Система и способ управления движениями пользователя во время процедуры бритья - RU2665443C2
Код документа: RU2665443C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе управления бритьем для управления движениями пользователя во время процедуры бритья.
УРОВЕНЬ ТЕХНИКИ ПО ИЗОБРЕТЕНИЮ
Известно множество разных типов устройств для срезания волос на теле. Волосы можно срезать, используя ножницы, но для сведения к минимуму длины волос используются другие типы устройств, такие как бреющие устройства и триммеры. Раньше мужчины использовали бритвенные лезвия для бороды. Позже стали популярны электробритвы, в том числе и для женщин. Сейчас имеются разнообразные электрические устройства для срезания волос, от триммеров для подравнивания растительности на лице до электробритв для бритья бороды или других частей тела.
Обычная цель при бритье состоит в том, чтобы добиться как можно более гладкого бритья при минимальном раздражении кожи. Сбривание растительности на лице производится в основном мужчинами, но женщины могут также сбривать волосы на своем теле или лице.
Традиционное бритье состоит в использовании бритвенного лезвия для срезания растительности на лице. В течение столетий в этой области было разработано несколько способов, которые сделали возможным достижение гладкого бритья без раздражения кожи. Для этого может потребоваться несколько этапов в процессе бритья. Во-первых, покрывающие кожу волосы предварительно обрабатываются, чтобы начать процесс бритья. Цель заключается в том, чтобы оптимизировать характеристики волос и кожи для обеспечения оптимального бритья. Предварительная обработка может состоять в увлажнении и/или нагревании кожи/волос. Затем волосы несколько раз срезаются до тех пор, пока не сможет быть обеспечено безопасное бритье по отношению к волокнам. Это может состоять из первого срезания волос в направлении их роста, то есть срезании только волос, не дотрагиваясь до кожи. Вторым этапом бритья является срезание волос в направлении, перпендикулярном их росту, чтобы подготовить волосы к последнему этапу срезания. На всех этих этапах поддерживается увлажнение кожи, и лезвие удерживается на минимальном расстоянии от кожи, сводя тем самым к минимуму повреждение кожи.
Во время следующих за бритьем процедур пользователь должен закрыть поры, оставленные открытыми после бритья, и свести к минимуму вероятность инфекции от операции бритья. Это достигается понижением температуры лица, что заставляет поры естественным образом закрыться, и применением (химических) дезинфицирующих средств, разрушающих любые причины инфекции, которые могут быть результатом процедуры бритья.
Хотя описанная процедура бритья является очень эффективной для обеспечения свободного от раздражения гладкого бритья, эта процедура обычно считается занимающей много времени и трудной, так как она требует уникального знания роста волос на каждой части лица и точного соблюдения последовательности бритья. Волосы на лице растут, имея разную структуру расположения у разных людей. Тогда как у некоторых людей наблюдается очень однородная картина роста волос на их лице, у большинства людей имеются некоторые изменения в этой картине. Разные картины могут состоять из волос, растущих в разных локальных направлениях по отношению к коже, создавая завитки, разветвления или завихрения, в которых сходятся волосы.
Известны несколько систем для срезания волос, оказывающих помощь пользователю во время срезания его волос. В публикации WO 20134|096572 описывается система, обеспечивающая руководящие указания для пользователя. Информация, указывающая положение устройства для срезания волос по отношению к части тела, вырабатывается и используется для управления движениями пользователя. Камера на электронном компьютерном устройстве может собирать изображения пользователя и оценивать их, чтобы представить длину и стиль волос, и определить, какие стили и длины возможны применительно к волосам пользователя. Однако системы, описанные в WO 20134|096572, не могут определить направление роста волос для оптимизации результата бритья.
Поэтому существует необходимость в системе, которая обеспечит руководство пользователю применительно к оптимальной последовательности бритья во время процедуры бритья.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является обеспечение системы управления бритьем для управления движениями пользователя во время процедуры бритья.
Согласно настоящему изобретению обеспечена система управления бритьем, предназначенная для управления движениями пользователя во время процедуры бритья, при этом система содержит модуль формирования изображений, выполненный с возможностью регистрации изображения части тела пользователя, анализатор данных изображения, выполненный с возможностью определения локального направления роста волос, основываясь на данных в изображении, контроллер, выполненный с возможностью генерации команд относительно направления, в котором должно перемещаться по телу устройство для срезания волос в зависимости от определенного локального направления роста волос, и систему обратной связи, выполненную с возможностью подачи команд пользователю.
Система управления бритьем согласно изобретению способна анализировать и определять уникальную картину роста волос на коже пользователя и, основываясь на определенной картине роста волос, управлять движениями пользователя во время процедуры бритья применительно к оптимальной последовательности бритья. Оптимальный результат бритья требует знания локального направления роста волос, то есть направления роста волос в зависимости от локальной позиции на теле пользователя, которое может быть разным на разных частях лица или тела и может быть разным у разных людей. Анализатор данных изображения будет определять локальное направление роста волос, и пользователь должен будет лишь следовать командам, подаваемым системой, чтобы получить оптимальный результат бритья.
Модуль формирования изображений может быть выполнен с возможностью создания двухмерного (2D) изображения, в котором каждый обнаруженный волос представляется линией в 2D изображении. Анализатор данных изображения может быть выполнен с возможностью определения локального направления роста волос с помощью алгоритма распространения, который начинается с определения направления роста волос в области инициализации, используя эвристическую информацию об известных направлениях роста волос, и определения направления роста волос для волос в соседней области, примыкающей или частично перекрывающейся с областью инициализации, используя ориентацию каждой из линий, представляющих волосы, и их относительное положение по отношению к области инициализации или области, обработанной ранее.
Система может содержать осветительный элемент, выполненный с возможностью освещения части тела, с тем чтобы создавать тени волос на коже пользователя, причем в 2D изображении каждый обнаруженный волос представлен первой линией, обозначающей волос, и второй линией, обозначающей тень волоса, анализатор данных изображения, выполненный с возможностью обнаружения локального направления роста волос, используя точку встречи первой и второй линий. Модуль формирования изображений может быть выполнен с возможностью автоматической регистрации последовательности 2D изображений, при этом анализатор данных изображения выполняется с возможностью создания трехмерного (3D) изображения части тела, используя последовательность 2D изображений, и анализатор данных изображения дополнительно выполняется с возможностью определения локального направления роста волос, анализируя 3D изображение.
В варианте осуществления модуль формирования изображений выполнен с возможностью создания 3D изображения, в котором каждый обнаруженный волос представлен 3D линией. Анализатор данных изображения может затем быть выполнен с возможностью определения локального направления роста волос, анализируя 3D изображение.
В варианте осуществления системы управления бритьем согласно изобретению контроллер выполнен с возможностью определения предпочтительной последовательности движений, выполняемых пользователем, на основе определенного локального направления роста волос, причем команды относятся к этапам внутри предпочтительной последовательности движений. В этом варианте осуществления пользователь может принимать предписание с информацией о направлении, в котором должно передвигаться устройство для срезания волос во время всего процесса бритья.
В варианте осуществления системы управления бритьем согласно изобретению контроллер выполнен с возможностью определения локального направления роста волос, используя эвристическую информацию об известных направлениях роста волос в определенных позициях на теле пользователя. Например, при использовании технологии оптической регистрации для определения локального направления роста волос из изображения, зарегистрированное изображение может указывать именно ориентацию волос, но не действительное направление роста волос. Эвристическая информация об известных направлениях роста волос в определенных позициях на лице или теле будет в этом случае улучать определение контроллером направления роста волос за счет использования зарегистрированной картины. Например, бакенбарды и усы обычно растут в направлении вниз по отношению к лицу.
В варианте осуществления системы управления бритьем согласно изобретению эта система содержит идентификатор положения, выполненный с возможностью генерации информации положения, указывающей положение устройства для срезания волос по отношению к части тела. Информации положения может быть использована контроллером, чтобы обеспечить руководство пользователем в реальном времени. Контроллер может быть выполнен с возможностью мониторинга траектории движения устройства для срезания волос, используя информацию положения. Это позволяет контроллеру запоминать и использовать историю траекторий, которая может быть использована для генерации команд, являющихся предпочтительными для разных этапов процедуры бритья. Например, пользователю может быть дана команда на передвижение бритвы по поверхности кожи в направлении роста волос во время первого этапа и в направлении, противоположном направлению роста волос (“против шерсти”), на втором этапе, и, возможно, перпендикулярно направлению роста волос между первым и вторым этапами.
В другом варианте осуществления системы управления бритьем согласно изобретению контроллер выполнен с возможностью использования системы обратной связи для обеспечения указания пользователю желаемого пути и/или угла ориентации устройства для срезания волос, основываясь на информации положения. Это снабдит пользователя очень удобной для пользования обратной связью, которая указывает не только предпочтительное направление передвижения в мгновенном положении устройства для срезания волос, но также и предпочтительные направления в последующих положениях, что позволит пользователю правильно следовать командам, даже когда он передвигает устройство для срезания волос с относительно высокой скоростью. Представление предпочтительного угла ориентации поможет пользователю оптимизировать бритье в областях лица или тела, в которых ориентация важна для оптимального бритья.
В другом варианте осуществления системы управления бритьем согласно изобретению система обратной связи содержит дисплейный модуль, выполненный с возможностью отображения на экране представления части тела и знаков визуальной информации, представляющих команды. Это снабдит пользователя очень удобной для пользования обратной связью, позволяющей пользователю легко понимать команды, относящиеся к части лица или тела, подлежащей обработке.
Альтернативно или дополнительно, система обратной связи может содержать команды в звуковом формате. Звуковые команды могут помочь, например, лицам со слабым зрением во время бритья.
Альтернативно или дополнительно, система обратной связи может содержать осязательный модуль, выполненный с возможностью подачи команд в осязательном формате. Такая осязательная обратная связь может быть обеспечена модулем вибрации в самом устройстве для срезания волос, чтобы управлять движениями пользователя.
В варианте осуществления гибридной системы управления бритьем согласно изобретению базовое устройство содержит датчик изображений и контроллер, а устройство для срезания волос содержит систему обратной связи. В альтернативном варианте осуществления гибридной системы управления бритьем согласно изобретению базовое устройство содержит систему обратной связи, а устройство для срезания волос содержит датчик изображений и контроллер.
В другом варианте осуществления гибридной системы управления бритьем согласно изобретению базовое устройство реализуется компьютерным устройством, таким как планшет, или мобильным телекоммуникационным устройством, таким как смартфон.
В варианте осуществления вся система управления бритьем реализуется компьютерным устройством, мобильным телекоммуникационным устройством или ручным электрическим устройством для срезания волос. В случае компьютерного устройства или мобильного телекоммуникационного устройства, пользователь обеспечивается устройством для управления бритьем, которое будет управлять движениями пользователя, не нуждаясь в адаптированном устройстве для срезания волос.
В том случае, если система является ручным электрическим устройством для срезания волос, управление движениями пользователя может осуществляться самим устройством для срезания волос без необходимости в каком-либо дополнительном базовом устройстве, таком как адаптированное компьютерное устройство или мобильное телекоммуникационное устройство.
Согласно другому аспекту изобретения обеспечен способ управления движениями пользователя во время процедуры бритья, при этом способ содержит формирование изображения части тела пользователя, определение локального направления роста волос на теле пользователя, используя это изображение, генерацию команд относительно направления, в котором должно передвигаться по телу устройство для срезания волос в зависимости от определенного локального направления роста волос, и подачу команд пользователю.
Эти и другие аспекты изобретения станут очевидными и будут пояснены со ссылкой на варианты осуществления, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь варианты осуществления изобретения будут описаны только в качестве примеров со ссылкой на сопроводительные чертежи, на которых:
ФИГ.1 - схематическое представление системы управления бритьем согласно варианту осуществления изобретения;
ФИГ.2 - схематическое представление приводимого в качестве примера устройства для срезания волос в системе управления бритьем согласно варианту осуществления на фиг.1;
ФИГ.3 - схематическое представление другого варианта системы управления бритьем согласно изобретению;
ФИГ.4 - схематическое представление смартфона, действующего в качестве системы управления бритьем согласно изобретению;
ФИГ.5 - схематическое представление устройства для срезания волос, действующего в качестве системы управления бритьем согласно варианту осуществления настоящего изобретения;
ФИГ.6 - схематическое представление стороны, обращенной к коже пользователя, устройства для срезания волос, показанного на фиг.5;
ФИГ.7 - пример 2D изображения, созданного датчиком изображений, на котором каждый обнаруженный волос представлен линией в 2D изображении;
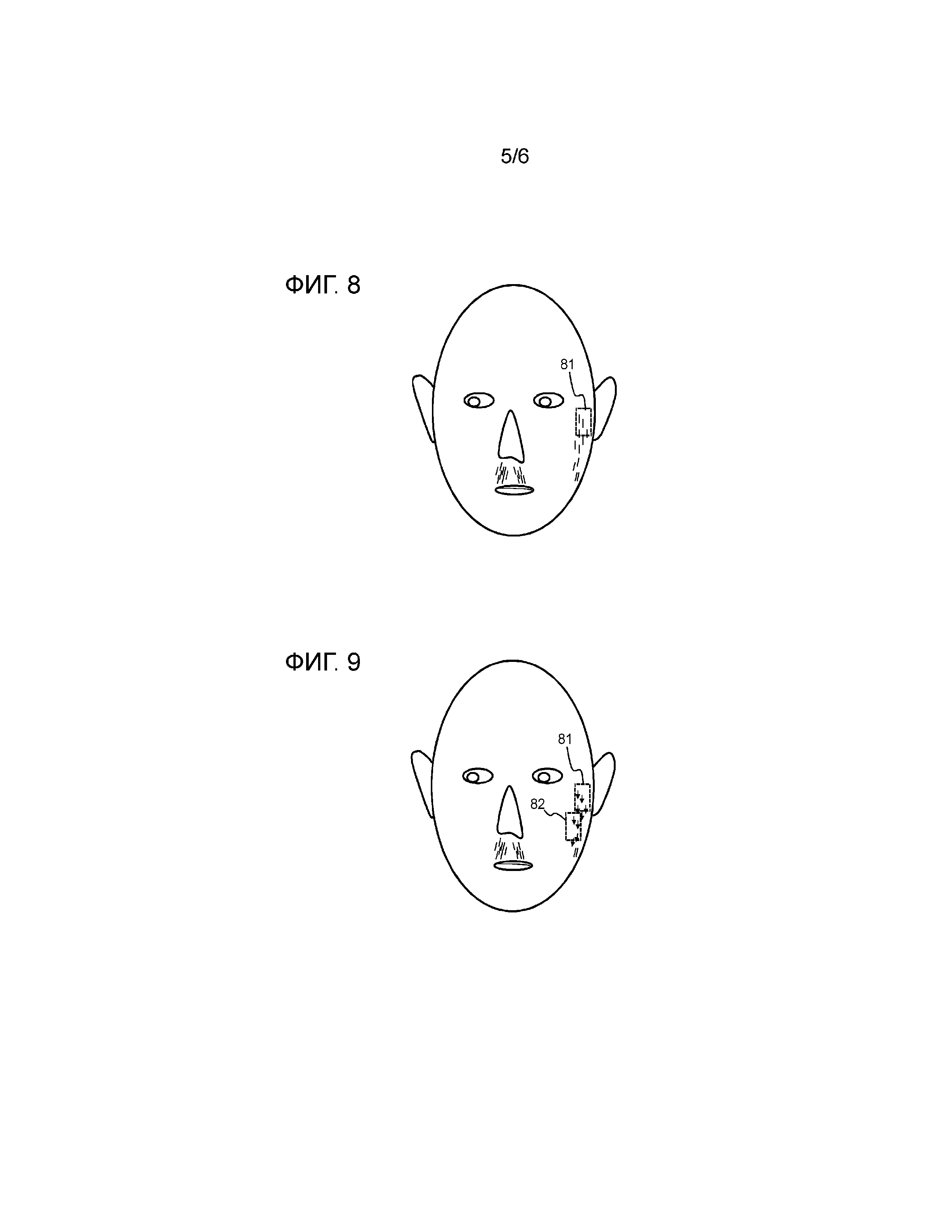
ФИГ.8 - представление лица, изображенного на фиг.7, с областью инициализации, где направление волос определено, используя эвристический подход;
ФИГ.9 - представление лица, изображенного на фиг.8, с областью инициализации и соседней областью, подлежащей обработке;
ФИГ.10 - пример изображения с линиями, представляющими волосы на бакенбарде, и линиями, представляющими тени волос; и
ФИГ.11 - представление лица, изображенного на фиг.10, на котором анализатор данных изображения определил локальное направление роста волос для некоторых волос, используя точку встречи первой и второй линий.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг.1 дано схематическое представление системы 10 управления бритьем согласно варианту осуществления изобретения. Система 10 содержит базовое устройство 50 и устройство 20 для срезания волос. Базовое устройство 50 содержит датчик 30 изображений и контроллер 40. В этом варианте осуществления базовое устройство дополнительно содержит модуль 52 связи для беспроводной связи с устройством 20 для срезания волос и осветительный элемент 53, выполненный с возможностью освещения части тела, с тем чтобы создавать тени волос на коже пользователя.
Базовое устройство 50 может быть планшетом, персональным компьютером или любым другим подходящим компьютерным устройством. Альтернативно, базовое устройство 50 может быть смартфоном, фаблетом или любым другим типом мобильного телекоммуникационного устройства, таким как Google Glass. Датчик 30 изображений выполнен с возможностью регистрации изображения части 81 тела пользователя 80. В примере на фиг.1 датчик 30 изображений будет регистрировать лицо 81 пользователя 80. Контроллер 40 может содержать анализатор 41 данных изображения, выполненный с возможностью определения локального направления роста волос, основываясь на данных в изображении. Следует отметить, что анализатор 41 данных изображения может быть программой пакета программного обеспечения, загруженной в контроллер или контроллером 40, или же он может быть отделен от контроллера 40, будучи отдельным компонентом аппаратного обеспечения в сочетании с контроллером 40. Анализатор 41 данных изображения может определять локальное направление роста волос на лице 81 пользователя, используя разные способы обработки изображений, как будет более подробно объяснено ниже со ссылкой на фиг.7-9.
На фиг.2 схематически представлен пример устройства 20 для срезания волос согласно варианту осуществления на фиг.1. Устройство 20 для срезания волос может быть ручной электрической бритвой. Однако должно быть очевидно, что устройство 20 для срезания волос может иметь альтернативную конфигурацию. Например, устройство 20 для срезания волос может быть ручным электрическим триммером для волос. Альтернативно устройство 20 для срезания волос может быть устройством для удаления волос с целью эпиляции (искусственное удаление волос).
Устройство 20 для срезания волос может передвигаться по части тела пользователя, например, по лицу 81, для бритья бороды. Устройство 20 для срезания волос содержит основной корпус 21 и режущую головку 22 на одном конце основного корпуса 21. На основном корпусе 21 определен участок 23 рукоятки. Основной корпус 21 и режущая головка 22 построены таким образом, что участок 23 рукоятки может удерживаться пользователем. Режущая головка 22 имеет режущий элемент 24. Режущий элемент 24 выполнен с возможностью сбривания волос. Режущий элемент 24 приводится в движение приводным механизмом 29. Приводной механизм 29 действует так, чтобы привести режущий элемент в рабочее состояние. В настоящем варианте осуществления приводной механизм 29 является электрическим двигателем.
Устройство 20 для срезания волос дополнительно содержит контроллер 400, систему 160 осязательной обратной связи и модуль 26 связи для беспроводной связи с модулем 52 связи в базовом устройстве 50. Контроллер 400 выполнен с возможностью управления приводным устройством 29, модулем 26 связи и системой 160 осязательной обратной связи.
В варианте осуществления на фиг.1 датчик 30 изображений в базовом устройстве 50 действует как средство для регистрации изображения части 81 тела пользователя 80. Альтернативно или дополнительно, датчик 30 изображений может действовать как идентификатор положения, выполненный с возможностью генерации информации, указывающей положение устройства 20 для срезания волос относительно части тела, подлежащей обработке. То есть идентификатор положения способен генерировать информацию, указывающую положение устройства 20 для срезания волос относительно зарегистрированной части 81 тела. Должно быть понятно, что может использоваться альтернативное средство или дополнительное средство генерации информации, указывающее положение устройства 20 для срезания волос. Примеры такого идентификатора положения включают в себя системы обнаружения электромагнитного поля, микроволновые системы обнаружения, инерциальные измерительные системы и/или ультразвуковые системы обнаружения.
В описанном выше варианте осуществления датчик 30 изображений и контроллер 40 образуют часть базового устройства 50, например, планшета 50. Альтернативно, датчик 30 изображений и контроллер 40 располагаются отдельно. В одном варианте осуществления контроллер 40 в устройстве 20 для срезания волос выполнен с возможностью определения локального направления роста волос на теле пользователя, используя изображение, созданное датчиком 30 изображений, и генерации команд относительно направления, в котором должно передвигаться устройство 20 для срезания волос в зависимости от определенного локального направления роста волос.
Датчик 30 изображений, контроллер 40 и устройство 20 для срезания волос сообщаются друг с другом. В настоящем варианте осуществления датчик 30 изображений и контроллер 40 сообщаются посредство проводного соединения. Контроллер 40 и устройство 20 для срезания волос сообщаются посредством беспроводного соединения. Предусматриваются альтернативные решения. Например, контроллер 40 и устройство 20 для срезания волос могут быть соединены проводным соединением, и/или контроллер 40 и датчик 30 изображений могут быть соединены беспроводным соединением. Беспроводные модули, например, радио- или инфракрасные передатчики и приемники, служат для беспроводных соединений между разными компонентами. Должно быть понятно, что могут быть использованы Wi-Fi™ и Bluetooth™ технологии.
Датчик 30 изображений, действующий в качестве модуля формирования изображений, может быть глубинным или диапазонным датчиком изображений. То есть, датчик 30 изображений использует диапазонное формирование изображений для определения положения элементов внутри поля зрения или внутри зоны 31 оптического считывания датчика 30 изображений (см. фиг.1). Датчик 30 изображений может производить двухмерное изображение с величиной расстояния элементов внутри зоны 31 оптического считывания относительно заданного положения, такого как сам датчик изображений. В настоящем варианте осуществления датчик 30 изображений выполнен с возможностью использования техники структурированного света для определения положения, включая сюда расстояние, элементов внутри зоны 31 оптического считывания датчика 30 изображений. Такая техника освещает поле зрения специально разработанной картиной освещения. Преимуществом такого варианта осуществления является то, что глубина может быть определена в каждый данный момент времени, используя всего лишь одно изображение отраженного света. Альтернативно, датчик 30 изображений выполняется с возможностью использования техники временного включения освещения для определения положения, включающего в себя расстояния, элементов внутри зоны 31 оптического считывания датчика 30 изображений. Преимущество такого варианта осуществления состоит в том, что число движущихся частей является минимальным. Другие технические решения включают в себя эхографические технологии, стереотриангуляцию, триангуляцию световым листом, интерферометрию и кодированную апертуру.
Датчик 30 изображений может быть цифровой камерой, способной генерировать данные изображений, представляющие объект съемки, принятый датчиком камеры. Данные изображений могут быть использованы для сбора последовательности кадров как видеоданных. Зона 31 оптического считывания является полем зрения, в пределах которого оптические волны, отражающиеся от объектов или испускаемые ими, обнаруживаются датчиком изображений. Датчик 30 изображений может обнаруживать свет в видимой части спектра, но он может также быть инфракрасным датчиком изображений.
Датчик 30 изображений, действующий как модуль формирования изображений, может быть выполнен с возможностью генерации информации, указывающей положение элементов внутри зоны 31 оптического считывания. Датчик 30 изображений генерирует информацию, основываясь на данных изображения, генерируемых датчиком изображений. Датчик 30 изображений, действующий как модуль формирования изображений, может создавать визуальное изображение с глубиной, например, карту RGB-D. Датчик 30 изображений может создавать визуальное изображение с картой глубины элементов внутри зоны 31 оптического считывания датчика 30 изображений. Предусматриваются альтернативные средства генерации информации, указывающей положение элементов внутри зоны 31 оптического считывания. Например, датчик 30 изображений может создавать глубинное изображение (D-карту) элементов внутри зоны 31 оптического считывания.
Датчик 30 изображений может быть выполнен с возможностью генерации визуального изображения с картой глубины с 30 кадрами за минуту. Кроме того, датчик 30 изображений может иметь разрешающую способность 640×480. Диапазон глубин может находиться в пределах от 0,4 м до 1,5 м. Угол поля зрения может лежать между 40 градусами и 50 градусами. Это обеспечивает подходящую для пользователя область для расположения в пределах зоны 31 оптического считывания. Разрешающая способность по глубине может настраиваться равной около 1,5 м в пределах зоны 31 оптического считывания.
Хотя приведенные выше параметры были найдены подходящими для точного определения положения в целях срезания волос, должно быть понятно, что могут быть использованы альтернативные параметры. Например, фильтр (не показан) может быть использован для повышения точности существующего разрешения.
В варианте осуществления система может быть приспособлена к конкретной используемой бритве. В случае электробритв, срезающих в уникальном направлении роста волос, модель бритвы может быть автоматически обнаружена контроллером 40, если модель оборудована системой связи по видимому свету, которая обнаруживается датчиком 30 изображений, используемым для распознавания лица пользователя.
На фиг.3 схематически представлен другой вариант осуществления системы 10. Система 10 содержит базовое устройство 50 и устройство 20 для срезания волос, сообщающиеся друг с другом через проводное соединение. Базовое устройство 50 содержит датчик 30 изображений и контроллер 40. Базовое устройство 50 содержит также пользовательский вводной блок 90, энергонезависимую память 100, RAM 110, динамик 120, дисплей 130 и источник питания 140. Устройство 20 для срезания волос в этом варианте осуществления содержит приводное устройство 29, инерциальный измерительный блок (IMU) 150 и вибрационный двигатель 160, действующий как система 160 осязательной обратной связи.
Память 100 может быть энергонезависимой памятью, такой как постоянная память(ROM), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Энергонезависимая память 100 хранит, среди прочих вещей, операционную систему. Энергонезависимая память 100 может располагаться дистанционно. Контроллер 40 может быть способен обращаться к одному или более объектам, таким как один или более профилей, хранимым в памяти 100, и загружать один или более хранимых объектов в RAM 110.
RAM 110 используется контроллером 40 для временного запоминания данных. Операционная система может содержать код, который, при выполнении его контроллером 40 в сочетании с RAM 110, управляет работой каждого из компонентов аппаратного обеспечения системы 10. Контроллер 40 может быть способен обеспечивать, чтобы один или более объектов, таких как один или более профилей, запоминались дистанционно или локально энергонезависимой памятью 100 и/или в RAM 110.
Источник 140 питания может быть батареей, выполненной с возможностью подачи питания как в базовое устройство 50, так и в устройство 20 для срезания волос. Следует отметить, что устройство 20 для срезания волос может иметь отдельный источник питания (не показан). В настоящем варианте осуществления источник питания является встроенной заряжаемой аккумуляторной батареей, однако должно быть понятно, что возможно альтернативное средство электропитания, например, шнур электропитания, который подсоединяет систему 100 к внешнему источнику электроэнергии.
Контроллер 40 может иметь любую подходящую форму. Например, контроллер 40 может быть микроконтроллером, множеством контроллеров, процессором или множеством процессоров. Контроллер 40 может быть образован одним или несколькими модулями.
В настоящем варианте осуществления динамик 120 расположен в базовом устройстве 50. Альтернативно, динамик 120 может находиться в устройстве 20 для срезания волос или располагаться отдельно от него. При таком решении динамик 120 будет располагаться близко к голове пользователя, чтобы позволить пользователю легко услышать звуковой сигнал, издаваемый динамиком 120. Динамик 120 срабатывает в ответ на сигналы от контроллера 40, чтобы обеспечить звуковые сигналы для пользователя. Должно быть понятно, что в некоторых вариантах осуществления динамик 120 может отсутствовать.
В настоящем варианте осуществления дисплей 130 располагается в базовом устройстве 50, действуя в качестве системы обратной связи. Альтернативно, дисплей 130 может располагаться на устройстве 20 для срезания волос или располагаться отдельно от него. Дисплей 130 срабатывает в ответ на сигналы от контроллера 40, чтобы произвести визуальные индикаторы или сигналы для обеспечения руководящих указаний пользователю. Должно быть понятно, что в некоторых вариантах осуществления дисплей 130 может отсутствовать.
Система обратной связи может также включать в себя вибрационный двигатель 160, например, чтобы обеспечить осязательную обратную связь для пользователя. Вибрационный двигатель или другое средство осязательной обратной связи располагается в устройстве 20 для срезания волос.
Пользовательский вводной юлок 90 в настоящем варианте реализации включает в себя один или более аппаратных ключей (не показаны), таких как кнопка или выключатель. Пользовательский вводной блок 90 расположен на базовом устройстве 50, хотя должно быть понятно, что пользовательский вводной блок может находиться на устройстве 20 для срезания волос или быть их сочетанием. Пользовательский вводной блок 90 используется, например, чтобы позволить пользователю выбрать режим работы, привести в действие систему 10 и/или выключить систему 10.
Инерциальный измерительный блок (IMU) 150 находится в устройстве 20 для срезания волос. В настоящей конфигурации IMU 150 размещен в основном корпусе 21 устройства 20 для срезания волос. IMU известны, и поэтому подробное описание здесь отсутствует. IMU 150 выполнен с возможностью обеспечения считывания относительного перемещения (передвижения и поворота) по шести осям. IMU 150 выполнен с возможностью генерации информации, указывающей положение устройства 20 для срезания волос. Информация, генерируемая IMU 150, доставляется в контроллер 40.
Хотя в этом и в других описываемых вариантах осуществления идентификатор положения является модулем формирования изображений, должно быть понятно, что альтернативное средство или дополнительное средство генерации информации, указывающей положение части 81 тела, подлежащей обработке, и устройства 20 для срезания волос, может быть использовано. Примеры такого идентификатора положения включают в себя обнаружение электромагнитного поля, микроволновое обнаружение, инерциальное измерение и/или ультразвуковое обнаружение. Подробное описание альтернативных решений опущено. Датчик 30 изображений, действующий как идентификатор положения, может отсутствовать, и IMU 150 может быть использован для генерации информации, указывающей положение устройства 20 для срезания волос. При таком построении информация, указывающая положение устройства 20 для срезания волос, генерируемая IMU 150, подается в контроллер 40 или выбирается контроллером 40.
Вместо обеспечения информации положения IMU 150 может быть также использован для генерации информации, указывающей передвижение устройства 20 для срезания волос. Зарегистрированное передвижение может быть использовано для выдачи правильных команд пользователю. Контроллер 40 может подать команду пользователю на регулировку направления передвижения устройства 20 для срезания волос, чтобы получить желаемое передвижение устройства по отношению к определенному направлению роста. Так что в этом случае отсутствует необходимость в информации о точном местоположении устройства 20 для срезания волос.
В альтернативных вариантах осуществления идентификатор положения имеет или включает в себя альтернативное средство для генерации информации, указывающей положение одного или более объектов, в частности, части тела, подлежащей обработке, и устройства 20 для срезания волос. Такое альтернативное средство может быть использовано взамен или в сочетании либо с модулем формирования изображений, либо с IMU, или же и с тем и с другим. Например, идентификатор положения может быть выполнен с возможностью генерации информации, указывающей положение устройства 20 для срезания волос, основываясь на акустическом обнаружении, ультразвуковом обнаружении, инфракрасных сигналах, обнаружении времени и/или углах распространения сигнала, и/или может быть использован другой способ анализа сигналов.
Устройство 20 для срезания волос может включать в себя один или более акселерометров, гироскоп или другие датчики для мониторинга положения и/или ориентации, чтобы обнаруживать положение и ориентацию устройства 20 для срезания волос.
В одном варианте осуществления идентификатор положения выполнен с возможностью генерации информации, указывающей положение обрабатывающего устройства 20, основываясь на обнаружении магнитного поля. В таком варианте осуществления идентификатор положения содержит один или более детекторов электромагнитного поля (не показаны). Один или более детекторов электромагнитного поля выполнены с возможностью обнаружения изменений в электромагнитном поле, чтобы генерировать информацию, указывающую положение обрабатывающего устройства 20 по отношению к части тела, подлежащей обработке, основываясь на обнаруженном электромагнитном поле.
В одном варианте осуществления один или более индикаторов положения (не показаны), которые обнаруживаются идентификатором положения, могут устанавливаться на часть тела, такую как часть тела, подлежащая обработке. Такие индикаторы положения могут быть неактивными, или они могут быть активными, причем в этом последнем случае они, например, передают сигнал, который должен обнаруживаться идентификатором положения. Такие сигналы могут включать в себя электромагнитные сигналы, акустические сигналы, ультразвуковые сигналы, инфракрасные сигналы, визуальные сигналы и/или оптические сигналы.
Идентификатор положения может устанавливаться на часть тела, подлежащую обработке, генерировать информацию, указывающую положение части тела, подлежащей обработке, и/или устройства для срезания волос, основываясь на сигналах, принятых от другой части системы, например, от устройства 20 для срезания волос. Идентификатор положения может находиться на устройстве 20 для срезания волос. Любое сочетание описанных выше средств для генерации информации, указывающей положение устройства 20 для срезания волос по отношению к части тела, подлежащей обработке, также возможно.
Система 10 на фиг.1 может приводиться в рабочее состояние расположением базового устройства 50 в подходящем месте для срезания волос. То есть базовое устройство 50 располагается таким образом, чтобы пользователь мог располагать часть тела, подлежащую обработке, например, голову, в пределах зоны 31 оптического считывания. Например, датчик 30 изображений располагается приблизительно на той же высоте, на которой будет находиться голова пользователя во время работы системы 10. В варианте осуществления, в котором датчик 30 изображений отделен от базового устройства 50 или в котором базовое устройство 50 отсутствует, датчик 30 изображений располагается, как необходимо. Ручное устройство 20 для срезания волос удерживается пользователем.
Датчик 30 изображений выполнен с возможностью регистрации изображения части тела пользователя, контроллер 40 выполнен с возможностью определения локального направления роста волос, используя это изображение, и система обратной связи может целиком содержаться в одном устройстве, таком как компьютерное устройство или телекоммуникационное устройство. На фиг.4 схематически представлен смартфон 50, действующий как устройство управления бритьем, согласно варианту осуществления настоящего изобретения. Смартфон 50 содержит дисплей 130, действующий как система обратной связи, выполненная с возможностью подачи команд пользователю о направлении, в котором должно передвигаться устройство 20 для срезания волос в зависимости от обнаруженного локального направления роста волос. Датчик 30 изображений получает изображение лица 81, и контроллер 40 обнаруживает локальное направление роста бороды, используя средство обработки изображений. Локальное направление роста бороды может быть транслировано в персонализированное предписание для бритья, содержащее команды относительно этапов предпочтительной последовательности передвижений.
Картина направления роста волос может быть определена, используя локальные ячейки (то есть окна сканирования), в которых используется программа обнаружения линий. Примером такой программы является преобразование Хафа. Применяя фильтр Хафа по части тела, подлежащей бритью, может быть получена карта, представляющая ориентацию волос. Направления роста волос могут, например, быть определены, используя эвристический подход по известным направлениям роста волос в определенных положениях на лице и общие факторы направления распространения волос. Например, бакенбарды и усы обычно растут в направлении вниз по отношению к лицу, что может быть использовано в качестве точек инициализации. Ячейка итеративно перемещается вдоль направления инициализации в ранее обнаруженной ориентации. Разные размеры могут быть присвоены ячейке в зависимости от размера заданного лезвия, которое будет использовано для последовательности. Части, не накрываемые перемещением фильтра, могут быть интерполированы до их ближайших значений.
Смартфон 50 может дать совет по бритью на своем дисплее 130, показав фильм с персонализированными командами или дополнив изображение графической информацией, показывающей оптимальную картину бритья. Это может быть статической процедурой. Смартфон 50 может также прослеживать процесс бритья, осуществляя мониторинг траектории устройства 20 для срезания волос, и подавать следующие команды пользователю 80. Кроме того, эта траектория может также использоваться для указания того, что пользователю следует изменить скорость манипулирования устройством 20 для срезания волос.
Следует отметить, что вместо соответствующим образом запрограммированного смартфона может быть использован другой тип телекоммуникационного устройства, такой как фаблет. Кроме того, устройство для управления бритьем может быть реализовано соответственно запрограммированным компьютерным устройством, таким как лэптоп, ноутбук или персональный компьютер.
На фиг.5 схематически представлено устройство 20 для срезания волос, действующее как система управления бритьем, согласно варианту осуществления настоящего изобретения. Устройство 20 для срезания волос содержит контроллер 40, приводное устройство 29 и систему 160 осязательной обратной связи. Устройство 20 для срезания волос содержит также датчик 25 изображений, который располагается на стороне устройства 20 для срезания волос, обращенной к коже пользователя во время нормального использования устройства. На фиг.6 схематически показана сторона устройства 20 для срезания волос, обращенная к коже пользователя во время нормального использования устройства 20. В этом примере датчик 25 изображений располагается в углубленной части бритвенной сетки 61. Это позволит осуществлять регистрацию части тела, обрабатываемой в текущий момент времени устройством 20 для срезания волос. Следует отметить, что датчик 25 изображений может располагаться в других местах на устройстве 20 для срезания волос.
Модуль 30 формирования изображений может быть датчиком 30 изображений, выполненным с возможностью создания 2D изображения, в котором каждый обнаруженный волос представлен линией в 2D изображении. Пример такого 2D изображения, обозначенного позицией 70, показан на фиг.7. Это изображение может быть черно-белым изображением, содержащим часть тела, такую как лицо. Волосы на лице обнаруживаются и представляются линиями 71. В этом примере для простоты показаны только некоторые из обнаруженных волос 71. Анализатор 41 данных изображения может быть выполнен с возможностью обнаружения локального направления роста волос, используя алгоритм распространения, который начинается с определения направления роста волос в области инициализации, обозначенной рамкой 81 на фиг.8, где показано лицо, изображенное на фиг.7. Эвристическая информация по известным направлениям роста волос используется для определения направления роста волос в этой области 81 инициализации. Примером эвристической информации может быть то, что волосы на бакенбардах мужчин растут в направлении вниз. Это означает, что линии в области 81 могут быть преобразованы анализатором 41 данных изображения в стрелки, направленные вниз, как видно на фиг.9, где показано лицо, изображенное на фиг.8. После того как будет осуществлено преобразование области 81 инициализации, линии в соседней области 82, примыкающей или частично перекрывающейся с областью 81 инициализации, преобразуются в стрелки, используя ориентацию каждой из линий, представляющих волосы в соседней области, и их относительное положение по отношению к области 81 инициализации или ранее обработанной области. Результат такого следующего этапа показан на фиг.9.
В варианте осуществления система содержит осветительный элемент 53, показанный на фиг.1, который выполнен с возможностью освещения части тела, с тем чтобы создать тени волос на коже пользователя, причем в 2D изображении каждый обнаруженный волос представляется первой линией, обозначающей волос, и второй линией, обозначающей тень волоса. На фиг.10 показан пример изображения 94 с линиями 95, представляющими волосы на бакенбарде, и линиями 96, представляющими тени волос. На фиг.11 показано лицо, изображенное на фиг.10, на котором анализатор 41 данных изображения определил локальное направление роста волос, используя точку встречи первой и второй линий. Следует отметить, что анализатор 41 данных изображения может определять точки встречи волос и относящихся к ним теней сразу для полной картины, или, альтернативно, анализатор 41 может использовать алгоритм распространения, чтобы улучшить результат, так как не все области могут обрабатываться, только глядя на тени, поскольку некоторые области могут не иметь теней, как, например, усы на фиг.10 и 11, из-за неоптимального расположения осветительного элемента 53 по отношению к обнаруженным волосам. Поэтому следует заметить, что осветительный элемент 35 может располагаться на базовом устройстве 50 и/или на самом устройстве 20 для срезания волос в зависимости от применения и используемых алгоритмов обнаружения.
В варианте осуществления модуль 30 формирования изображений выполнен с возможностью автоматической регистрации последовательности 2D изображений, при этом анализатор 41 данных изображения выполнен с возможностью создания 3D изображения части тела, используя последовательность 2D изображений. Анализатор 41 данных изображения будет затем определять локальное направление роста волос, анализируя 3D изображение.
Модуль 30 формирования изображений альтернативно может быть выполнен с возможностью создания 3D изображения, в котором каждый обнаруженный волос представлен 3D линией. Анализатор 41 данных изображения будет определять локальное направление роста волос, анализируя 3D изображение и преобразуя 3D изображение, например, в карту со стрелками, указывающими направление роста волос.
Вышеупомянутое определенное направление роста волос может быть использовано для создания команд для пользователя. Например, в случае бритья бороды, если направление роста определено вниз, команды для этой части лица на первом этапе могут соответствовать направлению роста (звуковая или визуальная команда может быть такой: “передвигайте бритву в направлении вниз”), наряду с передвижением бритвы в противоположном направлении на следующем этапе, с тем чтобы улучшить результат бритья.
В варианте осуществления устройство 20 для срезания волос выполнено с возможностью обеспечения отслеживания его положения по отношению к лицу пользователя. Представленный в этом варианте датчик 25 изображений определяет локальное направление роста волос, используя средство обработки изображений. Положение устройства для срезания волос и локальное направление роста волос транслируются в персонализированные команды для бритья. Устройство 20 для срезания волос может подавать команду пользователю посредством дисплея (не показан), системы 160 осязательной обратной связи, звукового сигнала или другим способом взаимодействия с пользователем. Следует отметить, что передвижение устройства 20 может перестраиваться акселерометром, и устройство управления бритьем может также указывать, что пользователю следует изменить манипулирование устройством 20 для срезания волос.
При использовании традиционного устройства для срезания волос пользователь будет определять траекторию бритья, основываясь на своем опыте и общем ощущении. Однако многие пользователи не осведомлены о возможности улучшения результата и навыков бритья. Автоматически определяя локальное направление роста волос и используя определенные направления роста волос для выдачи пользователю команд по оптимальному управлению бритьем, описанная выше система и/или устройство позволит пользователю улучшить результат бритья и сократить необходимое для бритья время.
В варианте осуществления система 10 работает для обеспечения информации, указывающей путь и/или угол ориентации устройства для срезания волос по отношению к части тела, подлежащей обработке, и для приведения в действие модуля обратной связи с целью обеспечения обратной связи с пользователем, основываясь на пути и/или угле ориентации обрабатывающего устройства, определенных контроллером 40. Контроллер 40 может быть выполнен с возможностью определения пути устройства 20 для срезания волос, основываясь на информации положения, генерируемой датчиком 30 изображений, действующим в качестве идентификатора положения. В частности, контроллер 40 может быть выполнен с возможностью определения пути устройства 20 для срезания волос по отношению к части тела, подлежащей обработке, осуществляя мониторинг информации, генерируемой датчиком 30 изображений, и определяя изменение положения устройства 20 для срезания волос относительно части тела, подлежащей обработке, основываясь на определенном изменении положения устройства 20 для срезания волос относительно части тела, подлежащей обработке, за заданный период времени. Контроллер 40 может также, или альтернативно, определять угол ориентации устройства 20 для срезания волос относительно части тела, подлежащей обработке. Альтернативно или в сочетании с этим, датчик 30 изображений может быть выполнен с возможностью вычисления абсолютного угла ориентации устройства 20 для срезания волос относительно части тела, подлежащей обработке, основываясь на ориентации элементов основного корпуса 21 и/или режущей головки 22 устройства 20 для срезания волос. При таком построении можно определять угол ориентации без обнаружения какого-либо передвижения устройства 20 для срезания волос по отношению к части тела, подлежащей обработке.
Хотя в приведенном выше варианте осуществления изображение части тела соответствует изображению части тела, подлежащей обработке, должно быть понятно, что изобретение не ограничивается этим. Например, датчик 30 изображений может генерировать данные изображения, включающие в себя данные, представляющие нижнюю часть головы пользователя, и система 10 может экстраполировать эти данные для генерации информации, указывающей верхнюю часть головы пользователя.
В варианте осуществления, когда датчик 30 изображений не способен обеспечить информацию, указывающую положение устройства 20 для срезания волос, или указывает, что устройство 20 для срезания волос не найдено среди данных изображения, представляющих объект съемки, принятый чувствительным элементом датчика изображений, в пределах зоны 21 оптического считывания, контроллер 40 выполняется с возможностью обращения к информации, указывающей положение устройства 20 для срезания волос, предоставляемой IMU 150. IMU 150 располагается в устройстве 20 для срезания волос и может приводиться в рабочее состояние от операционной системы 10 или только когда оно приводится в действие контроллером 40, например, когда датчик 30 изображений не способен обнаружить устройство 20 для срезания волос, которое находится за пределами зоны 31 оптического считывания датчика 30 изображений.
IMU 150 выполняется с возможностью генерации информации, указывающей положение устройства 20 для срезания волос, основываясь на собственном положении IMU в устройстве 20 для срезания волос. IMU 150 обеспечивает считывание относительного перемещения - передвижения и поворота - по 6 осям. IMU 150 выполняется с возможностью генерации информации, указывающей путь устройства 20 для срезания волос относительно части тела, подлежащей обработке. Кроме того, IMU 1250 также, или альтернативно, выполняется с возможностью генерации информации, указывающей угол ориентации устройства 20 для срезания волос относительно части тела, подлежащей обработке. Контроллер 40 может быть выполнен с возможностью калибровки IMU 150 на основе информации, генерируемой датчиком 30 изображений, когда устройство 20 для срезания волос находится в пределах зоны 31 оптического считывания. Это помогает устранить ошибки позиционирования, связанные с показаниями IMU 150 с течением времени.
Хотя в настоящем варианте осуществления контроллер 40 выполнен с возможностью обращения к информации, генерируемой IMU 150, когда обрабатывающее устройство находится за пределами зоны оптического считывания датчика изображений, должно быть понятно, что контроллер 40 может быть выполнен с возможностью обращения к информации, генерируемой модулем формирования изображений и модулем системы инерциального наведения через использование системы 10. В альтернативном варианте осуществления IMU 150 может отсутствовать. В таком варианте осуществления информация, указывающая положение, путь и/или угол ориентации устройства 20 для срезания волос по отношению к части тела, подлежащей обработке, может быть определена экстраполяцией данных изображения, представляющих объект съемки, принятый чувствительным элементом датчика изображений в пределах зоны 31 оптического считывания. Альтернативно, контроллер 40 может быть выполнен с возможностью обеспечения обратной связи с пользователем, например, посредством звуковых сигналов, чтобы дать указание пользователю на изменение направления его взгляда по отношению к датчику 30 изображений, с тем чтобы устройство 20 для срезания волос находилось в пределах зоны 31 оптического считывания и датчик 30 изображений был способен генерировать данные изображения, представляющие объект съемки, принятый чувствительным элементом датчика изображений в пределах зоны 31 оптического считывания.
Когда обеспечивается информация, указывающая положение части тела, подлежащей обработке, в данном случае головы пользователя, и указывающая положение устройства 20 для срезания волос, можно определить положение, путь и/или угол ориентации устройства 20 для срезания волос относительно части тела, подлежащей обработке, основываясь на изображении части тела и устройства 20 для срезания волос. Относительные положения могут быть вычислены на основе векторного вычитания. Поэтому относительные положения могут быть легко определены.
Контроллер 40 может быть выполнен с возможностью обращения к эталонному профилю части тела, подлежащей обработке. Эталонный профиль может быть запомнен в справочной таблице. Эталонный профиль может быть запомнен в памяти 100. В таком построении контроллер 40 выполняется с возможностью обращения к памяти 100, чтобы получить доступ к эталонному профилю. В одном варианте осуществления эталонный профиль запоминается в RAM 110. Эталонный профиль обеспечивает информацию о части тела, подлежащей обработке. Эталонный профиль может также обеспечивать информацию о желаемом пути и/или угле ориентации устройства 20 для срезания волос. Эталонный профиль может быть связан и запомнен со ссылкой на систему координат. В одной такой конфигурации используется полярная система координат, в которой каждая позиция на части тела, подлежащей обработке, определяется расстоянием от фиксированной точки и углом относительно фиксированного направления. В другой конфигурации используется прямоугольная система координат. Для каждой точки задается состояние, такое как значение, рабочих характеристик. Альтернативно, эталонный профиль может определять карту части тела пользователя, подлежащей обработке. В одном варианте осуществления карта подразделяется на заданные области, и состояние рабочих характеристик задается для каждой области.
Контроллер 40 может быть выполнен с возможностью отслеживания пути устройства 20 для срезания волос относительно части тела, подлежащей обработке. Контроллер 40 может быть выполнен с возможностью регистрации отслеживаемого пути устройства 20 для срезания волос. То есть контроллер 40 может быть выполнен с возможностью определения пути устройства 20 для срезания волос и обеспечивать, чтобы информация, указывающая путь устройства 20 для срезания волос, запоминалась в RAM 110. Альтернативно, контроллер 40 выполняется с возможностью обеспечения запоминания информации в памяти 100.
Контроллер 40 может быть выполнен с возможностью сравнения информации, указывающей путь устройства 20 для срезания волос, с эталонным профилем, обеспечивающим информацию, указывающую часть тела, подлежащую обработке. Поэтому контроллер 40 способен определить область части тела, подлежащей обработке, которая уже была обработана. То есть контроллер 40 способен определить область части тела, подлежащей обработке, которая уже была обработана, основываясь на определенном пути устройства 20 для срезания волос и, если требуется, на ширине и/или площади основания режущего элемента 24. При таком построении контроллер 40 способен определить область, через которую прошел режущий элемент 24 устройства 20 для срезания волос. Контроллер 40 может быть выполнен с возможностью регистрации того, что область части тела, подлежащей обработке, уже была обработана, когда определяется, что режущий элемент 24 прошел по ней вдоль какого-либо пути относительно части тела. В альтернативном варианте осуществления контроллер 40 выполняется с возможностью регистрации того, что область части тела, подлежащей обработке, уже была обработана, когда контроллер определяет, что режущий элемент 24 прошел по ней вдоль одного или более заданных путей.
В варианте осуществления, в котором контроллер 40 выполнен с возможностью регистрации того, что область части тела, подлежащей обработке, уже была обработана, когда контроллер определяет, что режущий элемент 24 прошел по ней вдоль одного или более заданных путей относительно части тела, подлежащей обработке, один или более заданных путей определяются контроллером 40, обращающимся к эталонному профилю. Эталонный профиль обеспечивает информацию о направлении роста волос в целом по части тела, подлежащей обработке для каждого положения устройства 20 для срезания волос по отношению к части тела, подлежащей обработке. Информация, запомненная эталонным профилем, может быть предсказанной или зарегистрированной. Хотя в настоящем варианте осуществления эталонный профиль обеспечивает информацию о направлении роста волос, в другом варианте осуществления эталонный профиль предоставляет только желаемый путь для каждого положения устройства 20 для срезания волос по отношению к части тела, подлежащей обработке. Информация, запомненная эталонным профилем, сообщается и запоминается по отношению к системе координат. В одной такой конфигурации используется полярная система координат, в которой каждая позиция на части тела, подлежащей обработке, определяется расстоянием от фиксированной точки и углом относительно фиксированного направления. В другой конфигурации используется прямоугольная система координат. Для каждой точки в системе координат задается информация, указывающая направление роста волос. Альтернативно, эталонный профиль может определять карту части тела пользователя, подлежащей обработке. В одном варианте осуществления карта подразделяется на заданные области, и информация, указывающая направление роста волос, задается для каждой области.
Хотя в описанных выше вариантах осуществления датчик изображений является глубинным датчиком изображений, должно быть понятно, что может быть использован альтернативный модуль формирования изображений. Например, может быть использована альтернативная видеосистема, действующая в качестве модуля формирования изображений. Такая альтернативная видеосистема может включать в себя недиапазонный датчик изображений, например, использующий технику восстановления объекта, или стереоскопическое видение, временный анализ видеоизображения для восстановления диапазонных данных и обнаружения положения головы и устройства для срезания волос, анализ изображений телевизионного датчика, анализ данных от ультразвуковых датчиков и/или анализ данных от емкостных датчиков.
В вариантах осуществления, представленных здесь, система 10 описана со ссылкой на пользователя системы 10, который является лицом, подлежащим обработке. То есть, пользователь использует систему, чтобы постричь/сбрить свои собственные волосы. Однако должно быть понятно, что в альтернативном варианте осуществления пользователь является лицом, использующим систему 10, чтобы постричь/сбрить волосы на теле другого человека.
Предполагаются альтернативные варианты осуществления, в которых используется гибридная система, в которой система обратной вязи выдает пользователю грубую оценку положения, где должно располагаться устройство 20 для срезания волос, и устанавливаются мелкие направления действий для устройства 20 для срезания волос посредством, например, осязательной обратной связи.
Должно быть понятно, что термин “содержащий” не исключает другие устройства или этапы и что единственное число не исключает множественности. Простой факт, что определенные меры изложены во взаимно отличающихся зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано для обеспечения преимущества. Любые ссылочные позиции в формуле изобретения не должны восприниматься как ограничивающие объем этой формулы изобретения.
Хотя пункты формулы изобретения были сформулированы в данной заявке применительно к конкретным сочетаниям признаков, должно быть понятно, что объем раскрытия настоящего изобретения также включает в себя любые новые признаки или любые новые сочетания признаков, раскрытых здесь либо явно, либо косвенно, или любое обобщение их, независимо от того, относятся ли они к тому же изобретению, которое заявлено в любом пункте формулы изобретения, и смягчают ли они любую или все из тех же технических проблем, как это делает исходное изобретение. Заявители настоящим обращают внимание на то, что новые пункты формулы изобретения могут быть сформулированы применительно к таким признакам и/или сочетаниям признаков во время рассмотрения настоящей заявки или любой последующей заявки, вытекающей из нее.
Реферат
Настоящее изобретение относится к системе (10) управления бритьем для управления движениями пользователя во время процедуры бритья, причем эта система содержит датчик (30) изображений, выполненный с возможностью регистрации изображения части тела пользователя, анализатор (41) данных изображения, выполненный с возможностью определения локального направления роста волос, основываясь на данных в изображении, контроллер (40), выполненный с возможностью генерации команд относительно направления, в котором должно передвигаться устройство (20) для срезания волос в зависимости от определенного локального направления роста волос, и систему (130) обратной связи, выполненную с возможностью подачи команд пользователю. 2 н. и 17 з.п. ф-лы, 11 ил.
Комментарии