Чемодан с выдвижными рулевыми колесами - RU2406421C1
Код документа: RU2406421C1
Чертежи








Описание
Это изобретение относится к оригинальному чемодану-тележке с выдвижными рулевыми колесами.
Специалистам в данной области техники известны примеры реализации чемоданов-тележек с парой колес на нижней стороне чемодана и выдвижной ручкой на верхней стороне для перемещения чемодана без чрезмерных усилий в результате вращения колес.
Известны также и примеры установки на раме чемодана доски, которая может быть использована впоследствии для преобразования чемодана в самокат. Доска прикреплена к чемодану со стороны установки колес с помощью шарнира и может поворачиваться между нерабочим положением, в котором она касается одной поверхности чемодана, и положением, в котором она выступает от корпуса чемодана и обеспечивает возможность поддержки человека. Доска снабжена колесом, установленным на ее конце, удаленном от корпуса чемодана, что позволяет пользователю использовать эту доску в качестве подножки и, держась за рукоятку, ехать, как на самокате. Но в изделиях, известных специалистам, могут возникать трудности, связанные с управлением направлением при движении с опорой на доску в конструкции самоката.
Существуют заявки на рулевые системы управления направлением движения, которые, однако, занимают много места и использование которых ведет к нежелательному уменьшению объема чемодана.
Кроме того, известные рулевые системы имеют сложную и дорогостоящую конструкцию.
Общей целью настоящего изобретения является устранение вышеупомянутых недостатков и создание отвечающего предъявляемым требованиям чемодана-тележки, преобразуемого в самокат, имеющий эффективную и негромоздкую рулевую систему.
Другая цель данного изобретения заключается в создании отвечающего предъявляемым требованиям чемодана с рулевыми колесами простой конструкции и экономичного.
Для реализации этой цели была предпринята попытка реализации в соответствии с настоящим изобретением чемодана в соответствии с пунктом 1 формулы изобретения.
Для пояснения новых принципов настоящего изобретения и его преимуществ по сравнению с известными далее приводится подробное описание возможных и не ограничивающих объем защиты вариантов воплощения изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - вид чемодана согласно варианту воплощения настоящего изобретения,
фиг.2 - вид чемодана, представленного на фиг.1, в конфигурации самоката,
фиг.3 - вид кинематического механизма чемодана в деталях, предназначенного для выдвижения рулевых колес в конфигурации с втянутыми колесами,
фиг.4 - вид того же механизма, что и на фиг.3, с рулевыми колесами в выдвинутом положении,
фиг.5 - виду сверху на рулевую систему чемодана согласно приведенным выше фигурам,
фиг.6 - вид в перспективе рулевого механизма чемодана согласно другому варианту воплощения настоящего изобретения без доски самоката и с рулевыми колесами во втянутом положении,
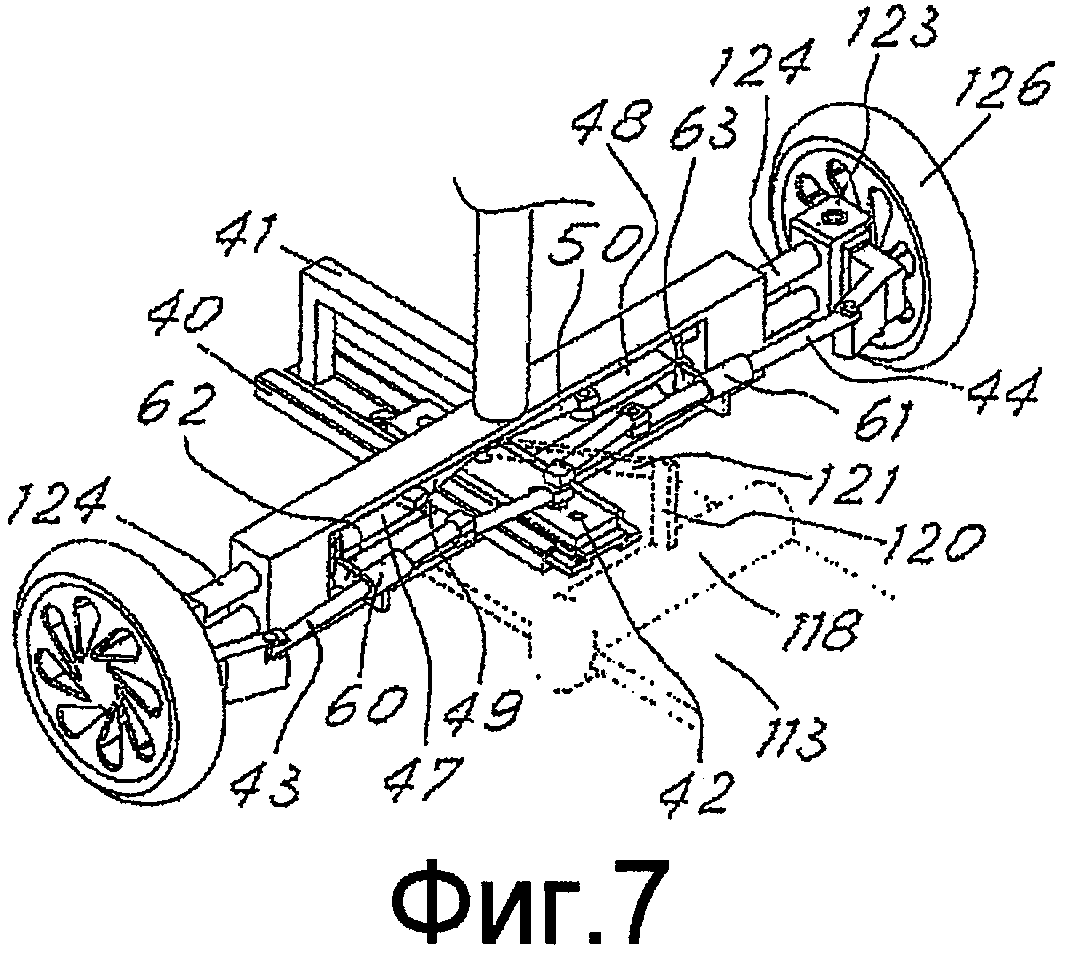
фиг.7 - вид того же механизма, что и на фиг.5, с рулевыми колесами в выдвинутом рабочем положении и доской самоката, показанной схематически пунктирными линиями,
фиг.8 - вид сверху на рулевую систему чемодана при другом варианте воплощения изобретения, иллюстрируемом фиг.6 и 7, и
фиг.9 - вид в перспективе рулевого механизма чемодана согласно третьему варианту воплощения настоящего изобретения с использованием тросов Боудена и другим механизмом выдвижения рулевых колес.
Ниже со ссылками на фиг.1-5 приводится описание первого варианта воплощения чемодана 11 согласно настоящему изобретению.
Чемодан 11 имеет корпус 12, образующий сам чемодан, доску 13 и рукоятку 14, являющуюся в предпочтительном варианте выдвижной. Корпус чемодана 12 представляет собой практически параллелепипед и имеет пару рулевых колес 16 на одной из своих нижних сторон 17. Колеса установлены на противоположных сторонах чемодана и ориентированы вдоль нижней стороны 17 чемодана. Рукоятка 14 может выдвигаться из корпуса чемодана 12 на его верхней стороне, противоположной стороне с колесами 16, как показано на фиг.2.
Доска 13 закреплена на стороне 17 с помощью шарнира 18, параллельного оси рулевых колес 16. Доска 13 имеет свободное колесо 15, установленное вблизи ее конца, удаленного от шарнира 18, и может поворачиваться между нерабочим положением, в котором она примыкает к поверхности корпуса чемодана (фиг.1), и положением, в котором она проходит от корпуса 12 (фиг.2), в предпочтительном варианте изобретения по существу перпендикулярно более широкой поверхности чемодана.
В случае когда доска 13 находится в рабочем положении, как на фиг.2, она может удерживать пользователя чемоданом, и может иметься средство фиксации, удерживающее доску в рабочем положении относительно корпуса чемодана 12. Это средство фиксации может быть реализовано в виде любого известного специалистам в данной области техники средства, и поэтому его описание не приводится.
Колеса 16 могут перемещаться между втянутым положением, в котором они располагаются вблизи корпуса чемодана (фиг.1), и выдвинутым положением, в котором они выступают от корпуса (фиг.2) и в котором с их помощью обеспечивается рулевое управление. Во втянутом положении, как на фиг.1, колеса 16 входят в углубления 19 на противоположных сторонах корпуса чемодана 12.
Рукоятка 14 имеет T-образную форму с телескопическим штоком 14a, ориентированным почти перпендикулярно доске 13 в случае, когда доска находится в рабочем положении, в котором она проходит от корпуса 12.
Рулевое управление колесами 16 осуществляется посредством рукоятки 14, имеющей специальное кинематическое соединение с рулевыми колесами.
В предпочтительном варианте изобретения между доской 13 и рулевыми колесами 16 имеется второе кинематическое соединение, которое при перемещении доски из нерабочего положения в рабочее положение, в котором она выступает от корпуса чемодана 12, обеспечивает переход колес из втянутого положения вблизи корпуса 12 в выдвинутое положение, в котором они выступают от корпуса 12.
Фиг.3-5 в деталях иллюстрируют вариант реализации рулевой системы и кинематического соединения для выдвижения колес 16 после опускания доски 13.
Чемодан 11 включает в себя раму 22, которая должна крепиться к корпусу чемодана 12 (не показанного на фиг.3) и относительно которой может двигаться пара опорных стоек 23 для колес 16.
Опорные стойки 23 закреплены на штангах 24a, 24b, которые входят в направляющие отверстия, выполненные на противоположных сторонах рамы 22. В предпочтительном варианте изобретения для каждой опорной стойки 23 предусмотрены две подвижные штанги 24a, 24b.
К опорным стойкам 23 с помощью шарниров прикреплены оси колес 16, которые при выдвинутом положении могут поворачиваться вокруг вертикальной оси.
Рама 22 имеет форму удлиненной практически прямоугольной каркасной конструкции, размещенной параллельно нижней стороне 17 корпуса чемодана, со штангами 24a, 24b, которые входят в отверстия, выполненные на противоположных коротких сторонах рамы 22.
Со стороны конца, обращенного внутрь рамы 22, штанги 24a соединены одна с другой посредством детали, прикрепленной с помощью вертикального шарнира 70 к штанге 25a (см. фиг.4). Точно так же штанги 24b соединены одна с другой деталью, прикрепленной с помощью шарнира к штанге 25b.
Эти две штанги 25a и 25b установлены последовательно и соединены с помощью шарнира одна с другой на концах, противоположных концам, прикрепленным к штангам 24a и 24b.
В точке шарнирного соединения между этими двумя штангами 25a, 25b закреплен небольшой узел 38, который в свою очередь прикреплен с помощью шарнира к рабочему звену 21, служащему для передачи движения на опорные стойки 23 с помощью штанг 25a, 25b при повороте доски 13.
Рабочее звено 21 в предпочтительном варианте изобретения образовано штангой 21, закрепленной одним своим концом на узле 38, а противоположным концом - на рычаге 20, составляющем одно целое с доской 13.
Доска 13 прикреплена посредством горизонтального шарнира 18 к полке 26, прикрепленной к раме 22. Рычаг 20 закреплен на участке шарнира 18, составляющем одно целое с доской 13.
В случае когда доска находится в поднятом нерабочем положении (фиг.3), штанга 21 отжимается в направлении удаления от шарнира 18 посредством рычага 20 и отводит штанги 25a, 25b в положение, в котором они располагаются под углом к направлению движения опорных стоек 23. При этом колеса находятся во втянутом положении вблизи рамы 22 и, следовательно, вблизи корпуса чемодана 12.
В случае когда доска находится в опущенном рабочем положении (фиг.4), штанги 25a, 25b выдвигаются штангой 21 до положения совмещения со штангами 24, а колеса при этом отжимаются в направлении удаления от рамы 22.
Шток 14a рукоятки служит для рулевого управления колесами 16 и установлен с возможностью поворота на звене 37, прикрепленном к раме 22 с противоположной стороны относительно шарнира 18 доски 13.
Было установлено, что реализовать рулевую систему целесообразно можно, в частности, с помощью тросов Боудена.
Как показано на представленном на фиг.5 виде сверху, кинематическое соединение для рулевого управления включает в себя три троса Боудена. Первый трос 27 установлен между штоком 14a рукоятки и правым колесом 16, второй трос 28 - между штоком 14a и левым колесом 16, а третий трос 29 установлен между этими двумя колесами 16.
В частности, тросы 27, 28 закреплены одним концом на противоположных сторонах штока 14a на радиальных фланцах 30, 31. Тросы 27, 29 закреплены одним концом на противоположных фланцах 33 и 34, выступающих от детали, составляющей одно целое с осью правого колеса 16, и соединены с помощью шарниров с опорной стойкой 23. Тросы 28 и 29 закреплены на противоположных фланцах 35, 36, выступающих от детали, которая поддерживает ось левого колеса 16.
Внешняя оболочка 27a троса 27 закреплена между деталью 32, выступающей в вертикальном направлении от звена 37, и боковым фланцем опорной стойки 23, соединенной с правым колесом. Внешняя оболочка 28a троса 28 Боудена закреплена между деталью 32 и боковым фланцем опорной стойки 23, соединенной с левым колесом. Трос 29 имеет внешнюю оболочку 29a, закрепленную между боковыми фланцами опорных стоек 23 для этих двух колес 16.
При повороте рукоятки 14 влево трос 27 натягивается и тянет за собой правое колесо, поворачивая его в положение, показанное на фиг.5.
Передача поворота правого колеса через трос 29 на левое колесо приводит к соответствующему его повороту. При повороте рукоятки рулевого управления вправо кинематическое соединение, образуемое тросами Боудена, работает в противоположном направлении.
Рулевое управление колесами 16 может осуществляться в случае, когда доска 13 находится в опущенном положении и колеса находятся в выдвинутом положении. Но когда доска находится в поднятом положении, колеса касаются рамы 22 и корпуса чемодана и места для выполнения поворота нет.
Тот факт, что колеса являются выдвижными, позволяет предотвратить потерю емкости чемодана, и не нужно выполнять достаточно большие углубления в корпусе чемодана для колес с возможностью рулевого управления.
Кроме того, рулевые колеса, располагающиеся на большем расстоянии одно от другого, позволяют повысить устойчивость чемодана в конструкции самоката.
Фиг.6-8 иллюстрируют другой вариант реализации рулевой системы чемодана согласно этому изобретению.
Следует отметить, что кинематический механизм, соединяющий доску 113 и колеса 126 для обеспечения управления их боковым выдвижением, является подобным описываемому в варианте реализации, иллюстрируемом фиг.1-5.
В другом варианте реализации также обязательно имеется рама 122, которая должна крепиться к корпусу чемодана (не показанного на фигуре) и относительно которой могут двигаться штанги 124, поддерживающие опорные стойки 123 для этих двух рулевых колес 126.
Штанги 124, связанные с левым колесом, соединены одна с другой и закреплены со стороны конца, обращенного внутрь рамы 122, на соединительном звене 47. Точно так же подвижные штанги 124, связанные с правым колесом, соединены одна с другой и закреплены со стороны конца, обращенного внутрь рамы 122, на соединительном звене 48. Концы звеньев 47 и 48 рамы 122, обращенные внутрь рамы, соединены один с другим посредством двух штанг 49, 50, которые шарнирно соединены последовательно, как показано на фигуре.
На своих концах, противоположных звеньям 47, 48, эти две штанги 49, 50 шарнирно соединены с салазками 42, установленными с возможностью движения на направляющей 40, размещенной в основном перпендикулярно раме 122 и с возможностью поворота относительно рамы вокруг вертикальной оси, как поясняется ниже.
Как показано на фиг.7 и 8, движение салазок 42 вдоль направляющей 40 обеспечивается посредством штанги 121, прикрепленной к доске 113 с помощью рычага 120, образующего с этой штангой шарнирное соединение. Рычаг 120, как показано, может быть закреплен на участке шарнира 118, составляющем одно целое с доской 113, подобно рычагу 20 в описываемом выше варианте реализации.
В случае когда доска 113 находится в поднятом нерабочем положении, штанга 121 отжимается вперед относительно рамы 122, а салазки 42 перемещаются в положение, представленное на фиг.6, при котором штанги 49 и 50 располагаются под углом к штангам 124, а колеса 126 находятся во втянутом положении.
В случае когда доска 113 находится в опущенном рабочем положении (фиг.7 и 8), штанга 121 перемещает салазки в крайнее положение, при котором штанги 49 и 50 располагаются почти параллельно штангам 124, а колеса находятся в выдвинутом положении. Кинематическое соединение для обеспечения выдвижения колес является в основном подобным описываемому выше в варианте воплощения, иллюстрируемом фиг.1-5.
Направляющая 40 установлена на раме 122 с возможностью поворота вокруг оси, совпадающей с осью штока 114a рукоятки, и поворот этой направляющей обеспечивается посредством соединительной детали 41, которая в предпочтительном варианте воплощения изобретения соединена с самым удаленным относительно рамы 122 участком направляющей 40.
В случае когда доска 113 находится в опущенном рабочем положении, точка соединения штанги 121 с салазками 42 находится в основном на оси поворота этих салазок и рукоятки 114a.
Кинематический рулевой механизм включает в себя штанги 43 и 45 для левого колеса и штанги 44 и 46 для правого колеса (фиг.8).
Штанги 43, 45 шарнирно соединены последовательно и установлены между деталью 133, которая поддерживает ось левого колеса 126, и салазками 42. Штанги 44 и 46 точно так же установлены между деталью 133, составляющей одно целое с осью правого колеса 126, и салазками 42.
Кроме того, для поддержания на заданном расстоянии от рамы 122 штанга 43 соединена с втулкой 60, установленной с возможностью поворота вокруг вертикальной оси на опорной стойке 62, составляющей одно целое со штангами 124, соответствующими левому колесу 126. В процессе рулевого управления штанга 43 может проходить внутри втулки 60.
Точно так же штанга 44 соединена с втулкой 61, установленной с возможностью поворота на опорной стойке 63, составляющей единое целое со штангами 124, соответствующими правому колесу.
Штанги 43 и 44 соединены с деталями 133 на соответствующем расстоянии от оси вертикального шарнира, соединяющего эти детали с опорными стойками 123, для обеспечения требуемого поворота колес, совершаемого при повороте салазок 42, как показано на фиг.8.
В случае когда доска находится в опущенном рабочем положении, штанги 45 и 46 почти выровнены со штангами 43 и 44. При повороте рукоятки 114a салазки 42, удерживаемые в своем крайнем положении посредством штанги 121, обеспечивают поворот колес 126.
В случае когда доска находится в поднятом нерабочем положении, штанги 45 и 46 располагаются под углом к штангам 43, 44 (см. фиг.6), а колеса 126 находятся во втянутом положении вблизи рамы 122.
Фиг.9 иллюстрирует третий вариант воплощения настоящего изобретения с рулевой системой, идентичной показанной на фиг.1-5, но с другим механизмом для выдвижения колес. Рулевые звенья обозначены ссылочными позициями, соответствующими позициям, используемым при описании первого варианта реализации, с прибавлением числа 200.
Механизм выдвижения для рулевых колес 216 включает в себя колесо 260, соединенное с возможностью поворота с рамой 222 и расположенное в плоскости, параллельной плоскости доски 213, находящейся в рабочем положении. На противоположных сторонах колеса 260 установлены две соединительные тяги 263 и 264, прикрепленные на противоположных концах к штифту 218a шарнира 218, составляющему единое целое с доской 213.
Соединительные тяги 263 и 264 намотаны на штифт 218a во взаимно противоположных направлениях так, что при опускании доски колесо 260 под действием усилия, передаваемого соединительной тягой 264, поворачивается, если смотреть сверху, по часовой стрелке, а при подъеме доски 213 колесо 260 под действием усилия, передаваемого соединительной тягой 263, поворачивается против часовой стрелки.
На колесе 260 с противоположных сторон в направлении перпендикуляра к направлению движения опорных стоек 223 для колес с помощью шарниров закреплено две штанги 261 и 262. С помощью шарниров штанги 261 и 262 прикреплены к противоположному концу подвижных штанг, поддерживающих опорные стойки 223 для двух рулевых колес 126.
Штанги 261 и 262 преобразуют поворотное движение колеса 260 в прямолинейное движение опорных стоек 223 соответственно в направлении выдвижения или втягивания в зависимости от направления поворота колеса 260 по часовой стрелке или против часовой стрелки. Таким образом, при опущенной доске 213 колеса 216 находятся в выдвинутом положении, а при поднятой доске 213 колеса 216 находятся во втянутом положении.
Направление движение штанг 261 и 262 может в случае необходимости быть любым, или эти штанги могут быть выполнены в виде тросов Боудена.
Описываемые выше конструкции позволяют сделать вывод о достижении поставленных целей.
Действительно, предложенная система выдвижения рулевых колес отвечает предъявляемым требованиям и позволяет экономить драгоценное место внутри чемодана, поскольку не требует больших углублений в корпусе чемодана для обеспечения возможности поворота колес в процессе рулевого управления.
Кроме того, легкая, эффективная и экономичная система удовлетворяет предъявляемым требованиям для реализации рулевого управления. Увеличенное расстояние между колесами позволяет также повысить устойчивость чемодана в конструкции самоката.
Разумеется, приводимое выше описание примера осуществления с применением оригинальных принципов согласно настоящему изобретению основывается на неограничивающем примере указанных принципов в рамках исключительного права, определяемого прилагаемой формулой изобретения.
Например, в чемодане, соединенном с рулевыми колесами, для обеспечения их поворота может использоваться электродвигатель.
Кроме того, рулевые колеса могут быть снабжены тормозом с возможностью управления с помощью захватов рукоятки.
На представленных фигурах шток рукоятки рулевого управления и доска установлены на противоположных сторонах чемодана, но следует понимать, что рукоятка может быть также установлена на той же стороне, к которой с помощью шарнира прикреплена доска.
Реферат
Чемодан имеет пару колес, установленных на одной стороне корпуса чемодана, и рукоятку, выступающую из корпуса чемодана на стороне, противоположной стороне, на которой установлены колеса, а также доску, которая может перемещаться между нерабочим положением, в котором она располагается вблизи корпуса чемодана, и рабочим положением, в котором она проходит от корпуса чемодана для поддерживания пользователя чемоданом. Колеса, установленные на корпусе чемодана, являются рулевыми, и между рукояткой и колесами имеется кинематическое соединение для рулевого управления. Указанные рулевые колеса установлены с возможностью перемещения между втянутым положением, в котором они находятся вблизи корпуса чемодана, и выдвинутым положением, в котором они отстоят далеко от корпуса чемодана. Обеспечивается простота и экономичность конструкции, имеющей возможность преобразования в самокат. 16 з.п. ф-лы, 9 ил.
Комментарии