Уборочная сельхозмашина - RU2596143C2
Код документа: RU2596143C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к уборочной сельхозмашине в соответствии с ограничительной частью пункта 1 и к способу в соответствии с ограничительной частью пункта 9 формулы изобретения.
Уровень техники
Уборочные сельхозмашины, в частности самоходные полевые измельчители, при своем рабочем движении во время уборки убирают растения с поля, измельчают их с помощью различных рабочих аппаратов и затем выбрасывают обработанную убранную массу с помощью перегрузочного устройства, называемого разгрузочной трубой, в грузовой контейнер, движущийся вместе с полевым измельчителем. Грузовой контейнер может находиться, например, на прицепе, который протягивается тягачом.
Для целенаправленного выброса в грузовой контейнер при различных условиях погрузки, в частности при различных расстояниях перекрытия при погрузке, например, по время замены грузовых контейнеров, при движении на поворотах, при наклонах на косогоре или других обстоятельствах, перегрузочное устройство установлено подвижно относительно рамы полевого измельчителя и может регулироваться по высоте путем наклона вокруг горизонтальной оси. Кроме того, в большинстве случаев на дальнем от машины конце перегрузочного устройства предусмотрен подвижный разгрузочный дефлектор, с помощью которого можно целенаправленно влиять на угол выброса убранной массы относительно горизонтальной плоскости. Указанные действия регулирования в перегрузочном устройстве выполняются выполненными соответствующим образом исполнительными органами, которые дистанционно приводятся в действие оператором полевого измельчителя. Помимо прочего, возможности регулирования служат для того, чтобы можно было влиять на желаемую дальность выброса, то есть расстояние от места установки перегрузочного устройства на полевом измельчителе до точки падения убранной массы на грузовом контейнере.
Требуемая для выброса убранной массы кинетическая энергия передается посредством, по меньшей мере, одного транспортирующего органа. При этом в полевом измельчителе речь идет, в частности, о метателе, который расположен в транспортирующем проводе после измельчительного аппарата по направлению транспортирования убранной массы и служит для дополнительного ускорения убранной массы перед ее входом в перегрузочное устройство. В целом другие рабочие аппараты полевого измельчителя, такие как приемные аппараты, измельчительный аппарат, устройство кондиционирования, уже передают убранной массе кинетическую энергию, поскольку они, кроме прочего, ускоряют ее. В любом случае кинетическая энергия предотвращает скопление убранной массы в восходящем транспортирующем проводе или в перегрузочном устройстве и их забивание. Таким образом, кинетическая энергия убранной массы, - дополнительно к состоянию перегрузочного устройства (см. выше), - оказывает большое влияние на достигаемую дальность выброса.
В патентном документе EP 1380204 описан метатель для самоходного полевого измельчителя, с помощью которого во время эксплуатации на уборке может регулироваться ускорение убранной массы. Для этого может изменяться размер прохода убранной массы через метатель путем перемещения барабана метателя относительно окружающего его корпуса машины. Регулирование производится в зависимости от параметров убранной массы, таких как плотность, влажность и/или скорость, с целью обеспечения надежного потока убранной массы при ее различных свойствах. При этом в документе не затрагивается вопрос изменения дальности выброса путем регулирования прохода.
В решении по патентному документу EP 1752037 с целью эффективной по затратам энергии перегрузки в грузовой контейнер транспортного средства ускорение убранной массы регулируется в зависимости от дальности выброса в грузовой контейнер. Благодаря этому, с одной стороны, при больших расстояниях перегрузки убранная масса получает высокую скорость для того, чтобы надежно достигать целевой точки в удаленном грузовом контейнере. С другой стороны, при коротком расстоянии перегрузки не производится ненужного ускорения убранной массы, что дает экономию энергии. Таким образом, изменение ускорения предпринимается для получения различной дальности выброса. Однако предметом изобретения по ЕР 1752037 не является повышение эффективности процессе перегрузки при одной и той же дальности выброса.
Раскрытие изобретения
Задачей изобретения является создание уборочной машины указанного типа, которая при обеспечении процесса перегрузки с низкими потерями убранной массы в значительной мере способствует экономии энергии. Задачей изобретения является также создание соответствующего способа перегрузки убранной массы.
В соответствии с изобретением решение поставленной задачи достигается в уборочной машине по пункту 1 формулы изобретения.
В основе заявленного предмета изобретения лежит осознание того, что при перегрузке убранной массы, выбрасываемой из перегрузочного устройства, в аспекте энергетической эффективности может быть выгодно, особенно при средних и больших дальностях выброса, выбрасывать убранную массу в грузовой контейнер не по пологой, почти прямой траектории полета (с требуемой для этого высокой мощностью выброса), а по более круто выгнутой дугообразной траектории (со сниженной мощностью выброса). Более крутая дугообразная траектория полета обеспечивается за счет более крутого угла выброса убранной массы из перегрузочного устройства. Альтернативно или дополнительно в аспекте энергетической эффективности может быть выгодно, чтобы убранная масса выходила из перегрузочного устройства на большей высоте выброса, чтобы получить ту же дальность при меньшей мощности выброса. Оба мероприятия (по отдельности или в комбинации) позволяют получать ту же дальность выброса при сниженном ускорении убранной массы. Благодаря этому процесс перегрузки требует меньших затрат энергии.
Уборочная машина по изобретению выгодным образом реализует это энергетически благоприятное состояние перегрузки за счет того, что содержит устройство управления, выполненное с возможностью привода в действие, чтобы компенсировать вызванное измененным ускорением убранной массы изменение дальности выброса убранной массы посредством управления, по меньшей мере, одним исполнительным органом перегрузочного устройства.
Таким образом, в соответствии с изобретением обеспечивается возможность эксплуатации уборочной машины со сниженным ускорением убранной массы в транспортирующем органе для получения требуемой дальности выброса. При этом за счет компенсирующей настройки состояния перегрузочного устройства устраняются потери убранной массы, которые обычно имеют место при простой перенастройке перегрузочного устройства из-за резкого изменения дальности выброса. Попросту говоря, устройство управления заботится о том, чтобы при изменении ускорения убранной массы ее струя по-прежнему попадала в грузовой контейнер. Изменение состояния перегрузочного устройства с помощью, по меньшей мере, одного исполнительного органа может заключаться в изменении положения (по высоте) и/или в изменении угла выброса и/или в изменении длины (например, телескопической разгрузочной трубы).
В самоходных уборочных машинах, таких как полевые измельчители, т.е. например, силосоуборочные комбайны, убранная масса ускоряется в различных рабочих аппаратах. Основное влияние на скорость убранной массы, необходимую для выброса через перегрузочное устройство, оказывает транспортирующий орган, называемый метателем. Этот известный сам по себе метатель в зависимости от своей конструкции обеспечивает то преимущество, что получаемое ускорение убранной массы может регулироваться просто и независимо от других рабочих аппаратов. Это может достигаться путем регулирования числа оборотов и/или размера прохода и/или установки лопастей и/или подачи воздуха метателем. Соответствующее регулирование может осуществляться с помощью мотора или другого исполнительного органа посредством дистанционного управления оператором машины и/или посредством привода их в действие устройством управления. Предпочтительно предназначенный для метателя датчик передает данные настройки на устройство управления.
Для обеспечения автоматической эксплуатации предпочтительно устройство управления связано с устройством, которое воспринимает достигнутую дальность выброса, то есть может определять ее количественно. На основе знания о фактически достигнутой дальности выброса осуществляется обратная связь, на основании которой устройство управления может решать, следует ли изменять состояние перегрузочного устройства и каким образом и в какой мере, чтобы как можно быстрее компенсировать изменение ускорения.
Достигнутая дальность выброса может определяться различным образом. Согласно одному возможному примеру осуществления достигнутая дальность выброса определяется устройством управления на основе известных параметров уборочной машины (отрегулированное ускорение в транспортирующем органе, состояние перегрузочного устройства) и, при необходимости, параметров убранной массы (влажность, вид, состояние убранной массы). В предпочтительном примере осуществления предусмотрено, что устройство для восприятия дальности выброса содержит оптический датчик, в особенности камеру. Камера установлена соответствующим образом на уборочной машине и/или на грузовом контейнере и ориентирована так, что воспринимает точку падения выбрасываемой убранной массы в грузовой контейнер. На основе электронной обработки изображения, которая известна сама по себе, устройство может количественно определять достигнутую дальность выброса. Это обеспечивает возможность проверки дальности выброса.
В соответствии с изобретением устройство управления управляет, по меньшей мере, одним исполнительным органом для изменения состояния перегрузочного устройства с целью компенсации изменения дальности выброса. При этом речь идет об исполнительном органе, привод в действие которого приводит перегрузочное устройство в состояние измененной дальности выброса. Это может быть, например, исполнительный орган для регулирования высотного положения перегрузочного устройства и/или исполнительный орган для изменения угла выброса перегрузочного устройства и/или исполнительный орган для изменения длины перегрузочного устройства.
Для получения обратной связи о предпринятом управлении предпочтительно для каждого исполнительного органа предназначен датчик. При этом может идти речь, например, о датчике для восприятия высотного положения перегрузочного устройства и/или о датчике для восприятия угла выброса перегрузочного устройства и/или о датчике для восприятия длины перегрузочного устройства, причем устройство управления получает сигналы соответствующего датчика.
Управление, выполняемое устройством управления для компенсации дальности выброса, может осуществляться различным образом. Предпочтительно устройство управления может активизироваться и деактивизироваться с помощью связанного с ним устройства привода в действие. Благодаря этому оператор машины может свободно решать, следует ли и когда следует использовать поддерживающую функцию.
Решение поставленной задачи обеспечивается также способом по пункту 9 формулы изобретения.
В соответствии с изобретением способ отличается тем, что вызванное измененным ускорением изменение дальности выброса убранной массы компенсируют посредством изменения состояния перегрузочного устройства. В способе достигаются те же воздействия и преимущества, что и в уборочной машине по изобретению, так что во избежание повторений здесь делается ссылка на соответствующие примеры осуществления.
При этом в целом изменение ускорения убранной массы может производиться вручную оператором машины и/или автоматизировано, предпочтительно с целью достижения энергетической эффективности процесса перегрузки. Однако способ может служить также для того, чтобы реагировать на изменение ускорения убранной массы по другим причинам, таким как нежелательные колебания привода транспортирующего органа (например, в случае перегрузки главного привода уборочной машины). Таким путем может поддерживаться ранее настроенная дальность выброса.
Согласно предпочтительному решению по развитию изобретения в рамках программы процесса выполняют следующие шаги способа:
a) определяют достигнутую первоначальную дальность выброса,
b) проверяют, может ли установленная дальность выброса достигаться со сниженным ускорением, причем в случае потенциала снижения проводят следующие мероприятия:
с) задают сниженное ускорение убранной массы,
d) задают измененное состояние перегрузочного устройства, чтобы достигнуть первоначальной дальности выброса.
Следует заметить, что шаги с) и d) могут выполняться как друг за другом (последовательно), так и одновременно (параллельно). В случае последовательной обработки обеспечивается простое и, соответственно, надежное управление. При этом альтернативно шаги с) и d) могут также следовать друг за другом в обратном порядке (то есть сначала d), а потом с)). За счет того, что вначале задают измененное состояние перегрузочного устройства и только затем сниженное ускорение, может, например, устраняться забивание в транспортирующем проводе. В отличие от этого параллельное по времени (синхронное) выполнение указанных шагов приводит к более быстрому результату. Предпочтительно отдельные шаги обрабатываются устройством управления в ходе выполнения программы.
Предпочтительно шаги с b) по d) повторяют настолько часто, насколько необходимо для достижения минимального ускорения для получения первоначальной дальности выброса. За счет такого повторного проведения путем неоднократного регулирования и проверки достигается состояние перегрузки, оптимальное в энергетическом отношении.
Предпочтительно предусмотренные на шагах с) и d) способа мероприятия проводят в рамках устанавливаемых интервалов настройки. При этом настройка перегрузочного устройства на каждом шаге способа производится только в определенной ограниченной мере. Преимущество этого для процесса перегрузки заключается в том, что точка падения убранной массы в грузовой контейнер не изменяется слишком внезапно и/или слишком резко, что могло бы приводить к потерям убранной массы. Предпочтительно желаемый интервал настройки может задаваться оператором машины.
Согласно возможному решению по развитию способа задания, предусмотренные на шагах с) и d) программы процесса, выдаются оператору машины, например, в виде рекомендации и/или информации. Это может давать то преимущество, что оператор машины может предпринимать соответствующие настройки по своему свободному усмотрению. Выдача информации может осуществляться оптически на индикаторном устройстве или акустически по динамику в кабине водителя.
Дополнительно или альтернативно выдаче заданий программа процесса после ее активизации оператором машины (например, посредством нажатия кнопки) может выполняться автоматически, при этом устройство управления автоматически проводит настройку машины, заданную на шагах с) и d). В этом случае снижение ускорения и компенсация дальности выброса производятся полностью автоматическим образом.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будет подробно описан пример осуществления изобретения. Из описания будут ясны другие особенности и преимущества изобретения. На чертежах:
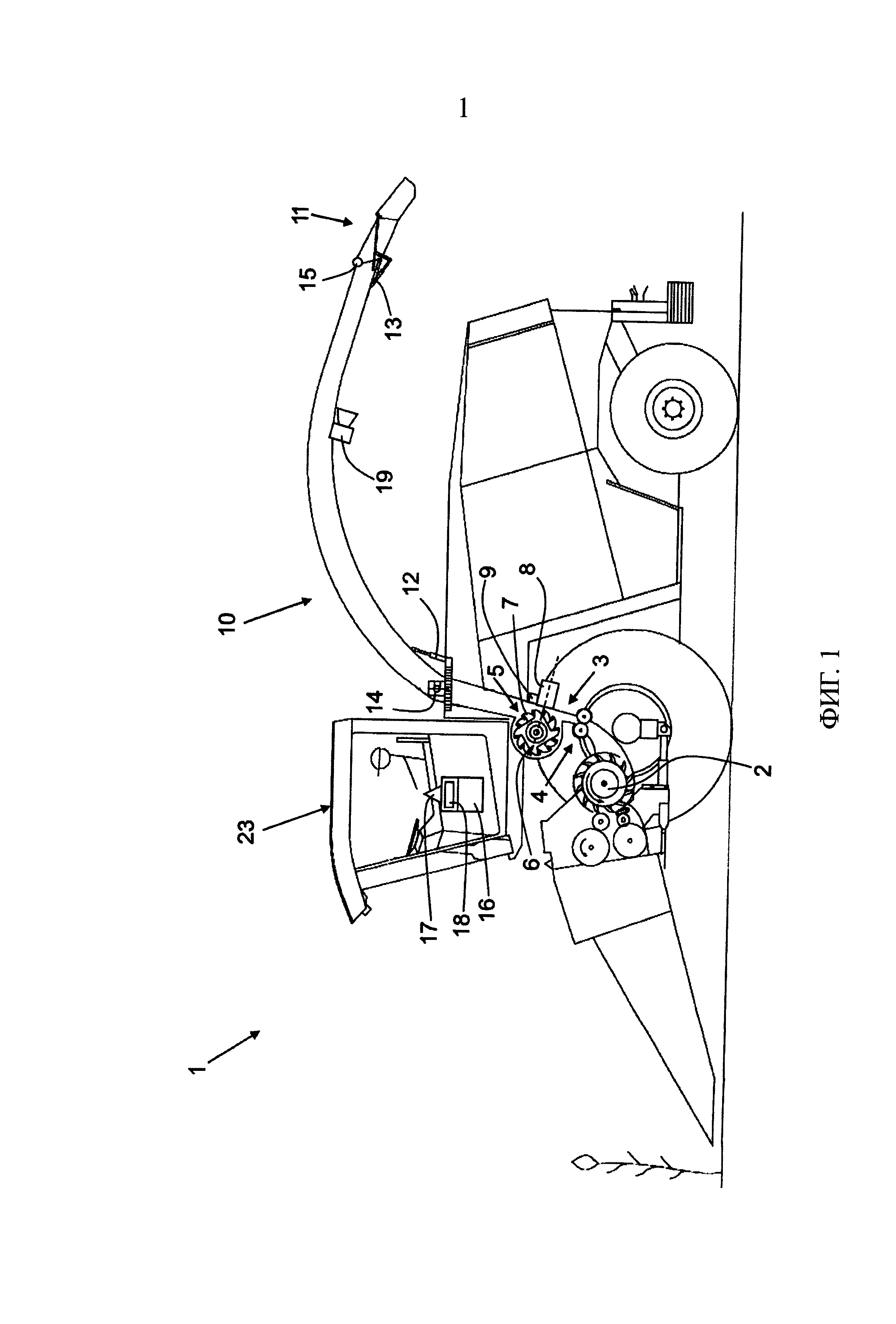
фиг.1 схематично изображает на виде сбоку полевой измельчитель по изобретению,
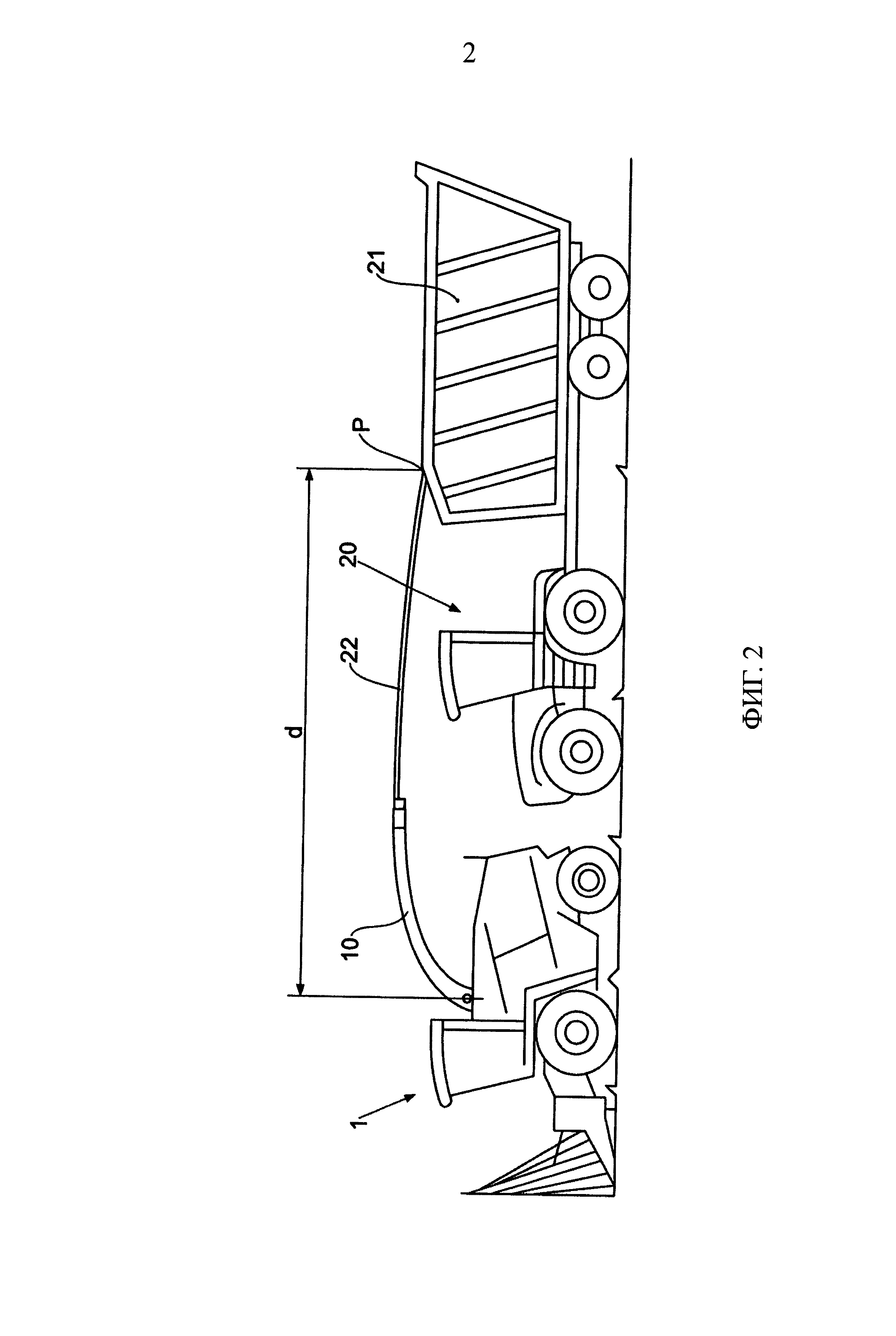
фиг.2 схематично изображает процесс перегрузки с пологим выбросом,
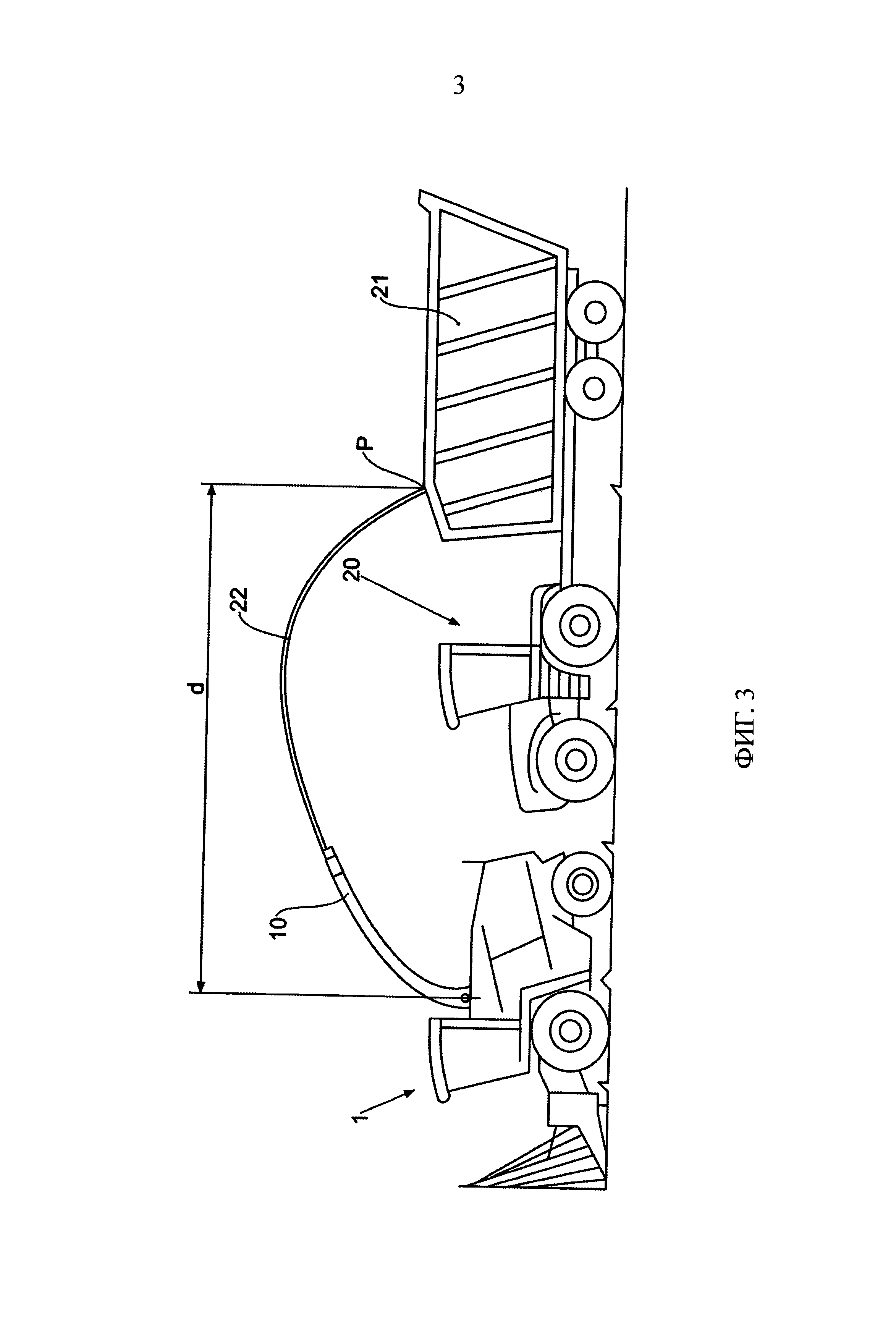
фиг.3 схематично изображает процесс перегрузки с дугообразным выбросом.
Осуществление изобретения
На фиг.1 схематично показан на виде сбоку пример уборочной сельхозмашины по изобретению, выполненной в виде самоходного полевого измельчителя 1. Во время рабочего движения на уборке полевой измельчитель 1 с помощью навесного аппарата (не обозначен) срезает растительность с поля, чтобы подавать весь убранный растительный материал через приемные органы (не обозначены) к измельчительному аппарату 2. Там убранная масса известным образом измельчается и поступает в транспортирующий провод 3, который проходит от измельчительного аппарата 2, расположенного под кабиной 23- водителя, с подъемом в области за кабиной 23 водителя и выходит в перегрузочное устройство 10.
В транспортирующем проводе 3 расположено устройство 4 кондиционирования. Метатель 5 расположен за этим устройством 4 кондиционирования по направлению потока убранной массы. Метатель 5 содержит оснащенный множеством лопастей 7 барабан 6 метателя, который установлен с возможностью вращательного привода, чтобы ускорять убранную массу, поступающую в область действия лопастей 7, в направлении потока убранной массы с помощью воздушного потока, создаваемого лопастями 7. Ось вращения барабана 6 метателя может перемещаться (как это показано штриховой линией) посредством исполнительного мотора 8, так что проход метателя, образованный между лопастями 7 и задней стенкой метателя (на чертеже она соответствует правой кромке транспортирующего провода 3) может регулироваться приводными средствами. Поскольку барабан 6 метателя, кроме прочего, приводится вместе и измельчительным аппаратом 2, за счет реализованной возможности регулирования размера прохода, несмотря на остающееся прежним число оборотов привода обеспечивается возможность влияния на ускорение убранной массы, придаваемое ей метателем 5. Может быть предусмотрен датчик 9 размера прохода, чтобы воспринимать установленный размер прохода, который при известном числе оборотов является мерилом придаваемого метателем 5 ускорения. Для специалиста в данной области очевидно, что также и другие транспортирующие органы или транспортирующие органы, выполненные отличным от метателя 5 образом, могут обеспечивать изменяемое ускорение убранной массы.
Выполненное в виде разгрузочной трубы 10 перегрузочное устройство установлено (помимо прочего) с возможностью поворота с изменением высоты относительно рамы полевого измельчителя 1. Подъемный цилиндр 12 между рамой и разгрузочной трубой 10, служит для регулирования высоты разгрузочной трубы 10. Датчик 14 высоты, например, в виде поворотного потенциометра, может воспринимать установленный угол поворота высотного положения.
На дальнем от машины конце разгрузочной трубы 10 расположен разгрузочный дефлектор 11, который за счет возможности его поворота позволяет влиять на угол выброса убранной массы из разгрузочной трубы 10. Перестановка разгрузочного дефлектора 11 осуществляется исполнительным цилиндром 13, при этом датчик 15 угла воспринимает положение дефлектора. В комбинации с воспринятым углом поворота высотного положения разгрузочной трубы (датчик 14) из углового положения разгрузочного дефлектора 11 может быть вычислен угол выброса относительно горизонтальной плоскости.
Для оптического восприятия достигнутой точки падения (см. точку Р на фиг.2 и 3)убранной массы, выброшенной в процессе уборки, на разгрузочной трубе установлена камера 19, направленная на целевую область выброса разгрузочной трубы 10.
В кабине 23 водителя, в которой имеется место оператора машины, расположено устройство 16 управления в виде числового процессора сигналов. Устройству 16 управления подчинены блок 18 оптического вывода для предоставления информации оператору машины и выключатель 17 для активизации и деактивизации управления. Устройство 16 управления соединено сигнальными линиями, которые в целях наглядности не показаны, с исполнительными органами перегрузочного устройства 10, такими как подъемный цилиндр 12 и исполнительный цилиндр 13, и с датчиками, такими как датчик 9 размера прохода, датчик 14 высоты, датчик 15 угла, а также с камерой 19. Для специалиста в данной области очевидно, что могут использоваться и другие или дополнительные исполнительные органы и датчики.
Принцип действия полевого измельчителя 1 по изобретению будет далее пояснен со ссылками на фиг.2 и 3, на которых показан процесс перегрузки из полевого измельчителя 1 в протягиваемый трактором 20 грузовой контейнер 21 в различных ситуациях. На фиг.2 и 3 в целях наглядности показан в упрощенном виде полевой измельчитель по фиг.1. Для пояснения отдельных имеющихся особенностей во избежание повторений дальнейший текст базируется на уже описанных примерах выполнения.
На фиг.2 показан полевой измельчитель 1 при рабочем движении уборки по полю и следующий за ним трактор 20, который тянет за собой грузовой контейнер 21. Убранная масса 22 выходит из разгрузочной трубы 10 полевого измельчителя 1, идет по траектории, почти параллельной горизонтальной плоскости, в виде примерно прямой струи убранной массы и входит в точке P падения в грузовой контейнер 21. При этом убранная масса 22 покрывает дальность d выброса от места установки разгрузочной трубы 10 на раме полевого измельчителя 1 до точки P падения в грузовом контейнере 21. Для того, чтобы убранная масса 22 могла пройти расстояние d при таком пологом угле выброса, она должна выходить из разгрузочной трубы 10 с очень высокой скоростью. Поэтому метатель 5 (см. фиг.1) должен придавать убранной массе 22 соответствующий высокое ускорение. Для этого в примере выполнения по фиг.1 размер прохода метателя 5 снижается до минимума. Соответственно, процесс перегрузки является интенсивным по затратам энергии.
Далее, в полевом измельчителе 1 по изобретению или при использовании способа по изобретению обеспечивается возможность выполнять экономичный по затратам энергии процесс перегрузки, схематично представленный на фиг.3. Этот процесс запускается, например, оператором машины путем привода в действие выключателя 17 (см. фиг.1). При запуске устройство 16 управления (см. фиг.1) в рамках программы процесса выполняет различные рабочие шаги. В соответствии с программой вначале устройство 16 управления запрашивает сигнал от камеры 19, чтобы на основе обработки изображения определить достигнутую дальность d выброса при процессе перегрузки. Альтернативно дальность выброса может определяться другим путем, - например, косвенно, посредством вычисления на основе рабочих параметров полевого измельчителя 1, таких как установка разгрузочной трубы 10 и ускорение убранной массы 22.
Далее устройство 16 управления проверяет, может ли установленная дальность d выброса достигаться со сниженным ускорением метателя 5. При этой проверке устройство 16 управления может учитывать также другие существенные для процесса перегрузки параметры, например, такие как свойства убранной массы (вид, характер, влажность, длина резки при измельчении), расход убранной массы, ее скорость в разгрузочной трубе, ветровые условия и другие. В случае подтверждения устройство 16 управления подает на исполнительный мотор 8 сигнал управления, чтобы слегка открыть (увеличить) проход метателя 5. Производительность метателя 5 снижается, что дает экономию энергии.
Поскольку при одном только снижении ускорения убранной массы 22 дальность d выброса снижалась бы очень быстро, то если при этом струя убранной массы уже не достигает грузового контейнера 21, имели бы место потери убранной массы.
Поэтому в соответствии с изобретением устройство 16 управления придает перегрузочному устройству 10 измененное состояние для того, чтобы сохранить первоначальную дальность d выброса или, по меньшей мере, вновь достигнуть ее. Задание измененного состояния производится посредством соответствующего сигнала управления на, по меньшей мере, один из исполнительных органов (подъемный цилиндр 12 и/или исполнительный цилиндр 13) перегрузочного устройства 10. При этом перегрузочное устройство 10 как можно быстрее принимает другое положение, например, показанное на фиг.3. Для контроля датчики 14, 15 передают на устройство 16 управления сигналы обратной связи о настройке соответствующих исполнительных органов 12, 13.
Как показано на фиг.3, перегрузочное устройство 10 находится в поднятом положении по сравнению с фиг.2, что достигается приводом в действие подъемного цилиндра 12. Угол установки разгрузочного дефлектора 11 по сравнению с фиг.2 не изменен. Благодаря подъему перегрузочного устройства 10 убранная масса 22 выходит под более крутым углом выброса и проходит по траектории, которая по сравнению с траекторией по фиг.2 значительно более изогнута, однако покрывает ту же дальность d выброса, что и на фиг.2, так что достигает той же точки P падения в грузовой контейнер 21. При этом для показанного на фиг.3 состояния перегрузки требуется меньше энергии для ускорения убранной массы 22, чем для состояния по фиг.2. Дополнительное преимущество состоит в том, что в случае по фиг.3 убранная масса 22 падает в точку P падения с меньшей поперечной скоростью. За счет этого дополнительно устраняется отскок убранной массы назад от точки Р падения.
Может быть предусмотрено, что после достижения состояния по фиг.3 устройство 16 управления автоматически проводит проверку того, может ли дальность d выброса достигаться при дальнейшем снижении ускорения метателя 5. В случае подтверждения снова проводятся уже описанные мероприятия по заданию сниженного ускорения и настройки дальности выброса. Предпочтительно устройство 16 управления повторяет эти шаги до тех пор, пока метатель 5 не станет работать на минимальном ускорении.
Для того, чтобы при задании мероприятий по регулированию (снижение ускорения, настройка дальности выброса) не происходило потерь убранной массы, может быть предусмотрено, что регулирование производится мелкими шагами, так что дальность d выброса изменяется понемногу, и конечное состояние достигается только после многократного повторения, но надежным образом.
Альтернативно полностью автоматической настройке с помощью устройства 16 управления задание сниженного ускорения убранной массы 22 и задание соответствующего состояния разгрузочной трубы 10 может производиться с помощью устройства 18 вывода посредством рекомендаций оператору машины. Оператор может самостоятельно решать, следовать ли рекомендациям или нет.
Следует заметить, что ситуации перегрузки по фиг.2 и 3 представляют только примеры использования изобретения. Вместо показанной задней перегрузки из полевого измельчителя 1 изобретение может использоваться для боковой перегрузки убранной массы из полевого измельчителя с получением сходных преимуществ. Далее, следует добавить, что компенсация дальности d выброса при другой конфигурации или при других размерах машин кроме показанного единственного регулирования с помощью гидроцилиндра 12 дополнительно или альтернативно возможна путем регулирования разгрузочного дефлектора 11 и/или регулирования других возможных (не показанных) аппаратов, которые влияют на дальность d выброса.
Перечень ссылочных обозначений на чертежах
1 Полевой измельчитель (d - Дальность выброса)
2 Измельчительный аппарат (P - Точка падения)
3 Транспортирующий провод
4 Устройство кондиционирования
5 Метатель
6 Барабан метателя
7 Лопасть
8 Исполнительный мотор
9 Датчик размера прохода
10 Разгрузочная труба
11 Разгрузочный дефлектор
12 Подъемный цилиндр
13 Исполнительный цилиндр
14 Датчик высоты
15 Датчик угла
16 Устройство управления
17 Выключатель
18 Устройство вывода
19 Камера
20 Трактор
21 Грузовой контейнер
22 Убранная масса
23 Кабина водителя
Реферат
Группа изобретений относится к области сельского хозяйства. Уборочная сельхозмашина содержит по меньшей мере один транспортирующий орган для изменяемого ускорения убранной массы и расположенное за транспортирующим органом перегрузочное устройство для выброса убранной массы в грузовой контейнер. Перегрузочное устройство выполнено с возможностью изменения его состояния с помощью по меньшей мере одного исполнительного органа для оказания влияния на достигаемую дальность выброса. Сельхозмашина содержит устройство управления, выполненное с возможностью привода в действие, чтобы компенсировать вызванное измененным ускорением убранной массы изменение дальности выброса убранной массы посредством управления по меньшей мере одним исполнительным органом перегрузочного устройства. Способ перегрузки убранной массы из уборочной сельхозмашины в грузовой контейнер состоит в том, что убранную массу ускоряют изменяемым образом в уборочной машине и выбрасывают через перегрузочное устройство с дальностью выброса. Вызванное измененным ускорением изменение дальности выброса убранной массы компенсируют посредством изменения состояния перегрузочного устройства. Обеспечивается процесс перегрузки с низкими потерями убранной массы, что в значительной мере способствует экономии энергии. 2 н. и 13 з.п. ф-лы, 3 ил.
Формула
отличающаяся тем, что содержит устройство (16) управления, выполненное с возможностью привода в действие, чтобы компенсировать вызванное измененным ускорением убранной массы (22) изменение дальности (d) выброса убранной массы посредством управления по меньшей мере одним исполнительным органом (12, 13) перегрузочного устройства (10).
отличающийся тем, что вызванное измененным ускорением изменение дальности (d) выброса убранной массы (22) компенсируют посредством изменения состояния перегрузочного устройства (10).
e) определяют достигнутую первоначальную дальность (d) выброса,
f) проверяют, может ли обнаруженная дальность (d) выброса достигаться со сниженным ускорением, причем в случае потенциала снижения проводят следующие мероприятия:
g) задают сниженное ускорение убранной массы (22),
h) задают измененное состояние перегрузочного устройства (10), чтобы достигнуть первоначальной дальности (d) выброса.
Документы, цитированные в отчёте о поиске
Система управления перегрузкой убранной массы в сельскохозяйственной машине
Комментарии