Зубная щетка с системой выбора на основе переменного сенсорного воздействия и способ ее работы - RU2652325C1
Код документа: RU2652325C1
Чертежи











Описание
Настоящая система относится к системе зубной щетки и, в частности, к системе электронной зубной щетки, имеющей сенсорный в отношении прикосновения корпус для выбора одной или более функций, и способ ее работы.
Устройства для поддержания здоровья полости рта используются для поддержания здоровья полости рта и обычно включают в себя электронные зубные щетки и устройства для очистки межзубных промежутков водой. Электронные зубные щетки обычно имеют поворачивающиеся и/или вибрирующие головки с щетинками, которые контактируют с зубами пользователя для очистки зубов и/или удаления налета. Хорошо известная зубная щетка вибрирующего типа известна как зубная щетка Philips Sonicare™ и имеет вибрирующую головку. Устройства для очистки межзубных промежутков водой, например, Philips Airfloss™ и подобные, обычно используют воду в качестве очищающего средства и имеют головку, которая выбрасывает направленную водную струю для принудительного удаления органических остатков из межзубных промежутков пользователя. Для запуска большинства устройств для поддержания здоровья полости рта (например, электронных зубных щеток и устройств для очистки межзубных промежутков водой) пользователь должен нажать небольшую кнопку вкл./выкл. Эта кнопка склонна накапливать органические остатки и трудна для обнаружения при использовании, особенно, если пользователь не смотрит непосредственно на устройство для поддержания здоровья полости рта.
Система(ы), устройство(а), способ(ы), конструкция (и), пользовательский интерфейс(ы), компьютерная программа(ы), процессы и т.д. (здесь и далее каждый из которых называется системой, если только контекст не указывает иного), описанные в настоящем документе, направлены на решение проблем систем предшествующего уровня техники.
Согласно вариантам осуществления настоящей системы раскрыто устройство для полости рта, содержащее корпусный участок, имеющий первый и второй концы и участок для захватывания, расположенный между первым и вторым концами; инструмент для очистки полости рта, соединенный с первым концом корпусного участка и содержащий головку зубной щетки, имеющую первую и вторую группы щетинок различной жесткости, при этом вторая группа щетинок имеет регулируемое удлинение; исполнительный механизм, соединенный со второй группой щетинок и выполненный с возможностью управления удлинением второй группы щетинок относительно первой группы щетинок; по меньшей мере один сенсорный датчик прикосновения (TS), установленный на корпусном участке и выдающий значение датчика, указывающее приложенную к нему силу; и блок управления, выполненный с возможностью сравнения значения датчика с пороговым значением и запуска исполнительного механизма для удлинения второй группы щетинок относительно первой группы щетинок на основании результатов определения.
Инструмент для очистки полости рта также имеет первый и второй концы инструмента и полость, расположенную между первым и вторым концами инструмента, при этом полость имеет противоположные концы. Исполнительный механизм может дополнительно содержать электро-активный полимер (ЭАП), расположенный в полости инструмента для очистки полости рта, причем вторая группа щетинок соединена с несущим элементом, расположенным в полости инструмента для очистки полости рта. Первый конец ЭАП соединен с несущим элементом, а второй конец ЭАП соединен с инструментом для очистки полости рта на противоположном конце полости. ЭАП удлиняет вторую группу щетинок относительно первой группы щетинок в ответ на приложение к исполнительному механизму напряжения, равного или большего, чем пороговое значение напряжения ЭАП. Когда к исполнительному механизму приложено напряжение меньше порогового значения, ЭАП не удлиняет вторую группу щетинок относительно первой группы щетинок. Кроме того, указанный по меньшей мере один TS-датчик может по существу охватывать корпусный участок и может содержать множество датчиков, при этом каждый датчик по существу охватывает корпусный участок. Указанный по меньшей мере один TS-датчик может также иметь наружную поверхность, которая расположена заподлицо с наружной поверхностью корпусного участка.
Другой вариант осуществления включает в себя устройство для очистки полости рта, содержащее корпусный участок, имеющий первый и второй концы и участок для захватывания, расположенный между первым и вторым концами; инструмент для очистки полости рта, соединенный со стержнем исполнительного механизма на первом конце корпусного участка и содержащий головку зубной щетки, имеющую первую и вторую группы щетинок различной жесткости, при этом вторая группа щетинок имеет регулируемое удлинение; первый исполнительный механизм, соединенный со стержнем исполнительного механизма и выполненный с возможностью приведения в действие стержня исполнительного механизма с требуемой частотой; второй исполнительный механизм, соединенный со второй группой щетинок и выполненный с возможностью управления удлинением второй группы щетинок относительно первой группы щетинок; сенсорный датчик прикосновения, установленный на корпусном участке и выдающий значение датчика, указывающее приложенную к нему силу; и блок управления, который сравнивает значение датчика с пороговым значением и приводит в действие второй исполнительный механизм для удлинения второй группы щетинок относительно первой группы щетинок на основании результатов определения.
Инструмент для очистки полости рта может иметь первый и второй концы инструмента и полость, расположенную между первым и вторым концами инструмента, при этом полость имеет противоположные концы, причем второй исполнительный механизм может дополнительно содержать электро-активный полимер (ЭАП), расположенный в полости инструмента для очистки полости рта. Вторая группа щетинок может соединяться с несущим элементом, расположенным в полости инструмента для очистки полости рта. Кроме того, первый конец ЭАП соединен с несущим элементом, а второй конец ЭАП соединен с инструментом для очистки полости рта на противоположном конце полости. ЭАП удлиняет вторую группу щетинок относительно первой группы щетинок в ответ на приложение к исполнительному механизму напряжения, которое равно или больше порогового значения напряжения ЭАП. Если ко второму исполнительному механизму приложено напряжение меньше порогового значения напряжения, ЭАП не удлиняет вторую группу щетинок относительно первой группы щетинок. Блок управления может дополнительно быть выполнен с возможностью управления рабочей частотой первого исполнительного механизма на основании давления, приложенного к TS-датчику.
Еще один вариант осуществления включает в себя способ приведения в действие устройства для очистки полости рта, имеющего корпусный участок и инструмент для очистки полости рта, отходящий от корпусного участка, при этом инструмент для очистки полости рта имеет первую и вторую щетки, первый исполнительный механизм для приведения в действие инструмента для очистки полости рта, при этом корпусный участок имеет участок для захватывания, расположенный между противоположными концами корпусного участка и выполненный с возможностью захватывания пользователем, при этом способ выполняется по меньшей мере одним блоком управления устройства для очистки полости рта и содержит этапы, на которых: получают первую информацию датчика, созданную сенсорным датчиком прикосновения, расположенным в участке для захватывания корпусного участка, при этом информация датчика соответствует силе, приложенной к поверхности TS-датчика в первый раз; выбирают функцию из множества функций согласно первой информации датчика; управляют первым исполнительным механизмом согласно выбранной функции; получают дополнительную информацию датчика, созданную сенсорным датчиком прикосновения, при этом дополнительная информация датчика соответствует силе, приложенной пользователем к поверхности сенсорного датчика прикосновения во второй раз; определяют, является ли вторая информация датчика большей или равной пороговому значению; и приводят в действие второй исполнительный механизм для удлинения одной из первой и второй щеток относительно другой из первой и второй щеток, если на этапе определения определено, что вторая информация датчика больше или равна пороговому значению. Способ может дополнительно содержать этап, на котором приводят в действие второй исполнительный механизм для отведения одной из первой и второй щеток относительно другой из первой и второй щеток, если на этапе определения определено, что вторая информация датчика меньше порогового значения.
Настоящее изобретение объяснено более подробно в нижеприведенных примерных вариантах осуществления и со ссылкой на чертежи, на которых идентичные или подобные элементы частично обозначены одними и теми же номерами ссылочных позиций, и признаки множества примерных вариантов осуществления могут быть скомбинированы. На чертежах:
Фиг. 1 - вид спереди в перспективе участка системы зубной щетки, имеющей сенсорный корпус согласно вариантам осуществления настоящей системы;
Фиг. 2 - вид спереди в перспективе участка системы зубной щетки, имеющей сенсорный корпус согласно другим вариантам осуществления настоящей системы;
Фиг. 3 - поперечный разрез участка системы зубной щетки, выполненный по линиям 3-3 фиг. 1, согласно вариантам осуществления настоящей системы;
Фиг. 4 - покомпонентное изображение в перспективе датчика давления резистивного типа, чувствительного к силе, согласно вариантам осуществления настоящей системы;
Фиг. 5 - вид сбоку датчика давления резистивного типа, чувствительного к силе, согласно вариантам осуществления настоящей системы;
Фиг. 6 - покомпонентное изображение в перспективе датчика давления резистивного типа, чувствительного к силе, согласно вариантам осуществления настоящей системы;
Фиг. 7 - вид сбоку в перспективе участка системы зубной щетки, расположенного зарядной базе согласно вариантам осуществления настоящей системы;
Фиг. 8A - вид сбоку в перспективе с частичным разрезом участка системы зубной щетки, имеющей сенсорный корпус, включающий в себя электро-активный (ионный) полимерный (ЭАП) исполнительный механизм согласно вариантам осуществления настоящей системы;
Фиг. 8B - вид сбоку в перспективе с частичным разрезом участка системы зубной щетки с напряжением, приложенным к ЭАП- исполнительному механизму, согласно вариантам осуществления настоящей системы;
Фиг. 8C - вид в разрезе участка системы зубной щетки, выполненном по линиям 8C-8C фиг. 8A, согласно вариантам осуществления настоящей системы.
Фиг. 8D - вид в разрезе участка системы зубной щетки, выполненном по линиям 8D-8D фиг. 8C, согласно вариантам осуществления настоящей системы.
Фиг. 9A - график, иллюстрирующий непрерывную прямую связь между силой, приложенной к датчику(ам) давления и значениями числа движений зубной щетки за минуту (BSM) согласно вариантам осуществления настоящей системы;
Фиг. 9B - график, иллюстрирующий дискретную взаимосвязь между силой, приложенной к датчику(ам) давления и значениями BSM, согласно вариантам осуществления настоящей системы;
Фиг. 10 - вид спереди в перспективе участка системы устройства для очистки межзубных промежутков (IDCD), имеющей сенсорный корпус, согласно вариантам осуществления настоящей системы;
Фиг. 11 - вид спереди в перспективе участка IDCD-системы, имеющей сенсорный корпус, согласно другим вариантам осуществления настоящей системы;
Фиг. 12 - схема последовательности операций, иллюстрирующая процесс, выполняемый системой согласно вариантам осуществления настоящей системы; и
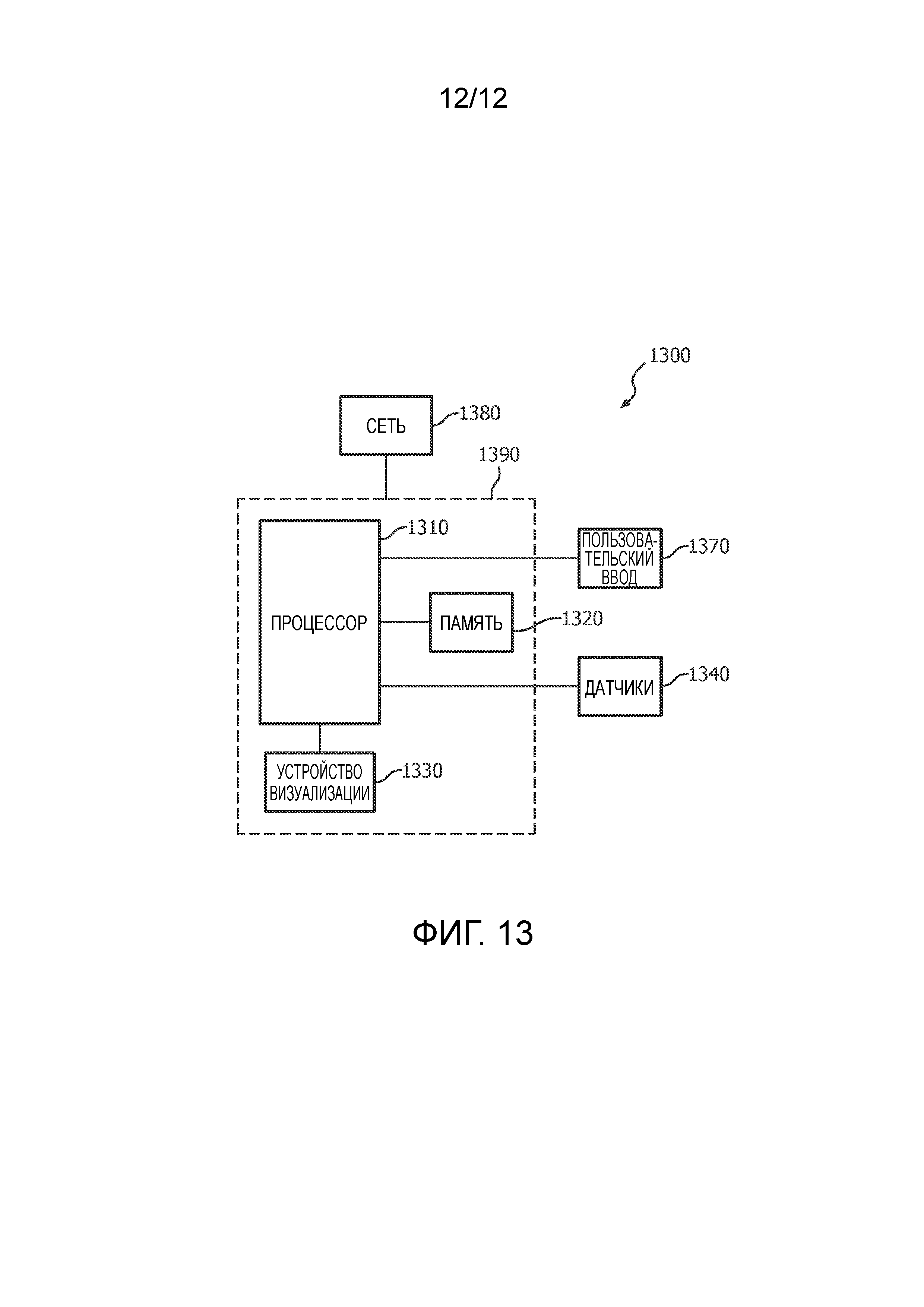
Фиг. 13 - участок системы согласно вариантам осуществления настоящей системы.
Нижеприведенное представляет собой описания иллюстративных вариантов осуществления, которые совместно с нижеприведенными чертежами демонстрируют вышеупомянутые, а также дополнительные признаки и преимущества. В нижеприведенном описании, с целями объяснения, а не ограничения, изложены иллюстративные подробности, например, конфигурация, интерфейсы, методы, атрибуты элементов и т.д.. Однако специалистам в данной области техники очевидно, что другие варианты осуществления, выходящие за рамки этих подробностей, находятся в пределах приложенной формулы. Кроме того, для ясности подробные описания хорошо известных устройств, схем, инструментов, методов и способов исключены, чтобы не перегружать описание настоящей системы. Следует определенно понимать, что чертежи включены с целью иллюстрации и не представляют всего объема настоящей системы. На сопроводительных чертежах подобные номера ссылочных позиций на различных чертежах могут обозначать подобные элементы.
Фиг. 1 - вид спереди в перспективе участка системы 100 зубной щетки (здесь и далее для ясности системы 100), имеющей сенсорный корпусный участок 102 (также называемый корпусом 102) согласно вариантам осуществления настоящей системы. Сенсорный в отношении прикосновения корпус 102 может иметь первый и второй концы 120 и 122, соответственно, участок 118 для захватывания (также называемый захват 118), расположенный между первым и вторым концами 120 и 122, соответственно, и один или более сенсорных датчиков прикосновения, например, сенсорных колец 104-1-104-N (в целом 104-x) и/или сенсорных датчик 106 прикосновения кнопочного типа (представленный в виде кольцевой кнопки), выполненной в виде любой подходящей конструкции. Сенсорные кольца 104-x могут иметь протяженность вдоль продольной оси (LA) корпуса 102, равную DL, и могут по существу охватывать по окружности корпус 102. Различные сенсорные кольца 104-x могут иметь одинаковую или различную протяженность DL. Сенсорные датчики прикосновения (например, включающие в себя 104-x и/или 106) могут воспринимать силу, оказывающую на него воздействие (например, пользователем) и формировать соответствующую информацию датчика. Эта информация датчика может затем предоставляться на блок управления или процессор 107 системы 100 для дальнейшей обработки. Хотя TS-датчики 104-x и/или 106 представлены в виде колец, следует понимать, что могут использоваться TS-датчики любой требуемой формы, при этом число и распределение TS-датчиков или места/области расположения датчиков могут выбираться так, чтобы различать различные сжимающие действия и/или не допускать ложных срабатываний или ошибок.
TS-датчики (например, 104-x и/или 106) могут воспринимать силу, которую пользователь прилагает к участкам захвата 118, который имеет TS-датчики (104-x и/или 106), используя любой подходящий для датчика способ. Например, TS-датчики могут включать в себя чувствительные к силе (FS) датчики, например, датчики тензометрического, пьезоэлектрического, емкостного и/или резистивного типа, которые могут быть встроены в захват 118 корпуса 102. FS-датчики резистивного типа могут включать в себя один или более чувствительных к силе резисторов, имеющих проводящий полимер, который может изменять сопротивление заданным образом, после приложения силы к одной или более частям его поверхности. Это сопротивление может затем выдаваться в виде информации датчика для дальнейшей обработки блоком 107 управления. В частности, блок 107 управления может переводить выходное сопротивление в значение, указывающее силу, приложенную пользователем к соответствующему FS-датчику. Когда сила, приложенная пользователем, увеличивается, сопротивление увеличивается, и значение, указывающее силу, приложенную пользователем к соответствующему FS-датчику, может увеличиваться соответственно (например, линейно, и т.д.). Также предусмотрено, что варианты осуществления настоящей системы могут включать в себя множество TS -датчиков (например, расположенных в виде массива, матрицы и т.д., в некоторых областях, в требуемой конфигурации, и т.д.) для улучшения определения сжимающих действий и/или обеспечения информации, указывающей область захвата 118, к которой прикладывается сила.
Инструмент 108 для очистки полости рта (также названный инструментом 108), предназначенный для очистки полости рта, может соединяться с корпусом 102 с использованием любого подходящего способа (например, посадки с натягом и т.д.). Инструмент 108 может включать в себя корпус 117 инструмента и может включать в себя головку 114 зубной щетки (также называемую чистящей головкой или зубной щеткой 114), имеющую щетки 110 (щетину, резиновый элемент и т.д.). В дополнение или альтернативно, корпус 117 инструмента может включать в себя носик для воды. Инструмент 108 может соединяться с исполнительным механизмом 109, например, электродвижущим приводным устройством, при помощи любого подходящего способа, например, посредством стержня 112 исполнительного механизма, для приведения в действие электродвижущим приводным устройством. Однако в других вариантах осуществления инструмент 108 может соединяться с исполнительным механизмом 109 при помощи магнитного соединения. электродвижущее приводное устройство может включать в себя вращательный, линейный или вибрирующий двигатели, которые могут выдавать соответствующее движение и/или передачу, которые могут превращать указанное движение в движение требуемого типа (например, вращательное движение в колебательное вращательное движение, и т.д.). Например, используется двигатель, выполненный с возможностью создания колебаний в широком диапазоне частот для создания значимо и заметно различных режимов работы для конечных потребителей, например, звуковой (9000-40000 движений в минуту) или ультразвуковой двигатель (> 2400 движений в минуту).
В представленных вариантах осуществления предполагается, что исполнительный механизм 109 может выдавать колебательное движение, как представлено стрелкой 111, для приведения в действие инструмента108. В других вариантах осуществления инструмент108 может получать возвратно-поступательное вращательное движение, как представлено стрелками 115, 113. В других вариантах осуществления инструмент108 может включать в себя передачу, которая может преобразовывать направление выходного движения электродвижущего приводного устройства 109. В других вариантах осуществления предполагается, что чистящая головка 114 может соединяться с одним или более несущими элементами, которые могут соединяться с электродвижущим приводным устройством 109 (например, непосредственно или посредством любого подходящего соединения и/или передающей системы) и может двигаться относительно корпуса 117 очищающего инструмента.
Кроме того, в некоторых вариантах осуществления предусматривается, что проход 179 для потока текучей среды может быть соединен для сообщения резервуара 173 для текучей среды и проема 177 инструмента 108. Исполнительный механизм 175 с текучей средой (например, гидронасос) может работать под управлением блока 107 управления, для управления истечением текучей среды из резервуара 173 по проходу 179 для текучей среды для выброса в проем 177. Соответственно, исполнительный механизм 175 с текучей средой может работать для нагнетания текучей среды. Проход 179 для текучей среды может включать в себя канал 171, расположенный между концом стержня 112 исполнительного механизма и проемом 177. Проход 179 для текучей среды может дополнительно включать в себя канал в стержне 112 исполнительного механизма, сообщающийся с исполнительным механизмом 175 с текучей средой. Исполнительный механизм 175 с текучей средой может дополнительно соединяться с резервуаром 173 для текучей среды, который может включать в себя требуемую текучую среду (например, воду, очищающую текучую среду, абразивную текучую среду, зубную пасту и т.д.) и может нагнетать требуемую текучую среду так, чтобы она вытекала из резервуара 173 для текучей среды через проем 177 по проходу 179 для текучей среды под управлением блока управления и согласно давлению или силе, приложенной к сенсорному датчику(ам) прикосновения (104-x и/или 106) на корпусе 102. В некоторых вариантах осуществления может обеспечиваться множество резервуаров для текучей среды и проемов инструментов, при этом проход 179 для текучей среды может включать в себя множество проходов для текучей среды, каждый из которых обеспечивается между соответствующим резервуаром для текучей среды и соответствующим проемом в инструменте. Каждый из множества проходов для текучей среды может включать в себя исполнительный механизм для текучей среды для нагнетания текучей среды по соответствующему проходу для текучей среды под управлением блока 107 управления.
Фиг. 2 - вид спереди в перспективе участка системы 200 зубной щетки, имеющей сенсорный корпус 202, согласно другим вариантам осуществления настоящей системы. Система 200 зубной щетки аналогична системе 100 зубной щетки и включает в себя корпус 202, сенсорное кольцо 204 и инструмент 208, аналогичные, соответственно, корпусу 102, сенсорному кольцу(ам) 104-x и инструменту108 системы 100 зубной щетки. Однако сенсорное кольцо 204 имеет протяженность вдоль длины ручки 218 корпуса 202, например, вдоль значительной или большей части длины. Соответственно, сенсорное кольцо 204 может иметь протяженность вдоль большей части длины продольной оси (LA) корпуса 202. Зарядное/удерживающее отверстие 231 может обеспечиваться для соединения корпуса 202 с зарядной базой, если необходимо. Зарядное/удерживающее отверстие 231 может включать в себя проем 233, ведущий в полость 237, имеющую закрытый конец 235, противоположный проему 233.
На фиг. 3 представлен поперечный разрез участка системы 100 зубной щетки, выполненный по линиям 3-3 фиг. 1, согласно вариантам осуществления настоящей системы. Сенсорное кольцо прикосновения 104-N может включать в себя наружную крышку 119 и датчик 116 давления. Сенсорное кольцо прикосновения 104-N может охватывать (или по существу охватывать) корпусный участок 102. Датчик 116 давления может включать в себя сенсорный датчик давления, который может воспринимать приложенное к нему давление и формировать соответствующий сигнал о давлении, который может предоставляться на блок 107 управления (фиг. 1) для дальнейшей обработки. Этот сигнал может представлять собой аналоговый или цифровой сигнал. Однако в вариантах осуществления настоящей системы предусматривается, что этот сигнал представляет собой аналоговый сигнал, указывающий сопротивление как функцию (линейную и т.д.) от давления, приложенного к датчику. Датчик 116 давления может использовать любой подходящий способ для сенсорного датчика. Например, датчик 116 давления может включать в себя датчики импеданса, например, сенсорные датчики резистивного и/или емкостного типа, и т.д., и может иметь кольцевую или полукольцевую форму для восприятия давления в цилиндрической области или тому подобных областях, если требуется. Наружная поверхность датчика 116 давления может располагаться заподлицо с наружной поверхностью окружающих участков корпуса 102. Например, сенсорное кольцо прикосновения 104-N (и/или другие TN-кольца 104-x) могут иметь наружную поверхность 121, которая может располагаться заподлицо или по существу заподлицо с наружной поверхностью 123 корпусного участка 102. Эта наружная поверхность 121 может быть дополнительно уплотнена относительно окружающих наружных участков корпуса 102 для изоляции датчика от загрязнения, например, воды и/или органических остатков. Корпус 102 может включать в себя полость 124, выполненную с возможностью вмещения по меньшей мере участка одного или более из зарядного устройства (например, индуктивного зарядного устройства), блока 107 управления, исполнительного механизма 109 и стержня исполнительного механизма 112, представленного на фиг. 1. Корпус 102 может включать в себя области выемок или вырезов вдоль его поверхности для вмещения одного или более TS-датчиков (106, 114-x и т.д.), при необходимости.
В некоторых вариантах осуществления датчик 116 давления может включать в себя множество зон давления (например, матрицу зон давления), каждая из которых может определять приложенное к ней давление. Соответственно, датчик 116 давления может формировать сигнал, указывающий зону(ы) давления, к которым прилагается давление, и, например, блок 107 управления может затем обнаруживать эти схемы давления с использованием любого подходящего способа. Затем обнаруженные схемы могут быть использованы для идентификации пользователя или типа пользователя (например, большая рука- взрослый, маленькая рука - ребенок) и конфигурирования работы (например, посредством управления исполнительным механизмом 109) системы 100 зубной щетки согласно обнаруженному пользователю или типу пользователя, и т.д.
В некоторых вариантах осуществления предусмотрено, что датчик 116 давления может включать в себя емкостные датчики, которые могут обнаруживать присутствие руки пользователя (например, с прикосновением или без него) и формировать соответствующий сигнал на основании расстояния между рукой пользователя и соседним участком датчика давления и/или силы, приложенной к датчику давления. Дополнительно предусмотрено, что датчик 116 давления может включать в себя датчики сенсорного типа и/или может включать в себя матрицу давления, которая может определять положение приложенного к ней давления и/или положение руки пользователя вблизи датчика, если требуется, и предоставлять эту информацию на блок 107 управления для дальнейшей обработки.
В других вариантах осуществления зубная щетка 102 может быть выполнена так, что один или более из TS-датчиков (например, 104-x и/или 106) может быть выполнен с возможностью функционирования в качестве переключателя вкл./выкл., а также сенсорного переключателя (например, чувствительного к давлению переключателя). Например, как только зубная щетка включается (например, исполнительный механизм 109 запускается блоком 107 управления) в результате приложения пользователем силы к одному или более выбранным TS-датчикам (например, 104-x и/или 106), блок 107 управления может определять значение приложенной силы (например, аналоговое значение сопротивления) для соответствующего TS-датчика (например, 104-x и/или 106). Затем на основании значения приложенной силы блок 107 управления может определять функцию для применения и запускать исполнительный механизм 109 согласно определенной функции. Таким образом, пользователь может держать захват 118, включать зубную щетку посредством однократного нажатия TS-датчика 106 и затем нажать и удерживать TS-датчик 106, используя требуемое давление и/или схему. Затем блок 107 управления может считывать значения силы с TS-датчика 106 (которые относятся к приложенной к нему силе) и выбирать требуемую функцию для запуска. Функции могут включать в себя такие функции, как массажная функция, функция глубокой очистки, функция легкой очистки, функция новичка, функция обучения, функция "пользователь- ребенок", функция "пользователь-взрослый" и т.д. Каждая из этих функций может иметь заданную частоту, схему, амплитуду и т.д. Блок 107 управления может затем управлять исполнительным механизмом 109 для работы согласно выбранной функции. В дополнительных вариантах осуществления один или более TS-датчиков (например, 104-x, 106) могут быть эргономично расположены на корпусе 102 и/или могут иметь эргономичную форму для увеличения легкости для пользователя и/или комфорта пользователя при удерживании и/или работе системы 100 зубной щетки.
Фиг. 4 представляет покомпонентное изображение в перспективе чувствительного к силе (FS) датчика 400 давления резистивного типа согласно вариантам осуществления настоящей системы. Датчик 400 давления может включать в себя проводящую полимерную пластину 450, имеющую, соответственно, первую и вторую большие поверхности 452 и 454, соответственно, первый и второй концы 458 и 459, и могут изменять сопротивление заданным образом (например, линейно и т.д.) вслед за приложением силы к одной или более поверхностям, например, первой и второй большим поверхностям 452 и 454, соответственно. Это сопротивление может быть преобразовано в значение силы (например, при необходимости, аналоговое значение или цифровое значение), включающее в себя величину силы, приложенной к датчику 400 давления, и может быть выведено на блок 456 вывода датчика 400 давления. Соответственно, когда сила увеличивается, значение силы может увеличиваться соответственно (например, линейно и т.д.). Может обеспечиваться аналого-цифровой преобразователь (A/D) для преобразования, при необходимости, значения силы из аналоговой формы в цифровую. Датчик 400 давления может включать в себя множество полимерных слоев, например, активный слой 460, определяющий активную область, разделительный слой 462, например, непроводящий пластиковый слой, и пленочный проводящий слой 464, образованные на гибкой подложке 465, представлено на фиг. 6. Активный слой 460 может включать в себя проводящий слой 466 и соединенный с ним электрический вывод 468. Разделительный слой 462 может включать в себя проем или вентиляционное отверстие 471 в полость 473, которое может работать для выравнивания давления между активным слоем 460 и проводящим пленочным слоем 464. Проводящий пленочный слой 464 может включать в себя соединенный с ним электрический вывод 472. Значение сопротивления может считываться между электрическими выводы 468 и 472, которые могут быть выполнены с возможностью соединения с блоком управления, если требуется.
Фиг. 5 представляет вид сбоку чувствительного к силе (FS) датчика 400 давления резистивного типа, установленного согласно вариантам осуществления настоящей системы. Опорный участок 474 может служить опорой для FS резистивного датчика 400 давления (здесь и далее датчик 400 давления) и может быть выполнен единым целым с корпусом 102, или может быть выполнен отдельно от корпуса 102 и вставлен в полость 124 корпуса 102 при необходимости. При необходимости блок 456 вывода может быть сложен для прохода через один или более проемов 491 в корпусе 102. Однако в других вариантах осуществления может обеспечиваться одно или более соединения через корпус 102 и/или один или более слоев (например, 460, 462, 464) датчика 400 давления. Соответственно, блок 456 вывода может быть выполнен с возможностью вмещения одного или более соединений. Датчик 400 давления может иметь любой подходящий размер и/или форму. Например, в некоторых вариантах осуществления датчик 400 давления может образовывать по меньшей мере часть кольца, которое может полностью или почти полностью охватывать корпус 102. Однако в других вариантах осуществления датчик давления может иметь другие формы, как, например, представлено на фиг. 6, который представляет покомпонентное изображение в перспективе чувствительного к силе датчика 600 резистивного типа (здесь и далее датчик 600 давления) согласно вариантам осуществления настоящей системы. Датчик 600 давления может быть выполнен аналогично датчику 400 давления, представленному на фиг. 4, и для ясности представлены аналогичные номера ссылочных позиций. Однако размер и/или форма могут быть различными. Например, датчик 600 давления может использоваться в TS-датчике 106 кнопочного типа. В других вариантах осуществления предусматривается, что датчик 400 давления может образовывать дугообразную форму (при рассмотрении сбоку), которая может проходить вокруг корпуса 102.
Фиг. 7 - вид сбоку в перспективе участка системы 100 зубной щетки, расположенной на зарядной базе 702 согласно вариантам осуществления настоящей системы. Корпус 102 может представлять собой сенсорный корпус и может быть выполнен с возможностью соединения с зарядной базой 702 для беспроводного получения электропитания, подходящего для его зарядки и/или работы.
Далее рассмотрен способ работы устройств (OHD) для поддержания здоровья полости рта (например, системы 100 зубной щетки, и т.д.), работающей согласно вариантам осуществления настоящей системы. При обнаружении, что пользователь сжал участок для захватывания OHD, блок управления может определить величину (например, значение) силы и/или схему силы (например, схему сжатия) и управлять OHD для выполнения одной или более функций, связанных с определенной величиной силы и/или схемой силы. Схема может определяться, когда в течение некоторого временного интервала, например, трех секунд, прикладываются различные силы. Однако могут использоваться другие временные интервалы. Таблица 1 иллюстрирует таблицу выбора функции согласно вариантам осуществления настоящей системы.
Различные сжимающие действия, например, сжимающие действия 1-3, могут включать в себя сжатие, сохранение сжимающей силы и высвобождение и ослабление силы/захвата на захвате 118 (или его участках) однократно, и в зависимости от силы сжатия пользователем захвата 118 определяется величина высвобождаемого вещества. Для различения сжимающих действий от других действий, например, захватывания захвата 118 или непрерывного сжатия для изменения рабочей частоты, например, требуемое действие, например, высвобождение вещества (например, зубной пасты или очистителя) запускается и выполняется только если сжатие и высвобождение произошли в заданный отрезок или диапазон времени, например, 0,1-0,2 сек. Таким образом, сжимающее действие может определяться как усиление и ослабление захвата, который происходит в заданном промежутке или диапазоне времени (например, около 0,1-0,2 секунды), при этом временной промежуток определяется двумя значениями: минимальным временем (например, 0,1 секунды) во избежание ошибочного запуска из-за неконтролируемого сжатия, и максимального времени (например, 0,2 секунды) для отличения сжимающего действия от непрерывного сжимающего действия для изменения рабочей частоты, когда захват 118 сжимается в течение более 0,2 секунды, но менее 3 секунд, или запуска щетинок второго типа, если захват 118 сжимается, например, более 3 секунд.
Соответственно, сила и/или давление используется для выбора и запуска различных функций. Например, могут быть выбраны три последовательных сжатия и может быть выбрана массажная функция, а могут быть выбраны два сжатия и запущенa обычная очищающая функция. Кроме того, может быть выбрано любое требуемое сочетание функций (например, массажная функция, функция глубокой очистки, функция легкой очистки, функция новичка, функция обучения, функция "пользователь-ребенок", функция "пользователь-взрослый" и т.д.) и оно может быть запущено в ответ на заданную частоту, схему, амплитуду и т.д., даже в процессе использования, когда выполняются другие функции. Например, при обычной очистке, если пользователь трижды быстро выполнил сжатие и ослабление, тогда включается массажная функция в процессе использования, до тех пор, пока другие три сжатия не остановят массаж и не переведут систему зубной щетки в обычный режим очистки или функции, которая была включена перед запуском массажной функции.
Выбор и/или запуск требуемой функции (й) может также достигаться посредством постукивания головки щетки по зубам, при этом датчик обнаруживает постукивание головки. Такой датчик может быть аналогичен описанным датчикам силы и/или другим датчикам, например, по меньшей мере, одному из светового датчика, датчика влажности и акселерометра. Как рассмотрено, эти датчики могут обнаруживать число и/или интенсивность постукиваний или силу постукиваний головки в полости рта, и, в ответ выбираются и/или запускаются различные функции. Например, два постукивания в полости рта могут обнаруживаться одним из этих датчиков, и в ответ может запускаться массажная функция. Функции могут включать в себя функции, например, массажную функцию, функцию глубокой очистки, функцию легкой очистки, функцию новичка, функцию обучения, функцию "пользователь- ребенок", функцию "пользователь-взрослый" и т.д. Каждая из этих функций может иметь заданную частоту, схему, амплитуду и т.д.
С помощью интерфейсов на основе силы пользователь обычно способен создать и запомнить от четырех до шести уровней давления /силы (по меньшей мере, пальцами), при этом увеличение числа уровней давления выше шести может привести к увеличенной частоте ошибок. Кроме того, следует отметить, что поскольку человеческое восприятие силы захвата не является линейным, диапазон каждого отличного уровня силы может необязательно иметь одинаковый размер. Например, диапазон силы, которую настоящая система может распознать как "слабый захват " меньше диапазона силы, которую эта система может распознать как "крепкий захват."
Для уменьшения ложного запуска перед запуском требуемой функции сначала должно пройти минимальное время запуска. Таким образом, только если сила обнаружена и поддерживается в заданном диапазоне, например, 10-20 миллисекунд, только тогда запускается требуемая функция. Соответственно, задержка (например, 10-20 миллисекунд) обеспечивается перед любым началом операций запуска. Кроме того, поскольку обычно люди не могут увеличить давление или сжатие очень постепенно, на обнаруженной силе /давлении на захват 118 выполняется сглаживание. Таким образом, если сила или сжатие продолжаются, например, сильный или усиливающийся захват, тогда реакция (то есть, увеличение рабочей частоты) обеспечивается с некоторой задержкой (перед запуском) и сглаживанием. Рабочая частота может быть изменена постепенно или ступенчато.
Система 100 зубной щетки может отключаться, когда сила не обнаруживается или когда обнаружена сила ниже некоторого порогового значения. Кроме того, может быть назначена кнопка отключения или участок чувствительного к давлению захвата для отключения при их сжатии. Альтернативно или в дополнение может использоваться другая информация датчика для определения, будет ли отключено устройство, например, акселерометр или световой датчик в захвате для более надежного определения, удерживает ли пользователь указанное устройство.
В других вариантах осуществления сжимающее действие может отображаться для запуска исполнительных механизмов в течение требуемого периода времени (например, 2 секунд и т.д.), которые могут высвобождать очищающее вещество, например, одно или более из зубной пасты, полоскания для полости рта и т.д., или может обеспечивать кратковременный вакуум для удаления органических остатков с зубов и т.д. Пользователь может выбрать различные сжимающие действия (например, сжимающие действия 1, 2 и/или 3), которым соответствует сжимающее действие или сжимающие действия могут отличаться друг от друга типом сжатия (например, длинное, среднее или короткое могут соответствовать требуемому сжимающему действию, например, сжимающему действию 1, сжимающему действию 2 и сжимающему действию 3, соответственно). В некоторых вариантах осуществления определяется только одно сжимающее действие и этому сжимающему действию может соответствовать требуемая функция (например, для запуска очищающего устройства для межзубных промежутков и т.д.). В других вариантах осуществления сила сжимающего действия может соответствовать скорости зубной щетки, как описано ниже.
В некоторых вариантах осуществления для определения функции для применения может использоваться последовательность действий конечного автомата. Например, в некоторых вариантах осуществления после исходного запуска первого исполнительного механизма (например, включения) для передачи силы и/или движения к инструменту при стандартной настройке (например, 5000 движений щетки в минуту (BSM)), система может определять, насколько большая сила приложена к сенсорному датчику, и затем определять соответствующую функцию для применения к исполнительному механизму. Затем блок управления может управлять работой исполнительного механизма согласно соответствующей определенной функции.
Варианты осуществления, представленные выше в Таблице 1, являются только примером, и предусмотрено множество других настроек (например, для режимов очистки и т.д.). Например, в других вариантах осуществления одна или более из функций силы, схем и соответствующего очищающего режима может быть установлена системой и/или пользователем. В других вариантах осуществления пользователь может быть идентифицирован (например, посредством анализа процесса захватывания) и для требуемого пользователя может использоваться соответствующая схема соответствия функций. Таким образом, например, процесс может запускать различные функции для первого пользователя, например, родителя, и второго пользователя, например, ребенка, для которого процесс может запускать функции для детей, например, низкоскоростное (низкочастотное) чистящее действие, выпуск детской зубной пасты и т.д.
В некоторых вариантах осуществления система может включать в себя возможность для пользователя установить/переустановить таблицу выбора функции с использованием системы на основе меню, визуализируемой на любом подходящем устройстве, например, дисплее системы или дисплее любого другого подсоединяемого пользовательского устройства, например, телефона пользователя, и т.д. Соответственно, система может взаимодействовать с пользовательским устройством с использованием любого подходящего способа связи, например, проводных и/или беспроводных способов связи, например, Bluetooth™ и т.д.
В других вариантах осуществления взаимодействие с пользователем (например, посредством приложения силы и/или схемы) может использоваться для выбора режима жесткости щетинок, при котором жесткость очищающих щетинок может регулироваться, например, с помощью регулирования выступания требуемых щетинок (например, жесткие щетинки в настоящих вариантах осуществления), когда пользователь захватывает захват с требуемой силой и/или по требуемой схеме. Например, когда определено, что пользователь сильно сжимает захват в течение более 10 секунд, группа жестких (твердых) щетинок может быть выдвинута из чистящей головки за пределы выступания группы обычных щетинок (например, мягких щетинок), которые выступают обычно. Таким образом, варианты осуществления настоящей системы могут обеспечивать способы взаимодействия с пользователем для изменения жесткости щетинок чистящей головки системы. Хотя пользователи могут предпочитать зубную щетку с жесткими щетинками, благодаря предположению, что она действительно очищает зубы лучше, чем мягкие щетинки, эти жесткие щетинки могут, в перспективе, вызвать повреждение эмали зубов пользователя или десневой области пользователя, если их использовать слишком длительно или с чрезмерным усилием. Соответственно, варианты осуществления настоящей системы могут регулировать выступание жестких щетинок для зацепления жестких щетинок только когда это предлагается посредством пользовательского взаимодействия. Таким образом, пользователь может взаимодействовать с OHD для изменения жесткости щетинок чистящей головки, когда пользователям требуется сделать это, например, когда пользователь желает, чтобы жесткие щетинки могли бы, например, удалять некоторые неподдающиеся органические остатки, налет и т.д.
Кроме того, варианты осуществления настоящей системы могут выполнять способ узнавания захвата, который может использоваться для уверенности в том, что настройки устройства не изменяются, когда пользователь регулирует захват на ручке во время использования. Таким образом, например, если пользователь быстро изменяет положение захвата, устройство может не учитывать любые изменения в обнаруженной силе захвата и/или схеме в течение некоторого временного интервала.
Фиг. 8A представляет вид сбоку с частичным вырезом в перспективе участка системы 800 зубной щетки, имеющей сенсорный в отношении прикосновения (Touch-Sensitive (TS)) корпус 802, согласно вариантам осуществления настоящей системы. TS-корпус 802 может иметь первый конец 820 и второй конец 822, участок 818 для захватывания/захват, расположенный между первым и вторым концами 820, 822, и другие элементы, аналогичные представленным на фиг. 1, например, сенсорные кольца прикосновения 104-1-104-N (в целом 104-x) и/или сенсорный датчик 106 прикосновения (TS) кнопочного типа, представленный на фиг. 1, но для большей ясности исключенные из фиг. 8A, 8B. Однако инструмент 808 TS-корпуса 802 может включать в себя регулируемые щетинки в отличие от неподвижных щетинок инструмента108. В частности, инструмент 808 может включать в себя чистящую головку 814, и может соединяться с TS-корпусом 802. Инструмент 808 может воспринимать двигательную силу (например, силу вращения, силу вибрации и т.д.) от любого подходящего передающего силу элемента, например, стержня 812 исполнительного механизма. Двигательная сила может создаваться любым подходящим источником, например, электронным исполнительным механизмом (ACT) 109, соединенным со стержнем 812 исполнительного механизма, аналогичного описанному, например, в отношении фиг. 1.
Чистящая головка 814 может включать в себя одну или более групп щетинок, по меньшей мере одна из которых может регулироваться по выступанию. Например, первая группа щетинок 850 может включать в себя щетинки первого типа (например, мягкие щетинки), а вторая группа щетинок 852 может включать в себя щетинки второго типа (например, жесткие щетинки). Вторая группа щетинок 852 может управляться для регулирования их выступания относительно наружной стороны чистящей головки 814. Исполнительный механизм 862 щетинок может регулировать положение управляемых щетинок (например, второй группы щетинок 852 в настоящем варианте осуществления) под управлением блока 807 управления (CONT) посредством сигнала, передаваемого по линиям 860 управления для установки управляемых щетинок в обычное положение (например, отведенное положение) при обычном использовании и в выступающее положение при запуске при необходимости щетинок второго типа (см., например, Таблицу 1 для способов запуска). Исполнительный механизм 862 щетинок может включать в себя любой подходящий механизм, например, электроактивный (ионный) полимерный (ЭАП) исполнительный механизм 866, который изменяет свою форму и/или жесткость при помещении под низкое напряжение, например, 1-2 Вольта, обеспеченное из блока 807 управления посредством линии 860 управления. ЭАП- исполнительный механизм 866 может включать в себя пассивный материал, и, таким образом, может быть вставлен в полость 809 инструмента 808 без участия или почти без участия дополнительного электронного или механического механизма. Электронный соединитель 864 может соединять блок 807 управления (расположенный в полости TS-корпуса 802) с ЭАП- исполнительным механизмом 866 посредством, например, линии 860 управления, так что питание (например, напряжение, например, управляющее напряжение) может подаваться на ЭАП-исполнительный механизм 866 как напряжение для запуска, при необходимости, ЭАП-исполнительного механизма 866.
Фиг. 8B - вид сбоку в перспективе с частичным разрезом участка системы 800 зубной щетки с напряжением, приложенным к ЭАП-исполнительному механизму 866 согласно вариантам осуществления настоящей системы. При приложении управляющего напряжения к исполнительному механизму 866, ЭАП-исполнительный механизм 866 изгибается для приложения силы, которая может вызвать дополнительное выступание управляемых щетинок (например, щетинок второй группы 852) из инструмента 808 для обеспечения возможности контакта с требуемой поверхностью (например, зубом пользователя) при работе. Согласно другим вариантам осуществления щетинки второй группы 852 могут включать в себя по меньшей мере один резиновый протир. В других вариантах осуществления для регулирования положения резиновых протиров и/или щетинок также могут использоваться другие подходящие механизмы.
Фиг. 8C - вид в разрезе участка системы 800 зубной щетки, выполненный по линии 8C-8C фиг. 8A, согласно вариантам осуществления настоящей системы. Щетинки второй группы 852 могут соединяться с несущим элементом 867, который, в свою очередь, соединяется с ЭАП-исполнительным механизмом 866 и располагается в полости 809 инструмента 808. По меньшей мере участок полости 809 может ограничиваться одной или более внутренними стенками 875 кромки, которые могут задавать ширину (WC) полости 809. Аналогично, ЭАП-исполнительный механизм 866 и/или несущий элемент 867 может иметь противоположные боковые кромки 890, которые могут задавать высоту (WЭАП) ЭАП-исполнительного механизма 866 и/или несущего элемента 867. Одна или более внутренних стенок 875 кромки может быть выполнена так, что Wc может быть немного больше WЭАП,чтобы боковое отклонение ЭАП- исполнительного механизма 866 и/или несущего элемента 867 относительно полости 809 инструмента 808 могло управляться (например, посредством контакта противоположных боковых кромок 890 с прилегающими внутренними стенками кромки из одной или более внутренних стенок 875 кромки), когда инструмент 808 воспринимает двигательную силу (например, силу вращения, силу вибрации и т.д.) от любого подходящего передающего силу элемента, например, стержня 812 исполнительного механизма, во время использования.
Фиг. 8D - вид в разрезе участка системы 800 зубной щетки, выполненный по линиям 8D-8D фиг. 8C согласно вариантам осуществления настоящей системы. Инструмент 808 может включать в себя корпус 870, имеющий одну или более боковых стенок, которые могут образовывать по меньшей мере часть боковой стороны полости 809 и могут включать в себя один или более проемов 872, через которые могут проходить щетинки второй группы 852. Например, полость 809 может включать в себя внутреннюю боковую стенку 874, которая может быть выполнена с возможностью контакта с соседним участком несущего элемента 867, когда ЭАП -исполнительный механизм 866 изгибается под действием управляющего напряжения, как проиллюстрировано пунктирными линиями. ЭАП-исполнительный механизм 866 может иметь, соответственно, проксимальный и дистальный концы 880 и 878, и может соединяться на проксимальном конце 880 с корпусом 870 инструмента 808, так что проксимальный конец 880 может оставаться неподвижным относительно корпуса 870 при запуске. Соответственно, когда к ЭАП-исполнительному механизму 866 прикладывается управляющее напряжение (например, когда запущен ЭАП-исполнительный механизм), ЭАП-исполнительный механизм 866 изгибается и дистальный 878 конец ЭАП-исполнительного механизма 866 может отклоняться в выступающее положение, как проиллюстрировано пунктирными линиями. Соответственно, управляемые щетинки (например, щетинки второй группы 852), которые соединены с ЭАП-исполнительными механизмами 866 через несущий элемент 867, выталкиваются через одно или более проемов 872 и выступают дальше из инструмента 808, чтобы обеспечить возможность контакта с требуемой поверхностью (например, зубом пользователя) во время работы. Это положение может называться выдвинутым положением. Когда управляющее напряжение больше не прикладывается к ЭАП-исполнительному механизму 866, ЭАП-исполнительный механизм 866 принимает свою обычную форму, как представлено сплошными линиями, и управляемые щетинки (например, щетинки второй группы 852), соединенные с ним, отводятся из своего выдвинутого положения, так, чтобы контакт с требуемой поверхностью (например, зубом пользователя) при работе мог быть уменьшен или полностью исключен. Это положение может быть названо отведенным, или обычным, положением. Таким образом, например, если щетинки второй группы 852 представляют собой жесткие щетинки, контакт между этими щетинками и требуемой поверхностью (например, зубом пользователя) может уменьшаться или полностью исключаться, когда щетинки второй группы 852 не выступают в отведенном положении. Первая группа щетинок 850 может соединяться с корпусом 870 инструмента 808 с использованием любого подходящего способа. Например, проксимальные концы 886 первой группы щетинок 850 могут соединяться с несущим элементом 884 первой группы, который может соединяться с корпусом 870 инструмента 808. Соответственно, первая группа щетинок 850 может проходить через проемы 888, которые могут располагаться в корпусе 870 инструмента 808. Однако в других вариантах осуществления проксимальные концы первой группы щетинок 850 могут соединяться непосредственно с корпусом 870 инструмента 808. Протяженность первой группы щетинок 850 может оставаться постоянной независимо оттого, выступают или отведены щетинки второй группы 852. Однако в других вариантах осуществления по меньшей мере некоторые щетинки первой группы щетинок 850 могут управляться для переменного выступания или отведения аналогично второй группе щетинок 852.
Согласно вариантам осуществления настоящей системы система включает в себя OHD, имеющее корпус с захватом и зубную щетку, соединенную с корпусом. Захват может включать в себя датчик давления, например, чувствительный к силе (FS) датчик давления резистивного типа. Как только зубная щетка включается, блок управления может определить силу, приложенную к датчику давления, на основании выходного сигнала датчика давления (например, аналогового значения сопротивления в настоящих вариантах осуществления). Сигнал силы, выведенный датчиком давления, может представлять собой монотонную функцию от площади и/или давления, приложенного к датчику давления. Кроме того, соответствие силы, приложенной к датчику давления (например, определенной на основании выходного сигнала датчика давления) и требуемой рабочей скорости (например, рабочей частоты колебаний) прикрепленного очищающего инструмента, например, зубной щетки (например, в чистящих движениях в минуту (BSM)) может обеспечиваться и храниться в памяти системы.
Соответствие может устанавливаться/переустанавливаться пользователем с использованием любого подходящего способа, например, обучающего процесса, выполненного согласно вариантам осуществления настоящей системы. Например, во время обучающего процесса пользователь может держать захват OHD свободно и затем постепенно увеличивать силу, которую он прикладывает к захвату, до тех пор, пока он не станет прикладывать сильное, все еще комфортное сжатие к захвату. Датчики давления на захват воспринимают эту силу и формируют соответствующую информацию датчика. Затем эти значения датчиков могут быть преобразованы в единицы силы (например, в ньютоны (Н)), которым соответствует BSM. Эти соответствующие значения могут затем сохраняться в памяти системы для дальнейшего использования согласно настройкам пользователя. соответствующие значения BSM могут быть соотнесены с значениями, выводимыми непосредственно датчиками давления (например, непрерывно, на взаимно-однозначной или линейной основе) или прерывисто (например, на дискретной основе), как рассмотрено ниже. В других вариантах осуществления сигналы, выводимые датчиком(ами) давления, соответствуют BSM, как описано выше, без преобразования в единицы силы. Например, на фиг. 9A представлен график 900A, иллюстрирующий непосредственное или непрерывное (например, взаимно-однозначное) отношение между силой, приложенной к датчику(ам) давления, и значениями BSM согласно вариантам осуществления настоящей системы; и на фиг. 9B представлен график 900B, иллюстрирующий дискретное отношение между силой, приложенной к датчику(ам) давления, и значениями BSM согласно вариантам осуществления настоящей системы. Таким образом, как представлено на фиг. 9A, BSM может соответствовать непосредственно силе, приложенной к датчикам давления захвата, на взаимно-однозначной основе. Таким образом, BSM может быть прямо пропорционально силе, приложенной к захвату. В некоторых вариантах осуществления взаимно-однозначное соответствие не применяется до тех пор, пока воспринятая сила не превысит первое пороговое значение BSM 1.
В других вариантах осуществления, как представлено на фиг. 9B, BSM может соответствовать FSM дискретно. Соответственно, блок управления может регулировать BSM на отдельных интервалах согласно диапазону давлений (например, ʺслабоеʺ, ʺнормальноеʺ и ʺсильноеʺ), оказываемому пользователем на захват, как обнаружено датчиками давления. Например, в некоторых вариантах осуществления информация датчика (SI), относящаяся к силе, приложенной пользователем, может быть получена от TS-датчика, может сравниваться со множеством пороговых значений (например, Пороговое значение 1, Пороговое значение 2, Пороговое значение 3 и Пороговое значение 4. Если определено, что: Пороговое значение 1<=SI<Пороговое значение 2, блок управления может выбрать первое значение BSM (например, BSM1). Однако, если определено, что: Пороговое значение 2<=SI<Пороговое значение 3, блок управления может выбрать второе значение BSM (например, BSM2). Аналогично, если определено, что: Пороговое значение 3<=SI<Пороговое значение 4, блок управления может выбрать третье значение BSM (например, BSM3). Кроме того, если определено, что: Пороговое значение 4<=SI<Пороговое значение 5, блок управления может выбрать четвертое значение BSM (например, BSM4). Соответствия могут быть сохранены в памяти системы в любом подходящем виде, например, в виде таблицы функций (например, Таблицы 1), если требуется.
При работе OHD блок управления может выполнять рабочие этапы, например: определение силы, приложенной к захвату OHD пользователем, и определение значения для BSM на основании определенной силы. Значения для BSM могут быть получены из памяти системы (например, с использованием справочной таблицы). Затем блок управления может управлять исполнительным механизмом согласно определенному значению для BSM. Исполнительный механизм может затем приводить в действие чистящую головку при (или приблизительно при) определенном значении для BSM.
Согласно другим вариантам осуществления настоящей системы обеспечивается OHD, например, очищающее устройство для межзубных промежутков, работающее согласно вариантам осуществления настоящей системы. Одно такое очищающее устройство для межзубных промежутков известно как очищающее устройство для межзубных промежутков (IDCD) Philips™ AirFloss™, которое выдает струю жидкости и/или газа, когда требуется, и им можно управлять для выполнения работы согласно вариантам осуществления настоящей системы. Струя жидкости может включать в себя воду и/или одну или более очищающую текучую среду, например, полоскание для полости рта, полоскание со фтором, абразив и т.д.
Струя жидкости может запускаться согласно вариантам осуществления настоящей системы на основании силы, приложенной к чувствительному к силе (FS) датчику давления (здесь и далее датчик давления), например, представленному в вариантах осуществления на фиг. 1-2. Соответственно, датчик давления может быть встроен в захват устройство типа Airfloss (например, IDCD) и может воспринимать силу, приложенную к ней пользователем и предоставлять указание этой силы (например, как значение сопротивление или другое значение датчика) блоку управления. Блок управления может затем определять силу, приложенную к датчику давления захвата, схему захвата и/или схему приложения силы с течением времени. Затем блок управления может определять соответствующую функцию (например, выбранную из множества функций) для приложения согласно определенной приложенной силе, схеме захвата и/или схеме давления с течением времени согласно настройкам системы и/или пользователя с использованием, например, просмотра таблицы. Затем блок управления может запускать один или более исполнительных механизмов согласно определенной функции.
Соответственно, один или более исполнительных механизмов может нагнетать выбранную жидкость и/или газ согласно определенной функции на инструмент IDCD, например, очищающую головку, которая может затем выводить жидкость и/или газ из одного или более проемов очищающей головки. Таким образом, текучая среда или газ могут быть выведены очищающей головкой согласно функциям на основании определенного давления, схемы захвата и/или схемы давления с течением времени. Это может быть аналогично варианту осуществления на фиг. 1 и 2, и выходной сигнал с датчиков давления может считываться блоком управления. Блок управления может затем сравнить значение информации датчика от датчиков давления с пороговым значением давления, и если определено, что значение информации датчика больше порогового значения (например, указывающего сжимающее действие пользователя), блок управления может управлять исполнительным механизмом IDCD для подачи жидкости под давлением на очищающую головку.
Альтернативно, размер проемов в очищающей головке может быть различным для изменения скорости выхода жидкости и/или газа, при этом меньший проем приводит к более быстрому выходу (при условии аналогичного давления от нагнетания). Может обеспечиваться исполнительный механизм или двигатель для открытия и закрытия проемов в чистящей головке, отдельно или вместе, например, посредством перемещения крышки над проемами в очищающей головке для открывания и закрывания проемов, что приводит к изменению скорости вывода жидкости и/или газа. Соответственно, жидкость и/или газ может выводиться очищающей головкой в виде одной или более струй жидкости/газа, включающих в себя микрокапли воды. Однако, если определено, что значение информации датчика меньше или равно пороговому значению, блок управления может не выполнять никакого действия, если требуется.
Фиг. 10 - вид спереди в перспективе участка системы 1000 IDCD (здесь и далее для ясности системы 1000), имеющей сенсорный в отношении прикосновения корпус 1002 согласно вариантам осуществления настоящей системы. Система 1000 IDCD может быть аналогична системе 100 зубной щетки, представленной на фиг. 1, и может включать в себя инструмент 1008 для очистки, соединенный с корпусом 1002. Сенсорный корпус 1002 может иметь, соответственно, первый и второй концы 1020 и 1022, захват 1018, расположенный, соответственно, между первым и вторым концами 1020 и 1022, и один или более сенсорных датчиков, расположенных на захвате. Сенсорные датчики прикосновения (TS) могут включать в себя любую подходящую сенсорную воспринимающую конструкцию, например, сенсорные кольца 1004-1-1004-N (в целом 1004-x) и/или кольцевой TS-датчик 1006. Сенсорные датчики могут быть аналогичны работе TS-датчикам 104-x и 106, описанным в отношении фиг. 1, и могут передавать информацию, связанную с силой, приложенной к блоку управления системы, например, блоку 1007 управления, который может представлять собой процессор, например, микропроцессор μp.
Что касается инструмента 1008, этот инструмент может включать в себя очищающую головку 1014, например, очищающую головку типа AirFloss™, носик для жидкости/воды или тому подобное, выполненный с возможностью выбрасывать жидкость и/или газ в виде струи (например, водной и/или воздушной струи) с заданной силой из по меньшей мере одного проема 1009 очищающей головки 1014. Проем 1009 может быть сообщаться (например, с помощью канала 1012) с одним или более исполнительными механизмами, например, одним или более насосами, расположенными в корпусе, которые могут нагнетать жидкость(и) и/или газ под управлением блока 1007 управления. Насосы могут включать в себя любой подходящий насос, например, вращательный, возвратно-поступательный, пьезонасос или тому подобное. Один или более насосов могут принимать жидкость от любого подходящего источника, например, шланга или резервуара (Res) 1091, сообщающегося с ним. В некоторых вариантах осуществления очищающая головка 1014 может включать в себя одну или более щеток. Одна или более щеток могут выдвигаться или отводиться под управлением блока управления и согласно давлению, приложенному к захвату 1018 и воспринятому датчиками (1004-x и/или 1006) давления. В некоторых вариантах осуществления инструмент может включать в себя, при необходимости, чистящую головку. Кроме того, затем может обеспечиваться исполнительный механизм для приведения в действие инструмента, чтобы инструмент можно быть привести в действие в требуемом направлении(ях) и/или с требуемой частотой (например, в движениях щетки в минуту (BPM)).
Фиг. 11 - вид спереди в перспективе участка системы 1100 IDCD, имеющей сенсорный в отношении прикосновения (TS) корпус 1102 согласно другим вариантам осуществления настоящей системы. Система 1100 IDCD аналогична системе 1000 IDCD и включает в себя корпус 1102, сенсорное кольцо 1104, и инструмент 1108, аналогичные, соответственно, корпусу 1002, сенсорному кольцу 1004 (или 1004-x) и инструменту 1008 системы 1000 IDCD. Однако сенсорное кольцо 1104 проходит вдоль большей части длины ручечного участка 1118 корпуса 1102. Соответственно, сенсорное кольцо 1104 может проходить вдоль большей части длины продольной оси (LA) корпуса 1102.
Далее рассмотрен способ работы OHD со ссылкой на фиг. 12, который является схемой последовательности действий, иллюстрирующей процесс 1200, выполняемый системой согласно вариантам осуществления настоящей системы. Процесс 1200 может выполняться с использованием одного или более блоков управления, процессоров или компьютеров, взаимодействующих через сеть, и может получать информацию от, например, блока 107 управления, представленного на фиг. 1, например, и/или сохранять информацию в одну или более память, которые могут быть местными и/или удаленными друг от друга и соединенными с процессором, или, например, блоком 107 управления. Процесс 1200 может включать в себя один или более из следующих этапов. Кроме того, один или более из этих этапов могут объединяться и/или разделяться на подэтапы, если требуется. Кроме того, один или более из этих этапов может быть пропущен в зависимости от настроек. При работе процесс может начинаться на этапе 1201 и затем продолжаться на этапе 1203.
На этапе 1203 процесс может получать информацию датчика от по меньшей мере одного чувствительного к силе (FS) датчика участка для захватывания корпусного участка. Информация датчика может включать в себя аналоговую и/или цифровую информацию, относящуюся по меньшей мере к одному значению силы, приложенной к указанному по меньшей мере одному FS-датчику, например, пользователем. Например, в некоторых вариантах осуществления FS-информация может включать в себя информацию, относящуюся к области или зоне, на которой приложена сила. В некоторых вариантах осуществления указанный FS-датчик представляет собой резистивный FS-датчик, который может выводить сопротивление (значение(я) сопротивления) в качестве информации датчика. Сопротивление может соответствовать силе, приложенной к FS-датчику. Однако в других вариантах осуществления предусмотрено, что FS-датчик представляет собой емкостной FS-датчик, который может выводить емкость (значение(я) емкости) в качестве информации датчика. Емкость может соответствовать силе, приложенной к FS-датчику. После завершения этапа 1203 процесс может продолжиться на этапе 1205.
На этапе 1205 процесс, например, процессор или блок 107 управления, может определить и/или выбрать функцию для применения согласно информации датчика. Соответственно, процесс может устанавливать соответствие между информацией датчика и информацией выбора функции, хранящейся в памяти системы, например, в таблице выбора функции. В некоторых вариантах осуществления информация выбора функции может включать в себя информацию, относящуюся к одному или более пороговым значениям и/или схемам, с которыми надлежит сравнить информацию датчика, и может включать в себя соответствующие функции для применения (например, к исполнительным механизмам, переключателям и т.д.) на основании результатов сравнения(й). Как только процессор определяет функцию для применения, осуществляется управлением соответствующими исполнительными механизмами соответствующим образом, например, для управления чистящими движениями осуществляется управление первым исполнительным механизмом; для управления потоком текучей среды осуществляется управление вторым исполнительным механизмом (например, насосом); и для управления продолжительностью чистки осуществляется управление третьим исполнительным механизмом (например, ЭАП-исполнительным механизмом). После завершения этапа 1205 процесс может продолжаться на этапе 1207.
На этапе 1207, процесс, например, процессор или блок 107 управления, может применять определенные/выбранные функции. Соответственно, процессор может управлять или иным образом запускать один или более (выбранных) исполнительных механизмов согласно выбранной функции(ям). После завершения этапа 1207 процессор может повторить этап 1203 для непрерывного управления OHD согласно вводу пользователя или может завершиться, если требуется.
Дополнительные и/или отличные этапы работы могут выполняться процессором или блоком 107 управления для управления работой системы 800 зубной щетки, представленной на фиг. 8A, 8B, имеющей две группы щетинок 850, 852. В частности, на этапе 1207 блок 107 управления управляет первым исполнительным механизмом согласно выбранной функции, при этом первый исполнительный механизм является тем же исполнительным механизмом (109), что описан в отношении фиг 1, 8A, 8B. Кроме того, на этапе 1210 блок 107 управления получает дополнительную информацию датчика, генерируемую сенсорным датчиком, при этом дополнительная информация датчика соответствует силе, приложенной пользователем к поверхности сенсорного датчика во второй раз. Затем, на этапе 1212 блок 107 управления определяет, является ли информация второго датчика большей или равной пороговому значению; и затем, на этапе 1214 блок 107 управления запускает второй исполнительный механизм 862 для выдвижения одной из первой и второй щеток 850, 852 относительно другой из первой и второй щеток 850, 852, когда определено на этапе определения, что информация второго датчика больше или равна пороговому значению.
На фиг. 13 представлен участок системы 1300 согласно вариантам осуществления настоящей системы. Например, участок настоящей системы 1300 может включать в себя процессор 1310 (например, блок управления), функционально соединенный с памятью 1320, пользовательским интерфейсом (UI) 1330, участком 1370 пользовательского ввода. Память 1320 может представлять собой любой тип устройства для хранения прикладных данных, а также других данных, связанных с описанной работой). Прикладные данные и другие данные принимаются процессором 1310 для конфигурирования (например, программирования) процессора 1310 для выполнения этапов работы согласно настоящей системе. Процессор 1310, конфигурированный таким образом, становится специализированным устройством, особенно подходящим для функционирования согласно вариантам осуществления настоящей системы.
Этапы работы могут включать в себя конфигурирование системы 1300, например, путем конфигурирования процессора 1310 для получения информации от пользовательских вводов, например, от участка 1370 пользовательского ввода и/или памяти 1320, и обработки этой информации согласно вариантам осуществления настоящей системы для определения функции для применения и/или исполнительного механизма(ов), которые должны управляться согласно соответствующей функции согласно вариантам осуществления настоящей системы. Участок 1370 пользовательского ввода может включать в себя чувствительные к силе (сенсорные) датчики, клавиатуру, мышь, шаровой манипулятор и/или другое устройство, в том числе сенсорные дисплеи, которое может быть автономным или являться частью системы, например, частью OHD, персонального компьютера, ноутбука, нетбука, планшета, смартфона, персонального цифрового секретаря (PDA), мобильного телефона и/или другого устройства для взаимодействия с процессором 1310 посредством любого функционирующего соединения. Участок 1370 пользовательского ввода может быть выполнен с возможностью взаимодействия с процессором 1310, включающим в себя обеспечение взаимодействия в UI, как описано в настоящем документе. Очевидно, процессор 1310, память 1320, UI 1330 и/или участок 1370 пользовательского ввода могут все вместе или частично представлять собой участок компьютерной системы или другое устройство, например, клиентскую и/или сервер, как описано в настоящем документе.
Процессор 1310 может передавать информацию на UI 1330, например, на дисплей системы (например, дисплей с графическими возможностями, светодиоды (LED), жидкокристаллический дисплей (LCD) и т.д.)
Способы настоящей системы особенно подходят для выполнения процессором, запрограммированным компьютерной программой, такая программа содержит модули, соответствующие одному или более из отдельных этапов или действий, описанных и/или предусмотренных системой по настоящему изобретению.
Процессор 1310 выполнен с возможностью обеспечения управляющих сигналов и/или выполнения операций в ответ на входные сигналы от участка 1370 пользовательского ввода, а также в ответ на другие устройства сети и выполнения инструкций, хранящихся в памяти 1320. Например, процессоры 1310 могут получать информацию обратной связи от датчиков обратной связи и могут обрабатывать эту информацию для определения силы, приложенной к очищающему инструменту, если необходимо. Процессор 1310 может включать в себя одно или более из микропроцессора, специализированной или общей интегральной схемы (схем), логического устройства и т.д. Кроме того, процессор 1310 может представлять собой специализированный процессор для выполнения согласно системе по настоящему изобретению или может представлять собой процессор общего назначения, у которого только одна из множества функций предназначена для выполнения согласно системе по настоящему изобретению. Процессор 1310 может работать с использованием программного участка, множества программных сегментов или может представлять собой аппаратное устройство, использующее целевую или многоцелевую интегральную схему.
Соответственно, для оптимального опыта очистки варианты осуществления настоящей системы могут обеспечивать пользователям возможностью управления различными функциями устройства для поддержания здоровья полости рта, например, электронной зубной щетки и/или устройства для очистки межзубных промежутков. Например, варианты осуществления настоящей системы могут обеспечивать пользователю управление скоростью электронной зубной щетки и/или струи воды, выбрасываемой из автоматического устройства для очистки межзубных промежутков (например, устройства типа Airfloss™). То, что оптимально для пользователя, может зависеть от различных факторов, например: требуемой эффективности, личных предпочтений, объема загрязнения, чувствительности, болевого порога, промежутка между зубами и т.д. Соответственно, пользователь может устанавливать соответствие между функциями и силой захвата, схемами и т. д.
Соответственно, варианты осуществления настоящей системы обеспечивают системы, устройства и способы, которые могут обеспечить пользователям возможность легкого управления рабочими параметрами устройства для поддержания здоровья полости рта. Например, вместо того чтобы нажимать кнопки на корпусе зубной щетки для выбора рабочего режима, пользователь может легко выполнять управление для выбора различных функций электронной зубной щетки или устройства для очистки межзубных промежутков, работающего согласно вариантам осуществления настоящей системы посредством, например, регулирования давления (например, посредством большего или меньшего сжатия захвата) на чувствительный к давлению захват электронной зубной щетки или устройства для очистки межзубных промежутков. Чувствительный к давлению захват может быть сжат во время использования для выбора функций, например, впрыска воздуха или применения более жестких щетинок для удаления некоторых неподдающихся органических остатков и т.д., что может быть желательно в различные моменты времени во время работы по очистке. За счет обеспечения сенсорного захвата пользователю не нужно добиваться визуального контакта с корпусом зубной щетки или устройства для очистки межзубных промежутков, чтобы видеть место нажатия для выбора функции. Кроме того, захват электронной зубной щетки или устройства для очистки межзубных промежутков может иметь гладкую поверхность без физических кнопок, что упрощает очистку электронной зубной щетки или устройства для очистки межзубных промежутков и делает его более гигиеничным.
Хотя настоящее изобретение представлено и описано со ссылкой на конкретные примерные варианты осуществления, специалистам в данной области техники понятно, что настоящее изобретение этим не ограничивается и что различные изменения в виде и подробностях, включающие в себя сочетание различных элементов и вариантов осуществления, могут быть в нем сделаны без отступления за пределы сущности и объема изобретения. Например, вместо зубной щетки или устройства для очистки полости рта система по настоящему изобретению в равной степени применима к изделиям, используемым стоматологами, например, бормашине и/или оптическoй камере или просмотровому прибору для диагностики и т.д. Дополнительные варианты настоящей системы очевидны для специалиста в данной области техники и охватываются нижеприведенной формулой.
Наконец, рассмотренное выше предназначено просто для иллюстрации настоящей системы и не должно истолковываться как ограничивающее приложенную формулу для любого конкретного варианта осуществления или группы вариантов осуществления. Таким образом, хотя система по настоящему изобретению описана со ссылкой на примерные варианты осуществления, следует также понимать, что множество модификаций и альтернативных вариантов осуществления может быть разработано специалистами в данной области техники без выхода за пределы широкого толкования смысла и объема настоящей системы в том виде, как она изложена в нижеприведенной формуле. Кроме того, заголовки разделов, включенные в настоящий документ, предназначены для облегчения восприятия и не предназначены для ограничения объема настоящей системы. Соответственно, описание и чертежи должны рассматриваться с иллюстративной точки зрения и не предназначены для ограничения объема приложенной формулы.
Заголовки разделов, включенные в настоящий документ, предназначены для облегчения восприятия и не предназначены для ограничения объема настоящей системы. Соответственно, описание и чертежи должны рассматриваться с иллюстративной точки зрения и не предназначены для ограничения объема приложенной формулы.
При интерпретации приложенной формулы следует понимать, что:
a) слово "содержащий" не исключает наличия других элементов или этапов помимо перечисленных в данном пункте формулы;
b) единственное число элемента не исключает наличия множества таких элементов;
c) любые ссылочные символы в формуле не ограничивают ее объема;
d) несколько "средств" могут быть представлены одним элементом, или аппаратно- или программно реализуемой структурой или функцией;
e) любой из раскрытых элементов может быть составлен из аппаратных участков (например, включающих в себя дискретную и интегральную электронную схему), программных участков (например, компьютерных программ) и любых их сочетаний;
f) аппаратные участки могут включать в себя аналоговые и/или цифровые участки;
g) любые из раскрытых устройств или их участков могут сочетаться вместе или отдельно в дополнительные участки, если иное специально не указано;
h) никакая конкретная последовательность действий или этапов не является обязательной, если только иное не указано специально; и
i) термин "множество" в отношении элемента включает в себя два или более из заявляемых элементов и не подразумевает никакого конкретного диапазона для числа элементов; то есть множество элементов может составлять всего два элементов, а может включать в себя безграничное число элементов.
Реферат
Предложено устройство для очистки полости рта, включающее корпусный участок (802), имеющий первый и второй концы (820, 822), и участок для захватывания, расположенный между первым и вторым концами; инструмент (808) для очистки полости рта, соединенный с первым концом и включающий головку (814) зубной щетки, имеющую первую и вторую группы щетинок (850, 852) различной жесткости. Вторая группа щетинок имеет регулируемое удлинение. Исполнительный механизм (862) соединен со второй группой щетинок (852) и выполнен с возможностью управления удлинением второй группы щетинок (852) относительно первой группы щетинок (850). По меньшей мере один сенсорный датчик (104, 106) прикосновения установлен на корпусном участке и выдает значение датчика, указывающее приложенную к нему силу. Кроме того, блок (807) управления может быть выполнен с возможностью сравнения значения датчика с пороговым значением и запуска исполнительного механизма (862) для выдвижения второй группы щетинок относительно первой группы щетинок на основании результатов определения. 2 н. и 12 з.п. ф-лы, 13 ил., 1 табл.
Комментарии