается. В точке резонанса (второй резонанс: около 38000 ход/мин) на высокочастотной стороне, амплитуда в направлении оси z, вертикальной к чистящей стороне щетки, увеличивается. Вне резонанса (например, около 26500 ход/мин) щетка описывает траекторию под наклоном (около 45 градусов) к оси x (оси z). Здесь, «ход/мин» - это единица, представляющая число ходов в минуту.
Причина, по которой возникает совокупность резонансов, отличающихся направлением, может состоять в том, что они сильно зависят от конструкции электрической зубной щетки или принципа их возбуждения. Авторы настоящего изобретения повторили эксперименты с различными осями эксцентрика и конструкциями щетки и обнаружили, что первая точка резонанса отличается тем, что, в основном, зависит от механизма передачи движения, и что вторая точка резонанса отличается тем, что, в основном, зависит от щетки. Другими словами, было обнаружено, что частоту и амплитуду первой точки резонанса можно регулировать путем изменения конструкции и формы механизма передачи движения (просто позиции, размера, веса и т.д. груза оси эксцентрика), и что частоту и амплитуду второй точки резонанса можно регулировать путем изменения конструкции и формы щетки.
<Угол щетки>
Угол щетки - это угол установки щетки относительно оси зуба (оси вдоль коронки и корня зуба). Верхние фигуры на фиг. 15 демонстрируют состояния угла щетки = 45 градусов и нижние фигуры на фиг. 15 демонстрируют состояния угла щетки = 90 градусов. Левые фигуры на фиг. 15 демонстрируют состояния, в которых двигатель вращается вперед, и правые фигуры демонстрируют состояния, в которых двигатель вращается назад. Затем, каждая стрелка показывает движение щетки (направление, в котором амплитуда максимальна). В общем случае, щетка движется поперечно (в направлении оси x) в первом резонансе, щетка движется продольно (в направлении оси z) во втором резонансе, и щетка движется наклонно вне резонанса.
Для эффективного выскребания остатков пищи и налета из зубодесневого кармана или между зубами, желательно двигать щетку так, чтобы волоски щетки попадали в зубодесневой карман или между зубами. Другими словами, предпочтительно, чтобы направление, в котором движется щетка, было наклонным (например, 45 градусов) к оси зуба. Таким образом, в примере, показанном на фиг. 15, можно понять, что в случае угла щетки 45 градусов, движение второго резонанса наиболее пригодно. С другой стороны, можно понять, что в случае угла щетки 90 градусов, движение вне резонанса при прямом вращении двигателя наиболее подходит на нижнечелюстной правой внутренней стороне и движение вне резонанса при обратном вращении двигателя наиболее подходит на нижнечелюстной правой наружной стороне. Заметим, что на основании аналогичной концепции, оптимальный режим работы (направление вращения двигателя и частоту щетки) можно определять для каждой комбинации очищаемой секции и угла щетки.
<Вычисление угла щетки>
Угол щетки можно вычислить, например, из составляющей ускорения Az в направлении z. Согласно фиг. 16, когда угол щетки равен около 90 градусов, Az почти равно нулю. Чем меньше угол щетки, тем больше значение Az. Таким образом, значение Az значительно изменяется согласно углу щетки. Составляющая ускорения Ax в направлении x также изменяется согласно углу щетки, и, таким образом, также предпочтительно оценивать угол щетки из Ax вместо Az или оценивать угол щетки из Ax и Az (направления составного вектора Ax и Az). Хотя угол щетки можно вычислять на основании непрерывной величины, точности на таком уровне составляет «около 45 градусов или около 90 градусов» достаточно для переключения режима работы в настоящем варианте осуществления. Таким образом, угол щетки определяется в простом процессе сравнения между Az и пороговым значением в процессе, как описано ниже.
На фиг. 17 показана логическая блок-схема основной процедуры в третьем варианте осуществления. Он отличается от первого варианта осуществления добавлением вычисления угла щетки процесс (S25). На этапе S25, БО 120 полагает угол щетки равным 90 градусов, если абсолютное значение Az, полученное на S10, меньше заранее определенного порогового значения (если близко к нулю), и полагает угол щетки равным 45 градусов, если абсолютное значение Az больше или равно пороговому значению. Эта функция БО 120 соответствует средству вычисления угла щетки согласно настоящему изобретению.
<Процесс переключения режима работы>
На фиг. 18 показана логическая блок-схема процесса переключения режима работы (S30 на фиг. 17).
БО 120 проверяет, изменяется ли очищаемая секция или угол щетки, путем сравнения очищаемой секции, заданной на S20, и угла щетки, заданного на S25, с очищаемой секцией и углом щетки в предыдущем процессе (S1800). Заметим, что очищаемая секция и угол щетки в предыдущем процессе сохраняются в памяти.
Если очищаемая секция или угол щетки изменяется (S1800; ДА), то БО 120 определяет, к какой группе относится очищаемая в данный момент секция, первой группе - «нижнечелюстная левая наружная сторона, нижнечелюстная правая внутренняя сторона, верхнечелюстная левая внутренняя сторона, верхнечелюстная правая наружная сторона» или второй группе - «нижнечелюстная правая наружная сторона, нижнечелюстная левая внутренняя сторона, верхнечелюстная правая внутренняя сторона, верхнечелюстная левая наружная сторона» (S1801). Если к первой группе, то БО 120 задает направление вращения двигателя как прямое вращение (S1802). Если ко второй группе, то БО 120 задает направление вращения двигателя как обратное вращение (S1803). Кроме того, БО 12 переводит частоту щетки на второй резонанс (высокую скорость), если угол щетки равен 45 градусов (S1804, S1805), и переводит частоту щетки за пределы резонанса (среднюю скорость), если угол щетки равен 90 градусов (S1806).
Согласно вышеописанному управлению в настоящем варианте осуществления, движение волосков щетки, которое наиболее подходит для чистки между зубами или в зубодесневом кармане, можно реализовать на основании очищаемой секции и угла щетки, что дополнительно повышает мощность удаления налета. В этом случае, более эффективно использовать ультразвуковой вибрационный элемент в комбинации для уничтожения периодонтальных бактерий в зубодесневом кармане. Хотя угол щетки оценивается на двух ступенях 45 градусов и 90 градусов, угол щетки можно вычислять на трех или более этапах или в виде непрерывной величины, и частоту щетки также можно изменять на трех или более этапах или непрерывно, соответственно.
(Четвертый вариант осуществления)
На фиг. 19 показана блок-схема электрической зубной щетки в четвертом варианте осуществления. Электрическая зубная щетка в настоящем варианте осуществления включает в себя многоосный (здесь, трехосный) гироскоп 16 внутри корпуса 1.
Гироскоп 16 установлен так, чтобы иметь возможность обнаруживать угловую скорость вокруг оси z, угловую скорость вокруг оси x и угловая скорость вокруг оси y. В качестве гироскопа 16 можно использовать вибрационный, оптический, механический гироскоп или гироскоп любого другого типа. Однако предпочтительно использовать датчик MEMS, поскольку он компактен и легко помещается в корпус 1. Скоростной гироскоп с интегратором или ориентационный гироскоп, который выводит угол, можно использовать вместо скоростного гироскопа, который выводит угловую скорость. Кроме того, выходной сигнал гироскопа можно подвергать полосовой фильтрации для удаления шума (например, частотной составляющей от около 100 Гц до около 300 Гц, которая является частотой возбуждения щетки), обусловленного вибрацией щетки.
Когда корпус 1 зубной щетки находится в состоянии покоя (например, щетка постоянно приложена к одной очищаемой секции), по существу, только составляющая гравитационного ускорения входит в выходной сигнал датчика ускорения 15. В этом случае, трехмерную ориентацию щетки можно обнаружить точно, что позволяет с высокой точностью оценивать очищаемую секцию и угол щетки. Однако, когда корпус 1 зубной щетки находится в состоянии движения (например, когда щетка перемещается от одной очищаемой секции к другой очищаемой секции), не только составляющая гравитационного ускорения, но и составляющая динамического ускорения могут входить в выходной сигнал датчика ускорения 15. Составляющая динамического ускорения является ненужной составляющей сигнала (шумом) при вычислении трехмерной ориентации. С другой стороны, выходной сигнал гироскопа 16 не наблюдается, когда корпус 1 зубной щетки находится в состоянии покоя, и значительный сигнал выводится только, когда корпус зубной щетки 1 движется. Используя такое различие в характеристиках датчика, в настоящем варианте осуществления, трехмерная ориентация зубной щетки определяется на основании выходных сигналов датчика ускорения 15 и гироскопа 16.
В частности, в процессе определения ориентации (S10 на фиг. 5), БО 120 сначала получает выходной сигнал датчика ускорения 15 и выходной сигнал гироскопа 16. Когда абсолютное значение выходного сигнала гироскопа 16 меньше заранее определенного порогового значения, БО 120 полагает, что корпус 1 зубной щетки неподвижен и находит трехмерную ориентацию из выходных сигналов Ax, Ay, Az датчика ускорения 15. Когда абсолютное значение выходного сигнала гироскопа 16 по любой из осей больше или равно заранее определенному пороговому значению, БО 120 вычисляет составляющую динамического ускорения в каждом направлении x, y, z из выходного сигнала гироскопа 16 и корректирует значения Ax, Ay, Az. Соответственно, составляющие динамического ускорения, входящие в Ax, Ay, Az, устраняются, что позволяет с высокой точностью вычислять трехмерную ориентацию щетки.
Заметим, что при получении выходного сигнала гироскопа можно не осуществлять определение ориентации щетки, вместо того, чтобы корректировать выходной сигнал датчика ускорения с использованием выходного сигнала гироскопа. Другими словами, такие процессы, как определения ориентации, вычисления очищаемой секции, вычисление угла щетки и переключение режима работы, осуществляются только, когда выходной сигнал гироскопа меньше заранее определенного порогового значения. Соответственно, переключение режима работы выполняется только, когда ориентация, оцененная из выходного сигнала датчика ускорения, имеет некоторую степень надежности.
Кроме того, текущий вектор ориентации A = (Ax, Ay, Az) можно вычислять путем вычисления величины углового изменения Δθyz вокруг оси x, величины углового изменения Δθzx вокруг оси y и величины углового изменения Δθxy вокруг оси z из выходного сигнала гироскопа и путем поворота вектора ориентации A' = (Ax', Ay', Az'), полученного в процессе определения ориентации на один такт раньше, на угол (Δθyz, Δθzx, Δθxy). Как вариант, ориентацию электрической зубной щетки можно вычислять и оценивать на основании информации угла (см. фиг. 28) для угла поворота α, угла тангажа β и угла рыскания γ, вместо информации ускорения Ax, Ay, Az.
Согласно конфигурации вышеописанного настоящего варианта осуществления, трехмерную ориентацию электрической зубной щетки можно находить с более высокой точностью путем объединения выходных сигналов датчика ускорения и гироскопа (включая выбор одного из выходных сигналов датчика ускорения и гироскопа согласно условиям). В случае электрической зубной щетки, использующей метод Басса с частыми поперечными движениями, информацию ориентации можно получать с высокой точностью даже с комбинацией датчика ускорения и полосового фильтра. Однако, в случае метода качения, согласно которому происходит трехмерное качение корпуса зубной щетки, фактор ошибки велик только при использовании информации ускорения, и точность обнаружения ориентации может снижаться. В таком случае, согласно настоящему варианту осуществления, эффективен метод использования информации угловой скорости гироскопа.
(Пятый вариант осуществления)
На фиг. 20 показана блок-схема электрической зубной щетки в пятом варианте осуществления. Электрическая зубная щетка в настоящем варианте осуществления включает в себя датчик нагрузки (средство определения нагрузки) 17 для определения нагрузки, действующей на щетку. В качестве датчика нагрузки 17 можно использовать тензодатчик, динамометрический датчик, датчик давления или датчик любого другого типа. Однако предпочтительно использовать датчик MEMS, поскольку он компактен и легко помещается в корпус 1.
На фиг. 21 показана логическая блок-схема основной процедуры в пятом варианте осуществления. Она отличается от первого варианта осуществления добавлением процесса определения нагрузки (S5).
На этапе S5 БО 120 определяет, действует ли нагрузка на щетку, на основании информации нагрузки, полученной от датчика нагрузки 17. Можно считать, что «нагрузка действует на щетку», например, когда значение выходного сигнала датчика нагрузки 17 превышает заранее определенное пороговое значение. Процессы после следующего этапа ожидают, пока нагрузка не действует на щетку (S5; НЕТ). Соответственно, в отсутствие нагрузки, действующей на щетку, такие процессы, как определение ориентации, вычисление очищаемой секции, вычисление угла щетки и переключение режима работы запрещены.
Например, когда щетка перемещается от правой стороны к левой стороне зубного ряда, ориентация щетки значительно изменяется, поэтому режим работы может часто изменяться в ходе движения. Такое явление не является предпочтительным, поскольку делает управление нестабильным и приводит к ненужному расходованию энергии. Затем, согласно настоящему варианту осуществления, отслеживая нагрузку, действующую на щетку, и запрещая, по мере необходимости, такие процессы, как определение ориентации и переключение режима работы, можно предотвратить вышеозначенное явление в ходе движения щетки.
Заметим, что информацию нагрузки можно использовать при управлении режимом работы. Например, когда нагрузка, действующая на щетку, изменяется, характеристики вибрации щетки и точки резонанса изменяются, из-за чего первый резонанс и второй резонанс, описанные в третьем варианте осуществления, могут проявляться не в полной мере. Затем, регулируя надлежащим образом частоту щетки (скорость вращения двигателя) согласно нагрузке, действующей на щетку, можно компенсировать сдвиг точки резонанса и можно точно воспроизводить явление резонанса. Соответствие между величинами нагрузки и точками резонанса можно найти экспериментальным путем.
Хотя здесь используется датчик нагрузки 17, нагрузку можно обнаруживать другими средствами. Например, при увеличении нагрузки, действующей на щетку, увеличивается нагрузка двигателя, и увеличивается значение тока, текущего в двигателе. Таким образом, значение тока, текущего в двигателе, отслеживается, и нагрузку, действующую на щетку, можно оценивать из значения тока.
Как вариант, действует ли нагрузка на щетку также можно определить путем мониторинга выходного сигнала датчика ускорения 15. Согласно фиг. 22, когда пользователь держит корпус 1 зубной щетки и прижимает волоски щетки к зубам, упругий элемент между корпусом 1 зубной щетки и вибрирующим элементом 2 деформируется, и ориентация корпуса 1 зубной щетки немного изменяется. Это изменение ориентации можно наблюдать как изменение формы волны выходного сигнала датчика ускорения, например, как показано на фиг. 23. Другими словами, в момент, когда ориентация изменяется, уровень, по меньшей мере, одного выходного сигнала датчика немного смещается, и смещенный уровень поддерживается, пока щетка прижата к зубам. Действует ли нагрузка на щетку, можно определять, регистрируя такое изменение формы волны. Конечно, таким способом трудно оценивать нагрузку с высокой точностью, но он достаточно практичен для определения, на таком уровне, как «действует ли нагрузка», как на S5 в пятом варианте осуществления. Использование датчика ускорения 15 в качестве средства обнаружения нагрузки, как описано выше, предпочтительно тем, что количество компонентов сокращается, что позволяет добиться уменьшения размеров и снижения стоимости зубной щетки.
(Шестой вариант осуществления)
На фиг. 24 показан щеточный участок электрической зубной щетки в шестом варианте осуществления. Электрическая зубная щетка в настоящем варианте осуществления включает в себя датчик температуры 18 для определения температуры щеточного участка. Датчик температуры 18 установлен на задней стороне щетки. В качестве датчика температуры 18 можно использовать инфракрасный датчик, термистор или датчик любого другого типа.
На фиг. 25 и фиг. 26 показаны логические блок-схемы процесса вычисления очищаемой секции (S20). Он отличается от процесса оценивания очищаемой секции (фиг. 7, 8) в первом варианте осуществления тем, что наружная сторона и внутренняя сторона различаются одна от другой на основании выходного сигнала датчика температуры 18.
Процесс для верхней челюсти на фиг. 25 сужает выбор до «верхнечелюстной левой наружной стороны или верхнечелюстной правой внутренней стороны» на основании выходного сигнала датчика ускорения 15 (S710), после чего БО 120 определяет, попадает ли выходное значение датчика температуры 18 в заранее определенный диапазон (S2500). Если щетка располагается с наружной стороны, датчик температуры 18 контактирует с внутренней стороной щеки или находится вблизи нее, и, таким образом, полученное значение выходного сигнала близко к температуре человеческого тела. Напротив, когда щетка располагается с внутренней стороны, датчик температуры 18 открыт внешнему воздуху, и, таким образом, полученное значение выходного сигнала ниже температуры человеческого тела. Таким образом, БО 120 определяет, что это «верхнечелюстная правая наружная сторона», если выходное значение датчика температуры 18 находится в диапазоне от 36 градусов до 38 градусов Цельсия (S2501), и, в противном случае, определяет, что это «верхнечелюстная левая внутренняя сторона» (S2502). Аналогично, «верхнечелюстную левую наружную сторону» и «верхнечелюстную правую внутреннюю сторону» можно отличать друг от друга на основании выходного значения датчика температуры 18 (S2503-S2505). В процессе для нижней челюсти, можно проводить различие между «нижнечелюстной левой внутренней стороной» и «нижнечелюстной правой наружной стороной» (S2600-S2602), а также между «нижнечелюстной правой внутренней стороной» и «нижнечелюстной левой наружной стороной» (S2603-S2605), аналогично, на основании выходного сигнала датчика температуры 18.
Как описано выше, в настоящем варианте осуществления, очищаемые секции можно различать более детально, чем в первом варианте осуществления, что позволяет реализовать более гибкое управление режимом работы.
(Седьмой вариант осуществления)
На фиг. 30 показан щеточный участок электрической зубной щетки в седьмом варианте осуществления. В шестом варианте осуществления информация температуры, полученная датчиком температуры 18, используется для идентификации очищаемой секции (различения между наружной стороной и внутренней стороной). В настоящем седьмом варианте осуществления используется информация изображения.
Согласно фиг. 30, камера 19 предусмотрена на конце наконечника в направлении оси y головки щетки. В качестве камеры 19 можно использовать камеру видимого света, инфракрасную камеру или любую другую камеру, позволяющую получать информацию изображений в полости рта. Инфракрасная камера служит для мониторинга теплового излучения (так называемой термографии). Инфракрасная камера предпочтительнее, чем камера видимого света, поскольку полость рта может быть темной в ходе очистки. В настоящем варианте осуществления разрешение камеры может не быть столь высоким, при условии, что профиль небного язычка известен, как описано ниже.
Аналогично шестому варианту осуществления, БО 120 сужает выбор до «верхнечелюстной левой наружной стороны или верхнечелюстной правой внутренней стороны» на основании выходного сигнала датчика ускорения 15 (см. S710 на фиг. 25). Затем БО 120 получает изображение от камеры 19 и определяет небный язычок на изображении. При определении небного язычка можно использовать общеизвестные методы анализа изображения. Например, профиль небного язычка можно обнаружить методом выделения контуров или преобразования Хафа, или небный язычок можно определить методом сопоставления с образцом. Когда щетка располагается с внутренней стороны, конец наконечника головки щетки обращен к глотке, и, таким образом, высока вероятность того, что небный язычок попадет в изображение. С другой стороны, когда щетка располагается с наружной стороны, небный язычок не попадает в изображение. Таким образом, БО 120 определяет, что это «верхнечелюстная правая внутренняя сторона», если небный язычок можно обнаружить, и определяет, что это «верхнечелюстная левая наружная сторона», если небный язычок нельзя обнаружить. Аналогичным образом, можно проводить различие между «верхнечелюстной левой наружной стороной» и «верхнечелюстной правой внутренней стороной», между «нижнечелюстной левой внутренней стороной» и «нижнечелюстной правой наружной стороной» и между «нижнечелюстной правой внутренней стороной» и «нижнечелюстной левой наружной стороной».
Как описано выше, в настоящем варианте осуществления, очищаемые секции можно различать более детально, чем в первом варианте осуществления, что позволяет реализовать более гибкое управление режимом работы.
Хотя в настоящем варианте осуществления информация изображения используется только для различения между наружной стороной и внутренней стороной, информацию изображения также можно использовать для различения между верхней челюстью и нижней челюстью, различения между передней стороной, правой стороной и левой стороной и т.п. Кроме того, также предпочтительно идентифицировать все очищаемые секции на основании информации изображения. Однако полость рта узка, и трудно знать полное позиционное отношение. Таким образом, информацию ориентации, полученную датчиком ускорения (датчиком ускорения и гироскопом), желательно использовать совместно вместо того, чтобы использовать только информацию изображения для идентификации всех очищаемых секций. Хотя небный язычок обнаруживается в настоящем варианте осуществления, любые другие части в полости рта (например, язык, глотку, зубы, десны и т.д.) можно распознавать для определения позиции и ориентации щетки. Например, можно определить, что щетка располагается с внутренней стороны, если язык или глотка попадает в изображение.
На щеточном участке также предпочтительно иметь оптический датчик вместо камеры. Наружную сторону и внутреннюю сторону можно отличать друг от друга, анализируя выходной сигнал оптического датчика, поскольку с наружной стороны темно, с внутренней стороны обнаруживается свет.
(Восьмой вариант осуществления)
Восьмой вариант осуществления использует конфигурацию, в которой обнаружение ориентации и идентификация очищаемой секции осуществляются с помощью одноосного датчика ускорения.
На верхней фигуре фиг. 31 показано состояние, в котором очищается поверхность зуба с наружной стороны или с внутренней стороны. Здесь, угол щетки (угол рыскания γ) равен около 90 градусов, составляющая гравитационного ускорения в направлении оси x равна около 1 g или −1 g (положительный или отрицательный знак соответствует левому или правому зубному ряду), и составляющая гравитационного ускорения в направлении оси z почти равна нулю. С другой стороны, на нижней фигуре фиг. 31 показано состояние, в котором очищается окклюзионная поверхность. Здесь, угол щетки (угол рыскания γ) почти равен 0 градусов, составляющая гравитационного ускорения в направлении оси x почти равна нулю, и составляющая гравитационного ускорения в направлении оси z равна около 1 g или −1 g (положительный или отрицательный знак соответствует верхнему или нижнему зубному ряду).
Такие характеристики можно использовать для различения между «поверхностью зуба с наружной стороны или внутренней стороны» и «окклюзионной поверхностью» и для дополнительного различения между левой, правой, верхней и нижней сторонами только с помощью датчика ускорения по оси x или датчика ускорения по оси z. Что касается управления режимом работы, например, скорость возбуждения щетки можно уменьшать, чтобы не стимулировать десны при очистке «поверхности зуба с наружной стороны или внутренней стороны», и скорость возбуждения щетки можно увеличивать при очистке «окклюзионной поверхности».
(Девятый вариант осуществления)
Девятый вариант осуществления предусматривает метод вычисления очищаемой секции и угла щетки, т.е. информации ориентации путем объединения выходного сигнала датчика ускорения и выходного сигнала гироскопа друг с другом. В настоящем варианте осуществления, для вычисления очищаемой секции и угла щетки в момент времени t=n(n>0) сначала находят информацию ориентации (очищаемой секции и угла щетки в момент времени t=0) в опорной позиции (также именуемой начальной позицией) зубной щетки, затем берут выходные сигналы датчика ускорения и гироскопа для каждого такта, и затем суммируют с накоплением величины относительного перемещения и величины относительных поворотов относительно выходных сигналов предыдущего такта.
Ориентацию в момент времени включения питания можно задавать как опорную позицию. Альтернативно, можно предусмотреть такой механизм, который позволяет пользователю вводить опорную позицию (позицию в начале очистки) (например, нажимать переключатель в состоянии, в котором пользователь помещает щетку на верхнечелюстной передней наружной стороне, удерживая корпус щетки в горизонтальной позиции).
На фиг. 32 показана логическая блок-схема процесса обновления информации ориентации в девятом варианте осуществления. Эта логическая блок-схема демонстрирует процесс вычисления информации ориентации в момент t=n+1 из информации ориентации (очищаемой секции и угла щетки) в момент t=n и выходных сигналов датчика ускорения и гироскопа. В дальнейшем, обработка на БО будет описана согласно логической блок-схеме.
Сначала БО получает выходные сигналы датчика ускорения и гироскопа (S3200) и разделяет выходной сигнал датчика ускорения на составляющую статического ускорения и составляющую динамического ускорения с использованием полосового фильтра (S3201). Затем процессы различаются согласно наличию/отсутствию составляющей динамического ускорения (S3202) и наличию/отсутствию выходного сигнала гироскопа (S3203, S3204) как описано ниже. Заметим, что «наличие составляющей динамического ускорения» означает, что абсолютное значение составляющей динамического ускорения больше заранее определенного порогового значения. Аналогично, «наличие выходного сигнала гироскопа» означает, что абсолютное значение выходного сигнала гироскопа больше заранее определенного порогового значения.
(1) В случае отсутствия составляющей динамического ускорения и отсутствия выходного сигнала гироскопа
В этом случае, не существует изменения позиции и угла зубной щетки, и БО, таким образом, выводит информацию ориентации в момент t=n как информацию ориентации в момент t=n+1 (S3205). Заметим, что очищаемую секцию и угол щетки в момент t=n+1 можно вычислять, находя трехмерную ориентацию зубной щетки из составляющей статического ускорения датчика ускорения, вместо того, чтобы выводить информацию ориентации в момент t=n как есть.
(2) В случае отсутствия составляющей динамического ускорения и наличия выходного сигнала гироскопа
Если корпус зубной щетки поворачивается вокруг оси в направлении гравитационного ускорения в состоянии, когда любая ось датчика ускорения совпадает с направлением гравитационного ускорения, выходной сигнал датчика ускорения вовсе не изменяется (наблюдается только составляющая статического ускорения). Таким образом, когда информация ориентации вычисляется только из выходного сигнала датчика ускорения, вращательное движение вокруг оси нельзя обнаружить, что может приводить к ошибке. Такое явление может происходить в случае, когда корпус зубной щетки по большей части оказывается в вертикальной ориентации (т.е. ориентации, в которой ось y совпадает с направлением гравитационного ускорения), например, в ходе чистки в наклонном положении.
Затем, когда не существует изменения выходного сигнала датчика ускорения и существует изменение выходного сигнала гироскопа, БО обновляет информацию ориентации с использованием только выходного сигнала гироскопа. Здесь, значительное изменение выходного сигнала гироскопа возникает только при вращении вокруг оси, которая совпадает с направлением гравитационного ускорения. В настоящем варианте осуществления рассматривается только вращение вокруг оси y, поскольку вращательное движение вокруг оси x и вращательное движение вокруг оси z вряд ли происходит в фактической операции очистки. Вращательное движение вокруг оси y, в основном, приводит к изменению угла щетки, и БО, таким образом, находит угол щетки в момент времени t=n+1 путем вычисления величины углового изменения Δθzx вокруг оси y из выходного сигнала гироскопа и прибавления Δθzx к углу щетки в момент времени t=n (S3206).
Таким образом, используя информацию гироскопа, можно точно вычислить изменение угла щетки, вызванное вращательным движением вокруг оси, которое нельзя определить с помощью только датчика ускорения.
Заметим, что также можно рассматривать не только вращательное движение вокруг оси y, но и вращательное движение вокруг оси x или оси z. Например, вращательное движение вокруг оси x, в основном, приводит к смещению позиции щетки. Затем, позицию щетки в момент времени t=n+1 можно найти путем вычисления самой величины перемещения щетки из величины углового изменения вокруг оси x и расстояния от центра вращения до щетки и затем сложения вычисленной величины с позицией щетки в момент времени t=n.
(3) В случае наличия составляющей динамического ускорения и наличия выходного сигнала гироскопа
В этом случае, БО находит очищаемую секцию в момент времени t=n+1 с использованием соответствующих составляющих динамического ускорения в направлении оси x, в направлении оси y и в направлении оси z, полученных из выходного сигнала датчика ускорения (S3207). В частности, БО находит позицию щетки в момент времени t=n+1 путем вычисления соответствующих величин перемещения в направлении оси x, в направлении оси y и в направлении оси z в каждом такте из двойных интегралов составляющих динамического ускорения вычисленных величин перемещения с позицией щетки в момент времени t=n. Нахождение позиции щетки (относительной позиции относительно опорной позиции) позволяет оценивать очищаемую секцию. Кроме того, также предпочтительно вычислить очищаемую секцию из составляющего статического ускорения датчика ускорения и сравнивать результат вычисления из составляющей статического ускорения с результатом вычисления из составляющей динамического ускорения, чтобы, таким образом, повысить точность вычисления.
Кроме того, информация величины перемещения и направления перемещения можно использовать для сужения выбора очищаемых секций. Например, сначала, аналогично процессу оценивания очищаемой секции в первом варианте осуществления (см. фиг. 7 и 8), БО использует составляющую статического ускорения датчика ускорения для задания очищаемой секции как любой из «верхнечелюстной передней наружной стороны», «верхнечелюстной передней внутренней стороны», «верхнечелюстной окклюзионной поверхности», «верхнечелюстной правой наружной стороны или верхнечелюстной левой внутренней стороны», «верхнечелюстной левой наружной стороны или верхнечелюстной правой внутренней стороны», «нижнечелюстной передней наружной стороны», «нижнечелюстной передней внутренней стороны», «нижнечелюстной окклюзионной поверхности», «нижнечелюстной правой наружной стороны или нижнечелюстной левой внутренней стороны» и «нижнечелюстной левой наружной стороны или нижнечелюстной правой внутренней стороны». На этой стадии трудно отличить «верхнечелюстную правую наружную сторону» от «верхнечелюстной левой внутренней стороны». Аналогично, трудно отличить «верхнечелюстную левую наружную сторону» от «верхнечелюстной правой внутренней стороны», «нижнечелюстную правую наружную сторону» от «нижнечелюстной левой внутренней стороны» и «нижнечелюстную левую наружную сторону» от «нижнечелюстной правой внутренней стороны». Затем БО вычисляет величину перемещения щетки путем сравнения величины перемещения щетки (пройденное расстояние) за единицу времени, вычисленной из составляющей динамического ускорения, с заранее определенным пороговым значением. Если величина перемещения превышает пороговое значение, БО определяет, что существует изменение очищаемой секции между моментами до и после перемещения, и, в противном случае, определяет, что не существует изменения очищаемой секции. Затем, если определено, что существует изменение очищаемой секции, БО сужает выбор очищаемой секции после перемещения на основании очищаемой секции до перемещения (в момент времени t=n) и величины перемещения и направления перемещения в это время. Например, если очищаемая секция в момент времени t=n является правосторонним зубным рядом, и совершается перемещение влево, очищаемую секцию после перемещения можно задать как левосторонний зубной ряд. Эта информация позволяет делать различие, например, между «верхнечелюстной правой наружной стороной» и «верхнечелюстной левой внутренней стороной» для более детального сужения выбора очищаемой секции.
Кроме того, угол щетки можно вычислять в дальнейшем двумя способами: угол вычисляется из составляющей статического ускорения датчика ускорения; и угол вычисляется путем сложения величины углового изменения вокруг оси y, полученной из выходного сигнала гироскопа, с углом щетки на один такт раньше. Первый метод имеет преимущество в том, что позволяет вычислять абсолютный угол щетки. Однако, согласно исследованиям авторов настоящего изобретения, он имеет недостаток в том, что ошибка вычисления угла щетки увеличивается с увеличением наклона корпуса зубной щетки, хотя ошибка вычисления угла щетки мала, когда корпус зубной щетки принимает горизонтальную ориентацию. С другой стороны, последний метод имеет преимущество в том, что он позволяет непосредственно вычислять величину углового изменения вокруг оси y, но имеет также недостаток в том, что происходит накопление ошибки, поскольку вычисляется только относительный угол.
Затем, предпочтительно переключаться между первым методом и последним методом в зависимости от ориентации корпуса зубной щетки. В частности, горизонтальность корпуса зубной щетки оценивается с использованием абсолютного значения |y| составляющей статического ускорения датчика ускорения в направлении y. Когда |y| достигает 0G, корпус зубной щетки считается горизонтальным. БО отслеживает значение |y| для каждого такта и выводит угол щетки, вычисленный на основании выходного сигнала гироскопа, если |y| больше или равен заранее определенному пороговому значению (т.е., если горизонтальность мала) (S3208). Например, если опорный угол гироскопа (равны углу щетки на один такт раньше) равен 45 градусов, и величина углового изменения вокруг оси y, вычисленная из выходного сигнала гироскопа в текущем такте, равна −15 градусов, угол щетки вычисляется как 30 градусов. С другой стороны, если |y| меньше порогового значения (т.е., если горизонтальность велика), угол щетки вычисляется на основании выходного сигнала датчика ускорения (S3208). Если горизонтальность корпуса зубной щетки велика, абсолютные значения составляющих статического ускорения датчика ускорения в направлении x и датчика ускорения в направлении z, в общем случае, выглядят следующим образом:
угол щетки≈0 градусов: |x|≈0, |z≈1
угол щетки≈45 градусов: |x|≈|z|≈0,707
угол щетки≈90 градусов: |x|≈1, |z|≈0.
Таким образом, угол щетки можно вычислять, вычисляя |x| или |z| или обе величины. Здесь, если угол щетки вычисляется как 30 градусов из выходного сигнала датчика ускорения, опорный угол гироскопа калибруется на 30 градусов с использованием этого значения. Соответственно, ошибку, вызванную накопительным сложением, можно снижать как можно скорее. Хотя здесь горизонтальность корпуса зубной щетки вычисляется с использованием значения |y|, также предпочтительно вычислять горизонтальность корпуса зубной щетки, с учетом значений |x| и |z|.
(4) В случае наличия составляющей динамического ускорения и отсутствие выходного сигнала гироскопа
Это соответствует случаю, когда корпус зубной щетки совершает прямолинейное (поступательное) движение. Однако состояние (4) редко имеет место в операции в ходе чистки, поскольку полость рта узка. Заметим, что в случае (4), аналогично случаю (3), очищаемую секцию также можно вычислять из составляющей динамического ускорения (S3209).
Согласно методу в настоящем варианте осуществления, как описано выше, очищаемую секцию и угол щетки можно точно вычислять путем объединения выходного сигнала датчика ускорения и выходного сигнала гироскопа друг с другом.
(Другие)
Конфигурации вышеописанных вариантов осуществления проиллюстрированы только в качестве примеров настоящего изобретения. Объем настоящего изобретения не ограничивается вышеописанными вариантами осуществления, и в пределах объема настоящего изобретения возможны различные модификации. Например, предпочтительно, чтобы конфигурации вышеописанных вариантов осуществления можно было комбинировать друг с другом. Хотя в вышеописанных вариантах осуществления была проиллюстрирована вибрационная электрическая зубная щетка, использующая эксцентрик, настоящее изобретение применимо также к электрической зубной щетке, использующей любое другое движение. Например, настоящее изобретение применимо также к электрической зубной щетке, использующей вращательное возвратно-поступательное движение, линейное возвратно-поступательное движение, движение качения волосков щетки или подходящую комбинацию этих движений. В этом случае, режим работы можно переключать путем переключения частоты движения в зависимости от очищаемой секции или путем переключения между вращательным возвратно-поступательным движением и линейным возвратно-поступательным движением. Кроме того, настоящее изобретение предпочтительно применять к электрической зубной щетке такого типа, который имеет ультразвуковой вибрационный элемент на щеточном участке и осуществляет очистку с использованием вибрации щетки и ультразвуковой волны.
Кроме того, также предпочтительно вычислять позицию щетки с использованием информации ориентации, полученной от магнитного датчика и пр. Полосовой фильтр, например, фильтр высоких частот, можно использовать для выделения составляющей динамического ускорения из выходного сигнала датчика ускорения. Здесь, для удаления шума, вызванного вибрацией щетки, также предпочтительно вырезать частотную составляющую от 100 Гц до 300 Гц, которая соответствует частоте возбуждения щетки. Что касается передних зубов, ориентация щетки изменяется на 180 градусов в зависимости от того, держит ли пользователь корпус зубной щетки левой рукой или правой рукой. Таким образом, пользователю можно позволить зарегистрировать доминирующую руку (руку, которой пользователь держит зубную щетку), чтобы алгоритм определения очищаемой секции или режима работы (направления вращения двигателя, движения щетки) изменялся согласно зарегистрированной доминирующей руке.
Корпус зубной щетки можно снабдить вогнутой/выпуклой формой для направления (или задания) позиции хвата. Например, если выступы и углубления присутствуют на концевом участке наконечника корпуса зубной щетки (в позиции касания подушечкой или суставом большого или указательного пальца, когда пользователь держит корпус зубной щетки), пользователь осознанно или неосознанно держит зубную щетку таким образом, чтобы пальцы ложились на выступы и углубления. Это используется для приведения пользователя в заранее определенное состояние хвата. Обычно, если ориентация щетки под углом вокруг оси y (в отрицательном направлении по оси z) на фиг. 3 равна 0 градусов, два выступа (или углубления) предусмотрены в позициях около ±45 градусов, и два углубления (или выступа) предусмотрены в позициях около ±135 градусов. Когда пользователь держит зубную щетку пальцами, зафиксированными на этих выступах и углублениях, пользователь может легко удерживать угол щетки, равный 45 градусов.
Хотя в вышеописанных вариантах осуществления для идентификации очищаемой секции (различения между наружной стороной и внутренней стороной), в порядке иллюстрации, используются датчик температуры, камера и оптический датчик, дополнительно можно использовать датчик расстояния, например, ультразвуковой датчик. Например, аналогично датчику температуры на фиг. 24, датчик расстояния установлен на задней стороне щетки. При чистке наружной стороны датчик расстояния находится вблизи щеки или контактирует с ней и, таким образом, измеренное значение датчика расстояния чрезвычайно мало. С другой стороны, при чистке внутренней стороны, датчик расстояния обращен в полость рта и, таким образом, измеренное значение расстояния относительно велико. Таким образом, можно проводить различие между наружной стороной и внутренней стороной путем сравнения измеренного значения датчика расстояния с пороговым значением (например, 5 мм).
Перечень условных обозначений
1 корпус электрической зубной щетки
2 вибрирующий элемент
10 двигатель
11 ось вращения
12 схема возбуждения
13 аккумулятор
14 катушка
15 датчик ускорения
16 гироскоп
17 датчик нагрузки
18 датчик температуры
19 камера
20 участок ножки
21 щеточная часть
30 ось эксцентрика
100 зарядное устройство
120 БО
121 память
122 таймер
202 упругий элемент
203 подшипник
210 щетка
300 груз
S переключатель
Реферат
Изобретение относится к области медицины, в частности гигиены, и может быть использовано для чистки зубов. Электрическая зубная щетка содержит щетку, средство возбуждения для приведения щетки в движение, средство определения ориентации для определения ориентации щетки, средство вычисления секции для вычисления очищаемой секции на основании определяемой ориентации и средство управления для переключения режима работы средства возбуждения согласно вычисленной очищаемой секции. Технический результат - обеспечение дополнительного повышения мощности для удаления налета и эффективности консервативного лечения электрической зубной щеткой. 6 з.п. ф-лы, 32 ил.
Формула
щетку,
средство возбуждения для приведения щетки в движение,
средство определения ориентации для определения ориентации щетки,
средство вычисления секции для вычисления очищаемой секции на основании определяемой ориентации и
средство управления для переключения режима работы средства возбуждения согласно вычисленной очищаемой секции.
Комментарии