Индукторный привод вспомогательных машин тягового подвижного состава - RU181759U1
Код документа: RU181759U1
Чертежи

Описание
Область техники
Предлагаемая полезная модель относится к вспомогательному приводу, в частности, к электроприводу вспомогательных машин тягового подвижного состава (вентиляторы обдува тяговых электродвигателей и силового оборудования; компрессоров) путей общего пользования и предприятий открытых горных разработок.
Уровень техники
Из уровня техники известны конструкции вспомогательных приводов (см., например, RU 66129, 27.08.2007).
Известная конструкция электроприводов обладает рядом существенных недостатков, а именно, отсутствует возможность поддержания устойчивой безаварийной работы привода с частыми пусками и остановками двигателя при нестабильном напряжении в контактных сетях.
Раскрытие полезной модели
Технический результат, на достижение которого направлено предлагаемое техническое решение, заключается в обеспечении устойчивой безаварийной работы вспомогательных машин локомотивов (вентиляторов обдува и компрессоров), при нестабильном питающем напряжении.
Эта задача решается путем создания индукторного привода вспомогательных машин (вентилятора обдува тяговых электродвигателей и силового оборудования; компрессоров) локомотивов, содержащего индукторный электродвигатель, включающий статор с фазными катушками, зубчатый ротор с валом, один (или оба) конца которого выполнены с возможностью подключения к ним механической нагрузки, корпусную часть, а также электропроводку электродвигателя для формирования импульса тока в фазных катушках. Корпусная часть содержит область для вывода электрических контактов от катушек электродвигателя, электрические контакты выполнены с возможностью подключения к ним блока управления электродвигателем, при этом на валу зубчатого ротора установлен вентилятор обдува индукторного двигателя и диск положения ротора, а на корпусной части индукторного электродвигателя закреплены датчики положения диска ротора, выполненные с возможностью формирования электрического сигнала об угловом положении зубцов ротора относительно катушек статора для последующей передачи указанного сигнала в блок управления. Статор и ротор набраны из листовой электротехнической стали, при этом фазные катушки статора изолированы между собой и установлены на явно выраженных зубцах, кроме того, фазные катушки статора образуют три независимые фазы, а ротор выполнен безобмоточным.
Таким образом, заявляемое техническое решение всей своей совокупностью существенных признаков позволяет обеспечить устойчивую, безаварийную работу привода вспомогательных машин (вентилятора обдува, компрессора) при нестабильном напряжении питающей сети.
Краткое описание чертежей
На фиг. 1 представлена схема соединения обмоток электродвигателя.
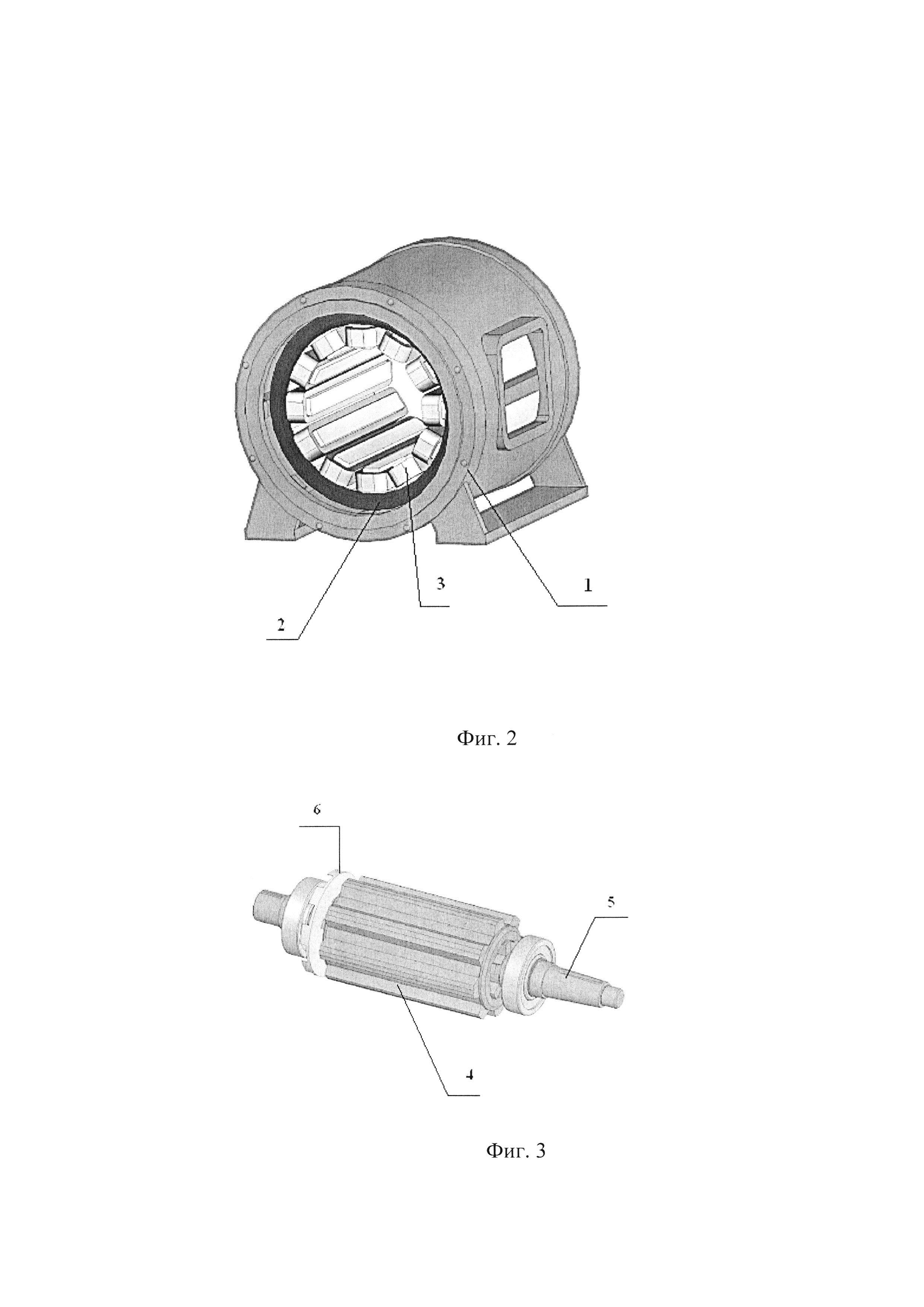
На фиг. 2 представлен общий вид статора индукторного электродвигателя.
На фиг. 3 представлен общий вид ротора индукторного электродвигателя.
Осуществление полезной модели
Электропривод выполнен в виде индукторного двигателя, который (как показано на фиг. 2 и 3) содержит статор 2, зубчатый ротор 4 и корпусную часть 1. Причем корпусная часть содержит область для вывода электрических контактов индукторного двигателя, к которым подключен блок управления (на чертеже не показан). На валу 5 индукторного двигателя установлен диск 6 положения ротора, а на корпусной части 1 индукторного электродвигателя закреплена плата датчика положения ротора (ДПР). Датчики положения ротора передают сигналы о положении зубцов ротора относительно зубцов статора в программируемый контроллер по экранированному кабелю.
Статор 2 набран из шихтованных листов электротехнической стали и размещен в корпусе двигателя. Катушки 3 статора установлены на явно выраженных зубцах. Такое расположение катушек исключает возможность между фазового замыкания и повышает вероятность безаварийной работы вспомогательных машин локомотивов (вентиляторов обдува и компрессоров), при нестабильном питающем напряжении. Кроме того, при ремонте электродвигателя это позволяет демонтировать отдельно взятую катушку для ремонта или замены.
Ротор набран из шихтованных листов электротехнической стали. На роторе отсутствует обмотка, а, следовательно, повышается вероятность безаварийной работы вспомогательных машин локомотивов (также снижаются потери на нагрев). Конструкция ротора без обмоток также позволяет повысить КПД двигателя.
Данное техническое решение обеспечение бесперебойной, безаварийной и без снижения производительности работы вспомогательных машин локомотивов при нестабильном питающем напряжении (резкие всплески и большие провалы напряжения) достигается путем применения индукторного привода, конструкция которого позволяет осуществлять управление режимами работы.
Диск положения ротора и плата ДПР с датчиками положения ротора формируют сигналы положения ротора и передают их в блок управления. На основании полученных сигналов обеспечивается возможность регулирования работы электропривода в заданных параметрах при нестабильном напряжении сети.
Индукторный электродвигатель также содержит подшипниковые щиты. Активное железо статора и ротора, набраны из шихтованных изолированных листов электротехнической стали толщиной 0,5 мм. В пазы активного железа статора уложены катушки, которые образуют три независимые фазы, начала и концы фаз выведены в клеммную коробку.
Работа электропривода осуществляется следующим образом:
На валу индукторного двигателя установлен диск положения ротора. На щите двигателя расположены датчики положения ротора. Полученные данные о положении зубцов ротора относительно зубцов статора поступают в электронный блок управления. После вычисления наиболее выгодного расположения зубцов ротора и статора, блок управления формирует импульс тока в нужную фазу. Изменением частоты и величины импульса формируется вращающий момент на валу двигателя и частота его вращения. Вращающий момент двигателя формируется как реактивная составляющая магнитного момента. Коммутация силовых элементов блока управления осуществляется программно, входящим в состав блока управления программируемым контроллером. Программный способ управления индукторным двигателем позволяет без его переделки формировать необходимую электромеханическую характеристику под конкретную задачу.
Выбором чисел полюсов статора и ротора может быть обеспечен высокий вращающий момент при более высоких значениях КПД.
Электронный блок управления позволяет эффективно регулировать любые параметры двигателя (вращающий момент, частоту вращения, пусковые режимы), а также внешние параметры систем в которых двигатель является элементом системы. Данный принцип управления заложен в основу управления приводом вентилятора обдува и компрессора.
Электродвигатель конструктивно имеет три звена катушек постоянного тока (фиг. 1), в каждом звене последовательно соединены 6 катушек. Двигатель имеет шесть выводов в клеммник для подключения шести кабелей от блока управления U1-U2, V1-V2 и W1-W2.
Сигнал от датчика положения ротора к блоку управления индукторного привода проходит по экранированным проводам.
Подача силовых импульсов на катушки статора двигателя осуществляется в соответствии с сигналами от датчика положения ротора и в функции вторичного тока штатного трансформатора тока 2000/5 А.
Конструкция индукторного двигателя более проста, чем традиционных асинхронных двигателей переменного тока - фазные катушки статора изолированы между собой (имеют видимый просвет), что исключает проблему межфазных замыканий, характерную для асинхронных двигателей.
Как показано на фиг. 3, ротор не имеет обмоток и беличьего колеса, это создает облегченные температурные условия работы подшипников, обусловленные малыми потерями электроэнергии на нагрев ротора, и увеличивает КПД привода.
Данная конструкция позволяет обеспечить работоспособность электропривода при нестабильной питающей сети.
В качестве блока управления используется блок, в состав которого входит программируемый контроллер, который осуществляет в автоматическом режиме контроль поддержания производительности привода (например, вентилятор обдува оборудования и компрессора). Контроллер управляет силовыми полупроводниковыми элементами.
Привод вентилятора, оснащенный индукторным электродвигателем и блоком управления, характеризуется длительной и безотказной работой в динамических режимах с частыми пусками и остановками, а также колебаниями напряжения в контактных сетях. При этом пуск механизма осуществляется плавно при отсутствии повышенных «пусковых» токов. В целом индукторный двигатель с электронным блоком управления представляет собой высокоэффективный электропривод.
При введении обратной связи (по контролю температуры охлаждаемого оборудования) индукторный привод за счет автоматизации процесса (исключается человеческий фактор в регулирование параметров работы вспомогательного оборудования), регулировки оборотов индукторного двигателя привода вентилятора, значительно снижает потребление электроэнергии, не влияя на уменьшение срока службы тяговых двигателей, сглаживающих реакторов и выпрямительных установок. Так же повышает возможность контроля производительности работы вспомогательных приводов при нестабильном напряжении питающей сети.
При возникновении электрической неисправности в одной из обмоток, блок управления индукторного привода позволяет программно исключить из работы один из неисправных каналов и закончить производственный процесс, с некоторой потерей мощности, до вывода привода в ремонт.
В конструкцию двигателя заложены необслуживаемые подшипники, позволяющие двигателю безаварийно отработать межремонтный цикл.
При использовании индукторного привода в качестве привода компрессоров, он позволяет регулировать производительность компрессоров в зависимости от расхода сжатого воздуха (средняя - при минимальном расходе воздуха (пополнение утечек, работа пневматических аппаратов локомотива, автотормозов поезда и т.д.) и максимальная производительность - когда требуется быстрое пополнение главных резервуаров сжатым воздухом (разгрузка думпкаров, откачивание питающей магистрали хоппер-дозаторного поезда и др.).
В блоке управления двигателем предусмотрена обратная связь от трансформатора тока. На БУ подается однофазное напряжение 400 В (+/-25%).
Режим 1. Система управления (в течение не более 20 сек) плавно запускает двигатель с выводом его на номинальные обороты. Если, по истечении 1-ой минуты, вторичный ток штатного токового трансформатора отсутствует, обороты двигателя снижаются до 1000 об/мин. и двигатель продолжает работать в течении 3 минут. Если в течение этого времени (3-х мин.) вторичный ток появился - переход на режим, если нет остановка двигателя. Данный режим работает только при первой подаче напряжения на БУ.
Режим 2. При появлении вторичного тока режим 1 - отключается. При значении вторичного тока более 0,8 А, система (в течение не более 20 сек) плавно запускает двигатель, выводя его на номинальные обороты. Далее (не более 40 с) происходит продувка оборудования, общее время работы не менее 60 с
Режим 3. По истечении времени (см. режим 2), обороты двигателя изменяются согласно изменению вторичного тока.
Режим 4. При длительном (более 3 минут) вторичном токе от 2 А и выше, а затем последующем снижении менее 1 А, двигатель выводится на номинальные обороты для продувки оборудования. Режим продувки длится 5 минут не зависимо от изменяющегося вторичного тока. После продувки оборудования при отсутствии вторичного тока, остановка двигателя, при наличии вторичного тока работа согласно таблице.
Режим 5. При снижении вторичного тока менее 0,8 А, двигатель выводится на номинальные обороты. В этом режиме продолжительность работы 120 с, далее полная остановка двигателя.
Режим 6. В случае увеличения вторичного тока до 5 А, двигатель выводится на максимальные обороты.
Реферат
Техническое решение относится к области управляемого электропривода. Электропривод выполнен в виде индукторного двигателя, который содержит статор, ротор и корпусную часть. Корпусная часть содержит область для вывода электрических контактов индукторного двигателя, к которым подключен блок управления, при этом на валу индукторного двигателя установлен диск положения ротора, а на корпусной части индукторного электродвигателя закреплена плата датчика положения ротора (ДПР) с датчиками положения ротора для передачи сигналов о положении зубцов ротора относительно зубцов статора в блок управления. Статор и ротор электродвигателя набраны из листовой электротехнической стали, а количество полюсов соответствует числу катушек в статоре. На полюсах статора установлены катушки, объединенные в несколько фаз. Фазные катушки статора изолированы между собой, при этом ротор выполнен безобмоточным. Технический результат, на достижение которого направлено предлагаемое техническое решение, заключается в обеспечении устойчивой безаварийной работы вентилятора обдува и компрессора при нестабильном питающем напряжении. 3 ил.
Комментарии