Способ работы зерноуборочного комбайна и зерноуборочный комбайн - RU2758094C2
Код документа: RU2758094C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к способу работы зерноуборочного комбайна с признаками ограничительной части пункта 1 формулы изобретения, а также к зерноуборочному комбайну, предназначенному для осуществления этого способа, с признаками ограничительной части пункта 15.
Уровень техники
Зерноуборочные комбайны служат для жатвы и обмолота зерновых культур. При этом обмолот производится молотильным аппаратом, который из убираемой культуры, захваченной зерноуборочным комбайном посредством жатки, получает зерно, подводимое после молотьбы, сепарирования и последующей очистки к зерновому бункеру. Среди прочих составных частей убираемой культуры остаются, например, мякина и солома, которые либо могут быть распределены по полю, либо - в случае соломы - уложены в валок, например, для последующего подбора пресс-подборщиком. Здесь и далее под термином "убираемая культура" понимают весь поток материала, принятый молотильным аппаратом, то есть включая те зерна, которые еще не получены из убираемой культуры в качестве собранного зерна, и те зерна, которые, возможно, остаются в потоке убираемой культуры в виде потерь и складываются вместе с соломой.
В молотильном аппарате зерно, по существу, извлекают (вымолачивают) из соломы путем трения в процессе прокатывающей обработки и отделяют от остального потока убираемой культуры, так что оно может быть подано непосредственно на очистку. Оставшийся поток убираемой культуры после этого подводят к сепарационному участку, в котором, например, посредством соломотряса оставшееся зерно отделяют от потока убираемой культуры и после этого также подводят на очистку.
Эффективность процесса уборки урожая достигается за счет управления рабочими органами посредством системы помощи водителю. Основываясь на стратегии управления процессом, система помощи водителю автоматически определяет по меньшей мере один технический параметр рабочих органов, причем определенный технический параметр соответствующего рабочего органа предварительно задают (патентный документ DE 10 2013 106 131 А1). В этом известном способе предусмотрена автоматическая смена стратегии управления процессом посредством системы помощи водителю, если предварительно заданный критерий качества не выполняется. Таким образом, возможно осуществление особенно высокой эффективности процесса уборки урожая.
В известном способе сложность состоит в том, чтобы обеспечить высокую эффективность процесса уборки урожая для разных видов культур, которые требуют по меньшей мере частично различающихся вариантов конфигурации оборудования.
Раскрытие сущности изобретения
В основе изобретения лежит задача разработки и усовершенствования известного способа, чтобы эффективность процесса уборки урожая увеличилась также при обмолоте разных видов культур.
Вышеобозначенная задача решена способом согласно ограничительной части пункта 1 формулы с признаками отличительной части пункта 1 формулы.
Существенно принципиальное соображение о том, что стратегию управления процессом, лежащую в основе процесса уборки урожая, предварительно выбирают и/или параметризуют на основании характеристик убираемой культуры и конфигурации оборудования. Для этого характеристики убираемой культуры и конфигурацию оборудования определяют заранее посредством системы помощи водителю.
Предложенное решение позволяет, с одной стороны, реагировать соответствующим образом на вид культуры, подлежащей обмолоту. С другой стороны, стратегия управления процессом в каждом случае определена преобладающей конфигурацией оборудования, которая в свою очередь может зависеть от характеристик убираемой культуры. В результате, согласно предложенному решению получают оптимальный предварительный выбор, или параметризацию, стратегии управления процессом.
В предпочтительных вариантах осуществления согласно пунктам 2 и 3 формулы изобретения стратегия управления процессом содержит управление или регулирование, соответствующие методы осуществления которых зависят от характеристик убираемой культуры и от конфигурации оборудования. Эти методы осуществления, адаптируемые к соответствующим характеристикам и конфигурациям, особенно просто реализовать при управлении на основе совокупности характеристик согласно пункту 3.
В предложенном решении в любом случае происходит предварительный выбор стратегии управления процессом, так как в ходе процесса уборки урожая стратегию управления процессом оптимизируют или заменяют другой стратегией управления процессом (пункт 4). В этом отношении предварительно выбранная стратегия управления процессом образует в любом случае исходную стратегию, которую соответствующим образом развивают дальше в ходе процесса уборки урожая.
Следующий предпочтительный вариант осуществления согласно пункту 8 относится к легко автоматизируемой возможности предварительного выбора стратегии управления процессом, в рамках которого каждой стратегии управления процессом соответствует по меньшей мере одно условие, относящееся к характеристикам убираемой культуры, и по меньшей мере одно условие, относящееся к конфигурации оборудования. Соответствующие условия можно легко модифицировать, так что существует возможность без труда адаптировать систематику, лежащую в основе предварительного выбора, к изменяющимся общим условиям.
Следующие предпочтительные варианты осуществления согласно пунктам 10-14 относятся в первую очередь к обмолоту кукурузы, который как к управлению или регулированию, так и к конфигурации оборудования предъявляет совсем иные требования, которые отличаются от требований обмолота других видов зерновых, таких, как пшеница, ячмень, овес и т.п. Благодаря предложенному решению возможно автоматическое определение и задание параметров оборудования за счет адаптации стратегии управления процессом, как предложено выше, к характеристикам убираемой культуры и к конфигурации оборудования.
В соответствии со следующим техническим решением согласно пункту 15, которое имеет самостоятельное значение, заявлен зерноуборочный комбайн как таковой для осуществления предложенного способа. На все варианты осуществления, предназначенные для предложенного способа, может быть сделана ссылка и для разъяснения зерноуборочного комбайна.
Краткое описание чертежей
Ниже изобретение разъяснено более подробно на основе чертежей, иллюстрирующих варианты осуществления. На чертежах показаны:
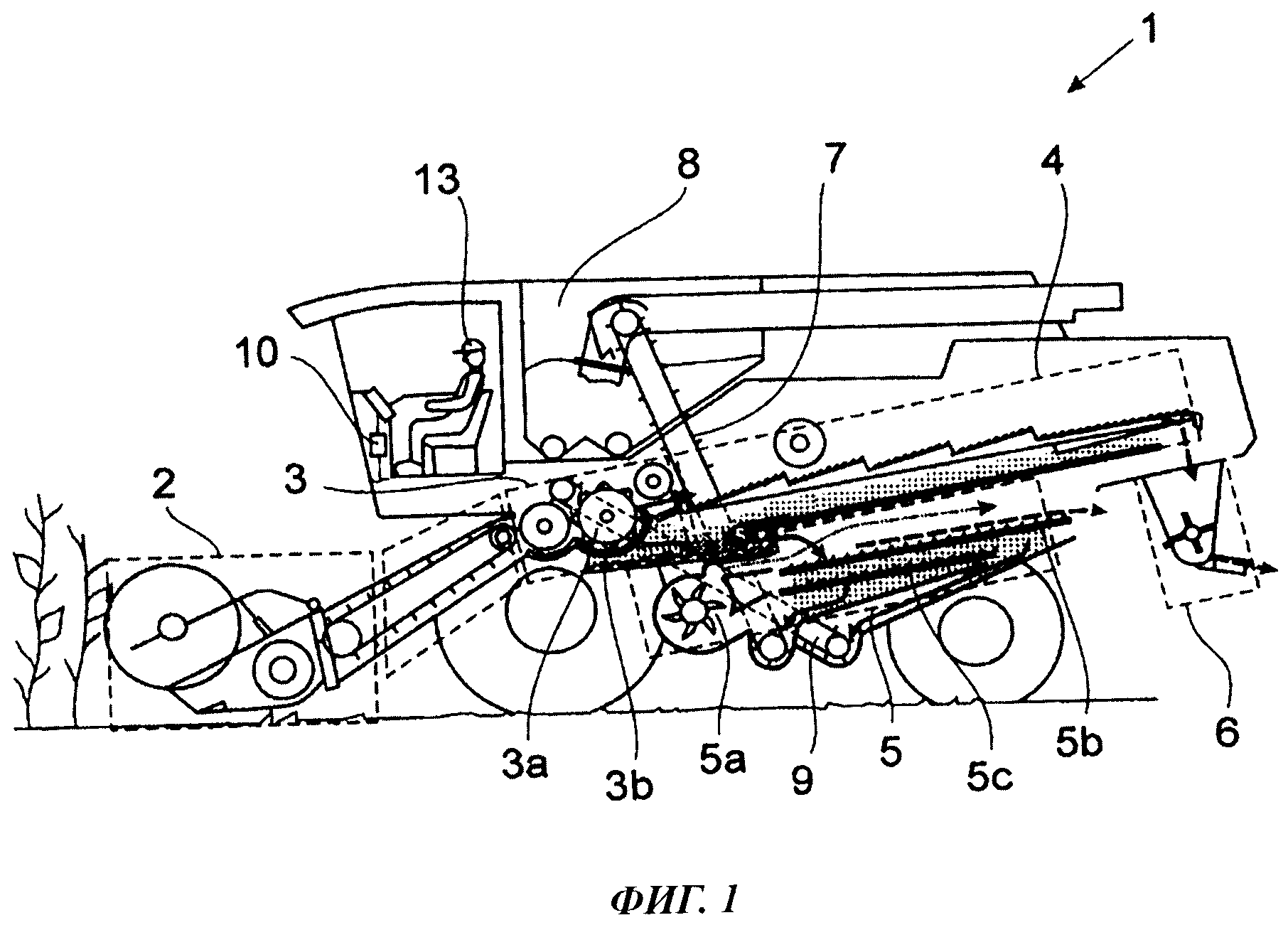
фиг. 1: вид сбоку предложенного зерноуборочного комбайна для осуществления предложенного способа и
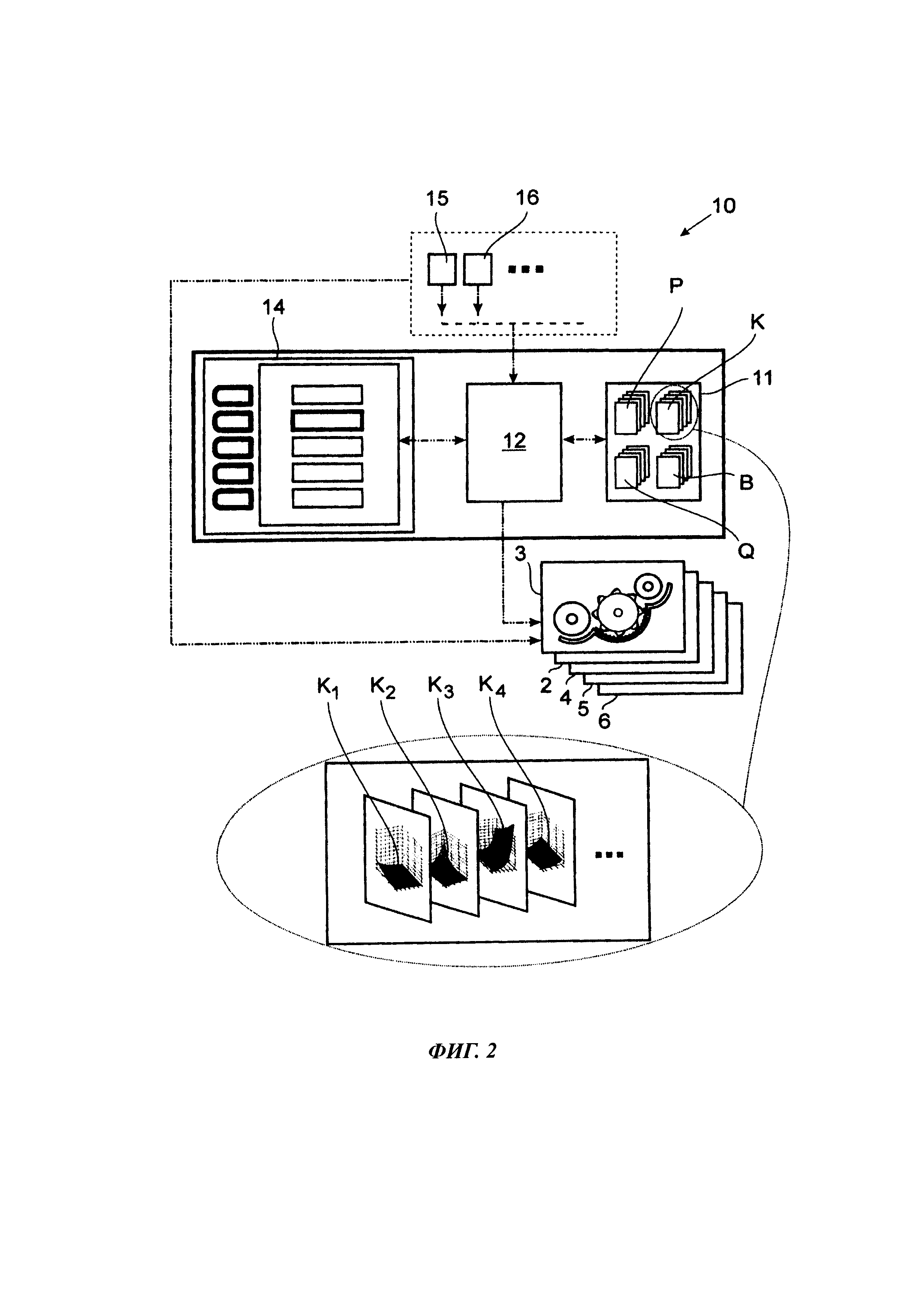
фиг. 2: схематичное изображение системы помощи водителю зерноуборочного комбайна согласно фиг. 1.
Осуществление изобретения
Сельскохозяйственная рабочая машина 1, изображенная на фиг. 1, выполнена в виде зерноуборочного комбайна и служит, соответственно, для выполнения сельскохозяйственного процесса уборки урожая. Зерноуборочный комбайн 1 содержит рабочие органы: жатку 2, молотильный аппарат 3, сепарирующее устройство 4, очистное устройство 5 и распределительное устройство 6.
В то время как жатка 2 служит для срезания и захвата убираемой культуры, задачей молотильного аппарата 3 является обмолачивание принятой убираемой культуры до получения зерна. При этом под убираемой культурой понимают весь материал, принятый из посевов и подведенный к молотильному аппарату 3, причем термином "зерно" обозначают зерна, получаемые зерноуборочным комбайном из убираемой культуры.
Молотильный аппарат 3 оснащен молотильным барабаном 3а, который взаимодействует с подбарабаньем 3b. После него поток убираемой культуры, подведенный к молотильному аппарату 3, уже без извлеченного здесь зерна подают на сепарирующее устройство 4.
Молотильный аппарат 3 служит, по существу, для извлечения большей части зерна из убираемой культуры за счет трения в процессе молотьбы. После этого в сепарирующем устройстве 4 убираемую культуру с оставшейся в ней частью зерна перемещают, например трясут, таким образом, что оставшееся зерно также в максимальной степени отделяют от соломы и прочей убираемой культуры. Затем зерно, полученное в молотильном аппарате 3 и в сепарирующем устройстве 4, подводят к очистному устройству 5. Потом в очистном устройстве 5, которое обычно выполнено многоступенчатым, от зерна отделяют незерновые компоненты, содержащиеся в зерне, например мякину и части соломы, а также необмолоченный материал, например вершины колосьев или ости. Затем очищенное зерно посредством транспортного устройства 7, например элеватора, попадает в зерновой бункер 8. Обмолоченную солому, то есть оставшуюся в сепарирующем устройстве 4 убираемую культуру, зерноуборочный комбайн 1 укладывает, например, в виде валка вдоль колеи своего движения.
Часть убираемой культуры, которую в очистном устройстве не подают на транспортное устройство 8 и не укладывают вышеуказанным образом, попадает в так называемый недомолот, который снова подводят к молотильному аппарату 3. В случае очистного устройства 5с очистным вентилятором 5а и просеивающим устройством, которое содержит, в частности, верхнее решето 5b и нижнее решето 5с, в недомолот 9 попадает та часть убираемой культуры, которая проходит сквозь верхнее решето 5b, но не проходит сквозь нижнее решето 5с и, кроме того, слишком тяжела, чтобы выдуваться посредством очистного вентилятора 5а в направлении распределительного устройства 6. Управление рабочими органами 2-6 зерноуборочного комбайна 1 может быть осуществлено посредством соответствующего задания различных параметров оборудования. Например, для молотильного аппарата 3 в зависимости от конфигурации оборудования к ним относятся параметры привода, например число оборотов барабана или прочие параметры движения молотильного барабана, а также зазор подбарабанья, т.е. расстояние между молотильным барабаном 3а и подбарабаньем 3b. Если молотильный аппарат 3 содержит остеотделители, их регулирование также возможно в рамках управления молотильным аппаратом 3.
Кроме того, предложенный зерноуборочный комбайн 1 имеет систему 10 помощи водителю для управления рабочими органами 2-6. Эта система 10 помощи водителю содержит память 11 для сохранения данных, то есть память в информационно-техническом смысле, и вычислительное устройство 12 для обработки данных, сохраненных в памяти 11. Система 10 помощи водителю, по существу, предназначена для поддержки оператора 13 зерноуборочного комбайна 1 при обслуживании зерноуборочного комбайна 1. Система 10 помощи водителю с памятью 11 и вычислительным устройством 12 показана на фиг. 2.
В памяти 11 системы 10 помощи водителю сохранено несколько стратегий Р управления процессом, каждая из которых направлена на выполнение по меньшей мере одного соответствующего критерия Q качества. При этом система 10 помощи водителю автоматически определяет по меньшей мере один параметр оборудования для рабочих органов 2-6 и задает его соответствующему рабочему органу 2-6.
Вышеупомянутый критерий Q качества - это, например, настройка или оптимизация таких параметров процесса уборки урожая, как "потери при обмолоте", "доля битого зерна", "высота слоя", "потери при сепарировании", "потери при очистке", "загруженность молотильного аппарата" или "расход топлива". Стратегия управления процессом содержит в общем случае систематику, в соответствии с которой должно быть достигнуто выполнение того или иного критерия качества. При этом, в частности, речь идет о соответствующих заданных управляющих или регулирующих величинах, как подробно разъяснено ниже.
Здесь существенно то, что посредством системы 10 помощи водителю определяют как характеристики убираемой культуры, в частности вид культуры, подлежащей уборке, так и конфигурацию оборудования, причем на основании определенных характеристик убираемой культуры и определенной конфигурации оборудования предварительно выбирают стратегию Р управления процессом из стратегий управления процессом, сохраненных в памяти 11. Тем самым, по существу, обеспечивают направленность стратегии управления процессом не только на вид культуры, подлежащей уборке, но и на фактически имеющуюся в наличии конфигурацию оборудования. Например, в зависимости от механической конфигурации молотильного аппарата, в частности, в зависимости от конкретного исполнения подбарабанья, могут оказаться оптимальными совершенно различные стратегии управления процессом. То же самое относится к остальным рабочим органам 2-6. Еще один пример разъяснен ниже для очистного устройства 5. Как показано выше, предварительно выбранная стратегия Р управления процессом содержит обновление или регулирование, направленное на выполнение по меньшей мере одного соответствующего ей критерия качества. Здесь под понятием "управление" подразумевают определение параметров оборудования без предусмотренной обратной связи в значении техники регулирования. Под понятием "регулирование" подразумевают такое определение параметров оборудования, при котором предусмотрена соответствующая обратная связь в смысле техники регулирования. Далее, управляющие или регулирующие параметры для управления или регулирования предпочтительно зависят от характеристик убираемой культуры и от конфигурации оборудования. В этом отношении выбор стратегии управления процессом в результате может быть выполнен посредством простой параметризации управления или регулирования.
Управление или регулирование, соответствующее стратегии Р управления процессом, представляет собой в данном и предпочтительном случае управление или регулирование, основанное по меньшей мере на одной совокупности К характеристик, причем по меньшей мере одна совокупность К характеристик зависит от характеристик убираемой культуры и от конфигурации оборудования. По существу, могут быть предусмотрены такие различные стратегии управления процессом, которые отличаются друг от друга, соответственно, лежащими в их основе совокупностями характеристик управления или регулирования.
В соответствии с предложенным выше соответствующую стратегию Р управления процессом выбирают посредством системы 10 помощи водителю лишь предварительно. Это в данном и предпочтительном случае означает, что процесс уборки урожая осуществляют сначала на основе предварительно выбранной стратегии Р управления процессом, причем в ходе процесса уборки предварительно выбранную стратегию управления процессом оптимизируют или заменяют другой стратегией управления процессом. В результате, понятие "предварительный выбор" в данном случае означает, что предварительно выбираемая стратегия управления процессом может подвергаться изменениям в ходе процесса.
Как показано выше, под характеристиками убираемой культуры подразумевают по крайней мере вид культуры, подлежащей уборке, например "пшеница", "ячмень", "овес", "кукуруза", и т.п. Однако характеристики убираемой культуры, по существу, могут содержать и такие сведения о посевах, как плотность посевов, влажность посевов и т.п.
Конфигурация оборудования содержит в данном и предпочтительном случае оснащение механическими элементами и/или техническими элементами управления по меньшей мере одного рабочего органа 2-6. Также, как уже показано, конфигурация оборудования на примере молотильного аппарата 3 может содержать конфигурацию молотильного аппарата 3 с разными подбарабаньями 3b. При этом, как правило, предусмотрено, что конфигурацию оборудования задают в зависимости от характеристик убираемой культуры. Например, уборка кукурузы подразумевает изменение конфигурации оборудования применительно к молотильному барабану 3а, подбарабанью 3b, решетам 5а и 5b очистного устройства 5 и т.п.
По существу, может быть предусмотрено предварительное задание разных параметров оборудования для рабочих органов 2-6 в зависимости от конфигурации оборудования. Тогда система 10 помощи водителю предпочтительно определяет разные параметры оборудования в зависимости от конфигурации оборудования. В простом случае, который разъяснен ниже, конфигурация оборудования, при которой у очистного устройства 5 отсутствует нижнее решето 5с, означает, что параметр оборудования "размер отверстий нижнего решета" не может быть учтен в стратегии управления процессом. В противном случае фактическая конфигурация оборудования отличалась бы от конфигурации, лежащей в основе стратегии управления процессом, так что предварительно заданные критерии качества не могли бы быть выполнены обычным образом.
Для предварительного выбора стратегии Р управления процессом посредством системы 10 помощи водителю допустимы различные предпочтительные варианты. В данном и предпочтительном случае это выполнено так, что предварительный выбор стратегии Р управления процессом посредством системы 10 помощи водителю выполняют посредством опроса сохраненных в памяти 11 условий В, причем для этого в памяти 11 по меньшей мере одной стратегии Р управления процессом соответствует по меньшей мере одно условие, относящееся к характеристикам убираемой культуры и по меньшей мере одно условие, относящееся к конфигурации оборудования. Стратегию Р управления процессом выбирают посредством системы 10 помощи водителю только в том случае, если все условия, соответствующие такой стратегии управления процессом, выполнены. Например, стратегии Р управления процессом, ориентированной на уборку урожая кукурузы, может соответствовать первое условие, по которому под видом культуры должна подразумеваться кукуруза, и второе условие, по которому конфигурация оборудования содержит предназначенное для кукурузы подбарабанье 3b, а решета 5b, 5с очистного устройства 5 имеют предназначенный для кукурузы размер отверстий.
Представленный и в этом отношении предпочтительный зерноуборочный комбайн 1 содержит упомянутые выше рабочие органы: жатку 2, молотильный аппарат 3, сепарирующее устройство 4 и очистное устройство 5. Для предложенного решения представляет интерес тот факт, что для изменения конфигурации оборудования по меньшей мере один из этих рабочих органов 2-6 выполнен с возможностью его конфигурирования. При этом возможна адаптация зерноуборочного комбайна 1 к виду культуры, подлежащей уборке.
Определение характеристик убираемой культуры может быть выполнено совершенно различным образом. В простейшем случае характеристики убираемой культуры запрашивают от оператора посредством интерфейса 14 "человек - машина" системы 10 помощи водителю. Допустима, однако, также возможность предусмотреть датчик 15 передней зоны поля, который регистрирует характеристики убираемой культуры, в частности вид культуры.
Аналогичное решение относится к определению конфигурации оборудования. Здесь также может быть предусмотрен запрос конфигурации оборудования от оператора посредством интерфейса 14 "человек - машина" или регистрация конфигурации оборудования посредством соответствующего датчика 16 оборудования.
В данном и предпочтительном случае очистное устройство 5, как показано выше, содержит очистной вентилятор 5а, верхнее решето 5b и нижнее решето 5с, причем для управления очистным устройством 5 объемный поток очистного вентилятора 5а и/или размер отверстий верхнего решета, и/или размер отверстий нижнего решета выполнен, или выполнены, с возможностью изменения. Допустимы и другие параметры оборудования, соответствующие рабочему органу "очистное устройство".
При определении характеристики убираемой культуры как "кукуруза" и определении конфигурации оборудования как "очистное устройство с нижним решетом" посредством системы 10 помощи водителю выбирают стратегию управления процессом, которая содержит автоматическое управление очистным устройством 5. Если же, напротив, характеристику убираемого материала определяют как "кукуруза" и конфигурацию оборудования как "очистное устройство без нижнего решета", то посредством системы 10 помощи водителю выбирают стратегию управления процессом, которая содержит производимое оператором управление очистным устройством 5. Причина этого в представленном и в этом отношении предпочтительном варианте осуществления заключается в том, что автоматическое управление очистным устройством 5 производят в данном случае на основе определения по меньшей мере одного параметра недомолота, в частности объема недомолота и/или доли зерна в объеме недомолота. Без нижнего решета 5с выход недомолота 9 вообще не происходит или происходит в совершенно незначительной степени, так что вышеупомянутые параметры недомолота не позволяют сделать надежные выводы, которые могут быть основанием для автоматического управления.
В случае, если нижнее решето 5с присутствует в наличии, и очистное устройство 5 управляется автоматически, как указано выше, то для настройки или оптимизации параметра рабочего процесса "Потери при очистке" возможны следующие мероприятия.
В случае определения увеличения доли зерна в объеме недомолота выше предопределенного порогового значения посредством системы 10 помощи водителю увеличивают размер отверстий нижнего решета. Это позволяет обеспечить возможность прохождения сквозь нижнее решето 5с тех зерен, которые ошибочно задерживались на нижнем решете 5с.
В случае, если возрастает доля незерновых компонентов, попадающих в зерновой бункер, возможная подходящая мера - увеличение объемного потока очистного вентилятора 5а.
Точно так же при определении повышения объема недомолота сверх предопределенного порогового значения возможно увеличение размера отверстий нижнего решета очистного устройства 5 и/или повышение объемного потока очистного вентилятора 5а.
Вышеуказанные мероприятия по регулированию или оптимизации параметра "Потери при очистке" процесса уборки урожая являются составной частью соответствующей стратегии управления этим процессом. В основу этих мероприятий могут быть положены параметры управления или регулирования и/или описанная выше совокупность характеристик. В зависимости от конфигурации оборудования возможна замена одной стратегии управления процессом другой сохраненной в памяти стратегией управления процессом, что, по существу, соответствует параметризации стратегии управления процессом.
В соответствии с еще одним техническим решением, которое имеет самостоятельное значение, заявлен описанный выше зерноуборочный комбайн 1 как таковой. На все варианты осуществления, предназначенные для предложенного способа, может быть сделана ссылка и для разъяснения зерноуборочного комбайна.
Список обозначений
1 зерноуборочный комбайн
2 жатка
3 молотильный аппарат
3а молотильный барабан
3b подбарабанье
4 сепарирующее устройство
5 очистное устройство
5а очистной вентилятор
5b верхнее решето
5с нижнее решето
6 распределительное устройство
7 транспортное устройство
8 зерновой бункер
9 недомолот
10 система помощи водителю
11 память
12 вычислительное устройство
13 оператор
14 интерфейс "человек-машина"
15 датчик передней зоны поля
16 датчик оборудования
В условия
K совокупность характеристик
Р стратегии управления процессом
Q критерий качества.
Реферат
Группа изобретений относится к сельскому хозяйству, а именно способу работы зерноуборочного комбайна и зерноуборочному комбайну, содержащему несколько рабочих органов и систему помощи водителю. Система (10) помощи водителю содержит память (11) для сохранения данных и вычислительное устройство (12) для обработки сохраненных в памяти (11) данных, согласно которому посредством системы (10) помощи водителю определяют характеристики убираемой культуры и конфигурацию оборудования, причем характеристики убираемой культуры включают в себя вид культуры, а конфигурация оборудования содержит оснащение механическими элементами и/или элементами управления по меньшей мере одного рабочего органа (2-6). Посредством системы (10) помощи водителю на основании характеристик убираемой культуры и конфигурации оборудования предварительно выбирают стратегию (Р) управления процессом из нескольких стратегий (Р) управления процессом, сохраненных в памяти (11) системы (10) помощи водителю, причем каждая из стратегий направлена на выполнение по меньшей мере одного критерия (Q) качества. Система (10) помощи водителю на основании предварительно выбранной стратегии (Р) управления процессом автоматически определяет по меньшей мере один параметр оборудования рабочих органов (2-6) и задает его для соответствующего рабочего органа (2-6). Предварительный выбор стратегии (Р) управления процессом посредством системы (10) помощи водителю выполняют посредством опроса сохраненных в памяти (11) условий, причем для этого в памяти (11) по меньшей мере одной стратегии (Р) управления процессом соответствует по меньшей мере одно условие, относящееся к характеристикам убираемой культуры, и по меньшей мере одно условие, относящееся к конфигурации оборудования, причем предварительный выбор стратегии (Р) управления процессом осуществляют только при исполнении всех соответствующих ей условий. 2 н. и 10 з.п. ф-лы, 2 ил.
Комментарии