Инвалидная коляска-трансформер с присоединяемым передним управляемым приводом. - RU178762U1
Код документа: RU178762U1
Чертежи

Описание
Полезная модель относится к индивидуальным колесным средствам передвижения, предназначенным для людей с ограниченными возможностями, а также к классу транспортных средств, имеющих колесный движитель с различным расположением колес относительно опорной поверхности. Возможное преимущественное использование патентуемой инвалидной коляски - как активной настраиваемой коляски или в спорте для людей с ограниченными возможностями, в пара-спорте.
Пояснения терминов, сокращения.
- Транспортное средство – (далее - ТС).
- Инвалидная коляска (далее - ИК) относится к ТС для людей с ограниченными возможностями (престарелых, ослабленных, больных, инвалидов и др.).
- В заявке также рассматривается работа колесного движителя в составе ИК и ее движение по опорной поверхности (далее - ОП), которую мы рассматриваем как твердую горизонтальную плоскость земли, асфальта. Хотя такое рассмотрение можно распространить на другие виды поверхности: криволинейную, наклонную, со случайными неровностями, диспергированную и т.д.
Так как в предлагаемой полезной модели существенно изменен колесный движитель ИК, по сравнению с движителями известных колясок, рассмотрим в качестве аналога полезной модели известный движитель ТС, имеющий характеристики, схожие с характеристиками движителя, входящего в состав патентуемой ИК.
Известен шагающий движитель ТС (см. патент РФ №2513348, от 04.03.2013 г.), содержащий два одинаковых механических тракта, каждый из которых выполнен в виде пары одинаковых дисков, расположенных на концах одной неподвижной оси, между дисками на осях установлены опоры. При этом неподвижные оси трактов соединены муфтами с коленчатой неподвижной осью, на которой установлен дополнительный диск с коленчатыми осями, соединенными муфтами с осями опор. При этом каждая пара концевых дисков в движителе выполняет роль одного целого колеса, контактирующего с ОП (с землей) при его движении. Также движитель содержит рычаг управления поворотом опор относительно земли на угол 90°. В одном положении рычага опоры на дисках упираются в землю, а в другом положении - размещены без контакта с землей, вдоль нее.
На самом деле, когда опоры упираются в землю, ход колеса движителя напоминает ход зубчатого колеса по земле с опорой на зубья, а когда опоры параллельны земле, то движитель превращается в обычный колесный.
Недостатки аналога. В конструкции данного шагающего движителя ТС не предусмотрена возможность изменения ширины поперечной базы движителя и колейности при взаимодействии колес с ОП, по сравнению с заявляемой конструкцией. Тем более не идет речи о торможении ТС путем изменения расположения колес, как это предложено в заявляемой конструкции. Таким образом, при внешней схожести некоторых элементов конструкции и переключения режимов, сравниваемые движители решают различные задачи и используют при этом различающиеся способы их осуществления.
Известны различные типы ИК (см. например, https://ru.wikipedia.org/wiki/Инвалидная_коляска - Википедия: «Инвалидная коляска»). На сайте: http://www.dobrota.ru/page/page63.html - представлен обзор многих типов ИК с примерами и изображениями.
Ниже представлено описание базовой ИК с вариантами исполнения, составленное по указанным источникам.
Стандартная ИК содержит раму, элементы которой составляют основу кресла с сиденьем, спинкой, поручнями, с подлокотниками, элементами поддержки ног и/или с элементами амортизации для пользователя.
На раме закреплен колесный движитель в виде пары одинаковых приводных колес с возможностью вращения каждого колеса вокруг оси, совпадающей с осью своего «колесного» вала и с возможностью преобразования вращательного движения этих колес в поступательное движение указанной ИК или обратного преобразования при контакте указанных колес с ОП. В движителе стандартной ИК оси ее указанных колесных валов закреплены на раме так, чтобы приводные колеса находились по бокам снаружи рамы, каждое в плоскости, близкой к вертикальной.
В аналогах ручной привод ИК в движение, в большинстве случаев, осуществляется с использованием пары дополнительных ободов меньшего радиуса, чем основные, жестко закрепленных на колесах, соосно с их основными ободами. Пользователь кистями рук двигает верхнюю часть обода колес, набирая обороты, и этим обеспечивает ход коляски в необходимом направлении. Кроме указанного, имеются и другие конструкции и способы ручного или ножного мускульного привода коляски в движение (рычажный, цепной или с зубчатой передачей на колеса и т.п.).
Кроме того, обычно ИК имеет на раме пару одинаковых поворотных колес спереди по бокам коляски, с возможностью их вращения, а также поворота их осей вращения в плоскости, параллельной ОП. При этом валы поворота оси поворотных колес обычно закреплены на раме так, чтобы линия оси каждого вала поворота соответствующего поворотного колеса была смещена на одинаковое относительно центра этого колеса.
Также в конструкции ИК обычно предусмотрено наличие элементов узла ее торможения, который может приводиться в действие как самим пользователем, так и персоналом, помогающим инвалиду передвигаться на коляске и останавливаться.
Кроме того, в некоторых ИК предусмотрено использование узла моторного привода коляски в движение в дополнение к мускульному или только моторного.
При этом конструкция собственно рамы и элементов ИК, в том числе, размещения движителя - приводных колес, а также поворотных колес, близка к симметричной относительно продольной плоскости коляски, перпендикулярной ОП.
Также в ряде конструкций имеется возможность присоединения-закрепления к раме коляски и отсоединения от нее узла переднего управляемого привода, так называемой велоприставки (например, с ручным, ножным и/или моторным приводом), см., например, http://www.freeway.by/o-bezbarernoy-srede/kataloq-izdeliy-i-uslug/invalidnye-kolyaski.php или http://etracab.ru/forum/viewtopic.php?id=899.
Особенности конструкции конкретной велоприставки и ее крепления к инвалидной коляске соответствуют конструкции этой коляски и потребностям ее пользователя.
Обычным в конструкции велоприставки с ручным приводом является такой ее состав. Основой велоприставки является поворотная стойка-вал, в верхней части которой жестко закреплен ручной привод в виде коленчатой конструкции рычагов для вращения их руками пользователя. Нижняя часть вала обычно жестко соединена с вилкой, в которой установлено ведущее и одновременно поворотное колесо, с возможностью вращения вокруг своей оси для привода конструкции (приставки и коляски) в движение. Указанный вал установлен и связан с элементами крепления велоприставки к ИК (через специальную обойму вала или через посадочные подшипники) с возможностью поворота вала и своего колеса для изменения направления движения коляски. Передача усилия вращения коленчатых рычагов на привод колеса в движение осуществляется обычно с помощью звездочки и цепной передачи на звездочку и ступицу колеса велоприставки. Имеются элементы крепления велоприставки к ИК, на которой должны быть предусмотрены ответные элементы крепления.
Велоприставка скрепляется с ИК в жесткую конструкцию с возможностью отсоединения. Обычно имеется от 2-х до 5-ти мест/точек соединения приставки с коляской. При этом в закрепленном состоянии вал велоприставки наклонен верхней частью к пользователю ИК и отодвинут от коляски, для обеспечения комфортного размещения пользователя в конструкции приставка-коляска и управления ею. При этом для эффективного использования приводного-поворотного колеса велоприставки, в момент ее присоединения к коляске и закрепления, переднюю часть ИК поднимают так, чтобы передние поворотные колеса коляски не мешали движению.
Кроме того, практически всегда в состав велоприставки входит узел ручного торможения колеса приставки, возможны другие конструкционные опции: переключатель скоростей, световые сигналы и т.д.
Так как в данной заявке патентуется именно инвалидная коляска (ИК) с новым движителем, то признаки указанной коляски, относящиеся к велоприставке, такие как элементы крепления ИК к велоприставке, считаются известными, несущественными и не патентуются. Также не патентуется сама велоприставка.
Недостатки вышеперечисленных аналогов-ИК будут отмечены ниже при анализе недостатков прототипа.
Из вышеуказанных аналогов более близкими к патентуемой ИК являются активные ИК и спортивные ИК.
Активные коляски. За счет гибкой системы регулировок (количество которых доходит до 40) активную коляску можно настроить с учетом индивидуальных особенностей конкретного человека: роста, веса, конституции тела, ограничения двигательной функции. Активные коляски предназначены для людей с инвалидностью, которые ведут активный образ жизни, много и часто передвигаются, хотят иметь максимум мобильности и маневренности.
Спортивные коляски. Спортивные коляски предназначены для занятия профессиональным спортом, в том числе гонками, и танцами. Подобные коляски изготавливаются на заказ с учетом всех особенностей планируемой эксплуатации. При этом используются особо прочные материалы, способные выдержать экстремальные спортивные нагрузки.
Спортивные ИК весят намного меньше стандартных базовых колясок (8-14,5 кг). Подобная легкость достигается за счет рамы из особых легких сплавов, уменьшенного диаметра передних колес, специально смоделированной спинки и минимальных подлокотников.
Спортивная коляска, которая принята за прототип полезной модели (см., например, http://www.supporting.su/otzyvy/kakie_byvayut_invalidnye_kolyaski), имеет те же элементы, что и другие коляски: раму в виде кресла с соответствующими аксессуарами, приводной движитель в виде пары приводных колес, пару поворотных колес, возможную систему торможения.
Дополнительной особенностью спортивной коляски, по сравнению с рассмотренными выше аналогами, при тех же остальных параметрах, является то, что в приводном движителе спортивной ИК, оси указанных колесных валов, для повышения устойчивости, наклонены относительно продольной плоскости симметрии коляски так, что приводные колеса наклонены верхней частью друг к другу и к этой плоскости, при этом оставаясь размещенными снаружи по бокам коляски. Здесь, как и в других аналогах, ручной привод коляски в движение осуществляется с использованием пары дополнительных ободов меньшего радиуса, чем основные обода, жестко закрепленных на приводных колесах, соосно с их основными ободами. Имеется возможность использования спортивной ИК после присоединения/прикрепления ее к велоприставке.
Главным недостатком известных ИК, в том числе и спортивной коляски-прототипа, по сравнению с коляской с новым патентуемым движителем является тот факт, что известная коляска имеет неизменную 2х колейную (4х колесную) схему или также неизменную 3х колейную (3х колесную) схему, изначально заложенную в конструкцию коляски или полученную, путем прикрепления велоприставки. Таким образом, у известных ИК нет возможности мобильного изменения схемы колейности на ходу, что не позволяет активному пользователю использовать возможности маневрирования в условиях стесненности, изменения скорости и торможения «косым следом» по сравнению, например, с коляской с новым патентуемым движителем, в которой указанные изменения режима движения можно осуществить единственной рукояткой управления поворотом коленвала.
Особенно этот недостаток проявляется при использовании спортивной ИК вместе с велоприставкой. Основная задача пользователя спортивной инвалидной велоколяски (ИК) как раз и заключается в увеличении скорости, маневренности и подвижности коляски в процессе движения. В этом случае, невозможность (для известной коляски) мобильного переключения колейности с трехколейной устойчивой схемы на практически одноколейную линейную схему в процессе скоростного движения коляски, и обратно, является серьезным препятствием увеличения ее мобильности.
Пояснения терминов (продолжение) к техническому решению описанному ниже.
- Коленчатый вал (далее пишем - коленвал).
- Когда пишем о материальном компоненте конструкции коленвала и составляющих его элементов, то пользуемся термином «вал», а когда пишем о повороте, вращательном движении этих материальных элементов (валов или всего коленвала) вокруг оси или о геометрических понятиях, то пользуемся термином «ось». При этом в некоторых случаях понятие «вал» может совпадать по смыслу с понятием «ось».
- В патентуемой ИК колесами движителя являются ведущие колеса, размеры которых в большинстве колясок обычно значительно больше, чем размеры поворотных колес. Поэтому при дальнейшем рассмотрении геометрии расположения и конструкции колес коляски имеются ввиду именно колеса движителя ИК, если не записано иное.
- Далее используется понятие «геометрический центр колеса ИК», которое относится к каждому из пары указанных ведущих колес. Условно можно считать, что геометрический центр колеса ИК - это центр той окружности колеса, которая взаимодействует с ОП, он близок к центру окружности колеса наибольшего радиуса и расположен на оси его вращения.
Имеем следующий технический результат заявляемой ИК-трансформера при индивидуальном использовании (без велоприставки).
- Использование нового движителя ИК позволяет пользователю двигаться в различных режимах (см. ниже: режим а, б или в), путем переключения этих режимов одной ручкой «управления поворотом коленвала» (при этом коленвал поворачивается вокруг оси, которая перпендикулярна продольной плоскости коляски, которая, в свою очередь, перпендикулярна ОП).
- Режим а. Повернув указанной ручкой коленвал так, чтобы точки/зоны контакта колес ИК с ОП были размещены максимально широко, пользователь обеспечит режим устойчивого движения коляски (четырех точечный контакт всех колес коляски с ОП).
Фактически режим а патентуемой ИК соответствует состоянию колесной базы известной стандартной ИК (как спортивной, так и других типов).
Этот устойчивый режим удобен пользователю на стоянке, при остановке, в начале и при малых скоростях движения ИК. При этом устойчивость ИК будет тем больше, чем ниже находится ось поворота коленвала от указанной линии центров колес.
- Режим б. Повернув указанной ручкой коленвал так, чтобы точки/зоны контакта колес с ОП наоборот были сдвинуты на минимальную ширину, будет обеспечен другой режим движения коляски (близкий к трех точечному контакту всех колес коляски с ОП), позволяющий значительно увеличить мобильность коляски: повороты в стесненных условиях и возможность движения с повышенной скоростью.
- Режим в. Повернув указанной ручкой коленвал так, чтобы точки/зоны контакта колес с ОП находились на расстоянии друг от друга в некотором промежуточном значении между максимумом и минимумом, можно обеспечить режим торможения коляски «косым следом» (когда след каждого колеса расположен под углом к направлению движения коляски), с необходимым усилием торможения, который зависит от значения угла поворота коленвала относительно вертикали.
При присоединении ИК к велоприставке малые поворотные колеса приподняты над ОП и не касаются ее.
В случае использования ИК в комплекте с присоединенной велоприставкой технический результат заключается в следующем.
- В комплексе ИК-велоприставка при соответствующем угловом положении коленвала ИК (когда ручкой управления поворотом коленвала положение колес на «колесных» валах/осях коленвала установлено так, что следы указанных колес на ОП раздвинуты на максимальную ширину) образуется (основная, базовая) трехточечная схема контакта колес с ОП (а именно, режим а движения ИК: два контакта ведущих колес ИК, максимально раздвинутых у ОП, и один контакт колеса велоприставки, это колесо тоже может быть ведущим). Режим движения а удобен в начале движения и при малых скоростях движения коляски.
- После разгона ИК и поворота ручки управления поворотом коленвала, чтобы установить угловое положение коленвала на 180° от положения, относительно режима а, колеса ИК установлены так, что их следы на ОП сближены на минимальное расстояние, образуется режим движения 6 (что соответствует контакту колес комплекса ИК-велоприставка, близкому к двух точечному, на линейной траектории).
- Преимущество узкой поперечной базы ИК, как индивидуальной, так и в комплекте с велопритставкой, в маневренности и послушности коляски в движении при управлении пользователем. А также в возможности задать ей более высокую скорость движения при той же или меньшей затрачиваемой энергии, мощности. При этом, в отличие от предыдущего режима, центр тяжести ИК соответственно поднимается.
- Также конструкция заявляемой ИК позволяет, движением той же рукоятки управления поворотом коленвала, переключать режим движения коляски с одного из вышеуказанных режимов (а или б) качения ИК в режим (в) ее торможения так называемым «косым следом колес» или обратно в режим а или б. При этом выбор пользователем положения коленвала под заданным углом поворота к вертикали (или к раме коляски) позволяет задавать фиксированную ширину поперечной и продольной базы колес коляски (в пределах диапазона от максимальной до минимальной ширины), величину и направление угла наклона следа колес к направлению движения коляски (что определяет усилие и особенности ее торможения при регулировании рукояткой плавно или дискретно), а также соответствующие изменяемый клиренс, высоту центра тяжести и длину продольной опорной колесной базы ИК.
- В итоге при незначительном усложнении конструкции колесного движителя ИК значительно улучшаются такие характеристики ИК, как мобильность, энергетическая эффективность для пользователя, удобство использования и возможность повышения скорости ИК, а также возможность упрощенного переключения режимов движения в разных условиях и торможения ИК. В том числе при использовании комплекса ИК-велоприставка.
Хотя преимущества полезной модели наиболее проявляются в активных и спортивных ИК, предлагаемый колесный движитель можно использовать во многих известных типах ИК (базовых, детских, моторизованных и других), в том числе, с присоединенной велоприставкой.
Указанный технический результат достигается в ИК с присоединяемым передним управляемым приводом - велоприставкой, содержащей
раму, элементы которой составляют основу кресла с сиденьем, спинкой, поручнями и элементами поддержки ног,
элементы торможения движения коляски,
закрепленный на раме приводной колесный движитель, в виде пары одинаковых приводных колес, с возможностью вращения каждого колеса вокруг оси, совпадающей с осью «колесного» вала, на котором оно закреплено, и преобразования вращательного движения этих колес в поступательное движение указанной ИК или обратного преобразования при контакте указанных колес с ОП, при этом в составе движителя ИК имеются дополнительные элементы для ручного привода коляски в движение,
при этом оси парных колесных валов движителя и насаженные на них колеса имеют заданный наклон под углом друг к другу,
пару одинаковых поворотных колес, с возможностью их вращения, а также поворота их осей вращения в плоскости, параллельной ОП,
при этом конструкция рамы и элементов ИК, в том числе, движителя с приводными колесами, а также поворотных колес, близка к симметричной относительно продольной срединной плоскости коляски, перпендикулярной ОП,
а места присоединения ИК к велоприставке размещены так, чтобы при указанном присоединении поворотные колеса коляски были приподняты над ОП и не мешали ее движению,
отличающейся тем, что указанная ИК является конструкцией-трансформером, в которой собственный приводной движитель коляски содержит коленвал, состоящий из выполненных как одно целое, участков, из которых один участок является средним валом/осью, а два участка являются парой вышеуказанных взаимно наклоненных колесных валов/осей,
причем указанные оси коленвала лежат в одной плоскости - в плоскости коленвала, при этом ось среднего вала параллельна отрезку прямой, соединяющему центры колес движителя, и при этом, благодаря взаимному наклону своих колесных осей, колеса движителя также наклонены зеркально симметрично одно к другому под заданным углом с локальным сближением края колес, и с уменьшенным расстоянием в этом месте между ними, вплоть до возможного контакта, так, что диаметры колес в плоскости коленвала образуют стороны воображаемой «буквы А», а отрезок прямой, соединяющей центры колес, образует перекладину указанной «буквы А», также расположенную в плоскости коленвала,
при этом указанный коленвал закреплен на раме ИК с возможностью поворота плоскости коленвала на заданный угол вокруг своей оси, совпадающей с осью среднего вала, и фиксации его относительно рамы ИК с помощью конструктивных элементов, поддерживающих указанный поворот коленвала,
при этом для поворота и фиксации углового положения коленвала относительно рамы ИК использованы пассивные и/или активные элементы управления поворотом коленвала.
В частности, в ИК дополнительными элементами для ручного привода коляски в движение являются два одинаковых обода, каждый из которых закреплен соосно с одним из приводных колес коляски, с радиусом дополнительного обода меньшим, чем радиус обода соответствующего приводного колеса.
В частности, в ИК ось поворота коленвала находится в параксиальной близости к отрезку прямой, соединяющему центры колес движителя.
В частности, в ИК конструктивными элементами, поддерживающими поворот коленвала вокруг своей оси, являются подшипники или шарниры.
В частности, в ИК элементом управления поворотом коленвала является ручка или рукоятка, поворачивая которую пользователь ИК осуществляет поворот коленвала.
В частности, в ИК элементами управления поворотом коленвала являются элементы передачи усилия на поворот коленвала, обгонный, храповой механизм с переключателем направления поворота коленвала, а также элементы фиксации угла поворота коленвала относительно рамы инвалидной коляски.
В частности, в ИК элементы управления поворотом коленвала скомпонованы в узел управления поворотом коленвала.
В частности, в ИК угол поворота коленвала вокруг оси поворота относительно рамы ИК имеет значения до ±360° и более.
В частности, в ИК угол поворота коленвала вокруг оси поворота относительно рамы ИК имеет значения меньшие, чем полный оборот на угловой размер неподвижных элементов коляски, препятствующих обороту коленвала с колесами.
В частности, в ИК одно колесо или каждое из пары колес движителя ИК выполнено в виде мотор-колеса с электродвигателем.
Полезная модель поясняется примером, который иллюстрируется фигурами 1-6.
Фиг. 1. Показан упрощенный чертеж инвалидной коляски (ИК) с присоединенной к ней велоприставкой (вид сбоку).
Фиг. 2. Та же коляска, что на фиг. 1 (вид сзади). Коленвал повернут в такое положение, при котором следы на ОП колес ИК находятся на максимальном расстоянии друг от друга. Для ясности изображения велоприставка, присоединенная к коляске, не показана.
Фиг. 3. Та же коляска, что на фиг. 1 (вид сзади). Коленвал повернут в такое положение, при котором следы на ОП колес ИК находятся на минимальном расстоянии друг от друга. Велоприставка, присоединенная к коляске, не показана.
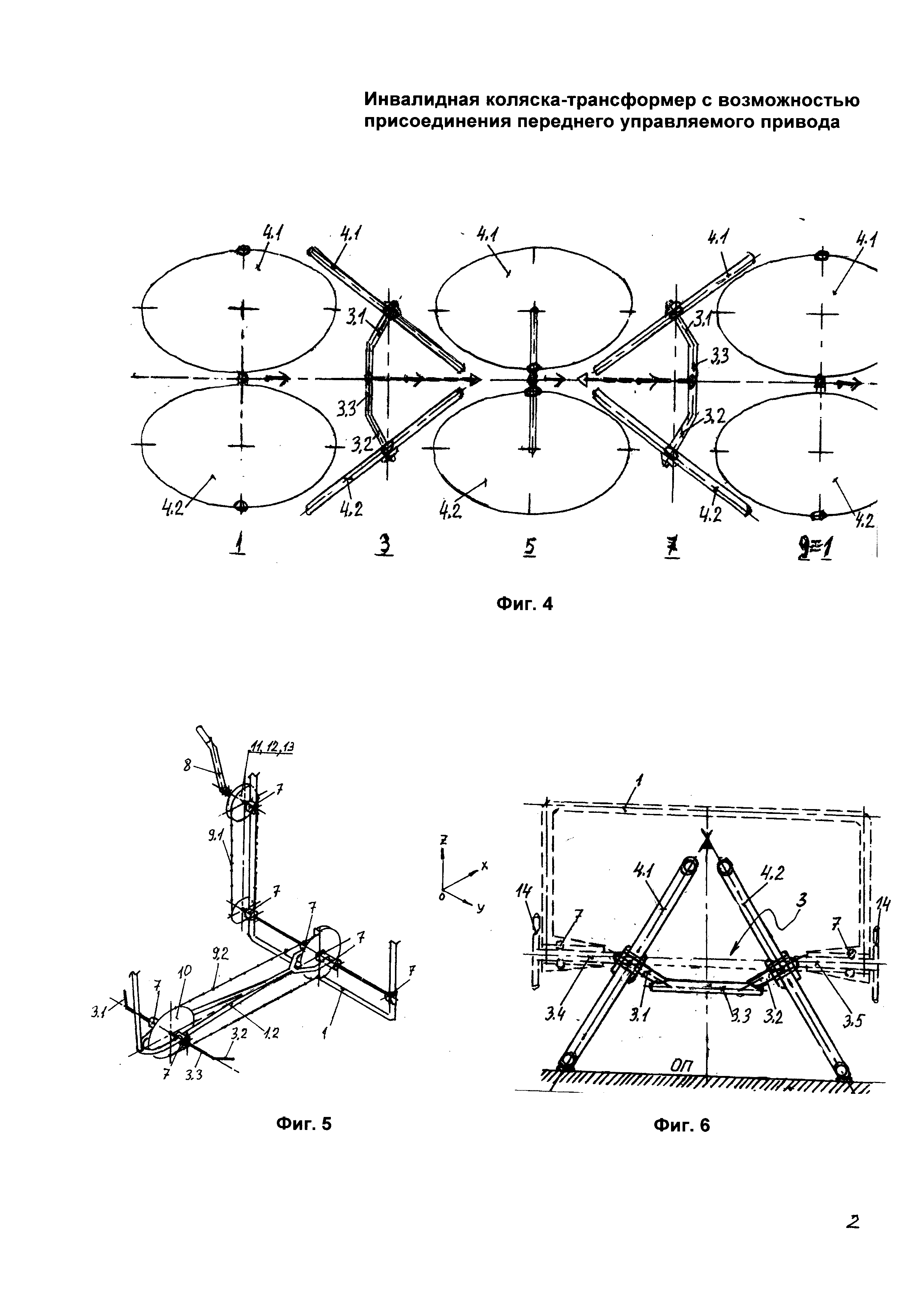
Фиг. 4. На виде сверху показаны положения среднего вала, колесных валов коленвала и колес движителя ИК, при различных угловых положениях коленвала относительно вертикали к ОП (см. пояснения в описании примера).
(Обозначения:
знак Δ - точка/зона максимального сближения колес движителя 4.1, 4.2, то же, что вершина воображаемой «буквы А»;
-->- вектор направления движения ТС;
О.П. - опорная поверхность;
= - обозначение следа каждого колеса в момент контакта с ОП).
Фиг. 5. Схематически показан узел управления поворотом коленвала (аксонометрическая проекция).
Фиг. 6. Возможность крепления коленвала к раме ИК снаружи колес (при этом звездочка 10 и траверса 1.2 не используются).
В качестве примера рассмотрим ИК спортивного типа с уже присоединенным к ней передним управляемым приводом - велоприставкой. Коляска (см. фиг. 1-3) содержит раму 1, элементы которой составляют основу кресла с сиденьем, спинкой, поручнями, с возможными подлокотниками, элементами амортизации для пользователя и поддержки ног. Собственный приводной колесный движитель 2 ИК, закрепленный на раме 1 под сиденьем 1.1, содержит коленвал 3, состоящий из жестко скрепленных или выполненных как одно целое, участков, из которых
два участка 3.1, 3.2 являются парой взаимно наклоненных «колесных» валов/осей, на каждом из валов закреплено по одинаковому приводному колесу 4.1, 4.2, с возможностью его вращения вокруг оси, совпадающей с осью своего колесного вала 3.1, 3.2, и один участок коленвала 3 является средним валом/осью 3.3, причем указанные оси коленвала лежат в одной плоскости - в плоскости коленвала 3.
При этом оси парных колесных валов 3.1, 3.2 коленвала движителя и насаженные на них колеса 4.1, 4.2 имеют заданный наклон под углом друг к другу симметрично относительно срединной продольной плоскости ИК, перпендикулярной к ОП.
При этом для ручного привода коляски в движение на каждом приводном колесе коляски возможно жесткое закрепление одинакового дополнительного обода 5.1, 5.2 меньшего радиуса, чем основной обод соответствующего колеса 4.1, 4.2, соосно с ним.
Кроме того, в дополнение к имеющимся валам, в составе коленвала возможно наличие двух концевых участков, в виде концевых валов 3.4, 3.5 с одной общей осью, которая также лежит в плоскости коленвала 3 (валы показаны пунктиром на фиг. 6).
Также ИК содержит пару одинаковых поворотных колес 6.1, 6.2, с возможностью их вращения, а также поворота их осей вращения в плоскости, параллельной ОП, при этом каждый вал 6.3, 6.4 поворота оси каждого из поворотных колес закреплен на раме 1 коляски так, что ось поворота этого вала 6.3, 6.4 смещена на одинаковое расстояние относительно центра соответствующего поворотного колеса 6.1, 6.2.
Причем конструкция рамы и элементов ИК, в том числе, собственного движителя 2 с приводными колесами 4.1, 4.2, а также поворотных колес 6.1, 6.2, близка к симметричной относительно продольной срединной плоскости коляски, перпендикулярной ОП.
В конструкции ИК имеются элементы узла ее торможения (на фигурах не показаны).
Особенностью движителя 2 патентуемой ИК является то, что приводные колеса 4.1, 4.2, закрепленные на колесных валах 3.1, 3.2, наклонены одно к другому с локальным сближением края указанных колес, и с уменьшенным расстоянием в этом месте между ними, вплоть до возможного контакта, так, что диаметры колес 4.1, 4.2 в плоскости коленвала 3 образуют стороны воображаемой «буквы А», а отрезок прямой, соединяющей центры колес, образует перекладину указанной «буквы А», также расположенную в плоскости коленвала 3.
При этом указанный коленвал 3 закреплен на раме 1 ИК с возможностью поворота своей плоскости на заданный угол и фиксации его относительно рамы 1 ИК вокруг оси поворота коленвала 3, которая в данном случае совпадает с осью среднего вала 3.3, находится в параксиальной близости к отрезку прямой, соединяющему центры колес движителя, а участки вала/валов, оси которых совпадают с указанной осью поворота коленвала 3, закреплены на раме 1 ИК с помощью шарниров, подшипников 7 и/или других конструктивных элементов, поддерживающих указанный поворот коленвала 3 на заданный угол.
При этом поворот и фиксация углового положения коленвала 3 относительно рамы 1 ИК осуществляется вручную с использованием элементов управления поворотом коленвала, скомпонованным в одноименный узел (пример конструктивного исполнения узла управления поворотом коленвала 3 показан на фиг. 5 в аксонометрической проекции). Такими элементами являются: рукоятка 8, связанная с ней цепная передача 9 (два звена: цепь 9.1 и цепь 9.2) на звездочку 10, соосно закрепленную в середине среднего вала 3.3 коленвала 3, и механизм 11 фиксации углового положения коленвала 3 относительно рамы 1 ИК, а также звено 12 храпового/затяжного механизма с возможностью переключения направления воздействия рукоятки 8 на звездочку 9 среднего вала. 3.3. Здесь в качестве элемента рамы 1, поддерживающего передачу управления от рукоятки 8 к звездочке 10 используется добавочная траверса 1.2. В данном примере указанный механизм 11 фиксации положения и храповой/затяжной механизм 12 установлены на другую звездочку 13, непосредственно у рукоятки 8 узла управления поворотом коленвала 3. При этом поворот и фиксация углового положения коленвала 3 относительно рамы 1 ИК может осуществляться также с использованием других пассивных и/или активных элементов управления поворотом коленвала 3.
Для поддержки поворота коленвала 3 относительно рамы 1 ИК можно использовать концевые валы 3.4, 3.5, (см. фиг. 6) при этом ось поворота коленвала 3 совпадает с общей осью концевых валов 3.4, 3.5, которые закрепляются в подшипниках 7 к раме 1 снаружи колес 4.1, 4.2, и при этом звездочка 14, на которую передается усилие от рукоятки 8 управления поворотом коленвала 3, также закрепляется на одном или на обоих из концевых валов 3.4 и/или 3.5 снаружи колес 4.1, 4.2, а не на среднем вале 3.3 коленвала 3.
Спереди к ИК прикреплен передний управляемый привод ИК в движение (это - так называемая велоприставка 15), в данном случае (см. фиг. 1) - привод ручной 16, хотя может быть и ножной и/или моторный, например, в виде электрического мотор-колеса. В состав велоприставки 15 входит поворотное колесо, оно же приводное колесо 17.
Присоединение и закрепление велоприставки 15 к ИК осуществляют с помощью соединительных элементов 18. При этом поворотные колеса 6.1, 6.2 ИК приподнимают над ОП, чтобы они не мешали движению комплекса ИК-велоприставка.
Описание работы ИК без велоприставки. Пользователь осуществляет привод ИК в движение, поворачивая руками дополнительные обода 5.1, 5.2 на приводных колесах 4.1, 4.2.
Обычно начальным положением движителя 2 ИК является такое (начальное) угловое положение коленвала 3 (см. фиг. 2), в котором точки/зоны контакта колес 4.1 и 4.2 ИК с ОП размещены максимально широко. При движении ИК в этом режиме (обозначим как режим а) имеем 4-х точечный контакт колес 4.1, 4.2 движителя 2 и поворотных колес 6.1, 6.2 коляски с ОП, близкий к состоянию колесной базы известной стандартной ИК (как спортивной, так и других типов). При этом буква А, составленная из диаметров колес 4.1, 4.2 и отрезка прямой, соединяющего центры этих колес, расположена в плоскости коленвала 3 вертикально, вершиной вверх.
Этот устойчивый режим удобен пользователю на стоянке, при остановке, в начале и при малых скоростях движения ИК. При этом устойчивость ИК будет тем больше, чем ниже находится ось поворота коленвала 3 от указанной линии центров колес и шире поперечная колесная база.
Для увеличения скорости движения и увеличения маневренности ИК пользователь рукояткой 8 управления поворотом коленвала 3 поворачивает коленвал 3 вокруг оси поворота на 180° так, чтобы диаметры колес 4.1, 4.2 и отрезок, соединяющий их центры образовывали букву А, перевернутую вершиной вниз относительно ОП (см. фиг. 3).
При этом, если поворот коленвала 3 рукояткой 8 осуществляется на угол, меньший требуемого (например, на угол, меньше, чем 180°), то храповой/затяжной механизм 12 (с переключателем направления поворота коленвала 3) обеспечивает возможность последовательного изменения угла поворота коленвала 3, до необходимого значения в заданную сторону, а механизм 11 фиксации задает стационарное фиксированное угловое положение коленвала 3 относительно рамы 1 ИК.
При этом в данном режиме движения (который обозначим как режим б) точки/зоны контакта колес 4.1, 4.2 ИК с ОП размещены на минимальном расстоянии друг от друга (т.е. минимальная поперечная база, близкая к одноколейному качению колес движителя 2). Благодаря этому повышается мобильность коляски: обеспечиваются повороты в стесненных условиях и возможность движения с повышенной скоростью.
Торможение ИК осуществляется с помощью колес 4.1, 4.2 движителя 2, выставленных в некое промежуточное положение (путем поворота коленвала 3 указанной рукояткой 8 на соответствующий промежуточный угол), по сравнению с положением колес 4.1, 4.2 в режимах движения а и 6 (обозначим такой режим торможения, как режим в). При этом, в зависимости от конкретного значения угла поворота коленвала 3, устанавливается соответствующий угол между продольными отрезками следа колес 4.1,4.2 и определяется усилие торможения ИК.
Так как при этом след каждого колеса 4.1, 4.2 расположен под углом к направлению движения коляски, то такой режим в называется «режимом торможения косым следом». Если вершина угла, образованного продольными отрезками следа колес 4.1, 4.2, совпадает с направлением движения ИК, то такое торможение называется «торможением плугом», а если направлена в противоположную сторону, то - «торможением якорем».
На фиг. 4 (вид на движитель ИК сверху) показаны ряд угловых положений коленвала 3 относительно вертикального луча (так называемого «начального луча») вверх от ОП, выпущенного из средней точки среднего вала 3.3, соответствующих положений колес 4.1, 4.2 движителя и областей контакта этих колес с ОП. При этом в положении:
1 угол поворота коленвала равен 0°, имеем режим качения а;
3 - 90°, - режим торможения в «плугом»;
5 - 180°, - режим качения б;
7 - 270°, - режим торможения в «якорем»;
9 совпадает с 1 - 360°/0°, - режим качения а.
В результате присоединения/закрепления велоприставки 15 к ИК и при соответствующем угловом положении коленвала 3 в режиме качения а, следы указанных колес 4.1, 4.2 на ОП раздвинуты на максимальную ширину, при этом образуется (начальная, базовая) трехточечная схема контакта колес с ОП: два колеса 4.1, 4.2 собственного движителя 2 ИК и колесо 17 велоприставки. Колесо 17 велоприставки функционально является ведущим колесом привода. Данный режим удобен пользователю на стоянке, при остановке, в начале и при малых скоростях движения комплекса ИК-велоприставка.
После разгона комплекса, поворота ручки 8 управления поворотом коленвала 3, и соответствующего поворота коленвала 3 на 180° от положения, относительно режима а, колеса 4.1, 4.2 ИК установлены так, что их следы на ОП сближены на минимальное расстояние, образуется режим движения 6 (что соответствует контакту колес 4.1, 4.2 комплекса ИК-велоприставка, близкому к двух точечному, на линейной траектории). При этом значительно увеличивается маневренность и послушность комплекса ИК-велоприставка в движении при управлении пользователем. А также в возможности задать ему более высокую скорость движения при той же или меньшей затрачиваемой энергии, мощности.
Пользуясь той же рукояткой 8 управления поворотом коленвала 3, можно перевести комплекс ИК-велоприставка в режим в торможения «косым следом», при этом удобное управление поворотом комплекса, по сравнению с изолированной ИК, позволяет лучше обеспечить ее устойчивость при торможении.
Реферат
Инвалидная коляска (далее: ИК)-трансформер относится к индивидуальным колесным средствам передвижения, предназначенным для людей с ограниченными возможностями. Приводные колеса, закрепленные на колесных валах в составе коленвала, наклонены одно к другому с локальным сближением своего края и с уменьшенным расстоянием в этом месте между колесами вплоть до возможного контакта, так что диаметры колес в плоскости коленвала образуют стороны воображаемой «буквы А», а отрезок прямой, соединяющей центры колес, образует перекладину указанной «буквы А». Указанный коленвал закреплен на раме ИК с возможностью поворота плоскости вокруг оси, которая в данном случае совпадает с осью среднего вала, на заданный угол и фиксации его относительно рамы ИК. А концы среднего вала закреплены на раме ИК с помощью подшипников. Для поворота и фиксации коленвала относительно рамы ИК используются элементы управления поворотом коленвала: рукоятка, цепная передача на звездочку, механизм фиксации углового положения коленвала относительно рамы ИК и храповой/затяжной механизм с переключением направления воздействия рукоятки на звездочку среднего вала. В начальном угловом положении коленвала точки/зоны контакта колес ИК с ОП размещены максимально широко, при этом обеспечивается режим устойчивого движения коляски, как в колесной базе стандартной ИК - спортивной или других типов. Режим удобен на стоянке, при остановке, в начале и при малых скоростях движения ИК. Повернув коленвал на 180° относительно начального положения так, чтобы точки/зоны контакта колес с ОП были сдвинуты на минимальную ширину, получим режим движения с минимально узкой поперечной базой. Он позволяет значительно увеличить мобильность коляски: повороты в стесненных условиях и возможность движения с повышенной скоростью. Если в этом режиме движения к ИК прикреплен передний управляемый привод - велоприставка (что соответствует контакту колес комплекса ИК - велоприставка, близкому к двухточечному, на линейной траектории), то можно задать ей еще более высокую скорость движения при той же или меньшей затрачиваемой энергии, мощности. Повернув коленвал в промежуточное положение по сравнению с двумя предыдущими режимами, получим режим торможения ИК «косым следом» колес (след каждого колеса расположен под углом к направлению движения коляски) с необходимым усилием торможения, который зависит от значения угла поворота коленвала относительно вертикали. В итоге при незначительном усложнении конструкции колесного движителя ИК значительно улучшаются такие характеристики ИК, как мобильность, энергетическая эффективность, удобство использования и возможность повышения скорости ИК, а также возможность упрощенного переключения режимов движения и торможения ИК. То же при использовании комплекса ИК - велоприставка. Предлагаемый колесный движитель можно использовать во многих известных типах ИК (базовых, детских, моторизованных и других), в том числе с присоединенной велоприставкой.
Комментарии