Устройство для подачи штучных заготовок в рабочую зону пресса - SU1013041A1
Код документа: SU1013041A1
Чертежи
Описание
00
о
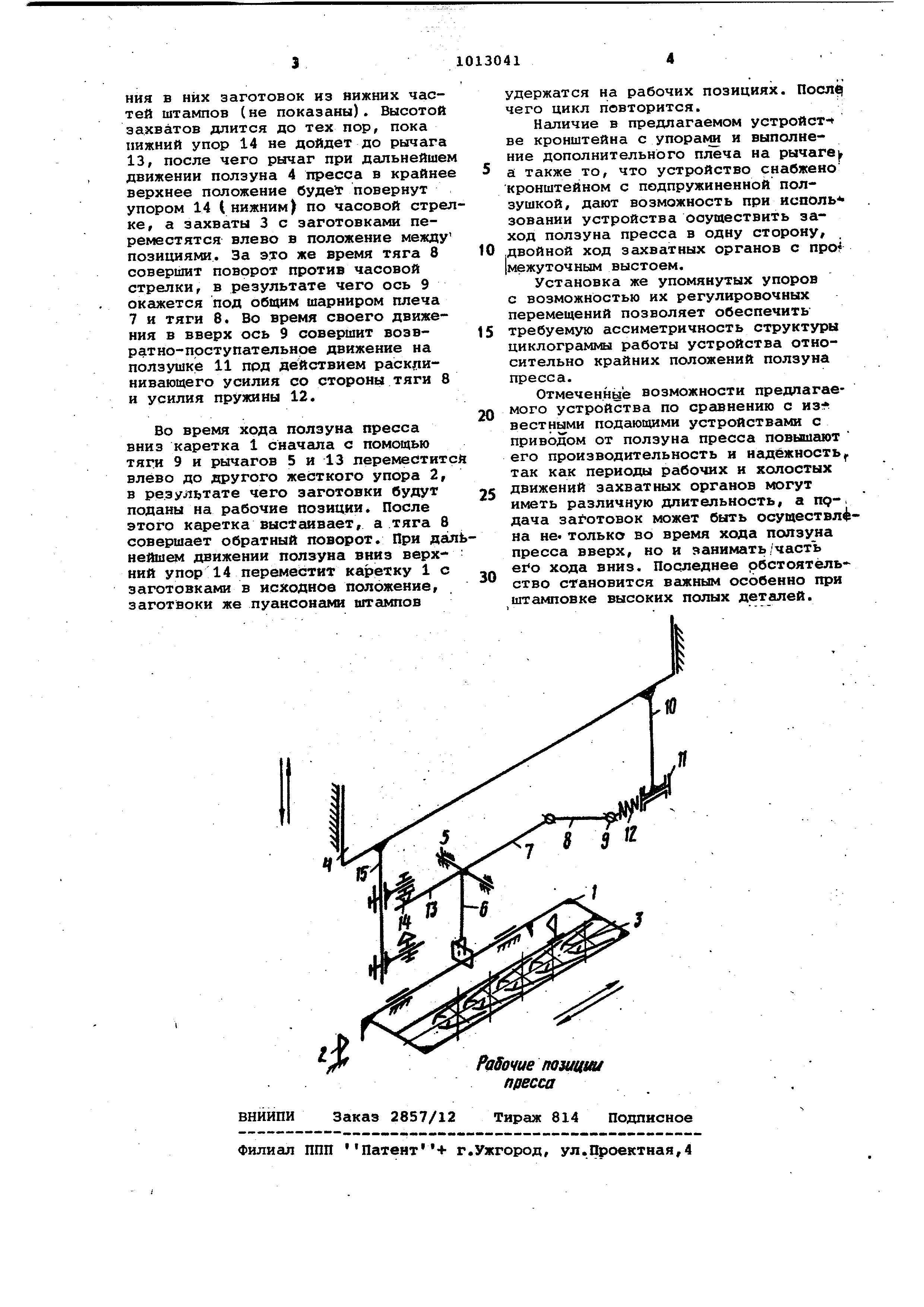
4 Изобретение относится к автомати зации и механизации обработки метал лов давлением и может быть, в частности, использовано для переме щения заготовок между рабочими пози циями многопозиционного пресса. Известнб устройство для подачи штучных заготовок в рабочую зону пресса и для перемещения их между позициями многопозиционного пресса содержащее захватные органы, получ щие возвратно-поступательное движение от вала пресса с помощью кулачковых механизмов через передаточные механизмы. Известное устройство может иметь любую циклограмму работы чем обеспечиваются наиболее благоприятные условия для подачи заго±овок CllОднако использование таких устройств требует применения специальных прессов или значительной перестройки универсальных машин, кроме того, переналадка устройства для работы по другой циклограмме требует обязательной смены кулачков. Наиболее близким по технической сущности к предлагаемому устройству является устройство, содержащее каретку с захватными органами, установленную с возможностью возвратно-поступательного перемещения и связанную с ползуном пресса через промежуточную тягу и смонтированный на основании рычаг. Такие устройства не требуют какой-либо модернизац П1 могут быть-установлены на универсальных машинах 21. Однако циклограмма их работы всегда симметрична относительно крайних положений ползуна пресса, кроме того, за каждый ход ползуна в одну сторону можно осуществить Столько одностороннее перемещение эахват ных органов, что снижает производительность таких устройств, особенно при подаче высоких полых изделий, например, при позиционных прессах, когда,значительную часть циклограммы подающего устройства за нимает выстаивание захватных органо на рабочих позициях. . Целью изобретения является повышение производительности устройства Указанная цель достигается тем, что устройство, содержащее каретку с захватными органами, установленную с возможностью возвратно-поступательного перемещения и связанную с ползуном пресса через промежуточную тягу, и смонтированный на основании рычаг, снабжено кронштейном с регулируемыми упорами и кронштейном с подпружиненной ползушкой, связанно.й с промежуточной тягой, причем рычаг выполнен с дополнитель ным плечом,, контактирующим с регу; лируемыми упорами. На чертеже приведена кинематическая схема устройства. Устройство содержит каретку 1, перемещающуюся между двумя жесткими упорами 2 и несущую подпружиненные захваты 3. Каретка 1 получает движение от ползуна 4 пресса с помощью смонтированного на оси 5 двуплечего рычага б, ведущее плечо 7 (на чертеже правое) которого шарнирно свяйано с ползуном через тягу 8, установ- : ленную на оси 9, которая в свою очередь размещена с помощью кронштейна 10 на ползуне 4 и имеет возможность поступательного перемещения с ползушкой 11, подпружиненной пружиной 12. На оси 5 укреплен дополнительный рычаг 13, с которым могут взаимодействовать упоры 14, предусмотренные на ползуне пресса. Упоры расположены относительно плоскости, проходящей через ось 5 и параллельной направлению перемещения ползуна, со стороны противоположной (на чертеже слева от этой плоскости) месту расположения оси 9. Для обеспечения асимметричной циклограммы работы устройства и двойного хода с промежуточным выстоем захватных органов за ход ползуна в .одну сторону упоры 14 расположены на кронштейне 15 с двух сторон от рычага 13. Расстояние между ними по направлению движения ползуна и их положения относительно оси 5 определяется величинами интервалов рабочих и холостых ходов и выстоев внутри циклограммы работы устройства, т.е. структурой циклограммы.. Изменение структуры циклограммы может быть обеспечено за счет регулировочного перемещения упоров вдоль направления движения ползуна и по нормали к этому направлению, для чего упоры установлены на кронштейне 15 с возможностью регулирования перемещения по указанным направлениям. Устройство работает следующим образом. При ходе ползуна пресса вверх (на чертеже изображено крайнее нижнее положение ползуна 4, при котором Захваты 3 расположены между рабочи1ми позициями пресса) рычаг 7 поворачивается тягой 8 против часовой стрелки, перемещая.каретку 1 ведомым плечом рычага б вправо до правого жесткого упора 2. При этом захваты совершают холостой ход и занимают положение на рабочих позициях при промежуточном положении ползуна 4 пресса. Во время дальнейшего хода ползуна 4 пресса вверх каретка с захватами выстаивает, а тяга 8 совершает поворот вокруг неподвижного в этот момент, общего ее с плечом 7 рычага шарнира. Высота захватов используется для заталкива

Реферат
УСТРОЙСТВО ДЛЯ ПОДАЧИ ШТУЧНЫХ ЗАГОТОВОК В РАБОЧУЮ ЗОНУ ПРЕССА, содержащее каретку с захватными органами, установленную с возможностью возвратно-поступательного перемещения и связанную с ползуном пресса через промежуточную тягу, и смонтированный на основании рычаг, отличающе е -с я тем, что, с целью повышения производительности, оно снабжено кронштейном с регулируемьаля упорами и кронштейном и подпружиненной ползушкой, связанной с промежуточной тягой, причем рычаг выполнен с дополнительным плечом, контактирующим с регулируемыми упорами .

Комментарии