Уборочный комбайн с боковым движением скатной зерновой доски - RU2725817C2
Код документа: RU2725817C2
Чертежи





Описание
УРОВЕНЬ ТЕХНИКИ
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к уборочным комбайнам с одним или более обмолачивающими роторами.
2. Описание предшествующего уровня техники
Сельскохозяйственные уборочные комбайны содержат обмолачивающие роторы, которые вращаются относительно решеток подбарабанья для того, чтобы отделять зерна от остальных растительных материалов, таких как стебли и листья. Обмолачивающие роторы расположены поперечно или продольно относительно направления движения уборочной машины. Некоторые уборочные машины гибридного типа имеют поперечные, а также продольные обмолачивающие роторы. Комбайны, оборудованные только продольными обмолачивающими роторами, также известны как комбайны с осевой молотилкой. В данной области известны комбайны, снабженные единственным осевым ротором или сдвоенными роторами. Одно преимущество уборочного комбайна этого типа состоит в том, что роторы выполняют две функции: обмолот растительной массы и транспортировка отходов в направлении задней части уборочной машины.
Однако проблема, которая присуща комбайнам с осевой молотилкой, состоит в том, что зерна и легкая мякина, которые падают через подбарабанье, неравномерно распределяются по ширине уборочной машины. Этот материал падает на скатную зерновую доску, откуда он транспортируется дальше в сторону набора решет, где зерна отделяются от легкой мякины, не удаленной ранее в процессе обмолота. Смесь зерно/мякина, падающая через подбарабанье, имеет тенденцию скапливаться в отдельных областях скатной зерновой доски под ротором или роторами. Это приводит к неравномерным профилям материала на скатной зерновой доске, например, в виде перевернутого W-профиля в случае комбайна с двойным ротором или перевернутого V-профиля в случае единственного ротора. Этот профиль сохраняется, когда материал перемещается на решета, приводя к менее оптимальной эффективности решет.
При работе на боковых склонах проблема становится хуже, причем материал аккумулируется на нижней стороне скатной зерновой доски. Одно известное решение противодействия влиянию боковых склонов на распределение материала на скатной зерновой доске состоит в предоставлении продольных отделений на скатной зерновой доске, причем отделения разделены продольно расположенными разделителями в виде вертикальных разделительных стенок. Однако эти перегородки противодействуют любому перераспределению приведенных выше W или V профилей, которые являются всего лишь следствием осевого положения обмолачивающих роторов. Существующие уборочные машины, снабженные самовыравнивающейся скатной зерновой доской и/или самовыравнивающимися решетами или отделениями решет, также решают проблему боковых склонов. Однако эти системы являются технически сложными, дорогими и уязвимыми для технических сбоев.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к уборочному комбайну с движущейся в боковом направлении скатной зерновой доской. Настоящее изобретение относится к уборочному комбайну, содержащему один или более обмолачивающих роторов, установленных в уборочной машине, скатную зерновую доску и набор решет, при этом уборочная машина содержит приводной механизм, выполненный с возможностью управления продольным возвратно-поступательным движением скатной зерновой доски, а кроме того способный накладывать на указанное продольное возвратно-поступательное движение составляющую бокового возвратно-поступательного движения, т.е. составляющую движения, направленную к боковым сторонам уборочной машины. Скатная зерновая доска может не иметь продольных перегородок. Изобретение также относится к способу управления движением боковой скатной зерновой доски на основании измерения зерновой части стратифицированного слоя зерно/мякина, продвигающегося на скатной зерновой доске.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Упомянутые выше и другие признаки и преимущества этого изобретения, и способ их достижения, станут более очевидны, а изобретение будет лучше понятно посредством ссылки на следующее описание вариантов осуществления изобретения, сделанное в сочетании с сопровождающими чертежами, на которых:
Фиг.1 представляет собой вид сбоку варианта осуществления уборочного комбайна, оборудованного продольно расположенными обмолачивающими роторами согласно одному варианту осуществления настоящего изобретения;
Фиг.2 иллюстрирует возвратно-поступательное движение скатной зерновой доски в уборочной машине согласно настоящему изобретению;
Фиг.3 иллюстрирует датчик, подходящий для измерения толщины зерновой части стратифицированного слоя зерно/мякина на скатной зерновой доске;
Фиг.4 показывает подробный вид датчика, показанного на фиг.3;
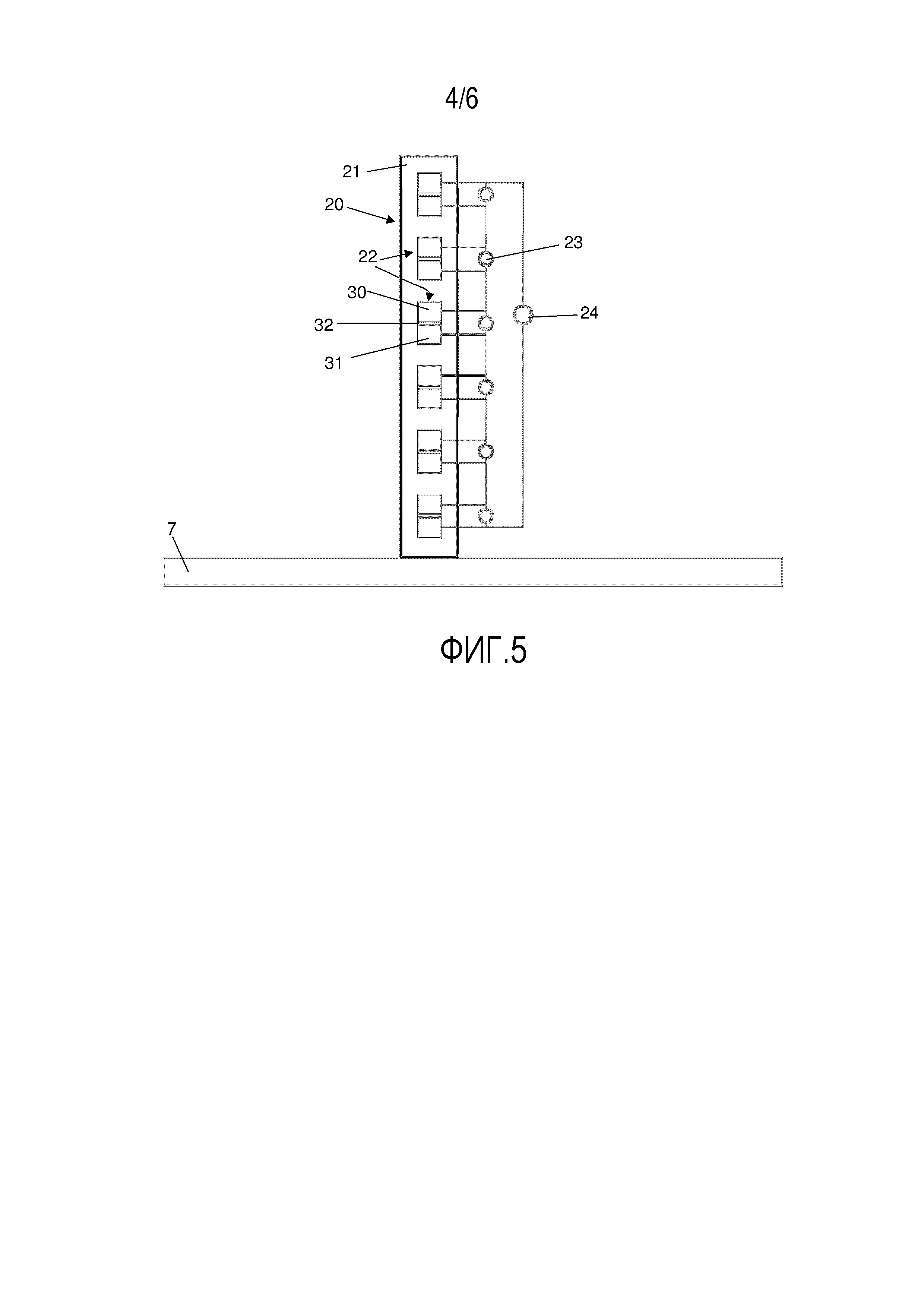
Фиг.5 иллюстрирует вариант осуществления датчика, снабженного емкостными сенсорными элементами, которые имеют большую контактную площадь с проходящим слоем зерно/мякина;
Фиг.6A показывает пример выходных значений, полученных от датчика, показанного на фиг.5, когда однородный слой зерно/мякина проходит мимо датчика;
Фиг.6B показывает другой пример выходных значений, полученных от датчика, показанного на фиг.5, когда полностью сегрегированный слой зерно/мякина проходит мимо датчика; а
Фиг.7 показывает вариант осуществления, содержащий множество датчиков, установленных на скатной зерновой доске, для измерения распределения зерен по ширине скатной зерновой доски.
Соответствующие ссылочные номера обозначают соответствующие детали на нескольких изображениях. Иллюстрации, показанные в этом документе, иллюстрируют варианты осуществления изобретения, и такие иллюстрации никоим образом не следует истолковывать, как ограничение объема правовых притязаний изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее со ссылкой на чертежи будут описаны предпочтительные варианты осуществления. Подробное описание не ограничивает объем правовых притязаний изобретения, который определяется только приложенной формулой изобретения.
Фиг.1 показывает основные компоненты уборочного комбайна с осевой молотилкой, установленного на передних и задних колесах 1 и 2. Растительная масса срезается в поле узлом 3 жатки и подается приемным транспортером 4 в единственный ротор или сдвоенный набор обмолачивающих роторов 5, расположенных вдоль продольного направления уборочной машины и немного наклоненных вверх относительно горизонтальной линии. Показана кабина 6 водителя, а также устройство очистки, содержащее скатную зерновую доску 7, набор решет 8 и воздуходувку 9 для сдувания легкого остального материала в сторону задней части уборочной машины. Зерна падают через решета и транспортируются узлом шнеков и зерноподъемника (не показано) в резервуар 10 для зерна. Следует иметь в виду, что несмотря на то, что показан уборочный комбайн с осевой молотилкой с одним или более роторами, расположенными в продольном направлении уборочной машины, настоящее изобретение может быть применимо к другим типам уборочных комбайнов, таких как поперечные или гибридные уборочные комбайны.
Решета 8 соединены с исполнительным механизмом, выполненным с возможностью совершения возвратно-поступательного движения решет в продольном направлении уборочной машины. Обычно это круговое движение в вертикальной плоскости, совершаемое кривошипным механизмом. В данной области известна эта особенность. Движение решет вызывает отделение зерен от любых оставшихся отходов, которые не сдула назад воздуходувка 9. Согласно изобретению, скатная зерновая доска 7 соединена с исполнительным механизмом, выполненным с возможностью совершения возвратно-поступательного движения скатной зерновой доски в продольном направлении уборочной машины, т.е. аналогично движению решет, и кроме того, выполненным с возможностью наложения составляющей бокового возвратно-поступательного движения на указанное продольное движение скатной зерновой доски, так что скатная зерновая доска может испытывать объединенное ориентированное продольно и в боковые стороны возвратно-поступательное движение, как проиллюстрировано на фиг.2: скатная зерновая доска способна двигаться между положениями 15 и 16 согласно возвратно-поступательному движению в боковые стороны, проиллюстрированному стрелками. Несмотря на то, что показана одна скатная зерновая доска 7, скатная зерновая доска 7, как известно, может быть одной из множества скатных зерновых досок или составной скатной зерновой доской.
Исполнительный механизм, применяемый к скатной зерновой доске 7, может быть реализован на практике согласно известным системам совершения возвратно-поступательного движения в продольном направлении, объединенном с боковой составляющей движения. Например, WO-A-2014/093922 описывает систему привода бокового качания, применяемого к решетам уборочного комбайна. Эта система без изменений может быть применена к скатной зерновой доске 7 в уборочной машине согласно изобретению. Управление этими системами позволяет управлять амплитудой боковой составляющей движения, прикладываемой к скатной зерновой доске, для управления посредством этого амплитудой и направлением объединенного возвратно-поступательного движения. Следует иметь в виду, что исполнительный механизм, применяемый для скатной зерновой доски 7, при необходимости также может применяться для одного или более решет 8.
Скатная зерновая доска 7 в уборочной машине согласно одному варианту осуществления изобретения не имеет продольных отделений, разделенных разделителями, чтобы не препятствовать униформизации V или W профиля. Приложение боковой составляющей движения к скатной зерновой доске 7, которая не содержит продольных отделений, приводит к улучшенному распределению зерен на скатной зерновой доске, перед перемещением зерен на решета 8. Любое возвратно-поступательное движение скатной зерновой доски (также продольное движение, которое применяется в современных уборочных машинах) выполняется с возможностью получения стратификации слоя, состоящего в основном из зерен и легкой мякины, вследствие разницы в плотности между зернами и мякиной: более тяжелые зерна перемещаются на дно слоя, при этом более легкая мякина скапливается сверху. Когда слой зерно/мякина приближается к выходному краю 11 скатной зерновой доски 7, предпочтительно, чтобы стратификация была как можно более полной, что облегчает процесс просеивания и удаление мякины воздуходувкой 9. Профиль с формой V или W, упоминаемый выше, относится к полной толщине слоя зерно/мякина в разных секциях скатной зерновой доски до выпускного края 11. Боковая составляющая движения, применяемая к скатной зерновой доске, будет действовать в направлении устранения профиля, т.е. Делать распределение зерен и мякины более равномерным по ширине скатной зерновой доски, когда слой приближается к выпускному краю 11.
Из экспериментов, проводимых на сдвоенных роторах, установленных на ровной местности (нулевом боковом склоне), авторы изобретения обнаружили, что движение в боковые стороны скатной зерновой доски может сделать однородным распределение зерновой части стратифицированного слоя перед тем, как сделать однородным распределение всего слоя. Другими словами, униформизация слоя зерна происходит быстрее, чем униформизация мякинной части. Это полезный вывод, заключающийся в том, что он позволяет реализовать алгоритм управления, основанный непосредственно на измерении зерновой части стратифицированного слоя. Так как зерновая часть становится однородной быстрее, чем полный слой, униформизация толщины полного слоя не является обязательным требованием, что позволяет оптимизировать необходимый размер скатной зерновой доски и/или необходимые амплитуды составляющих бокового движения для того, чтобы получить заданную степень униформизации.
Согласно одному варианту осуществления, комбайн согласно изобретению оборудован одним или более датчиками, которые могут измерять толщину зерновой части стратифицированного слоя на скатной зерновой доске. Фиг.3 иллюстрирует подходящий датчик 20, установленный на поверхности скатной зерновой доски 7. Датчик 20 установлен так, чтобы слой зерно/мякина двигался мимо по меньшей мере одной стороны датчика и в контакте с ней, например, по меньшей мере вдоль обеих сторон и в контакте с ними. На фиг.4 показан увеличенный вид датчика 20, который также показывает уровень слоя 19 смеси зерно/мякина, который продвигается на скатной зерновой доске 7. Датчик 20 содержит вертикальную опорную конструкцию 21, которая представляет собой башневидную конструкцию, предпочтительно в виде плоского элемента, такого как жесткая прямоугольная полоса, установленная вертикально на поверхности скатной зерновой доски 7, параллельно направлению движения слоя зерно/мякина. К опорной конструкции 21 прикреплено множество сенсорных элементов 22, расположенных в вертикальном пакете, т.е. одна над другой, и разделенных предпочтительно (но не обязательно) постоянным промежутком. На фиг.4 показано только шесть сенсорных элементов 22. Однако количество сенсорных элементов не ограничено и может быть определено на основании типа используемых сенсорных элементов, их размера и ожидаемой или допустимой максимальной толщины слоя, который должен перемещаться по скатной зерновой доске 7. Например, считается, что для большинства целей подходит сенсорная башня 20 с высотой приблизительно 20 см, содержащая 12 разделенных равными промежутками сенсорных элементов (т.е. разделенных промежутками приблизительно 1,5 см). Согласно варианту осуществления, размер одного сенсорного элемента 22 приблизительно составляет размер одного зерна растительного материала, который обрабатывается в уборочной машине.
Сенсорные элементы 22 выполнены с возможностью измерения электрического свойства, которое изменяется в зависимости от непосредственного окружения сенсорного элемента. Кроме того, сенсорные элементы 22 выполнены с возможностью считывания независимо друг от друга. Другими словами, каждый сенсорный элемент 22 соединен с отдельным считывающим средством 23. Сенсорные элементы могут работать от единого источника 24 энергии, как показано в варианте осуществления фиг.4, или от отдельных источников энергии (например, по одному для каждого сенсорного элемента). Считывающее средство 23 и источник 24 энергии схематично показаны на фиг.4 для иллюстрации возможности их подключения к сенсорным элементам 22, и не следует их интерпретировать, как необходимую часть датчика 20. Однако источник электроэнергии может быть включен в датчик (напр., аккумулятор). Следует понимать, что считывающее средство 23 содержит средство измерения электрического свойства (которое может быть включено или не включено в датчик) и средство взаимодействия средства измерения с оператором для показа результата измерения и предоставления оператору возможности изменения настроек. Обычно средство взаимодействия может находиться в кабине водителя комбайна. На практике, считывающее средство и средство питания могут быть выполнены согласно любой подходящей технологии датчиков, известной в данной области. Провода от сенсорных элементов 22 к источнику (источникам) энергии и считывающему средству могут быть включены в вертикальную опорную конструкцию 21, которая может содержать интерфейс для соединения указанных проводов с подходящими устройствами питания и считывающими устройствами, расположенными в кабине водителя комбайна или управляемыми из нее.
Сенсорные элементы 22 способны проводить различие между первым условием, когда датчик находится в контакте с воздухом, и вторым условием, когда датчик находится в контакте со слоем смеси зерно/мякина. Так как сенсорные элементы выполнены с возможностью считывания независимо друг от друга, они также способны проводить различие между множеством слоев в стратифицированном слое смеси зерно/мякина, при условии, что сенсорные элементы обладают подходящей чувствительностью, необходимой для проведения этого различия. Например, когда используют емкостные сенсорные элементы, элементы должны быть способны обнаруживать идентифицируемое изменение емкости, когда датчик находится в контакте со слоем зерна по сравнению с тем, когда датчик находится в контакте со слоем остаточного материала мякины.
Кроме емкостных датчиков в качестве сенсорных элементов 22 можно использовать другие типы датчиков, такие как, например, датчики вихревых токов, радарные датчики, ультразвуковые датчики, потенциометры, тензодатчики и т.д. При необходимости можно использовать существующие типы имеющихся на рынке датчиков. Емкостными сенсорными элементами 22, которые подходят для использования в датчике 20 изобретения, являются, например цилиндрический датчик типов CS005 или CS02 от Micro-Epsilon. Когда используют цилиндрические сенсорные элементы, их предпочтительно устанавливают продольной осью параллельно направлению движения слоя зерно/мякина, т.е. перпендикулярно пакету сенсорных элементов 22. По причине того, что цилиндрические сенсорные элементы могут образовать более крупное препятствие для продвигающегося слоя, предпочтение отдается плоским сенсорным элементам, таким как CSG02FL-CRm1,4 от Micro-Epsilon. Плоские сенсорные элементы устанавливают с плоской стороной, прикрепленной к опорной конструкции 21 таким образом, чтобы образовать меньшее препятствие для продвигающегося слоя. Сенсорные элементы, будь они цилиндрическими, плоскими и прочими, также могут быть включены в толщину опорной конструкции 21, напр., в опорную конструкцию, снабженную полостями, в которую вставляют цилиндрические или плоские сенсорные элементы. Согласно одному варианту осуществления, вертикальная опора 21 состоит или содержит PCB плату, которая содержит сенсорные элементы 22, а также проводники, которые соединяют сенсорные элементы со считывающим средством и средством питания 23/24. В случае плоских сенсорных элементов особенно, это предоставляет способ получения тонкой вертикальной сенсорной башни с абсолютно плоскими боковыми стенками, которые, вследствие этого, представляют собой минимальное препятствие для слоя зерно/мякина 19, когда он движется через устройство очистки комбайна.
Фиг.5 показывает один возможный вариант осуществления датчика 20, при этом сенсорными элементами 22 являются емкостные датчики, содержащие плоскую верхнюю электропроводную пластину 30, плоскую нижнюю электропроводную пластину 31 и диэлектрический элемент 32 между ними в контакте с двумя пластинами, при этом, когда датчик помещают на опорную поверхность 7, пластины устанавливаются в одной и той же вертикальной плоскости. Другими словами, пластины 30/31 перпендикулярны скатной зерновой доске 7 и параллельны направлению движения слоя зерно/мякина. Когда опорная конструкция 21 представляет собой плоскую полосу, как в случае фиг.5, проводящие пластины 30/31 параллельны опорной конструкции. Диэлектрический элемент 32 также может быть плоским и иметь такую же толщину, как пластины 30/31 (в направлении перпендикулярно чертежам). Пластины соединены со считывающим средством 23, выполненным с возможностью измерения емкости между пластинами 30/31, и с источником 24 энергии, выполненным с возможностью создания разности потенциалов между пластинами 30/31. Вместо друг над другом пластины 30/31 также могут быть установлены бок-о-бок с диэлектрическим элементом 32, ориентированным вертикально вместо горизонтально. Плоская конструкция сенсорных элементов 22 согласно этому варианту осуществления обеспечивает большую контактную площадь с движущейся смесью зерно/мякина, что приводит к более высокой чувствительности сенсорных элементов, а также к более стабильному выходному значению. Сенсорные элементы 22 согласно этому варианту осуществления могут быть включены в PCB плату, наряду с необходимой проводкой, соединяющей пластины 30/31 со средством питания и считывающим средством 24/23.
Фиг.6A показывает обычный выходной сигнал из датчика 20, когда мимо датчика проходит однородный слой зерно/мякина, т.е. слой, в котором не прошла стратификация. Датчик снабжен 12 сенсорными элементами S1-S12. Вертикальная ось показывает электрическое свойство, которое считывает считывающее средство 23, напр., емкость C. Горизонтальная ось показывает положения сенсорных элементов по высоте опорной конструкции 21. Толщину D1 слоя зерно/мякина можно оценивать по среднему положению между сенсорными элементами S6 и S7, между которыми выходной сигнал датчика изменяется от заданного приблизительно постоянного значения, соответствующего емкости, когда сенсорные элементы находятся в контакте со слоем, до нижнего значения, соответствующего емкости, когда сенсорные элементы находятся в контакте с воздухом.
Фиг.6B показывает выходной сигнал от того же датчика для полностью сегрегированного слоя такой же толщины D1. Сенсорные элементы S1-S3, которые погружены в слое зерна, обнаруживают большую емкость, чем сенсорные элементы S4-S6, погруженные в слой мякины. Обнаружение этого изменения выходных значений позволяет произвести оценку толщины D2 слоя зерна и толщины D3 слоя мякины. Это различие между зерном и мякиной является прямым следствием возможности независимого друг от друга считывания сенсорных элементов S1-S12.
Если уборочная машина наклонена под углом бокового наклона, боковая составляющая движения скатной зерновой доски допускает не только выравнивание W или V распределения, которое обусловлено продольной ориентацией обмолачивающих роторов, но также вызываемым силой тяжести скоплением зерен и мякины на нижней стороне скатной зерновой доски.
Скатная зерновая доска предпочтительно не самовыравнивается, когда уборочная машина наклоняется в боковом направлении, т.е. способность бокового качания скатной зерновой доски предпочтительно является единственной мерой, предпринимаемой для выравнивания материала на скатной зерновой доске в случае бокового уклона. Согласно одному варианту осуществления, решета 8 выполнены с возможностью совершения возвратно-поступательных движений только в продольном направлении, а не в боковом направлении. Уборочный комбайн согласно изобретению, в котором только скатная зерновая доска 7 способна совершать боковое движение, является предпочтительным в том, что скатная зерновая доска является менее тяжелой и менее технически сложной, чем решета 8. Весовая разница приводит к боковому движению, имеющему меньшее воздействие на общие вибрации комбайна, вызванные указанным боковым движением. Уменьшенная техническая сложность приводит к боковому движению, менее вероятно вызывающему техническую неисправность. Например, решета содержат большое число подвижных жалюзей, содержащих маленькие детали, которые уязвимы для дефектов, вызванных силами вибрации. Боковое движение скатной зерновой доски особенно предпочтительно в уборочном комбайне с осевой молотилкой, при условии, что появление профилей (напр. W или V, как упоминалось выше) наиболее выражено в начале процесса обмолота, т.е. Непосредственно над скатной зерновой доской.
Возможно, решета могут быть выполнены с возможностью самовыравнивания в боковом направлении. Решета могут состоять из множества продольных секций, каждая из которых самовыравнивается отдельно. Уборочная машина согласно изобретению, которая оборудована качающейся в боковом направлении, но не самовыравнивающейся скатной зерновой доской 7, как описано выше, совершающими продольное возвратно-поступательное движение, но не качающимися в боковом направлении решетами 8, причем эти решета также не являются самовыравнивающимися, представляет собой эффективную альтернативу в показателях компенсации влияния бокового уклона, по сравнению с существующими уборочными машинами, которые имеют более сложные и дорогие решения этой проблемы.
Согласно одному возможному варианту осуществления, амплитуда боковой составляющей движения, наложенной на скатную зерновую доску 7, определяется на основе выходного сигнала одного или более датчиков, выполненных с возможностью измерения рабочих параметров уборочной машины. Этими параметрами может быть один или более из следующего неограничивающего списка параметров: толщина слоя зерно-мякина на скатной зерновой доске 7, стратификация слоя на скатной зерновой доске и толщина зерновой части стратифицированного слоя на выпускном краю 11 скатной зерновой доски или поблизости от него, распределение зерен в направлении по ширине скатной зерновой доски.
Эти три параметра могут измеряться датчиками 20, установленными вертикально на поверхности скатной зерновой доски и ориентированными в продольном направлении уборочной машины, как описано со ссылкой на Фиг.3-6. Распределение толщины слоя в направлении по ширине может измеряться с помощью установки множества датчиков 20 по ширине скатной зерновой доски, вблизи выпускного края 11 скатной зерновой доски 7, как проиллюстрировано на фиг.7 с углом бокового наклона уборочной машины.
Амплитуду боковой составляющей движения можно регулировать автоматически на основе этих одного или более параметров согласно подходящему алгоритму, реализованному в блоке управления, который электрически соединен и принимает входные данные от одного или более датчиков и генерирует выходной сигнал, рассчитываемый по алгоритму. Изобретение конкретно относится к способу управления возвратно-поступательным движением скатной зерновой доски уборочной машины согласно изобретению, при этом толщину зерновой части стратифицированного слоя измеряют вблизи выпускного края 11 скатной зерновой доски 7, во многих положениях по ширине скатной зерновой доски (напр., с помощью сенсорного устройства, как показано на фиг.7). Для того, чтобы сделать минимальной разницу между измеренной толщиной слоя зерна во многих положениях, блок управления регулирует амплитуду боковой составляющей движения, наложенной на скатную зерновую доску.
Несмотря на то, что это изобретение было описано в отношении по меньшей мере одного варианта осуществления, настоящее изобретение может быть дополнительно модифицировано в рамках сущности и объема этого изобретения. Вследствие этого, эта заявка охватывает любые разновидности, варианты применения или адаптации изобретения, использующие его общие принципы. Кроме того, это заявка охватывает такие отклонений от настоящего раскрытия, которые попадают в пределы известной или общепринятой практики в области, к которой относится это изобретение, и которые попадают в рамки объема приложенной формулы изобретения.
Реферат
Группа изобретений относится к сельскому хозяйству. Уборочный комбайн содержит узел обмолота, содержащий один или более обмолачивающих роторов, установленных в уборочной машине; скатную зерновую доску, выполненную с возможностью приема смеси зерен и мякины из узла обмолота и совершения возвратно-поступательного движения в продольном направлении уборочной машины; одно или более решет, выполненных с возможностью приема слоя зерен и мякины со скатной зерновой доски и совершения возвратно-поступательного движения в продольном направлении уборочной машины; приводной механизм, выполненный с возможностью управления продольным возвратно-поступательным движением скатной зерновой доски, а также способный накладывать на указанное продольное возвратно-поступательное движение составляющую бокового возвратно-поступательного движения, и блок управления, выполненный с возможностью приема входных сигналов, отображающих один или более параметров, связанных с работой уборочного комбайна, при этом указанный блок управления также выполнен с возможностью вычисления боковой составляющей движения скатной зерновой доски в зависимости от указанных входных сигналов; и подачи сигнала управления указанному приводному механизму, подающему приводному механизму команду наложения вычисленной боковой составляющей движения на указанное продольное возвратно-поступательное движение скатной зерновой доски. Способ управления возвратно-поступательным движением скатной зерновой доски уборочного комбайна. 2 н. и 13 з.п. ф-лы, 8 ил.
Комментарии