Инспектирование обуви посредством тепловизора - RU2776465C2
Код документа: RU2776465C2
Чертежи












Описание
Область техники
Изобретение относится к детекторам, предназначенным для обнаружения объектов или материалов, которые не разрешено проносить в зону контролируемого доступа.
Уровень техники
В настоящее время представляется необходимым с высокой надежностью контролировать попытки внести в контролируемую зону или вынести из нее определенные объекты, не исчерпывающими примерами которых являются взрывчатые материалы.
Данная проблема охватывает очень широкий набор ситуаций, который включает (не ограничиваясь ими) попытки вноса объектов в контролируемую зону, такую как магазин, школа, железнодорожная станция, общественное или даже частное помещение, или попытки вынести объекты за пределы определенного периметра, например кражи из компании или в защищенной зоне.
В последние годы были разработаны сканеры тела, чтобы обнаруживать оружие, взрывчатку и другие предметы, спрятанные под одеждой людей, входящих в контролируемую зону. Все эти системы используют технологии, основанные на детектировании излучения, модулируемого или испускаемого телами инспектируемых людей. Излучения, используемые для этой цели, включают рентгеновское излучение, излучение в микроволновом, миллиметровом или терагерцовом диапазоне, инфракрасное излучение и ультразвук.
Несмотря на использование различных типов излучения и различных схем получения изображения, принцип всех этих сканеров тела состоит в создании электронного изображения человека, одежда которого представляется прозрачной. Затем данное изображение отображается на мониторе и рассматривается оператором, который определяет, проносит ли человек целевой объект. Для этого оператор, прошедший специальную подготовку для детектирования целевых объектов, должен быть способен определять, соответствуют ли объекты, идентифицированные сканером тела, анатомии человека, разрешенным объектам (таким как зажигалка, платок или другие подобные предметы) или целевому объекту, такому как оружие или взрывчатое вещество.
В настоящее время имеют место случаи, когда люди, которые пытаются обманным путем вынести объект за пределы контролируемой зоны или внести в нее такой объект, используют обувь, чтобы скрыть проносимый объект. Представляется, что такие действия в значительной степени связаны с тем обстоятельством, что эту зону трудно контролировать визуально или прощупыванием.
При этом представляется, что известные сканеры тела неспособны обнаруживать объекты, проносимые таким способом, поскольку достаточно толстая верхняя часть туфли или ботинка (далее - предмет обуви) образует экран, не позволяющий современным технологиям определить форму стопы и, следовательно, идентифицировать целевые объекты.
Именно поэтому некоторые операторы, в попытке улучшить качество инспекции, требуют от людей, желающих войти или выйти из контролируемой зоны, снять обувь. Однако визуальный осмотр снятой обуви не только приводит к ограничениям и дискомфорту, но и не всегда обеспечивает полностью надежное инспектирование. Фактически, оператор не может определить, не спрятан ли проносимый объект или материал во внутренней полости, к которой нет прямого доступа из обуви (в особенности, если данная полость расположена в подошве).
В связи с этим заявителем ранее было разработано устройство указанного типа, проиллюстрированное на прилагаемом чертеже (см. фиг. 1) и представляющее собой рамку, которая содержит:
- базовую часть 10, образованную прямоугольной пластиной в форме ступеньки, на верхней плоской поверхности которой сформированы профиль 12 в форме отпечатка подошвы и ограничитель (упор) 14, предназначенные для приема и позиционирования одной обутой стопы человека,
- две симметричные боковые панели 20, в которых размещены средства обнаружения, и
- информационный модуль 30.
Примеры устройства по фиг. 1 раскрыты в документах FR 2860631, ЕР 1574879, FR 2889338 и FR 2911212.
Средства обнаружения, описанные в указанных документах, могут быть образованы обмотками для обнаружения металлов; средствами отбора проб, в частности в виде всасывающих сопел, обеспечивающих анализ пара или следов частиц, например, наркотиков или взрывчатых веществ; средствами анализа, основанными на ядерно-магнитном резонансе и содержащими, например, катушки Гельмгольца; средствами анализа суммарного импеданса или устройствами обнаружения радиоактивного излучения.
В документе US 2014/0320311 предложено добавить к обычному сканеру тела базовую пластину, которая снабжена антенной решеткой, излучающей электромагнитные волны в направлении верхней стенки данной пластины. Они отражаются предметом обуви в направлении внутреннего объема базовой пластины с возможностью восприниматься антеннами. Обнаруживать наличие целевых объектов в предмете обуви может процессор.
Данное устройство соответствующим образом улучшает обнаружение целевых объектов, спрятанных в предметах обуви. Однако представляется, что предлагаемое детектирование имеет ограниченные возможности, если эти объекты содержат диэлектрические вещества, такие как взрывчатка, распределенные в предмете обуви с одинаковой толщиной. Фактически детектор не может различить ответный сигнал, воспринятый антеннами, если предмет обуви имеет толстую подошву, а также когда подошва тонкая, но покрыта слоем взрывчатки, имеющим постоянную толщину.
Раскрытие изобретения
Соответственно, задача, решаемая изобретением, состоит в том, чтобы предложить новое средство обнаружения, повышающее надежность детектирования целевых объектов или целевых материалов, не разрешенных для проноса в зону контролируемого доступа и скрытно размещенных в обуви.
Для решения данной задачи изобретение предлагает способ инспектирования предмета обуви, надетого на стопу человека и имеющего подошву, нижняя сторона которой предназначена для приведения в контакт с полом. Предлагаемый способ включает следующие операции:
- посредством тепловизора получают тепловое изображение обуви без снятия ее с ноги инспектируемого человека,
- по данному изображению определяют нижнюю границу стопы этого человека, соответствующую нижней поверхности стопы,
- определяют позицию предмета обуви относительно тепловизора во время получения теплового изображения и
- на основе этих данных (по позициям предмета обуви относительно тепловизора и нижней границы стопы) определяют расстояние между нижней поверхностью подошвы и нижней поверхностью стопы инспектируемого человека.
Далее приведены некоторые предпочтительные (но неограничивающие) признаки предлагаемого способа инспектирования, которые могут использоваться как индивидуально, так и в комбинации друг с другом.
Во время операции получения теплового изображения тепловизор ориентируют в направлении пятки инспектируемого человека, причем так, что полученное тепловое изображение содержит указанную пятку,
Тепловое изображение получают в виде двумерной матрицы, содержащей N строк и М колонок пикселей, причем каждому пикселю соответствует значение интенсивности излучения.
Операция определения границы включает следующие шаги: для N строк пикселей вычисляют среднее значение для пикселей, принадлежащих одной и той же строке, получая в результате столбец усредненных N пикселей, вычисляют производную усредненных пикселей и идентифицируют пиксель, соответствующий пику производных, вычисленных таким образом
Операция определения расстояния включает шаг, на котором идентифицируют усредненный пиксель, имеющий наименьшее значение.
Кроме того, данная операция включает следующие шаги: для совокупности пикселей вычисляют разность между пикселем, соответствующим пику производных, и усредненным пикселем, имеющим минимальное значение, определяют линейный множитель в виде функции от позиции предмета обуви относительно тепловизора и умножают полученную таким образом разность на линейный множитель.
Пик производных выявляют среди производных, соответствующих усредненным пикселям, расположенным выше усредненного пикселя, имеющего наименьшее значение.
Способ включает также шаг, на котором до вычисления производной усредненных пикселей осуществляют их низкочастотную фильтрацию.
Способ включает также следующие операции: детектируют расслоение подошвы путем детектирования последовательных эхо-сигналов после испускания волн в направлении подошвы, нормируют детектированное расслоение, используя расстояние между нижней поверхностью стопы и нижней поверхностью подошвы, определенное в ходе соответствующей операции, сопоставляют нормированное значение расслоения с пороговым значением тревожного сигнала и в случае превышения указанного порогового значения включают тревожный сигнал.
Кроме того, способ включает следующие операции: детектируют расслоение подошвы путем детектирования последовательных эхо-сигналов после испускания волны в направлении подошвы, идентифицируют среди последовательных эхо-сигналов эхо-сигнал с наибольшей амплитудой, для эхо-сигнала с наибольшей амплитудой определяют время распространения и отражения, по указанному времени распространения и отражения определяют расстояние по высоте между уровнем расслоения, соответствующим эхо-сигналу с наибольшей амплитудой, и нижней поверхностью подошвы, сопоставляют указанное расстояние и расстояние между нижней поверхностью стопы и нижней поверхностью подошвы, полученное в ходе соответствующей операции, и в случае необходимости включают тревожный сигнал.
Способ включает также следующие операции: измеряют электрическую емкость, которая образована подошвой предмета обуви, установленной на базовую часть, нормируют измеренную таким образом электрическую емкость, используя расстояние между нижней поверхностью стопы и нижней поверхностью подошвы, определенное в ходе соответствующей операции, сопоставляют значение электрической емкости, нормированной указанным образом, с пороговым значением тревожного сигнала и в случае превышения указанного порогового значения включают тревожный сигнал.
Способ дополнительно включает следующие операции: измеряют электрическую емкость, которая образована подошвой предмета обуви, установленной на базовую часть, исходя из этой информации, определяют расстояние (по высоте) между нижней поверхностью стопы и нижней поверхностью подошвы и сопоставляют значение высоты, определенное таким образом, и расстояние между нижней поверхностью стопы и нижней поверхностью подошвы, определенное в ходе соответствующей операции, не использующей электрическую емкость, и в случае необходимости включают тревожный сигнал.
Согласно своему второму аспекту изобретение предлагает систему для инспектирования предмета обуви, имеющего подошву и надетого на стопу человека. Предлагаемая система содержит:
- базовую часть, сконфигурированную для приема по меньшей мере одной стопы инспектируемого человека с надетым на нее предметом обуви,
- тепловизор, выполненный с возможностью получения теплового изображения предмета обуви, надетого на ногу,
- средства, позволяющие определить позицию обуви относительно тепловизора, и
- процессор, выполненный с возможностью определять, на основе теплового изображения предмета обуви, нижнюю границу стопы инспектируемого человека, соответствующую нижней поверхности стопы, и с возможностью определять, с учетом позиции предмета обуви относительно тепловизора и нижней границы стопы, расстояние между нижней поверхностью подошвы и нижней поверхностью стопы.
Далее приведены некоторые предпочтительные (хотя и не ограничивающие) признаки предлагаемой системы инспектирования, которые могут использоваться как индивидуально, так и в комбинации друг с другом.
Тепловизор прикреплен к базовой части так, чтобы обеспечить изображение задника предмета обуви.
Система сконфигурирована с возможностью инспектировать два предмета обуви без снятия их с ног инспектируемого человека и содержит два тепловизора, каждый из которых способен обеспечить изображение одного из предметов обуви.
Тепловизор чувствителен к излучению, длина волны которого составляет величину порядка десятков микрометров, а предпочтительно лежит в интервале 8-14 мкм.
Если базовая часть установлена на полу, угол поля зрения тепловизора в плоскости, перпендикулярной полу, больше, чем в горизонтальной плоскости, параллельной полу.
Тепловое изображение представляет собой двумерную матрицу, в которой пиксели расположены в виде N строк и М столбцов, причем N больше М.
Средства, выполненные с возможностью определять позицию обуви относительно инфракрасной камеры (тепловизора), содержат по меньшей мере один из следующих компонентов: механический ограничитель, зафиксированный относительно тепловизора и сконфигурированный с возможностью приведения в контакт с участком предмета обуви во время инспектирования, визуальный маркер, комплект фотоэлектрических ячеек, выполненный с возможностью посылать и/или принимать оптический пучок и закрепленный на двух противолежащих стенках, сконфигурированных с возможностью расположения с любой стороны предмета обуви, антенную решетку, способную посылать и/или принимать магнитное поле и закрепленную в базовой пластине системы, и/или по меньшей мере один инфракрасный передатчик и по меньшей мере один инфракрасный приемник, снабженные устройством, способным анализировать время двукратного прохождения инфракрасной волны между передатчиком и приемником.
Согласно своему третьему аспекту изобретение предлагает детектирующий комплекс, содержащий описанную выше систему и по меньшей мере один из следующих детекторов:
- сканер тела, содержащий средства, обнаруживающие целевой объект посредством одного или более видов излучения энергии, модулируемой или испускаемой телом инспектируемых людей,
- детектирующее устройство, содержащее средства, которые способны обнаруживать расслоение подошвы, детектируя последовательные эхо-сигналы после испускания волн в направлении подошвы, и
- средства измерения электрической емкости, образованной подошвой предмета обуви.
Краткое описание чертежей
Другие свойства, решаемые задачи и преимущества изобретения станут более понятны из нижеследующего подробного описания и прилагаемых чертежей, соответствующих неограничивающим примерам.
На фиг. 1 представлено описанное выше детектирующее устройство для инспектирования обуви, выполненное согласно уровню техники.
На фиг. 2 представлено сделанное спереди тепловое изображение человека, стоящего вертикально.
На фиг. 3а и 4а представлены фотографии в профиль двух примеров обуви.
На фиг. 3b представлено тепловое изображение предмета обуви по фиг. 3а, полученное посредством инфракрасной камеры (тепловизора).
На фиг. 3с представлено тепловое изображение по фиг. 3а после осуществления низкочастотной фильтрации.
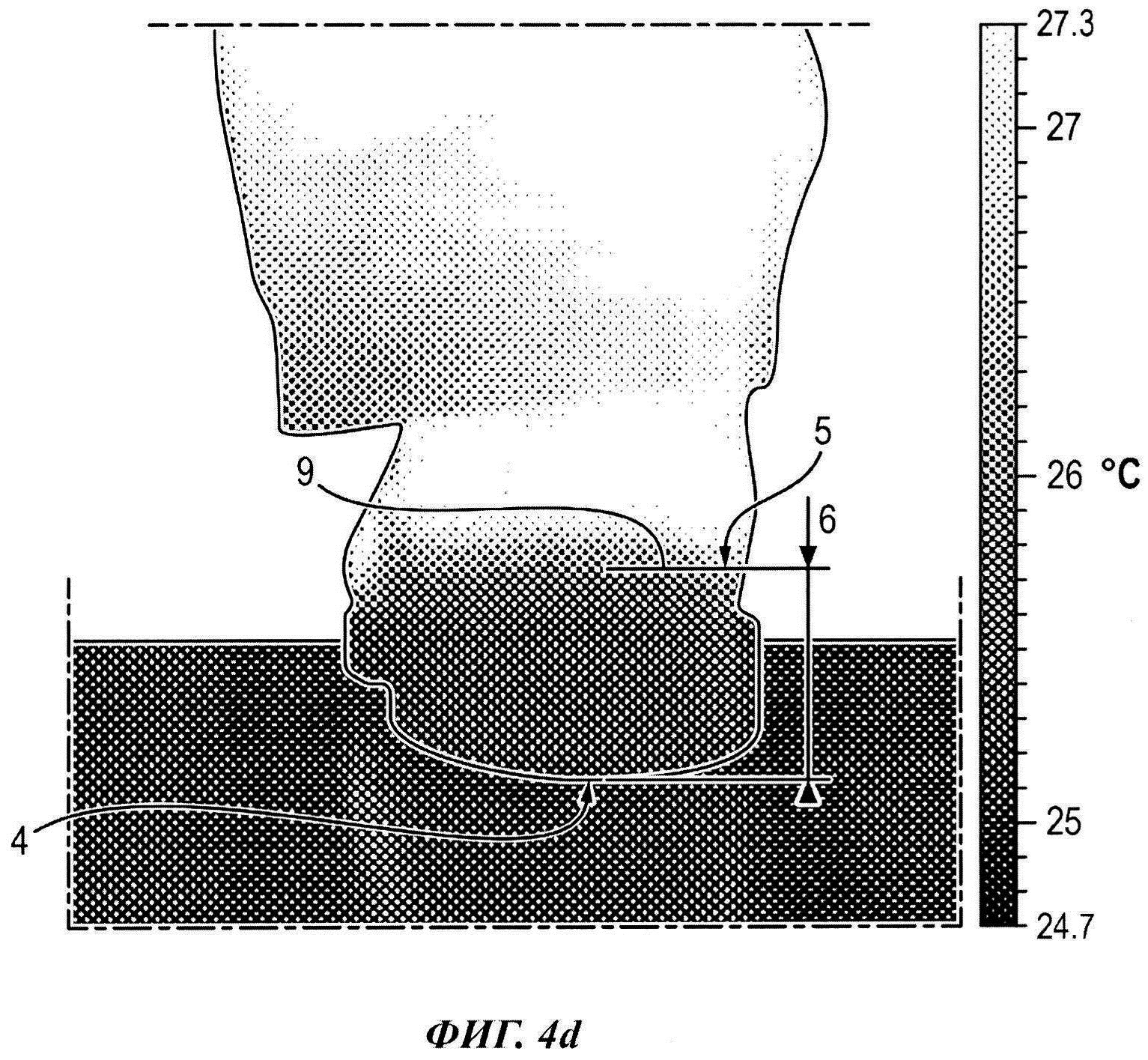
На фиг. 3d и 4b представлены тепловые изображения, соответственно по фиг. 3а и 4а, после осуществления низкочастотной фильтрации, а также модифицированная температурная шкала.
На фиг. 3е и 4с предметы обуви соответственно по фиг. 3а и 4а представлены на виде сзади.
На фиг. 3f представлено тепловое изображение предмета обуви по фиг. 3е, полученное посредством инфракрасной камеры.
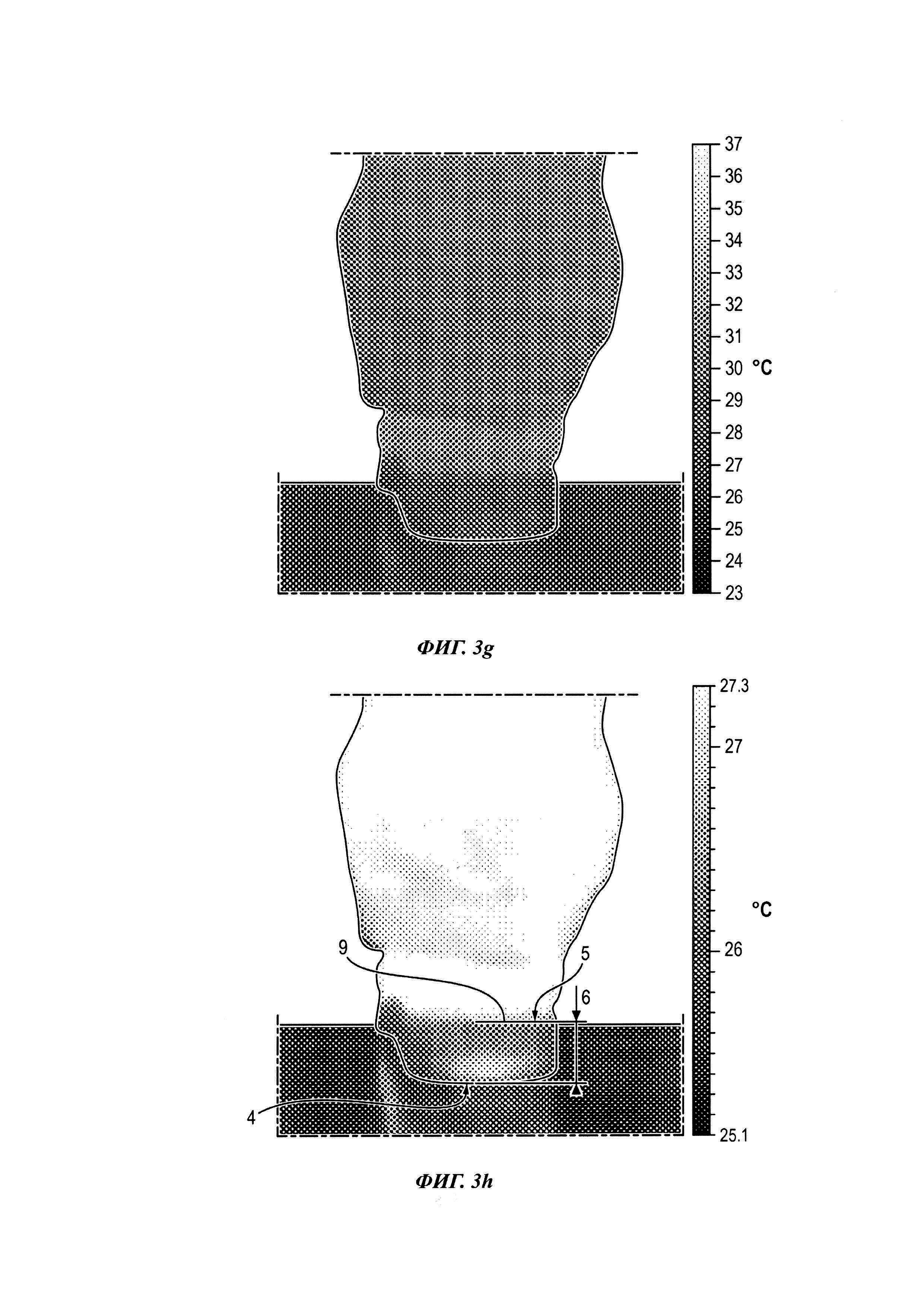
На фиг. 3g представлено тепловое изображение по фиг. 3е, полученное после осуществления низкочастотной фильтрации.
На фиг. 3h и 4d представлены тепловые изображения соответственно по фиг. 3е и 4с после осуществления низкочастотной фильтрации, а также модифицированная температурная шкала.
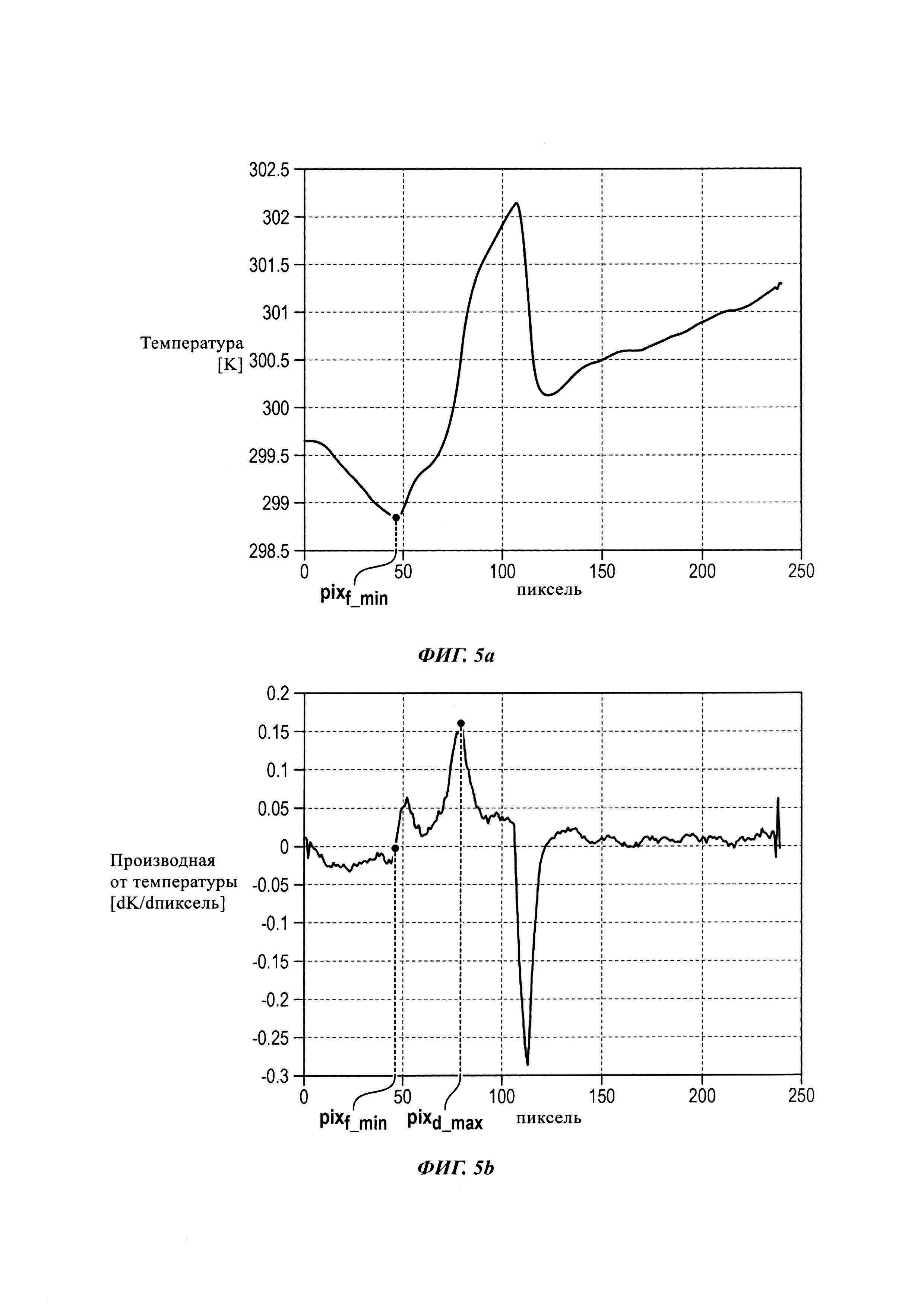
На фиг. 5а приведен пример графика значений температуры (в градусах Кельвина) для столбца усредненных пикселей, на которые наложен низкочастотный фильтр.
На фиг. 5b приведен график производных от значений по фиг. 5а (производная от температуры по номеру пикселя, dK/dpixel).
На фиг. 6 представлен первый пример системы инспектирования согласно изобретению, выполненной в виде сканера тела.
На фиг. 7 представлен второй пример системы инспектирования согласно изобретению, выполненной в виде устройства для инспектирования предметов обуви.
На фиг. 8 представлен еще один пример системы инспектирования согласно изобретению, выполненной в виде устройства для инспектирования одного предмета обуви.
На фиг. 9 приведена блок-схема, иллюстрирующая операции способа инспектирования согласно варианту изобретения.
На фиг. 10 приведена блок-схема, иллюстрирующая примеры шагов определения нижней границы стопы инспектируемого человека на основе теплового изображения.
На фиг. 11 приведена блок-схема, иллюстрирующая примеры шагов получения информации о расстоянии между нижней поверхностью подошвы и нижней поверхностью стопы инспектируемого человека, причем данное расстояние оценивается, исходя из положения нижней границы стопы и из расстояния между предметом обуви и тепловизором.
Осуществление изобретения
Для выявления целевых объектов изобретение предлагает использовать один или более тепловизоров 7 (см. фиг. 6), определяющих расстояние 6 (по оси, перпендикулярной полу) между полом и нижней поверхностью пятки носителя обуви (см. фиг. 3d, 4b), и применять эту информацию для обнаружения возможного наличия целевого объекта в предмете 2 обуви. Если инспектируемый человек не проносит целевой объект, размещенный между стопой и подошвой 3, данное расстояние 6 соответствует толщине подошвы 3.
Тепловизор 7 (известный также под названием "инфракрасная камера") в данном случае представляет собой устройство, способное регистрировать инфракрасные излучения, испускаемые телом человека и изменяющиеся в зависимости от температуры тел.
Тепловизоры 7 уже применялись для инспектирования людей. Однако в тех случаях, когда тепловизор 7 не обеспечивает получение точного изображения контуров тела одетого человека, эти устройства часто используются только для выявления пересечения граничной линии (инфракрасные барьеры) или для определения расстояния между устройством и объектом. Конкретные примеры таких применений можно найти в US 2007/235652 или FR 2950976.
Фактически, как следует из прилагаемых чертежей (см. фиг. 2), тепловизор 7 регистрирует инфракрасное излучение, испускаемое телом человека. Надетая одежда неизбежно нагревается его Телом, а это не позволяет получить четкий контур данного тела и, таким образом, обнаружить наличие целевых объектов, возможно, скрытых под одеждой. Кроме того, верхней частью предметов 2 обуви блокируется рассеивание тепла, т.е. уменьшается количество излучения, испускаемого стопами. В результате на тепловых изображениях, полученных камерой, зона стоп по сравнению с остальными частями тела оказывается даже более трудно различимой. Это следует также из фиг. 3b и 3f, которые будут рассмотрены далее. На них представлены тепловые изображения предмета 2 обуви, надетой на ногу человека, на стадии до обработки процессором.
Заявителем было показано, что, вопреки всем этим трудностям, эффективное применение теплового изображения обуви, надетой на ногу человека, с целью точного определения расстояния 6 между нижней поверхностью его стопы и полом, тем не менее, возможно. Как показано на фиг. 3е, 3h, 4b и 4d, после обработки изображений граница между нижней поверхностью 5 стопы и полом выявляется с четкостью, достаточной для получения информации о данном расстоянии 6.
Система 1 согласно изобретению, предназначенная для инспектирования предмета 2 обуви, содержит следующие компоненты (см. фиг. 6-8):
- базовую часть 10, сконфигурированную для приема по меньшей мере одной стопы инспектируемого человека с неснятым предметом 2 обуви,
- тепловизор 7, выполненный с возможностью получения теплового изображения предмета 2 обуви, надетого на ногу,
- средства 15, позволяющие определить позицию предмета 2 обуви относительно тепловизора 7, и
- процессор 16, выполненный с возможностью определять, на основе теплового изображения предмета 2 обуви, нижнюю границу 9 стопы человека, соответствующую нижней поверхности 5 стопы, и, исходя из положения нижней границы 9 стопы и позиции предмета 2 обуви относительно тепловизора 7, получающий информацию о расстоянии 6 между нижней поверхностью 4 подошвы 3 и нижней поверхностью 5 стопы инспектируемого человека.
В данном контексте подошва 3 представляет собой ту часть предмета 2 обуви, которая приводится в контакт с полом. Для выполнения такого контакта подошва имеет нижнюю поверхность, которая находится в непосредственном соприкосновении с полом, а верхняя поверхность подошвы сконфигурирована с возможностью приходить в контакт с нижней поверхностью 5 стопы человека (или с нижней поверхностью целевого объекта, когда он помещен между стопой и подошвой 3). В зависимости от конструкции предметов 2 обуви нижнюю границу 9 стопы можно наблюдать (см. пример, проиллюстрированный на фиг. 3a-3h) или она скрыта (см. предмет 2 обуви на компенсированной подошве, проиллюстрированный на фиг. 4a-4d).
Общая конструкция системы 1 может быть любого типа.
Например, ее можно выполнить в виде сканера тела, как это описано в документах ЕР 2202700, US 2014/03200331 или даже в US 2007/0235652 и проиллюстрировано в качестве неограничивающего примера на фиг. 6.
Более конкретно, система 1 может содержать базовую часть 10, снабженную по меньшей мере двумя симметричными боковыми панелями 20, в которых размещены средства 26 обнаружения и, главное, источник излучения в каком-нибудь из следующих спектральных интервалов: рентгеновское излучение, излучение в микроволновом, миллиметровом или терагерцовом диапазоне, инфракрасное излучение или даже ультразвук. Конечно, в дополнение к средствам обнаружения, использующим энергию излучения, можно использовать и другие средства такого назначения, в частности, обмотки для обнаружения металлов, средства отбора проб в виде, например, всасывающих сопел, обеспечивающих анализ пара или следов частиц, например наркотиков или взрывчатых веществ, средства анализа, основанные на ядерно-магнитном резонансе и содержащие, например, катушки Гельмгольца, средства анализа суммарного импеданса или устройства обнаружения радиоактивного излучения.
В типичной ситуации базовая часть 10 может быть сформирована в виде шлюза или, как более простой вариант, в виде двери.
В возможном варианте базовая часть 10 может содержать также перекрытие 11, соединяющее верхние части боковых панелей над головой инспектируемого человека, и/или плиту 12, по которой он проходит.
Как вариант, система 1 может представлять собой обычную конструкцию, используемую для устройств, инспектирующих предмет 2 обуви. Такие конструкции описаны в документах FR 2860631, ЕР 1574879, FR 2889338, FR 2911212 и проиллюстрированы в виде неограничивающего примера на фиг. 7 и 8. Далее общая конструкция этих устройств подробно не рассматривается; однако, стоит отметить, что представленное на этих чертежах устройство содержит:
- опорную (базовую) часть 10, сформированную плитой 13 в виде ступеньки, предназначенной для приема и позиционирования ноги с надетым предметом 2 обуви,
- две симметричные боковые панели 20, в которых размещены средства обнаружения, и,
- информационный модуль (в качестве опции).
Устройство, проиллюстрированное на данных чертежах, может соответствовать по своей геометрии, размерам и характеру сообщений, выводимых на информационный модуль, рекомендациям, изложенным в упомянутых документах.
Это относится и к любым принадлежностям, которые применяются для выборочного селективного осмотра объектов у инспектируемых людей, к частотам, используемым для обнаружения металлов, и/или средствам для установки стопы, перед началом осмотра, напротив двух панелей.
В одном из вариантов устройство содержит по меньшей мере одно или более из следующих средств обнаружения:
- средство 24, выполненное с возможностью обнаруживать расслоение подошвы 3, детектируя последовательные эхо-сигналы после испускания волны в направлении подошвы 3, и/или
- средство для измерения электрической емкости, образуемой подошвой 3 предмета 2 обуви. В частности, такое средство может быть снабжено электродами 22, размещенными в зоне отпечатка стопы и в верхней части боковых панелей 20. Более подробно оно будет рассмотрено далее.
Средства 15, сконфигурированные для определения позиции предмета 2 обуви относительно тепловизора 7, могут содержать специальный механический ограничитель, зафиксированный относительно тепловизора 7 и выполненный с возможностью приведения в контакт с частью предмета 2 обуви во время инспектирования. В типичном случае механический ограничитель может быть позиционирован так, чтобы он приходил в контакт с носком или задником предметом 2 обуви. Далее будет показано, что такой ограничитель желательно позиционировать для приема задника, т.к. это позволяет точно определить позицию пятки инспектируемого человека. В данном варианте предпочтительно придать механическому ограничителю такие размеры и позиционировать его таким образом, чтобы он не был помехой для получения тепловых изображений, создаваемых тепловизором 7.
Предусмотрена возможность специально прикрепить механический ограничитель к плите 12 сканера тела или к плите 13 инспектирующего устройства.
В варианте, проиллюстрированном на фиг. 8, механический ограничитель представляет собой невысокий выступ, выполненный с изгибом, воспроизводящим форму задника обуви. Он закреплен на плите 13 инспектирующего устройства и задает осевое положение, соответствующее направлению введения стопы в устройство, и ориентацию ее в устройстве.
Как вариант, средства 15, сконфигурированные с возможностью определения позиции предмета 2 обуви относительно тепловизора, могут дополнительно содержать по меньшей мере один или более из следующих компонентов:
- визуальный маркер (например отпечаток стопы), помещенный на базовой плите 12 сканера тела или на плите 13 инспектирующего устройства, причем предусмотрена возможность выполнить данный маркер заодно с базовой плитой 12 (или с плитой 13) или зафиксировать его на ней неразъемным образом (возможен также вариант, в котором маркер проецируется в надлежащее место проекционным аппаратом),
- антенную решетку, способную посылать и/или принимать магнитное поле, причем ее можно закрепить в базовой плите 12 сканера тела или под ней (в другом варианте - в плите 13 инспектирующего устройства или под ней),
- комплект фотоэлектрических ячеек, выполненный с возможностью посылать и/или принимать оптический пучок и закрепленный на двух противолежащих стенках, сконфигурированных с возможностью позиционирования на любой стороне предмета 2 обуви, так что оптический пучок, испускаемый излучающей ячейкой в направлении принимающей ячейки, расположенной напротив, перекрывается стопой инспектируемого человека,
- по меньшей мере один инфракрасный передатчик и один инфракрасный приемник, а также устройство, анализирующее время двукратного прохождения инфракрасных волн между передатчиком и приемником.
Например, фотоэлектрические или инфракрасные передатчики могут быть размещены в одной из боковых панелей 20 системы 1 (в частности инспектирующего устройства или сканера тела), а приемники можно установить в другой боковой панели 20. Как вариант, предусмотрена возможность разместить передатчики и приемники в одних и тех же боковых панелях 20.
Разумеется, должно быть понятно, что каждый из примеров средств 15, определяющих позицию стопы, можно использовать как сам по себе, так и в комбинации с другими примерами. В типичном случае система 1 может содержать одновременно визуальный маркер и механический ограничитель.
Тепловизор 7 чувствителен к излучению с длинами волн порядка десятков микрометров, но предпочтительно - в интервале 8-14 мкм.
В возможном варианте тепловизор 7 представляет собой блок, способный формировать фиксированные или движущиеся изображения (соответственно фотографии или фильм).
Тепловизор 7 может быть прикреплен к базовой части 10 системы 1.
В одном из вариантов тепловизор 7 позиционирован на базовой части 10 с возможностью получения теплового изображения задней стороны (задника) предмета 2 обуви инспектируемого человека, причем желательно, чтобы на это изображение попал указанный задник. Фактически, заявителем было обнаружено, что данная часть предмета 2 обуви отображалась посредством инфракрасного излучения стопы гораздо более качественно, что приводило к более точным результатам (см. фиг. 3e-3h, 4b и 4d). Данный эффект заявитель объясняет тем, что по сравнению пальцами ноги с передней частью предмета 2 обуви эта часть находится в лучших условиях для контакта с пяткой человека. В результате пропускание инфракрасного излучения осуществляется лучше в зоне пятки, и тепловизор 7 формирует более четкое ее изображение по сравнению с передней частью стопы, т.е. выполняется более точное определение границы 9 между нижней поверхностью 5 стопы и подошвой 3 предмета 2 обуви.
Когда базовая часть 10 размещена на полу, угол 8 поля зрения тепловизора 7 в плоскости, перпендикулярной полу, больше, чем в горизонтальной плоскости, параллельной полу. Другими словами, тепловое изображение по высоте больше, чем по ширине. Такая конфигурация особенно пригодна, когда тепловизором 7 обеспечивается получение теплового изображения задника предмета 2 обуви, поскольку соответствующая зона тела узкая, а поставленная задача состоит в идентификации границы 9 между стопой и предметом 2 обуви относительно оси, перпендикулярной полу. В этом аспекте можно сослаться, конкретно, на фиг. 6-8, на которых обозначены углы 8 поля зрения тепловизоров.
В одном из вариантов тепловое изображение представляет собой двумерную матрицу, в которой пиксели расположены в виде N строк и М столбцов, причем N обязательно больше М. Например, N и М могут равняться 320 и 240 соответственно.
В случае необходимости в системе 1 можно закрепить на базовой части 10 два тепловизора 7, каждый из которых способен обеспечить изображение одного из предметов обуви инспектируемого человека. Таким образом, появляется возможность одновременно проинспектировать два предмета 2 обуви (см. фиг. 6, 7).
Как вариант, система 1 может содержать также по меньшей мере один дополнительный тепловизор 7, обеспечивающий получение дополнительного теплового изображения предмета 2 обуви. Например, один из тепловизоров может обеспечивать получение теплового изображения задника, в то время как остальные тепловизоры обеспечивают получение теплового изображения передней части предмета 2 обуви.
Разумеется, система 1 может содержать и четыре тепловизора 7, конкретно, по два тепловизора 7 для каждого предмета 2 обуви, как это проиллюстрировано для варианта по фиг. 6.
Процессор 16 может быть размещен в базовой части 10 системы 1 или на некотором расстоянии от нее, в том же самом помещении или в другом месте. Предусмотрена возможность его подсоединения, посредством проводной или беспроводной связи, к тепловизору 7, а также, в случае необходимости, к средствам 15, определяющим позицию предмета 2 обуви относительно тепловизора 7.
Процессор 16 может содержать, кроме того, блок памяти, хранящий (по меньшей мере какое-то время) тепловые изображения, созданные тепловизором 7, а также предпочтительные массивы справочных материалов (в особенности когда детектор снабжен средством измерения электрической емкости, образованной подошвой 3 предмета 2 обуви).
Далее будут описаны операции, выполняемые в варианте инспектирования S по меньшей мере одного предмета 2 обуви, надетого на ногу человека. При этом для упрощения описания рассматривается только вариант, в котором, в случае необходимости, средства 15, определяющие позицию предмета 2 обуви, содержат визуальный маркер в форме отпечатка стопы, сформированный на соответствующей базовой части механического ограничителя. В результате во время формирования теплового изображения позиция предмета 2 обуви относительно тепловизора 7 зафиксирована и известна.
Кроме того, тепловизор 7 размещен так, чтобы на тепловое изображение попадал задник предмета 2 обуви.
Перед началом инспекции инспектируемый человек позиционируется в системе 1 соответствующим образом.
Если система 1 содержит сканер тела, инспектируемый человек встает на базовую плиту 12 между двумя боковыми панелями 20 (вертикально, в случае необходимости), позиционируя свои стопы на соответствующих отпечатках. В примере, представленном на фиг. 6, средства 15, определяющие позицию стоп человека, механического ограничителя не имеют, хотя вариант с ограничителем тоже возможен.
Если система 1 содержит детектирующее устройство (см. фиг. 7 и 8), инспектируемый человек позиционирует свою стопу (или свои стопы) на плите 13, конкретно, на отпечатке стопы (стоп) и, в случае необходимости, с упором в соответствующий механический ограничитель.
Во время первой операции S1 тепловизор 7 формирует тепловое изображение предмета 2 обуви, надетого на ногу инспектируемого человека.
Тепловое изображение представляет собой двумерную матрицу, в которой пиксели расположены в виде N строк и М столбцов, причем каждому пикселю соответствует значение интенсивности излучения.
Во время второй операции (S2) определяют нижнюю границу 9 стопы инспектируемого человека. Данная граница 9 соответствует позиции нижней поверхности 5 стопы в предмете 2 обуви (это может быть также позицией верхней поверхности подошвы 3 (когда человек не перевозит в своем предмете 2 обуви целевой объект) или верхней поверхности целевого объекта (когда человек прячет его над подошвой 3)).
На третьей операции (S3) определяют позицию обуви относительно тепловизора. Для выполнения данной операции сначала выполняют ее первый шаг (S31), на котором процессор вычисляет для N строк среднее значение для пикселей, принадлежащих одной и той же строке, чтобы получить столбец усредненных N пикселей, далее обозначаемых как pix(i), где i∈[1; N]. В случае необходимости процессор 16 может до выполнения данного шага S31 выделить зону теплового изображения, содержащую пятку инспектируемого человека.
В возможном варианте, результаты которого проиллюстрированы на фиг. 5а, процессор 16 выполнен с возможностью осуществлять низкочастотную фильтрацию определенных N средних значений (опционный шаг S32). Например, чтобы получить усредненный пиксель pix(i), процессор 16 может усреднить значения данного пикселя со значениями трех пикселей, расположенных в столбце усредненных пикселей непосредственно над ним, и со значениями трех пикселей, расположенных в столбце непосредственно под ним, получая в результате усредненные и отфильтрованные пиксели pixf(i):

Во время второго шага (S33) процессор 16 идентифицирует усредненный пиксель pixmin (или, в случае необходимости, усредненный пиксель pixf_min, полученный после осуществления низкочастотной фильтрации), а именно пиксель с наименьшим значением. Данный пиксель pixmin соответствует зоне теплового изображения, соотносящейся с нижней поверхностью 4 подошвы 3. Фактически, как это специально показано на тепловых изображениях по фиг. 2, 3d, 3h, 4b и 4d, инфракрасное излучение отражается полом. Кроме того, нижняя поверхность 4 подошвы 3 является тем участком обуви, который наиболее удален от стопы и остальных частей тела, в результате чего данный участок испускает наименьшее количество инфракрасного излучения. Таким образом, на тепловом изображении все зоны, расположенные под нижней поверхностью 4 подошвы 3, соотносятся с инфракрасным излучением, отраженным от пола. Как станет понятно далее, участок теплового изображения, который находится под пикселем pixmin, имеющим наименьшее значение, может быть удален, поскольку он не вносит вклада в излучение, испускаемое стопой инспектируемого человека.
На третьем шаге (S34) процессор 16 вычисляет производную от средних значений pix(i) (или, в случае необходимости, от средних значений pixf(i), полученных после осуществления низкочастотной фильтрации), получая в результате производные pixd(i):

где х - высота пикселя pix(i).
На фиг. 5b проиллюстрирован пример результатов третьего шага S34, полученных путем обработки кривой по фиг. 5а.
Как вариант, может быть вычислена также разность между значениями смежных пикселей, поскольку высота пикселей тепловизора 7 одинакова.
Производную предпочтительно вычислять только для тех усредненных пикселей pix(i), которые расположены выше пикселя pixmin, соответствующего наименьшему значению инфракрасного излучения.
На четвертом шаге (S35) процессор 16 идентифицирует пиксель pixd-max, который соответствует пику производных pixd, полученных описанным образом. Этот пиксель pixd-max соотносится с нижней границей 9 стопы инспектируемого человека, т.е. с нижней поверхностью данной стопы.
Используя нижнюю границу 9 стопы инспектируемого человека и расстояние между предметом 2 обуви и тепловизором 7, процессор 16 определяет расстояние 6 между нижней поверхностью 5 стопы и нижней поверхностью 4 подошвы 3 (операция S4).
Для этого во время первого шага (S41) данной операции процессор 16 определяет для совокупности пикселей разность Δ между пикселем pixd-max, соответствующим пику производных, и усредненным пикселем pixmin, имеющим наименьшее значение.
Например, как показано на фиг. 5b, когда пиксель pixd-max соответствует пикселю pix(79), занимающему относительно нижнего конца столбца усредненных пикселей семьдесят девятую позицию, а усредненным пикселем pixmin, значение которого минимально, является усредненный пиксель pix(46) (сорок шестая позиция относительно нижнего конца столбца), разность Δ для совокупности пикселей составляет 79-46=33.
На втором шаге (S43) процессор 16 умножает полученную таким образом разность Δ на предварительно выбранный линейный множитель K, зависящий от позиции предмета 2 обуви относительно тепловизора 7. Эта процедура представляет собой относительно простое тригонометрическое вычисление, конвертирующее в метрическое расстояние количество пикселей, находящихся между пикселем pixmin, имеющим минимальное значение, и пикселем pixd-max, соответствующим пику производных. В данном варианте этот линейный множитель K задан и зафиксирован заранее (шаг S42), поскольку расстояние между задником предмета 2 обуви и тепловизором 7 является фиксированным и известным вследствие наличия отпечатка стопы и, если это потребуется, использования механического ограничителя. Множитель K равен тангенсу угла β между самой нижней точкой определенного пикселя и его наивысшей точкой (другими словами, тангенсу угла, под которым тепловизор "видит" этот пиксель), умноженному на расстояние между тепловизором 7 и поверхностью механического ограничителя, приведенной в контакт с предметом 2 обуви, т.е.
K=D×tgβ.
В результате, в примере, приведенном выше, для линейного множителя K, равного 1,25, расстояние 6 равно 41 мм.
Как вариант, когда расстояние между предметом 2 обуви и тепловизором 7 предварительно не зарегистрировано и, например, каждый раз измеряется предназначенными для этого средствами, процессор 16 определяет угол β в виде функции расстояния, измеренного средствами 15 при определении позиции предмета 2 обуви, а затем вычисляет линейный множитель K (шаг S42).
Процессор 16 определяет расстояние 6 между нижней поверхностью 5 стопы инспектируемого человека и нижней поверхностью 4 подошвы 3 предмета 2 обуви. Данное расстояние измеряется по оси, перпендикулярной полу, а также, в случае необходимости, перпендикулярной базовой плите 12 или плите 13 (в зависимости от конкретного приложения).
Определенное таким образом расстояние 6 между нижней поверхностью 5 стопы и нижней поверхностью 4 подошвы 3 может быть использовано для нормирования информации, полученной системой 1, или чтобы завершить/подтвердить измерение данного расстояния 6, выполненное параллельно другими средствами.
Например, если используется сканер тела, описанный в документе US 2014/0320331, волна отражается нижней поверхностью 5 стопы или, как вариант, целевым объектом, размещенным в предмете 2 обуви. Если толщина целевого объекта, находящегося под стопой носителя обуви, равномерна, антенны этот объект детектировать не могут. Однако комбинируя информацию, принятую антеннами, и расстояние 6, полученное из тепловых изображений предмета 2 обуви, процессор 16 способен определить, что нижняя поверхность 5 стопы удалена от нижней поверхности 4 подошвы 3 (или от детектируемого диэлектрического материала) на расстояние, которое больше ожидаемого. В этом случае процессор 16 генерирует тревожный сигнал, после чего предмет 2 обуви осматривает персонал службы безопасности.
То же самое происходит и при применении инспектирующего устройства.
В частности, определение расстояния 6 может быть использовано для нормализации сигналов при выявлении внутри предмета 2 обуви наличия инородного материала и/или в качестве резервных данных, повышающих надежность устройства.
Например, в инспектирующем устройстве, предназначенном для обнаружения целевых объектов и содержащем средства, способные в процессе операции S5 детектировать расслоение подошвы 3 (т.е. расслоение в направлении, перпендикулярном плите 13) путем детектирования последовательных эхо-сигналов после испускания волн в направлении данной подошвы 3, система 1 по изобретению может быть применена для нормализации сигналов, которые формируются средствами, обнаруживающими расслоения подошвы.
В специальном варианте средства 24, обнаруживающие расслоение, могут содержать одну или более пар прилегающих друг к другу микроволновых излучателей и приемников, которые размещены в плите 13 под отпечатком стопы. Таким образом, приемные средства, встроенные в устройство, детектируют микроволновые эхо-сигналы, отраженные от различных границ раздела или от расслоений, следующих одно за другом по вертикали между нижней поверхностью 4 подошвы 3 и нижней поверхностью 5 стопы, причем в данных слоях микроволновое излучение распространяется по-разному. Другими словами, средства, обнаруживающие расслоение, выявляют внутри массива подошвы 3 наличие полости или инородного материала и, таким образом, идентифицируют целевые объекты, спрятанные в предмете 2 обуви.
Более подробно конструкция и функционирование детектора этого типа рассмотрены в документе FR 1655726, зарегистрированном 15.04 2016 на имя заявителя настоящего изобретения.
На практике сборки микроволновых излучателей/приемников детектируют эхо-сигналы, которые отражаются обратно границами раздела материалов, образованными в результате расслоения подошвы 3, причем путем измерения времен передачи и приема этих сигналов детектируется расположение данных границ раздела по высоте.
Основным эхо-сигналом (т.е. эхо-сигналом с наибольшей амплитудой) является тот, который отражается нижней поверхностью 5 стопы, совпадающей с верхней поверхностью подошвы 3 (или, в соответствующей ситуации, с верхней поверхностью целевого объекта).
Для данного основного сигнала время прохождения и ослабление могут быть нормированы (операция S6) посредством деления этого отрезка времени на расстояние 6 между нижней поверхностью 5 стопы и нижней поверхностью 4 подошвы 3 (это расстояние определяют в процессе операции S4). В результате определяют задержку и ослабление, приходящиеся на 1 мм, т.е. не зависящие от толщины подошвы 3. Процессор 16 способен сопоставлять задержку и нормированное ослабление с соответствующими заданными порогами и в случае превышения данных порогов включать тревожный сигнал (операция S8), если это необходимо.
Таким образом, нормализация времени приема эхо-сигналов приемниками, выраженного в виде функции от расстояния 6 между нижней поверхностью 5 стопы и нижней поверхностью 4 подошвы 3, облегчает выявление аномалии на подошве 3.
Как вариант или в дополнение, проводят операцию S7, которая представляет собой простой тест, состоящий в прямом сопоставлении времени приема данного основного эхо-сигнала с расстоянием 6, определенным из тепловых изображений.
Фактически, в случае подошвы 3, имеющей минимальную толщину, для системы 1 ожидается прием основного эхо-сигнала, отраженного от нижней поверхности 5 стопы, соответствующий короткому времени распространения и отражения излучения, а в случае подошвы 3, имеющей существенную толщину, этот отрезок времени соответственно удлиняется.
Однако, если система 1 детектирует основной эхо-сигнал через короткое время распространения и отражения, в то время как тепловое изображение свидетельствует о существенной толщине подошвы 3, можно предположить, что внутри подошвы 3 имеется полость или инородное тело.
Как вариант или в дополнение, в одном из вариантов система 1 по изобретению может содержать также средства, которые в ходе операции S5 измеряют электрическую емкость, образованную подошвой 3 предмета 2 обуви после его помещения на базовую часть 10. Данные средства, если в этом есть необходимость, могут участвовать в определении границы 9 нижней поверхности 5 стопы для получения надежных и стабильных данных об эффективном расстоянии 6 между нижней поверхностью 5 стопы и нижней поверхностью подошвы 3.
Средства, измеряющие емкость, могут быть оснащены двумя группами электродов 22, первая из которых размещена в зоне отпечатков стопы, а вторая - в верхней части боковых панелей 20 (например в зоне поручней) (см. фиг. 7). Поручни предпочтительно прикрепить к базовой части 10, а изготовить их можно из электропроводного материала, введенного в массив панелей 20.
Кроме того, устройство может содержать электрический генератор (в типичном варианте генератор переменного тока), подключенный по последовательной схеме к упомянутым электродам 22 через выключатель.
Емкость, образующаяся между электродами 22, расположенными под отпечатком стопы и в поручнях, зависит, в первую очередь, от расстояния 6 между нижней поверхностью 5 стопы и нижней поверхностью 4 подошвы 3 предмета 2 обуви. Кроме того, значение импеданса данной емкости, заданного подошвой 3, велико по сравнению с импедансом тела человека, помещенного между этими же электродами 22. В результате средствами, измеряющими емкость, обеспечивается измерение расстояния 6 между нижней поверхностью 5 стопы и нижней поверхностью 4 подошвы 3. Определенную таким образом емкость можно нормировать (операция S6) посредством деления ее на данное расстояние 6, измеренное в процессе операции S4, получая в результате емкость, приходящуюся на 1 мм (т.е. емкость, не зависящую от толщины подошвы 3). Процессор 16 способен сопоставлять нормированную емкость с соответствующим заданным порогом и в случае превышения данного порога включать тревожный сигнал (операция S8), если это необходимо.
Как вариант или в дополнение, расстояние 6, определенное из теплового изображения предмета 2 обуви, можно, кроме того, в процессе операции S7 сопоставить с аналогичным расстоянием, полученным средствами измерения емкости, и в случае рассогласования этих данных включить тревожный сигнал (операция S8), если это необходимо.
В этом случае для более подробного описания применения средств, измеряющих емкость с целью определения толщины подошвы 3, также можно обратиться к FR 1655726.
Реферат
Изобретение относится к области измерительной техники, а именно к детекторам, предназначенным для обнаружения объектов или материалов, которые не разрешено проносить в зону контролируемого доступа. Предложен способ инспектирования обуви, надетой на стопу инспектируемого человека, причем предлагаемый способ включает следующие операции: посредством тепловизора получают (S1) тепловое изображение обуви, надетой на стопу инспектируемого человека, по тепловому изображению обуви определяют (S2) нижнюю границу стопы инспектируемого человека, определяют (S3) позицию обуви относительно тепловизора во время получения теплового изображения и по позиции обуви относительно тепловизора и по нижней границе стопы определяют (S4) расстояние между нижней поверхностью подошвы и нижней поверхностью стопы инспектируемого человека. Также предложена истема для инспектирования предмета обуви и детектирующий комплекс, содержащий указанную систему. Технический результат - повышение надежности детектирования целевых объектов или целевых материалов, не разрешенных для проноса в зону контролируемого доступа и скрытно размещенных в обуви. 3 н. и 17 з.п. ф-лы, 11 ил.
Комментарии