Слежение за положением для системы обработки волос - RU2745622C2
Код документа: RU2745622C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству слежения за положением для автоматизированной системы обработки волос и к автоматизированной системе обработки волос. Изобретение относится также к способу приведения в действие автоматизированной системы обработки волос и к соответствующей компьютерной программе.
Используемое в данном документе выражение «автоматизированная обработка волос» (или укладка волос) относится в частности к подходу, который включает обработку, в частности стрижку, волос субъекта электрическим устройством, которое способно автоматически регулировать по меньшей мере один рабочий параметр, в частности длину стрижки, в зависимости от реального положения обрабатывающего электрического устройства относительно каждого конкретного субъекта. Автоматизированная обработка посредством укладки волос может также называться автоматической, полуавтоматической или интеллектуальной обработкой посредством укладки волос.
Термин «автоматизированная обработка посредством укладки волос» необязательно исключает всякое участие человека или ручное вмешательство. Например, могут быть использованы ручные и управляемые вручную электрические устройства для стрижки волос, которые осуществляют автоматизированную регулировку реальной длины стрижки. А значит автоматизированная укладка волос в контексте настоящего изобретения может также называться компьютеризированной или выполняемой с помощью компьютера интеллектуальной укладкой волос. Вычислительная мощность может быть обеспечена посредством самого электрического устройства для обработки волос или посредством другого устройства, которое связано с ним, такого как мобильный телефон, планшетный компьютер и др.
Уровень техники
Стрижка и укладка волос представляют собой в значительной степени ручные операции, которые обычно требуют квалифицированного и опытного работника (стилиста, парикмахера и др.), который выполняет операцию стрижки и/или укладки волос у клиента. Как правило, даже если клиент удовлетворен конкретной стрижкой или укладкой волос, ручную операцию необходимо осуществлять повторно, например, каждые четыре-восемь недель для относительно коротких стрижек волос. Кроме того, даже опытный парикмахер или стилист не всегда может точно воспроизвести конкретную стрижку. С одной стороны, парикмахер может составить представление об используемой стрижке на основе существующего (выросшего) состояния волос. С другой стороны, парикмахер может припомнить и мысленно представить себе первоначально обработанное состояние ранее выполненной стрижки. Кроме того, клиент может выбрать и запросить конкретную стрижку указывая на визуальное изображение его/ее самого или других людей, носящих модельную стрижку.
Было несколько попыток создать интеллектуальные электрические устройства для стрижки волос, которые позволяют пользователю подстригать его/ее волосы или волосы другого субъекта с поддержкой и управлением от вычислительной машины. С этой целью может быть предложено электрическое устройство для стрижки волос, которое выполнено с возможностью регулирования данной длины стрижки в зависимости от конкретного положения на голове обрабатываемого субъекта. Другими словами, требуемая стрижка хранится в вычислительном устройстве, которое приспособлено для приведения в действие электрического устройства для стрижки волос соответствующим образом, например, посредством регулирования подвижной промежуточной гребенки. Это в принципе требует, чтобы модель стрижки уже хранилась в вычислительном устройстве. Предложено записывать машинные параметры электрического устройства для стрижки волос во время реального выполнения стрижки, так что процесс стрижки волос в дальнейшем может быть повторен.
В связи с этим WO 2013/163999 А1 раскрывает программируемую систему стрижки волос, содержащую устройство для стрижки волос, причем упомянутая система стрижки волос приспособлена для определения, посредством электромагнитной системы слежения, положения упомянутого устройства для стрижки волос относительно головы субъекта, на которой выполняется стрижка волос; установления связи упомянутого положения с ранее полученными данными профиля длины волос относительно требуемой длины стрижки в разных положениях; и автоматического и динамического регулирования длины стрижки волос упомянутого устройства для стрижки волос в соответствии с его настоящим положением и упомянутыми данными профиля длины волос.
Существует еще конкретная потребность в усовершенствованиях и в альтернативных подходах к автоматизированной обработке стрижки/укладки. В частности, определение и слеживание за положением сталкивается с серьезными проблемами. Поскольку объектом процесса обработки волос обычно является голова человека, необходимо определять положение электрического устройства для обработки волос с достаточной точностью и сопоставлять информацию, описывающую планируемую операцию обработки волос (например, модель топологии волос/профиль длины волос) с реальной формой головы/черепа.
Таким образом, еще существуют возможности для усовершенствования в автоматизированных электрических устройствах и способах записи стрижки волос.
Сущность изобретения
Задачей настоящего изобретения является создание устройства слежения за положением для автоматизированной системы обработки волос, автоматизированной системы обработки волос и соответствующего способа приведения в действие автоматизированной системы обработки волос, которые решают по меньшей мере некоторые из вышеупомянутых проблем.
В частности, необходимы усовершенствования в слежение за положением. Предпочтительно, варианты осуществления в соответствии с настоящим изобретением обеспечивают надежное и точное определение и слежение за положением электрического устройства для обработки волос относительно головы/черепа обрабатываемого субъекта (волосы которого подвергаются обработке).
Кроме того, желательно обеспечить более надежные и менее подверженные ошибкам подходы к слежению за положением, которые учитывают текущее состояние соответствующих датчиков положения. Предпочтительно, если могут быть устранены или по меньшей мере в значительной степени уменьшены нежелательные расхождения и/или несоответствие между реальной формой головы и ориентацией обрабатываемого субъекта и используемым представлением данных, на основании которых приводится в действие электрическое устройство для обработки волос.
В первом аспекте настоящего изобретения, представлено устройство слежения за положением для автоматизированной системы обработки волос, причем упомянутое устройство содержит:
- множество датчиков положения, приспособленных для прикрепления к субъекту, волосы которого подвергаются обработке,
- передатчик, который в рабочем состоянии связан с по меньшей мере двумя датчиками положения из упомянутого множества датчиков положения, и
- контроллер положения, который приспособлен для определения взаимной ориентации между упомянутыми по меньшей мере двумя датчиками положения из упомянутого множества датчиков положения, приспособленными для прикрепления к субъекту, волосы которого подвергаются обработке, и который сигнализирует о состоянии разориентации.
Упомянутый контроллер положения приспособлен для определения заданной взаимной ориентации между упомянутыми по меньшей мере двумя датчиками положения в режиме калибровки и для определения заданного изменения взаимной ориентации между упомянутыми по меньшей мере двумя датчиками положения в рабочем режиме.
Данный аспект основан на представлении о том, что слежение за датчиками положения так, чтобы определять и отслеживать соответствующее относительное перемещение между ними, может быть использовано в качестве надежного средства для обнаружения смещенных/повернутых датчиков положения. В результате можно рекомендовать пользователю более прочно закрепить/установить датчики положения. Кроме того, можно рекомендовать пользователю осуществить перекалибровку упомянутого устройства слежения за положением.
В исходном состоянии, когда упомянутые два датчика положения прикреплены к ушам, осуществляется калибровка. Таким образом, осуществляется определение и хранение ориентации упомянутых двух датчиков положения относительно друг друга и относительно головы пользователя, по меньшей мере для планируемой процедуры обработки волос. Установленная ориентация может также называться калиброванной ориентацией.
В случае изменения взаимной ориентации/положения одного датчика относительно головы пользователя, рекомендуется осуществить перекалибровку, чтобы предотвратить рассогласованность/несоответствие между реальной формой головы пользователя и применяемой к ней моделью свойства волос. Другими словами, если предположить, что один датчик положения, который прикреплен к уху пользователя, поворачивается внутри ушного канала, то в результате этого может происходить соответствующее вращение и/или искажение модели стрижки/укладки волос. Таким образом, поскольку в данном случае любая ранее осуществленная калибровка уже непригодна, в результате электрическое устройство для обработки волос не может быть приведено в действие надлежащим образом, поскольку предполагаемое регистрируемое положение уже не соответствует реальному положению относительно реальной формы головы.
В по меньшей мере некоторых примерных вариантах осуществления, упомянутые датчики положения выполнены в виде датчиков прикрепляемых к уху или надеваемых на ухо. Обычно датчики положения по меньшей мере частично вставляют в ушной канал. Следовательно, вполне вероятно, что датчики положения могут вращаться в ушном канале или даже выскальзывать.
Поскольку очень маловероятно, что два или даже больше из упомянутого множества датчиков положения перемещаются/поворачиваются/выскальзывают одновременно, относительное перемещение/смещение между датчиками с высокой степенью вероятности свидетельствует о соответствующей разориентации по меньшей мере одного датчика положения.
В принципе может быть предусмотрен центральный блок управления, который реализует упомянутый контроллер положения и также другие контроллеры. Разумеется, в по меньшей мере некоторых вариантах осуществления могут быть предусмотрены распределенные контроллеры.
Если обнаружено соответствующее состояние разориентации, то может быть принято несколько мер. Например, можно сигнализировать пользователю о том, что необходима перекалибровка. После того как перекалибровка закончена, процесс обработки волос может быть возобновлен.
В соответствии с примерным вариантом осуществления, упомянутые по меньшей мере два датчика положения приспособлены для прикрепления к голове субъекта, при этом упомянутый контроллер положения приспособлен для определения по меньшей мере одного из реальной ориентации и реального положения электрического устройства для обработки волос относительно упомянутой головы.
Положение электрического устройства для обработки волос относительно головы определяется, как обычная мера в соответствии с примерными вариантами осуществления, опосредованно через датчики положения. Таким образом, датчики положения могут воспринимать или определять положение электрического устройства для обработки волос относительно упомянутых датчиков. Поскольку обычное положение и ориентация датчиков положения относительно головы пользователя известны, благодаря калибровке, положение электрического устройства относительно головы может быть вычислено.
В соответствии с другим примерным вариантом осуществления, предусмотрены два датчика положения, которые выполнены в виде датчиков положения, прикрепляемых к уху. В некоторых вариантах осуществления, используется ровно два датчика, включающие правый ушной датчик и левый ушной датчик.
Предпочтительно прикреплять два датчика положения к ушам пользователя. Основным преимуществом является то, что оба датчика таким образом более или менее центрированы вдоль общей оси, которая определяется двумя ушами. Кроме того, уши (ушные каналы) пользователя обычно не полностью закрыты волосами, а расположены в непосредственной близости от кожи черепа. Следовательно, уши пользователя можно рассматривать как пригодный опорный контур или опорное положение для определения положения.
В соответствии с другим примерным вариантом осуществления, упомянутые два датчика выполнены в виде ушных вкладышей или наушников-капелек, при этом упомянутый контроллер положения приспособлен для определения расхождения относительного вращения вследствие нежелательного вращения датчика в ухе.
В по меньшей мере некоторых вариантах осуществления, упомянутые два датчика дополнительно содержат ушные дуги, которые приспособлены для закрепления между ушной раковиной и стороной головы. Однако, в зависимости от общего перемещения пользователя и в частности движений головы, таких как наклоны, вращения и др., ушные датчики, которые достаточно прочно прикреплены к уху, могут также смещаться или вращаться относительно головы. Вследствие этого снижается точность определения положения.
Выполнение упомянутых двух датчиков в виде ушных датчиков имеет преимущество в том, что зона обзора пользователя заслонена незначительно. Кроме того, замечено, что другие типы датчиков положения, которые могут быть прикреплены к лицу и/или другим частям головы, помимо ушей, признаны неприглядными.
В соответствии с другим примерным вариантом осуществления, изменение взаимной ориентации, определяемое контроллером положения, представляет собой изменение ориентации при вращении.
Как было отмечено выше, при использовании ушных датчиков может быть обнаружено вращение одного датчика положения относительно уха и соответственно относительно другого датчика положения. Таким образом, может происходить изменение взаимной ориентации при вращении, которое может быть относительно легко обнаружено посредством контроллера положения.
В соответствии с другим примерным вариантом осуществления, упомянутый передатчик представляет собой передатчик магнитного поля, который генерирует переменное магнитное поле, при этом упомянутые по меньшей мере два датчика положения представляют собой магнитные датчики.
Используемые при этом магнитные датчики могут быть приспособлены для определения наличия и/или характеристик магнитного поля. В других примерных вариантах осуществления, магнитные датчики могут быть приспособлены для смещения магнитного поля. В других примерных вариантах осуществления, магнитные датчики могут быть приспособлены для генерации магнитного поля. Однако в некоторых примерных вариантах осуществления упомянутый передатчик приспособлен для генерации магнитного поля, которое может быть воспринято магнитным датчиком.
В более общем смысле, используемый при этом датчик положения может представлять собой любое устройство, которое позволяет осуществлять измерение ориентации и/или положения. Датчик положения может быть выполнен в виде датчика абсолютного положения и/или датчика относительного положения. Датчик относительного положения может также называться датчиком перемещения. Могут быть предусмотрены некоторые другие типы датчиков положения, включая, помимо прочих, емкостные преобразователи, вихретоковые датчики, ультразвуковые датчики, датчики на эффекте Холла, оптические датчики приближения, потенциометры и др.
Кроме того, упомянутое устройство слежения за положением может реализовывать или использовать систему позиционирования для эксплуатации внутри помещения, которая может быть основана на беспроводной технологии, такой как Wi-Fi. Кроме того, системы позиционирования для эксплуатации внутри помещения могут использовать по меньшей мере одну из вышеупомянутых технологий датчиков.
Ссылаясь опять на вышеописанный вариант осуществления, включающий магнитные датчики, известно несколько типов магнитных датчиков. Например, магнитные датчики могут быть основаны на эффекте Холла. Кроме того, известны магнитные датчики, которые используют эффект анизотропной магнитострикции. Кроме того, известны магнитные датчики, которые реализуют магнитоуправляемый герметизированный контакт для обнаружения магнитных полей.
В соответствии с другим примерным вариантом осуществления, по меньшей мере один датчик положения из упомянутого множества датчиков положения, приспособленный для прикрепления к субъекту, волосы которого подвергаются обработке, содержит катушечное устройство, которое воспринимает электромагнитное поле, создаваемое упомянутым передатчиком, при этом сигнал ориентации передается из упомянутого по меньшей мере одного датчика положения в упомянутый контроллер положения.
Другими словами, датчики положения приспособлены для восприятия, при помощи своих катушечных устройств, наличия и дополнительных характеристик электромагнитного поля. Таким образом, упомянутое катушечное устройство может также называться антенной.
В соответствии с другим примерным вариантом осуществления, упомянутое катушечное устройство содержит множество катушек, которые расположены в разной ориентации относительно друг друга. Следовательно, обеспечивается возможность многоосного определения. Преимущество заключается в том, что такое определение положения может осуществляться более точно.
Например, упомянутое катушечное устройство для датчика положения может включать три катушки, которые расположены преимущественно перпендикулярно друг другу. Другими словами, могут быть предусмотрены три основные измерительные оси, которые расположены перпендикулярно друг другу. Следовательно, можно определять не только расстояние, но и изменение ориентации. Многокатушечное устройство является предпочтительным для обнаружения относительных перемещений между датчиками положения.
В другом аспекте настоящего изобретения, представлена автоматизированная система обработки волос, в частности система стрижки волос, причем упомянутая система содержит переносное ручное электрическое устройство для обработки волос, узел обработки волос, размещенный на упомянутом электрическом устройстве, и устройство слежения за положением в соответствии с по меньшей мере одним вариантом осуществления, описанным в данном документе, причем по меньшей мере один элемент упомянутого электрического устройства для обработки волос выполнен с возможностью управления в зависимости от по меньшей мере одного из реальной ориентации и реального положения упомянутого электрического устройства для обработки волос относительно головы субъекта.
Упомянутый узел обработки в частности может быть выполнен в виде режущей головки, когда упомянутое электрическое устройство представляет собой электрическое устройство для стрижки волос. Кроме того, упомянутый по меньшей мере один элемент электрического устройства для обработки волос может представлять собой элемент, устанавливающий длину. В качестве примера, регулируемая промежуточная гребенка электрического устройства для обработки волос может быть управляемой в зависимости от текущего положения электрического устройства относительно головы пользователя.
Кроме того, в некоторых примерных вариантах осуществления, упомянутый передатчик прикреплен к или размещен на упомянутом электрическом устройстве для обработки волос. Таким образом, упомянутое электрическое устройство само по себе может генерировать магнитное поле, которое воспринимается датчиками положения. Если один из датчиков положения смещается или поворачивается относительно другого, то регистрируемый измерительный сигнал, который описывает электромагнитное поле, будет соответственно изменяться.
В соответствии с примерным вариантом осуществления упомянутой системы обработки волос, упомянутый передатчик размещен на корпусе электрического устройства для обработки волос, причем упомянутые по меньшей мере два датчика образуют базу отсчета для магнитного определения положения.
Следовательно, упомянутый передатчик может также включать в себя катушечное устройство, которое может быть использовано для образования/генерации излучаемого электромагнитного поля. Поскольку электрическое устройство для обработки волос само по себе уже снабжено батарейкой, аккумулятором и/или сетевым соединителем, обеспечивается также электроэнергия для электромагнитного поля.
В соответствии с другим примерным вариантом осуществления, упомянутая система обработки волос дополнительно содержит контроллер свойства волос, который приспособлен, на основе модели свойства волос, для управления по меньшей мере одним элементом упомянутой системы обработки волос в зависимости от по меньшей мере одного из реальной ориентации и реального положения упомянутого электрического устройства для обработки волос. Модель свойства волос может включать представление/набор данных по величинам длины волос (т.е. настройке длины гребенки) в зависимости от конкретного положения на голове пользователя или клиента.
В другом аспекте настоящего изобретения, представлен способ приведения в действие автоматизированной системы обработки волос, причем упомянутый способ включает следующие этапы:
- прикрепление множества датчиков положения к субъекту, волосы которого подвергаются обработке,
- обеспечение наличия передатчика, который в рабочем состоянии связан с упомянутыми по меньшей мере двумя датчиками положения из упомянутого множества датчиков положения,
- определение взаимной ориентации между упомянутыми по меньшей мере двумя датчиками положения, прикрепленными к субъекту, и
- сигнализация о состоянии разориентации, если обнаружена разориентация между упомянутыми по меньшей мере двумя датчиками положения.
Упомянутый способ также включает:
- осуществление первоначальной калибровки, тем самым определяя установленную взаимную ориентацию между упомянутыми по меньшей мере двумя датчиками положения,
- слежение за взаимной ориентацией между упомянутыми по меньшей мере двумя датчиками положения,
- выполнение операции обработки волос, включающей определение ориентации и положения электрического устройства для обработки волос относительно головы субъекта, при этом упомянутые по меньшей мере два датчика положения образуют систему для определения положения и ориентации, и
- когда обнаружено заданное изменение взаимной ориентации между упомянутыми по меньшей мере двумя датчиками положения, прекращение работы электрического устройства для обработки волос.
Таким образом, когда существует определенный риск того, что используемая модель топологии волос уже не соответствует реальной форме головы, предотвращается дальнейшая обработка, зависящая от потенциально искаженного соответствия.
Состояние разориентации может подразумевать, что обнаружен некоторый уровень или степень относительного перемещения между упомянутыми по меньшей мере двумя датчиками положения. С этой целью может быть установлен порог или диапазон для допустимых относительных перемещений.
Как уже было отмечено выше, контроллер свойства волос может представлять собой часть или может быть реализован посредством центрального блока управления, который может также, по меньшей мере в некоторых вариантах осуществления, реализовывать контроллер положения.
Модель свойства волос может включать карту свойства волос, которая включает (персонифицированное) изображение топологии головы или черепа интересующего субъекта или (неперсонифицированную) стандартную модель топологии головы или кожи черепа. Кроме того, величины положения топологии головы/черепа могут быть приписаны величинам свойства волос, в частности величинам длины волос. В результате может быть получено изображение планируемой стрижки или укладки.
На этапе калибровки, модель свойства волос, в частности соответствующая модель топологии головы/черепа, сопоставляют с реальной формой головы/черепа обрабатываемого клиента.
Упомянутый контроллер свойства волос может быть реализован в упомянутом электрическом устройстве для обработки волос. Однако, в альтернативных вариантах осуществления, контроллер свойства волос, а также упомянутый контроллер положения могут быть реализованы в отдельном вычислительном устройстве. Упомянутое вычислительное устройство может быть выполнено, например, в виде мобильного компьютера, мобильного телефона, планшетного компьютера и др.
При этом могут быть также предусмотрены сложные электрические устройства для обработки волос, которые обладают достаточной вычислительной мощностью. Следовательно, в по меньшей мер некоторых вариантах осуществления, средства управления, включающие в себя контроллер свойства волос и контроллер положения, могут быть реализованы в упомянутом электрическом устройстве для обработки волос.
В другом аспекте настоящего изобретения представлена компьютерная программа, причем упомянутая программа содержит программные кодовые средства для принуждения вычислительного устройства выполнять этапы упомянутого способа, описанные в данном документе, когда упомянутая компьютерная программа выполняется на вычислительном устройстве.
Программный код может быть зашифрован в одном или более энергонезависимых материальных носителях для исполнения вычислительной машиной, такой как компьютер. В некоторых примерных вариантах осуществления, программный код может быть загружен через сеть в блок энергостойкой памяти или накопитель из другого устройства или системы обработки данных через машиночитаемые носители сигналов для использования в упомянутой системе. Например, программный код, хранимый в машиночитаемом носителе блока памяти или накопителя в серверной системе обработки данных, может быть загружен через сеть из сервера в систему. Устройство обработки данных, обеспечивающее программный код, может представлять собой серверный компьютер, клиентский компьютер или какое-либо другое устройство, способное хранить и передавать программный код.
Используемый в данном документе термин «компьютер» может означать самые разные обрабатывающие устройства. Другими словами, мобильные устройства, обладающие значительной вычислительной мощностью, могут также называться вычислительными устройствами, даже если они обладают меньшими ресурсами для обработки информации по сравнению со стандартными «компьютерами». Разумеется, такой «компьютер» может быть частью устройства и/или системы персонального ухода. Кроме того, термином «компьютер» может также называться распределенное вычислительное устройство, которое может включать или использовать вычислительную мощность, предусмотренную в облачной среде. Термин «компьютер» или «вычислительный» может также относиться к устройствам медицинской техники, спортивно-оздоровительным устройствам, устройствам персонального ухода, тренажерам и устройствам текущего контроля в целом, которые способны обрабатывать данные. Любое автоматизированное устройство или система обработки информации, способная обрабатывать соответствующие данные, может быть названа вычислительным устройством.
Предпочтительные варианты осуществления изобретения изложены в зависимых пунктах формулы. Необходимо понимать, что заявленный способ, система и компьютерная программа могут иметь подобные и/или такие же предпочтительные варианты осуществления, как и заявленное устройство и которые определены в зависимых пунктах формулы, и наоборот.
Краткое описание чертежей
Эти и другие аспекты изобретения станут очевидными и понятными со ссылкой на варианты осуществления, описанные ниже. В приведенных ниже чертежах
Фиг. 1 представляет собой упрощенную принципиальную схему примерного варианта осуществления автоматизированной системы обработки волос;
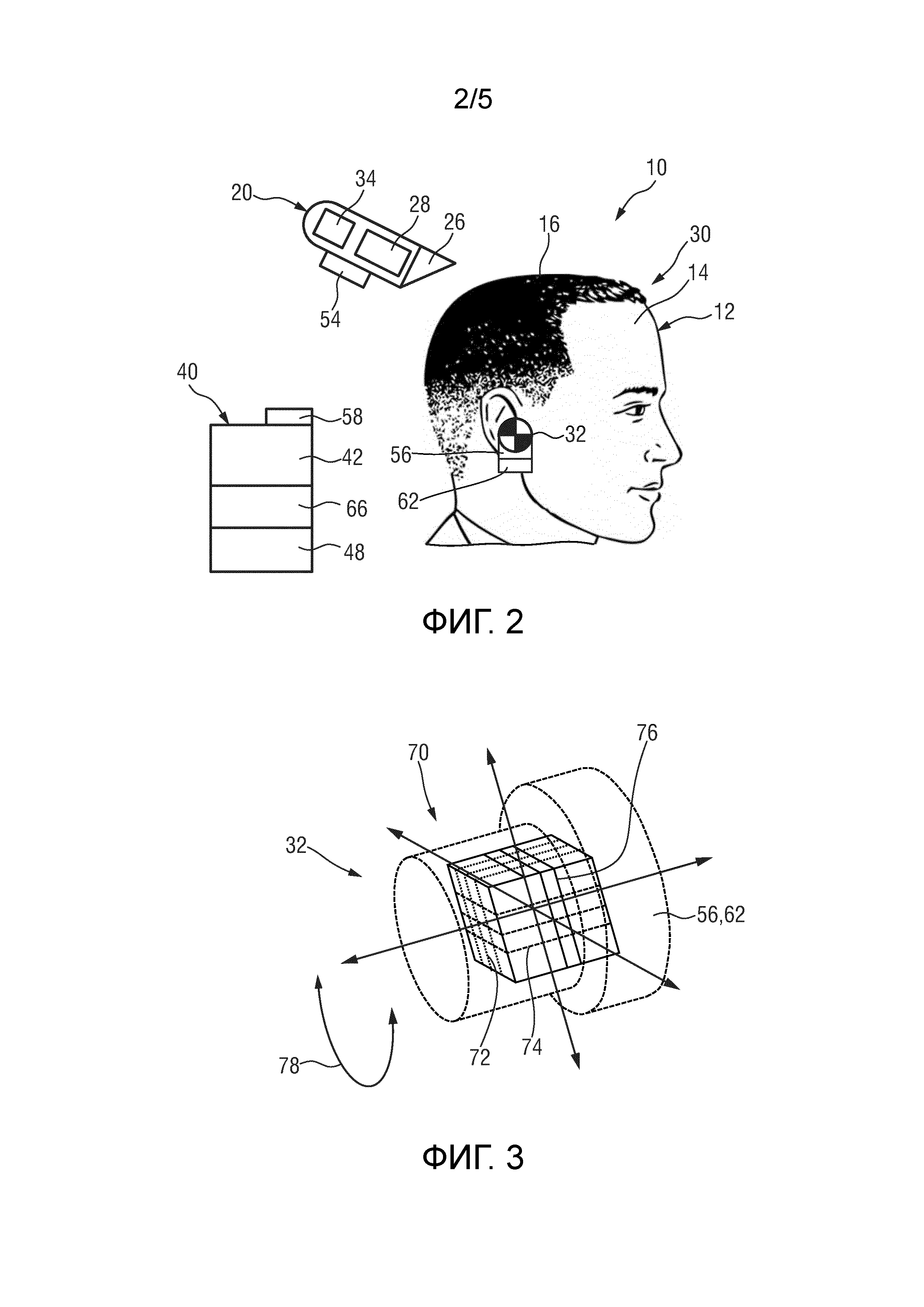
Фиг. 2 представляет собой другую альтернативную схему варианта осуществления автоматизированной системы обработки волос;
Фиг. 3 представляет собой упрощенный перспективный вид ушного датчика положения, который приспособлен для использования в устройстве слежения за положением для автоматизированной системы обработки волос;
Фиг. 4 представляет собой схематичный упрощенный вид сбоку представления в виде модели головы пользователя, в которой предусмотрена база отсчета положения;
Фиг. 5 представляет собой другой упрощенный схематичный вид сбоку модели головы пользователя, в которой, вследствие нежелательных перемещений датчиков, существует рассогласование;
Фиг. 6 представляет собой упрощенный схематичный вид сверху модели головы пользователя в полярной системе, в которой показаны ушные датчики положения;
Фиг. 7 представляет собой вид справа модели, показанной на Фиг. 6;
Фиг. 8 представляет собой вид слева модели, показанной на Фиг. 6; и
Фиг. 9 представляет собой упрощенную блок-схему варианта осуществления способа приведения в действие автоматизированной системы обработки волос.
Подробное описание вариантов осуществления изобретения
Фиг. 1 показывает упрощенную принципиальную схему автоматизированной системы 10 обработки волос, которая может также называться автоматизированной системой обработки посредством укладки волос. Система 10 может также называться автоматизированной системой обработки посредством стрижки волос. В общем, как уже было отмечено выше, настоящее изобретение относится вообще к уходу, обработке и/или укладке волос человека и волос животного, которые могут включать волосы головы или волосы тела.
Система 10 приспособлена для выполнения операции стрижки или укладки волос клиента или субъекта 12 в автоматическом или полуавтоматическом режиме с использованием компьютера. Областью применения системы 10 может быть операция обработки волос, применимая к самому пользователю. Таким образом, в дальнейшем субъект 12 будет называться пользователем, хотя третье лицо может приводить в действие электрическое устройство. Разумеется, приводить в действие систему 10 может также и другой человек.
На Фиг. 1 показан покрытый волосами участок 16 на голове 14 пользователя 12. Вообще система 10 выполнена в виде «интеллектуальной» системы стрижки или укладки волос.
Система 10 содержит электрическое устройство 20 для стрижки волос, которое может также называться автоматизированным электрическим устройством для стрижки волос. Электрическое устройство 20 выполнено в виде ручного или управляемого вручную электрического устройства. Вообще, электрическое устройство 20 может быть аналогичным стандартному неавтоматизированному электрическому устройству для стрижки волос, но может быть дополнено и снабжено дополнительными элементами обработки и управления. Вообще, устройство 20, в частности его корпус 22, выполнен с возможностью захвата пользователем и приведения в движение так, чтобы подстригать волосы. Это может включать перемещение устройства 20 по покрытому волосами участку 16 на голове 14 пользователя 12 и подстригание волос до требуемой длины. Устройство 20 выполнено с возможностью удерживания и приведения в действие самим субъектом 12 (волосы которого подвергаются обработке). Как вариант, устройство 20 может приводиться в действие другим человеком.
Устройство 20 содержит узел 24 обработки, который прикреплен к корпусу 22. Узел обработки может включать в себя, например, набор лезвий. Кроме того, с узлом 24 обработки может быть соединена гребенка. В по меньшей мере некоторых вариантах осуществления, гребенка 26 выполнена в виде регулируемой промежуточной гребенки. Кроме того, предусмотрен регулировочный узел 28 для гребенки 26. Преимущественно, гребенка 26 определяет смещение между уровнем кожи или черепа у субъекта 12 и узлом 24 обработки. Таким образом, можно регулировать длину волос.
В автоматизированных системах 10 обработки волос, управление работой электрического устройства 20 может осуществляться в зависимости от реального положения электрического устройства 20 относительно пользователя 12. С этой целью предусмотрено устройство 30 слежения за положением. Устройство 30 слежения за положением содержит множество датчиков 32 положения. Например, как показано на Фиг. 1, может быть предусмотрено два датчика 32 положения. Каждый из датчиков 32 положения, показанных в примерном варианте осуществления, показанном на Фиг. 1, выполнен в виде датчика 32, который можно носить или закреплять на ухе. Более конкретно, по меньшей мере в некоторых вариантах осуществления, датчики 32 положения могут называться ушными вкладышами или наушниками-капельками.
Кроме того, в состав упомянутого устройства слежения за положением может входить передатчик 34. В устройстве, показанном на Фиг. 1, передатчик 34 реализован в электрическом устройстве 20. Передатчик 34 взаимодействует с датчиками 32 положения. В результате можно определять и следить за положением и ориентацией электрического устройства 20 относительно головы 14 пользователя 12. В отношении принципиальной схемы системы определения положения для автоматизированной системы обработки волос, сделана ссылка опять на WO 2013/163999 А1.
Вообще основной задачей устройства 30 слежения за положением является определение текущего положения электрического устройства 20, в частности его узла 24 обработки, относительно покрытого волосами участка 16 головы (черепа) 14 субъекта 12. Таким образом, реальному положению электрического устройства 20 может быть присвоена соответствующая величина свойства волос, в частности величина длины волос. В результате, возможна автоматизированная обработка волос, поскольку регулировочный узел 28 может быть автоматически приведен в действие так, чтобы соответственно регулировать гребенку 26.
Как показано также на Фиг. 1, в состав системы 10 может также входить вычислительное устройство 40. Например, в том случае, когда электрическое устройство 20 само по себе не обладает достаточной способностью обработки данных и вычислительной мощностью. В качестве примера, вычислительное устройство 40 может быть выполнено в виде мобильного устройства, такого как планшетный компьютер, мобильный телефон и др. Вычислительное устройство 40 содержит блок обработки, который реализует по меньшей мере один контроллер 42. Контроллер 42 может также называться контроллером положения.
Кроме того, могут быть предусмотрены блоки 44, 46 обратной связи с пользователем, для осуществления взаимодействия между пользователем и электрическим устройством 20 через вычислительное устройство 40. Например, может быть предусмотрена обратная связь с пользователем через дисплей 44 и через динамики 46. Кроме того, в вычислительном устройстве 40 может быть расположен блок 48 памяти. Блок 48 памяти может быть использован для хранения моделей укладки и/или стрижки волос. В более общем смысле в блоке 48 памяти могут храниться оперативные данные. На Фиг. 1, визуальная информация 50 отображается на экране 44. Следовательно, может быть предусмотрено визуальное наведение для оператора, которое дополнительно облегчает операцию обработки волос.
В блоке 48 памяти могут храниться модель топологии головы и модель укладки волос. Следовательно, соответствующая величина длины полос может быть присвоена конкретному участку головы.
Далее сделана ссылка на Фиг. 2, показывающий альтернативный вариант осуществления системы 10 обработки волос. Как и в варианте осуществления, показанном на Фиг. 1, предусмотрено электрическое устройство 20 для обработки волос. Предусмотрено также устройство 30 слежения за положением, реализующее два ушных датчика 32. Как показано посредством упрощенной блок-схемы, может быть также предусмотрено вычислительное устройство 40. Необходимо отметить, что само вычислительное устройство 40 может быть также встроенным в электрическое устройство 20. В результате электрическое устройство 20 само по себе может обладать достаточной вычислительной мощностью.
На Фиг. 2 электрическое устройство 20, вычислительное устройство 40 и датчики 32 показаны в более упрощенном схематичном виде.
Для того чтобы следить за положением электрического устройства 20 относительно пользователя 12 и соответственно приводить в движение гребенку 26, могут быть предусмотрены линии передачи данных между электрическим устройством 20, вычислительным устройством 40 и устройством 30 слежения за положением, в частности его датчиками 32. В электрическом устройстве 20 предусмотрен интерфейс 54 управления. В датчиках 32 предусмотрен интерфейс 56 управления. В вычислительном устройстве 40 предусмотрен интерфейс 56 управления. На Фиг. 2 осуществляется беспроводной обмен данными между интерфейсами 54, 56, 58 управления.
Кроме того, датчики 32 могут быть снабжены батарейкой 62 или, в более общем случае, источником электропитания. Таким образом, по меньшей мере в некоторых примерных вариантах осуществления, датчики 32 выполнены в виде активных датчиков, которые способны передавать данные. В качестве примера, передатчик 34 электрического устройства 20 может быть выполнен в виде электромагнитного передатчика, который генерирует электромагнитное поле. Датчики 32 могут быть приспособлены для восприятия электромагнитного поля, генерируемого передатчиком 34. Таким образом, можно определять положение электрического устройства 20 относительно датчиков 32 и соответственно положение электрического устройства 20 относительно головы 14 пользователя.
Соответствующий сигнал, который характеризует текущее положение и/или ориентацию электрического устройства 20, может передаваться через интерфейсы 56, 58 управления в вычислительное устройство 40. Следовательно, контроллер 42 положения может вычислять текущее положение электрического устройства 20. Кроме того, вычислительное устройство 40 может реализовывать контроллер 66 свойства волос, который управляет настройкой электрического устройства 20 в зависимости от упомянутого текущего положения. В качестве примера, контроллер 66 свойства волос может присваивать заданную величину длины гребенки в соответствии с регистрируемым положением электрического устройства 20. Соответствующий сигнал управления может передаваться через интерфейсы 54, 56 управления в электрическое устройство 20, в частности его регулировочный узел 28. Таким образом, можно осуществлять непрерывное или квазинепрерывное управление элементом электрического устройства в зависимости от текущего положения электрического устройства 20.
Фиг. 3 показывает примерный вариант осуществления ушного датчика 32 положения. Как было отмечено выше, датчик 32 положения может быть снабжен интерфейсом 56 управления для передачи данных. Кроме того, может быть предусмотрена батарейка и/или источник 62 электропитания, см. также Фиг. 2. Воспринимающая часть датчика 32 может включать в себя катушечное устройство 70. Следовательно, датчик 32 положения может быть приспособлен для восприятия электромагнитного поля. Электрическое устройство 20 может быть снабжено соответствующим передатчиком 34, см. также Фиг. 2. В результате, в зависимости от характеристик воспринимаемого электромагнитного поля, датчик 32 положения, в частности множество соответствующих датчиков 32, могут определять положение электрического устройства 20.
Для повышения точности определения положения может быть предусмотрено многоосное катушечное устройство 70. На Фиг. 3 показаны первая катушка 72, вторая катушка 74 и третья катушка 76. Катушки 72, 74, 76 расположены со смещенной ориентацией относительно друг друга. Например, катушки 72, 74, 76 могут быть соответственно перпендикулярны друг другу. В результате можно определять не только расстояние, но и пространственное положение. Кроме того, поскольку обычно используется множество датчиков 32, в частности два противоположных датчика 32, размещенные в ушах, становится возможным высокоточное слежение за положением, которое обеспечивает выполнение операции обработки волос с повышенной точностью.
Установлено, что устройство 30 слежения за положением, которое реализует ушные датчики 32, как показано на Фиг. 1 и Фиг. 2, является практически осуществимым и эффективным подходом к слежению за положением для автоматизированных систем 10 обработки волос.
Однако установлено также, что в частности датчики 32, которые можно носить или закреплять на ушах, склонны к нежелательным перемещениям, в частности к нежелательному вращению вокруг своей основной оси, см. также изогнутую двойную стрелку, обозначенную ссылочной позицией 78 на Фиг. 3, которая показывает нежелательное вращение датчика.
Далее сделана ссылка на Фиг. 4 и Фиг. 5, показывающие упрощенный вид сбоку модели головы 14. Топология головы 14 показана посредством сетки, которая натянута на голову. Таким образом, может быть создана модель 80, которая включает изображение топологии головы 14 и соответствующие величины свойства волос, например, величины длины волос. Датчик положения, показанный ссылочной позицией 32, прикреплен к голове. В начале процесса обработки волос, определение положения может быть инициировано посредством приложения датчика 32 и посредством калибровки устройства 30 слежения за положением, которое использует датчик 32.
Как показано на Фиг. 3, датчик 32 может быть выполнен в виде датчика положения, который способен определять пространственные положения. Например, катушечное устройство 70, содержащее три катушки 72, 74, 76, как показано на Фиг. 3, обеспечивает возможность определения трехмерного положения. Другими словами, катушечное устройство 70 может определять собственную систему датчика 32. В качестве примера, датчик 32 может быть способен определять расстояние между передатчиком 34 электрического устройства 20 и датчиком 32 в продольном направлении, поперечном направлении и направлении высоты.
Далее сделана ссылка на Фиг. 5. На Фиг. 5 датчик 32 положения хотя и приложен к голове 14, но несколько смещен или повернут. Таким образом, предполагая, что калибровка происходила в состоянии, показанном на Фиг. 4, если датчик 32 переместился, то модель 80 будет также искажена. В состоянии, показанном на Фиг. 5, будет определено положение электрического устройства 20 (см. Фиг. 1 и Фиг. 2) относительно искаженной модели 80, которое не соответствует положению относительно реальной головы 14 обрабатываемого субъекта.
Вращение датчика является специфической проблемой, поскольку предпочтительным положением при установке датчика 32 положения является участок уха пользователя. Поэтому датчики 32 обычно выполнены в виде наушников-капелек или ушных вкладышей. Например, датчики 32 положения могут быть по меньшей мере частично вставленными в ушной канал. А значит вполне вероятно может происходить вращение датчика 32 положения вокруг центральной оси ушного канала, если датчик 32 положения закреплен недостаточно прочно.
То же самое относится к случаю, когда датчик 32 положения снабжен заушным крючком, который расположен позади ушной раковины. Таким образом предусмотрено средство определения положения. Однако поскольку реально неподвижное прикрепление такой ушной дужки к ушной раковине выглядит неприглядно, обычно используют только относительно мягкое крепление датчика положения. А это может приводить к нежелательным перемещениям датчика относительно головы 14 пользователя, результатом которых является искаженная модель 80 свойства волос.
Далее сделана ссылка на Фиг. 6, Фиг. 7 и Фиг. 8. Фиг. 6 представляет собой упрощенный схематичный вид сверху головы 14 пользователя, а Фиг. 7 и Фиг. 8 показывают соответственно вид справа (Фиг. 7) и вид слева (Фиг. 8). Как показано, могут быть использованы два датчика 32 положения. Каждый из датчиков 32 положения может быть прикреплен к уху пользователя 12. На Фиг. 6, Фиг. 7 и Фиг. 8 система показана в виде глобуса, который изображает, например, полярную систему, реализующую схему широтно-долготной сетки.
Во время первоначальной калибровки датчиков 32 положения, собственные ы положения датчиков 32 положения могут быть скоррелированы с глобальной моделью 80. Использование двух или даже более датчиков 32 положения дополнительно повышает точность определения положения. Таким образом, можно точно определять положение электрического устройства 20 относительно головы 14 пользователя 12.
Другим преимуществом наличия двух или более датчиков 32 положения является то, что можно также определять относительные перемещения между датчиками 32 положения. В качестве примера, можно определять вращение правого датчика 32 положения, показанного на Фиг. 7, относительно левого датчика 32 положения, показанного на Фиг. 8 (см. стрелку 84 на Фиг. 7). И наоборот, можно определять вращение левого датчика 32 положения относительно правого датчика 32 положения (см. стрелку 86 на Фиг. 8). Ось вращения показана на Фиг. 6 ссылочной позицией 82.
В нормальном рабочем состоянии относительное перемещение между датчиками 32 отсутствует. Поэтому всякий раз, когда зарегистрировано значительное перемещение между датчиками 32 положения, которое может предусматривать достижение соответствующего порога относительного перемещения, можно сделать вывод, что первоначальная калибровка датчиков 32 положения уже недействительна.
В результате, можно также сделать вывод, что определение положения больше не соответствует требуемому уровню точности. Другими словами, топология головы модели, которая образует часть модели 80 свойства волос, больше не соответствует реальному контуру головы 14 пользователя 12.
Способом устранения такой нежелательной разориентации может быть побуждение пользователя электрического устройства перекалибровать устройство 30 слежения за положением, см. Фиг. 1. Таким образом, датчики 32 положения, в их реальном положении при закреплении и ориентации, могут быть коррелированы с реальным контуром головы субъекта 12, что предусматривает согласование модели 80 свойства волос с данным контуром головы 14. Кроме того, можно побудить пользователя повторно прочно прикрепить смещенный/повернутый датчик 32 положения.
В результате определение положения электрического устройства 20 относительно датчиков 32 положения обеспечивает опосредованное, но с достаточно высокой точностью определение положения электрического устройства 20 относительно головы 14. Таким образом, в соответствии с моделью 80 свойства волос, которая используется для данной процедуры обработки волос, электрическое устройство 20 может быть приведено в действие таким образом, чтобы выполнять требуемую операцию обработки волос.
Дополнительным преимуществом использования двух или более датчиков 32 положения является то, что движение головы субъекта 12, например, наклон, вращение и др., может быть отделено от относительного перемещения между упомянутыми двумя или более датчиками 32 положения. Следовательно, в каждом случае можно принять соответствующие необходимые ответные меры.
Всякий раз, когда зарегистрировано некоторое относительное перемещение между датчиками 32 положения, в частности относительное вращение вокруг оси 82 (Фиг. 6), которая проходит между ушами человека 12, можно предположить, что данное относительное перемещение связано с выходом или выскальзыванием по меньшей мере одного из датчиков 32 из своего положения.
Ссылка сделана на Фиг. 9, показывающий упрощенную блок-схему, показывающую вариант осуществления способа автоматизированной обработки волос.
Упомянутый способ включает этап S10, включающий обеспечение наличия электрического устройства для обработки волос, в частности электрического устройства для стрижки или укладки волос. Кроме того, упомянутый способ включает этап S12, включающий обеспечение наличия системы слежения за положением, включающей в себя по меньшей мере два датчика положения, которые могут быть приспособлены для прикрепления к голове пользователя. Предпочтительно, упомянутые датчики положения выполнены в виде датчиков, которые можно носить или закреплять на ушах.
На дополнительном этапе S14, датчики положения прикрепляют и устанавливают на место. Таким образом, например, первый датчик положения может быть прикреплен к левому уху, а второй датчик положения может быть прикреплен к правому уху пользователя.
На следующем этапе S18, осуществляется калибровка. Этап S18 калибровки коррелирует собственную систему отсчета положения/ориентации датчика положения с глобальной системой отсчета положения, т.е. топологией головы пользователя. Таким образом, модель свойства волос, включающая топологию головы/черепа и соответствующие величины свойства волос, в частности величины длины волос, может быть согласована с реальной головой пользователя.
Далее может быть инициирован этап S18 обработки волос. Этап S18 обработки волос может включать стрижку волос и, в более общем смысле, операцию укладки волос.
Обычно процедура обработки волос включает этап S20 слежения за положением. Упомянутое слежение за положением включает определение положения электрического устройства для обработки волос относительно головы пользователя. Таким образом, на основе модели свойства волос, можно управлять соответствующими элементами электрического устройства для обработки волос, изменяя из положение. Это приводит к автоматизированной или осуществляемой при помощи компьютера процедуре обработке полос.
Далее предусмотрен этап S22, который в примерном варианте осуществления, показанном на Фиг. 9, выполнен в виде этапа принятия решения. На этапе S22 осуществляется слежение за относительным положением/ориентацией между двумя датчиками. Если зарегистрировано, что уровень относительного перемещения/относительного вращения между датчиками положения превышает заданный порог, то можно сделать вывод о том, что один из датчиков повернулся или выскользнул со своего места. Другими словами, на этапе S22 может осуществляться сравнение реальной величины с заданной величиной.
Если на этапе S22 установлено, что достигнут нежелательный уровень перемещения датчика, то на этапе S22 может быть установлено, что необходима другая калибровка или перекалибровка (этап S16). Таким образом, этап S24 может также называться этапом предупреждения. На этапе S24 пользователь может быть побужден поправить и установить на место датчики.
Когда на этапе S22 установлено, что неблагоприятное перемещение датчиков отсутствует, может быть продолжена или возобновлена операция обработки волос, этап S18, который опять включает дополнительный этап S20 слежения за положением.
Хотя изобретение показано в чертежах и подробно описано в вышеприведенном описании, такие чертежи и описание следует рассматривать как пояснительные или примерные, а не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления. Другие изменения в раскрытых вариантах осуществления могут быть понятны и осуществлены специалистами в данной области техники при практическом осуществлении заявленного изобретения, на основе изучения чертежей, описания и прилагаемой формулы изобретения.
В формуле изобретения слово «содержащий» не исключает других элементов или этапов, а термины в единственном числе не исключают множества. Один элемент или другой блок может выполнять функции нескольких элементов, упомянутых в формуле изобретения. Только тот факт, что некоторые признаки упомянуты во взаимно разных зависимых пунктах формулы, не указывает на то, что не может быть успешно использована комбинация данных признаков.
Компьютерная программа может храниться/распространяться на пригодном носителе, таком как оптический носитель информации или полупроводниковый носитель информации, поставляемые совместно или как часть другого аппаратного обеспечения, но может также распространяться в других формах, например, через Internet или другие проводные или беспроводные телекоммуникационные системы. Вычислительное устройство может представлять собой мобильное или портативное устройство, такое как мобильный телефон, мобильный компьютер, планшетный компьютер и др.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем.
Реферат
Настоящее изобретение относится к устройству (30) слежения за положением для автоматизированной системы (10) обработки волос, причем упомянутое устройство содержит множество датчиков (32) положения, приспособленных для прикрепления к субъекту (12), волосы которого подвергаются обработке, передатчик (34), который в рабочем состоянии связан с по меньшей мере двумя датчиками (32) положения из упомянутого множества датчиков (32) положения, и контроллер (34) положения, который приспособлен для определения взаимной ориентации между упомянутыми по меньшей мере двумя датчиками (32) положения из упомянутого множества датчиков (32) положения и который сигнализирует о состоянии разориентации. Настоящее изобретение относится также к автоматизированной системе (10) обработки волос и к способу приведения в действие автоматизированной системы (10) обработки волос. 3 н. и 8 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для срезания волос и способ выборочного срезания волос определенного цвета
Комментарии