Проприоцептивное/кинестетическое устройство и способ - RU2343946C2
Код документа: RU2343946C2
Чертежи








Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству для тренировки, развития и улучшения проприоцептивных и кинестетических навыков, нервно-мышечного управления и устойчивости корпуса.
УРОВЕНЬ ТЕХНИКИ
Проприоцепция относится к способности определять, где в пространстве находится часть тела, и распознавать движения частей тела (таких, как пальцы на руках и ногах, стопы и кисти рук, ноги и руки). Кинестезия является родственным термином и относится к ощущению, которым воспринимаются положение, вес, напряжение мускулов и движение. Иногда в медицинской литературе проприоцепция относится к сознательному и бессознательному ощущению положения суставов, в то время как кинестезия относится к ощущению скорости и ускорения суставов. Проприоцепция часто используется наряду с кинестезией, и здесь термины также используются на основе взаимозаменяемости. (В описании и формуле изобретения термин "проприоцепция" используется для обозначения проприоцепции, кинестезии, устойчивости корпуса и т.п.)
Нервно-мышечная система управления телом объединяет периферические ощущения, относящиеся к нагрузкам суставов, и преобразует эти сигналы в координированные двигательные реакции. Эта мускульная деятельность служит для защиты суставных структур от излишних напряжений.
В мягких тканях скелетно-мышечной системы присутствуют определенные механорецепторы, которые взаимодействуют с центральной нервной системой и координируют движения тела, осанку и равновесие. Механорецепторы расположены в мускулах, сухожилиях, связках, суставных капсулах и коже. Эти нервные волокна передают мозгу информацию, относящуюся к состоянию и функционированию скелетно-мышечной системы. Механорецепторы посылают электрические сигналы по периферическим нервам к спинному мозгу. Электрические сигналы проходят через спинной мозг к головному мозгу, где сигналы расшифровываются, чтобы распознать движения частей тела, напряжение мускулов, движение и т.п.
Некоторые примеры механорецепторов для управления мышечной системой включают мышечное веретено. Мышечное веретено разбросано среди сокращающихся волокон скелетных мышц, с наибольшей концентрацией в центральной части каждого мускула. Волокна веретенообразных мускулов отвечают за изменения длины мускулов. Эти нервные окончания обеспечивают центральную нервную систему информацией, используемой для поддержания мышечного тонуса и корректирования мускульного напряжения на противоположных сторонах каждого сустава.
Волокнистые ткани, которые окружают и защищают большинство суставов, содержат множество чувствительных нервных окончаний для проприоцепции и кинестезии. Входной сигнал от этих чувствительных нервных окончаний обеспечивает центральную нервную систему информацией, относящейся к положению, растяжению, сжатию, напряжению, ускорению и вращению сустава.
Стопа является анатомической областью, которая содержит второе наибольшее количество проприоцептивных или кинестетических сенсорных рецепторов в теле (наибольшее количество - в спинном мозге).
Хорошо известны проприоцептивные и кинестетические упражнения и устройства для упражнений, предназначенные для улучшения ловкости, равновесия и координации, и для реабилитации людей, чья проприоцептивная способность ухудшилась после несчастных случаев или болезни. Один такой класс устройств для упражнений включает ортостатические доски, где пациент стоит на доске или подобной платформе, которая имеет смонтированный под ней шар. Благодаря присутствию шара доска не лежит горизонтально, и это требует от пациента способности балансировать и выполнять маневры на платформе. Повторяющиеся упражнения на ортостатической доске могут использоваться для развития или реабилитации проприоцепции и нервно-мышечного управления пациента, а также для укрепления мускулов, сухожилий и соединительных тканей в области стопы.
Другие известные проприоцептивные и кинестетические устройства для упражнений включают ботинок с шаром, смонтированным под его подошвой. Ботинок с шаром используется аналогично ортостатической доске. Ботинок другого вида имеет смонтированный под его подошвой стержень, используемый для усиления сгибающих мышц.
Еще одно проприоцептивное и кинестетическое устройство для упражнений описано в патенте США 6283897, выданном Патону (Patton). Это устройство состоит из одного или более штифтов, выступающих вверх из панели основания. Штифты имеют закругленный верх и сидят в вогнутых углублениях в дне чехла, имеющего форму сандалии. В частности, дно подошвы ботинка имеет три вогнутых полусферических углубления, одно из которых находится в пяточной части, одно непосредственно под подъемом свода стопы и одно расположено в центре. Ступня пользователя может поддерживаться эластичными лентами, когда он поворачивает ступню и/или бедра, чтобы развивать силу, диапазон движения и проприоцепцию лодыжки и бедер.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в создании нового проприоцептивного и кинестетического устройства для упражнений, которое имеет значительные преимущества перед устройствами предшествующего уровня техники, такими как ортостатические доски или ботинки с одним выступом. Как описано более подробно ниже, в одном варианте настоящего изобретения предложена обувь, которая вместо одного шара, как у досок и ботинок предшествующего уровня техники, имеет два бульбообразных выступа, выступающих из ее нижней части. Дополнительный выступ может значительно увеличить возможности и приспособляемость к ходьбе, а также ускорить и улучшить результаты планов проприоцептивного и кинестетического лечения. Предлагаются также другие проприоцептивные и кинестетические устройства для упражнений, такие как новые бегущие дорожки, поверхности для упражнений, велотренажеры, тренажеры для шагания, лыжные машины или эллиптические машины для упражнений, как описано более подробно ниже.
Предложенное устройство можно использовать в проприоцептивном, нервно-мышечном управлении и координационных упражнениях, в обучении детей и атлетов, для развития и улучшения проприоцептивной и кинестетической способности. Изобретение может использоваться для упражнений и тренировок с целью предотвращения травм у атлетов и не атлетов. Изобретение может использоваться для работы над устойчивостью корпуса для устойчивости области спины и бедер, для предотвращения, остановки или уменьшения боли в спине. Изобретение может использоваться для упражнений и обучения людей, у которых были в прошлом травмы лодыжки, колена, бедра и спины (или другие повреждения), чтобы предотвратить в будущем повторение таких травм. Изобретение может использоваться для обучения и тренировок людей с физическими недостатками (например, церебральными или неврологическими болезнями или другими расстройствами). Пользователь предлагаемых устройств может двигаться с шестью степенями свободы (перемещение в трех взаимно ортогональных направлениях (х, у, z) и вращение вокруг этих осей (азимут, возвышение, крен)). Все учебные и тренировочные занятия включают создание неустойчивости для человека во время движения, в частности, перемещения - ходьбы, бега или другого движения.
Выполненное в соответствии с вариантом настоящего изобретения устройство для упражнений содержит поверхность для контакта со ступней, приспособленную для опоры ступни пользователя, привод, предназначенный для перемещения контактной поверхности во время упражнений, и толкающий механизм, способный нарушать равновесие пользователя на поверхности контакта со ступней.
В соответствии с вариантом настоящего изобретения толкающий механизм предназначен для перемещения пользователя с шестью степенями свободы, включая перемещение в трех взаимно ортогональных направлениях и вращение вокруг этих осей.
Также в соответствии с вариантом настоящего изобретения предложен способ, включающий в себя выполнение проприоцептивного упражнения, содержащего преодоление нарушающей равновесие силы при перемещении с совершением поступательного перемещения.
Также в соответствии с вариантом настоящего изобретения, предложен способ, включающий выполнение упражнения на тренажере, в котором вначале отсутствуют нарушающие равновесие силы, и намеренное приложение такой силы во время упражнения на тренажере.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение можно понять и оценить более полно из следующего подробного описания вместе с прилагаемыми чертежами, на которых:
фиг.1 является упрощенным видом в аксонометрии обуви, сконструированной и работающей в соответствии с вариантом выполнения настоящего изобретения;
фиг.2 и 3 являются схематическими видами соответственно сбоку и сзади обуви на фиг.1;
фиг.4 является схематическим видом сверху обуви на фиг.1, показывающим дальнейшие свойства других вариантов выполнения настоящего изобретения;
фиг.5 является схематическим видом в аксонометрии бегущей дорожки, сконструированной и работающей в соответствии с вариантом выполнения настоящего изобретения;
фиг.6 является схематическим видом в аксонометрии поверхности для упражнений, сконструированной и работающей в соответствии с вариантом выполнения настоящего изобретения;
фиг.7 является схематическим видом в аксонометрии велотренажера, сконструированного и работающего в соответствии с вариантом выполнения настоящего изобретения;
фиг.8 является схематическим видом в аксонометрии тренажера для шагания на месте, выполненного и работающего в соответствии с вариантом выполнения настоящего изобретения;
фиг.9 является схематическим видом в аксонометрии лыжной машины, сконструированной и работающей в соответствии с вариантом выполнения настоящего изобретения;
фиг.10 является схематическим видом в аксонометрии эллиптической тренажерной машины, сконструированной и работающей в соответствии с вариантом выполнения настоящего изобретения; и
фиг.11 является схематическим видом в аксонометрии машины для гребли, сконструированной и работающей в соответствии с вариантом выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
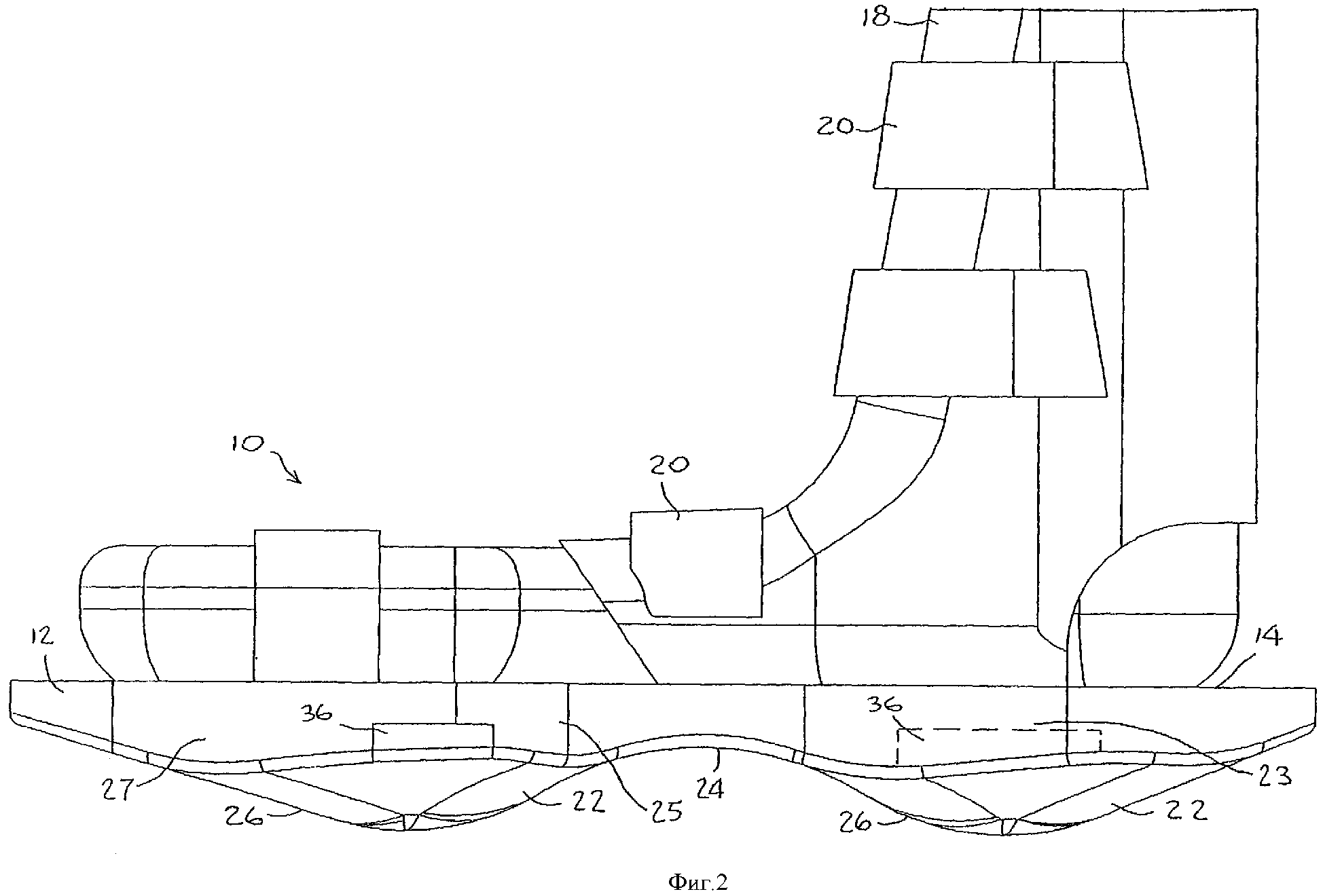
Обратимся к фиг.1-4, которые показывают обувь 10, сконструированную и работающую в соответствии с вариантом выполнения настоящего изобретения. Обувь 10 может поставляться в виде одной или более пар устройств, напоминающих ботинки или, в альтернативном случае, как только одно из устройств, подобных ботинку.
Обувь 10 предпочтительно содержит опорный элемент 12, имеющий контур в виде подошвы ботинка с верхней поверхностью 14. В показанном варианте выполнения верхняя поверхность 14 выполнена с периферической кромкой 16, но понятно, что в рамках изобретения могут быть другие конфигурации верхней поверхности 14. Обувь 10 может быть прикреплена к ступне пользователя (не показана) посредством ботинка 18 и/или застежек 20, таких как VELCRO, но не ограниченных этим, пряжками, шнурками и т.п. Ботинок 18 может быть выполнен с обеспечением присоединения к ступне пользователя застежками 20 или без них. Подобным же образом застежки 20 могут использоваться для присоединения обуви 10 к ступне пользователя без ботинка 18.
Два бульбообразных выступа 22 могут выступать из нижней поверхности 24 опорного элемента 12. В альтернативном случае выступы 22 могут выступать из верхней поверхности 14 опорного элемента 12. Каждый выступ 22 может иметь криволинейный внешний контур 26. Поперечное сечение контура 26, то есть либо сечение, взятое по отношению к продольной оси 28 (фиг.4) опорного элемента 12 (соответствующего форме, показанной на фиг.2), либо поперечное сечение, взятое по отношению к поперечной оси 30 (фиг.4) опорного элемента 12 (соответствующего форме, показанной на фиг.3), либо любое другое поперечное сечение может иметь любую криволинейную форму. Например, контуры 26 могут иметь форму конического сечения, то есть форму окружности, эллипса, параболы или гиперболы. Различные поперечные сечения контуров 26 выступа 22 могут иметь идентичные или отличающиеся формы.
Как видно отчетливо на фиг.2, выступ 22 может быть расположен последовательно за другим выступом 22. Как видно из фиг.4, выступы могут быть расположены на общей продольной оси опорного элемента 12, такой как центральная линия 28 опорного элемента 12, и на противоположных сторонах поперечной средней линии 30. Как видно из фиг.2, задний выступ 22 может быть расположен обычно под пяточной опорной частью 23 опорного элемента 12, в то время как передний выступ 22 обычно может быть расположен под плюсневой опорной частью 25 и/или фаланговой опорной частью 27 опорного элемента 12.
В альтернативном случае, как показано штриховыми линиями 33 на фиг.4, один из выступов 22 (например, передний) может быть расположен на продольной оси 34, смещенной от центральной линии 28, а задний выступ 22 может быть смещен от оси 34, например, вдоль центральной оси 28. Понятно, что выше приведены только некоторые примеры расположения выступов 22, и в рамках изобретения существует много других возможностей.
Выступы 22 могут быть выполнены из любого подходящего материала, такого как эластомеры, или металл, или комбинация материалов, хотя этим не ограничивается, и могут иметь различные свойства. Например, выступы могут иметь различную упругость или твердость, например иметь различные упругие свойства или твердость по Шору. Выступы 22 могут выступать на различные расстояния из нижней поверхности 24 опорного элемента 12.
В соответствии с вариантом выполнения настоящего изобретения один или более выступов 22 могут быть установлены на опорном элементе 12 с возможностью скольжения. Например, выступ 22 может быть установлен на дорожке 36 (фиг.2), образованной на нижней поверхности 24 опорного элемента 12, и может быть расположен по выбору где-либо вдоль дорожки и закреплен там. Дорожка 36 может проходить вдоль части подошвы ботинка или по всей длине подошвы ботинка. В альтернативном случае или дополнительно, расстояние, на которое выдается выступ 22, может регулироваться, например, посредством установки выступа 22 с помощью резьбового крепления 38 (фиг.3) к опорному элементу 12 и затягивания или отпускания этого крепления 38.
В соответствии с вариантом выполнения настоящего изобретения кроме выступов 22 могут быть выполнены один или более небульбообразных выступов 39, показанных на фиг.3. Выступы 39 могут быть образованы в форме штифта, штыря, болта, шпильки, шипа и т.п., хотя изобретение не ограничивается этими формами. Выступы 39 могут быть жесткими или гибкими. Как и выступы 22, выступы 39 могут иметь различную упругость или твердость, например могут иметь различную упругость или твердость по Шору, и они могут выступать на различные расстояния из нижней поверхности 24 опорного элемента 12. Как и выше, расстояние, на которое выдаются выступы 39, может регулироваться. Выступы 39 могут быть установлены в любом месте на нижней поверхности 24 опорного элемента 12.
Признаки, описанные выше, такие как выступы 22, установленные с возможностью скольжения на опорном элементе 12, могут быть выполнены в альтернативном варианте, где выступы 22 выходят из верхней поверхности 14 опорного элемента 12. Например, обувь 10 может иметь нормальную внешнюю подошву и иметь механизм скольжения/смещения для выступов 22 внутри подошвы обуви 10. Механизм скольжения/смещения может содержать, без ограничения, механизм, который плавает в вязком вяжущем веществе (например, в жидкости в полости, образованной в подошве) или который подвешен на внутренних тросах.
Обратимся теперь к фиг.4. В соответствии с вариантом выполнения настоящего изобретения обувь 10 может содержать гребень 40, который проходит в наружном направлении от периферии опорного элемента 12. В представленном варианте выполнения гребень 40 проходит в сторону в наружном направлении от периферии опорного элемента 12, но понятно, что гребень 40 может проходить вперед, или назад, или в любом другом направлении. Гребень 40 может быть выполнен, на одной стороне обуви 10, как показано, или на обеих сторонах. Гребень 40 может расширить диапазон проприоцептивных упражнений, возможных при помощи обуви 10, посредством обеспечения дополнительной опорной поверхности во время наклона и маневрирования с обувью 10.
Гребень 40 может быть выполнен из любого подходящего материала, такого как эластомеры, или металл, или комбинация материалов, но не ограничивается этим, и может иметь части 42 с различными свойствами. Например, части 42 могут иметь различную упругость или твердость, например иметь различающиеся упругие свойства или твердость по Шору. Части 42 гребня 40 могут иметь по-разному искривленные контуры. Гребень 40 может быть прикреплен с возможностью регулирования к опорному элементу 12, так что расстояние, на которое гребень 40 выступает от опорного элемента 12, может регулироваться.
Пользователь может прикрепить обувь 10 к своей ступне и выполнять всевозможные маневры в проприоцептивном и/или кинестетическом тренировочном плане для нижней части стопы, верхней части ноги и даже верхней части туловища и других частей тела и органов. Например, обувь 10 может использоваться для восстановления нервно-мышечного управления во время реабилитации суставов, восстановления механической и функциональной устойчивости нервно-мышечной системы, улучшения или реабилитации опережающего или запаздывающего нервно-мышечного управляющего механизма и восстановления и улучшения равновесия, осанки и устойчивости.
Обратимся теперь к фиг.5, на которой показана бегущая дорожка 50, сконструированная и работающая в соответствии с настоящим изобретением.
Бегущая дорожка 50 может содержать контактирующую с ногой бегущую поверхность 52, которая вращается вокруг пары разнесенных шкивов 54. Бегущая поверхность 52 может иметь один или более выступов 56, выступающих вверх из бегущей поверхности 52. Выступы 56 могут быть различной или подобной конфигурации (например, применительно к высоте, размеру, форме и/или наклону). Переменный размер/форма может быть достигнут(а) путем выполнения выступа 56 из надувного элемента, который может наполняться пневматически воздухом или гидравлически жидкостью (например, водой или маслом). Может иметься контроллер 58, который управляет наполнением выступов 56 и выпуском из них текучей среды. Выступы 56 и/или бегущая поверхность 52 могут иметь различные или подобные свойства материала. Например, они могут иметь разные или подобные упругость или вязкость (в наполняемом варианте) и могут быть выполнены из различных или подобных материалов.
Выступы 56 могут быть подвижными. Например, один или более выступов 56 может (могут) перемещаться в дорожке 57 (например, вперед, назад, вбок или по диагонали) и/или поворачиваться вокруг собственной или другой оси или совершать комбинацию таких движений. Может использоваться защитная полоса (не показана) для поддерживания пользователя в вертикальном положении и предотвращения случайных падений.
Обратимся теперь к фиг.6, на которой показана тренировочная поверхность 60, сконструированная и работающая в соответствии с вариантом выполнения настоящего изобретения. Тренировочная поверхность 60 может содержать один или более выступов 62, выступающих вверх из ее верхней (контактирующей с ногой) стороны. Выступы 62 могут быть разной или подобной конфигурации (например, применительно к высоте, размеру, форме и/или наклону). Выступы 62 могут иметь фиксированный размер/форму или, в альтернативном случае, могут иметь изменяющиеся размер/форму. Изменяющиеся размер/форма могут быть достигнуты посредством выполнения выступа 62 из надувного элемента, который может наполняться пневматически воздухом или гидравлически жидкостью (например, водой или маслом). Может иметься контроллер 64, который управляет наполнением выступов 62 или выпуском из них текучей среды. Выступы 62 могут иметь различную или подобную упругость или вязкость (в надувном варианте) и могут быть выполнены из различных или подобных материалов.
Выступы 62 могут быть выполнены с возможностью перемещения. Например, один или более выступов 62 могут перемещаться в дорожке 66 (например, вперед, назад, вбок, радиально или диагонально) и/или вращаться вокруг собственной или другой оси или совершать комбинацию таких движений. Пользователь тренировочной поверхности 60 может, таким образом, двигаться с шестью степенями свободы (перемещаясь в трех взаимно ортогональных направлениях (х, у, z) и вращаясь вокруг этих осей (азимут, возвышение, крен)).
Обратимся теперь к фиг.7, на которой показан стационарный велотренажер 70, изготовленный и работающий в соответствии с вариантом выполнения настоящего изобретения. Велотренажер 70 может содержать устройство с собственными педалями, колесом и датчиками (например, спидометр, одометр и т.д.) или может быть устанавливаемым в помещении велотренажером, в котором пользователь ставит велосипед на стенд, который позволяет крутить педали велосипеда, в то время как велосипед остается неподвижным. Велотренажер 70 может содержать толкающий механизм 72, соединенный с передней осью 74 или задней опорой 75 велотренажера 70, и/или толкающий механизм 76, присоединенный к сиденью 78 велотренажера 70. Толкающие механизмы могут создавать колебания, качания, толчки и другие виды нарушения равновесия пользователя велотренажера 70 (как показано стрелками на фиг.7). Толкающие механизмы могут двигать велосипедиста с шестью степенями свободы (перемещение в трех взаимно ортогональных направлениях (х, у, z) и вращение вокруг этих осей (азимут, возвышение и крен)). Толкающие механизмы в этом варианте выполнения, как и в других вариантах выполнения изобретения, могут содержать платформу, на которой устанавливается тренажерный велосипед, причем платформа обеспечивает толкающее действие с шестью степенями свободы.
Велотренажер 70 может использоваться для тренировки нервно-мышечного управления в спине, бедрах, тазе, лодыжке, колене и других частях тела посредством толчков во время езды, которые могут имитировать езду по ухабистым дорогам. Для управления работой толкающего механизма 72 может иметься контроллер 77.
Обратимся теперь к фиг.8, на которой показан тренажер 80 для шагания, сконструированный и работающий в соответствии с вариантом выполнения настоящего изобретения. Тренажер 80 может содержать контроллер 82, который изменяет силу сопротивления, передаваемую педалями 84 тренажера 80. Контроллер 82 может также изменять угол педалей 84, так чтобы создать поворот в ту или другую сторону, как показано стрелками на фиг.8. Здесь также контроллер 82 может двигать педали 84 с шестью степенями свободы (перемещение в трех взаимно ортогональных направлениях (х, у, z) и вращение вокруг этих осей (азимут, возвышение и крен)).
Обратимся теперь к фиг.9, на которой показана лыжная машина 90, выполненная и работающая в соответствии с вариантом выполнения настоящего изобретения. Лыжная машина 90 может содержать контроллер 92, который изменяет силу сопротивления, создаваемую ее лыжными платформами 94. Контроллер 92 может также изменять угол лыжных платформ 94, так чтобы создавать поворот в ту или другую сторону, как показано стрелками на фиг.9. Контроллер 92 может двигать лыжные платформы 94 с шестью степенями свободы (перемещение в трех взаимно ортогональных направлениях (х, у, z) и вращение вокруг этих осей (азимут, возвышение, крен)).
Некоторые специалисты-тренеры отмечают несколько недостатков тренировочного оборудования предшествующего уровня техники. Например, неподвижные велотренажеры могут использовать только относительно небольшое количество мускулов при довольно ограниченном диапазоне движения. Лыжные машины могут упражнять больше мускулов, чем стационарный велосипед, однако, по существу, гладкое шаркающее движение устройства может ограничивать диапазон движения некоторых мускулов, которые нужно упражнять. Устройства, имитирующие подъем по лестнице, могут упражнять больше мускулов, чем стационарные велосипеды, однако ограниченный диапазон движения вверх-вниз может не предоставить тренировки мускулам ноги в широком диапазоне движения.
С учетом этих недостатков были разработаны эллиптические тренировочные машины, которые имитируют естественную ходьбу и бег и упражняют большое количество мускулов в широком диапазоне движения. Машины обеспечивают переменное, гибко координируемое эллиптическое движение мускулов ноги. Пример одной из многих эллиптических тренировочных машин в предшествующем уровне техники описан в патенте США 5848954.
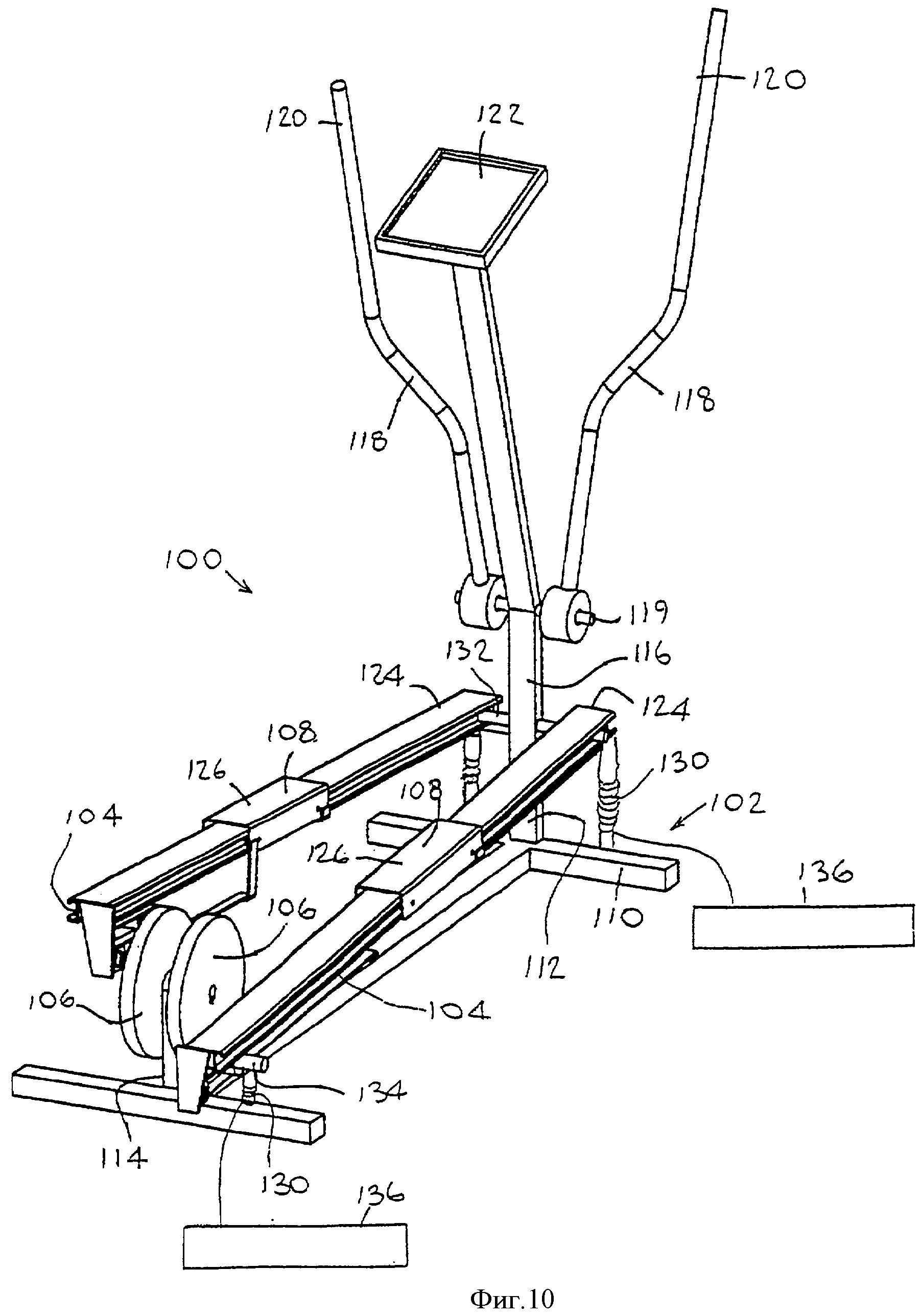
Обратимся теперь к фиг.10, на которой показана эллиптическая тренировочная машина 100, выполненная и работающая в соответствии с вариантом выполнения настоящего изобретения. Эллиптическая тренировочная машина 100 показана для удобства с некоторыми элементами, подобными элементам в патенте США 5848954, но подчеркивается, что изобретение не ограничивается этой конструкцией. Во всяком случае, проприоцептивные свойства изобретения не обнаруживаются в патенте США 5848954 или любом предшествующем уровне техники.
Эллиптическая тренировочная машина 100 может содержать раму 102 и рычажный узел 104, установленный на раме 102 с возможностью перемещения. Рычажный узел 104, как правило, может двигаться относительно рамы 102 таким образом, который связывает вращение маховика 106 с обычно эллиптическим движением воспринимающего силу элемента, или "конька" 108. Рама 102 может включать основание 110, переднюю опору 112 и заднюю опору 114.
Заметим, что термин "эллиптическое движение" используется в широком смысле, чтобы описать замкнутую траекторию движения, имеющую относительно более длинную одну ось и относительно более короткую другую ось (которая перпендикулярна первой оси). Заметим, кроме того, что в описанном варианте выполнения существует левая - правая симметрия относительно продольной оси, и "правосторонние" компоненты отличаются по фазе на 180 от "левосторонних" компонентов. Однако для обозначения как "правосторонних", так и "левосторонних" частей на эллиптической тренировочной машине 100 используются одинаковые номера позиций, и когда делается ссылка на одну или более частей только на одной стороне машины, следует понимать, что на противоположной стороне машины расположены соответствующие части.
Передняя опора 112 может проходить перпендикулярно вверх от основания 110 и поддерживать раздвижную трубку или стойку 116. К стойке 116 может быть шарнирно прикреплена пара ручек 118 на оси 119. Ручки 118 могут иметь захватные части 120. На стойке 116 может располагаться дисплей 122.
Коньки 108 могут скользить по рельсам 124. Пользователь может поместить ногу на контактную поверхность 126 конька 108.
В соответствии с вариантом выполнения настоящего изобретения машина 100 может содержать один или более толкающих механизмов 130, присоединенных к передней опоре 132 и/или задней опоре 134 рельсов 124. Толкающие механизмы 130 могут создавать колебания, качания, толчки и другие виды нарушения равновесия пользователя машины 100. Толкающие механизмы 130 могут двигать пользователя с шестью степенями свободы (перемещение в трех взаимно ортогональных направлениях (х, у, z) и вращение вокруг этих осей (азимут, возвышение и крен)). Для управления толкающим механизмом 130 может иметься контроллер 136.
Обратимся теперь к фиг.11, на которой показана гребная машина 150, выполненная и работающая в соответствии с вариантом выполнения настоящего изобретения. Гребная машина 150 может содержать рельс 152, на котором установлено с возможностью скольжения сидение 154. Рельс 152 может иметь заднюю опору 155. Рельс 152 может проходить от установленного впереди натяжного барабана 156, который может быть установлен на передней опоре 157. Вокруг натяжного барабана 156 может быть намотан трос 158. Трос 158 может быть снабжен ручкой 159. На рельсе 152 могут быть установлены опоры 160 для ног.
Пользователь (не показан) может сидеть на сиденье 154, положить ноги на опоры 160, ухватиться за ручку 159 и тянуть трос 158 в направлении задней части гребной машины 150, в наружном направлении от натяжного барабана 156. Это движение имитирует греблю веслами в лодке. Сидение 154 может скользить взад и вперед по рельсу 152 во время движений гребли. Натяжной барабан 156 сопротивляется тяговому воздействию на трос 158, благодаря чему упражняются мускулы, используемые при гребле. Натяжение в натяжном барабане 156 может регулироваться для получения нужного уровня упражнений. Может иметься контроллер 162, который изменяет силу сопротивления, создаваемую натяжным барабаном 156.
В соответствии с вариантом выполнения настоящего изобретения гребная машина 150 может содержать один или более толкающих механизмов 164, соединенных с передней опорой 157 и/или задней опорой 155 рельса 152 или с сиденьем 154. Толкающие механизмы 164 могут создавать колебания, качания, толчки и другие виды нарушения равновесия пользователя гребной машины 150. Толкающие механизмы 164 могут двигать пользователя с шестью степенями свободы (перемещение в трех взаимно ортогональных направлениях (х, у, z) и вращение вокруг этих осей (азимут, возвышение, крен)). Управлять работой толкающих механизмов 164 может контроллер 162.
Специалистам в этой области техники будет понятно, что настоящее изобретение не ограничивается тем, что, в частности, показано и описано выше. В настоящее изобретение включаются как комбинации, так и подкомбинации признаков, описанных выше, так же как их модификации и изменения, которые могут быть сделаны специалистом после прочтения данного описания и которые отсутствуют в предшествующем уровне техники.
Реферат
Обувь для проприоцептивных упражнений содержит опорный элемент, который имеет верхнюю поверхность, прикрепляемую к ступне, и два выступа, которые установлены на нижней поверхности опорного элемента и один из которых расположен ближе к задней части, чем другой выступ, указанные выступы установлены на указанной поверхности с возможностью скольжения и расположения и закрепления их по выбору. Использование данного изобретения позволяет улучшить результаты проприоцептивного и кинестетического лечения. 8 з.п. ф-лы, 11 ил.

Комментарии