Устройство крепления ботинка к спортивному изделию - RU2288017C2
Код документа: RU2288017C2
Чертежи




Описание
Предлагаемое изобретение относится к устройству крепления ботинка к спортивному изделию.
Предлагаемое изобретение может быть применено, в частности, в устройствах крепления лыжного ботинка к лыже. Это изобретение, например, может быть использовано в процессе проектирования лыжных креплений для беговых лыж, лыж, используемых для дальних горных переходов, лыж, используемых для дальних северных переходов, или лыж типа Телемарк.
Первый пример устройства лыжного крепления такого типа представляет собой лыжное крепление для беговых лыж шарнирного типа, распространяемое на рынке Заявителем под торговой маркой "SNS PROFIL". Другая разновидность крепления рассматриваемого в данном случае типа представляет собой крепление, которое описано в патенте ЕР-768103 и которое можно найти в некоторых устройствах лыжных креплений для беговых лыж, распространяемых на рынке Заявителем под торговой маркой "SNS PILOT". В обоих этих случаях лыжный ботинок шарнирно закреплен на лыже относительно поперечной оси своим передним концом, что обеспечивается благодаря системе удержания, образующей захват, в который вставляется стержень шарнирного соединения, жестко связанный с подошвой этого лыжного ботинка. Две упомянутые выше системы отличаются конструкцией упругих систем возврата лыжного ботинка в его нижнее положение.
Предлагаемое изобретение также может быть использовано в рамках устройства крепления типа того, которое описано в патентной публикации WO 00/13755, причем в этом устройстве крепления система удержания ботинка усовершенствована по отношению к предшествующим системам крепления. Действительно, движение стопы лыжника по отношению к лыже, которое контролируется при помощи системы удержания лыжного ботинка в процессе подъема пятки, представляет собой движение, которое в данном случае больше не является простым поворотом и которое в максимально возможной степени приближается к естественному движению разворачивания стопы. Устройство крепления аналогичного типа, специфическим образом ориентированное на продолжительные лыжные переходы в горных условиях или на Телемарк, описано в патентном документе ЕР-А1-890379. Принцип действия подобных устройств крепления состоит в том, чтобы обеспечить возможность крепления лыжного ботинка к лыже, которое будет совершенно жестким на кручение, но которое обеспечивает возможность свободного подъема пятки данного лыжного ботинка.
Предлагаемое изобретение также может быть использовано в рамках устройства крепления типа того, различные варианты реализации которого описаны в патентных публикациях WO 96/37269, ЕР-0.914844 и WO/0193963.
Техническая задача предлагаемого изобретения состоит в том, чтобы внести определенные усовершенствования во все эти типы конструкций лыжных креплений, общим для которых является то, что все они имеют систему удержания лыжного ботинка, независимую от системы его упругого возврата. Действительно, в частности при использовании беговых лыж, необходимо, чтобы лыжное крепление содержало систему упругого возврата, которая переводит лыжный ботинок в его нижнее положение, соответствующее такому его положению, когда этот ботинок опирается на лыжу своей передней частью и своей задней частью. Эта система упругого возврата должна быть достаточно мощной для того, чтобы быстро перевести лыжный ботинок в это нижнее положение. Например, в процессе движения коньковым шагом на беговых лыжах этот упругий возврат происходит в том случае, когда в конце толчка лыжник собирается перенести лыжу вперед, приподнимая ее от поверхности снега. В этом случае оказывается, что упомянутая система упругого возврата должна вернуть переднюю часть лыжи в верхнее положение по отношению к положению ботинка лыжника. Если этот возврат является недостаточно мощным, передний носок лыжи будет задерживаться с поднятием и возникает опасность его зацепления за снег, что существенно мешает продвижению лыжника вперед. Однако эта система упругого возврата должна обеспечивать удовлетворительную плавность увеличения усилия в функции угла подъема соединительного органа и ее действие больше не должно противодействовать со слишком большим сопротивлением движению развертывания стопы. Другое ограничение, которому должна соответствовать эта система упругого возврата, состоит в том, чтобы иметь не слишком большие габаритные размеры и не слишком большой вес.
И наконец, с конструктивной точки зрения упругая система возврата должна удовлетворительным образом интегрироваться в остальную часть устройства лыжного крепления.
Лыжные крепления, в которых применяется предлагаемое изобретение, следует отличать от лыжных креплений с тросиками, которые описаны, например, в патентных документах US-3863942, WO-99/02226, FR-2363341 или US-3844575. Эти лыжные крепления с тросиками обычно предназначены для использования на горных лыжах или лыжах Телемарк. В любом случае эти лыжные крепления содержат упор, выполненный в передней части крепления, и тросик, который предназначен для оборачивания вокруг задней части лыжного ботинка и подвергается натяжению для того, чтобы продвинуть этот ботинок в направлении вперед вплотную к упомянутому упору. Даже в том случае, когда этот тросик имеет возможность создавать определенный эффект упругого возврата, этот эффект не является главным результатом, которого добиваются в данном устройстве лыжного крепления, и этот эффект упругого возврата обычно проявляется только на конечной стадии изгиба лыжного ботинка. Действительно, упомянутый тросик главным образом выполняет функцию органа удержания лыжного ботинка в составе системы удержания, образованной упомянутым упором и этим тросиком. Таким образом, поскольку упомянутый тросик разработан в первую очередь для выполнения своей функции удержания лыжного ботинка, упругий возврат реализован с точностью до точки изгиба лыжного ботинка, которая практически представляет собой центр вращения при движении пятки этого ботинка по отношению к лыже. Из сказанного выше следует, что поскольку этот упругий возврат реализуется по существу на уровне этого центра вращения, упомянутый тросик передает пружине только лишь небольшое смещение и изменение этого смещения по отношению к угловому положению пятки ботинка варьируется лишь в незначительной степени, причем это изменение фактически не поддается контролю. Таким образом, изменение возвратного усилия в данном случае не может контролироваться надлежащим образом. Для некоторых положений лыжного ботинка это возвратное усилие может быть практически нулевым, и даже отрицательным. Кроме того, оказывается, что практически невозможно осуществлять упомянутый выше контроль в том случае, когда система удержания и система упругого возврата не являются независимыми друг от друга, как это имеет место в лыжных крепления с тросиками в соответствии с существующим уровнем техники в данной области, в которых, при отсутствии упомянутых тросиков, лыжный ботинок уже не удерживается на лыже.
Описанная техническая задача решается за счет того, что в устройстве крепления ботинка к спортивному изделию, например лыже, содержащем систему удержания, при помощи которой упомянутый ботинок закрепляется на лыже с возможностью его перемещения по отношению к ней в диапазоне между нижним положением и его верхним положением, и включающем систему упругого возврата этого ботинка в направлении его нижнего положения, причем в этом устройстве упомянутая система удержания выполнена независимой от упомянутой системы упругого возврата, согласно изобретению упомянутая система упругого возврата содержит по меньшей мере:
- один упругий орган, который связан с упомянутым спортивным изделием;
- один упругий связующий элемент, который, непосредственно или косвенно, соединяет упомянутый упругий орган с ботинком и который взаимодействует с по меньшей мере одним направляющим передаточным органом.
Предпочтительно упругий связующий элемент представляет с одной и с другой стороны от упомянутого направляющего передаточного органа часть, которая соединена с упругим органом и которая проходит по существу по горизонтальному направлению, и часть, которая связана с ботинком и которая проходит в направлении, по существу параллельном направлению относительного движения этого ботинка по отношению к данному устройству крепления.
Предпочтительно направляющий передаточный орган является шкивом.
Предпочтительно направляющий передаточный орган представляет собой искривленную поверхность скольжения, на которую опирается и по которой скользит упомянутый гибкий связующий элемент.
Предпочтительно гибкий связующий элемент является тросиком.
Предпочтительно гибкий связующий элемент является лентой, работающей на растяжение.
Предпочтительно устройство включает соединительный орган связи с ботинком, который предназначен для зацепления с этим ботинком, при этом упомянутый гибкий связующий элемент связан с упомянутым соединительным органом.
Предпочтительно соединительный орган содержит крюк, который связан с устройством крепления только при помощи гибкого связующего элемента и который предназначен для соединения с планкой зацепления ботинка.Предпочтительно при отсутствии в нем ботинка крюк выполнен с возможностью автоматического перевода системой упругого возврата в положение покоя, которое является заданным в результате взаимодействия этого крюка с дополняющими его формами упомянутого устройства крепления.
Предпочтительно устройство содержит механизм открытия, который приводит в движение крюк от его положения покоя в направлении освобожденного положения ожидания, которое позволяет установить ботинок в данное устройство крепления, при этом в том случае, когда крюк возвращается в свое положение покоя, планка зацепления ботинка располагается на траектории перемещения крюка для обеспечения его зацепления за планку.
Предпочтительно система удержания образована зажимной губкой, предназначенной для размещения на ней стержня сочленения ботинка с устройством крепления в виде шарнира.
Предпочтительно соединительный орган представляет собой часть системы удержания и имеет возможность перемещаться по отношению к упомянутому спортивному изделию в диапазоне между его нижним положением и его верхним положением, причем ботинок предназначен для зацепления за упомянутый соединительный орган, при этом упомянутый гибкий связующий элемент системы упругого возврата связывает упругий орган с соединительным органом для того, чтобы возвращать упомянутый соединительный орган и ботинок в их нижнее положение.
Предпочтительно соединительный орган связан с упомянутым спортивным изделием при помощи направляющего механизма.
Предпочтительно направляющий механизм содержит по меньшей мере одну тягу, шарнирно закрепленную на данном спортивном изделии.
Предпочтительно упомянутый шкив является коаксиальным по отношению к оси шарнирного соединения тяги с упомянутым спортивным изделием.
Предпочтительно устройство содержит основание, которое жестко связано с упомянутым спортивным изделием, при этом упругий орган связан с упомянутым спортивным изделием посредством упомянутого основания.
Предпочтительно соединительный орган содержит выпуклую поверхность, которая упирается в упомянутое спортивное изделие.
Предпочтительно устройство содержит, в дополнение к упругой системе возврата, жесткий или упругий упор, действующий в конце рабочего хода движения ботинка.
Предпочтительно устройство содержит механизм регулирования жесткости используемого упругого органа.
Предпочтительно механизм регулирования жесткости упругого органа дает возможность установить более или менее значительное предварительное натяжение этого упругого органа.
Предпочтительно направляющий передаточный орган и конец гибкого связующего элемента, который соединен с ботинком, располагаются на относительно небольшом расстоянии друг от друга.
Предпочтительно конец гибкого связующего элемента, соединенный с ботинком, и направляющий передаточный орган располагаются в непосредственной близости от зоны плюсневого сустава стопы пользователя в том случае, когда ботинок находится в своем нижнем положении.
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже описания примера его реализации, где даются ссылки на приведенные в приложении фигуры, среди которых:
- Фиг.1 - схематический вид сбоку первого варианта реализации устройства крепления в соответствии с предлагаемым изобретением, иллюстрирующий это устройство в его верхнем положении;
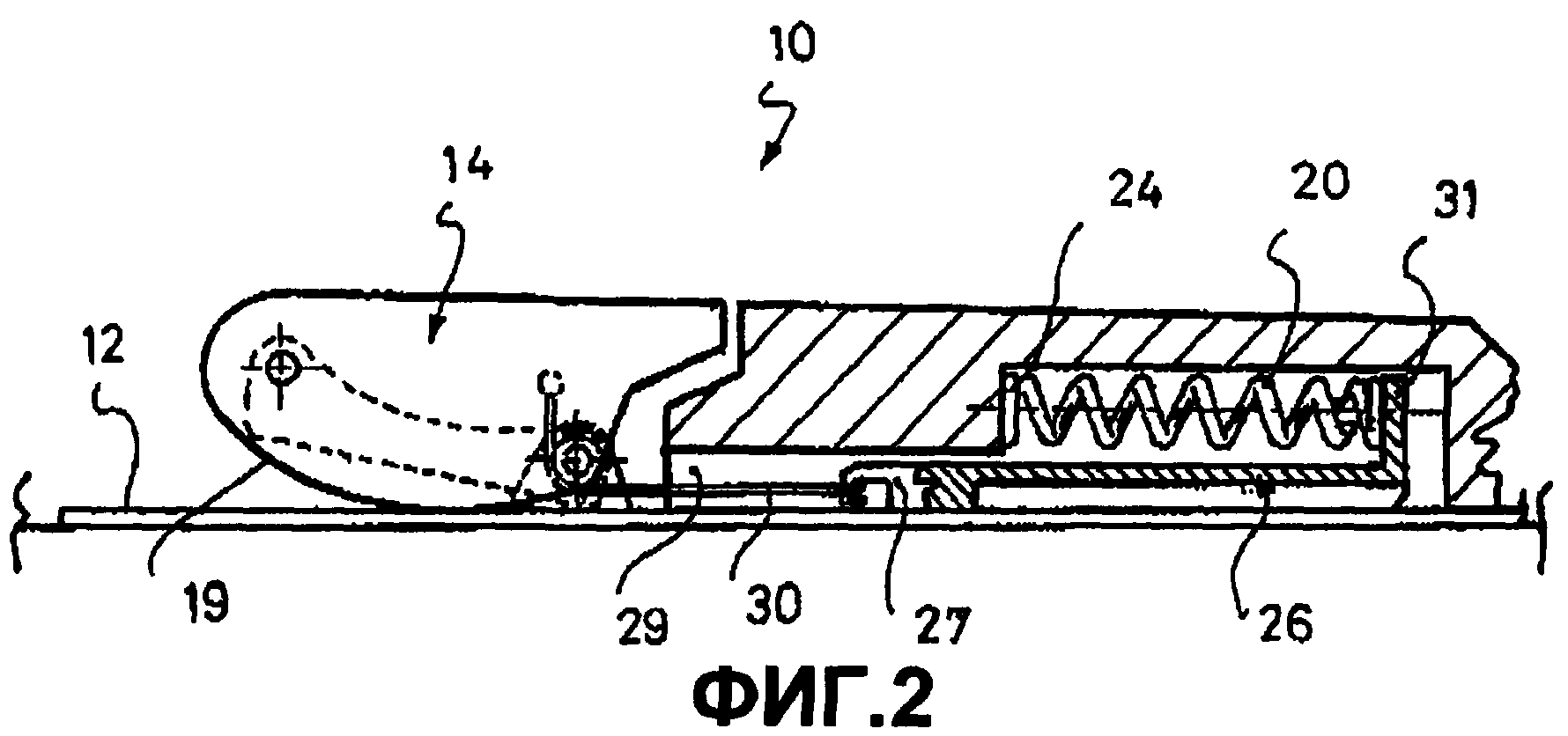
- Фиг.2 - схематический вид сбоку устройства, показанного на фиг.1, иллюстрирующий это устройство в его нижнем положении;
- Фиг.3 - схематический вид, подобный виду, показанному на фиг.1, и иллюстрирующий усовершенствованный вариант первого способа реализации устройства в соответствии с предлагаемым изобретением;
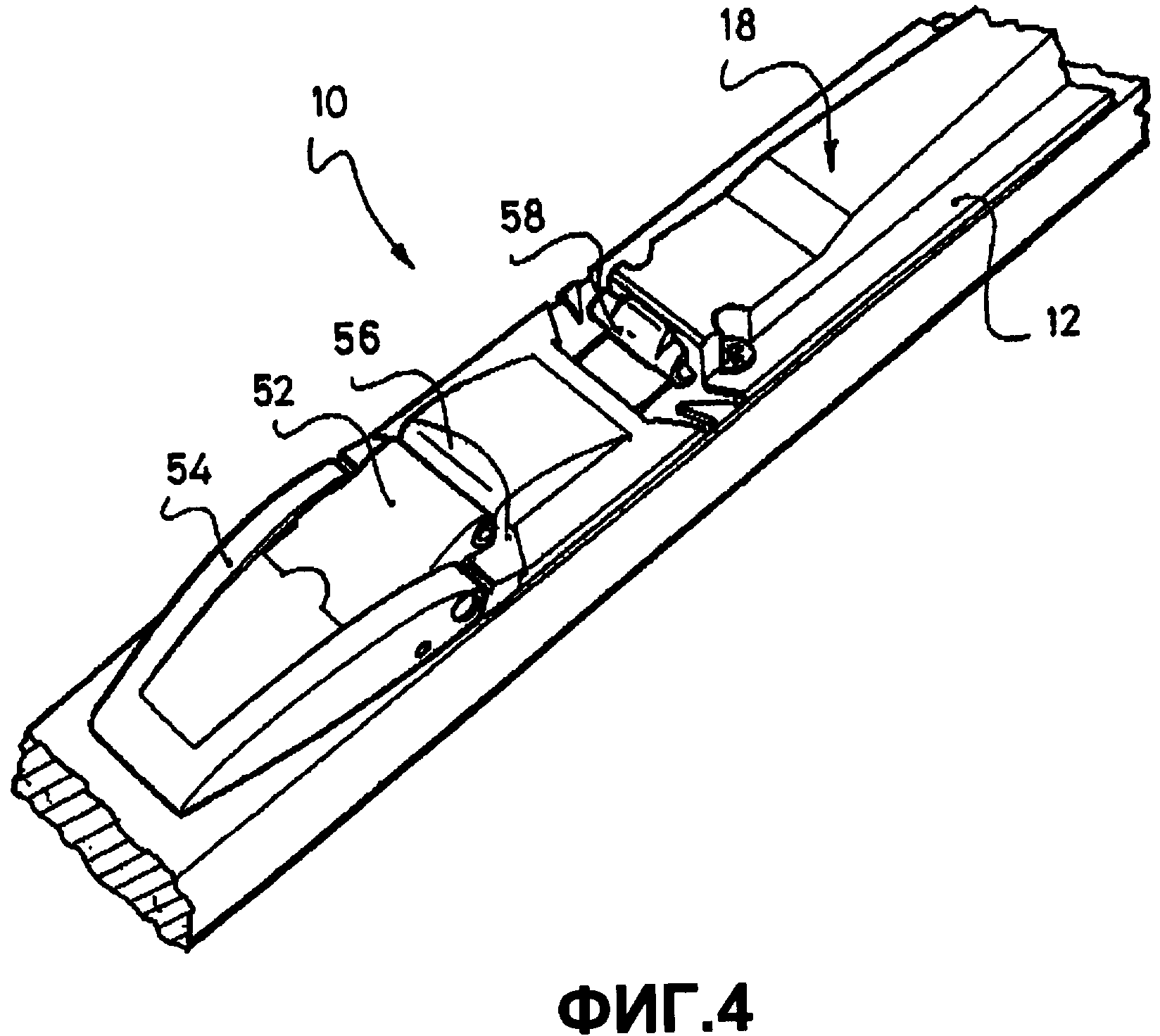
- Фиг.4 - схематический перспективный вид второго варианта реализации предлагаемого изобретения;
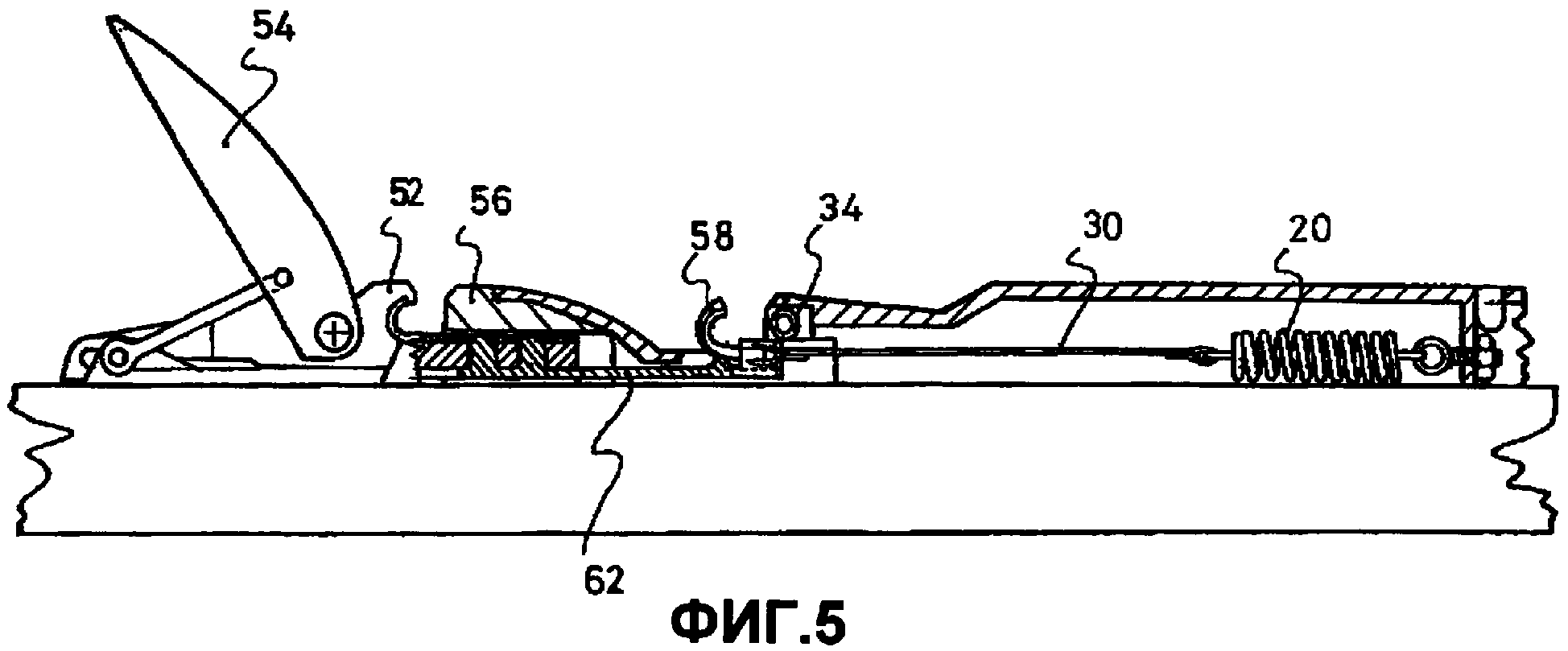
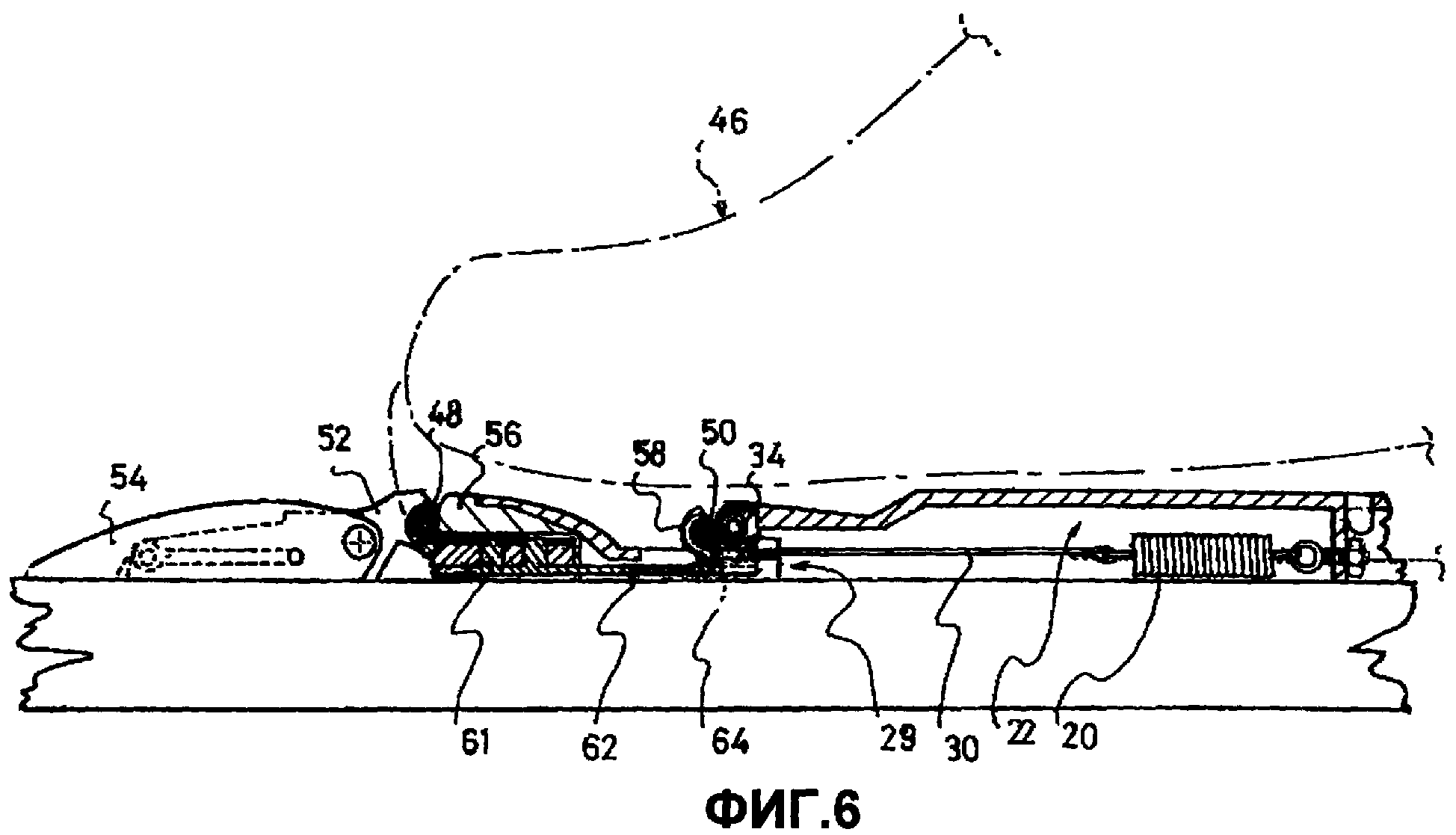
- Фиг.5, 6 и 7 - схематические виды в частичном продольном разрезе второго способа реализации предлагаемого изобретения, показанного соответственно в открытом положении перед введением ботинка и в закрытом положении, когда ботинок располагается в своем нижнем положении и в своем верхнем положении;
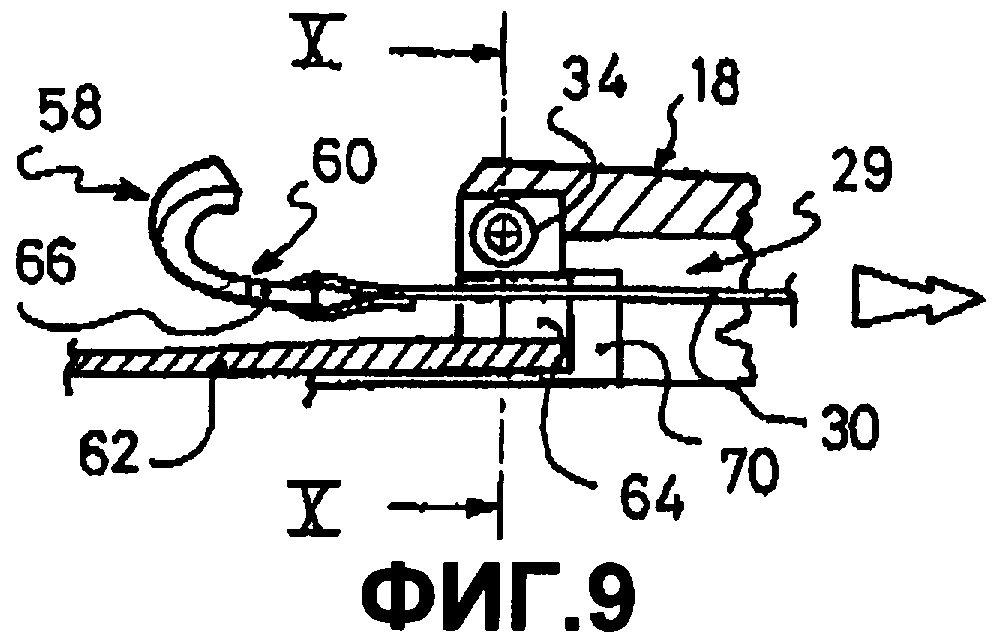
- Фиг.8 и 9 - схематические виды сверху и сбоку, показывающие, каким образом в результате взаимодействия дополняющих друг друга форм крюк системы упругого возврата во втором варианте реализации предлагаемого изобретения систематически переводится в свое предварительно определенное положение;
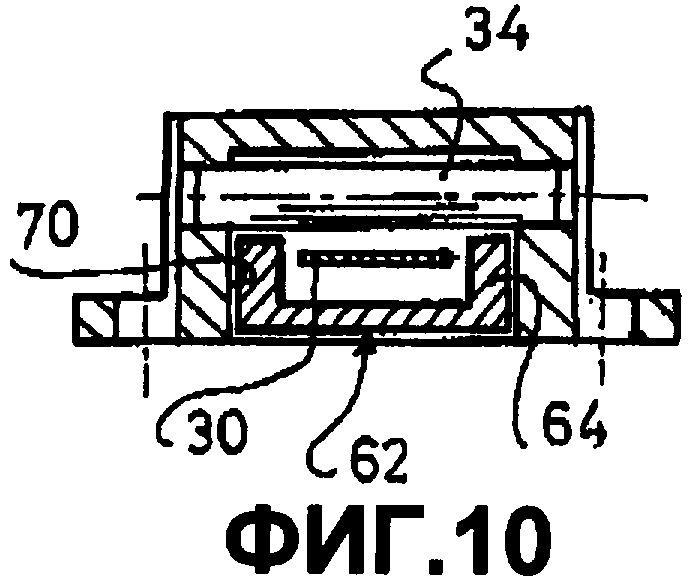
- Фиг.10 - схематический вид в разрезе по линии Х-Х, показанной на фиг.9;
- Фиг.11 - схематический вид, аналогичный виду, показанному на фиг.7, и иллюстрирующий вариант реализации предлагаемого изобретения, в соответствии с которым реализован упругий упор в конце рабочего хода ботинка.
В последующем описании данное изобретение будет раскрыто для вариантов его реализации, согласно которым предлагаемое устройство крепления специфически предназначено для использования на беговых лыжах.
Первый пример реализации устройства крепления 10 в соответствии с предлагаемым изобретением, схематически показанный на фиг.1-3, содержит основание 12, которое предназначено для закрепления на соответствующем спортивном изделии (на приведенных в приложении фигурах не показано), но которое также может быть непосредственно интегрировано в это спортивное изделие. В этом первом примере реализации предлагаемое устройство 10 содержит соединительный орган 14, который предназначен для зацепления с ботинком (при помощи не показанных на приведенных в приложении фигурах средств). Это зацепление может быть реализовано при помощи съемной системы взаимодействия, не показанной на приведенных в приложении фигурах, которая предпочтительным образом будет представлять собой систему взаимодействия типа "step-in", причем в этой системе зацепление ботинка с упомянутым соединительным органом 14 осуществляется автоматическим образом в результате простого механического контакта между ними. При этом их расцепление, в случае необходимости, может потребовать соответствующего воздействия руки пользователя.
Как об этом сказано в патентной публикации WO 00/13755, к которому полезно обратиться для лучшего общего понимания принципа функционирования такого устройства крепления, соединительный орган 14 предусмотрен для закрепления под передней частью ботинка и для обеспечения его качания между нижним положением, показанным на фиг.2 (при этом соединительный орган, как и присоединенный к нему ботинок, располагается по существу горизонтально) и верхним положением, показанным на фиг.1, в котором пятка ботинка пользователя приподнимается по отношению к данному спортивному изделию.
Соединительный орган 14 связан с упомянутым основанием при помощи тяги 16, причем эта тяга смонтирована с возможностью вращения вокруг двух поперечных осей А1 и А2, размещенных, с одной стороны, на выступе 13 основания 12, а с другой стороны, на соединительном органе 14.
В раскрытом здесь примере реализации тяга 16 шарнирно закреплена своим задним (по отношению к направлению протяженности данного спортивного изделия) концом и шарнирно закреплена своим передним концом на переднем конце соединительного органа 14 таким образом, чтобы в нижнем положении эта тяга и соединительный орган вкладывались один в другой.
Для достижения такого результата можно, например, предусмотреть, чтобы соединительный орган 14 был выполнен по существу из двух параллельных друг другу элементов, смещенных друг относительно друга в поперечном направлении и соединенных между собой поперечными перемычками, причем в этом случае тяга 16 входит в пространство между двумя этими параллельными элементами. Тяга 16 также может быть сконструирована в форме двух параллельных элементов, соединенных поперечными перемычками.
Можно также предусмотреть, чтобы эта тяга была образована двумя параллельными элементами, располагающимися по одну и по другую стороны от соединительного органа 14. Однако можно также использовать предлагаемое изобретение, располагая эту тягу перед соединительным органом, то есть шарнирно закрепляя ее своим передним концом на основании и своим задним концом на переднем конце соединительного органа.
В процессе движения поднятия пятки ботинка, когда соединительный орган 14 переходит из своего нижнего положения в свое верхнее положение, этот соединительный орган 14 упирается в основание крепления своим передним концом, который, по меньшей мере на некоторой своей части, представляет искривленный профиль 19. Форма и характер изменения этого искривленного профиля 19 обусловливают, в функции угловой ориентации данного соединительного органа, положение оси А2 по высоте относительно основания 12. Путем оптимального построения профиля кривой 19 и путем оправданного выбора длины и исходного угла наклона тяги 16 определяют относительное движение соединительного органа 14 по отношению к основанию 12 в ходе фазы подъема пятки ботинка. В проиллюстрированном здесь примере реализации можно видеть, что угловое перемещение тяги 16 является незначительным и имеет, например, величину в диапазоне от 10 до 20 градусов в том случае, когда соединительный орган 14 поворачивается на угол примерно в шестьдесят градусов, и что, принимая во внимание исходный угол наклона упомянутой тяги, этот поворот преобразуется в небольшое, но реальное перемещение в направлении вперед оси А2. Здесь следует отметить, что то движение, которое соответствует подъему пятки ботинка, осуществляется благодаря движению качения со скольжением упомянутого искривленного профиля 19 по основанию 12.
Соединительный орган 14, тяга 16 и не показанные на приведенных в приложении фигурах средства зацепления ботинка с упомянутым соединительным органом представляют собой основные элементы, образующие систему удержания, при помощи которой ботинок закрепляется на данном спортивном изделии и с помощью которой определяется относительное движение этого ботинка по отношению к данному спортивному изделию. Устройство крепления 10 также содержит систему упругого возврата ботинка в его нижнее положение, причем в данном случае упомянутая система удержания оказывается независимой от упомянутой системы упругого возврата.
В соответствии с предлагаемым изобретением упругая система возврата содержит по меньшей мере один упругий орган, который связан с данным спортивным изделием, и по меньшей мере один гибкий связующий элемент, который соединяет упомянутый упругий орган с ботинком и который взаимодействует с по меньшей мере одним возвратным органом. В первом примере реализации предлагаемого изобретения, схематически показанном на фиг.1-3, упомянутый гибкий связующий элемент соединен с ботинком косвенным образом в том смысле, что он не присоединен непосредственно к этому ботинку, но связан с соединительным органом. Однако, поскольку ботинок и этот соединительный орган находятся в постоянной связи друг с другом в процессе использования данной системы, это в функциональном смысле дает одинаковый результат.
В примере реализации предлагаемого изобретения, показанном на фиг.1-3, устройство крепления 10 содержит направляющее ребро 18, которое образовано профилированным элементом, имеющим форму параллелепипеда и проходящим продольно в направлении назад позади соединительного органа 14. Известным образом это направляющее ребро предусмотрено для того, чтобы взаимодействовать с канавкой, имеющей поперечное сечение, дополняющее это ребро, и выполненной в подошве ботинка, для того чтобы обеспечить направляющее воздействие в боковом направлении в системе, образованной ботинком и его креплением.
Предпочтительно упомянутый выше упругий орган 20 интегрирован во внутреннюю полость гнезда 22, выполненного внутри упомянутого ребра. В этом первом примере реализации упругий орган 20 представляет собой пружину сжатия, которая располагается горизонтально в продольном направлении в гнезде 22. Передний конец этой пружины сжатия 20 упирается в переднюю поверхность 24 гнезда 22. Таким образом, передний конец упомянутой пружины является фиксированным. Задний конец этой пружины упирается в подвижную каретку 26, которая имеет возможность скользить в продольном направлении по отношению к основанию 12 и к ребру 18. Говоря более конкретно, эта подвижная каретка 26 содержит передний конец 27, который имеет возможность перемещаться на уровне переднего отверстия 29 гнезда 22, и задний конец 31, который имеет возможность перемещаться в гнезде 22 и на который опирается задний конец пружины 20.
Такое конструктивное решение упругого органа и подвижной каретки является аналогичным тому конструктивному решению, которое можно обнаружить в устройстве, описанном в патенте ЕР-768103, и в некоторых устройствах креплений для беговых лыж, распространяемых Заявителем на рынке под названием "SNS Pilot". Однако в отличие от этого прототипа, в котором упругий орган связан с ботинком при помощи тяги, устройство в соответствии с предлагаемым изобретением содержит гибкий связующий элемент 30, который соединяет упомянутый упругий орган 20 с упомянутым соединительным органом 14.
Как это можно видеть на приведенных в приложении чертежах, связующий элемент 30 не закреплен непосредственно на упругом органе, но закреплен на переднем конце 27 подвижной каретки 26. Этот связующий элемент проходит через направляющий передаточный элемент 34, который в рассматриваемом здесь случае образован шкивом, смонтированным на выступе 13 коаксиально с тягой 16 на оси А1. Этот направляющий передаточный элемент также может быть образован простой поверхностью скольжения, предпочтительным образом искривленной. В этом примере реализации направляющий передаточный элемент 34 фиксирован по отношению к основанию 12 и по отношению к данному спортивному изделию. Другой конец гибкого связующего элемента 30 закреплен на соединительном органе 14 таким образом, чтобы та часть этого гибкого связующего элемента 30, которая проходит между направляющим передаточным элементом 34 и соединительным органом 14, располагалась по существу вертикально таким образом, чтобы возвратное усилие, воздействующее на соединительный орган 14, было в основном направлено вниз, включая и тот случай, когда этот соединительный орган находится в своем верхнем положении, как это проиллюстрировано на фиг.1. Напротив того, та часть этого гибкого связующего элемента 30, которая проходит от упомянутого направляющего передаточного элемента к упругому органу 20, располагается по существу в горизонтальном направлении.
Как это можно видеть на фиг.1 и 2, в том случае, когда упомянутый соединительный орган переходит из своего нижнего положения в свое верхнее положение, гибкий связующий элемент 30 вытягивает подвижную каретку в направлении вперед и вызывает сжатие пружины, которая таким образом обеспечивает создание возвратного усилия.
Предпочтительно этот гибкий связующий элемент является по существу нерастяжимым. В данном случае речь может идти, например, об элементе в виде металлического тросика или тросика, изготовленного из полимерных волокон с весьма малой степенью растяжимости, например из арамидных волокон. Можно также предположить, что этот гибкий связующий элемент будет изготовлен в виде ленты. Эта лента, работающая на растяжение, может представлять собой, например, металлическую ленту или же пучок параллельных между собой полимерных волокон, залитых в некоторый полимерный материал. Предпочтительным образом этот связующий элемент является достаточно гибким для того, чтобы не создавать существенного упругого эффекта, и особенно для того, чтобы выдерживать изменение направления его перемещения на угол, составляющий примерно 90 градусов. Таким образом, из сказанного выше следует, что гибкость связующего элемента 30 должна быть оценена главным образом с точки зрения его способности к изгибу вокруг оси направляющего элемента. При этом упомянутая гибкость связующего элемента не может быть только локальной, поскольку этот связующий элемент перемещается по отношению к оси этого направляющего элемента. Зато в том случае, когда этот гибкий связующий элемент, в частности, представляет собой ленту, эта лента не будет гибкой по отношению к изгибу относительно оси, перпендикулярной плоскости ленты, однако это не будет препятствовать тому, чтобы рассматривать эту ленту как гибкую в смысле предлагаемого изобретения, если она не обладает значительным сопротивлением при изгибе вокруг оси направляющего элемента.
Разумеется, эта гибкость требует, чтобы направляющее воздействие на ботинок было обеспечено при помощи другого механизма, в данном случае при помощи системы удержания. В рассматриваемом здесь примере реализации этот направляющий механизм образован, например, тягой 16 и поверхностью скольжения 19. Однако этот направляющий механизм может быть спроектирован и другим образом, например, в виде механизма с несколькими тягами, как это описано в патентом документе WO 96/37269.
На фиг.3 показан вариант первой реализации предлагаемого изобретения, в котором возвратная система в соответствии с этим изобретением содержит механизм регулирования жесткости упругого органа 20, используемый для того, чтобы предоставить пользователю возможность увеличивать или уменьшать интенсивность упругого возвратного усилия так, чтобы адаптировать его к его собственному стилю движения.
Таким образом, можно видеть, что передний конец пружины в данном случае опирается на специальный упор 36, который смонтирован в упомянутом гнезде на резьбовой части 38 стержня 40. Этот стержень 40 установлен в гнезде 22 таким образом, чтобы быть подвижным по вращательному движению вокруг своей продольной оси А3, но чтобы быть заблокированным по поступательному движению в продольном направлении. В то же время видно, что этот стержень 40 проходит по всей длине гнезда 22 таким образом, чтобы обеспечивать направляющее воздействие для пружины 20 (спиральные витки которой намотаны вокруг этого стержня) и для заднего конца подвижной каретки 26, в который упирается эта пружина 20. В отличие от пружины 20 и каретки 26, которые имеют возможность свободно скользить на этом стержне 38, упомянутый упор 36 образован гайкой, которая навинчивается на резьбовую часть 38 стержня 40 и которая не имеет возможности поворачиваться вокруг своей продольной оси А3. Передний конец стержня 40 выступает за пределы переднего конца гнезда 22 и имеет форму головки винта 44 таким образом, чтобы обеспечить для пользователя возможность поворачивать стержень 40 вокруг его оси А3. Таким образом, при помощи этой системы типа винт-гайка пользователь имеет возможность вызывать продольное перемещение упора 36 в гнезде для того, чтобы обеспечить более или менее значительное предварительное натяжение пружины 20. В рассматриваемом здесь примере реализации направляющее ребро 18 содержит окно 42, которое позволяет пользователю визуально наблюдать фактическое положение упора 36, что дает ему возможность оценить предварительное натяжение возвратной пружины. При этом с упомянутым окном 42 могут быть связаны графические реперные обозначения.
Эта система упругого возврата представляет особенный интерес, поскольку она позволяет разместить упругий орган в той зоне данного устройства крепления, где этот орган не препятствует кинематике движения развертывания стопы, обеспечиваемой данным устройством крепления. В данном случае упомянутый упругий орган выполнен в задней части устройства крепления, однако может быть предусмотрено также размещение этого упругого органа в передней части этого устройства крепления.
Таким образом, упомянутый упругий орган в целом является неподвижным по отношению к данному спортивному изделию и этот упругий орган связан с соединительным органом только косвенным образом при помощи гибкого связующего элемента. Кроме того, поскольку этот гибкий связующий элемент проходит по направляющему передаточному элементу, обеспечивается наилучшая ориентация направления создаваемого возвратного усилия, которое действует в направлении той части гибкого связующего элемента, которая проходит между этим направляющим передаточным элементом и ботинком. Эта ориентация является по существу параллельной по отношению к траектории, которую должен отслеживать ботинок в своем движении в направлении своего нижнего положения.
В рассматриваемом здесь примере реализации упомянутая выше пружина представляет собой пружину сжатия, что предполагает наличие подвижной каретки. Предлагаемое изобретение также может быть реализовано с использованием упругих органов других типов, например, с использованием пружины растяжения, которая будет описана при рассмотрении второго способа реализации предлагаемого изобретения.
В этом первом способе реализации можно считать, что система удержания ботинка остается независимой от системы его упругого возврата, даже если в данном случае гибкий связующий элемент (принадлежащий к системе упругого возврата) закреплен на соединительном органе, который в основном принадлежит к системе удержания. Эта независимость подтверждается тем обстоятельством, что даже в отсутствии системы упругого возврата (например, в случае разрыва гибкого связующего элемента или разрушения упругого органа) система удержания продолжает в полном объеме выполнять свою главную функцию удержания ботинка.
На фиг.4-7 схематически представлена система, образованная ботинком 46 и устройством крепления 10 в соответствии со вторым способом реализации предлагаемого изобретения.
В рассматриваемом здесь случае ботинок имеет внешний вид обычного лыжного ботинка 46, используемого для беговых лыж и имеющего гибкую подошву, снабженную на ее нижней поверхности сплошной продольной канавкой, предназначенной для взаимодействия со сплошным направляющим ребром 18 устройства крепления 10. В то же время этот ботинок 46 представляет на своем переднем конце переднюю поперечную планку зацепления 48, проходящую сквозь упомянутую канавку, и проходящую позади от этой передней планки 48 вторую поперечную планку 50, также проходящую сквозь упомянутую канавку и располагающуюся по существу на уровне зоны плюсневого сустава стопы пользователя и не дальше задней границы первой трети длины ботинка, которая образует предельную заднюю границу зоны этого плюсневого сустава.
Очевидно, что возможно любое расположение задней упомянутой второй поперечной планки 50 в пространстве между передней поперечной планкой 48 и определенной выше задней границей.
Передняя планка 48 предпочтительно изготовлена в виде стержня, имеющего форму цилиндра вращения и предназначенного для взаимодействия известным образом с системой удержания, содержащей подвижную зажимную губку 52 в форме крюка, управляемую при помощи рычага 54, и переднюю кромку 56 основания, образующую неподвижную зажимную губку, для блокировки поворота ботинка на данном спортивном изделии. Конструкция такого устройства крепления описана, например, в известном патенте FR 2634132 на имя Заявителя и может быть выполнена либо с ручным закрытием крепления, либо с автоматическим блокирующим закрытием этого крепления. Таким образом, эта конструкция не будет здесь описана более подробно.
Задняя планка 50 предназначена для обеспечения возможности непосредственного зацепления за подошву ботинка системы упругого возврата в соответствии с предлагаемым изобретением.
Действительно, в этом втором варианте реализации предусмотрена система упругого возврата, в которой упругий орган 20, в данном случае представляющий собой пружину растяжения, интегрирован в гнездо 22, выполненное внутри направляющего ребра 18 данного устройства крепления, и соединен своим задним концом с основанием 12 этого устройства крепления. В соответствии с предлагаемым изобретением передний конец упомянутого упругого органа соединен с гибким связующим элементом 30, который в данном случае проходит в направлении вперед. Этот гибкий связующий элемент снабжен на своем переднем конце крюком 58, изготовленным, например, из металла. Как это можно видеть на фиг.6 и 7, крюк 58 предназначен для зацепления за заднюю планку 50 ботинка для того, чтобы обеспечить связь упругого органа 20 с ботинком 46 и дать, таким образом, этой системе возможность выполнить свою функцию упругого возврата. Крюк 58 образует тем самым соединительный орган между гибким связующим элементом и ботинком, однако этот соединительный орган связан с остальной частью данного устройства крепления только при помощи гибкого связующего элемента 30.
Разумеется, как и в первом варианте реализации, в данном случае гибкий связующий элемент 30 проходит под направляющим передаточным элементом 34 (реализованным, например, в форме шкива или искривленной поверхности), который в этом способе реализации выполнен на уровне переднего отверстия 29 гнезда 22.
Одна из трудностей, которые требуется преодолеть для использования этого принципа, состоит в обеспечении возможности достаточно простого и надежного зацепления крюка 58 за заднюю планку 50 ботинка. Действительно, в отличие от примера реализации из предшествующего уровня техники, описанного в патенте ЕР-768103, крюк 58 в данном случае выполнен на конце гибкого связующего элемента 30, который, таким образом, не может сам по себе обеспечить точное и предварительно определенное позиционирование крюка 58 в отсутствие ботинка 46.
В соответствии с другим аспектом предлагаемого изобретения крюк 58 содержит направляющий участок 60, который предназначен для взаимодействия с дополняющими его поверхностями основания 12 данного крепления для того, чтобы в том случае, когда упругий орган 20 посредством гибкого связующего элемента 30 переводит крюк 58 в его положение покоя, в отсутствие ботинка этот крюк оказался направленным соответствующим образом и удерживался в этом предварительно определенном положении благодаря взаимодействию его направляющего участка и этих соответствующих форм основания. В то же время можно видеть, что данное устройство крепления содержит также заслонку 62, которая управляется рычагом 54 открытия крепления и также взаимодействует с упомянутым направляющим участком крюка для перевода этого крюка из его положения покоя в положение ожидания, позволяющее установить ботинок в данное устройство крепления.
Действительно, на фиг.5-7 можно видеть, что данное устройство крепления содержит заслонку 62, которая смонтирована с возможностью скольжения в продольном направлении на основании 12 этого крепления, и передняя часть этой заслонки 61 связана с подвижной зажимной губкой 52 для того, чтобы отслеживать ее движение в продольном направлении, которое управляется при помощи рычага 54. Таким образом, в том случае, когда этот рычаг 54 поднимается для перевода устройства крепления в открытое положение, видно, что заслонка 62 продвигается вперед в продольном направлении одновременно с подвижной зажимной губкой 52. При этом заслонка 62 содержит заднюю часть 64, которая имеет U-образную форму в поперечном сечении и которая, в сдвинутом назад положении этой заслонки 62, проходит внутри отверстия 29, открывающегося из гнезда 22. Таким образом, вместе с примыкающими стенками 70 этого отверстия 29 упомянутая задняя часть 64 заслонки, имеющая U-образную форму, определяет дополняющие формы для направляющего участка 60 крюка 58, как это схематически проиллюстрировано на фиг.8-10. Эти дополняющие формы могут содержать сопряженные наклонные поверхности 66, 68, упорные поверхности 66 или еще, что не является ограничительным, боковые направляющие поверхности 70.
Под действием упругого органа 20 гибкий связующий элемент 30 входит внутрь гнезда 22 через отверстие 29 и, в отсутствие ботинка, этот гибкий связующий элемент увлекает за собой направляющий участок 60 крюка 58. При этом упомянутая направляющая часть крюка автоматически блокируется против дополняющих ее форм основания данного крепления и упомянутой заслонки, обеспечивая таким образом блокировку крюка 58 в некотором заданном положении покоя.
Из этого заданного положения покоя крюк 58 может быть перемещен в продольном направлении вперед при помощи задней части 64 заслонки 62 в том случае, когда эта заслонка переводится в направлении вперед в результате того, что пользователь поднимает упомянутый рычаг управления. В этом положении ожидания, схематически показанном на фиг.5, крюк 58 больше не имеет возможности взаимодействовать с задней планкой 50 ботинка, который в этом случае может быть свободно установлен в данное устройство крепления (или наоборот, удален из него). Установка ботинка в устройство крепления осуществляется путем вставления передней планки 48 подошвы этого ботинка между двумя зажимными губками 52, 54 шарнира с последующим поворотом подошвы ботинка 46 в направлении вниз вокруг оси вращения, образованной упомянутым шарниром. После того как ботинок оказывается в своем нижнем положении, опираясь на устройство крепления одновременно своей передней частью и своей задней частью, его задняя планка 50 достигает положения, в котором обеспечивается возможность зацепления крюка 58 за эту планку. После этого пользователь может закрыть устройство крепления, опуская рычаг 54, следствием чего является блокировка зажимных губок шарнира вокруг передней планки 48. В то же самое время заслонка 62 возвращается назад и, под возвратным действием пружины 20, крюк 48 совершает возвратное движение вплоть до зацепления за заднюю планку 50 (которая по необходимости не является цилиндром вращения), располагающейся на траектории движения этого крюка между его положением ожидания и положением возврата. При этом система крепления оказывается в положении, схематически проиллюстрированном на фиг.6.
Если пользователь поднимает пятку ботинка, то этот ботинок при этом совершает вращательное движение вокруг оси упомянутого шарнира, материализованной в виде передней планки 48. В то же самое время задняя планка 50 поднимается по траектории, по существу представляющей собой дугу окружности, и, как это показано на фиг.7, увлекает за собой крюк 58, что вызывает удлинение пружины растяжения 20 в соответствии с тем же принципом, который был описан выше по отношению к первому способу реализации предлагаемого изобретения.
Операция освобождения ботинка от данного устройства крепления осуществляется в обратном порядке по отношению к установке ботинка в это устройство крепления. При этом в том случае, когда ботинок 46 находится в его нижнем положении, пользователь открывает крепление, поднимая рычаг 54, что вызывает, с одной стороны, раскрытие зажимных губок 52, 56, а с другой стороны, обеспечивает продвижение вперед заслонки 62. Эта заслонка при помощи своей задней части 64 захватывает направляющий участок 60 крюка 58 и уводит за собой этот крюк 58 в направлении вперед, что обеспечивает освобождение задней планки 50 подошвы ботинка.
Оба описанных выше способа реализации предлагаемого изобретения позволяют получить такую систему упругого возврата, в которой возвратное усилие находится под полным контролем, причем удержание ботинка и направляющее воздействие, обеспечиваемое в процессе его движения, реализуются при помощи независимой системы. Можно также предусмотреть такой вариант реализации, чтобы начало фазы поднятия ботинка осуществлялось с относительно небольшим исходным возвратным усилием и чтобы затем изменение этого возвратного усилия происходило в соответствии с "запрограммированной" кривой в функции угла поднятия ботинка. Для этого упомянутый упругий орган может быть образован несколькими пружинами, действующими последовательно и/или параллельно, и/или этот упругий орган также может содержать элементы, изготовленные из эластомерных материалов и представляющие другой тип зависимости развиваемого ими усилия от степени их деформации.
В то же время в любом варианте реализации предлагаемого изобретения система упругого возврата может быть дополнена другими упругими системами или системами упоров.
Можно также предусмотреть, как это схематически показано на фиг.11, наличие упора 72, размещенного в конце рабочего хода ботинка, который начинает действовать только с некоторого предварительно определенного угла подъема этого ботинка. Этот упор 72 может представлять собой жесткий упор, который ограничивает свободный ход ботинка, или упругий упор, выполненный в виде упругого буфера типа того, который описан в патентном документе FR-А-2.650.192 и который одновременно обеспечивает эффект гибкого упора и дополнительный эффект упругого возврата. Упомянутый упор 72, выполненный жестким или упругим, может взаимодействовать непосредственно с ботинком или может взаимодействовать с некоторой частью системы удержания, например, с соединительным органом 14 этой системы удержания.
В примере реализации предлагаемого изобретения, показанном на приведенных в приложении чертежах, направляющее ребро 18 интегрировано в основание 12 данного устройства крепления. Однако можно предусмотреть, чтобы это направляющее ребро было интегрировано непосредственно в конструкцию самого спортивного изделия, например в конструкцию лыжи. В этом случае гнездо 22 и пружина 20 (а также подвижная каретка 26, в случае необходимости) будут интегрированы непосредственно в конструкцию данного спортивного изделия. Предпочтительным образом такая конструкция системы упругого возврата может иметь ширину в диапазоне от 15 до 20 мм и может быть полностью интегрирована под подошву ботинка для того, чтобы разместиться, например, в габаритных размерах канавки, которая располагается под поверхностями скольжения беговых лыж.
В то же время можно видеть, что во всех проиллюстрированных выше способах реализации предлагаемого изобретения направляющий передаточный элемент 34 размещен на относительно небольшом расстоянии от конца гибкого связующего элемента, который связан с ботинком (в случае необходимости, посредством соединительного органа), причем это обстоятельство рассматривается при расположении ботинка в его нижнем положении. Горизонтальная проекция этого расстояния предпочтительным образом имеет величину менее 3 сантиметров и еще более предпочтительным образом составляет менее 2 сантиметров. Такая близость гарантирует, что фактическое направление траектории возврата (которое представляет собой направление той части гибкого связующего элемента, которая проходит между ботинком и направляющим передаточным элементом) остается возможно более близким к направлению, параллельному направлению относительного движения ботинка по отношению к данному спортивному изделию (или, что вполне эквивалентно, наиболее близким к направлению касательной к траектории движения ботинка). В то же время при этом, как тот конец гибкого связующего элемента, который соединен с ботинком, так и упомянутый направляющий передаточный элемент, предпочтительным образом будут размещены в непосредственной близости от зоны расположения плюсневого сустава стопы пользователя в том случае, когда ботинок находится в своем нижнем положении.
Кроме того, и в частности в тех случаях, когда система, обеспечивающая удержание и направляющее воздействие для ботинка, определяет относительное движение этого ботинка по отношению к данному спортивному изделию, которое представляет собой вращательное движение или движение, близкое к вращательному (например, как в представленном здесь втором способе реализации предлагаемого изобретения), необходимо предусмотреть, чтобы упомянутый направляющий передаточный элемент был размещен на некотором расстоянии от центра этого вращательного движения, без чего упомянутое движение ботинка будет вызывать слишком малое перемещение конца гибкого связующего элемента или совсем не вызывать перемещения конца этого элемента, который соединен с упругим органом, что делает систему упругого возврата неэффективной.
Реферат
Изобретение относится к устройству крепления ботинка к спортивному изделию, например лыже. Устройство содержит систему удержания, при помощи которой упомянутый ботинок закрепляется с возможностью его перемещения по отношению к ней в диапазоне между его нижним положением и его верхним положением, и включает систему упругого возврата этого ботинка в его нижнее положение. Система удержания выполнена независимой от системы упругого возврата и содержит, по меньшей мере, один упругий орган, который связан со спортивным изделием; один упругий связующий элемент, который, непосредственно или косвенно, соединяет упомянутый упругий орган с ботинком и который взаимодействует с, по меньшей мере, одним направляющим передаточным органом. Устройство обеспечивает плавность увеличения усилия угла подъема соединительного органа и не противодействует слишком сильно развертыванию стопы. Кроме того, оно обеспечивает снижение габаритов и веса. 24 з.п. ф-лы, 11 ил.

Комментарии