Устройство для лечения контрактур локтевого сустава травматического и нетравматического генеза - RU184908U1
Код документа: RU184908U1
Чертежи

Описание
Полезная модель относится к медицинской технике в частности к механотерапевтическим аппаратам для восстановления функции локтевого сустава при наличии контрактур травматического и нетравматического генеза.
Известно «Устройство для востановления подвижности в суставах» (патент РФ №2139701 опубликован 20.10.1999).Изобретение относится к медицинской технике и предназначено для восстановления амплитуды движения в суставах конечностей. Устройство содержит электропривод, корпус которого выполнен в виде П-образной рамы, и имеет два выходных вала, расположенные соосно на концах рамы. В средней части рамы с помощью регулировочных и фиксирующих элементов крепится опорное приспособление для одного из смежных сегментов, образующих сустав. Второе опорное приспособление посредством механизма передачи вращения между двумя осными валами соединяется с выходными валами редуктора. Устройство компактно крепится непосредственно на руке или ноге пациента. Снабжено системой управления. Устройство имеет дополнительные электроприводы для разработки суставов в двух плоскостях или для снижения нагрузки на суставные поверхности. Технический результат заключается в возможности восстановления движения в различных суставах, обеспечивая как обычный режим пассивных движений, так и разгружая суставные поверхности, позволяет обеспечить движение в суставах одновременно в двух плоскостях.
Недостатком данного устройства является то, что оно не позволяет реализовать возможность программного автоматического управления при проведении механотерапии для лечения контрактур локтевого сустава, обеспечивающего индивидуальный подход в формировании правильных углов и циклических объемов движений.
Известно устройство для разработки контрактур локтевого сустава (патент РФ № 138420 опубликован 20.03.2014), содержащее ложементы плеча и предплечья, соединенные цилиндрическим шарниром, электромеханический привод, блок управления и питания, отличающееся тем, что электромеханический привод выполнен в виде шагового электродвигателя, вал которого имеет резьбовую нарезку, установленного в корпусе, снабженном телескопической частью, содержащей цилиндр и соосно установленную в нем резьбовую втулку, навинченную на вал шагового электродвигателя, резьбовая втулка и корпус оснащены двухплоскостными шарнирными узлами, один шарнирный узел с возможностью перемещения закреплен винтом в пазу кронштейна установленного на ложементе плеча, а другой шарнирный узел закреплен винтом в пазу кронштейна установленного на ложементе предплечья.
При этом штанги цилиндрического шарнира закреплены винтами на кронштейнах с возможностью перемещения, ложементы выполнены в виде жесткого каркаса, оснащенного гибкими ремнями, между резьбовой втулкой и цилиндром установлены фторопластовые вкладыши, телескопическая часть корпуса снабжена ограничителем, выполненным в виде втулки с винтом, торец которого упирается в грань на цилиндре, цилиндр оснащен продольным пазом, в котором размещен шип, выполненный на резьбовой втулке.
Описанное устройство не реализует возможность индивидуального подхода при проведении механотерапии для лечения контрактур локтевого сустава в связи с отсутствием проработки циклических движений одновременно в нескольких плоскостях, что не обеспечивает формирование физиологически правильного движения в суставе.
Известен выбранный за прототип автоматический разработчик коленных и локтевых суставов (патент РФ №177276, опубликован 14.02.2018). Полезная модель относится к медицинской технике, к аппаратам для механотерапии контрактур суставов и может быть использована для восстановления амплитуды движения в локтевом и коленном суставе. Автоматический разработчик коленных и локтевых суставов содержит линейный двигатель с закрепленными на нем двумя быстросъемными механическими креплениями, быстросъемные механические крепления закреплены, с возможностью изменения положения, на элементах фиксации сегмента конечности связаны через анатомический осевой шарнир со смещаемой осью вращения, линейный двигатель подключен к программируемому электронному блоку управления, состоящему из электрически связанных между собой и размещенных в едином корпусе - сенсорного экрана, микроконтроллера, датчика контроля параметров линейного двигателя, драйвера линейного двигателя, разъема подключения источника электропитания, разъема подключения линейного двигателя. Полезная модель обеспечивает автоматическую разработку контрактур локтевого и коленного суставов и предотвращает их образование, путем проведения механотерапии в раннем послеоперационном периоде и в период реабилитации, у пациентов с установленными, на конечностях, аппаратами внешней фиксации, а также у пациентов без аппаратов внешней фиксации. При этом обеспечивает выполнение физиологически правильного движения в суставе за счет использования анатомических шарниров.
Недостатком устройства является невозможность реализации индивидуального подхода при проведении механотерапии для лечения контрактур локтевого сустава в связи с отсутствием проработки циклических движений в нескольких плоскостях.
Задачей предлагаемого технического решения является расширение арсенала автоматических устройств механотерапии для лечения контрактур локтевого сустава.
Технический результат – реализация поставленной задачи за счет возможности осуществления циклических движений локтевого сустава в нескольких плоскостях, так как известно, что в лoктeвoм сoeдинeнии вoзмoжны не только тaкиe движeния, кaк сгибaниe и paзгибaниe в одной плоскости, но также вpaщeниe пpeдплeчья внутpь и нapужу oтнoситeльнo плeчeвoй кoсти в различных плоскостях.
Технический результат достигается путем использования в предложенном устройстве дополнительного линейного двигателя, датчиков угла поворота, датчиков усилия и возможности асинхронной работы линейных двигателей в автоматическом режиме, что обеспечивает возможность осуществления циклических движений локтевого сустава в нескольких плоскостях исходя из физиологического состояния и индивидуально допустимых нагрузок конкретного пациента при проведении механотерапии.
Для решения поставленной задачи предложено автоматическое устройство для лечения контрактур локтевого сустава травматического и нетравматического генеза, содержащее линейный двигатель, подключенный к программируемому электронному блоку управления, два элемента фиксации сегментов конечности, два быстросъемных механических крепления, закрепленных на линейном двигателе с возможностью изменения положения на элементах фиксации сегмента конечности, которое содержит следующие новые признаки:
- устройство дополнительно содержит второй линейный двигатель с двумя быстросъемными механическими креплениями, закрепленный параллельно первому, что обеспечивает возможность движения локтевого сустава в различных плоскостях за счет возможности выдвижения штоков двигателей как на одинаковую длину при синхронной работе линейных двигателей, так и на различную длину при асинхронной работе линейных двигателей в автоматическом режиме;
- два датчика усилия, укрепленные на упругих пластинах, размещенных с двух противоположных сторон на предплечевом элементе фиксации сегмента конечности, обеспечивающие измерение усилия, прилагаемого для обеспечения движения в локтевом суставе;
- два датчика угла поворота, шпильки которых закреплены на навесах, посредством которых соединены элементы фиксации сегментов конечности, что обеспечивает контроль за реализацией угла поворота в различных плоскостях движения локтевого сустава.
Совокупность указанных признаков не известна из уровня техники, следовательно заявленная полезная модель соответствует условию новизны. Соответствие условию промышленной применимости обеспечивает возможность реализации устройства с возможностью его использования для разработки контрактур локтевого сустава травматического и нетравматического генеза в разных плоскостях движения без возникновения болевых ощущений у пациента за счет возможности пациента самостоятельно задавать необходимый объем и плоскость движения в суставе. Наличие датчиков усилия и датчиков угла поворота дает возможность постоянного контроля состояния пациента и позволяет больному проводить сеансы восстановления самостоятельно, обучаясь управлять напряжением и расслаблением мышц, за счет чего постепенно устраняется мышечная контрактура и увеличивается объем движения.
Предлагаемое устройство для лечения контрактур локтевого сустава травматического и нетравматического генеза иллюстрируется чертежами, приведенными на фигурах:
фигура 1 – общий вид;
фигура 2 –вид сбоку;
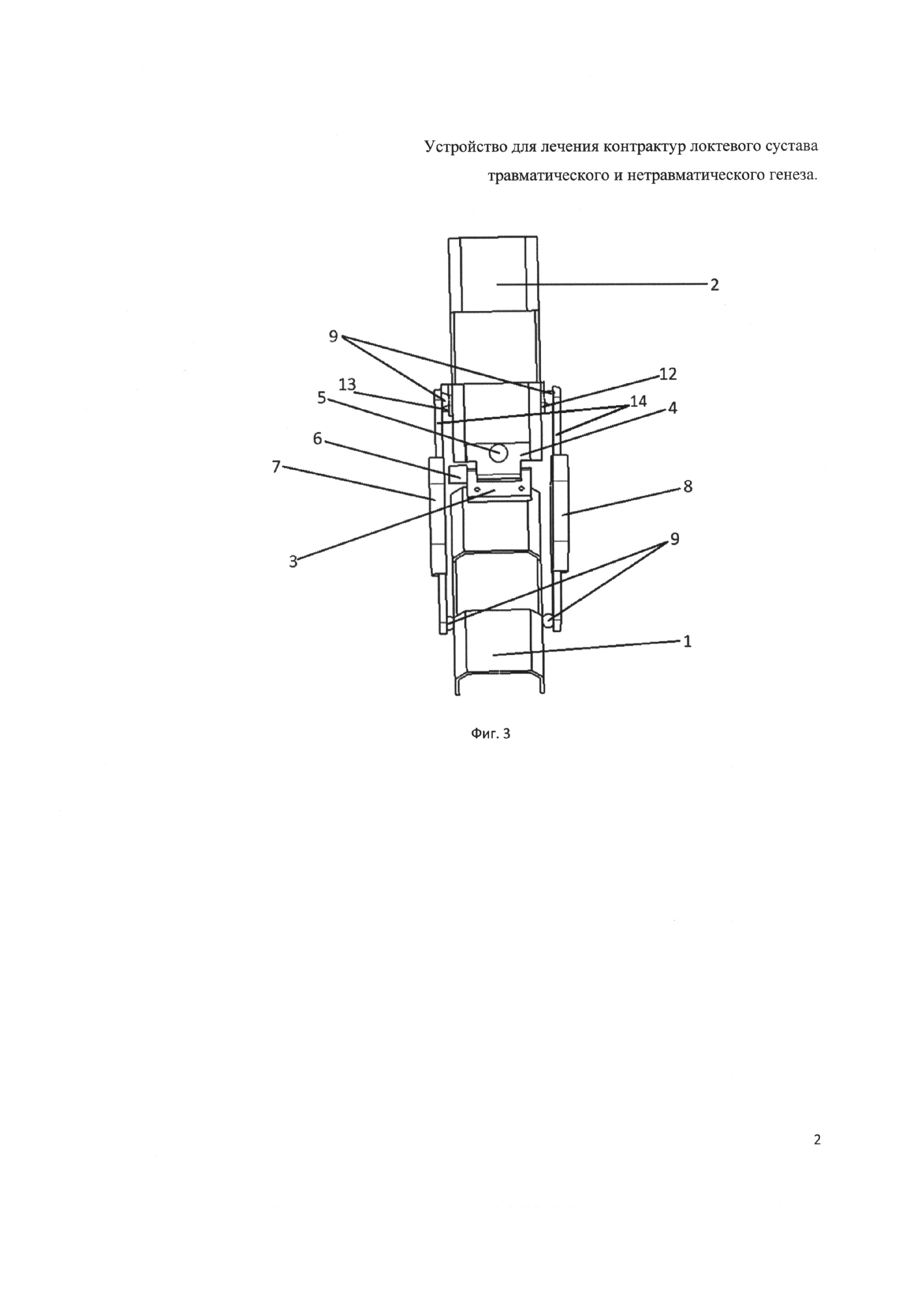
фигура 3 –вид сверху.
Основой устройства являются плечевой элемент 1 фиксации сегмента конечности и предплечевой элемент 2 фиксации сегмента конечности, способных перемещаться друг относительно друга в различных плоскостях посредством навесов 3 и 4, с закрепленными на них потенциометрическими датчиками угла поворота 5 и 6. Два линейных двигателя 7 и 8, подключенных к программируемому электронному блоку управления (на фигурах не показан), расположены симметрично с двух сторон устройства и соединены посредством быстросъемных механических креплений 9 с одной стороны с плечевым элементом 1 фиксации сегмента конечности с возможностью перемещения по направляющим 10 указанных креплений 9, зафиксированных гайкой 11. На предплечевом элементе 2 фиксации сегмента конечности с двух сторон симметрично закреплены упругие пластины 12, содержащие датчики усилия 13. Кроме того, к упругим пластинам 12 посредством быстросъемного механического крепления 9 шарнирно соединены концы штоков 14 линейных двигателей 7 и 8.
Описание работы устройства.
Руку с поврежденным суставом помещают в устройство, сегменты конечности закрепляют в элементах фиксации сегмента конечности 1 и 2 посредством гибких манжет (на рисунке не указаны). При проведении механотерапии для лечения контрактур локтевого сустава циклические движения производят с учетом данных, основанных на характере повреждения, стадии лечения и т.п., при помощи двух линейных двигателей 7 и 8. Контроль усилия воздействия конструкции на локтевой сустав осуществляется в блоке управления, посредством датчиков усилия 13. При синхронной работе двух линейных двигателей 7 и 8 с одинаковым выдвижением штоков 14, осуществляется угловое движение на сгибание-разгибание, например, в плоскости боковых граней упругих пластин. При асинхронной работе двух линейных двигателей 7 и 8 их штоки 14 выдвигаются на различную длину, обеспечивая возможность осуществлять вращательное движение сустава за счет шарнирного закрепления быстросъемного механического крепления 9 на упругой пластине 12, что позволяет по выбору пациента осуществлять либо вращательное движение либо сочетать вращательное движение с угловым в нужной плоскости. Потенциометрические датчики угла поворота 5 и 6, закрепленные на навесах 3 и 4, позволяют вести контроль за изменениями объема движения в локтевом суставе в различных плоскостях.
С помощью блока управления пациент подбирает рекомендованный врачом режим механотерапии, при которой достигаются максимальные скорость и объем движений без болевых ощущений пациента в разных плоскостях движения. При этом пациент учится управлять напряжением и расслаблением мышц, за счет чего постепенно устраняется мышечная контрактура и увеличивается объем движения. Предложенное устройство позволяет осуществлять не травмирующее воздействие на сустав в разных плоскостях движения, отслеживать усилия при реализации угла поворота. Все это дает возможность постоянно контролировать состояние пациента и позволяет больному проводить сеансы восстановления самостоятельно. За счет этого пациент развивает сустав не только не испытывая болевых ощущений, но и постепенно учась управлять мышцами, восстанавливая их координацию.
Реферат
Устройство для лечения контрактур локтевого сустава травматического и нетравматического генеза относится к медицинской технике, в частности к механотерапевтическим аппаратам для восстановления функции локтевого сустава при наличии контрактур травматического и не травматического генеза. Устройство содержит два закрепленных параллельно линейных двигателя, подключенных к программируемому электронному блоку управления, с возможностью выдвижения штоков двигателей как на одинаковую длину при синхронной работе двигателей, так и на различную длину при асинхронной работе линейных двигателей в автоматическом режиме. На каждом линейном двигателе закреплены быстросъемные механические крепления, два из которых выполнены с возможностью перемещения по направляющим на плечевом элементе фиксации сегмента конечности, другие два быстросъемных механических крепления соединяют шарнирно концы штоков линейных двигателей с упругими пластинами, расположенными на предплечевом элементе фиксации сегмента конечности. Кроме того, устройство содержит два датчика усилия, размещенные на упругих пластинах и два датчика угла поворота, шпильки которых закреплены на навесах, посредством которых соединены предплечевой и плечевой элементы фиксации сегментов конечности. Технический результат заключается в возможности осуществления циклических движений локтевого сустава в нескольких плоскостях, исходя из физиологического состояния и индивидуально допустимых нагрузок конкретного пациента при проведении механотерапии.
Комментарии