Способ изготовления стельки и устройство для получения образа подошвы - RU2485889C2
Код документа: RU2485889C2
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящим раскрывается способ и устройство для получения образа подошвы с использованием средства закрепления и натяжения эластичной мембраны, а также двусторонняя механическая обработка стельки с использованием вышеназванного образа.
Настоящим предлагается способ и устройство, позволяющие равномерно распределять напряжения, возникающие в подошве, по всей ее площади, и избегать чрезмерной деформации (уплощения) в пяточной и плюсневой зонах стопы, возникающей при помещении подошвы стопы на стекло сканера.
Уровень техники
Когда стопу помещают на стекло сканера, пяточная и плюсневая зоны испытывают деформацию (уплощение), что делает отсканированное изображение непригодным для точного создания стельки или ортопедического средства, которые бы полностью соответствовали полной поверхности подошвы стопы и нормально обеспечивали бы распределение нагрузки при ходьбе.
Для решения этой проблемы предлагается способ и устройство, которые позволяют достичь равномерного распределения напряжений по всей площади подошвы стопы, точно так, как это происходит при ходьбе здорового человека по песку. С этой целью на двух штангах, регулируемых по высоте и расстоянию между ними, подвешивается эластичная мембрана, связанная с рычагом, посредством которого можно увеличивать или уменьшать натяжение мембраны. Система позволяет изменять натяжение мембраны, так как содержит два элемента, вращение которых увеличивает или уменьшает натяжение мембраны и, таким образом, позволяет отрегулировать натяжение в соответствии с весом пациента. Кроме того, когда образ подошвы получен с помощью сканера при использовании мембраны, возможно на основе этого образа производить автоматизированную двустороннюю механическую обработку, при которой применяется поворачивающее устройство и используется специально разработанное программное обеспечение, что позволяет изготовлять стельку с отверстиями для вентиляции и без них.
В системе возможно использование группы камер для получения образа, что позволяет при разработке протеза применять систему для сканирования любой части тела пациента, включая все тело.
В настоящее время среди систем получения образа подошвы отсутствуют сканеры, доступные на рынке, которые обеспечивали бы такие возможности с помощью указанной выше эластичной мембраны. Двусторонняя механическая обработка стельки известна, но в настоящее время является ручной работой, при этом достаточно сложной.
Оборудование для видеоизмерений (технического зрения) обычно включает встроенные камеру и генератор лазерного излучения, из которых и состоит датчик для триангуляционных измерений. Лазерный генератор имеет на выходе оптическую систему, которая позволяет преобразовывать узкий луч лазера в пучок лучей, образующих плоскость, имеющий заранее выбранный фиксированный угол расхождения, обеспечивающий охват объекта по ширине. В сечении этой плоскостью детали или объекта измерения образуется линия отраженного от него света, или световая линия, которая фиксируется камерой, причем желательно, чтобы только указанная линия была источником света в зоне сбора данных, так как в противном случае возможно получение ложных точек, находящихся вне плоскости лазерных лучей, в которой проводится измерение. Кроме того, в конструкциях этого типа применяется перемещение датчика относительно измеряемого объекта. Синхронизированные между собой последовательности положений датчика и изображений позволяют выполнить трехмерную реконструкцию всех точек на световых линиях, соответствующих последовательным сечениям объекта плоскостями лазерных лучей, получаемыми при перемещении датчика относительно объекта.
На этапе, предшествующем измерениям, должен применяться какой-либо способ калибровки датчика, состоящего из камеры и лазера, и получения характеристик оси движения, для чего используется эталонный объект с известной геометрией. Такие системы, называемые системами лазерной триангуляции с разверткой, обычно используются для получения цифрового представления подошвы стопы. Однако при некоторых абсолютных и относительных положениях оптической оси камеры и плоскости развертки лазерного луча, а также при некоторых их положениях относительно сканируемой поверхности создаются условия, при которых растяжение световой линии и ее образа, фиксируемого камерой, становится большим или меньшим, что ведет к снижению точности измерений или к потере геометрической информации для определенных зон в связи с отсутствием считанных точек. Управление движением датчика и синхронизации движения с работой камеры также являются источниками соответствующих ошибок.
Кроме того, при использовании в этих устройствах лишь одной камеры возникает проблема, заключающаяся в том, что в ходе сканирования криволинейной поверхности с более или менее выраженными вогнутыми и выпуклыми зонами, например подошвы стопы человека, определенные участки световой линии могут оказаться невидимыми. Чтобы избежать этого, в одном варианте предусмотрено выравнивание лазера в направлении, перпендикулярном поверхности, и применение двух камер таким образом, что световая линия всегда была видима по меньшей мере на одном из двух изображений. Но такое оборудование вызывает следующие проблемы:
- Проблемы интегрирования механических компонент, подверженных износу, являющихся источниками погрешностей и снижения надежности. Сравнительно точные приспособления для позиционирования (шариковые ходовые винты, ременная передача с линейной разметкой или кодирующим датчиком линейного перемещения) существенно увеличивают стоимость оборудования.
- Лазерный диод используется как генератор света и калиброванный измерительный элемент, с которым связаны проблемы эксплуатационной долговечности и необходимости проведения квалифицированным персоналом наладочных и калибровочных операций, особенно в конце периода нормальной эксплуатации.
- Пациент должен по возможности длительно удерживать стопу неподвижно, чтобы было возможно получение последовательности изображений и данных о пространственном положении. Даже незначительное движение вызывает ошибки в геометрических данных, и эти ошибки могут остаться незамеченными.
- Расположение камер и лазера вдоль продольной оси стопы не дает оптимального ракурса для оцифровки боковых зон стопы начиная с определенной высоты из-за большой кривизны поверхности в боковых зонах стопы.
Раскрытие изобретения
Предлагается сканер подошвы стопы, представляющий собой трехмерный сканер, в типичных случаях - с бесконтактным лучом лазера, хотя система и может быть усовершенствована, если сканер представляет собой группу камер вместе с противоотражательным стеклом в конфигурации, специально предназначенной для построения полигональной сети, соответствующей поверхности подошвы. Когда стопа помещается на стекло сканера, она испытывает существенную деформацию (уплощение) в зоне пятки и в передней (плюсневой) зоне.
В этой ситуации изобретение позволяет добиться того, чтобы супинаторы или стельки, получаемые при данном способе сканирования подошвы, обеспечивали контакт стельки со всей поверхностью стопы и оставляли свободное пространство между стелькой и подошвой обуви в зоне, соответствующей своду стопы. Материал стельки является специализированным, а его толщина выбирается исходя из веса пациента и его двигательной активности таким образом, чтобы стелька достаточно хорошо адаптировалась, обеспечивая желательное положение стопы, но в то же время обладала достаточной эластичностью, чтобы свод стопы мог при необходимости по-прежнему функционировать как амортизатор для тела пациента. Указанная стелька может применяться, например, как независимое терапевтическое приспособление, помещаемое в обычную или спортивную обувь.
Сходным образом она может также непосредственно встраиваться в подошву обуви таким образом, чтобы не занимать предназначенное для стопы пространство и оставлять свободное пространство между стелькой и подошвой обуви в зоне свода стопы. В таком случае стелька не является удаляемой, а образует активную часть обуви, неотделимую от нее.
Важно, чтобы стелька, применяемая как эффективное терапевтическое средство, точно соответствовала поверхности подошвы пациента в правильном положении, а также контролировала бы положение голеностопного, коленного и бедренного суставов. Эта цель достигается, когда стопа нагружена, то есть когда пациент стоит, естественным образом распределяя вес на обе ноги, а врач регулирует положение стопы и голеностопного сустава, чтобы обеспечить желательную коррекцию.
Этот способ, который, конечно, с наибольшей вероятностью позволит создать стельку с желательным терапевтическим эффектом, имеет тот недостаток, что поверхность стопы уплощается стеклом, под которым размещен сканер, особенно в пяточной и плюсневой зонах. С другой стороны, данные о мягких тканях свода стопы не фиксируются при сканировании, из-за чего полученная стелька не полностью соответствует стопе. Результатом сканирования при данном способе и описанных условиях является почти плоская полигональная сеть с очень слабо выраженным рельефом, не отражающая фактическую форму стопы пациента при нагрузке, особенно в упомянутой зоне свода стопы, то есть в зоне, которая должна в наибольшей мере подвергаться воздействию для желательной коррекции стопы.
Изобретение, предлагаемое согласно настоящему описанию, дает универсальное решение для позиционирования при использовании любого сканера и включает устройство для закрепления эластичной мембраны с целью обеспечить сохранение гладкости поверхности стопы в процессе сканирования по этому способу и наличие свободного пространства, дающего возможность врачу придать стопе и голеностопному суставу правильное положение, а также после обработки образа позволяет выполнять автоматическую двустороннюю механическую обработку стельки с использованием дополнительных устройств для закрепления и позиционирования, что в настоящее время выполняется только вручную и требует высокой квалификации.
С одной стороны, предлагаемое изобретение также позволяет изготовлять ортопедические приспособления с намного более высокой функциональной точностью, чем способы, соответствующие уровню техники в настоящее время. Изобретение позволяет существенно улучшить результаты лечения патологий, связанных с напряжениями или усилиями, развивающимся в подошве стопы, например подошвенного фасцита, пяточной шпоры, перегрузки ахиллова сухожилия и икроножных мышц и т.д.
С другой стороны, изобретение использует принципы стереометрии при работе с сетчатым узором или структурированными маркерами, что прежде всего требует применения специальных способов эпиполярной геометрии. Применение этих способов в контексте данной проблемы требует разработки и реализации специальных эффективных алгоритмов обработки данных, что позволит добиться улучшения по сравнению с предшествующим уровнем техники. Чтобы улучшить (повысить) точность измерений, могут применяться способы, основанные на избыточности информации.
Другое преимущество изобретения состоит в том, что оно позволяет избежать применения механических узлов для перемещения лазеров, дифракционных решеток и проекторов, благодаря чему уменьшается сложность оборудования и сокращается число источников ошибок в ходе измерений. Так как камеры являются более дешевыми компонентами в подобных системах, а наиболее дорогостоящие компоненты, связанные с освещением, исключаются, становится возможным увеличить число камер без существенного увеличения конечной стоимости, обеспечить избыточность информации и повысить эффективную разрешающую способность.
Кроме того, существенно увеличивается надежность, снижаются затраты, связанные с изготовлением и обслуживанием, а производительность и рентабельность увеличиваются. Кроме того, достигается значительное уменьшение времени сбора данных, что позволяет ставить вопрос об измерениях, проводимых с помощью систем технического зрения в реальном времени, чего не предлагает современный уровень техники, а также открывает возможность будущего применения и в других ситуациях, в которых необходимы измерения.
Чтобы полностью адаптировать эластичную мембрану к поверхности стопы пациента в идеальном положении, необходимо устройство для надежного закрепления мембраны при сканировании с учетом того, что она должна удерживать вес пациента.
Предлагаемое устройство имеет две закрепляющие мембрану горизонтальные штанги, регулируемые по высоте и по расстоянию между ними. Кроме того, они могут вращаться относительно своих осей, что используется для регулирования натяжения мембраны с помощью двух вращающихся элементов. Регулирование высоты позволяет адаптировать устройство к различным сканерам, а регулирование расстояния между штангами необходимо для того, чтобы оставить пространство, в которое помещается стопа и в которое врач может ввести руку выше и или ниже мембраны для придания стопе нужного положения. Врач должен также иметь возможность при необходимости регулировать это расстояние.
Когда высота горизонтальных штанг и расстояние между ними отрегулированы по усмотрению врача, штанги фиксируются для многих последующих применений сканера, так как положение штанг должно изменяться для нового пациента разве что в исключительных случаях. Однако необходим механизм для натяжения мембраны и подбора степени натяжения в соответствии с характеристиками каждого пациента, его весом и антропометрическими размерами его стопы. В отличие от предыдущего данное регулирование должно быть простой и быстро выполнимой операцией, так как натяжение мембраны должно регулироваться индивидуально для каждого случая.
Натуральный каучук и силикон в качестве материала мембраны обеспечивают удовлетворительные результаты, но применимы также любые материалы с аналогичными механическими свойствами. В дополнение к требуемым характеристикам эластичности и прочности важно, чтобы цвет материала мембраны не был темным, так как темный цвет невидим для большинства сканеров. Поэтому рекомендуется использовать материал светлого цвета (предпочтительно - белого) или полупрозрачный материал, который также допускает сканирование с использованием естественного цвета стопы.
По образу, полученному в результате сканирования стопы с использованием эластичной мембраны, получают геометрическое представление подходящей стельки. Такая стелька изготовляется с помощью двусторонней механической обработки. Стельки такого типа уже предлагаются на рынке, но применяемый способ является ручным, требующим высокой квалификации. В данном случае, когда образ получен сканированием с применением мембраны и устройства для закрепления и вращения, с помощью специально разработанного программного обеспечения может осуществляться автоматизированная двусторонняя механическая обработка, исходящая из полученного образа, а стелька может быть выполнена с отверстиями для вентиляции или без них.
В настоящем изобретении предусмотрено, что на гибкой мембране на стороне, открытой для сканирования, то есть на нижней стороне мембраны, постоянно присутствуют линии или другие геометрические элементы. Эти линии или другие геометрические элементы играют роль мишеней, обычно используемых в промышленной фотограмметрии, в которой на сканируемую поверхность приклеиваются точечные мишени или маркеры. Указанные маркеры могут быть выполнены с использованием различных способов печати (трафаретной печати адгезивными красителями, специально предназначенными для нанесения на резину, или иными способами) или с помощью разметки мощным лазером, а также другими известными способами.
Кроме того, система, вероятно, позволит изменить устройство для получения образа подошвы, то есть сканер, на устройство, в котором имеются только компоненты, связанные с техническим зрением, то есть группа камер, снабженных соответствующей оптикой, и недорогие осветительные устройства, имеющиеся на рынке, и эти компоненты объединяются в корпусе, геометрия которого позволяет нужным образом управлять светом, освещающим мембрану, окружающую подошву стопы пациента, и отражающимся к камерам. Расположение этих элементов освещения в корпусе должно позволять избежать прямого облучения объекта и получать в камере (камерах) четкие и равномерно освещенные изображения с должной интенсивностью освещения регулярно расположенных линий-маркеров при их деформации, обусловленной геометрией стопы, при этом следует избегать нежелательных отражений света и высоких градиентов освещенности.
Таким образом, оборудование позволяет полностью получить цифровое плоскостное представление геометрии стопы при регулируемом натяжении мембраны с использованием фотограмметрии и без применения геометрического упорядочения источников света, достаточно быстро и в благоприятных с медицинской точки зрения условиях, поскольку, как упоминалось выше, геометрия подошвы стопы снимается при отсутствии давления нагруженной стопы на стекло, но и не тогда, когда ненагруженная стопа находится в воздухе без опоры на какую-либо поверхность, как для сканеров, отвечающих данному уровню техники.
Краткое описание чертежей
Для полноты данного описания и лучшего понимания признаков (особенностей) изобретения два приводимых варианта осуществления изобретения сопровождаются следующими чертежами, составляющими неотъемлемую часть данного описания, которые иллюстрируют изобретение, но не являются ограничительными.
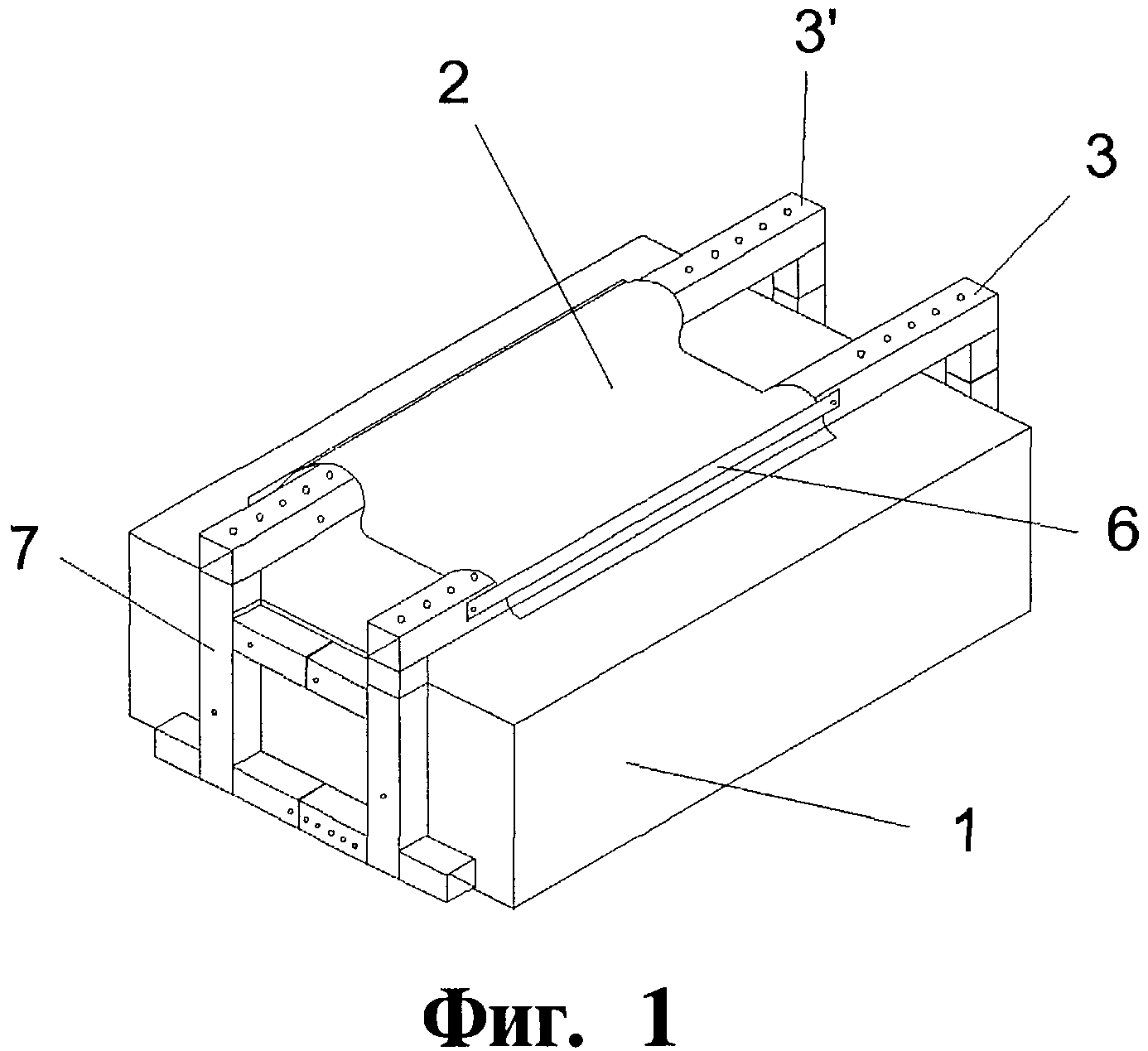
Фиг.1 - общий вид устройства, описываемого в изобретении, без подвижных горизонтальных штанг.
Фиг.2 - общий вид устройства, в котором подвижна одна из горизонтальных штанг, имеющая храповую защелку, предотвращающую нежелательное перемещение.
Фиг.3 - вид устройства, описываемого в изобретении, в котором вместо лазера применяется защитное стекло (14), под которым расположена группа камер (10, 11, 12, 13), служащих для получения изображений.
Фиг.4 - вид нижней стороны мембраны (2) данного изобретения, где показана одна из возможных конфигураций линий (21) в центральной зоне мембраны, линия (22), имеет большую толщину, чем остальные линии. Зоны (23, 23') служат для закрепления на горизонтальных штангах (3, 4) при натяжении для обеспечения неподвижности мембраны при получении образа.
Осуществление изобретения
Два следующих примера представляют два предпочтительных варианта изобретения, каждый из примеров не является ограничительным для другого.
Пример 1
Этот пример осуществления изобретения включает способ получения образа с использованием устройства, в котором имеется средство для закрепления и натяжения эластичной мембраны, а также двустороннюю механическую обработку стельки, образ которой получен, и включает следующие операции:
- установку на сканере средства для закрепления и натяжения мембраны, представляющего собой две горизонтальные штанги, положение которых можно регулировать,
- регулирование указанных горизонтальных штанг по высоте и расстоянию между ними,
- установку мембраны на средство для закрепления,
- закрепление мембраны с помощью Т-образных полос, прикрепленных к горизонтальным штангам,
- регулирование натяжения мембраны с помощью рычага, находящегося на конце одной из горизонтальных штанг,
- установку стопы на мембрану и получение образа подошвы,
- двустороннюю механическую обработку стельки на основе образа подошвы, представленной в формате STL, посредством приспособления для закрепления и вращения призматических деталей (то есть деталей, образованных движением некоторой плоской геометрической фигуры вдоль направляющей кривой) на многоцелевом станке.
Для изменения натяжения мембраны необходимо удалить стопу из устройства, но вращающиеся элементы могут обеспечивать натяжение, когда пациент находится на нем.
Устройство для осуществления способа получения образа подошвы представляет собой конструкцию, состоящую из группы опорных штанг (7), на которых находятся две горизонтальные штанги (3-3'), проходящие вдоль сканера (1) от одной его стороны до другой, эти горизонтальные штанги являются регулируемыми по высоте и расстоянию между ними благодаря возможности раздвижения опорных штанг (7). Эластичная мембрана (2) помещается на горизонтальные штанги (3-3'), закрепляется с помощью Т-образных полос (6), находящихся на горизонтальных штангах (3-3'), и натягивается с помощью рукоятки (5).
Горизонтальные штанги (3-3') могут быть вращающимися, то есть (как в другом предпочтительном варианте) по крайней мере одна из указанных горизонтальных штанг является цилиндрической и может вращаться с помощью рычага (5). Эти штанги показаны на фиг.2 как (4).
Чтобы избежать нежелательного вращения при сканировании, горизонтальная штанга (4) снабжена храповым механизмом (8) на одном конце.
Мембрана (2), применяемая при этом способе, может быть выполнена из любого материала, характеристики эластичности и прочности которого аналогичны характеристикам натурального каучука и силикона, и может иметь любой светлый цвет, позволяющий визуализировать стопу с помощью сканера.
Когда образ подошвы получен, образ в формате STL поступает для изготовления на многоцелевой станок, в котором применяется приспособление закрепления и вращения призматических деталей, позволяющая вращать указанные детали на угол до 180°, и для этой цели выполняются следующие операции:
- получение контура стельки, эта операция очень важна, так как дальнейшие вычисления траекторий движения режущего инструмента и финальная операция вырезания стельки из заготовки основаны на этой информации,
- получение траекторий режущего инструмента,
- проектирование точек траекторий на поверхность, полученные точки двумерных траекторий проектируются на трехмерную поверхность для получения координат точек на поверхности,
- вычисление конечной траектории, максимальная допустимая высота неровностей и диаметр фрезы определяют шаг обработки (расстояние между соседними траекториями) и минимальное число шагов, таким образом, чем меньше допустимая высота неровностей, тем выше качество конечной обработки и тем больше число шагов и время механической обработки,
- просверливание отверстий для вентиляции, конкретная зона стельки (вблизи плюсны и дальше нее от основания) размечается, и в ней просверливается ряд сквозных отверстий,
- вырезание стельки, которое выполняется по контуру с помощью режущего инструмента, причем центр инструмента удерживается на расстоянии от указанного контура, равном радиусу инструмента.
Пример 2
В этом примере усовершенствована система получения образов, усовершенствования затрагивают устройство для получения образов, прежде всего сканер (1), а именно сканер (1) может представлять собой группу камер (10, 11, 12, 13), которые получают образ в реальном масштабе времени, к конструкции добавляется защитное стекло (14), предпочтительно противоотражательное. Способ является в общем динамическим, так как при натяжении мембраны (2) выполняется наблюдение изменений образа.
Расположение камер (10, 11, 12, 13) может отхватывать все поле измерений, так что возможно выявление наиболее сильно влияющих искажений. Для этого предпочтительно разместить четыре камеры, как показано на фиг.3, но указанное число камер может изменяться.
Другие усовершенствования, предложенные для первого примера, касаются мембраны (2). Мембрана (2), применяемая в данном способе, может быть изготовлена из любого материала, обладающего характеристиками эластичности и прочности, аналогичными характеристикам натурального каучука, силикона, латекса или тканым материалам, материал может также иметь любой цвет, не обязательно отличный от какого-либо чистого цвета. Эластичность материала позволяет мембране адаптироваться к геометрической форме, которая должна быть оцифрована, а маркеры, представляющие собой линии или геометрические элементы других видов, могут быть видимы камерами (10, 11, 12, 13). Новый признак (особенность) такой мембраны (2) состоит в свойствах ее нижней стороны, на которой имеются линии (21), снабженные маркерами, или геометрические элементы любого другого типа, некоторым образом ориентированные, играющие роль мишеней, которые могут дополнительно представлять собой несколько линий (22), среди которых есть линии различной толщины, и это различие достаточно выражено, что позволяет эффективно проводить измерения стопы. Зоны (23, 23') предназначены для закрепления на горизонтальных штангах (3, 4) с целью натяжения и обеспечения неподвижности мембраны (2).
Направление линий (21) на рисунке, наносимом на мембрану, может быть рассчитано так, чтобы способ идентификации соответствующих друг другу точек линий на полученных изображениях в наибольшей мере уменьшал число пересечений этих линий с эпиполярными линиями. Это упрощает алгоритмы корреляционных вычислений, относящихся к линиям, проводимых перед выполнением триангуляции, но не является строго обязательным, так как проблему можно также решить с помощью более сложных алгоритмов, которые, однако, замедлят процесс измерений.
Как упоминалось выше, из линий, нанесенных на мембрану, некоторые могут иметь большую или меньшую толщину, что упрощает вычисления, относящиеся к установлению соответствий между линиями. Эти линии показаны как линии (22) на фиг.4.
Важно отметить, что данное устройство дает возможность реализовать способ как динамический, то есть, таким образом, что при натяжении мембраны (2) изменение образа прослеживается в реальном масштабе времени.
Когда образ подошвы получен, образ в формате STL передается для изготовления посредством механической обработки на многоцелевой станок, в котором используется приспособление закрепления и вращения призматических деталей, допускающее вращение указанных деталей на угол до 180°, этот способ описан в Примере 1.
Реферат
Способ изготовления стельки включает использование устройства, снабженного средством закрепления и натяжения эластичной мембраны, и использование образа подошвы для двусторонней механической обработки стельки, при этом средство закрепления и натяжения мембраны выполняют в виде двух горизонтальных штанг с возможностью регулирования их положения и устанавливают на сканере, затем регулируют положения указанных горизонтальных штанг по высоте и расстоянию между ними, устанавливают мембрану на средство закрепления мембраны, закрепляют мембрану посредством Т-образных полос, связанных с горизонтальными штангами, регулируют натяжение мембраны посредством рычага, расположенного на конце одной из указанных горизонтальных штанг, устанавливают стопу на мембрану и получают образ подошвы в формате STL и двусторонне механически обрабатывают стельку на основе указанного образа, представленного в формате STL. Технический результат заключается в обеспечении равномерного напряжения по всей площади подошвы стопы. 2 н. и 12 з.п. ф-лы, 4 ил.
Комментарии