Система и способ для косметической обработки и визуализации - RU2547180C2
Код документа: RU2547180C2
Чертежи


















Описание
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СВЯЗАННЫЕ ЗАЯВКИ
[0001] Эта заявка заявляет приоритет над предварительной патентной заявкой США №61/059,477, поданной 6 июня 2008 г., полностью включенной в настоящую заявку по ссылке.
УРОВЕНЬ ТЕХНИКИ
[0002] Варианты реализации настоящего изобретения, в общем, относятся к устройствам для обработки ультразвуком и визуализации и более конкретно относятся к ультразвуковым устройствам, содержащим преобразующий зонд, действующий для излучения и приема ультразвуковой энергии для косметической обработки и визуализации.
[0003] В целом, популярная косметическая процедура для уменьшения морщин в области лба на лице субъекта представляет собой натяжение кожи лба, во время которого части мышечных, жировых, фасциальных и других тканей в области лба инвазивно вырезаются, удаляются и/или парализуются с целью уменьшения или устранения морщин со лба. Традиционно натяжение кожи лба требует разреза, который начинается у одного уха и проходит по передней части головы вдоль линии волос до другого уха. Менее инвазивная процедура натяжения кожи лба известна как эндоскопический подъем, во время которого разрезы меньшего размера выполняются вдоль лба и в разрезы вставляют эндоскоп и хирургические режущие инструменты для вырезания, удаления, обработки или парализования ткани для уменьшения или устранения морщин со лба.
[0004] Еще менее инвазивное косметическое лечение предполагает ввод в брови нейротоксина. Эта процедура парализует мышцы внутри бровей, вследствие чего может быть достигнуто сокращение морщин. Однако такие процедуры являются временными, могут потребовать постоянного использования для поддержания необходимого результата и могут иметь вредные последствия.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Существует потребность в неинвазивных косметических процедурах для уменьшения количества морщин в области головы и шеи, например в области лба, и в других областях. Дополнительно существует потребность в неинвазивных косметических процедурах, которые обеспечивают натяжение кожи в области головы и шеи, включая область лба и другие области. Кроме того, существует потребность в эффективной и оперативной визуализации области кожи, предназначенной для обработки. В некоторых из вариантов реализации, описанных здесь, процедура является полностью косметической и не является медицинским актом.
[0006] Соответственно некоторые варианты реализации настоящего изобретения обеспечивают систему и способ для косметической обработки и визуализации. В различных вариантах реализации лечебная система содержит ручной зонд, который может быть приведен в действие по меньшей мере одним пальцем, средство управления и сменный преобразующий модуль, содержащий по меньшей мере один ультразвуковой преобразователь. В одном из вариантов реализации система содержит управляющий блок, который соединен с ручным зондом и имеет графический пользовательский интерфейс для управления сменным преобразующим модулем, который имеет интерфейсное соединение ручного зонда с управляющим блоком. В аспекте варианта реализации интерфейс обеспечивает подачу электропитания ручному зонду и/или передает сигнал от ручного зонда в управляющий блок. В различных вариантах реализации настоящего изобретения косметическая система обработки и визуализации используется в эстетических процедурах на части головы субъекта, включая лицо, лоб, шею и/или уши субъекта.
[0007] В соответствии с одним из вариантов реализации эстетической системы визуализации эстетическая система визуализации содержит ручной зонд, сменный преобразующий модуль, управляющий блок и интерфейсное соединение ручного зонда и управляющего блока. Ручной зонд содержит управляющее устройство, которое активируется по меньшей мере одним пальцем. Сменный преобразующий модуль содержит ультразвуковой преобразователь и, по меньшей мере, один интерфейс, выполненный с возможностью соединения с ручным зондом. Управляющий блок соединен с ручным зондом и содержит графический пользовательский интерфейс для управления сменным преобразующим модулем. В одном из вариантов реализации интерфейс соединяет ручной зонд с управляющим блоком и обеспечивает по меньшей мере подачу электропитания ручному зонду. В одном из вариантов реализации интерфейс передает по меньшей мере один сигнал между ручным зондом и управляющим блоком. В одном из вариантов реализации по меньшей мере один сигнал (например, 1, 2, 3, 4, 5 или больше сигналов) передается от зонда к управляющему блоку. В другом варианте реализации по меньшей мере один сигнал (например, 1, 2, 3, 4, 5 или больше сигналов) передается от управляющего блока к зонду. В некоторых вариантах реализации по меньшей мере один сигнал (например, 1, 2, 3, 4, 5 или больше сигналов) передается к зонду, от зонда или между зондом и управляющим блоком. В одном из вариантов реализации эстетическая система визуализации также содержит принтер, соединенный с управляющим блоком, и управляющий блок обеспечивает передачу выходного сигнала и питания к принтеру. В одном из вариантов реализации эстетическая система визуализации также содержит ключ, действующий для отпирания управляющего блока для управления сменным преобразующим модулем. В одном из вариантов реализации эстетической системы визуализации ручной зонд содержит перемещающий механизм, действующий для перемещения ультразвукового преобразователя внутри преобразующего модуля. В одном из вариантов реализации эстетическая система визуализации также содержит по меньшей мере один датчик, соединенный с ручным зондом и/или сменным преобразующим модулем.
[0008] В соответствии с одним из вариантов выполнения ручного зонда для использования в косметической обработке указанный зонд содержит первое управляющее устройство, оперативно управляющее функцией визуализации, второе управляющее устройство, оперативно управляющее функцией обработки, индикатор состояния, вход для питания, выход по меньшей мере для одного сигнала, перемещающий механизм и сменный преобразующий модуль, оперативно соединенный по меньшей мере с одним из первого управляющего устройства, второго управляющего устройства и перемещающего механизма. В одном из вариантов реализации ручной зонд содержит фиксирующее устройство для разъемного удерживания преобразующего модуля в зонде. В одном из вариантов реализации ручной зонд содержит кабель для передачи по меньшей мере одного из входа и выхода. В одном из вариантов реализации ручной зонд содержит управляющее устройство, оперативно взаимодействующее с кабелем, причем управляющее устройство имеет графический пользовательский интерфейс для управления сменным преобразующим модулем. В одном из вариантов реализации ручной зонд содержит первый преобразующий модуль, соединенный с первым управляющим устройством, и второй преобразующий модуль, соединенный со вторым управляющим устройством.
[0009] В соответствии с одним из вариантов реализации устройства для косметической визуализации и обработки указанное устройство содержит сменный преобразующий модуль и управляющее устройство. В одном из вариантов реализации преобразующий модуль не является сменным. В одном из вариантов реализации преобразующий модуль является встроенным или постоянно присоединенным. Сменный преобразующий модуль взаимодействует с ручным корпусом, имеющим по меньшей мере одну кнопку управляющего устройства, так что преобразующий модуль и кнопка могут быть задействованы с использованием одной руки. Преобразующий модуль обеспечивает ультразвуковую энергию по меньшей мере для одной из функций визуализации и функций обработки. Управляющее устройство соединено с ручным корпусом и взаимодействует с преобразующим модулем. Управляющее устройство управляет ультразвуковой энергией и принимает по меньшей мере один сигнал от преобразующего модуля. Управляющее устройство имеет источник питания, оперативно обеспечивающий питание по меньшей мере для генерации ультразвуковой энергии. В одном из вариантов реализации предложенное устройство также содержит графический пользовательский интерфейс для управления преобразующим модулем и для просмотра по меньшей мере одного сигнала от преобразующего модуля. В одном из вариантов реализации устройство имеет ручной корпус, который также содержит перемещающий механизм, оперативно перемещающий преобразователь в преобразующем модуле, причем перемещающим механизмом управляет управляющее устройство. В одном из вариантов реализации устройство имеет по меньшей мере одну кнопку управляющего устройства в качестве первой кнопки управляющего устройства, управляющей функцией визуализации, и вторую кнопку управляющего устройства, управляющую функцией обработки. В различных вариантах реализации устройство имеет функцию обработки, которая является одним из подтяжки кожи лица, натяжения кожи лба, подъема подбородка, разглаживания морщин, заживления шрамов, удаления татуировок, удаления вен, удаления пигментных пятен и удаления угрей. В другом варианте реализации устройство может использоваться на жировой ткани.
[0010] В соответствии с одним вариантом осуществления способа косметической обработки на лицевой (или другой) области субъекта, согласно предложенному способу вставляют преобразующий модуль в ручное управляющее устройство, вводят преобразующий модуль во взаимодействие с субъектом, активируют первый переключатель ручного управляющего устройства, оперативно инициирующего последовательность визуализации части ткани, пролегающей ниже кожного слоя, собирают данные от последовательности визуализации, вычисляют последовательность обработки на основе собранных данных и активируют второй переключатель ручного управляющего устройства, оперативно инициирующего последовательность обработки. В одном из вариантов реализации согласно предложенному способу дополнительно вызывают излучение первой ультразвуковой энергии из первого преобразователя, размещенного в преобразующем модуле, оперативно обеспечивающем источник для последовательности визуализации. В одном из вариантов реализации согласно предложенному способу дополнительно вызывают излучение второй ультразвуковой энергии из второго преобразователя, размещенного в преобразующем модуле, оперативно обеспечивающем источник для последовательности обработки. В одном из вариантов реализации согласно предложенному способу дополнительно осуществляют натяжение части кожных слоев, включая лицевую область субъекта. В одном из вариантов реализации согласно предложенному способу предусмотрен преобразующий модуль для обеспечения последовательности обработки на фиксированной глубине ниже кожного слоя.
[0011] В соответствии с одним из вариантов выполнения ручного зонда для использования в косметической обработке указанный зонд содержит первое управляющее устройство, оперативно управляющее функцией ультразвуковой визуализации, второе управляющее устройство, оперативно управляющее функцией обработки ультразвуком, перемещающий механизм, выполненный с возможностью перемещения через непроницаемое для жидкости уплотнение, и заполненный текучей средой преобразующий модуль. В одном из вариантов реализации заполненный текучей средой преобразующий модуль оперативно соединен по меньшей мере с одним из первого управляющего устройства, второго управляющего устройства и перемещающего механизма. В одном из вариантов реализации заполненный текучей средой преобразующий модуль может быть механически и электрически отделен по меньшей мере от одного из первого управляющего устройства, второго управляющего устройства и перемещающего механизма. В одном из вариантов реализации, заполненный текучей средой преобразующий модуль содержит акустическую жидкость. В одном из вариантов реализации, заполненный текучей средой преобразующий модуль содержит гель, составленный с возможностью улучшения передачи ультразвукового сигнала. В одном из вариантов реализации гель, составленный с возможностью улучшения передачи ультразвукового сигнала, размещен между преобразователем и кожей субъекта.
[0012] В соответствии с одним вариантом выполнения ручного зонда для использования в косметической обработке указанный зонд содержит первое управляющее устройство, оперативно управляющее функцией ультразвуковой визуализации, второе управляющее устройство, оперативно управляющее функцией обработки ультразвуком, и перемещающий механизм, выполненный с возможностью формирования линейной последовательности отдельных тепловых областей воздействия с использованием второго управляющего устройства. В одном из вариантов реализации перемещающий механизм выполнен с возможностью автоматизации и программирования пользователем. В одном из вариантов реализации зонд содержит преобразующий модуль, оперативно соединенный по меньшей мере с одним из первого управляющего устройства, второго управляющего устройства и перемещающего механизма. В одном из вариантов реализации линейная последовательность отдельных тепловых областей воздействия имеет шаг следования импульсов обработки в диапазоне от примерно 0,01 мм до примерно 25 мм. В одном из вариантов реализации перемещающий механизм выполнен с возможностью программирования для обеспечения изменяемого разделяющего расстояния между отдельными областями теплового воздействия. В одном из вариантов реализации отдельные области теплового воздействия являются дискретными. В одном из вариантов реализации отдельные области теплового воздействия перекрывают друг друга.
[0013] В соответствии с одним вариантом реализации ультразвуковой системы с изменяемыми ультразвуковыми параметрами для использования в косметической обработке указанная система содержит первое управляющее устройство, второе управляющее устройство, перемещающий механизм и по меньшей мере один сменный преобразующий модуль. В различных вариантах реализации по меньшей мере один сменный преобразующий модуль содержит по меньшей мере два сменных преобразующих модуля. В различных вариантах реализации различные количества сменных преобразующих модулей могут быть выполнены с возможностью использования для различных или изменяемых ультразвуковых параметров. Например, в различных неограничивающих вариантах реализации указанный ультразвуковой параметр может относиться к геометрии преобразователя, размеру, синхронизации, пространственной конфигурации, частотам, изменениям пространственных параметров, изменениям временных параметров, формированию коагуляции, глубине, ширине, коэффициенту поглощения, коэффициенту рефракции, глубине пролегания ткани и/или другим характеристикам ткани. В различных вариантах реализации изменяемый ультразвуковой параметр может быть изменен или модифицирован для управления формированием области воздействия для достижения желательного косметического эффекта. В различных вариантах реализации изменяемый ультразвуковой параметр может быть изменен или модифицирован для управления формированием области воздействия для достижения желательного клинического эффекта. Например, один изменяемый ультразвуковой параметр относится к аспектам конфигураций, связанных с глубиной пролегания ткани. Например, некоторые неограничивающие варианты выполнения сменных преобразующих модулей могут быть реализованы с возможностью использования на глубинах пролегания ткани 3 мм, 4,5 мм, 6 мм, меньше 3 мм, между 3 мм и 4,5 мм, больше 4,5 мм, больше 6 мм и примерно в диапазонах 0-3 мм, 0-4,5 мм, 0-25 мм, 0-100 мм, и любых других глубинах. В одном из вариантов реализации ультразвуковая система снабжена двумя модулями преобразователя, из которых первый модуль используют для обработки на глубине примерно 4,5 мм, и второй модуль используют для обработки на глубине примерно 3 мм. Также может быть использован дополнительный третий модуль для обработки на глубине примерно 1,5-2 мм. В частности предпочтительна комбинация по меньшей мере из двух модулей обработки, поскольку она обеспечивает возможность обработки субъекта на различных глубинах пролегания ткани и таким образом обеспечивает синергетический эффект и улучшенные клинические результаты одиночной процедуры обработки. Например, обработка на различных глубинах под одной поверхностной областью обеспечивает увеличенный общий объем обработки ткани, что приводит к улучшению формирования коллагена и натяжения. Кроме того, обработка на различных глубинах воздействует на ткани различных типов и таким образом обеспечивает достижение различных клинических эффектов, которые все вместе обеспечивают улучшенный общий косметический результат. Например, поверхностная обработка может уменьшить заметность морщин, а более глубокая обработка может индуцировать повышенный рост коллагена.
[0014] Хотя обработка тканей субъекта на различных глубинах в течение одной процедуры может быть предпочтительным в некоторых вариантах реализации, тем не менее в других вариантах реализации может быть полезным последовательная обработка в течение длительного времени. Например, на первой неделе могут быть обработаны ткани, пролегающие под той же самой поверхностной областью на одной глубине, на второй неделе могут быть обработаны ткани, пролегающие на второй глубине, и т.д. Новый коллаген, сформированный во время первой обработки, может быть более чувствителен к последующей обработке, которая может быть необходима для некоторых показаний. В другом варианте реализации изобретения может быть предпочтительным обработка на разных глубинах под одной и той же поверхностной областью в течение одиночной процедуры, поскольку обработка на одной глубине может синергетически улучшить или закрепить обработку, осуществленную на другой глубине (благодаря, например, улучшенному кровоснабжению, стимулирующим факторам роста, гормональной стимуляции и т.д.).
[0015] В некоторых вариантах реализации различные модули преобразователя обеспечивают обработку на различных глубинах. В некоторых вариантах реализации, в частности, предпочтительна система, содержащая различные преобразователи, каждый из которых предназначен для разных глубин, поскольку такая система уменьшает риск неосторожного выбора пользователем неправильной глубины. В одном из вариантов реализации одиночный преобразующий модуль может быть выполнен с возможностью регулировки или управления для различных глубин. Вместе с одноблочной системой для минимизации риска выбора неправильной глубины могут быть использованы отличительные особенности безопасности.
[0016] В некоторых вариантах реализации предложен способ обработки нижней части лица и области шеи (например, подбородочной области). В некоторых вариантах реализации предложен способ обработки (например, смягчения) подбородочных складок. В других вариантах реализации предложен способ обработки глазной области. В некоторых вариантах реализации устранение дряблости верхнего века и периорбитальных линий, а также улучшение текстуры ткани могут быть достигнуты обработкой на изменяемых глубинах. В одном из вариантов реализации обработка субъекта включает примерно 40-50 циклов на глубинах 4,5 мм и 3 мм. Кроме того, обработка субъекта может включать примерно 40-50 циклов на глубине примерно 1,5-2 мм. Обработка субъекта может включать примерно 40-50 циклов на глубине примерно 6 мм. Путем обработки на различных глубинах в течение одиночной процедуры обработки могут быть достигнуты оптимальные клинические эффекты (например, смягчение, натяжение).
[0017] В некоторых вариантах реализации предложенные способы обработки, описанные здесь, являются неинвазивными косметическими процедурами. В некоторых вариантах реализации предложенные способы могут быть использованы вместе с инвазивными процедурами, такими как хирургические реконструкции или липосакция, если необходимо обеспечить натяжение кожи.
[0018] В соответствии с одним из вариантов реализации системы с изменяемыми ультразвуковыми параметрами для использования в косметической обработке указанная система содержит первое управляющее устройство, второе управляющее устройство, перемещающий механизм, первый сменный преобразующий модуль и второй сменный преобразующий модуль. Первое управляющее устройство оперативно управляет функцией ультразвуковой визуализации. Второе управляющее устройство оперативно управляет функцией обработки ультразвуком. Перемещающий механизм выполнен с возможностью формирования линейной последовательности отдельных областей теплового воздействия с целью обработки. Первый сменный преобразующий модуль выполнен с возможностью обработки ткани, пролегающей на первой глубине. Второй сменный преобразующий модуль выполнен с возможностью обработки ткани, пролегающей на второй глубине. Первый и второй модули преобразователя соединены с ручным зондом с возможностью взаимозамены. Первый и второй модули преобразователя оперативно соединены по меньшей мере с одним из первого управляющего устройства, второго управляющего устройства и перемещающего механизма. Быстрая взаимозаменяемость и замена нескольких модулей в одном устройстве облегчают обработку в некоторых вариантах реализации. В одном из вариантов реализации отдельные области теплового воздействия являются дискретными. В одном из вариантов реализации отдельные области теплового воздействия перекрывают друг друга или объединяются, и т.д.
[0019] В соответствии с одним из вариантов реализации указанная система для эстетической визуализации и обработки содержит ручной зонд, сменный преобразующий модуль, управляющий блок и интерфейсное соединение ручного зонда с управляющим блоком. Ручной зонд содержит управляющее устройство, выполненное с возможностью управления по меньшей мере одним пальцем. Сменный преобразующий модуль содержит ультразвуковой преобразователь и по меньшей мере один интерфейс, выполненный с возможностью соединения с ручным зондом. Управляющий блок соединен с ручным зондом и содержит графический пользовательский интерфейс для управления сменным преобразующим модулем. Интерфейсное соединение ручного зонда с управляющим блоком передает по меньшей мере один сигнал между ручным зондом и управляющим блоком. В одном из вариантов реализации система дополнительно содержит принтер, соединенный с управляющим блоком, передающим выходной сигнал и питание принтеру. В одном из вариантов реализации система дополнительно содержит ключ, выполненный с возможностью отпирания управляющего блока для управления сменным преобразующим модулем. В одном из вариантов реализации ручной зонд дополнительно содержит перемещающий механизм, действующий для перемещения ультразвукового преобразователя внутри преобразующего модуля. В одном из вариантов реализации система дополнительно содержит по меньшей мере один датчик, соединенный с одним из ручного зонда и сменного преобразующего модуля.
[0020] В соответствии с одним из вариантов выполнения ручного зонда для использования в косметической обработке указанный зонд содержит первое управляющее устройство, оперативно управляющее функцией визуализации, второе управляющее устройство, оперативно управляющее функцией обработки, индикатор состояния, вход для энергии, выход по меньшей мере для одного сигнала, перемещающий механизм и сменный преобразующий модуль, оперативно соединенный по меньшей мере с одним из первого управляющего устройства, второго управляющего устройства и перемещающего механизма. В одном из вариантов реализации система дополнительно содержит фиксирующее устройство, удерживающее преобразующий модуль в зонде разъединяемым способом. В одном из вариантов реализации система дополнительно содержит кабель для передачи по меньшей мере одного из входного и выходного сигналов. В одном из вариантов реализации система дополнительно содержит управляющее устройство, оперативно взаимодействующее с кабелем, причем указанное управляющее устройство имеет графический пользовательский интерфейс для управления сменным преобразующим модулем. В одном из вариантов реализации преобразующий модуль содержит первый преобразователь, соединенный с первым управляющим устройством, и второй преобразователь, соединенный со вторым управляющим устройством.
[0021] В соответствии с одним вариантом реализации устройства для косметической обработки указанное устройство содержит сменный преобразующий модуль, взаимодействующий с ручным корпусом, и управляющее устройство, соединенное с ручным корпусом и взаимодействующее с преобразующим модулем. Сменный преобразующий модуль имеет по меньшей мере одну кнопку управляющего устройства, так что преобразующий модуль и кнопка могут быть задействованы с использованием одной руки. Преобразующий модуль обеспечивает ультразвуковую энергию для функции обработки. Управляющее устройство управляет ультразвуковой энергией и принимает по меньшей мере один сигнал от преобразующего модуля. Управляющее устройство имеет источник питания, оперативно обеспечивающий энергию по меньшей мере для ультразвукового излучения. В одном из вариантов реализации управляющее устройство дополнительно содержит графический пользовательский интерфейс для управления преобразующим модулем и для просмотра по меньшей мере одного сигнала от преобразователя. В одном из вариантов реализации ручной корпус также содержит перемещающий механизм, оперативно перемещающий преобразователь в преобразующем модуле, причем указанным перемещающим механизмом управляет управляющее устройство. В одном из вариантов реализации по меньшей мере одна кнопка управляющего устройства содержит первую кнопку управляющего устройства, управляющую функцией визуализации, и вторую кнопку управляющего устройства, управляющую функцией обработки. В одном из вариантов реализации функция обработки представляет собой по меньшей мере одно из подтяжки кожи лица, натяжения кожи лба, натяжения кожи в области подбородка, разглаживания морщин, заживления шрамов, удаления татуировок, удаления вен, удаления пигментных пятен и лечения угрей.
[0022] В соответствии с одним вариантом реализации способа косметической обработки лицевой области субъекта, согласно указанному способу вставляют преобразующий модуль в ручное управляющее устройство, вводят преобразующий модуль во взаимодействие с лицевой область субъекта, активируют первый переключатель на ручном управляющем устройстве, оперативно инициирующем последовательность визуализации части ткани, пролегающей ниже кожного слоя, собирают данные от последовательности визуализации, вычисляют последовательность обработки на основе собранных данных и активируют второй переключатель на ручном управляющем устройстве, оперативно инициирующем последовательность обработки. В одном из вариантов реализации согласно предложенному способу дополнительно вызывают излучение первой ультразвуковой энергии первым преобразователем, размещенным в преобразующем модуле, оперативно обеспечивающем источник для последовательности визуализации. В одном из вариантов реализации согласно предложенному способу дополнительно вызывают излучение второй ультразвуковой энергии вторым преобразователем, размещенным в преобразующем модуле, оперативно обеспечивающем источник для последовательности обработки. В одном из вариантов реализации согласно предложенному способу дополнительно осуществляют натяжение части кожных слоев, включая лицевую область субъекта. В одном из вариантов реализации преобразующий модуль обеспечивает выполнение последовательности обработки на фиксированной глубине ниже кожного слоя.
[0023] В некоторых вариантах реализации настоящее изобретение содержит ручной зонд для использования в косметической обработке. В одном из вариантов реализации зонд содержит первое управляющее устройство, оперативно управляющее функцией ультразвуковой визуализации для выполнения ультразвуковой визуализации, и второе управляющее устройство, оперативно управляющее функцией обработки ультразвуком для выполнения обработки ультразвуком. Управляющие устройства в некоторых вариантах реализации являются кнопками, которыми манипулируют указательным/большим пальцем, или ключами, которые связываются с компьютерным процессором. Зонд также содержит перемещающий механизм, выполненный с возможностью направления обработки ультразвуком в линейной последовательности отдельных областей теплового воздействия. В одном из вариантов реализации линейная последовательность отдельных областей теплового воздействия имеет шаг следования импульсов обработки в диапазоне от примерно 0,01 мм до примерно 25 мм. В одном из вариантов реализации отдельные области теплового воздействия являются дискретными. В одном из вариантов реализации отдельные области теплового воздействия перекрывают друг друга. Перемещающий механизм выполнен с возможностью его программирования для обеспечения изменяемого разделяющего расстояния между отдельными областями теплового воздействия. Дополнительно обеспечены первый и второй сменные модули преобразователя. Каждый из первого и второго преобразующего модуля выполнен с возможностью осуществления как ультразвуковой визуализации, так и обработки ультразвуком. Первый и второй модули преобразователя выполнены с возможностью взаимозаменяемого соединения с ручным зондом. Первый преобразующий модуль выполнен с возможностью применения ультразвуковой терапии к первому слою ткани, в то время как второй преобразующий модуль выполнен с возможностью применения ультразвуковой терапии к второму слою ткани. Второй слой ткани пролегает на глубине, отличающейся от глубины пролегания первого слоя ткани. Первый и второй модули преобразователя выполнены с возможностью оперативного соединения по меньшей мере с одним из первого управляющего устройства, второго управляющего устройства и перемещающего механизма.
[0024] В одном из вариантов реализации может быть использован третий преобразующий модуль. Третий преобразующий модуль выполнен с возможностью применения ультразвуковой терапии к третьему слою ткани, причем третий слой ткани пролегает на глубине, отличающейся от глубин пролегания первого или второго слоев ткани. В дополнительных вариантах реализации используются четвертый и пятый модули. Модули преобразователя выполнены с возможностью обработки на изменяемой глубине, и перемещающий механизм выполнен с возможностью изменяемого обработки вдоль одиночного уровня глубины.
[0025] В одном из вариантов реализации по меньшей мере одно из первого управляющего устройства и второго управляющего устройства активируется средством управления. Управляющий блок содержит процессор и графический пользовательский интерфейс для управления первым и вторым модулями преобразователя.
[0026] В некоторых вариантах реализации предложен способ выполнения косметической процедуры на субъекте с использованием ручного зонда, описанного здесь. В одном из вариантов реализации согласно предложенному способу выполняют ультразвуковую визуализацию первой целевой области у субъекта с использованием первого преобразующего модуля и ультразвуковую обработку первой целевой области у субъекта с использованием первого преобразующего модуля на первой глубине пролегания ткани. Обработка содержит многократные циклы обработки в первой целевой области, которые автоматически выбраны (например, запрограммированы, заданы и т.д.) перемещающим механизмом. В одном из вариантов реализации согласно предложенному способу дополнительно заменяют первый преобразующий модуль вторым преобразующим модулем, выполняют ультразвуковую визуализацию второй целевой области у субъекта с использованием второго преобразующего модуля и выполняют обработку ультразвуком второй целевой области у субъекта с использованием второго преобразующего модуля на второй глубине пролегания ткани. Обработка содержит ряд циклов обработки во второй целевой области, которые автоматически выбраны (например, запрограммированы, заданы и т.д.) перемещающим механизмом. В одном из вариантов реализации первая и вторая целевые области расположены под одной и той же поверхностью субъекта.
[0027] В нескольких вариантах реализации настоящее изобретение содержит ручной зонд для использования в косметической обработке. В соответствии с одним из вариантов реализации ручной зонд содержит первое управляющее устройство, второе управляющее устройство, перемещающий механизм и преобразующий модуль. Первое управляющее устройство оперативно управляет функцией ультразвуковой визуализации для обеспечения ультразвуковой визуализации. Второе управляющее устройство оперативно управляет функцией обработки ультразвуком для обеспечения обработкой ультразвуком. Перемещающий механизм выполнен с возможностью направления обработки ультразвуком в последовательность отдельных областей теплового воздействия. Сменный преобразующий модуль выполнен с возможностью выполнения как ультразвуковой визуализации, так и обработки ультразвуком. Сменный преобразующий модуль выполнен с возможностью взаимозаменяемого соединения с ручным зондом. Сменный преобразующий модуль выполнен с возможностью оперативного соединения по меньшей мере с одним из указанного первого управляющего устройства, указанного второго управляющего устройства и указанного перемещающего механизма. Сменный преобразующий модуль выполнен с возможностью применения к ткани ультразвуковой терапии по меньшей мере с первым изменяемым ультразвуковым параметром.
[0028] В одном из вариантов реализации ручной зонд выполнен с возможностью применения к ткани ультразвуковой терапии со вторым изменяемым ультразвуковым параметром. В одном из вариантов реализации сменный преобразующий модуль выполнен с возможностью применения к ткани ультразвуковой терапии со вторым изменяемым ультразвуковым параметром. В одном из вариантов реализации ручной зонд дополнительно содержит второй сменный преобразующий модуль, причем второй сменный преобразующий модуль выполнен с возможностью применения к ткани ультразвуковой терапии со вторым изменяемым ультразвуковым параметром. В одном из вариантов реализации изменяемым ультразвуковым параметром является глубина ткани. В одном из вариантов реализации изменяемым ультразвуковым параметром является частота. В одном из вариантов реализации изменяемым ультразвуковым параметром является синхронизация. В одном из вариантов реализации изменяемым ультразвуковым параметром является геометрия.
[0029] В некоторых вариантах реализации настоящее изобретение содержит ручной зонд для использования в косметической обработке. В одном из вариантов реализации зонд содержит по меньшей мере одно управляющее устройство, перемещающий механизм и преобразующий модуль. В одном из вариантов реализации зонд содержит по меньшей мере одно управляющее устройство, оперативно управляющее функцией ультразвуковой визуализации для обеспечения ультразвуковой визуализации и оперативно управляющее функцией обработки ультразвуком для обеспечения обработки ультразвуком. Могут быть использованы по меньшей мере одно управляющее устройство. Используется перемещающий механизм, выполненный с возможностью направления обработки ультразвуком в последовательность отдельных областей теплового воздействия. Преобразующий модуль выполнен с возможностью выполнения как ультразвуковой визуализации, так и обработки ультразвуком, и оперативно соединен по меньшей мере с одним управляющим устройством и перемещающим механизмом. Преобразующий модуль выполнен с возможностью применения ультразвуковой терапии с первым ультразвуковым параметром и вторым ультразвуковым параметром. В различных вариантах реализации первый и второй ультразвуковые параметры выбраны из группы параметров, таких как: изменяемая глубина, переменная частота и изменяемая геометрия. Например, в одном из вариантов реализации одиночный преобразующий модуль осуществляет ультразвуковую терапию по меньшей мере на двух глубинах. В другом варианте реализации каждый по меньшей мере из двух взаимозаменяемых преобразующих модулей обрабатывает на различной глубине (например, один модуль обрабатывает на глубине 3 мм, в то время как другой модуль обрабатывает на глубине 4,5 мм). Еще в одном варианте реализации одиночный преобразующий модуль обеспечивает ультразвуковую терапию по меньшей мере на двух частотах, конфигурациях, амплитудах, скоростях, типах волн и/или длинах волн. В других вариантах реализации каждый по меньшей мере из двух взаимозаменяемых преобразующих модулей обеспечивает различные значения параметра. В одном из вариантов реализации одиночный преобразователь может обеспечивать обработку по меньшей мере на двух различных глубинах и по меньшей мере на двух различных частотах (или других параметрах). В частности, в некоторых вариантах реализации предпочтительны изменяемые варианты параметров, поскольку они предлагают улучшенное управление обработкой ткани и оптимизируют формирование области воздействия, коагуляцию ткани, объем обработки и т.д.
[0030] Другие области применения станут очевидными из приведенного здесь описания. Разумеется, описание и заданные примеры предназначены лишь для целей иллюстрации и не предназначены для ограничения объема раскрытых здесь вариантов реализации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0031] Чертежи, описанные здесь, предназначены лишь для целей иллюстрации и не предназначены для ограничения объема настоящего изобретения в любом случае. Варианты реализации настоящего изобретения станут более понятыми из подробного описания и сопроводительных чертежей, на которых:
[0032] На фиг.1 показана косметическая лечебная система согласно различным вариантам реализации настоящего изобретения;
[0033] На фиг.2 показан вид сверху ручного зонда согласно различным вариантам реализации настоящего изобретения;
[0034] На фиг.3 показан вид сбоку ручного зонда согласно различным вариантам реализации настоящего изобретения;
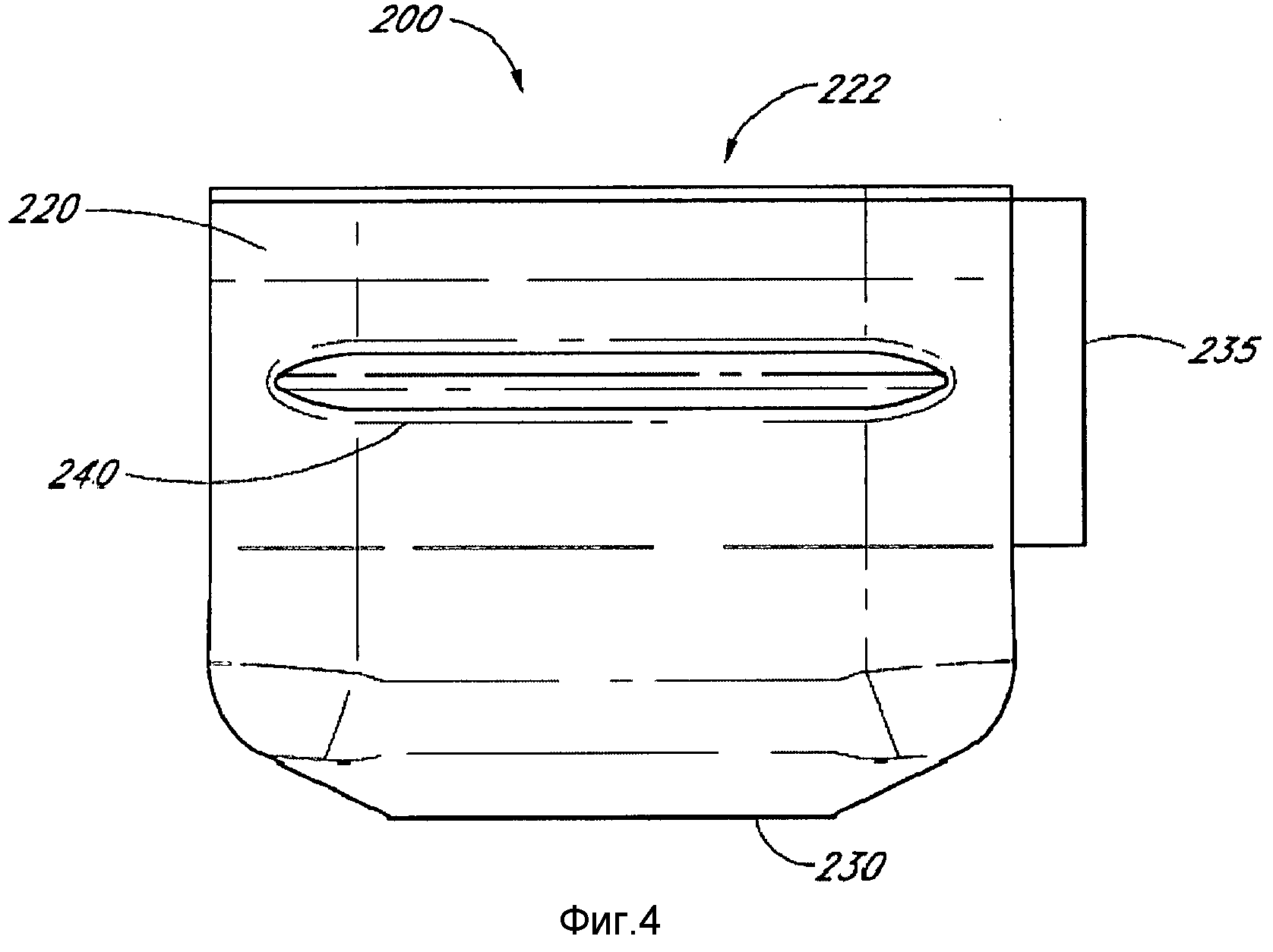
[0035] На фиг.4 показан вид сбоку приемопередающего модуля согласно различным вариантам реализации настоящего изобретения;
[0036] На фиг.5 показан другой вид сбоку приемопередающего модуля согласно различным вариантам реализации настоящего изобретения;
[0037] На фиг.6 показана структурная схема приемопередающего модуля согласно различным вариантам реализации настоящего изобретения;
[0038] На фиг.7 показан перемещающий механизм согласно различным вариантам реализации настоящего изобретения;
[0039] На фиг.8 показана структурная схема косметической лечебной системы согласно различным вариантам реализации настоящего изобретения;
[0040] На фиг.9 показана электрическая структурная схема косметической лечебной системы согласно различным вариантам реализации настоящего изобретения;
[0041] На фиг.10 схематически показаны ручной зонд и приемопередающий модуль согласно различным вариантам реализации настоящего изобретения;
[0042] На фиг.11 показана одна из возможных интересующих областей у субъекта согласно различным вариантам реализации настоящего изобретения;
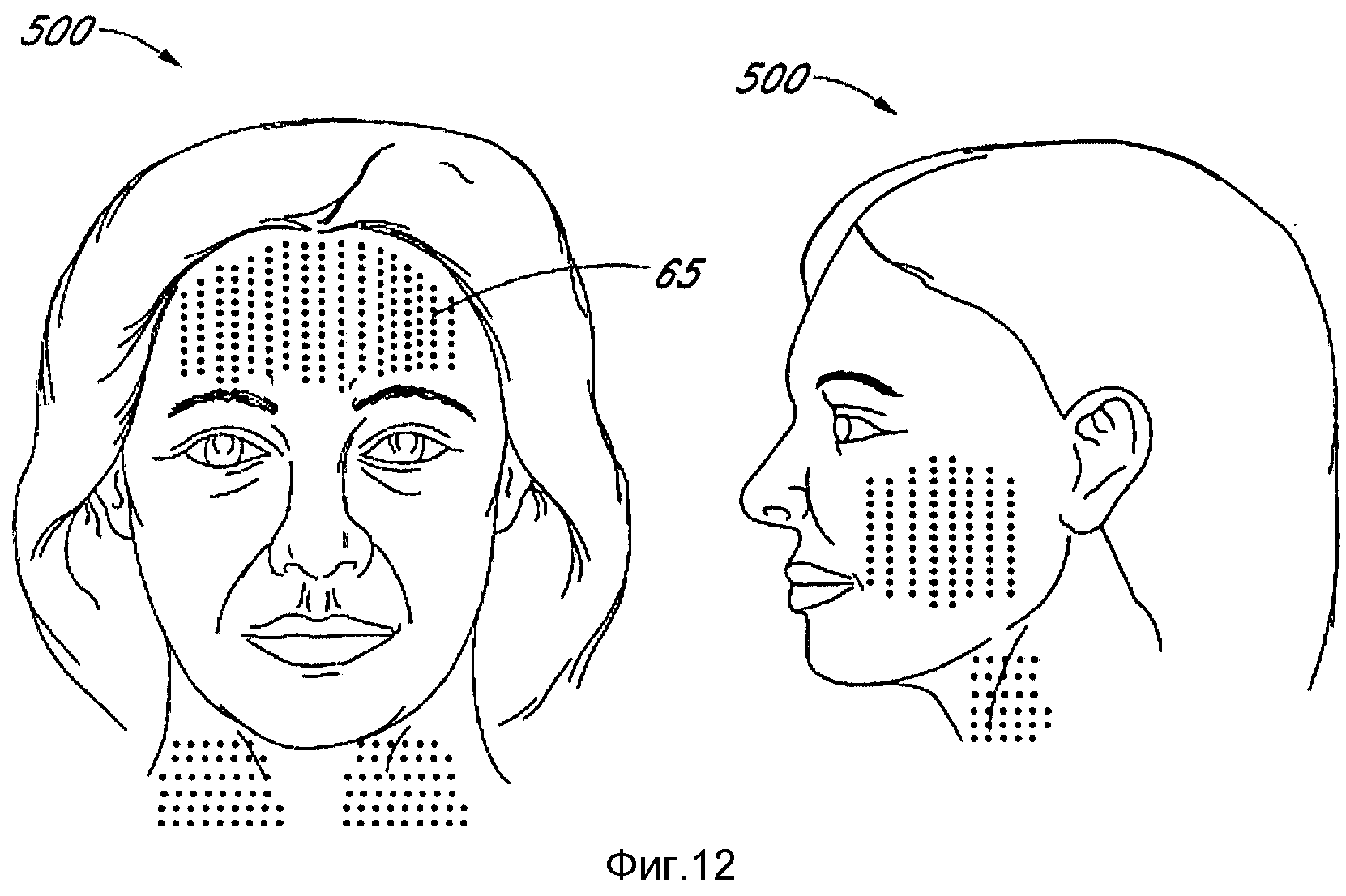
[0043] На фиг.12 показана одна из возможных интересующих областей у субъекта согласно различным вариантам реализации настоящего изобретения;
[0044] На фиг.13 показана интересующая область у субъекта согласно различным вариантам реализации настоящего изобретения;
[0045] На фиг.14 показано поперечное сечение части интересующей области согласно различным вариантам реализации настоящего изобретения;
[0046] На фиг.15 показано поперечное сечение устройства и способ согласно одному из вариантов реализации настоящего изобретения;
[0047] На фиг.16 показано поперечное сечение области обработки согласно различным вариантам реализации настоящего изобретения;
[0048] На фиг.17 показана косметическая лечебная система, взаимодействующая с интересующей областью согласно различным вариантам реализации настоящего изобретения;
[0049] На фиг.18 показана блок-схема способа согласно различным вариантам реализации настоящего изобретения;
[0050] На фиг.19 показана блок-схема другого способа согласно различным вариантам реализации настоящего изобретения;
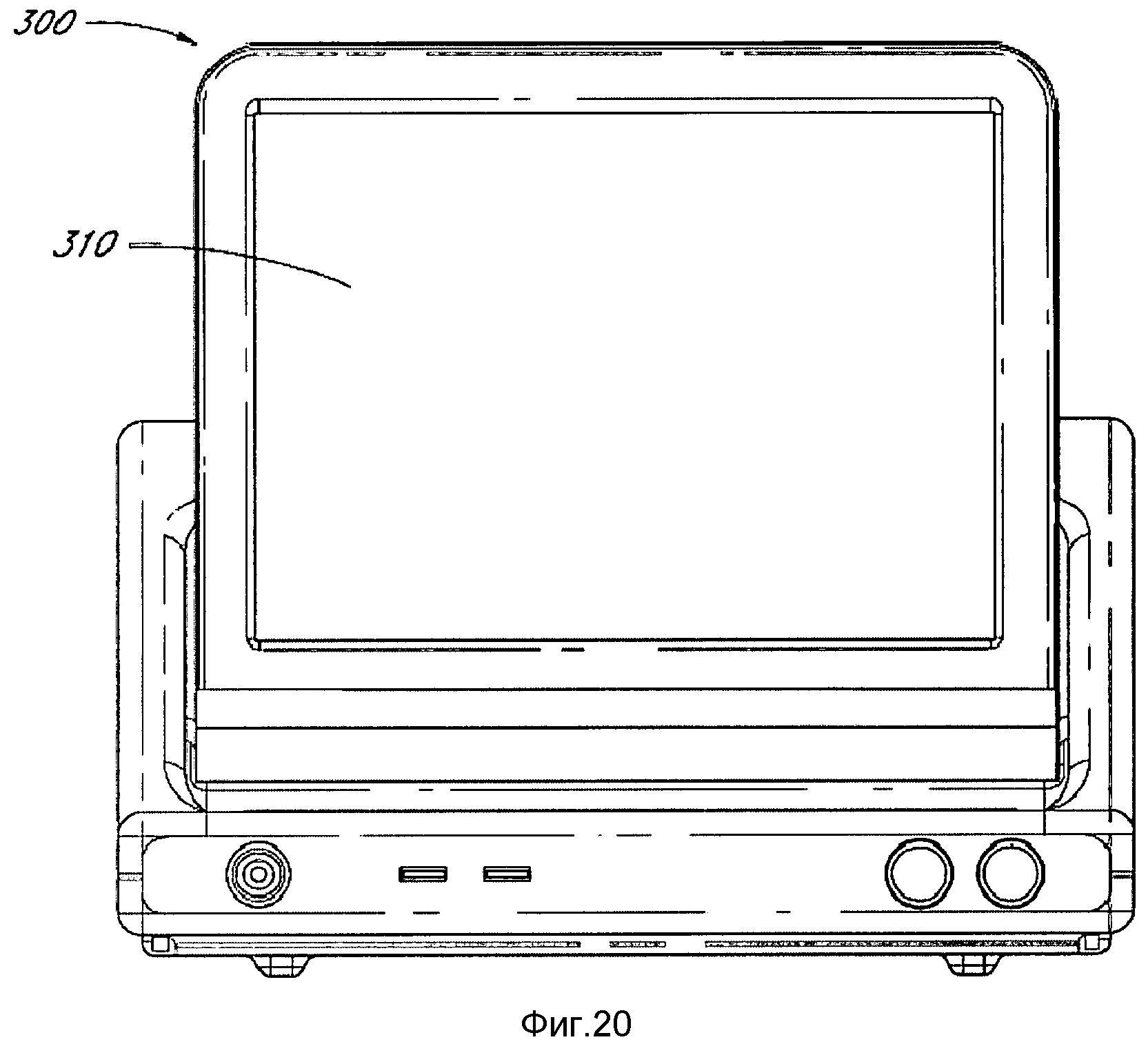
[0051] На фиг.20 показан вид спереди управляющего устройства согласно различным вариантам реализации настоящего изобретения;
[0052] На фиг.21 показан вид сбоку управляющего устройства согласно различным вариантам реализации настоящего изобретения;
[0053] На фиг.22 показан экран интерактивного графического дисплея на управляющем устройстве согласно одному из вариантов реализации настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0054] В следующем далее описании приведены примеры вариантов реализации, которые не ограничивают настоящее изобретение или его описание, применение или использование. Разумеется, во всех чертежах соответствующие позиционные номера указывают на соответствующие или подобные части и отличительные особенности. Описание заданных примеров, обозначенных в различных вариантах реализации настоящего изобретения, приведено исключительно в целях иллюстрации и не предназначено для ограничения объема настоящего изобретения, раскрытого здесь. Кроме того, описанные здесь варианты реализации, имеющие конкретные отличительные особенности, не исключают другие варианты реализации, имеющие дополнительные отличительные особенности, или другие варианты реализации, включающие различные комбинации конкретных отличительных особенностей. Далее, отличительные особенности в одном варианте выполнения (например, показанные на одном чертеже) могут быть скомбинированы с описанными (показанными на других чертежах) другими вариантами реализации.
[0055] В соответствии с вариантом реализации настоящего изобретения предложены способы и системы для обработки тканей ультразвуком, обеспечивающие косметическое лечение. В различных вариантах реализации настоящего изобретения подкожные и кожные ткани, например эпидерме, дерме, фасции и поверхностной мышечно-апоневротической системе лица (SMAS), лечатся неинвазивным способом с использованием энергии ультразвука. Энергия ультразвука может быть сфокусированной и несфокусированной и может быть приложена к интересующей области, включающей по меньшей мере одно из эпидермы, дермы, гиподермы, фасции и SMAS, для достижения терапевтического эффекта. В одном варианте реализации настоящее изобретение обеспечивает бесконтактное дерматологическое лечение для осуществления разглаживания кожи лба путем коагуляции и подтяжки ткани. В одном варианте реализации настоящее изобретение обеспечивает визуализацию кожи и подкожной ткани. Энергия ультразвука может быть сфокусированной или несфокусированной и может быть приложена к любой заданной интересующей области, включая жировую ткань. В одном из вариантов реализации жировая ткань является основной целью.
[0056] В различных вариантах реализации настоящего изобретения некоторые косметические процедуры, которые традиционно выполняют инвазивным способом, достигаются воздействием энергии, такой как энергия ультразвука, на заданные подкожные ткани. В нескольких вариантах реализации предложены способы и системы для неинвазивной обработки подкожных тканей для разглаживания кожи лба; однако предложенная косметическая лечебная система может быть использована и для других различных косметических лечебных применений, таких как подтяжка лица, лечение угрей и/или любое другое косметическое лечение. В одном варианте реализации предложенная система включает средство ультразвуковой визуализации с высоким разрешением, снабженное средством ультразвуковой терапии, обладающее отличительной особенностью визуализации, предоставляющей возможность пользователю перед обработкой визуализировать кожу и интересующие подкожные области. В одном варианте реализации система обеспечивает возможность размещения пользователем преобразующего модуля в оптимальном положении на поверхности кожи и предоставляет информацию обратной связи, контролируя надлежащий контакт с кожей. В одном варианте реализации терапевтическая система содержит модуль ультразвукового преобразователя, который направляет акустические волны в область обработки. Эта акустическая энергия нагревает ткань в результате потерь на трение во время поглощения энергии, формируя обособленную область коагуляции.
[0057] В различных вариантах реализации устройство содержит сменный преобразующий модуль, встроенный в ручной корпус, имеющий по меньшей мере одну управляющую кнопку, так что преобразующий модуль и управляющая кнопка могут быть задействованы с использованием лишь одной руки. В аспекте вариантов реализации преобразующий модуль обеспечивает ультразвуковую энергию для функции визуализации и/или функции обработки. В другом аспекте вариантов реализации устройство содержит управляющее устройство, встроенное в переносной корпус и соединенное с преобразующим модулем. Еще в одном аспекте вариантов реализации управляющее устройство управляет ультразвуковой энергией и принимает сигнал от преобразующего модуля. Управляющее устройство может иметь источник питания и схемы формирования сигнала, обеспечивающие подачу ультразвуковой энергии. Еще в одном аспекте вариантов реализации устройство используется в косметической визуализации и обработке субъекта или просто в обработке субъекта, например кожи лица субъекта.
[0058] Согласно одному из вариантов реализации способа разглаживания кожи лба у субъекта вводят зонд во взаимодействие с областью лба и визуализируют по меньшей мере часть подкожной ткани области лба для определения целевой области в подкожной ткани. В одном из вариантов реализации способа направляют ультразвуковую энергию в целевую область в подкожной ткани для разглаживания или коагуляции подкожной ткани в целевой области, что вызывает натяжение кожного слоя выше или ниже подкожной ткани в области лба.
[0059] Кроме того, некоторые варианты реализации настоящего изобретения обеспечивают способ натяжения части кожных слоев в лицевой области субъекта. В различных вариантах реализации согласно предложенному способу вставляют преобразующий модуль в ручное управляющее устройство и затем вводят преобразующий модуль во взаимодействие с лицевой областью субъекта. В одном варианте реализации согласно предложенному способу активируют рукой первый переключатель для инициации последовательности визуализации части ткани, расположенной ниже кожного слоя, затем собирают данные, полученные в результате последовательности визуализации. В этих вариантах реализации согласно предложенному способу вычисляют последовательности обработки на основе собранных данных и затем активируют рукой второй переключатель для инициации последовательности обработки. В одном из вариантов реализации предложенный способ может быть использован в области лица, головы, шеи и/или других частях тела субъекта.
[0060] В некоторых вариантах реализации система содержит ручной зонд с управляющим устройством, выполненным с возможностью управления по меньшей мере одним пальцем, и сменный преобразующий модуль, содержащий ультразвуковой преобразователь. В одном из вариантов реализации система содержит управляющий блок, который соединен с ручным зондом и имеет графический пользовательский интерфейс для управления сменным преобразующим модулем с использованием указанного интерфейса, связывающего ручной зонд с управляющим блоком. В одном из вариантов реализации интерфейс передает энергию ручному зонду. В одном из вариантов реализации интерфейс передает по меньшей мере один сигнал между ручным зондом и управляющим блоком. В одном из вариантов реализации эстетическая система визуализации используется в косметических процедурах, которые выполняют в области лица, головы, шеи и/или другой части тела субъекта.
[0061] Дополнительно, согласно некоторым вариантам реализации настоящего изобретения предложен ручной зонд для использования в эстетической обработке. В некоторых вариантах реализации указанный ручной зонд содержит первое управляющее устройство, оперативно управляющее функцией визуализации, второе управляющее устройство, оперативно управляющее функцией обработки, индикатор состояния, вход для энергии, выход по меньшей мере для одного сигнала и перемещающий механизм. Сменный преобразующий модуль может быть соединен с ручным зондом. Сменный преобразующий модуль может взаимодействовать с первым устройством управления, вторым устройством управления и/или перемещающим механизмом. В одном из вариантов реализации ручной зонд используется в косметических процедурах, которые выполняют на лице, голове, шее и/или других частях тела субъекта.
[0062] Некоторые варианты реализации настоящего изобретения могут быть описаны здесь с учетом использования различных компонентов и этапов обработки. Следует отметить, что такие компоненты и этапы могут быть реализованы с использованием любого количества аппаратных компонентов, выполненных с возможностью выполнения указанных функций. Например, в некоторых вариантах реализации настоящего изобретения могут быть использованы различные устройства для обработки, устройства для визуализации и отображения, входные устройства и т.п., которые могут выполнять различные функции под управлением по меньшей мере одной управляющей системы или других управляющих устройств. Некоторые варианты реализации настоящего изобретения могут быть использованы в любом количестве медицинских контекстов. Например, описанные здесь принципы, отличительные особенности и способы могут быть использованы в любых врачебных применениях.
[0063] Для более подробного объяснения различных аспектов вариантов реализации настоящего изобретения далее будут описаны несколько примеров косметической лечебной системы, которые могут использоваться с управляющей системой и системой ультразвукового зонда. Однако следует отметить, что следующие варианты реализации приведены здесь в иллюстративных целях, и варианты реализации настоящего изобретения могут содержать различные другие конфигурации для косметической обработки. Кроме того, косметическая лечебная система может дополнительно содержать компоненты, которые хотя и не показаны на чертежах, но тем не менее входят в состав систем визуализации, диагностики и/или лечебных систем, такие как любые необходимые источники энергии, электронная управляющая система, электронные подключения и/или дополнительные слоты для памяти.
[0064] На фиг.1 показан вариант реализации настоящего изобретения в форме косметической лечебной системы 20. В различных вариантах реализации настоящего изобретения косметическая лечебная система 20 (далее - CTS 20) содержит ручной зонд 100, приемопередающий модуль 200 и управляющее устройство 300. Ручной зонд 100 может быть соединен с управляющим устройством 300 посредством средства сопряжения 130. В одном из вариантов реализации интерфейс представлен электрическим кабелем. В одном из вариантов реализации кабель представляет собой двунаправленный интерфейс между ручным зондом 100 и управляющим устройством 300. В различных вариантах реализации средство сопряжения 130 может быть, например, любым многожильным кабельным или беспроводным интерфейсом. В одном из вариантов реализации средство сопряжения соединено с ручным зондом 100 гибким соединением 145. В одном из вариантов реализации гибкое соединение 145 выполнено с возможностью упругой деформации. Отдаленный конец средства сопряжения 130 соединен с соединителем управляющего устройства на гибкой схеме 345. В различных вариантах реализации гибкий соединитель 145 может быть жестким или может быть гибким, например содержать устройство, такое как упругая втулка, пружина, быстроразъемное соединение, армированный провод, их комбинации и т.п. В одном из вариантов реализации гибкое соединение 145 и соединение с управляющим устройством на гибкой схеме 345 могут содержать антенну и приемник для беспроводной связи между ручным зондом 100 и управляющим устройством 300. В одном из вариантов реализации средство сопряжения 130 может передавать управляемым способом энергию от управляющего устройства 300 ручному зонду 100.
[0065] В различных вариантах реализации управляющее устройство 300 может быть выполнено с возможностью взаимодействия с ручным зондом 100 и приемопередающим модулем 200, а также со всеми функциональными средствами CTS 20. В различных вариантах реализации несколько управляющих устройств 300, 300', 300'' и т.д. могут быть выполнены с возможностью взаимодействия с несколькими ручными зондами 100, 100', 100'' и т.д. или с несколькими приемопередающими модулями 200, 200', 200'' и т.д. В различных вариантах реализации второй вариант реализации ссылки может быть указан с использованием ссылочного номера по меньшей мере с одним штрихом ('). Например, в одном из вариантов реализации первый модуль 200 может быть использован вместе с вторым модулем 200', третьим модулем 200", четвертым модулем 200''', или в качестве дополнения к ним, и т.д. Схожим образом в различных вариантах реализации любая часть, выполненная в нескольких вариантах, может иметь ссылочный номер по меньшей мере с одним штрихом, присоединенным к ссылочному номеру для указания этого варианта реализации. Например, в одном варианте реализации первый преобразователь 280 может быть обозначен ссылочным номером 280, а для обозначения второго преобразователя 280' может быть использован штрих. В одном из вариантов реализации управляющее устройство 300 содержит интерактивный графический дисплей 310, который может содержать монитор с сенсорным экраном и графический пользовательский интерфейс (GUI), обеспечивающий возможность взаимодействия пользователя с CTS 20. В различных вариантах реализации этот дисплей 310 задает и отображает эксплуатационные режимы, включая статус работы оборудования, параметры обработки, системные сообщения и подсказки и ультразвуковые изображения. В различных вариантах реализации управляющее устройство 300 может быть выполнено с возможностью использования, например, микропроцессора с программным обеспечением и устройств ввода-вывода, систем и устройств для управления электронным и/или механическим сканированием и/или мультиплексированием преобразователей и/или мультиплексированием преобразующих модулей, систем для подачи энергии, систем для отслеживания, систем для измерения пространственного положения зонда и/или преобразователей и/или мультиплексирования преобразующих модулей, и/или систем для обработки пользовательских входных данных и выполнения записи результатов обработки, помимо прочего. В различных вариантах реализации управляющее устройство 300 может содержать системный процессор и различные цифровые логические управляющие устройства, такие как по меньшей мере один микроконтроллер, микропроцессор, программируемая логическая матрица, одноплатная вычислительная машина, и связанные с ними компоненты, включая аппаратное и управляющее программное обеспечение, которое может быть выполнено с возможностью связи посредством интерфейса с пользовательскими средствами управления и интерфейсными схемами, а также схемы ввода-вывода и системы для связи, отображения, интерфейсного соединения, хранения, документирования и других необходимых функций. Системное программное обеспечение может быть выполнено с возможностью управления инициализацией, синхронизацией, установкой уровня, мониторингом, контролем безопасности и всех других системных функций, необходимых для достижения заданных пользователем задач обработки. Кроме того, управляющее устройство 300 может содержать различные управляющие переключатели, которые также могут быть соответственно выполнены с возможностью управления работой CTS 20. В одном из вариантов реализации, управляющее устройство 300 содержит интерактивный графический дисплей 310 для передачи информации пользователю. В одном из вариантов реализации управляющее устройство 300 содержит по меньшей мере один порт 390 данных. В одном из вариантов реализации указанный порт 390 данных представляет собой порт USB, который может быть расположен в передней, боковой и/или задней частях управляющего устройства 300, обеспечивая возможность подключения запоминающего устройства, принтера 391, других устройств, или использования в других целях. В различных вариантах реализации CTS 20 содержит средство защиты 395, и в одном варианте реализации указанное средство защиты 395 может быть соединено с управляющим устройством 300 через порт USB. В одном из вариантов реализации для обеспечения возможности использования CTS 20 средство защиты 395 должно быть разблокировано, так чтобы переключатель 393 питания мог быть активирован. В другом варианте реализации для обеспечения возможности работы интерактивного графического дисплея 310 средство защиты 395 разблокируется вставкой аппаратного ключа доступа USB в комбинации с соответствующим программным обеспечением. В одном из вариантов реализации для возможности экстренного отключения используется кнопка 392 аварийного отключения, которая легкодоступна.
[0066] В различных вариантах реализации эстетическая система визуализации или CTS 20 содержит ручной зонд 100 с органом управления (150 и/или 160), выполненным с возможностью управления, по меньшей мере, одним пальцем, и сменный приемопередающий модуль 200, содержащий ультразвуковой преобразователь. Другие варианты реализации могут содержать несменные приемопередающие модули, приемопередающие модули, предназначенные лишь для визуализации, приемопередающие модули, предназначенные лишь для обработки, и приемопередающие модули, предназначенные как для визуализации, так и для обработки. В одном из вариантов реализации CTS 20 содержит управляющее устройство 300, которое соединено с ручным зондом 100 и имеет графический пользовательский интерфейс 310 для управления сменным преобразующим модулем 200 посредством средства сопряжения 130, такого как использованный в одном варианте реализации соединительный кабель, соединяющий ручной зонд 100 с управляющим устройством 300. В одном из вариантов реализации средство сопряжения 130 обеспечивает подачу электропитания ручному зонду 100. В одном из вариантов реализации средство сопряжения 130 передает по меньшей мере один сигнал между ручным зондом 100 и управляющим устройством 300. В аспекте этого варианта реализации эстетическая система визуализации CTS 20 используется в эстетических процедурах на части головы субъекта. В одном из вариантов реализации CTS 20 используется в эстетических процедурах на части лица, головы, шеи и/или других частях тела субъекта.
[0067] Дополнительно, некоторые варианты реализации настоящего изобретения содержат ручной зонд 100 для использования в эстетической обработке. В некоторых вариантах реализации ручной зонд 100 содержит первый орган управления 150, для управления функцией визуализации, второй орган управления 160, для управления функцией обработки, индикатор 155 состояния, вход для подачи электропитания, выход по меньшей мере для одного сигнала (например, к управляющему устройству 300), перемещающий механизм 400 и сменный преобразующий модуль 200, связанный с первым органом управления 150, вторым органом управления 160 и/или перемещающим механизмом 400. В аспекте вариантов реализации ручной зонд 100 используется в косметических процедурах на лице, голове, шее и/или других частях тела субъекта.
[0068] В соответствии с различными вариантами реализации настоящего изобретения приемопередающий модуль 200 может быть соединен с ручным зондом 100. В некоторых вариантах реализации приемопередающий модуль 200 может излучать и принимать энергию, такую как ультразвуковая энергия. В одном из вариантов реализации приемопередающий модуль 200 может быть выполнен лишь с возможностью излучения энергии, такой как ультразвуковая энергия. В одном из вариантов реализации приемопередающий модуль 200 постоянно соединен с ручным зондом 100. В одном из вариантов реализации приемопередающий модуль 200 выполнен с возможностью соединения с ручным зондом 100 и отсоединения от него. Приемопередающий модуль 200 может быть механически соединен с ручным зондом 100 посредством соединяющего фиксатора 140. Соединительная направляющая 235 может быть выполнена с возможностью облегчения соединения приемопередающего модуля 200 с ручным зондом 100. Кроме того, приемопередающий модуль 200 может быть электрически соединен с ручным зондом 100, и такое соединение может содержать интерфейс, который связан с управляющим устройством 300. В одном из вариантов реализации электрический соединитель в соединительной направляющей 235, расположенный в ближайшем конце приемопередающего модуля 200, предусматривает электрическую связь между приемопередающим модулем 200 и ручным зондом 100, который также может быть электрически связан с управляющим устройством 300. Приемопередающий модуль 200 может содержать различные конфигурации зонда и/или преобразователя. Например, приемопередающий модуль 200 может быть выполнен с возможностью комбинированного двойного режима визуализации/терапии преобразователя, совместного соединения или размещения преобразователей для визуализации/терапии или просто отдельного зонда для терапии и отдельного зонда для визуализации. В одном из вариантов реализации ручной зонд 100 содержит ручку с интегрированным гнездом для вставки приемопередающего модуля 200, содержащего по меньшей мере преобразователь на одном конце и электрический кабель для соединения с управляющим устройством 300 на другом конце.
[0069] Как показано на фиг.2 и 3, ручной зонд 100 может быть выполнен с учетом эргономического подхода для повышения комфорта, функциональности и/или облегчения использования ручного зонда 100 пользователем, таким как, например, практикующий врач или медицинский работник. Ручной зонд 100 может быть сконструирован для удобного использования обеими руками. В одном из вариантов реализации использование ручного зонда 100 не затруднено как для правой, так и для левой руки. В одном из вариантов реализации ручной зонд 100 содержит кнопку 150 визуализации, кнопку 160 обработки и индикатор 155, расположенные на его верхней части. В других вариантах реализации также возможны другие варианты расположения кнопок и/или индикаторов. В одном из вариантов реализации ручной зонд 100 содержит захват 148, расположенный в его нижней части, и соединитель 140, расположенный в отдаленном от гибкого соединителя 145 конце зонда. В одном из вариантов реализации захват 148 содержит дополнительное свободное пространство в корпусе ручного зонда 100, которое обеспечивает возможность поступательно-возвратного перемещения стержня с магнитным наконечником (433 и 432 на фиг.7) для обеспечения прямолинейного перемещения преобразующего модуля, не задевая корпус ручного зонда. Благодаря этому пользователь может манипулировать ручным зондом 100, удерживая его как в правой, так и в левой руке. В дополнение к этим аспектам пользователь может управлять кнопкой 150 визуализации и кнопкой 160 обработки с большим или другим пальцем, например указательным пальцем. Внутри ручной зонд 100 может содержать электронные платы с возможностью записи на них программного обеспечения, средства связи и/или соединения для передачи сигналов в эти электронные платы и из них. В одном из вариантов реализации ручной зонд 100 содержит электронный интерфейс 175 (здесь не показан, но показан на других чертежах), связанный по меньшей мере с одной из кнопок 150 визуализации и 160 обработки. В соответствии с одним из вариантов реализации электронный интерфейс 175 может взаимодействовать с внешним источником, таким как, например, управляющее устройство 300. В различных вариантах реализации индикатор 145 может быть светодиодом, световым индикатором, звуковым сигналом и их комбинациями. В одном аспекте вариантов реализации индикатором 155 является светодиод, который может менять цвет в зависимости от состояния CTS 20. Например, индикатор 155 может светиться одним цветом (или не светиться) в режиме ожидания, вторым цветом в режиме визуализации и третьим цветом в режиме обработки.
[0070] В одном из вариантов реализации приемопередающий модуль 200 выполнен с возможностью механического и электрического соединения разъемным способом с ручным зондом 100. В одном из вариантов реализации перемещающий механизм 400 (показанный на фиг.7) выполнен с возможностью перемещения ультразвукового преобразователя 280 в приемопередающем модуле 200, как проиллюстрировано в различных вариантах реализации на фиг.4-6. Пользователь может извлечь указанный преобразующий модуль из его защитного, герметично закрывающегося чехла, отложить в сторону указанный чехол, предназначенный для хранения преобразующего модуля между процедурами, в случае необходимости. В одном из вариантов реализации ручной зонд 100 и приемопередающий модуль 200 могут быть соединены перемещением соединителя 140 вверх и путем введения приемопередающего модуля 200 в ручной зонд 100, как показано на фиг.1. В одном из вариантов реализации управляющее устройство 300 автоматически обнаруживает вставленный приемопередающий модуль 200 и соответствующим образом обновляет экран интерактивного графического дисплея 310. В одном из вариантов реализации приемопередающий модуль 200, будучи полностью вставленным в ручной зонд 100 фиксируется в нем, когда соединитель 140 на конце ручного зонда 100 нажат вниз. Для разъединения приемопередающего модуля 200 пользователю достаточно поднять соединитель 140 на конце ручного зонда 100 и скользящим движением вынуть приемопередающий модуль 200 из ручного зонда 100.
[0071] На фиг.4 и 5 проиллюстрирован показанный с двух противоположных сторон один из вариантов исполнения приемопередающего модуля 200, содержащего корпус 220 и акустически прозрачный элемент 230. В одном из вариантов реализации корпус 220 может содержать крышку 222, которая может быть съемной или постоянно соединена с корпусом 220. В одном из вариантов реализации приемопередающий модуль 200 содержит интерфейсную направляющую 235 и/или по меньшей мере одну боковую направляющую 240, предназначенную для более легкого соединения приемопередающего модуля 200 с ручным зондом 100. Приемопередающий модуль 200 может содержать преобразователь 280, который может излучать энергию через акустически прозрачный элемент 230. Акустически прозрачный элемент 230 может быть окном, фильтром и/или линзой. Акустически прозрачный элемент 230 может быть изготовлен из любого материала, который является прозрачным для энергии, излученной преобразователем 280. В одном из вариантов реализации акустически прозрачный элемент 230 является прозрачным для ультразвуковой энергии.
[0072] В различных вариантах реализации преобразователь 280 связан с управляющим устройством 300. В одном из вариантов реализации преобразователь 280 электрически подключен к ручному зонду 100 и/или управляющему устройству 300. В одном из вариантов реализации корпус 220 герметично закрыт крышкой 222, и общая конструкция корпуса 220 и крышки 222 выполнена с возможностью защиты от проникновения жидкости (не показана). Как показано на фиг.6, согласно варианту реализации корпус 220 приемопередающего модуля 200 может иметь отверстие 275, которое обеспечивает возможность сопряжения ручного зонда 100 с преобразующим модулем 200 без нарушения герметичности конструкции корпуса 220 и крышки 222. Кроме того, крышка 222 может содержать по меньшей мере одно отверстие, например первое отверстие 292, второе отверстие 293 и третье отверстие 294. Отверстия в крышке 222 могут быть использованы для обеспечения электрического подключения преобразователя 280 к ручному зонду 100 и/или управляющему устройству 300. В одном из вариантов реализации по меньшей мере один из портов в крышке 222 может быть использован для взаимодействия с датчиком 201, который может быть использован в приемопередающем модуле 200. Датчик 201 может быть связан с управляющим устройством 300. В некоторых вариантах реализации используются несколько датчиков 201.
[0073] В различных вариантах реализации, как показано в блок-схеме на фиг.6, преобразователь 280 выполнен с возможностью перемещения внутри приемопередающего модуля 200. Преобразователь 280 удерживается держателем 289 преобразователя. В одном из вариантов реализации держатель 289 содержит втулку 287, которая перемещается вместе с движением поддерживающих подшипников, таких как линейные подшипники, а именно шток (или вал) 282, обеспечивая возвратно-поступательное линейное перемещение преобразователя 280. В одном из вариантов реализации втулка 287 представляет собой шлицевую втулку, которая предотвращает поворот вокруг шлицевого вала 282, но также для обеспечения линейного перемещения может быть использована любая другая направляющая. В одном из вариантов реализации держатель 289 преобразователя приводится в движение перемещающим механизмом 400, который может быть расположен в ручном зонде 100 или в приемопередающем модуле 200. Перемещающий механизм 400, который описан далее со ссылкой на фиг.7, содержит привод 403 кулисы с перемещающимся элементом 432 и магнитом 433, размещенным на дальнем конце перемещающегося элемента 432. Магнит 433 способствует перемещению преобразователя 280. Одно из преимуществ перемещающего механизма, такого как перемещающий механизм 400, состоит в том, что он обеспечивает более эффективное, надежное и точное использование ультразвукового преобразователя 280 как при визуализации, так и для обработки. Одно из преимуществ, которыми этот тип перемещающего механизма отличается от традиционных установок с несколькими преобразователями, размещенными внутри корпуса, состоит в том, что эти несколько преобразователей расположены друг от друга на неизменном расстоянии. Благодаря размещению преобразователя 280 на линейной направляющей под управлением управляющего устройства 30, варианты реализации предложенных системы и устройства обеспечивают адаптируемость и гибкость в дополнение к вышеуказанным эффективности, надежности и точности. Регулировки управляемого перемещения посредством перемещающего механизма 400 при визуализации и обработке могут быть выполнены, по существу, практически в реальном времени. В дополнение к возможности выбирать практически почти любое разрешение, используя возможность подстройки, обеспеченную перемещающим механизмом 400, может быть также осуществлена регулировка, если при визуализации обнаружены расстройства или условия, требующие изменений в расположении области обработки и условий наведения.
[0074] В одном из вариантов реализации по меньшей мере один датчик 201 может входить в состав приемопередающего модуля 200. В одном из вариантов реализации, по меньшей мере, один датчик 201 может входить в состав приемопередающего модуля 200, обеспечивая контроль наличия связи между перемещением перемещающегося элемента 432 и держателя 289 преобразователя. В одном из вариантов реализации кодер 283 может быть расположен в верхней части держателя 289 преобразователя, а датчик 201 может быть расположен в сухой части приемопередающего модуля 200, или наоборот (могут быть расположены с взаимной переменой мест). В различных вариантах реализации датчик 201 является магнитным датчиком, таким как датчик на основе сильного магниторезистивного эффекта (GMR) или эффекта Холла, и кодер является магнитом, набором магнитов или многополюсной магнитной полосой. Датчик может быть расположен, как и преобразующий модуль, в отдельном отсеке. В одном из вариантов реализации датчик 201 является датчиком контактного давления. В одном из вариантов реализации датчик 201 является датчиком контактного давления на поверхность устройства, обеспечивающим определение положения устройства или преобразователя на субъекте. В различных вариантах реализации датчик 201 может быть использован для отображения положения устройства или компонента устройства в одном, двух или трех измерениях. В одном из вариантов реализации датчик 201 выполнен с возможностью распознавания положения, угла, наклона, ориентации, размещения, возвышения или других характеристик положения устройства (или его компонента) по отношению к субъекту. В одном из вариантов реализации датчик 201 содержит оптический датчик. В одном из вариантов реализации датчик 201 содержит шариковый датчик. В одном из вариантов реализации датчик 201 выполнен с возможностью отображения положения в одном, двух и/или трех измерениях для вычисления расстояния между областями или линиями обработки на коже или в ткани субъекта. Перемещающий механизм 400 может быть любым перемещающим механизмом, пригодным для обеспечения перемещения преобразователя 280. Другие варианты реализации перемещающих механизмов, подходящих для использования здесь, могут содержать червячные редукторы и т.п. В различных вариантах реализации настоящего изобретения перемещающий механизм расположен в приемопередающем модуле 200. В различных вариантах реализации перемещающий механизм может обеспечивать линейное, вращательное перемещение и перемещение в нескольких измерениях, и перемещение может содержать любой набор точек и/или ориентации в пространстве. Различные варианты осуществления перемещения могут быть использованы в соответствии с различными вариантами реализации изобретения, включая, помимо прочего, прямолинейное, круговое, эллиптическое, дугообразное, спиральное, набор по меньшей мере из одной точки в пространстве, или любое другое одно-, двух- или трехпозиционные и установочные варианты осуществления перемещения. Скорость перемещающего механизма 400 может быть постоянной или может регулироваться пользователем. В одном из вариантов реализации скорость перемещающего механизма 400 при визуализации может отличаться от скорости при лечении. В одном из вариантов реализации скоростью перемещающего механизма 400 управляет управляющее устройство 300.
[0075] Преобразователь 280 может иметь возможность перемещения 272, при котором излученная энергия 50 может быть излучена сквозь акустически прозрачный элемент 230. В одном из вариантов реализации перемещение 272 описано как перемещение преобразователя 280 от края до края в пределах возможного диапазона перемещения. В одном из вариантов реализации перемещение 272 преобразователя 280 может лежать в пределах от примерно 100 мм до примерно 1 мм. В одном из вариантов реализации перемещение 272 может быть примерно 25 мм. В одном из вариантов реализации перемещение 272 может быть примерно 15 мм. В одном из вариантов реализации перемещение 272 может быть примерно 10 мм. В различных вариантах реализации перемещение 272 может быть в пределах примерно 0-25 мм, 0-15 мм, 0-10 мм.
[0076] Преобразователь 280 может иметь расстояние 270 смещения, которое представляет собой расстояние между преобразователем 280 и акустически прозрачным элементом 230. В различных вариантах реализации настоящего изобретения преобразователь 280 может отображать и лечить интересующую область примерно 25 мм, и может отображать глубину меньше чем примерно 10 мм. В одном из вариантов реализации приемопередающий модуль 200 имеет расстояние 270 смещения для обработки на глубине 278 примерно 4,5 мм ниже поверхности 501 кожи (как показано на фиг.15).
[0077] В различных вариантах реализации преобразующие модули 200 могут быть выполнены с различными или изменяемыми ультразвуковыми характеристиками. Например, в различных, но не ограничивающих вариантах реализации ультразвуковые характеристики могут зависеть от таких параметров преобразователя 280, как форма, размер, временные параметры, пространственная конфигурация, частота, изменения пространственных параметров, изменения временных параметров, формирование коагуляции, глубина, ширина, коэффициент поглощения, коэффициент рефракции, глубина ткани и/или другие характеристики ткани. В различных вариантах реализации изменяемый ультразвуковой параметр может быть изменен, или модифицирован для воздействия на формирование поврежденной ткани для достижения необходимого косметического эффекта. В различных вариантах реализации изменяемый ультразвуковой параметр может быть изменен или модифицирован для воздействия на формирование поврежденной ткани для достижения необходимого лечебного эффекта. Например, один из изменяемых ультразвуковых параметров относится к конфигурациям, связанным с глубиной ткани 278. В нескольких вариантах реализации преобразующий модуль 200 выполнен с возможностью как ультразвуковой визуализации, так и обработки ультразвуком, и функционально соединен по меньшей мере с одним органом управления 150, 160 и перемещающим механизмом 400. Преобразующий модуль 200 выполнен с возможностью применения ультразвуковой терапии с первым ультразвуковым параметром и вторым ультразвуковым параметром. В различных вариантах реализации первый и второй ультразвуковые параметры выбраны из группы, состоящей из следующих: изменяемая глубина, переменная частота и изменяемая геометрия. Например, в одном из вариантов реализации одиночный преобразующий модуль 200 обеспечивает ультразвуковую терапию по меньшей мере на двух глубинах 278, 278'. В другом варианте реализации каждый по меньшей мере из двух взаимозаменяемых преобразующих модулей 200 обеспечивает различную глубину 278 (например, один модуль оказывает воздействие на глубине 3 мм, в то время как другой модуль на глубине в 4,5 мм). Еще в одном варианте реализации одиночный преобразующий модуль 200 обеспечивает ультразвуковую терапию по меньшей мере на двух частотах, конфигурациях, амплитудах, скоростях, типах и/или длинах волны. В других вариантах реализации каждый по меньшей мере из двух взаимозаменяемых преобразующих модулей 200 обеспечивает различные значения параметра. В одном из вариантов реализации одиночный преобразующий модуль 200 может работать по меньшей мере на двух различных глубинах 278, 278' и по меньшей мере на двух различных частотах (или других параметрах). Возможность использования изменяемых параметров, в частности, предпочтительна в некоторых вариантах реализации, поскольку обеспечивается улучшенное управление лечением ткани и оптимизацией структуры пораженных участков ткани, коагуляцией ткани, объемом обработки и т.д.
[0078] На фиг.15 показан один из вариантов выбора глубины 278, которая соответствует глубине мышечной ткани. В различных вариантах реализации глубина 278 может соответствовать любой слою ткани: кожи, дермы, жира, SMAS, мышечной или другой ткани. В некоторых вариантах реализации могут быть обработаны различные типы ткани для обеспечения синергетического эффекта, оптимизируя, таким образом, результаты обработки. В другом варианте реализации приемопередающий модуль имеет расстояние 270 смещения для обработки на глубине 278 примерно на 3,0 мм ниже поверхности 501. В различных вариантах реализации это расстояние смещения может быть различным, так что преобразователь 280 может излучать энергию на желательную глубину 278 ниже поверхности 501. В различных вариантах реализации в режиме обработки пучки акустической энергии из преобразователя 280 могут создавать линейную последовательность индивидуальных тепловых областей 550 поражения. В одном из вариантов реализации индивидуальные тепловые области 550 поражения являются дискретными. В одном из вариантов реализации индивидуальные тепловые области 550 поражения перекрывают друг друга. В различных вариантах реализации преобразователь 280 может обеспечивать визуализацию на глубине примерно между 1 и 100 мм. В одном из вариантов реализации глубина визуализации преобразователя может составлять примерно 20 мм. В одном из вариантов реализации преобразователь 280 может лечить на глубине примерно в пределах 0-25 мм. В одном из вариантов реализации глубина обработки преобразователя может составлять примерно 4,5 мм.
[0079] В любом из вариантов реализации, описанных здесь, глубина обработки преобразователя может составлять примерно 0,5 мм, 1 мм, 1,5 мм, 2 мм, 3 мм, 4 мм, 4,5 мм, 5 мм, 6 мм, 10 мм, 15 мм, 20 мм, 25 мм, или любую другую величину в диапазоне 0-100 мм. Лечение на различной глубине, включая лечение одной и той же ткани на различных глубинах или лечение различных тканей, может улучшить результаты обработки посредством синергетического эффекта.
[0080] В различных вариантах реализации настоящего изобретения преобразователь 280 выполнен с возможностью излучения ультразвуковой энергии для визуализации, диагностики, обработки и их комбинаций. В одном из вариантов реализации преобразователь 280 выполнен с возможностью излучения ультразвуковой энергии на заданную глубину в интересующей области для воздействия на заданную ткань, расположенную в интересующей области, такую как мышечная ткань, вызывающая сморщивание кожи, как описано далее. В этом варианте реализации преобразователь 280 может быть выполнен с возможностью излучения нефокусированной ультразвуковой энергии в широкой требуемой области 65 в целях обработки (как показано на фиг.12 и 22). В одном из вариантов реализации приемопередающий модуль 200 содержит преобразователь 280, который может визуализировать и лечить область ткани 25 мм в длину, и может визуализировать ее на глубине до 8 мм. Лечение происходит вдоль линии, которая меньше или равна активной длине преобразователя, указанной в одном варианте реализации отметками (не показаны) на сторонах приемопередающего модуля 200 рядом с акустически прозрачным элементом 230 около поверхности кожи субъекта. В одном из вариантов реализации маркированная направляющая линия на переднем конце преобразователя 280 обозначает центр линии обработки. В одном из вариантов реализации режима обработки пучки звуковой энергии создают линейную последовательность индивидуальных тепловых областей коагуляции. В одном из вариантов реализации индивидуальные тепловые области коагуляции являются дискретными. В одном из вариантов реализации индивидуальные тепловые области коагуляции перекрывают друг друга. Маркировка (не показана) может быть нанесена или выгравирована на боковой или верхней поверхности приемопередающего модуля 200 для указания типа, даты истечения срока использования и другой информации о преобразователе 280. В одном из вариантов реализации приемопередающий модуль 200 может быть снабжен маркировкой для отслеживания таких параметров, как тип используемого преобразователя 280, частота и глубина обработки, уникальный серийный номер, обозначение изделия и дата изготовления. В одном из вариантов реализации приемопередающие модули 200 являются одноразовыми. В одном из вариантов реализации система отслеживает время использования приемопередающих модулей 200 для определения оставшегося срока службы приемопередающего модуля 200, поскольку ресурс работы преобразователя сокращается при его использовании. Если преобразователь 280 теряет свои свойства, то приемопередающий модуль 200 может менее эффективно выполнять свои функции. В одном из вариантов реализации приемопередающий модуль 200 или управляющее устройство 300 отслеживают использование и предотвращают использование приемопередающего модуля 200 после истечения рекомендуемого срока использования, обеспечивая безопасное и эффективное использование устройства. Эта возможность, обеспечивающая безопасность использования, может быть сформирована на основании тестовых данных.
[0081] В одном из вариантов реализации приемопередающий модуль 200 выполнен для обработки с частотой примерно 4 МГц, на глубину примерно 4,5 мм и диапазоном глубины визуализации примерно 0-8 мм. В одном из вариантов реализации приемопередающий модуль 200 выполнен для обработки с частотой примерно 7 МГц, на глубину примерно 3,0 мм и диапазоном глубины визуализации примерно 0-8 мм. В одном из вариантов реализации приемопередающий модуль 200 выполнен для обработки с частотой примерно 7 МГц, на глубину примерно 4,5 мм и диапазоном глубины визуализации примерно 0-8 мм.
[0082] Преобразователь 280 может содержать по меньшей мере один преобразователь, обеспечивающий визуализацию и/или лечение. Преобразователь 280 может содержать пьезоэлектрик, такой как, например, цирконат-титанат свинца, или другие пьезоэлектрики, такие как, помимо прочего, пьезоэлектрические, керамические, кристаллические, пластиковые и/или составные материалы, а также ниобат лития, титанат свинца, титанат бария и/или метаниобат свинца, содержащие пьезоэлектрические, токопроводящие и пластиковые пленочные слои, уложенные на сферически сфокусированном материале подложки. В дополнение к пьезоэлектрику или вместо него преобразователь 280 может содержать любые другие материалы, выполненные с возможностью излучения акустической энергии. Преобразователь 280 также может содержать по меньшей мере один согласующий и/или защитный слой, соединенный с пьезоэлектриком. Преобразователь 280 также может быть выполнен с одним или несколькими амортизирующими элементами.
[0083] В одном из вариантов реализации толщина преобразующего элемента преобразователя 280 может быть стандартной. Таким образом, преобразующий элемент может быть выполнен с толщиной, которая является в общем, по существу, одинаковой для всех вариантов реализации. В другом варианте реализации преобразующий элемент также может быть выполнен с переменной толщиной и/или в виде составного задемпфированного устройства. Например, преобразующий элемент преобразователя 280 может быть выполнен с первой толщиной, выбранной для обеспечения средней рабочей частоты низкого диапазона, например, от примерно 1 МГц до примерно 10 МГц. Преобразующий элемент также может быть выполнен со второй толщиной, выбранной для обеспечения средней рабочей частоты в более высоком диапазоне, например, от примерно 10 МГц до более чем 100 МГц.
[0084] Еще в одном варианте реализации преобразователь 280 выполнен в форме одиночного широкополосного преобразователя, работающего, по меньшей мере, на двух частотах для обеспечения соответствующего увеличения температуры на участке обработки в интересующей области до необходимого уровня, как описано далее. Преобразователь 280 может быть выполнен в виде по меньшей мере двух отдельных преобразователей, так что каждый преобразователь 280 может содержать преобразующий элемент. Толщина преобразующих элементов может быть выбрана с возможностью обеспечения средних рабочих частот, лежащих в требуемом для обработки диапазоне. Например, в одном варианте реализации преобразователь 280 может содержать первый преобразователь, снабженный первым преобразующим элементом, имеющим толщину, соответствующую средней частоте, в диапазоне от примерно 1 МГц до примерно 10 МГц, и второй преобразователь, снабженный вторым преобразующим элементом, имеющим толщину, соответствующую средней частоте, от примерно 10 МГц до более чем 100 МГц. Могут применяться различные другие комбинации и диапазоны толщин для первого и/или второго преобразующего элемента для фокусировки энергии на заданных глубинах ниже поверхности 501 в заданных диапазонах частот и/или для заданного излучения энергии.
[0085] Преобразующие элементы преобразователя 280 могут быть вогнутыми, выпуклыми и/или плоскими. В одном из вариантов реализации преобразующие элементы выполнены вогнутыми для обеспечения фокусированной энергии для обработки интересующей области. Дополнительные варианты выполнения преобразователей раскрыты в патентной заявке США №10/944,500, "Система и способ для обработки ультразвуком с изменяемой глубиной", включенной в настоящую заявку ссылкой полностью.
[0086] Кроме того, преобразователь 280 может быть расположен на любом расстоянии от поверхности 501. В этом отношении он может быть расположен далеко от поверхности 501 внутри длинного преобразователя или он может быть расположен на расстоянии лишь несколько миллиметров от поверхности 501. Это расстояние может быть определено в соответствии с конструкцией с учетом расстояния 270 смещения, как описано выше. В некоторых вариантах реализации расположение преобразователя 280 ближе к поверхности 501 улучшает излучение ультразвука на более высоких частотах. Кроме того, в настоящем изобретении могут быть использованы двумерные и трехмерные матрицы элементов. Кроме того, преобразователь 280 может содержать отражающую поверхность, наконечник или область в конце преобразователя 280, которые излучают ультразвуковую энергию. Эта отражающая поверхность может улучшить, увеличить или иным образом изменить ультразвуковую энергию, излученную из CTS 20.
[0087] В различных вариантах реализации любой набор по меньшей мере из одного преобразователя 280 может быть использован для различных функций, таких как раздельные лечение/визуализация или двойной режим (как лечение, так и визуализация), или только для обработки. В различных вариантах реализации визуализирующий элемент (визуализирующие элементы) может быть расположен сбоку от лечебного элемента (рядом с ним) или в любом другом положении по ширине и/или высоте относительно лечебного элемента, или даже внутри лечебного элемента (лечебных элементов). Могут быть использованы по меньшей мере одна глубина обработки и частота и по меньшей мере один элемент визуализации, или по меньшей мере один элемент двойного режима. В различных вариантах реализации любое управляемое средство перемещения активного преобразующего элемента (элементов) внутри корпуса приемопередающего модуля 200 может представлять собой жизнеспособный вариант реализации.
[0088] В различных вариантах реализации приемопередающий модуль 200 также может быть выполнен различными способами и может содержать несколько компонентов и частей многоразового и/или одноразового использования в различных вариантах реализации для облегчения его работы. Например, приемопередающий модуль 200 может быть выполнен в корпусе зонда преобразователя любого типа или с любым расположением для облегчения соединения преобразователя 280 с поверхностью ткани, причем такой корпус может иметь различные формы, контуры и конфигурации. Приемопередающий модуль 200 может содержать средство согласования любого типа, такое, например, как средство электрического согласования, которое может быть снабжено электрическим переключением, или может быть мультиплексирующими схемами и/или схемами выбора апертуры/элемента, и/или устройствами для идентификации зонда, для сертификации ручки зонда, средством электрического согласования, средством хронологии использования и калибровки преобразователя, таким как по меньшей мере одно серийное СППЗУ (устройство памяти).
[0089] В различных вариантах реализации приемопередающий модуль 200 также может содержать кабели и соединители, перемещающие механизмы, датчики перемещения и кодеры, тепловые отслеживающие датчики и/или переключатели, относящиеся к управлению и состоянию пользователя, и индикаторы, такие как светодиоды. В одном из вариантов реализации перемещающий механизм, подобный перемещающему механизму 400, описанному вместе с ручным зондом 100, может быть использован для приведения в действие приемопередающего модуля 200 изнутри самого приемопередающего модуля 200. В одном из вариантов реализации ручной зонд 100 выполнен с возможностью электрического соединения с приемопередающим модулем 200 для приведения в действие приемопередающего модуля 200 изнутри самого себя. В различных вариантах реализации перемещающий механизм (в любом из вариантов реализации, описанных здесь) может быть использован для управляемого создания нескольких областей воздействия, или распознавание перемещения самого зонда может быть использовано для управляемого создания нескольких областей воздействия и/или для прекращения создания указанных областей 550 воздействия, как описано здесь. Например, в одном варианте реализации в целях обеспечения безопасности, если приемопередающий модуль 200 внезапно толкнут или уронят, датчик может передать это действие управляющему устройству 300 для инициации корректирующего действия или отключения приемопередающего модуля 200. Дополнительно для поддержки зонда во время использования может быть использовано внешнее плечо датчика движения, в результате чего пространственное положение и ориентация приемопередающего модуля 200 будут переданы управляющему устройству 300 для облегчения управляемого создания области воздействия 550. Кроме того, другие чувствительные функциональные средства, такие как профилометры или другие средства визуализации, могут быть встроены в приемопередающий модуль 200 в соответствии с различными вариантами реализации. В одном из вариантов реализации импульсные эхо-сигналы, направленные к приемопередающему модулю 200 и от него, используются для отслеживания параметра ткани в области 550 обработки.
[0090] Соединяющие компоненты могут содержать различные устройства, облегчающие взаимодействие приемопередающего модуля 200 с интересующей областью. Например, указанные соединяющие компоненты могут содержать систему акустического охлаждения и соединения, выполненную с возможностью акустической передачи ультразвуковой энергии и сигналов. Акустическая система охлаждения/соединения, снабженная средствами возможного соединения, такими как коллекторы, может быть использована для передачи звука в интересующую область, управления температурой на поверхности и в глубине ткани, для обеспечения фокусировки заполненных жидкостью линз и/или удаления отходящего тепла из преобразователя. Система соединения может облегчить такую передачу путем использования по меньшей мере одной передающей среды, содержащей воздух, газы, воду, жидкости, текучие среды, гели, твердые частицы и/или любую их комбинацию, или любую другую среду, которая обеспечивает передачу сигналов между преобразователем 280 и интересующей областью. В одном из вариантов реализации в преобразователе используется по меньшей мере одна передающая среда. В одном из вариантов реализации заполненный текучей средой приемопередающий модуль 200 содержит в корпусе по меньшей мере одну передающую среду. В одном из вариантов реализации заполненный текучей средой приемопередающий модуль 200 содержит по меньшей мере одну передающую среду в герметичном корпусе, который отделен от сухой части ультразвукового устройства.
[0091] В дополнение к функции соединения, в соответствии с одним вариантом реализации система соединения также может быть выполнена с возможностью обеспечения управления температурой во время лечебного применения. Например, система соединения может быть выполнена с возможностью управляемого охлаждения поверхности кожи или области между приемопередающим модулем 200 и интересующей областью и за ее пределами путем соответствующего управления температурой передающей среды. Подходящая температура для такой передающей среды может быть достигнута разными способами и с использованием различных систем с обратной связью, таких как термопары, термисторы или любое другое устройство, или система, выполненные с возможностью измерения температуры передающей среды. Такое управляемой охлаждение может быть выполнено с возможностью дополнительного облегчения управления пространственной и/или тепловой энергией приемопередающего модуля 200.
[0092] В одном из вариантов реализации приемопередающий модуль 200 соединен с перемещающим механизмом 400 в ручном зонде 100. В одном из вариантов реализации перемещающий механизм 400 может быть размещен в приемопередающем модуле 200. Один из вариантов выполнения перемещающего механизма 400 проиллюстрирован на фиг.7, на котором изображен двухфазный шаговый двигатель 402 и привод 403 кулисы для осуществления линейного перемещения. Шаговый двигатель 402 вращается, как указано стрелкой 405, и перемещает штифт 404 по круговому пути. Штифт 404 скользит в вырезе 406 привода 403 кулисы. Это скольжение заставляет привод 403 кулисы совершать линейное перемещение. Привод 403 кулисы поддерживается направляющими 410, и скользящие элементы 412 могут быть расположены между приводом 403 кулисы и направляющей 410. В одном из вариантов реализации направляющая 410 является винтом с утолщенным стержнем. Варианты выполнения скользящего элемента 412 могут содержать любой материал или любое механическое устройство, которые уменьшают коэффициент трения между направляющей 410 и приводом 403 кулисы, или любые линейные подшипники. Например, в различных вариантах реализации скользящий элемент 412 может быть по меньшей мере одним из следующего: упругий материал, смазка, шарикоподшипники, полированная поверхность, магнитное устройство, сжатый газ или любой другой материал или устройство, подходящее для использования при скольжении.
[0093] Датчик 425 действует в качестве одного из вариантов выполнения датчика положения путем считывания кодера 430, который установлен на приводе кулисы 403. В одном из вариантов реализации полоса кодера 430 представляет собой оптический кодер, который имеет шаг в диапазоне от примерно 1,0 мм до примерно 0,01 мм. В одном из вариантов реализации указанный шаг может быть примерно 0,1 мм. Полоса кодера 430 может содержать индексные отметки в каждом конце ее перемещения. Направление перемещения полосы кодера 430 может быть определено путем сравнения фазы двух отдельных каналов в оптическом датчике 425. В одном из вариантов реализации полоса кодера 430 имеет по меньшей мере одно начальное положение, которое может быть подходящим для использования в калибровке положения и перемещения привода 403 кулисы.
[0094] В одном из вариантов реализации перемещение привода кулисы 403 передается через перемещающий механизм 432, так что преобразователь 280 линейно перемещается в приемопередающем модуле 200. В одном из вариантов реализации привод 403 кулисы содержит перемещающийся элемент 432 и магнитный соединитель 433, расположенный в отдаленном конце перемещающегося элемента 432. Перемещающийся элемент 432 может иметь размер, подходящий для перемещения сквозь непроницаемое для жидкости уплотнение или внутри него.
[0095] Преобразователь 280 может иметь расстояние перемещения 272. Система соединения может облегчать такое соединение. На фиг.8 показана блок-схема, иллюстрирующая различные варианты реализации CTS 20. В одном из вариантов реализации управляющее устройство 300 содержит подсистему 340 управляющего устройства, терапевтическую подсистему 320, подсистему 350 визуализации, встроенный главный компьютер 330 (с программным обеспечением) и интерактивный графический дисплей 310. В одном из вариантов реализации терапевтическая подсистема 320, подсистема 340 управляющего устройства и/или подсистема 350 визуализации взаимодействуют с ручным зондом 100 и/или приемопередающим модулем 200. В различных вариантах реализации CTS 20 имеет встроенные в управляющее устройство 300 ограничители величины энергии 50, которая может быть излучена приемопередающим модулем 200. Эти ограничители могут быть заданы временем излучения, частотой излученной энергии, мощностью излучения, температурой и/или их комбинациями. Температура может быть получена из отслеживания поверхности 501 и/или отслеживания приемопередающего модуля 200. Согласно одному из вариантов реализации, указанные ограничители могут быть предварительно заданы и не могут быть изменены пользователем.
[0096] Согласно различным вариантам реализации, если приемопередающий модуль 200 взаимодействует с поверхностью 501, которая может быть поверхностью кожи субъекта, CTS 20 может визуализировать и/или обрабатывать область 272 обработки. В некоторых аспектах этих вариантов реализации визуализация, которую выполняет CTS 20, может перекрывать, по существу, всю область 272 обработки на указанных глубинах 278 ниже поверхности 501. В некоторых аспектах этих вариантов реализации лечение может содержать дискретное излучение энергии 50 для создания областей 550 воздействия с интервалами вдоль области 272 обработки и на указанных глубинах 278. В одном из вариантов реализации интервалы являются дискретными. В одном из вариантов реализации интервалы являются перекрывающимися.
[0097] В различных вариантах реализации подсистемой 350 визуализации можно манипулировать в В-режиме. Подсистема 350 визуализации может оказывать поддержку приемопередающему модулю 200, так что приемопередающий модуль 200 может иметь энергию 50 излучения на частотах от примерно вокруг 10 МГц до более чем 100 МГц. В одном из вариантов реализации частота излучения составляет примерно 18 МГц. В одном из вариантов реализации частота излучения составляет примерно 25 МГц. Подсистема 350 визуализации может поддерживать любую частоту кадров, которая может быть подходящей для использования в данных применениях. В некоторых вариантах реализации частота кадров может быть в диапазоне от примерно 1 кадра в секунду (далее - FPS) до примерно 100 FPS, или от примерно 5 FPS до примерно 50 FPS, или от примерно 5 FPS до примерно 20 FPS номинально. Полем обзора визуализации может управлять область визуализации преобразователя 280 в фокусе преобразователя 280 на заданной глубине 278 ниже поверхности 501, как описано здесь. В различных вариантах реализации поле обзора может составлять меньше 20 мм в глубину и 100 мм в ширину или меньше 10 мм в глубину и меньше 50 мм в ширину. В одном из вариантов реализации особенно подходящее для использования поле обзора визуализации составляет примерно 8 мм в глубину и примерно до 25 мм в ширину.
[0098] Разрешением поля обзора можно управлять градуировкой перемещающего механизма 400. Также любой шаг может быть подходящим для использования в градуировке перемещающего механизма 400. В одном из вариантов реализации разрешением поля обзора может управлять разрешение кодера 430 и датчика 425. В одном из вариантов реализации поле обзора при просмотре может иметь шаг в диапазоне от 0,01 мм до 0,5 мм или от примерно 0,05 мм до примерно 0,2 мм. В одном из вариантов реализации особенно подходящий для использования шаг линии для поля обзора изображения составляет примерно 0,1 мм.
[0099] Согласно различным вариантам реализации подсистема 350 визуализации может выполнять по меньшей мере одну функцию. В одном из вариантов реализации по меньшей мере одна функция может содержать любой из следующих В-режимов: сканирование изображения, фиксация изображения, яркость изображения, измерение расстояния, текстовая аннотация к изображению, сохранение изображения, распечатка изображения и/или их комбинации. В различных вариантах реализации настоящего изобретения подсистема 350 визуализации содержит электронное средство эхо-импульсной визуализации.
[0100] Различные варианты реализации терапевтической подсистемы 320 содержат радиочастотную (далее - RF) усиливающую схему, которая может доставлять и/или отслеживать энергию, направленную в преобразователь 280. В одном из вариантов реализации терапевтическая подсистема 320 может управлять акустической мощностью преобразователя 280. В одном из вариантов реализации акустическая мощность может быть в пределах от 1 ватта (далее - Вт) до примерно 100 Вт в диапазоне частот от примерно 1 МГц до примерно 10 МГц, или от примерно 10 Вт до примерно 50 Вт в диапазоне частот от примерно 3 МГц до примерно 8 МГц. В одном из вариантов реализации акустическая мощность и частоты составляют примерно 40 Вт примерно на 4,3 МГц и примерно 30 Вт примерно на 7,5 МГц. Акустическая энергия, обеспеченная этой акустической мощностью, может быть примерно от 0,01 джоуля (далее - Дж) до примерно 10 Дж или примерно 2 Дж до примерно 5 Дж. В одном из вариантов реализации акустическая энергия лежит в диапазоне меньше, чем примерно 3 Дж.
[0101] В различных вариантах реализации терапевтическая подсистема 320 может управлять временем работы преобразователя 280. В одном из вариантов реализации время работы может быть от примерно 1 миллисекунды (далее - мс) до примерно 100 мс или примерно от 10 мс до примерно 50 мс. В одном из вариантов реализации периоды работы могут быть примерно 30 мс для излучения на частоте 4,3 МГц и примерно 30 мс для излучения на частоте 7,5 МГц.
[0102] В различных вариантах реализации терапевтическая подсистема 320 может управлять частотой привода преобразователя 280, перемещающегося на расстояние перемещения 272. В различных вариантах реализации частота преобразователя 280 основана на приемопередающем модуле 200, соединенном с ручным зондом 100. Согласно некоторым вариантам реализации частота этого перемещения может быть в диапазоне от примерно 1 МГц до примерно 10 МГц, или от примерно 4 МГц до примерно 8 МГц. В одном из вариантов реализации частоты этого перемещения составляют примерно 4,3 МГц или примерно 7,5 МГц. Как описано здесь, расстояние перемещения 272 может быть различным, и в одном варианте реализации расстояние перемещения 272 составляет примерно 25 мм.
[0103] Согласно различным вариантам реализации терапевтическая подсистема 320 может управлять линейным сканированием вдоль расстояния перемещения 272, и это линейное сканирование может варьироваться от 0 до полного расстояния перемещения 272. В одном из вариантов реализации линейное сканирование может лежать в диапазоне от примерно 0 до примерно 25 мм. Согласно одному из вариантов реализации линейное сканирование может иметь возрастающее излучение энергии 50 с шагом 295 следования импульсов обработки, и этот шаг следования импульсов обработки может лежать в пределах от примерно 0,01 мм до примерно 25 может быть, или от 0,2 мм до примерно 2,0 мм. В одном из вариантов реализации шаг 295 следования импульсов обработки составляет примерно 1,5 мм. В различных вариантах реализации шаг 295 следования импульсов обработки может быть предварительно заданным, постоянным, изменяемым, программируемым и/или изменяемым в любой точке до, во время или после линейной обработки. Разрешение линейного сканирования пропорционально разрешению перемещающего механизма 400. В различных вариантах реализации разрешение, которое управляется терапевтической подсистемой 320, эквивалентно разрешению, которым управляет подсистема 350 визуализации, и также может быть расположена в том же диапазоне, как описано для подсистемы 350 визуализации.
[0104] В различных вариантах реализации терапевтическая подсистема 320 может выполнять по меньшей мере одну функцию. В одном из вариантов реализации по меньшей мере одна функция может содержать любое из следующего: управление энергией излучения, шаг следования импульсов обработки, расстояние перемещения, готовность обработки, лечение, прекращение обработки, сохранение отчета, распечатка отчета, отображение обработки и/или их комбинации.
[0105] В различных вариантах реализации подсистема 340 управляющего устройства содержит электронные аппаратные средства, которые механически сканируют преобразователь 280 для выполнения по меньшей мере одной функции. В одном из вариантов реализации по меньшей мере одна функция, которая может быть просканирована подсистемой 340 управляющего устройства, может содержать сканирование преобразователя 280 для визуализации, положение преобразователя 280 для визуализации, сканирование положения скольжения преобразователя 280 в местах обработки, управление настройками лечебного оборудования, выполнение других управляющих функций, взаимодействие со встроенным главным компьютером 330 и/или их комбинации. В одном из вариантов реализации места обработки являются дискретными. В одном из вариантов реализации места обработки перекрывают друг друга.
[0106] В различных вариантах реализации встроенный главный компьютер 330 находится в двухсторонней связи с управляющим устройством 340 и графическим интерфейсом 310. В одном из вариантов реализации данные из управляющего устройства 340 могут быть преобразованы в графический формат встроенным главным компьютером 330 и затем переданы графическому интерфейсу 310 для отображения на дисплее данных визуализации и/или обработки.
[0107] В одном из вариантов реализации команды могут быть введены пользователем с использованием графического интерфейса 310. Команды, введенные с использованием графического интерфейса 310, могут быть переданы встроенному главному компьютеру 330 и затем переданы управляющему устройству 340 для управления работой терапевтической подсистемы 320, подсистемы 350 визуализации, ручного зонда 100 и/или приемопередающего модуля 200. В различных вариантах реализации компьютер 330 может содержать процессор, память и/или программное обеспечение.
[0108] В различных вариантах реализации, при нажатии кнопки 150 визуализации CTS 20 входит в последовательность визуализации, в которой подсистема 350 визуализации захватывает линии сканирования, которые передаются компьютеру 330 для преобразования данных и/или графического преобразования, которое затем передается графическому интерфейсу 310. В то время как система работает в последовательности визуализации, кнопка 150 визуализации может быть нажата вновь, в результате чего CTS 20 переходит положение готовности. В аспекте этого варианта реализации для извещения пользователя о том, что CTS 20 находится в положении готовности, могут быть инициированы предупреждающие аудио- или видеоиндикаторы, такие как индикатор 155. В положении готовности подсистема 340 управляющего устройства связывается с компьютером 330 для получения введенных пользователем настроек обработки. Эти настройки обработки могут быть проверены и могут быть идентифицированы и преобразованы в параметр аппаратных средств в подсистеме 340 управляющего устройства. В одном из вариантов реализации такие заданные параметры аппаратных средств могут содержать синхронизацию обработки, модуляцию, время включенного состояния, время выключенного состояния, мощность усилителя RF, уровни напряжения, акустическую выходную мощность, частоту генератора, частоту преобразователя для обработки, шаг следования импульсов обработки, перемещение, скорость перемещающего механизма и/или их комбинации. CTS 20 может оставаться в положении готовности неопределенное время или может быть выключен после заданного периода времени.
[0109] В различных вариантах реализации настоящего изобретения, если CTS 20 находится в состоянии готовности, то может быть активирована кнопка 160 обработки. Эта активация кнопки 160 обработки начинает последовательность обработки. Последовательность обработки управляется терапевтической подсистемой 320, которая выполняет последовательность обработки наряду с подсистемой 340 управляющего устройства и независимо от компьютера 330. Последовательность обработки выполняется в режиме реального времени и продолжается в зависимости от длительности активации кнопки 160 обработки или запрограммированного времени, загруженного из компьютера 330 в подсистему 340 управляющего устройства и/или терапевтическую подсистему 320.
[0110] В различных вариантах реализации отличительные особенности, относящиеся к безопасности, могут быть использованы в CTS 20 для обеспечения безопасного использования, визуализации и обработки. В различных вариантах реализации компьютер 330 взаимодействует с портом 390 данных, который может обеспечивать одностороннюю или двухстороннюю связь между портом 390 данных и компьютером 330. Порт 390 данных может взаимодействовать с любым электронным запоминающим устройством, например порт 390 данных может взаимодействовать по меньшей мере с одним диском USB, компактным флэш-диском, защищенной цифровой картой, компакт-диском и т.п. В одном из вариантов реализации запоминающее устройство через порт 390 данных может загрузить в компьютер 330 отчеты об обработке или обновлении программного обеспечения. В другом аспекте этих вариантов реализации запоминающее устройство может представлять собой двухстороннюю связь через порт 390 данных с компьютером 330, так что протокол об обработке может быть загружен в компьютер 330 и CTS 20. Протокол об обработке может содержать параметры, данные о визуализации, данные об обработке, дату/время, длительность обработки, сопутствующую информацию, место обработки и их комбинации и т.п., которые могут быть переданы и/или загружены из компьютера 330 в запоминающее устройство через порт 390 данных. В одном из вариантов реализации в конце управляющего устройства может быть расположен второй порт данных (не показан). Второй порт данных может обеспечивать подачу питания и/или данные для принтера.
[0111] В различных вариантах реализации CTS 20 содержит замок 395. В одном из вариантов реализации для управления CTS 20 замок 395 должен быть отперт, так чтобы мог быть активирован переключатель 393 питания. В одном из вариантов реализации питание может оставаться включенным во время последовательного отпирания и запирания замка 395 и ввода различных параметров. Для отпирания замка 395 может быть необходим ключ 396 (не показан). Примеры ключей 396, подходящих для использования в настоящем изобретении, содержат стандартный металлический ключ с зубцами и пазами или электронный ключ. В некоторых вариантах реализации электронный ключ 396 может быть закодирован в цифровой форме для содержания информации и сбора данных о пользователе и/или времени использования CTS 20. В одном из вариантов реализации электронный ключ, который является, в частности, подходящим для использования с CTS 20, может быть диском USB с кодировкой, так что CTS 20 может быть активирован вставкой ключа-диска USB в замок 395. В различных вариантах реализации программный ключ может быть выполнен с возможностью указания состояния или статуса пользователя, блокирования системы, останова системы или с другими отличительными особенностями.
[0112] На фиг.9 показана структурная схема CTS 20 согласно различным вариантам реализации настоящего изобретения. В соответствии с аспектами этих вариантов реализации управляющее устройство 300 может содержать несколько электронных секций. Эти электронные секции могут включать источник 350 питания, который обеспечивает энергию для работы CTS 20, включая управляющее устройство 300, ручной зонд 100 и/или приемопередающий модуль 200. В одном из вариантов реализации источник 350 питания может подавать энергию для питания в принтер или другое устройство вывода данных. Управляющее устройство 300 может содержать подсистему 340 управляющего устройства, как описано здесь, главный компьютер 330, графический интерфейс 310, RF усилитель 352 и гибкую схему 345 передней панели. RF усилитель 352 может обеспечивать подачу энергии преобразователю 280. Встроенный главный компьютер 330 может быть главным компьютером, который может быть использован для приема введенных пользователем данных, передачи указанных данных подсистеме 340 управляющего устройства и для отображения изображений и состояния системы на графическом интерфейсе 310. Источник 350 питания может быть выполнен с возможностью использования в различных странах с различными системами электропитания и обычно является источником питания для использования в медицинском оборудовании. Источник питания может быть подключен через стандартную настенную розетку для получения энергии или может получать энергию от батареи или любого другого доступного дополнительного источника.
[0113] Графический интерфейс 310 отображает изображения и состояние системы, а также упрощает пользовательский интерфейс для ввода команд для управления CTS 20. Подсистема 340 управляющего устройства может управлять подсистемой 350 визуализации, терапевтической подсистемой 320, а также связью посредством интерфейса и передачей протокола обработки ручному зонду 100 и приемопередающему модулю 200, как описано здесь. В одном из вариантов реализации подсистема 340 управляющего устройства не только устанавливает параметры обработки, но также отслеживает состояние такого обработки и передает информацию об этом состоянии главному компьютеру 330 для отображения на дисплее 310 с сенсорным экраном. Гибкая схема 345 передней панели может быть кабелем, выполненным в форме печатной схемы, который соединяет управляющее устройство 300 с кабелем сопряжения 130. В одном из вариантов реализации кабель 130 может многоштырьковый соединитель, выполненный с возможностью быстрого соединения или разъединения с гибкой схемой 345 передней панели, как описано здесь. Кабель 130 обеспечивает связь управляющего устройства 300 с ручным зондом 100 и приемопередающим модулем 200, как описано выше.
[0114] Как показано на фиг.10, ручной зонд 100 содержит расположенную в рукоятке визуализирующую подсхему 110, кодер 420, датчик 425, переключатель 150 визуализации и переключатель 160 обработки, двигатель 402, индикатор 155 состояния и межблочный кабель и гибкий межблочный кабель 420. Ручной зонд 100 связан с кабелем 106, снабженным пружинными контактами, и соединителем 422, снабженным пружинными контактами, которые могут быть использованы в качестве аппаратного и программного интерфейсов и/или для передачи энергии между ручным зондом 100 и приемопередающим модулем 200.
[0115] В различных вариантах реализации настоящего изобретения приемопередающий модуль 200 может содержать идентификатор зонда и РСВ (печатный, плата с печатной схемой) соединитель 224. Идентификатор зонда и РСВ соединитель могут содержать фиксированное СППЗУ. Идентификатор зонда и РСВ соединитель 224 могут взаимодействовать с РСВ, расположенной в сухой части приемопередающего модуля 200, и взаимодействовать с преобразователем 280. Преобразователь 280 обычно расположен в жидкостной части приемопередающего модуля 200. В одном из вариантов реализации приемопередающий модуль 200 может быть соединен с ручным зондом 100 посредством кабеля 106 с пружинными контактами и соединителя 422 с пружинными контактами, который может быть 12-пиновым соединителем с пружинным контактами и для которого в ручном зонде 100 сформирована выемка. Кабель 106 с пружинными контактами с его 12-пиновым соединителем с пружинными контактами может быть соединен с идентификатором зонда и РСВ соединителем 224, который может содержать плакированные золотом контакты. В одном из вариантов реализации идентификатор зонда и РСВ соединитель 224 могут содержать регистратор использования, который запрещает использование приемопередающего модуля 200 после исчерпания заданного ресурса. В различных вариантах реализации заданный ресурс использования может варьироваться от одного цикла обработки до нескольких циклов обработки. В одном из вариантов реализации заданный ресурс использования может быть определен заданным временем включенного состояния преобразователя 280. В одном из вариантов реализации заданный ресурс использования ограничен одиночным циклом последовательности обработки. В этом аспекте, по существу, приемопередающий модуль 200 является одноразовым и подлежит утилизации после каждого использования. В одном из вариантов реализации система автоматически выключается или иным способом извещает пользователя о том, что приемопередающий модуль 200 должен быть заменен. Система может быть запрограммирована для выключения или указания иным способом на необходимость замены на основании по меньшей мере одного из следующего: время использования, переданная энергия, срок годности при хранении или их комбинации.
[0116] На фиг.10 показана блок-схема соединения ручного зонда 100 и приемопередающего модуля 200. Ручной зонд 100 может содержать защитный выключатель обработки, который обеспечивает электрическую изоляцию между блоками, реализующими функциями обработки и визуализации. Импульс преобразователя, сгенерированный подсистемой 340 управляющего устройства, может быть принят согласующей схемой 173. В одном из вариантов реализации для обработки без визуализации может быть использован одиночный преобразователь 280. В другом варианте реализации один преобразователь, действующий в двойном режиме, может быть использован для обработки и визуализации. В другом варианте реализации два преобразователя 280 могут быть использованы для обработки и визуализации. Еще в одном варианте реализации лечение осуществляют на относительно низких частотах (таких как, в одном варианте реализации, 4 МГц и 7 МГц номинально) посредством первого преобразователя 280, тогда как второй преобразователь, действующий на более высокой частоте (такой как, в одном варианте реализации, 18-40 МГц или выше), используют для визуализации.
[0117] Подсхемы 110 визуализации могут содержать усилитель с дифференциальной регулировкой коэффициента усиления и настраиваемый обходной фильтр, который может принимать эхо-сигнал, сформированный визуализирующей частью преобразователя 280. Управление визуализацией может быть осуществлено посредством переключателя 150 визуализации. Энергия может быть передана от управляющего устройства 300 через кабель 130. Указанная энергия может быть направлена подсхемам визуализации 110, переключателю 150 визуализации и переключателю 160 обработки. Указанная энергия также может быть передана шаговому двигателю 402, кодеру 425, переключателю 181 зонда 100, датчику 183 температуры ручного зонда и идентификационному СППЗУ 169 ручного зонда. Все электронные приборы, показанные на фиг.10, входящие в состав ручного зонда 100, могут быть установлены на монтажной плате, соединенной с интерфейсом кабеля 130 и/или интерфейсом приемопередающего модуля 200.
[0118] Приемопередающий модуль 200 содержит интерфейс, соединенный с ручным зондом 100, как описано на фиг.9. Приемопередающий модуль 200 может содержать запоминающее устройство 249 любого типа. В одном из вариантов реализации запоминающее устройство 249 является частью электрической интерфейсной согласующей монтажной платы 224 и электрической согласующей монтажной платы 243. В одном из вариантов реализации запоминающее устройство 249 является постоянным запоминающим устройством. В одном из вариантов реализации запоминающее устройство 249 является энергонезависимым элементом. В одном из вариантов реализации запоминающее устройство 249 является СППЗУ. В одном из вариантов реализации запоминающее устройство 249 является защищенным СППЗУ. В одном из вариантов реализации РСВ преобразователь может содержать данные о калибровке и информацию, сохраненную в защищенном СППЗУ. Далее в этом аспекте приемопередающий модуль 200 содержит датчик, который измеряет температуру текучей среды в приемопередающем модуле 200, согласующую схему 243, взаимодействующую с лечебной частью преобразователя 280. В различных вариантах реализации запоминающее устройство 249 может содержать цифровую информацию, относящуюся к безопасности, дату изготовления, глубину фокуса преобразователя, требования к мощности преобразователя и т.п. В одном из вариантов реализации запоминающее устройство 249 может содержать таймер, который деактивирует приемопередающий модуль 200 во время использования с CTS 20 после истечения предварительно заданного срока годности. Приемопередающий модуль 200 может содержать кодер 283 положения, такой как магнит, соединенный с преобразователем 280, и датчик 241, такой как датчик Холла, соединенный со стационарным корпусом 220 излучателя/приемника через монтажную плату. Кодер 283 положения и датчик 241 положения могут действовать в качестве датчика для определения начального положения и/или перемещения преобразователя 280, как описано здесь. Визуализирующая часть преобразователя 280 может принимать RF сигнал преобразователя от управляющего устройства 300.
[0119] Ввиду потенциальной опасности касания пользователем контактов соединителя 422 с пружинными контактами, когда приемопередающий модуль 200 не присоединен, электрический ток должен быть выключен в этой ситуации для обеспечения безопасности пользователя. Для обеспечения такой безопасности контактные штыри соединителя 422 на противоположных концах кабеля 106 могут быть использованы для обнаружения соединения приемопередающего модуля 200 с ручным зондом 100. Как описано выше, перемещающий механизм 400 может быть соединен с преобразователем 280 для обеспечения линейного перемещения преобразователя вдоль пути перемещения 272.
[0120] В различных вариантах реализации CTS 20 может содержать различные отличительные особенности, относящиеся к безопасности, для обеспечения безопасной среды для пользователя и/или субъекта, которого лечат. В одном из вариантов реализации CTS 20 может содержать по меньшей мере одно из следующего: данные о калибровке, о безопасной рабочей области, об обнаружении значительного несоответствия, об обнаружении большого электрического тока, об отслеживании напряжения питания усилителя RF, об отслеживании прямой и обратной электроэнергии, об обнаружении акустического соединения, об акустическом полном соединении, об обнаружении положения обработки и их комбинации.
[0121] Например, данные о калибровке могут содержать некоторые характеристики, относящиеся к данному приемопередающему модулю 200, которые постоянно присутствуют в запоминающем устройстве 249. Такие характеристики могут содержать, помимо прочего, уникальные и отслеживаемые серийные номера, идентификацию зонда, регулировку частоты, таблицу соответствия акустической мощности и напряжения, таблицу соответствия электроэнергии и напряжения, уровни максимальные мощности, коды даты, наработку, другую информацию и/или их комбинации. Например, функция обеспечения безопасности рабочей области ограничивает выход энергии в данном приемопередающем модуле 200 безопасной рабочей областью. Такое ограничение для данного приемопередающего модуля 200 может относиться к уровню акустический мощности, напряжению, обеспеченному источником питания, и времени включенного состояния, которое может быть ограничено аппаратными и/или программными средствами управляющего устройства 300 и/или приемопередающего модуля 200.
[0122] Пример отличительной особенности, предназначенной для обнаружения значительного несоответствия, может включать ситуацию ошибки, когда мощность, отраженная от нагрузки приемопередающего модуля 200, превышает прямую направленную мощность, так что возникает отказ приемопередающего модуля 200, когда образуется незамкнутый контур или при большой отраженной энергии, и в этом случае автоматическое и безусловное отключение системы будет вызвано схемой компаратора, которая блокирует аппаратные средства управляющего устройства 300 и отображением на сенсорном экране дисплея 310 уведомляет пользователя о такой ошибке. Пример отличительной особенности, предназначенной для обнаружения чрезмерного электрического тока, может включать ситуацию, когда случается отказ усилителя или отказ нагрузки, так что обнаруживается большой электрический ток, такой, как в случае, например, короткого замыкания или отказа электрического компонента, и в этом случае автоматически и безусловно вызывается состояние останова, которое блокирует аппаратные средства управляющего устройства 300, и уведомление об этой ситуации будет отображено для пользователя на экране дисплея 310.
[0123] Пример отличительной особенности безопасности, относящейся к отслеживанию напряжения питания RF усилителя, может включать измерение системой CTS 20 заданного выходного напряжения источника питания для RF усилителя перед обработкой, в течение и после обработки для обеспечения правильного уровня напряжения. Если определено, что указанное напряжение не соответствует правильному уровню, то автоматически и безусловно вызывается состояние останова, и на экране 310 отображается для пользователя соответствующее уведомление. Пример отличительной особенности, относящейся к безопасности, содержит отслеживание перемещения шагового двигателя 402 во время обработки и определение, находится ли это перемещение в допустимом диапазоне, так что преобразователь 280 должным образом проходит вдоль пути перемещение 272 с предварительно заданной скорости или частотой. Если определено, что шаговый двигатель 402 не находится в ожидаемом положении, то на экране дисплея отображается уведомление, предупреждающее пользователя.
[0124] Пример отличительной особенности относительно безопасности акустического контакта включает последовательность визуализации, которая указывает пользователю, что приемопередающий модуль 200 акустически взаимодействует с поверхностью 501, перед лечением и после обработки. Последовательность визуализации подтверждает, что преобразователь 280 действительно сканирует область обработки.
[0125] Другие дополнительные отличительные особенности, относящиеся к безопасности, могут включать такие особенности, как отслеживание температуры, использование концевого выключателя, датчика зонда или их комбинации. Пример отслеживания температуры может содержать отслеживание температуры жидкостной части приемопередающего модуля 200, отслеживание температуры ручного зонда 100, отслеживание температуры управляющего устройства 300, отслеживание температуры подсистемы 340 управляющего устройства и/или отслеживание температуры RF усилителя 352. Такое отслеживание температуры обеспечивает работу описанных устройств в допустимых температурных границах и уведомляет пользователя, если температура выходит за пределы допустимого диапазона.
[0126] Концевой выключатель может быть включен в состав CTS 20, так что если пользователь нажимает концевой выключатель, система переходит в безопасное и неактивное состояние после активации концевого выключателя. Пример безопасности при отказе, зарегистрированном датчиком зонда, может включать немедленную остановку визуализации и/или обработки, если приемопередающий модуль 200 отсоединится от ручного зонда 100 во время использования. В одном из вариантов реализации CTS 20 может содержать средство системной диагностики, которое может содержать программную проверку ошибок, неожиданных событий и использования. Системная диагностика также может содержать индикатор обслуживания, который отслеживает использование CTS 20 и уведомляет пользователя о том, что система нуждается в обслуживании. В состав CTS 20 могут входить другие относящиеся к безопасности отличительные особенности, известные из уровня техники, такие как плавкие предохранители, источник питания для системы, оснащенный защитой по напряжению и ограничением электрического тока, а также стандартизованные защиты, такие как класс пожарной безопасности, класс электробезопасности, соответствие с ISO/EN 60601 и т.п.
[0127] В различных вариантах реализации система CTS 20 содержит сменный преобразующий модуль 200, соединенный с корпусом ручного зонда 100, имеющим по меньшей мере одну управляющую кнопку (150 и/или 160), так что преобразующий модуль 200 и управляющая кнопка (150 и/или 160) могут быть задействованы лишь одной рукой. В аспекте вариантов реализации преобразующий модуль 200 обеспечивает ультразвуковую энергию для функции визуализации и/или функции обработки. В другом аспекте вариантов реализации устройство содержит управляющее устройство 300, соединенное с переносным корпусом ручного зонда 100 и взаимодействующее с модулем 200 преобразователя. В дополнительном аспекте этих вариантов реализации управляющее устройство 300 управляет ультразвуковой энергией и принимает сигнал от преобразующего модуля 200. Управляющее устройство 300 может иметь источник питания, обеспечивающий питание для ультразвуковой энергии. Еще в одном аспекте вариантов реализации устройство используется для эстетической визуализации и обработки на лбу субъекта.
[0128] На фиг.11 показан схематический чертеж представляющих интерес анатомических отличительных особенностей на голове и в области лица субъекта 500, включая тройничный нерв 502, лицевой нерв 504, околоушную железу 506 и лицевую артерию 508. В одном из вариантов реализации анатомическими отличительными особенностями, представляющими интерес, являются области, которые должны быть обработаны с осторожностью или должны быть отмечены, обработаны с осторожностью или даже исключены из области обработки. На фиг.12-14 показана одна из интересующих областей 65 (далее - ROI 65) и поперечная части 10 ткани вдоль линии 23-23 в области ROI 65 у субъекта 500, т.е. область, которая используется, например, при выполнении подъема бровей. Эта поперечная часть 10 ткани может быть расположена в области ROI 65 и может проходить в любом направлении или иметь любую длину в области ROI 65. Разумеется, субъект 500 может нуждаться в обработке с подъемом брови (с подтяжкой кожи лба). Поперечная часть 10 ткани содержит поверхность 501 в кожном слое 503, жировой слой 505, поверхностную мышечную апоневротическую систему 507 (далее - SMAS 507) и слой 509 мимических мышц. Комбинация этих слоев в целом известна как подкожная ткань 510. На фиг.14 также показана область 525 обработки, которая расположена ниже поверхности 501. В одном из вариантов реализации поверхность 501 может быть поверхностью кожи субъекта 500. Хотя термин мимическая мышца может быть использован здесь в качестве примера, предложенное устройство может быть применено к любой ткани тела. В различных вариантах реализации предложенные устройство и/или способы могут быть использованы для мышц (или другой ткани) лица, шеи, головы, плеч, ног или любого другого участка тела.
[0129] Ткань мимической мышцы способна к сокращению и расширению. Скелетная мышца представляет собой фиброзную ткань, предназначенную для формирования сжатия и растяжения. Например, скелетные мышцы в области лба могут формировать складки и морщины. В области бровей или лба существуют некоторые мимические мышцы, включая надчерепную мышцу, мышцу, вызывающую сморщивание кожи, и так называемую мышцу гордецов. Эти мимические мышцы отвечают за перемещение кожи лба и различные выражения лица. Помимо мимических мышц в области лба существуют другие ткани, которые также могут вызывать появление морщин.
[0130] В соответствии с одним из вариантов реализации настоящего изобретения предложены способы ультразвукового косметической обработки ткани с использованием одной косметической лечебной системы. Ультразвуковая энергия может быть сфокусированной, несфокусированной или расфокусированной и применена к области ROI 65, содержащей одну из тканей мимической мышцы или кожных слоев или фасции, для достижения терапевтического эффекта, такого как натяжение кожи лба у субъекта 500.
[0131] В различных вариантах реализации некоторые косметические процедуры, которые традиционно выполняются с использованием инвазивных способов, достигаются нацеливанием энергии, такой как ультразвуковая энергия, на заданные подкожные ткани 510. В одном из вариантов реализации предложены способы неинвазивного обработки подкожных тканей 510 для выполнения натяжения кожи лба. В одном из вариантов реализации бесконтактное натяжение кожи лба осуществляют применением ультразвуковой энергии на заданных глубинах 278 вдоль лба для аблятивного сокращения, вызывающего повторное абсорбирование ткани в тело, для коагуляции, удаления, манипуляции или парализования подкожной ткани 510, такой как мимическая мышца 509, например мышца, вызывающая сморщивание кожи, надчерепная мышца, и так называемая мышца гордецов, в коже лба для уменьшения морщин.
[0132] В некоторых вариантах реализации ультразвуковую энергию применяют в области ROI 65 вдоль лба субъекта. Ультразвуковая энергия может быть применена на заданных глубинах и может быть нацелена на некоторые подкожные ткани в коже лба, как показано на фиг.12-14, SMAS 507 и/или на мимическую мышцу 509. Ультразвуковая энергия воздействует на эти ткани и вырезает, ампутирует, коагулирует, микроампутирует указанные ткани, управляет ими и/или вызывает повторную абсорбцию подкожной ткани 510 в тело субъекта, в результате чего происходит неинвазивное натяжение кожи лба.
[0133] Например, мышца, вызывающая сморщивание кожи в целевой области 525, может быть подвержена воздействию и обработке применением ультразвуковой энергии на заданных глубинах 278. Эта мимическая мышца 509 или другие подкожные мимические мышцы могут быть ампутированы, коагулированы, микроампутированы, подвержены изменению формы или подвержены управлению с использованием ультразвуковой энергии бесконтактным способом. В частности, вместо разреза мышцы, вызывающей сморщивание кожи, при классическом или эндоскопическом натяжении кожи лба, целевая мышца 509, такая как мышца, вызывающая сморщивание кожи, может быть ампутирована, микроампутирована или коагулирована с использованием ультразвуковой энергии в области лба без необходимости применения традиционных инвазивных способов.
[0134] Согласно одному из способов выполняют целенаправленное лечение подкожной ткани 510 в области 65 лба, например, с использованием одной лишь терапии, терапии и отслеживания, визуализации и терапии или терапии, визуализации и отслеживания. Целенаправленная терапия ткани может быть осуществлена с использованием ультразвуковой энергии, доставленной на необходимые глубины 278 и в необходимые области с использованием различных пространственных и временных параметров энергии. В одном из вариантов реализации ткани, представляющие интерес, просматриваются в движении в режиме реального времени с использованием ультразвуковой визуализации для ясного рассмотрения движущейся ткани для облегчения нацеливания и обработки области ROI 65 на лбу субъекта. Таким образом, практикующий врач или пользователь, выполняющий бесконтактное натяжение кожи лба, могут визуально наблюдать перемещение и изменение, происходящие в подкожной ткани 510 во время обработки.
[0135] На фиг.15-17 показан вариант осуществления способа управления натяжением кожи лба. Другие варианты реализации содержат несколько глубин обработки, объемное (3D) лечение и использование ряда процедур обработки в течение длительного времени. Система CTS 20 может быть приведена во взаимодействие с частью ткани 10 в области ROI 65, которая должна быть обработана. В одном из вариантов реализации область 525 обработки сначала визуализируют и затем выполняют ее лечение. В одном из вариантов реализации пользователь активирует кнопку 150 визуализации для инициации последовательности визуализации. Визуализация может быть отображена на графическом интерфейсе 310. В одном из вариантов реализации последовательностью визуализации можно управлять с использованием сенсорного экрана 315, который является частью графического интерфейса 310. После начала последовательности визуализации последовательность обработки может быть инициирована в любое время. Пользователь может активировать кнопку 160 обработки в любое время для инициации последовательности обработки. Лечение и визуализация могут осуществляться одновременно или последовательно. Например, пользователь может поочередно визуализировать, обрабатывать, визуализировать, обрабатывать и т.д. Как схематично проиллюстрировано на фиг.15, последовательность обработки активирует лечебную часть преобразователя 280 для создания полости или области 550 воздействия ниже поверхности 105. Следует отметить, что на фиг.15 проиллюстрирован один вариант реализации для глубины 278, которая соответствует глубине расположения мышцы. В различных вариантах реализации глубина 278 может соответствовать любой ткани, слою ткани, кожи, дермы, жировому слою, SMAS, мышечному слою или другой ткани. Следует отметить, что, как показано на чертеже, энергия 50 представлена исключительно в целях иллюстрации. На некоторых чертежах, включая фиг.15-17, энергия 50 показана излученной по всей длине корпуса преобразователя (через все его отверстия в соответствии с расстоянием перемещения 272); однако фактически энергия излучается лишь из части этой длины, например фактической длины преобразующего элемента преобразователя 280. В одном из вариантов реализации преобразующий элемент преобразователя 280 сканирует с линейным перемещением для охвата интересующей области, так что в любой момент времени энергия не излучается одновременно из всей длины корпуса преобразователя.
[0136] В одном из вариантов реализации система CTS 20 генерирует ультразвуковую энергию, которая направлена и сфокусирована ниже поверхности 501. Эта управляемая и сфокусированная ультразвуковая энергия создает область 550 воздействия, которая может быть областью или полостью тепловой коагуляции в подкожной ткани 510. В одном из вариантов реализации излученная энергия 50 поднимает температуру ткани на указанной глубине 278 ниже поверхности 501. Температура ткани может быть поднята от примерно 1°С до примерно 100°С выше температуры ткани или от примерно 5°С до примерно 60°С выше температуры ткани, или выше 10°С до примерно 50°С выше температуры ткани. В некоторых вариантах реализации излученная энергия 50 нацелена на ткань ниже поверхности 501, которую вырезает, ампутирует, коагулирует, микроампутирует, или которой управляет, и/или формирует область 550 воздействия в части 10 ткани ниже поверхности 501 на указанной глубине 278. В одном из вариантов реализации во время последовательности обработки преобразователь 280 перемещается в направление, обозначенном стрелкой 290, в указанных интервалах 295 для создания последовательности областей 254 обработки, каждая из которых принимает излученную энергию 50 для создания области 550 воздействия. Например, излученная энергия 50 создает последовательность областей 550 воздействия в слое 509 мимической мышцы, расположенной в части 10 ткани.
[0137] В различных вариантах реализации доставка излученной энергии 50 на подходящую глубину 278, распределение, синхронизация и уровень энергии обеспечиваются приемопередающим модулем 200 путем выполнения управляемой операции системой 300 управления для достижения необходимого терапевтического эффекта вследствие управляемого теплового воздействия для обработки по меньшей мере одного из слоя 503 дермы, жирового слоя 505, слоя SMAS 507 и слоя 509 мимической мышцы. Во время операции приемопередающий модуль 200 и/или преобразователь 280 также может механически и/или электронным способом перемещаться вдоль поверхности 501 для обработки расширенной области. Дополнительно пространственное управление глубиной обработки 278 может быть соответственно отрегулированным в различных диапазонах, таких как между широким диапазоном от примерно 0 мм до примерно 25 мм, соответственно фиксированным на нескольких дискретных глубинах, с регулировкой, ограниченной узким диапазоном, например, примерно от 3 мм до примерно 9 мм, и/или с динамической регулировкой во время обработки, для обработки по меньшей мере одного из слоя 503 дермы, жирового слоя 505, слоя SMAS 507 и слоя 509 мимической мышцы. Перед доставкой, во время и после доставки ультразвуковой энергии 50 по меньшей мере к одному из слоя 503 дермы, жирового слоя 505, слоя SMAS 507 и слоя 509 мимической мышцы может быть обеспечено отслеживание области обработки и окружающих структур для планирования и оценки результатов и/или обеспечения обратной связи с управляющим устройством 300 и пользователем посредством графического интерфейса 310.
[0138] Относительно обработки слоя SMAS 507 и подобной фасции (мышечной оболочки, соединительной ткани) соединительная ткань может постоянно сжиматься при тепловой обработке до температур примерно 60°С или выше. После абляции коллагеновые волокна немедленно сокращаются примерно на 30% своей длины. Сокращенные волокна могут сформировать натяжение ткани, причем сокращение должно происходить вдоль доминирующего направления коллагеновых волокон. По всему телу коллагеновые волокна пролегают в соединительных тканях вдоль линий хронического сжатия (растяжения). На старом лице коллагеновые волокна в области SMAS 507 в основном ориентированы вдоль линий гравитационного растяжения. Сокращение этих волокон приводит к натяжению SMAS 507 в направлении, подходящем для коррекции ослабления и провисания вследствие старения. Лечение содержит ампутацию заданных областей SMAS 507 и подобных отвисших соединительных тканей.
[0139] Кроме того, слой SMAS 507 варьируется по глубине и толщине в различных местах, например, от примерно 0,5 мм до примерно 5 мм или больше. На лице под областями SMAS 507 или рядом с ними присутствуют важные структуры, такие как нервы, околоушная железа, артерии и вены. С использованием CTS 20 может быть осуществлена обработка путем ограниченного нагрева слоев областей SMAS 507 или другой отвисшей подкожной ткани 510 при температурах от примерно 60°С до примерно 90°С без значительного повреждения пролегающих выше, ниже, в стороне или рядом тканей, а также точная доставка терапевтической энергии к слою SMAS 507 и получение обратной связи от интересующей области перед лечением, во время и после обработки.
[0140] В различных вариантах реализации предложен способ осуществления натяжения кожи лба субъекта. В некоторых вариантах реализации согласно предложенному способу зонд 200 вводят во взаимодействие с областью 65 лба субъекта 60 и визуализируют по меньшей мере часть подкожной ткани 510 в области лба для определения целевую область в подкожной ткани 510. В аспекте варианта реализации согласно предложенному способу применяют ультразвуковую энергию 50 к целевой области 525 в подкожной ткани 510 для ампутации подкожной ткани 510 в целевой области 525, в результате чего вызывают натяжение кожного слоя 503, пролегающего выше подкожной ткани 510 в области 65 лба.
[0141] В различных вариантах реализации предложен способ сокращения части кожного слоя 503 на лицевой области субъекта 60. В некоторых вариантах реализации согласно предложенному способу вставляют преобразующий модуль 200 в ручное управляющее устройство 100 и затем вводят преобразующий модуль 200 во взаимодействие с лицевой области субъекта 60. В одном из вариантов реализации согласно предложенному способу активируют первый переключатель 150 на ручном зонде 100 для инициации последовательности визуализации части ткани 10, пролегающей ниже кожного слоя 503, затем собирают данные последовательности визуализации. В этом варианте реализации согласно предложенному способу вычисляют последовательность обработки на основании собранных данных и активизируют второй переключатель 160 на ручном управляющем устройстве 100 для инициации последовательности обработки. В аспекте вариантов реализации предложенный способ может быть подходящим для использования на части лица, головы, шеи и/или другой части тела субъекта 60.
[0142] Как показано на фиг.16, после создания под действием излученной энергии областей 550 воздействия начинают лечение и/или натяжение части ткани 10. В одном из вариантов реализации согласно предложенному способу обрабатывают полость или область 550 воздействия в слое мимической мышцы 509 в части ткани 10. Например, слой 509 мимической мышцы совершает перемещение 560 вокруг области 550 воздействия и сокращает указанную область. В конечном счете тело, по существу, устраняет область 550 воздействия путем рассасывания и способствует росту ткани. Это перемещение 560 вызывает перемещение 570 верхних уровней, таких как SMAS 507, над которыми была расположена область 550 воздействия. Это в свою очередь вызывает перемещение 580 в поверхности 501, в результате чего поверхность 501 сокращается. Указанное поверхностное перемещение 580 поверхности 501 является целью любого натяжения кожи лба.
Поверхностное перемещение 580 создает эффект натяжения поверхности 501 кожи, в результате чего может быть обеспечен омоложенный внешний вид субъекта 500. В различных вариантах реализации при взаимодействии CTS 20 с частью ткани 10 может быть применен медикамент. Этот медикамент может быть активирован в целевой области 525 посредством излученной энергии 50 и может способствовать облегчению, ускорению и/или лечению полости или области 550 воздействия во время рассасывания и/или заживления полости или области 550 воздействия. Медикаменты могут содержать, помимо прочего, гиалуроновую кислоту, ретинол, витамины (например, витамин С), минералы (например, медь) и другие соединения или фармацевтические препараты, которые могут быть активированы излученной энергией и/или принести пользу при их более глубоком проникновении в кожу.
[0143] На фиг.18 показана блок-схема, иллюстрирующая способ согласно различным вариантам реализации настоящего изобретения. Способ 800 может содержать первый этап 801, на котором вводят зонд во взаимодействие с областью лба. Например, на этапе 801 вводят приемопередающий модуль 200 во взаимодействие с частью ткани 10 в области ROI 65 субъекта 500. На этапе 801 между приемопередающим модулем 200 и частью ткани 10 может быть нанесен гель, который облегчает взаимодействие зонда с областью лба. От этапа 801 переходят к этапу 802, на котором визуализируют подкожную ткань 510 в области лба. На этапе 802 визуализируют часть ткани 10 с использованием CTS 20, как описано здесь. Кроме того, между этапами 801 и 802 может быть включен этап 810. На этапе 810 применяют медикамент к области лба. Указанный медикамент может быть любым веществом или материалом, который содержит активный ингредиент, способствующий натяжению поверхности 501 и/или заживлению и/или рассасыванию полости или области 550 воздействия в части ткани 10, пролегающей ниже поверхности 501. В одном из вариантов реализации медикамент также может действовать в качестве соединительного геля, подходящего для использования на этапе 801. От этапа 802 переходят к этапу 803, на котором определяют целевую область 525. На этапе 803 просматривают изображение, которое было создано на этапе 802, для определения целевой области 525.
[0144] От этапа 803 переходят к этапу 804, на котором применяют энергию к целевой области 525. Например, этап 804 может быть проиллюстрирован, например, на фиг.15. Следует отметить, что на фиг.15 проиллюстрирован один вариант реализации для глубины 278, которая соответствует глубине пролегания мышцы. В различных вариантах реализации глубина 278 может соответствовать любой ткани, слою ткани, кожи, дермы, жировому слою, SMAS, мышечному слою или другой ткани. От этапа 804 переходят к этапу 805, на котором ампутируют ткань в целевой области 525. В различных вариантах реализации указанная "ампутация" может быть коагуляцией вместо ампутации. Ампутация представляет собой более или менее мгновенное физическое удаление, схожее с сублимацией или испарением, в то время как тепловая коагуляция представляет собой более умеренную по эффективности операцию, поскольку она убивает ткань, но оставляет ее на месте. Этап 805 проиллюстрирован в на фиг.15. Следует отметить, что на фиг.15 проиллюстрирован один из вариантов реализации для глубины 278, которая соответствует глубине пролегания мышцы. В различных вариантах реализации глубина 278 может соответствовать любой ткани, слою ткани, кожи, дермы, жировому слою, SMAS, мышечному слою или другой ткани. На этапе 805 в части ткани 10 ниже поверхности 501 создают полость или область 550 воздействия. От этапа 805 переходят к этапу 806, на котором сокращают кожный слой 503 выше или ниже обработанной ткани. В проиллюстрированном варианте реализации на этапе 806 просто сокращают кожный слой, пролегающий выше обработанной ткани, но в различных вариантах реализации описанный этап может быть расширен. Этап 806 проиллюстрирован на фиг.17. Например, одна из поверхностей 501 в кожном слое 503 сжимается из-за рассасывания или обработки полости или области воздействия 505. Между этапами 505 и 506 может быть включен дополнительный этап 812. Как правило, при включении этапа 812 также должен использоваться дополнительный этап 810. На этапе 812 активируют медикамент в целевой области 525. Эта активация медикамента может обеспечить возможность способствования активным ингредиентом натяжению кожного слоя 503 выше ампутированной ткани. Например, активный ингредиент может способствовать заживлению или рассасыванию полости или области 550 воздействия. В другом примере медикамент может быть активирован в поверхности 501 или в кожном слое 503 для способствования натяжению.
[0145] На фиг.19 проиллюстрирован способ 900 согласно различным вариантам реализации настоящего изобретения. Способ 900 начинается вставкой преобразующего модуля в ручное управляющее устройство. Например, согласно способу 900 вставляют приемопередающий модуль 200 в ручной зонд 100. От этапа 901 переходят к этапу 902, на котором модуль вводят во взаимодействие с областью лица субъекта. Например, на этапе 902 могут вводить приемопередающий модуль 200 во взаимодействие с интересующей областью 65 субъекта 63. От этапа 902 переходят к этапу 903, на котором активируют первый переключатель на ручном управляющем устройстве. Например, на этапе 903 активируют кнопку 150 визуализации на ручном зонде 100. От этапа 903 переходят к этапу 904, на котором инициируют последовательность визуализации. Например, на этапе 904 могут осуществлять последовательность визуализации с использованием системы CTS 20, как описано здесь. От этапа 904 переходят к этапу 905, на котором собирают визуализированные данные. От этапа 905 переходят к этапу 906, на котором вычисляют последовательность обработки. В различных вариантах реализации при "вычислении", которое выполняют на этапе 906, могут определять, выбирать, выбирать предварительно заданную последовательность обработки и/или выбирать подходящую последовательность обработки. Например, на этапе 906 могут из управляющего устройства 300 загружать последовательность обработки в ручной зонд 100 и приемопередающий модуль 200. От этапа 906 переходят к этапу 907, на котором активируют второй переключатель на ручном управляющем устройстве. Например, на этапе 907 активируют кнопку 160 обработки на ручном зонде 100. От этапа 907 переходят к этапу 908, на котором выполняют последовательность обработки. Например, на этапе 908 могут выполнять любую последовательность обработки, описанную здесь. В других вариантах реализации проиллюстрированный способ может быть расширен и может включать обобщенную активизацию переключателей, которые могут быть размещены в любом месте и могут быть любой конструкции, такие как ножные переключатели или выключатели на управляющем устройстве 300, в различных неограничивающих вариантах реализации.
[0146] На фиг.20-21 показаны вид спереди и вид сбоку одного из вариантов выполнения управляющего устройства 300, как описано выше. На фиг.22 показан один из вариантов реализации интерактивного графического дисплея 310, который может содержать монитор с сенсорным экраном и графический пользовательский интерфейс (GUI), который обеспечивает возможность взаимодействия пользователя с CTS 20. На фиг.22 показан общий пример варианта выполнения интерактивного графического дисплея 310, который может содержать кнопки 1000 системных функций, средства 1010 управления лечением, средства 1020 управления визуализацией, средство 1030 управления областью, общий счетчик 1040 циклов обработки субъекта, счетчик 1050 циклов обработки субъекта по областям, индикатор 1060 состояния системы, область 1070 отображения информации о зонде, область 1080 отображения информации о заголовке и/или область 1090 изображения - обработанного участка.
[0147] Таблички 1000 с названием системных функций отображают аспекты системной функции. В одном из вариантов реализации интерактивный графический дисплей 310 имеет по меньшей мере одну общую функцию. В различных вариантах реализации интерактивный графический дисплей 310 имеет по меньшей мере две общие функции. В одном из вариантов реализации интерактивный графический дисплей 310 имеет три общие функции: функцию планирования, функцию визуализации/обработки и функцию параметров настройки. В одном из вариантов реализации функция планирования содержит средства управления и информацию, необходимую для планирования обработки, которые могут автоматически задавать управление лечением. В одном из вариантов реализации функция планирования может отображать краткий обзор различных областей обработки с рекомендуемыми параметрами обработки для каждой области. Например, параметры для обработки областей, таких как лоб, левый или правый виски, левая или правая предушные области, левая или правая сторона шеи, подбородок и левая или правая щека, могут показывать распечатку рекомендуемых уровней энергии для приемопередающего модуля 200 и рекомендуемые количества циклов обработки. Некоторые области могут отображать распечатку протоколов для выбора протокола обработки, протокол со списком разрешенных для обработки областей и запрещенных для обработки областей, которые не могут быть выбраны по причине неподходящего преобразователя, параметры которого выходят за допустимые пределы. В одном из вариантов реализации функция визуализации/обработки содержит информацию о средствах управления и протоколе, необходимую для визуализации мягкой ткани и для соответствующей обработки мягкой ткани. В различных вариантах реализации стартовый экран может содержать данные о субъекте и/или об установке. В одном из вариантов реализации функция визуализации/обработки может содержать основную экранную заставку. В одном из вариантов реализации функция визуализации/обработки может быть предназначена для лобной части. Функция параметров настройки предоставляет пользователю возможность ввода данных, отслеживания, сохранения и/или распечатки информации об обработке субъекта независимо от функции сканирования, и может содержать такую информацию, как информация о субъекте и установке, об окончании обработки, отчеты об обработке, изображения, подсказку, объем и средства управления и диалоги, относящиеся к завершению работы системы.
[0148] Средства 1010 управления обработкой могут задавать уровень акустической энергии, шаг для задания расстояния между микрокоагуляционными областями и максимальное расстояние линии обработки и подобные параметры.
[0149] Средства 1020 управления визуализацией могут содержать указатель (не сканирующий), окно (сканирующее), а также информацию о визуализации и сканировании. Указатель может содержать иконку расстояния для отображения измеренных расстояний и поясняющего текста. Окно может увеличивать или уменьшать яркость, или другое окно, относящееся к характеристикам. Иконка изображения может переключать масштаб обработки или сохранять изображение. Кнопки управления сканированием могут запускать или останавливать сканирование для визуализации цели и отображения подобной информации.
[0150] Средство 1030 управления областью запускает диалог под изображением для выбора области ткани. Общий счетчик 1040 циклов обработки субъекта отслеживает накопленное количество выполненных циклов обработки и тому подобную информацию. Счетчик 1050 циклов обработки субъекта по областям указывает область обработки, такую как область лба или подбородка, и т.д. и может отображать циклы, выполненные в этой области или протокол для рекомендуемых циклов и тому подобную информацию. Индикатор 1060 состояния системы может отображать готовность системы, обработку или другие относящиеся к этому режиму системные сообщения и тому подобную информацию. Область 1070 отображения информации о зонде может отображать название присоединенного преобразователя, глубину обработки преобразователя и количество выполненных циклов/общий ресурс преобразователя в циклах и тому подобную информацию. Область 1080 отображения информации о заголовке может содержать модель установки, имя клинического врача, имя субъекта и его идентификацию, дату и время и тому подобную информацию. Область 1090 изображения обработанного участка может содержать ультразвуковое изображение, горизонтальную и вертикальную (по глубине) шкалы с делениями через 1 мм или другими единицами измерения, шкалу обработки, обозначающую шаг, длину и глубину обработки, и другую тому подобную информацию.
[0151] Одно из преимуществ использования лечебной системы, которая также обеспечивает возможность визуализации, состоит в том, что пользователь может убедиться в достаточно плотном контакте между преобразователем и кожей (таком как с применением соединительного геля между приемопередающим модулем 200 и кожей) и отсутствии темных вертикальных полос, характерных для воздушных полостей между рабочей поверхностью преобразователя и субъектом. Недостаточно плотный контакт может привести к некачественной обработке области. Корректирующим действием может быть размещение большего количества геля в области ультразвукового взаимодействия для обеспечения достаточного контакта и связи между устройством и субъектом.
[0152] Терапевтическая обработка может быть инициирована нажатием кнопки 160 обработки на ручном зонде 100. В одном из вариантов реализации индикатор 155 светится желтым цветом для указания, что система находится в состоянии "обработки". Во время излучения энергии 50 звучит непрерывный тон, и желтая линия "обработки" продвигается вдоль зеленой линии "готовности" обработки на экране. Для доставки следующей порции энергии в ту же область обработки пользователь может перемещать преобразователь примерно на 1-6 мм или примерно на 2-3 мм (в зависимости от обработки, области и т.д.) к соседней ткани и вновь нажимать кнопку 160 обработки. В различных вариантах реализации между подачей предыдущей порции энергии 50 может проходить некоторый период времени. В различных вариантах реализации указанный период времени может составлять 1 с, 5 с, 10 с или иметь любую другую длительность. В одном из вариантов реализации, если между подачей предыдущей порции энергии 50 прошел интервал длительностью пять или десять секунд (или имеющий некоторую другую длительность), пользователь может нажать кнопку 150 визуализации на ручном зонде 100 для восстановления состояния "готовности" и затем следом нажать кнопку 160 обработки. Обработка может быть продолжена таким образом, пока не будет доставлено рекомендуемое количество порций энергии (как показано в центре нижней части экрана). В одном из вариантов реализации, если доставлено правильное количество порций энергии, цвет индикатора количества изменится от оранжевого к белому.
[0153] В одном из вариантов реализации функция параметров настройки предоставляет пользователю возможность экспорта изображений. Сохраненные изображения перечислены в нижнем диалоговом окне, и последнее выбранное пользователем изображение отображается в верхней части окна. Если подключено внешнее запоминающее устройство и/или принтер, то могут быть осуществлены экспорт графического файла и/или его распечатка соответственно. В одном из вариантов реализации функция параметров настройки предоставляет пользователю возможность экспорта отчетов.
[0154] В некоторых вариантах реализации интерактивный графический дисплей 310 может отображать сообщения об ошибках для направления соответствующих ответов пользователя, таких как в одном варианте выполнения сообщения об ошибках.
[0155] Цитирование приведенных здесь ссылок не является их признанием в качестве ссылок на уровень техники или их влияния на патентоспособность раскрытых здесь описаний. Все ссылки, процитированные в описательной секции спецификации настоящим, включены ссылкой в их полноте во всех назначениях. Если по меньшей мере одна из встроенных ссылок, литературных источников и подобных материалов отличается от настоящей заявки или противоречит ей, включая, помимо прочего, заданные условия, использование терминов, описанные технологии или тому подобное, приоритет остается за настоящей заявкой.
[0156] Некоторые варианты реализации и примеры, описанные здесь, являются лишь примерами и не предназначены для ограничения описания в полном объеме устройств и способов настоящего изобретения. Эквивалентные изменения, модификации и вариации некоторых вариантов реализации, материалов, составов и способов могут быть сделаны в пределах объема настоящего изобретения, по существу, с подобными результатами.
Реферат
Изобретение относится к медицинской технике, а именно к средствам для ультразвуковой косметической обработки. Система для эстетической визуализации и обработки содержит ручной зонд, включающий первое управляющее устройство, обеспечивающее ультразвуковую визуализацию, второе управляющее устройство, обеспечивающее обработку ультразвуком, перемещающий механизм для направления обработки ультразвуком отдельных тепловых областей воздействия, и сменные преобразующие модули. Перемещающий механизм содержит магнитный соединитель, расположенный между ручным зондом и первым и вторым преобразующими модулями. Способ выполнения косметической процедуры на субъекте осуществляют с использованием системы для эстетической визуализации и обработки. Способ выполнения косметической обработки проводят системой для косметической обработки, содержащей управляющее устройство для управления функцией обработки ультразвуком, и ручной зонд, выполненный с возможностью направления обработки ультразвуком посредством обеспечения линейной последовательности отдельных тепловых областей воздействия и содержащий по меньшей мере первый и второй сменные преобразующие модули, каждый из которых содержит герметичный корпус, заполненный текучей средой с акустически прозрачным элементом, жидкую соединяющую среду и по меньшей мере один ультразвуковой преобразователь. Использование изобретения позволяет повысить эфективность косметической обработки. 8 н. и 27 з.п. ф-лы, 22 ил.
Формула
ручной зонд, содержащий:
первое управляющее устройство для управления функцией ультразвуковой визуализации, обеспечивающее ультразвуковую визуализацию,
второе управляющее устройство для управления функцией обработки ультразвуком, обеспечивающее обработку ультразвуком,
перемещающий механизм, выполненный с возможностью направления обработки ультразвуком посредством обеспечения линейной последовательности отдельных тепловых областей воздействия, и
по меньшей мере первый и второй сменные преобразующие модули, выполненные с возможностью ультразвуковой визуализации и обработки ультразвуком и возможностью взаимозаменяемого соединения с ручным зондом,
причем перемещающий механизм содержит магнитный соединитель, расположенный между ручным зондом и первым и вторым преобразующими модулями,
первый преобразующий модуль выполнен с возможностью обработки ультразвуком на первой глубине ткани,
второй преобразующий модуль выполнен с возможностью обработки ультразвуком на второй глубине ткани, отличающейся от первой глубины ткани, и
первый и второй преобразующие модули выполнены с возможностью функциональной связи с первым управляющим устройством, вторым управляющим устройством и/или перемещающим механизмом.
управляющий блок,
при этом первое управляющее устройство и/или второе управляющее устройство выполнены с возможностью приведения в действие управляющим блоком,
а управляющий блок содержит процессор и графический пользовательский интерфейс для управления первым и вторым преобразующими модулями.
заменяют первый преобразующий модуль на второй преобразующий модуль,
визуализируют с помощью ультразвука вторую целевую область на указанном субъекте с использованием второго преобразующего модуля,
обрабатывают с помощью ультразвука вторую целевую область на указанном субъекте с использованием второго преобразующего модуля на второй глубине ткани, причем обработка второй целевой области включает обеспечение линий обработки, проходящих через эту область и автоматически выбранных перемещающим механизмом.
соединяют преобразующий модуль и ручной зонд,
содержащий первый переключатель для инициации акустической визуализации,
второй переключатель для инициации акустической обработки, обеспечивающей отдельные тепловые области воздействия и перемещающий механизм, выполненный с возможностью обеспечения требуемого шага между отдельными областями теплового воздействия, причем перемещающий механизм содержит магнитный соединитель, расположенный между ручным зондом и преобразующим модулем,
приводят преобразующий модуль во взаимодействие с поверхностью кожи субъекта прямо или косвенно,
запускают посредством первого переключателя на ручном зонде акустическую визуализацию области под указанной поверхностью кожи с помощью преобразующего модуля, и
запускают посредством второго переключателя на ручном зонде акустическую обработку указанной области под указанной поверхностью кожи с помощью преобразующего модуля с обеспечением требуемой последовательности отдельных тепловых областей воздействия посредством перемещающего механизма.
сбор данных, полученных в результате выполнения акустической визуализации; и
выполнение указанной акустической обработки на основании указанных данных.
отсоединение указанного преобразующего модуля от ручного зонда, и
присоединение второго преобразующего модуля к ручному зонду,
причем второй преобразующий модуль обеспечивает вторую акустическую обработку, отличную от акустической обработки, выполненной первоначально, при этом вторая акустическая обработка обеспечивает обработку на другой глубине под поверхностью кожи и/или на другой частоте.
причем первый и второй слои ткани расположены на различной глубине под одной областью поверхности кожи для обеспечения увеличения общего объема обрабатываемой ткани под указанной поверхностью кожи с улучшением общего косметического результата.
управляющее устройство для управления функцией обработки ультразвуком, и
ручной зонд, выполненный с возможностью направления обработки ультразвуком посредством обеспечения линейной последовательности отдельных тепловых областей воздействия и содержащий по меньшей мере первый и второй сменные преобразующие модули,
каждый из которых содержит герметичный корпус, заполненный текучей средой с акустически прозрачным элементом и содержащий жидкую соединяющую среду и по меньшей мере один ультразвуковой преобразователь, акустически связанный с указанным акустически прозрачным элементом посредством указанной жидкой соединяющей среды,
причем первый и второй преобразующие модули выполнены с возможностью взаимозаменяемого соединения с ручным зондом,
первый преобразующий модуль выполнен с возможностью обработки ультразвуком первого слоя ткани на первой фиксированной глубине,
второй преобразующий модуль выполнен с возможностью обработки ультразвуком второго слоя ткани на второй фиксированной глубине, второй слой ткани расположен на глубине, отличной от глубины расположения первого слоя ткани, и
первый и второй преобразующие модули выполнены с возможностью функционального соединения с указанным управляющим устройством.
управляющий блок,
причем первое управляющее устройство и/или второе управляющее устройство выполнено с возможностью приведения в действие управляющим блоком,
а управляющий блок содержит процессор и графический пользовательский интерфейс для управления первым и вторым преобразующими модулями.
Комментарии