Адаптивный цифровой фильтр для подавления нефлуктуационных помех - RU194496U1
Код документа: RU194496U1
Чертежи



Описание
Область техники, к которой относится полезная модель.
Полезная модель относится к области радиотехники и может быть использована в устройствах цифровой обработки сигналов, проходящих по каналам связи, в которых существует возможность искажения сигналов, связанных с наличием в каналах внешних нефлуктуационных помех.
Уровень техники.
Как известно, помеха - это любое воздействие, накладывающееся на полезный сигнал и затрудняющее его прием. Помехи весьма разнообразны как по своему происхождению, так и по физическим свойствам [Электронный ресурс: https://koralexand.ru/?page_id=105].
На входе приемника наряду с флуктуационной (шумовой) помехой часто присутствуют и разного рода нефлуктуационные (нешумовые, структурные) помехи, наиболее типичные из которых следующие: гармонический сигнал, сигнал с бинарной фазовой манипуляцией псевдослучайной последовательностью (ПСП-ФМ), ретранслированный сигнал [Электронный ресурс: http://www.autex.spb.su/download/dsp/dspa/dspa2003/tom1_23.pdf].
Эффективным способом борьбы с нефлуктуационными помехами в каналах связи является использование адаптивных фильтров (АФ), обычно реализуемых как нерекурсивные цифровые фильтры с регулируемыми весовыми коэффициентами (ВК), включаемых на входе демодулятора сигнала.
Элемент выходной последовательности нерекурсивного фильтра длиной N в пространстве комплексных огибающих можно записать следующим образом:

где Xi=[xi, xi-1, …xi-N+1]Т - вектор последовательности входных отсчетов;

При одинаковой структуре фильтры такого типа отличаются способами настройки вектора ВК, направленными на минимизацию заданной целевой функции.
Из уровня техники [авторское свидетельство SU 1707740 А1, опубл. 23.01.1992] известен цифровой нерекурсивный фильтр, который включает регистр задержки, семнадцать блоков регистраторов задержки, шестнадцать сумматоров и вычислитель, соединенные с соответствующей коммутацией двоичных разрядов.
Недостатком известного устройства является то, что в нем отсутствует возможность адаптации к параметрам сигнала, то есть фильтр использует изначально заданные параметры коррекции сигнала, не зависящие от изменений параметров помех.
Из уровня техники [патент RU 99623 U1, опубл. 20.11.2010] известен адаптивный фильтр сигнала, состоящий из блока вводного устройства, блока контура адаптации, блока компенсатора динамической ошибки и блока идентификатора. Блоки данного устройства, по средствам входящих в них электрических и/или электронных элементов, реализуют принцип фильтрации скалярного сообщения с блоком идентификации дисперсии случайной помехи, позволяющий компенсировать априорно неизвестный поток помех обрабатываемого сигнала, обусловленных априорно неизвестным потоком погрешностей измерений, и/или погрешностью состояния источника сигнала, и/или внешними шумами.
Недостатком известного устройства является то, что оно осуществляет фильтрацию только шумовых помех, и в нем невозможна фильтрация нефлуктуационных помех.
Из уровня техники [авторское свидетельство SU 1764145 А1, опубл. 23.09.1992] известен адаптивный фильтр, содержащий два цифровых фильтра, сумматор, пороговый блок, блок задания весовых коэффициентов, источник единичного сигнала, блок деления, служащий для выделения постоянной составляющей тока или напряжения в условиях переходного процесса.
Недостатком такого устройства является невозможность выделения переменного тока или напряжения на фоне нефлуктуационных помех.
Из уровня техники [Treichler J.R. et al. A new approach to multipath correction of constant modulus signals / IEEE Transactions on Acoustics, Speech, and Signal Processing, 1983, V. 31, N. 2, pp. 459-472] известен адаптивный фильтр, осуществляющий подавление нефлуктуационных помех, ориентированный на прием сигналов с постоянной огибающей. Он содержит первую и вторую линии задержки, состоящие из последовательно соединенных элементов задержки, перемножители выходных сигналов первой линии задержки с весовыми коэффициентами, выходы которых соединены с входами сумматора, выход которого является выходом устройства и одновременно - входом схемы адаптивной подстройки весовых коэффициентов, состоящей из блока вычисления модуля, вычитателя, блока усиления, перемножителей с выходными сигналами второго регистра и интеграторов.
В указанном устройстве для настройки вектора весовых коэффициентов нерекурсивного фильтра используется метод, реализующий процедуру:

где d - коэффициент, определяющий степень инерционности и устойчивость процесса адаптации; (⋅)* - знак комплексного сопряжения.
При этом минимизируется целевой функционал М{ƒi}, где ƒi=(|yi|2-1)2; М{⋅} - знак статистического усреднения. В результате работы АФ происходит выравнивание огибающей принимаемого процесса и, как следствие, уменьшение влияния помехи.
Недостатком этого устройства является невозможность подавления нефлуктуационных помех, имеющих, как и полезный сигнал, постоянную огибающую.
Наиболее близким по технической сущности аналогом (прототипом предлагаемой полезной модели) является адаптивный фильтр, содержащий первый и второй регистры задержки, состоящие из последовательно соединенных элементов задержки, перемножители выходных сигналов первого регистра задержки с весовыми коэффициентами, выходы которых соединены с входами сумматора, выход которого является выходом устройства и одновременно - входом контура адаптивной подстройки весовых коэффициентов, состоящего из вычитателя, блока усиления, перемножителей с выходными сигналами второго регистра задержки и интеграторов [Уидроу Б., Стирнз С. Адаптивная обработка сигналов / Пер. с англ. - М.: Радио и связь, 1989. - 440 с., рис. 1.24б].
В ближайшем аналоге для подстройки вектора весовых коэффициентов нерекурсивного фильтра используется метод, реализующий процедуру:
Wi+1=Wi+2dεiXi,
где d - коэффициент, определяющий степень инерционности и устойчивость процесса адаптации; εi - сигнал ошибки.
При этом минимизируется среднеквадратическая ошибка εi. В результате работы адаптивного фильтра (АФ) происходит уменьшение влияния помехи на сигнал.
Недостатком устройства-прототипа является невысокая точность подавления помехи и невозможность подавления нескольких нефлуктуационных, например, гармонических помех.
Раскрытие сущности полезной модели.
Технической задачей, на решение которой направлена заявляемая полезная модель, является повышение точности фильтрации нефлуктуационных помех с учетом известной информации о фазовой структуре сигнала (форме фазового импульса), отличной от фазовой структуры помех.
Технический результат, который достигается в предлагаемой полезной модели, заключается в снижении уровня нефлуктуационных помех на выходе адаптивного цифрового фильтра за счет обеспечения возможности реализации метода настройки вектора весовых коэффициентов с учетом известной информации о фазовой структуре сигнала (форме фазового импульса), в результате чего происходит подавление нефлуктуационных помех, имеющих отличную от сигнала фазовую структуру, и повышается точность фильтрации.
Поставленная техническая задача решается и технический результат достигается тем, что адаптивный цифровой фильтр для подавления нефлуктуационных помех, содержащий первый и второй регистры задержки, состоящие из последовательно соединенных элементов задержки, перемножители выходных сигналов первого регистра задержки с весовыми коэффициентами, сумматор, перемножители с выходными сигналами второго регистра задержки, интеграторы, согласно заявляемой полезной модели, включает преобразователь комплексной огибающей сигнала в комплексно сопряженную огибающую, вход которого является входом устройства, причем этот вход соединен с входом первого регистра задержки, состоящего из последовательно соединенных первого, второго, третьего элементов задержки, выходы которых соединены с первыми входами первого, второго, третьего перемножителей выходных сигналов первого регистра задержки с весовыми коэффициентами, при этом выходы указанных перемножителей соединены с входами первого сумматора, выход которого является выходом устройства и одновременно - входом схемы адаптивной подстройки весовых коэффициентов, содержащей последовательно соединенные блок вычисления производной, блок вычисления модуля, второй сумматор, на второй вход которого подается постоянное напряжение - G, пропорциональное производной фазового импульса сигнала, а выход соединен с входом четвертого перемножителя, второй вход которого соединен с выходом первого сумматора, а третий вход предназначен для подачи постоянного напряжения - d, определяющего степень инерционности и устойчивость процесса адаптации, причем выход четвертого перемножителя соединен с первыми входами пятого, шестого, седьмого перемножителей, на вторые входы которых поступают выходные сигналы соответствующих последовательно соединенных четвертого, пятого, шестого элементов задержки второго регистра задержки, при этом вход второго регистра задержки соединен с выходом преобразователя комплексной огибающей сигнала в комплексно сопряженную огибающую, а выходы пятого, шестого, седьмого перемножителей с выходными сигналами второго регистра задержки соединены через первый, второй и третий интеграторы со вторыми входами первого, второго и третьего перемножителей выходных сигналов первого регистра задержки с весовыми коэффициентами.
Краткое описание чертежей.
Сущность полезной модели поясняется следующими чертежами:
на фиг. 1 представлена структурная схема заявляемого адаптивного цифрового фильтра для подавления нефлуктуационных (нешумовых, структурных) помех;
на фиг. 2 показаны импульсная и амплитудно-частотная характеристики заявляемого адаптивного цифрового фильтра при действии гармонической помехи;
на фиг. 3 представлены зависимости вероятности ошибки при приеме сигнала на фоне гармонической помехи;
на фиг. 4 представлены зависимости вероятности ошибки от количества гармонических помех при приеме сигнала с использованием заявляемого адаптивного цифрового фильтра;
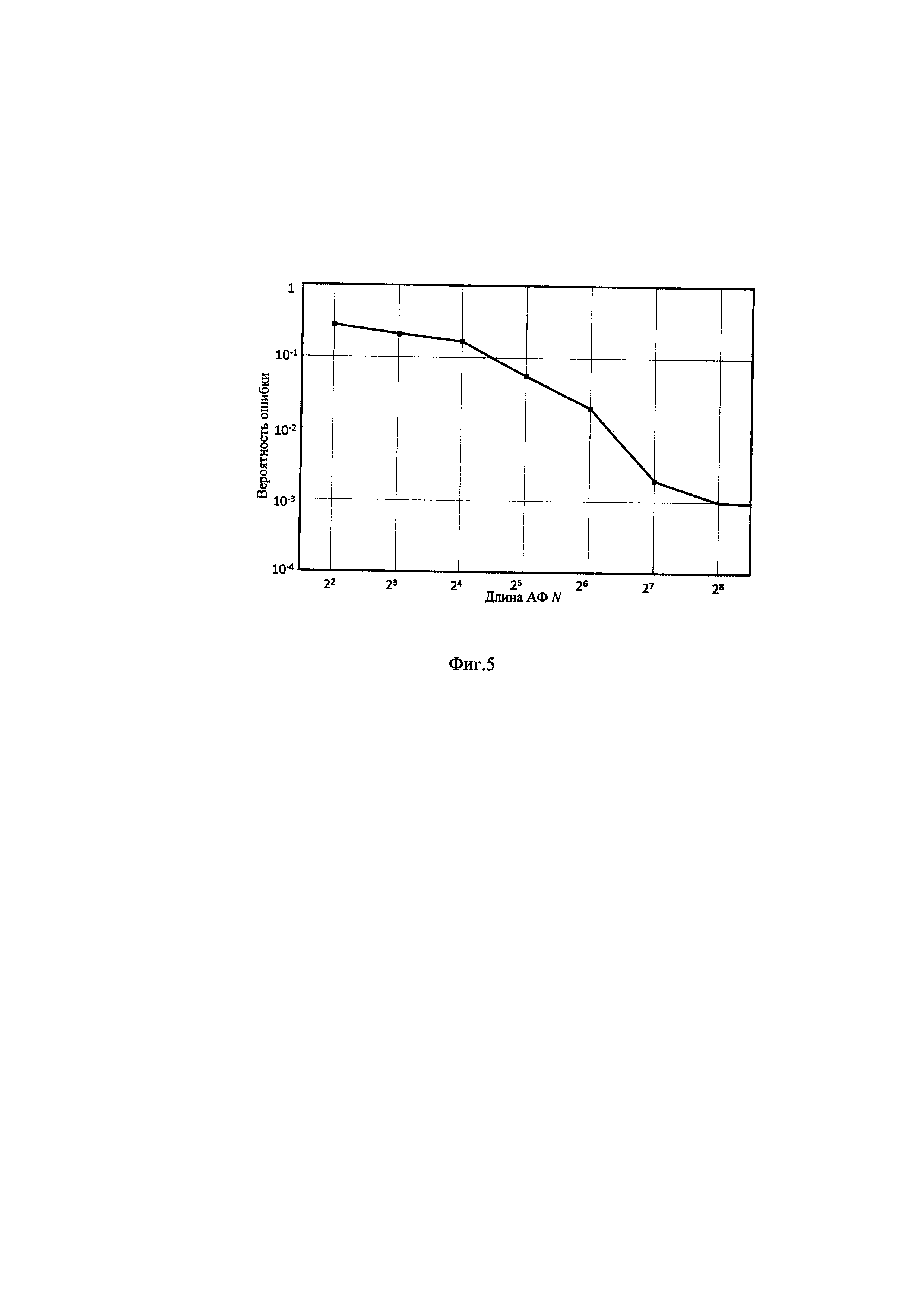
на фиг. 5 показан график зависимости вероятности ошибки от длины N заявляемого адаптивного цифрового фильтра.
Чертеж на фиг. 1 содержит следующие позиции:
1 - преобразователь комплексной огибающей сигнала в комплексно сопряженную огибающую;
2, 3, 4 - первый, второй, третий элементы задержки первого регистра задержки;
5, 6, 7 - первый, второй, третий перемножители выходных сигналов первого регистра задержки с весовыми коэффициентами;
8 - первый сумматор;
9 - блок вычисления производной;
10 - блок вычисления модуля;
11 - второй сумматор;
13, 14, 15 - первый, второй и третий интеграторы;
12 - четвертый перемножитель,
16, 17, 18 - пятый, шестой, седьмой перемножители с выходными сигналами второго регистра задержки;
19, 20, 21 - четвертый, пятый, шестой элементы задержки второго регистра задержки.
Осуществление полезной модели.
Адаптивный цифровой фильтр нефлуктуационных помех (фиг. 1) содержит преобразователь комплексной огибающей сигнала в комплексно сопряженную огибающую 1, вход которого является входом устройства, причем этот вход соединен с входом первого регистра задержки, состоящего из последовательно соединенных первого, второго, третьего элементов задержки 2, 3, 4, выходы которых соединены с первыми входами первого, второго, третьего перемножителей выходных сигналов первого регистра задержки с весовыми коэффициентами 5, 6, 7. Выходы этих перемножителей 5, 6, 7 соединены с входами первого сумматора 8, выход которого является выходом устройства и одновременно - входом схемы адаптивной подстройки весовых коэффициентов, содержащей последовательно соединенные блок вычисления производной 9, блок вычисления модуля 10, второй сумматор 11, на второй вход которого подается постоянное напряжение - G, пропорциональное производной фазового импульса сигнала, а выход соединен с входом четвертого перемножителя 12, второй вход которого соединен с выходом первого сумматора 8, а на третий вход подается постоянное напряжение - d, определяющее степень инерционности и устойчивость процесса адаптации. Причем выход четвертого перемножителя 12 соединен с первыми входами пятого, шестого, седьмого перемножителей 16, 17, 18, на вторые входы которых поступают выходные сигналы соответствующих последовательно соединенных четвертого, пятого, шестого элементов задержки 19, 20, 21 второго регистра задержки, при этом вход второго регистра задержки соединен с выходом преобразователя комплексной огибающей сигнала в комплексно сопряженную огибающую 1, а выходы пятого, шестого, седьмого перемножителей с выходными сигналами второго регистра задержки 16, 17, 18 соединены через первый, второй и третий интеграторы 13, 14, 15 со вторыми входами перемножителей выходных сигналов первого регистра задержки с весовыми коэффициентами 5, 6, 7.
Работа устройства основана на использовании известных данных о форме фазового импульса.
Используем запись сигнала через комплексную огибающую:
s(t)=Re[A(t)⋅exp(jω0t)],
где A(t)=A0exp[-jΨ(t)] - комплексная огибающая; Ψ(t) - информационная составляющая фазы сигнала.
Определим модуль производной от комплексной огибающей:
|A'(t)|=A0|-jΨ'(t)⋅ехр[-jΨ(t)]|=A0|Ψ'(t)|=A0⋅G,
где G=|Ψ'(t)| - модуль производной информационной составляющей фазы (наклон фазового импульса) сигнала.
Заявляемое устройство реализует способ подстройки вектора весовых коэффициентов, контролирующий форму фазового импульса принимаемого сигнала, и с учетом уравнения (I) имеет следующий вид:

С его помощью минимизируется целевой функционал

где yi - дискретные отсчеты комплексной огибающей A(t); М - знак математического усреднения.
Весовые коэффициенты Wi формируются первым, вторым и третьим интеграторами 13, 14, 15.
Входные дискретные отсчеты комплексной огибающей xi поступают на вход первого регистра задержки, состоящего из последовательно соединенных первого, второго и третьего элементов задержки 2, 3, 4, а с их выходов поступают на входы перемножителей выходных сигналов первого регистра задержки с весовыми коэффициентами 5, 6, 7 вектора отсчетов Xi с весовыми коэффициентами Wi, формируемыми первым, вторым и третьим интеграторами 13, 14, 15. Сигналы с выходов перемножителей выходных сигналов первого регистра задержки с весовыми коэффициентами 5, 6, 7 поступают на входы первого сумматора 8, выход которого является выходом устройства. Эта структура представляет собой нерекурсивный фильтр, реализующий процедуру подстройки вектора весовых коэффициентов, контролирующую форму фазового импульса принимаемого сигнала, и формирующий отсчеты yi выходного сигнала адаптивного цифрового фильтра.
В процессе адаптации происходит коррекция весовых коэффициентов Wi в соответствии с уравнением (II). Для этого выходной сигнал адаптивного цифрового фильтра дифференцируется блоком вычисления производной 9, затем вычисляется модуль производной в блоке вычисления модуля 10, и сигнал подается на второй сумматор 11, на. второй вход которого подается постоянное напряжение - G, пропорциональное производной фазового импульса сигнала. Это позволяет сравнить текущую величину наклона фазового импульса сигнала с идеальной априорно заданной величиной G.
При наличии в канале связи нефлуктуационных (нешумовых, структурных) помех эти величины будут отличаться, и второй сумматор 11 сформирует управляющее напряжение, пропорциональное их разности, которое будет использовано для подстройки вектора весовых коэффициентов в соответствии с уравнением (II). Для этого сигнал с выхода второго сумматора 11 подается на вход перемножителя 12, на второй вход поступает выходной сигнал адаптивного фильтра yi, а на третий вход подается постоянное напряжение - d, определяющее степень инерционности и устойчивость процесса адаптации. Сформированный таким образом сигнал перемножается в перемножителях с выходными сигналами второго регистра задержки 16, 17, 18 с вектором отсчетов комплексно сопряженной огибающей Xi*, задержанных во втором регистре задержки на элементах задержки 19, 20, 21:

Выходные сигналы перемножителей с выходными сигналами второго регистра задержки 16, 17, 18 поступают на входы первого, второго и третьего интеграторов 13, 14, 15, осуществляющих коррекцию вектора весовых коэффициентов Wi+1.
На фиг. 2 показана импульсная характеристика заявленного устройства в установившемся режиме при действии гармонической помехи для длины первого и второго регистров задержки N=256 элементов, а также соответствующая ей амплитудно-частотная характеристика. Отдельно приведены действительные Re и мнимые Im части коэффициентов wk. АФ в процессе адаптации формирует "ноль" амплитудно-частотной характеристики на частоте гармонической помехи, то есть осуществляет режекцию помехи.
На фиг. 3 для примера представлены зависимости вероятности ошибочного приема сигнала на фоне гармонической помехи с относительной интенсивностью μ. Штриховые линии соответствуют заявленному устройству, сплошные линии построены без адаптивного фильтра. Выигрыш от использования заявленного устройства в отношении сигнал/шум достигает 2 раз (3 дБ).
На фиг. 4 показаны зависимости вероятности ошибки от количества гармонических помех, одновременно присутствующих на входе приемника и распределенных с равномерным шагом в полосе 1,5 π/T. Устройство позволяет эффективно бороться как минимум с 4-5 помехами.
На фиг. 5 показаны графики, иллюстрирующие зависимость вероятности ошибки от длины N адаптивного цифрового фильтра (количества элементов задержки первого и второго регистров задержки). С ростом N вероятность ошибки уменьшается, стабилизация наступает при N≥256.
Реферат
Полезная модель относится к радиотехнике и может быть использована в устройствах цифровой обработки сигналов, с возможностью искажения в каналах внешних нефлуктуационных помех. Технический результат заключается в повышении точности фильтрации нефлуктуационных помех и в снижении уровня нефлуктуационных помех на выходе адаптивного цифрового фильтра. Адаптивный цифровой фильтр содержит первый и второй регистры задержки, перемножители, сумматоры, интеграторы, схему адаптивной подстройки весовых коэффициентов, содержащую последовательно соединенные блок вычисления производной и блок вычисления модуля, первый и второй регистры задержки, вход последнего соединен с выходом преобразователя комплексной огибающей сигнала и комплексно сопряженную огибающую.
Комментарии