Силовой джойстик - RU192186U1
Код документа: RU192186U1
Чертежи

Описание
Заявленная полезная модель относится к устройствам ввода данных, которые применяются также для ручного управления виртуальными или реальными объектами, с различными целями, например, использование джойстика для управления компьютерными играми, для прямого или дистанционного управления приборами и механизмами, и другое. Заявленная полезная модель применима в сфере медицинской реабилитации, где устройства ввода, в том числе, связанные с роботизированными комплексами, применяются для коррекции двигательных нарушений. Общая характеристика области техники: ручные устройства, ручные манипуляторы, с помощью которых осуществляется целенаправленная деятельность по управлению какими-либо объектами с различными целями, включая ввод информации разного характера.
К одним из наиболее распространенных устройств ввода сегодня относится пара «клавиатура и мышь», имеющие собственные достоинства и недостатки (Володин К.И., Беляков М.О. Перспективы развития современных устройств ввода. Современные информационные технологии. 2013. №17. С. 261-264.). Применяется для ввода текста и рисунков, для управления виртуальными и реальными объектами. Также для ручного управления используются различного типа датчики угловых отклонений управляющей рукояти от нулевого положения, основанные на разных принципах, используются, например, энкодеры (например: Кондратьев Н.О., Кузнецов К.А., Трубин В.Г. Устройство ввода информации на базе механического инкрементального энкодера EC11. Автоматика и программная инженерия. 2017. №2 (20). С. 39-45). Широко распространенными устройствами являются «джойстики» - качающаяся в нескольких плоскостях вертикальная ручка или варианты (например: US 6429849 B1; US 4587510 A; US 5516105 A). Перспективные устройства управления робототехникой, экзоскелетами, могут включать силовые датчики, в том числе для организации искусственных тактильных обратных связей типа «haptic feedback)), применяющиеся в целях восстановления нормальной двигательной функции или обучения (например: Maddahi Y, Zareinia K, Tomanek В, Sutherland GR. Challenges in developing a magnetic resonance-compatible haptic hand-controller for neurosurgical training. Proc Inst Mech Eng H. 2018 Oct 24:954411918806934. doi: 10.1177/0954411918806934) и контроля техники (например: Европейское космическое агентство. Driving a robot from Space Station. URL:http://www.esa.int/Our_Activities/Space_Engineering_Technology/Driving_ a_robot_from_Space_Station (дата обращения: 31.10.2018).
В сфере медицинской реабилитации, применяются устройства ввода, в том числе, связанные с роботизированными комплексами, которые применяются для коррекции двигательных нарушений (



К силовым устройствам ввода можно отнести устройства, регистрирующие движение общего центра давления на поверхность - силовые платформы, например: RU 14468, RU 86862. Известен вариант, при котором регистрируется сигнал от перемещения общего центра давления стоящего на силовой платформе человека, оцифровывается, и затем преобразуется в аналоговый сигнал. Далее этот аналоговый сигнал подается в общий порт любого персонального компьютера и может использоваться «для управления любым существующим программным обеспечением, которое включает использование стандартного джойстика» - US 6225977 В1. Существует способ оценки опорной функции верхних конечностей (RU 2405430), при котором «верхнюю часть тела пациента размещают над платформой стабилографа так, чтобы руки пациента были опущены вниз под прямым углом к телу, выпрямлены в локтевых суставах. Основания ладоней располагают у ограничительной черты платформы, пальцы выпрямлены, указательный палец располагают параллельно лучу платформы. Пациент удерживает указанную позу и осуществляет давление руками на платформу стабилографа». В процессе выполнения данного способа рассчитывают различные показатели («площадь статокинезиограммы, частоту перемещений центра давления»), которые используются для оценки состояния.
Наиболее близким аналогом заявленного устройство может быть выбран тренажер-джойстик для занятий по разработке нарушенных движений рук у больных неврологической клиники (см. RU 167667 U1, опубл. 10.01.2017). Полезная модель «Тренажер-джойстик для занятий по разработке нарушенных движений рук у больных неврологической клиники» относится к медицине, к разделу неврологии и нейропсихологии и может найти применение в отделениях нейрореабилитации неврологических и нейрохирургических клиник при проведении занятий по восстановлению нарушенных движений рук у больных неврологической клиники с органическими поражениями головного мозга различной этиологии. Создан тренажер-джойстик для занятий по разработке нарушенных движений рук у больных неврологической клиники, содержащий основание, на котором посредством шарового шарнира, электрически соединенного с контроллером оси, закреплена ручка и ряд управляющих кнопок, соединенных электрически с контроллером. При этом основание выполнено из пластика размером 20-35×20-35 см, на котором посредством шарового шарнира подвижно закреплена вертикальная цилиндрическая пластиковая ручка, имеющая высоту 12-16 см, а диаметр 2-3 см, к верхней части которой жестко прикреплена металлическая скоба с жестко прикрепленной к ней горизонтальной ручкой. Внутри вертикальной ручки концентрично размещены цилиндрические металлические трубки в количестве 3-4, жестко зафиксированные относительно друг друга посредством зажимов и телескопически соединенные между собой с возможностью последовательного их развертывания. Причем их диаметр и высота ограничены диаметром и высотой вертикальной ручки. В нижней части вертикальной ручки размещена горизонтальная площадка круглой формы. А к боковой стороне вертикальной ручки и верхней стороне горизонтальной ручки прикреплены ленты-держатели, выполненные из прорезиненной ткани. На верхней поверхности основания, слева и справа от вертикальной и горизонтальной ручек, симметрично размещены управляющие кнопки. Полезная модель обеспечивает повышение эффективности разработки нарушенных движений руки у больных неврологической клиники, обеспечиваемое за счет конструктивных элементов устройства, позволяющего включить процесс движения в интересную и привлекательную для больного деятельность, с постепенным повышением сложности и разнообразия выполняемых рукой движений и обеспечения возможности осуществления самостоятельных занятий больных в домашних условиях.
В отличие от описываемых выше устройств, впервые предлагается специализированное устройство ввода, которое крепится к силовой платформе и позволяет осуществлять управление непосредственно перемещениями общего центра давления на платформу усилием развиваемым кистью руки человека, для различных целей. При этом указанное устройство позволяет осуществлять управление различными виртуальными и физическими объектами путем варьирования величины усилий, развиваемых кистью руки человека.
Техническим результатом заявленной полезной модели является обеспечение возможности управления виртуальными и физическими объектами путем варьирования величины усилий, развиваемых кистью руки человека.
Технический результат достигается за счет создания силового джойстика, выполненного путем закрепления на опорной поверхности силовой платформы, реализующей алгоритм определения координат общего центра давления, рычага-рукояти, состоящего из элемента крепления его к поверхности платформы, например, вакуумной присоски, в верхней центральной части которой размещен рычаг управления ею, выполненный с выемками для размещения пальцев пользователя, и непосредственно рукояти, имеющей насечки и выемки для пальцев рук пользователя, обеспечивающие удобство захвата ее кистью руки пользователя для приложения заданной управляющей нагрузки к силовой платформе.
Заявленная полезная модель проиллюстрирована следующими фигурами:
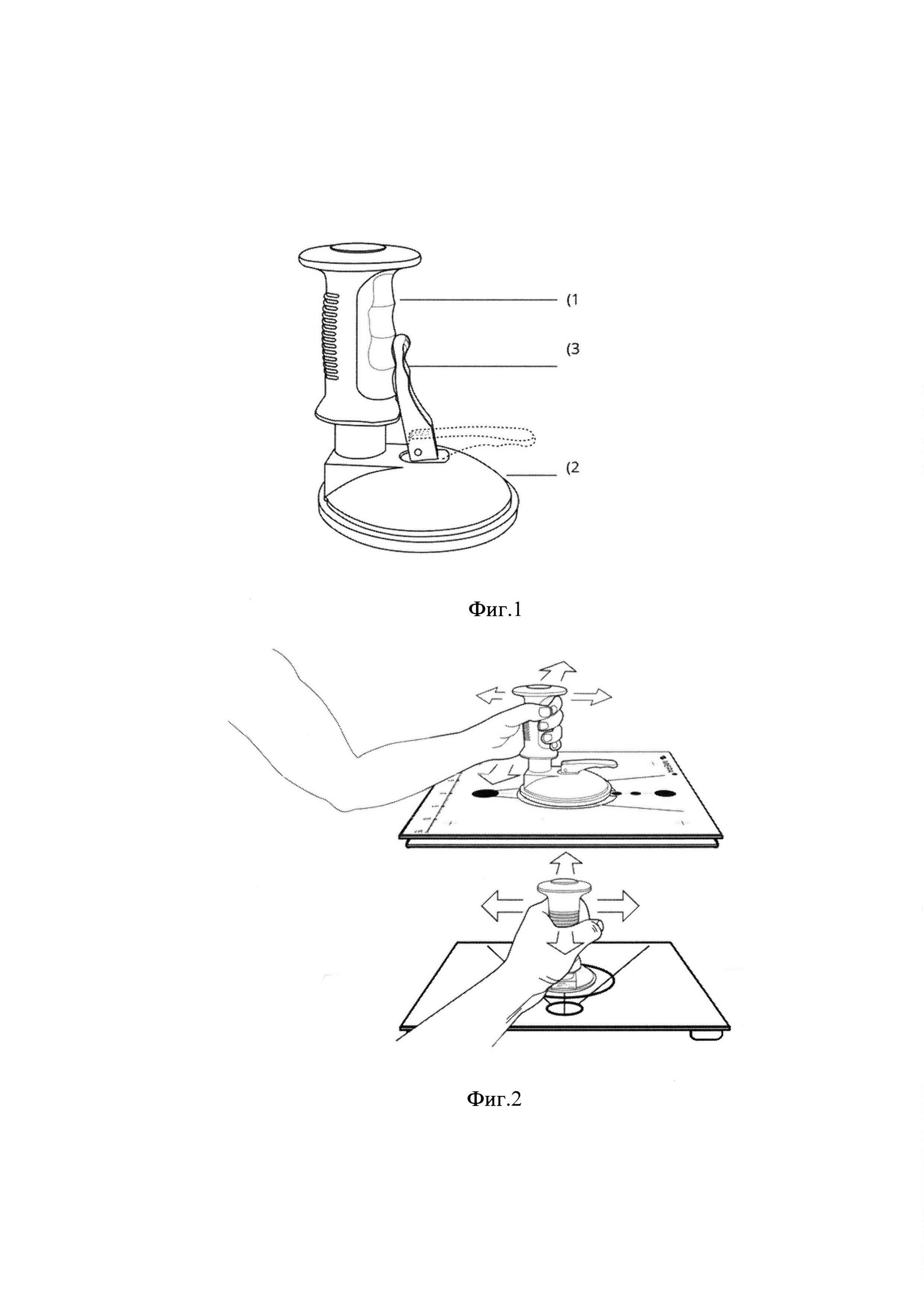
Фиг. 1 - общая схема устройства;
Фиг. 2 - применение силового джойстика;
Фиг. 3 - серийные силовые платформы, для прикрепления съемного силового джойстика, вид сверху (варианты исполнения силовых платформ, пример);
Фиг. 4 - экраны оператора (слева) и испытуемого (справа) для теста «Динамическая проба», реализуемого в программе STPL (Кубряк О.В., Гроховский С.С., Доброродный А.В. Исследование опорных реакций человека (постурография, стабилометрия) и биологическая обратная связь в программе STPL. / Мера-ТСП. Москва. 2018. 121 с. ISBN: 978-5-6040686-0-1) с помощью силового джойстика.
На фиг. 1:
1 - рукоять;
2 - вакуумная присоска;
3 - рычаг управления вакуумной присоской.
Силовой джойстик выполнен путем закрепления на опорной поверхности силовой платформы, реализующей алгоритм определения координат общего центра давления, рычага-рукояти, состоящего из элемента крепления его к поверхности платформы, например, вакуумной присоски, в верхней центральной части которой размещен рычаг управления ею, выполненный с выемками для размещения пальцев пользователя, и непосредственно рукояти, имеющей насечки и выемки для пальцев рук пользователя, обеспечивающие удобство захвата ее кистью руки пользователя для приложения заданной управляющей нагрузки к силовой платформе. Рычаг-рукоять может крепиться к силовой платформе (стабилоплатформе, стабилографу, постурографу) постоянным или съемным способом. Вариант съемного силового джойстика представлен на Фиг. 1.
Пользователь захватывает кистью руки рукоять устройства и создает требуемые для управления виртуальным или реальным объектом, или для какого-либо тренинга, или для диагностики, крутящие моменты, которые изменяют величины реакций опоры, регистрируемые силовой платформой - Фиг 2. Сигналы платформы, преобразуемые с помощью специального программного обеспечения (например, RU 2013610968) реализуют алгоритм выбранного тренинга с искусственной обратной связью по опорной реакции, управление каким-либо объектом или же используются для реализации диагностических процедур, подобно RU 2405430 или подобно различным тестам, описанным для RU 2013610968 (Кубряк О.В., Гроховский С.С, Доброродный А.В. Исследование опорных реакций человека (постурография, стабилометрия) и биологическая обратная связь в программе STPL. / Мера-ТСП. Москва. 2018. 121 с. ISBN: 978-5-6040686-0-1).
программе STPL. / Мера-ТСП. Москва. 2018. 121 с. ISBN: 978-5-6040686-0-1) с помощью силового джойстика.
Силовой джойстик (съемный вариант) может применяться, например, с устройствами типа ST-150 (Устройство электронное «СТАБИЛОТРЕНАЖЕР» ST-150 по ТУ 9441-005-49290937-2009, производства ООО Мера-ТСП, Россия; Регистрационный номер медицинского изделия ФСР 2010/07900; Свидетельство об утверждении типа средств измерений RU.C.39.004.A N 41201) - Фиг. 3.
Примером применения силового джойстика может служить выполнение теста «Динамическая проба» в программе STPL (Кубряк О.В., Гроховский С.С., Доброродный А.В. Исследование опорных реакций человека (постурография, стабилометрия) и биологическая обратная связь в программе STPL. / Мера-ТСП. Москва. 2018. 121 с. ISBN: 978-5-6040686-0-1) Этот тест представляет собой однофазную пробу на способность испытуемого совершать по инструкции нацеленные движения в условиях, задаваемых по зрительному каналу биологической обратной связи. Процедура: по периферии центральной красной круглой мишени в случайном порядке появляются синие круглые мишени меньшего размера - испытуемый, управляя положением общего центра давления на платформу, должен навести метку из центра на появившуюся периферическую мишень, дождаться ее исчезновения и вернуться обратно в центр. По итогам теста рассчитываются среднее время отработки одной «мишени», число отработанных «мишеней» или иные показатели. Вариант трактовки результатов при проведении этого теста в какой-либо группе испытуемых: выявление наиболее и наименее «успешных» для количественной оценки управления в данном тесте, что может отражать координационные способности испытуемых, их когнитивные особенности (например, индивидуальный способ наведения метки общего центра давления на «мишень» - стратегию управления). При изменении чувствительности силовой платформы, силовой джойстик может применяться в качестве своеобразного «силомера» - например, при 10 попытках нажатия на него засчитывать только те, при которых была развита установленная условиями сила.
Аналогичным образом, как для управления в вышеописанном тесте, может осуществляться управление другими виртуальными или реальными объектами.
Реферат
Заявленная полезная модель относится к устройствам ввода данных, которые применяются также для ручного управления виртуальными или реальными объектами, с различными целями, например, использование джойстика для управления компьютерными играми, для прямого или дистанционного управления приборами и механизмами. Силовой джойстик выполнен с возможностью крепления к силовой платформе, реализующей алгоритм выбранного тренинга с искусственной обратной связью по опорной реакции, состоит из вакуумной присоски, имеющий сферическую форму, в верхней центральной части которой размещен рычаг управления присоской, выполненный с выемками для размещения пальцев пользователя, на вакуумной присоске также размещена рукоять, имеющая насечки и выемки для пальцев рук пользователя, обеспечивающие равномерное распределение прикладываемой нагрузки на силовую платформу. Техническим результатом заявленной полезной модели является обеспечение равномерного распределения прикладываемой нагрузки на силовую платформу. 4 ил.
Комментарии