Блок привода,например,для автомобиля - SU1331436A3
Код документа: SU1331436A3
Чертежи


Описание
7.Блок привода по пп. 1-6, о т личающнйся тем, что стартер-генератор выполнен в виде гете- рополярной электрической машины по принципу Шмидта-Лоренца, переключаемой с двигательного режима на генераторный .
8.Блок привода по п. 7, отличающийся тем, что стато стартер-генератора имеет обмотки возбуткдения и несколько групп рабочих обмоток, последние расположены по окружности, отделены друг от друга и размещены между обмотками возбуждения .
9.Блок привода по п. 8, отличающийся тем, что ротор снабжен зубцами, а в пакете статора выполнены пазы, разделенные перемычками , шаг которых равен шагу зубцов ротора, и в пазах установлены рабочие обмотки, причем перемычки каждой группы рабочих обмоток смещены на заданную часть щага по отношению к зубцам ротора та к, что при равенстве перекрытия перемычками одной группы зубцов ротора, перемычки по меньшей мере одной другой группы рабочих обмоток находятся позади зубцов ротора по направлению вращения .
10.Блок привода по пп. 7-9, о т- личающийся тем, что обмотки возбуждения и рабочие обмотки
1
Изобретение относится к пусковым устройствам автомобильных двигателей внутреннего сгорания, в частности к блокам привода с двигателем внутреннего сгорания и стартер-генератором для автомобилей.
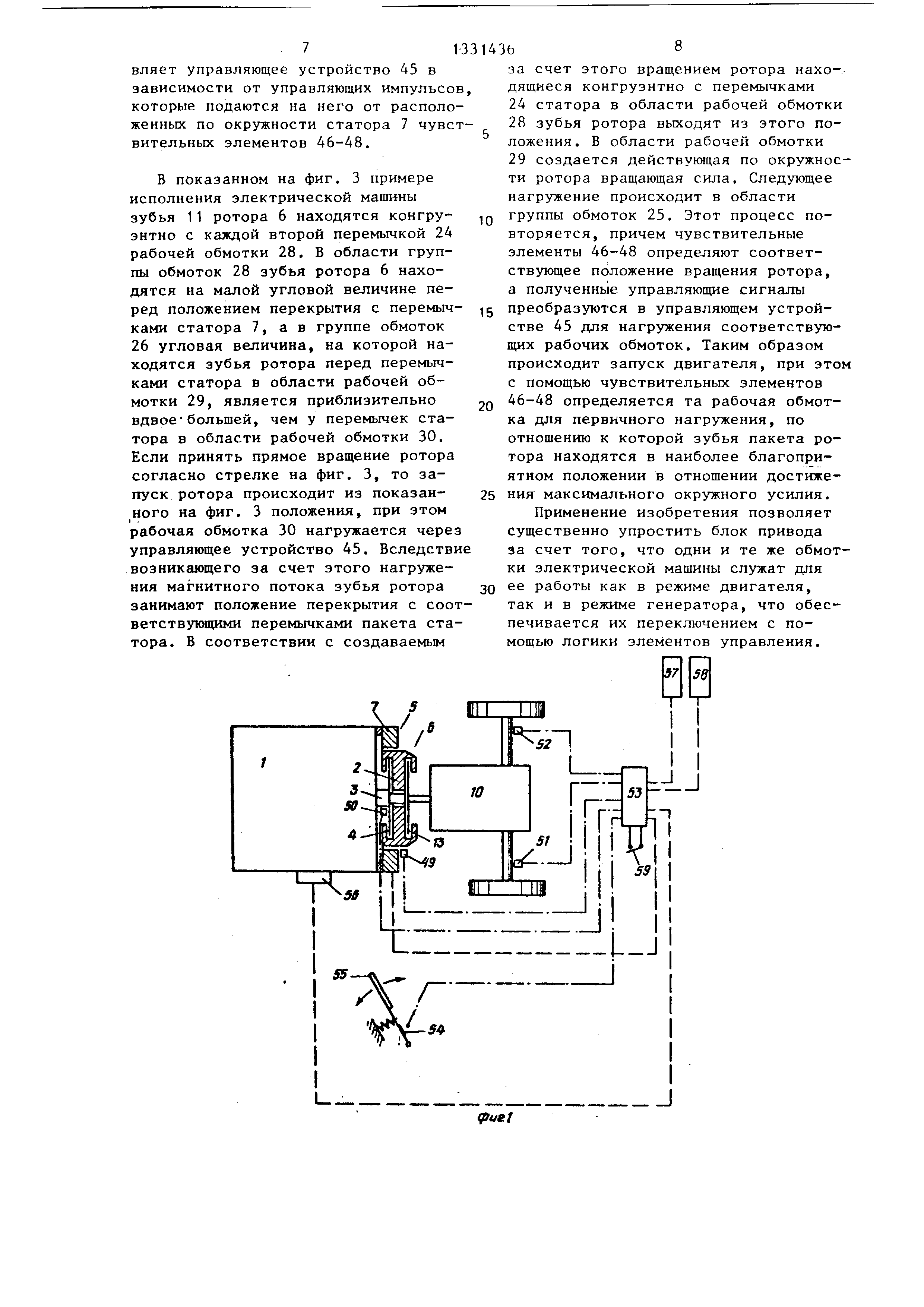
На фиг. 1 схематично изображен блок привода в соединении с ведущими колесами автомобиля; на фиг. 2 - часть блока привода, установленная между двигателем внутреннего сгорания и коробкой передачi на фиг. 3- стартер-генератор, выполненный в
33
1436
расположены (ю окружности асимметрично статору.
11.Блок привода по пп. 7-10, отличающийся тем, что он содержит расположенные по окружности статора на расстоянии друг от друга чувствительные элемочты и блок управления для осуществления нагружения и настройки соответствующих рабочих обмоток статора путем воздействия нмпульсами от чувствительных элементов на блок управления с учетом положения ротора.
12.Блок привода по п. 11, о т- личающийс я тем, что стартер-генератор выполнен в виде мйого- фазной электрической машины, а количество чувствительных элементов выбрано равным числу фаз машины.
13.Блок привода по пп. 11 и 12, отличающийся тем, что чувствительные элементы выполнены в виде индуктивных датчиков.
14.Блок привода по пп. 11-12, отличающийся тем, что чувствительные элементы выполнены в виде зондов Холла.
15.Блок привода по пп. 11 и 12, отличающийся тем, что чувст1)Ительные элементы выполнены в виде датчиков Вигонда.
16.Блок привода по пп. 7-15, отличающийся тем, что
он содержит преобразователь тока, переключаемый с выпрямителя на инвертор .
виде гетерополярной машины типа Шмидта-Лоренца; на фиг. 4 - блок привода в соединении с ведущими колесами автомобиля, влриаит исполнения.
Блок привода (фиг. 1) содержит двигатель 1 Блутреннего сгорания с маховиком 2, имеющим соединение с ведущим валом 3 двигателя 1 с. помощью первого сцепления 4, и стартер-генератор Ь, ротор 6 которого закреплен на маховике 2. Статор 7 стартер-генератсфа 5 т;ыполнен в виде пакета 8 пластик с обмотками
и соединен с корпусом 9 двигателя 1. Блок привода также содержит коробку
10передач, установленную со стороны выхода ведущего вала 3. Ротор 6 (фиг, 3) стартер-генератора 5 выполнен безобмоточным и снабжен зубцами
11и впадинами 12, а статор 7 своим пакетом 8 прифланцован к корпусу 9 (фиг. 2) двигателя 1 и размещен кон- центрично с маховиком 2 с образованием постоянного в пределах малых допусков воздушного зазора относительно ротора 6, Соединение и разъединение коробки 10 передач с двигателем осуществляется с помощью второго сцепления 13. Маховик 2 с первым сцеплением А и стартер-генератор 5 расположены на стороне двигателя 1
со стороны коробки 10 передач. Пакет 8 статора 7 расположен между установочной поверхностью 14 корпуса 9 двигателя 1 и стаканом 15 корпуса 9, при этом стакан 15 частично охватывает маховик 2. Пакет 8 статора 7 отцентрован относительно ротора 6 посредством распорных втулок 16 (вместо распорных втулок могут быть использованы штифты). Часть маховика 2 со стороны корпуса 9 двигателя 1 образует неподвижную в осевом направлении нажимную пластину 17 первого сцепления 4 с кольцевым фланцем 18. Маховик 2 снабжен несущим установочным диском 19, а ротор 6 размещен между диском 19 и фланцем 18 пластины 17 и концентрично охватывает пластину 1 7.
В качестве стартер-генератора могут быть использованы все переключаемые с генераторного на двигательный режим электрические машины с безобмоточным ротором, однако наиболее целесообразно применить работающую по принципу Шмидта-Лоренца гетерополярную электрическую машину (см. фиг. 3).
Пакет 8 статора 7 этой машины имеет разрьш 20 по окружности и снабжен проходными отверстиями 21 для установки распорных втулок 16 и кре- пежньк болтов 22. В пакете 8 статора 7 выполнены пазы 23, разделенные перемычками 24, и он оснащен группами 25, 26 и 27 рабочих обмоток. Каждая группа обмоток состоит из соответствующих рабочих обмоток 28, 29 и 30. Группы 25, 26 и 27 рабочих обмоток расположены по окружности
0
0
5
0
0
5
между соответствующими обмотками возбуждения 31 и 32, 33 и 34 и 35 и 36 и отделены друг от друга. Шаг пазов 23 статора 7 равен шагу зубцов 11 ротора 6.
Перемычки отдельных групп 25, 26 и 27 рабочих обмоток 28, 29 и 30 соответственно смещены на заданную часть шага по отношению к зубцам 11 ротора 6 таким образом, что по меньшей мере в одной группе рабочих обмоток зубцы 11 ротора находятся перед перемычками 24. Это обеспечива5 ется тем, что обмотки возбуждения 31 и 32, 33 и 34, 35 и 36 и рабочие обмотки 28, 29 и 30 расположены по окружности асимметрично статору 7. Электрическая машина выполнена много0 фазной (в приведенном примере исполнения - трехфазной). Группы обмоток 25, 26 и 27 предназначены для угловых секторов 120, однако смещены в направлении по окружности внутри
5 этих сегментных областей так, что свободное от обмоток пространство между группами 25 и 26 меньше, чем свободное пространство между группами 27 и 28, и последнее меньше, чем свободное пространство между группами 28 и 26. Каждая рабочая обмотка нагружена через соответствующие клеммы 37 и 38, 39 и 40, и 41 и 42, а каждая обмотка возбуждения - через соответствующие клеммы 43 и 44 управляющим устройством 45. Блок привода содержит расположенные по окружности статора на расстоянии друг от друга чувствительные элементы 46-48 по числу фаз, которые определяют соответствующее положение ротора 6 за счет импульсов, передаваемых на блок 45 управления. Чувствительные элементы могут быть выпол5 нены в виде индуктивных датчиков, либо в виде зондов Холла, либо в виде датчиков Вигонда, либо в виде датчиков другого типа. Дополнительно блок привода содержит датчик 49 для измерения числа оборотов ротора 6, датчик 50 для измерения числа оборотов двигателя 1 и датчики 51 и 52 для определения режима работы колес автомобиля. Сигналы с датчиков 49-52 поступают на управляющее устройство 53, куда также поступает сигнал от переключателя 54, связанного с педалью 55 газа, и от устройства 56 подвода топлива. Уп
равляю цим устройством 53 также связаны сервоустройства 57 и 58 для управления сцеплениями. Управляющее устройство содержит выключатель 59.
Согласно варианту исполнения блока привода (фиг. 4) маховик 2 имеет соединение с ведущим валом 3 двигателя с помощью первого сцепления А, которое расположено на стороне, удаленной от ведущего вала 3 двигателя 1 со стороны коробки 10 передач. На маховике 2 закреплен ротор 6 стартер- генератора 5, статор 7 которого закреплен на корпусе 9 двигателя 1. Соединение и разъединение коробки 10 передач с двигателем 1 осуществлется с помощью второго сцепления 13 В остальном блок привода устроен аналогично описанному вьш1е.
Блок привода работает следующим образом.
Если производится первичный пуск двигателя 1 автомобиля, первое 4 и второе 13 сцепления должны быть выключены . Это выполняют сервоустрой- ствами 57 и 58, которые настраивают через управляющее устройство 53 выключателем 59. После выключения обоих сцеплений через управляющее устройство 53 включают стартер-генератор 5, работающий в стартерном режиме и доводят его ротор до заданной частоты вращения, которая сообщается через датчик 49 управляющему устройству 53. Последнее соединяет вращаю- щийся с заданной частотой маховик 2 через первое сцепление 4 с ведущим валом 3 двигателя 1. Как только двигатель 1 запускается, стартер-генератор 5 через датчик 49 и сервоуст- ройство 58 переводится в генераторны режим работы. При нормальном режиме езды, когда двигатель 1 приводит автомобиль , второе сцепление 13 коробки 10 передач замкнуто. Приведение в действие этого сцепления при переключении с одной ступени в коробке 10 передач на другую осуществляют сервоустройством 58. При возникновении рабочих состояний, во время ко- торых двигатель 1 не приводит находящийся в движении автомобиль, в частности при движении накатом и при отпущенной педали 55 газа, переключатель 54 приходит в замкнутое со- стояние. Управляющее устройство 53 получает сигнал, выключающий второе сцепление 13 коробки 10 передач и пер
5
О 5
5
0
вое сцепление 4, при этом через предназначенный для ведущих валов колес автомобиля датчик 51, характеризующий режим езды, параметры состояния вводятся в управляющее устройство 53 и совместно обрабатываются.
Одновременно прерывается подвод топлива к двигателю через устройство 56 и отключается система зажи- . гания. Разъединенньш с коробкой передач и с двигателем маховик свободно вращается, а двигатель останавливается . Повторный запуск двигателя осуществляют педалью 55 газа, переключатель 54 размыкает, и на управляющее устройство 53 поступает сигнал . Управляющее устройство 53 сначала включает зажигание и открывает подачу топлива, а затем через сер- Iвоустройство 58 включает первое сцепление 4. За счет присоединения маховика 2 к ведущему валу 3 двигателя последний запускается.
Во время фаз свободного вращения маховика 2 нет необходимости включать обмотки стартер-генератора. Если при длительной остановке существует опасность снижения частоты вращения маховика 2 до такой величины, что накопленной во вращающейся массе энергии уже недостаточно для запуска двигателя, необходимо переключить стартер-генератор на работу в двигательном режиме, тем самым поддерживая маховик и связанньш с ним ротор электрической машины, вращающийся с минимальной частотой. Это нижнее граничное значение частоты вращения регистрируют с помощью датчика 49. Сигнал от этого датчика через управляющее устройство 53 переключает стартер-генератор в двигательный режим . С помощью датчика 50 измеряют частоту вращения двигателя и сигнал этого двигателя также направляют в управляющее устройство 53.
Стартер-генератор 5 выполнен в виде переключаемой с генераторного на двигательный режим работы электрической машины. В такой машине при работе ь режиме двигателя рабочие обмотки 28-30 нагружаются так, что их крутящий момент направлен в сторону вращения двигателя. Настройку той рабочей обмотки, которая создает с учетом соответствующего положения ротора, т.е. зубьев пакета ротора, максимальную окружную силу, осуществляет управляющее устройство 45 в зависимости от управляющих импульсов которые подаются на него от расположенных по окружности статора 7 чувствительных элементов 46-48.
В показанном на фиг. 3 примере исполнения электрической машины зубья 11 ротора 6 находятся конгру- энтно с каждой второй перемычкой 24 рабочей обмотки 28. В области группы обмоток 28 зубья ротора 6 находятся на малой угловой величине перед положением перекрытия с перемыч- ками статора 7, а в группе обмоток 26 угловая величина, на которой находятся зубья ротора перед перемычками статора в области рабочей обмотки 29, является приблизительно вдвое-большей, чем у перемычек статора в области рабочей обмотки 30. Если принять прямое вращение ротора согласно стрелке на фиг. 3, то запуск ротора происходит из показан- него на фиг. 3 положения, при этом рабочая обмотка 30 нагружается через управляющее устройство 45. Вследстви , возникающего за счет этого нагруже- ния магнитного потока зубья ротора занимают положение перекрытия с соот ветствуюп1ими перемычками пакета статора . В соответствии с создаваемым
за счет этого вращением ротора нахо- дящиеся конгруэнтно с перемычками 24 статора в области рабочей обмотки
28зубья ротора выходят из этого положения . В области рабочей обмотки
29создается действующая по окружности ротора вращающая сила. Следующее нагружение происходит в области группы обмоток 25. Этот процесс повторяется , причем чувствительные элементы 46-48 определяют соответствующее положение вращения ротора,
а полученные управляющие сигналы преобразуются в управляющем устройстве 45 для нагружения соответствующих рабочих обмоток. Таким образом происходит запуск двигателя, при это с помощью чувствительных элементов 46-48 определяется та рабочая обмотка для первичного нагружения, по отношению к которой зубья пакета ротора находятся в наиболее благоприятном положении в отношении достижения максимального окружного усилия. Применение изобретения позволяет существенно упростить блок привода за счет того, что одни и те же обмотки электрической машины служат для ее работы как в режиме двигателя, так и в режиме генератора, что обеспечивается их переключением с помощью логики элементов управления.
Sf
I I Ш 1LJJJ I I .
t-JEE-i J
re
I. /
ЗДШ1ШШ1ШШ .4
Ж1 .
/i5 3
4
t
u
j


Реферат

Формула
Комментарии